Automated Longitudinal Control Based on Nonlinear Recursive B-Spline Approximation for Battery Electric Vehicles



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Driver Assistance Systems for Automated Longitudinal Control
1.2. Research Gap
1.3. Contribution
1.4. Outline
2. Energy Consumption of Battery Electric Research Vehicles
2.1. Research Vehicle
2.2. Driving Resistances
2.3. Power Train
2.4. Energy Consumption and Optimization Approach
3. Automated Longitudinal Control System
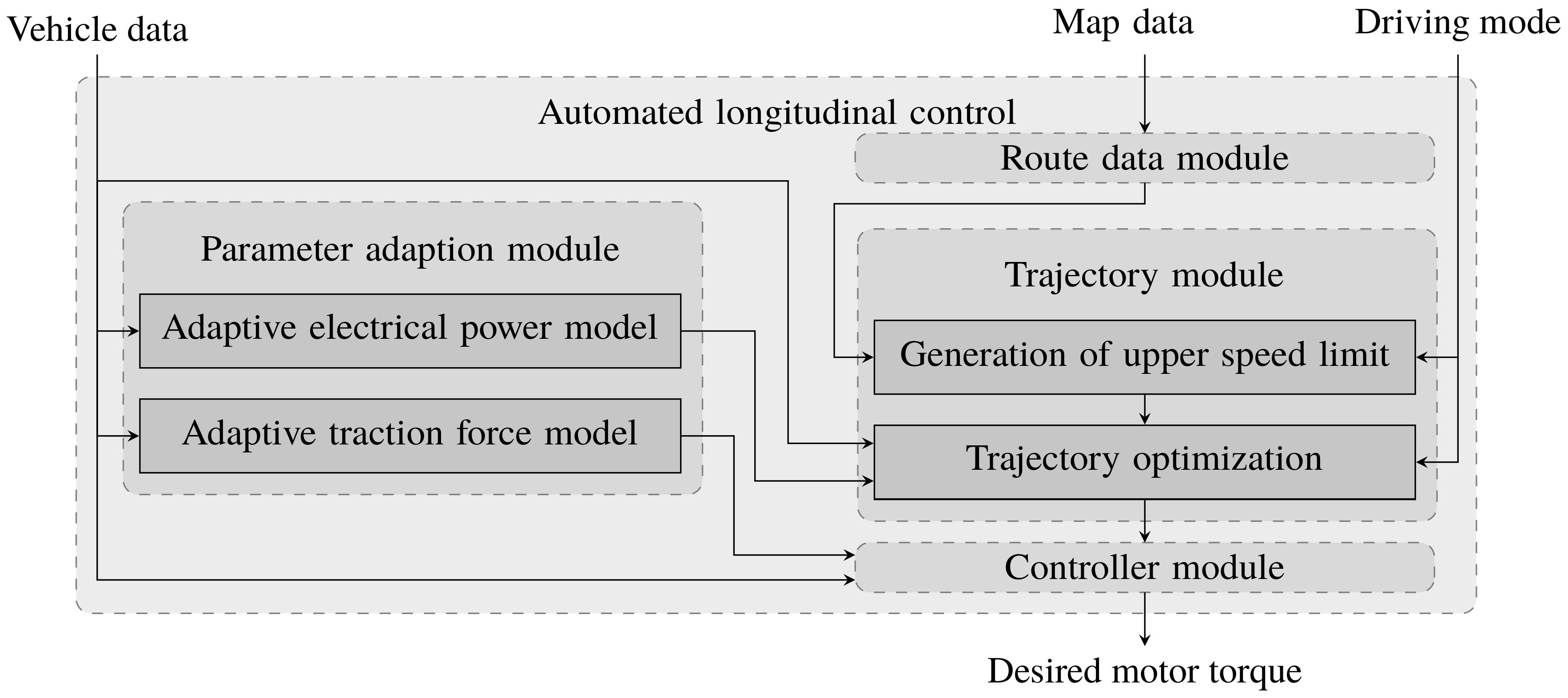
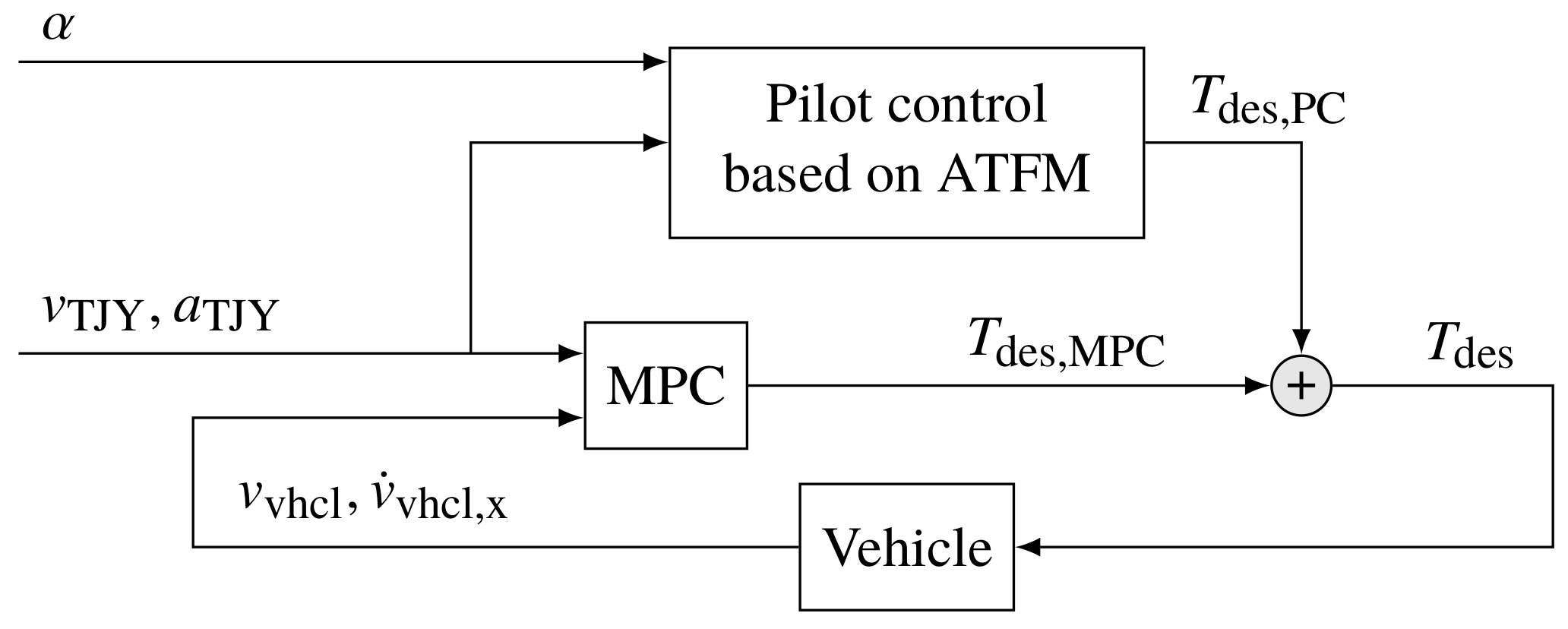
3.1. System Architecture
3.2. Parameter Adaption Module
3.3. Adaptive Traction Force Model
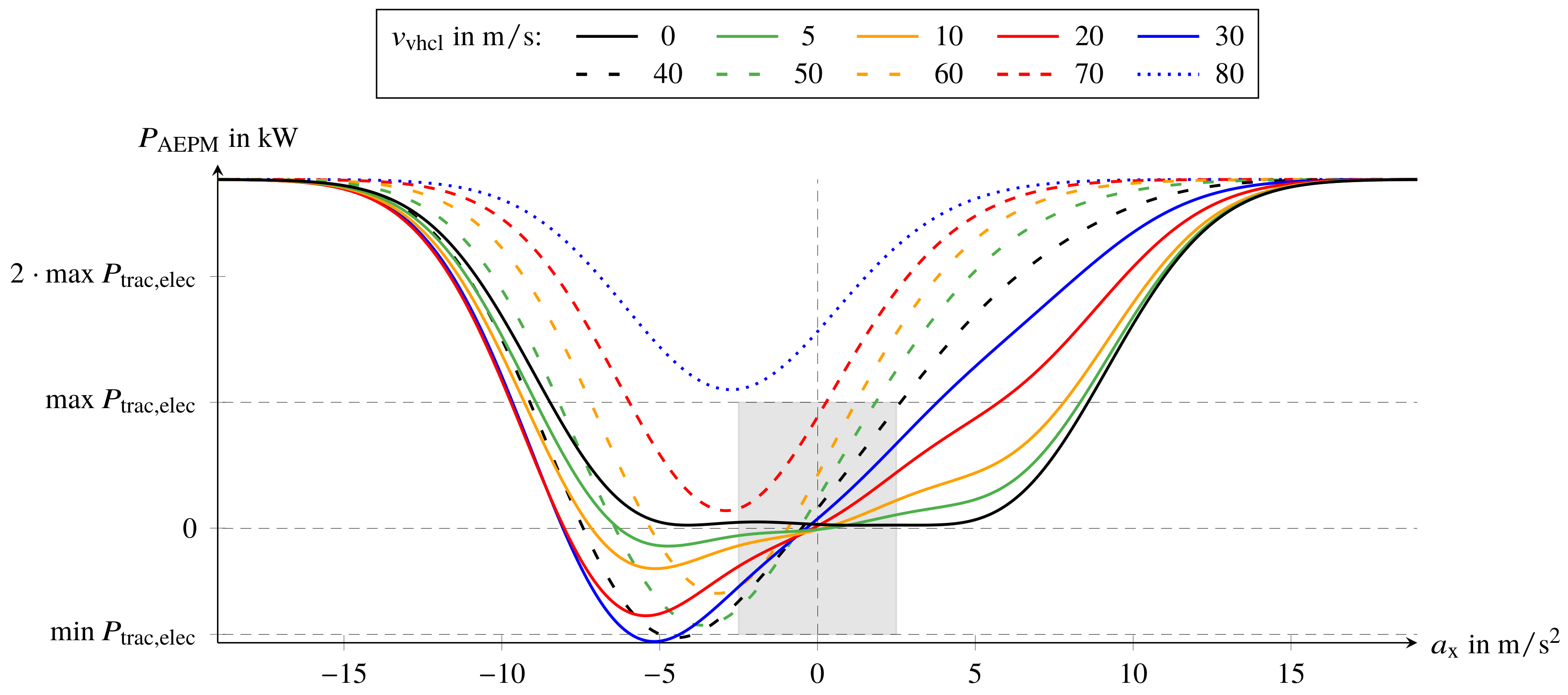
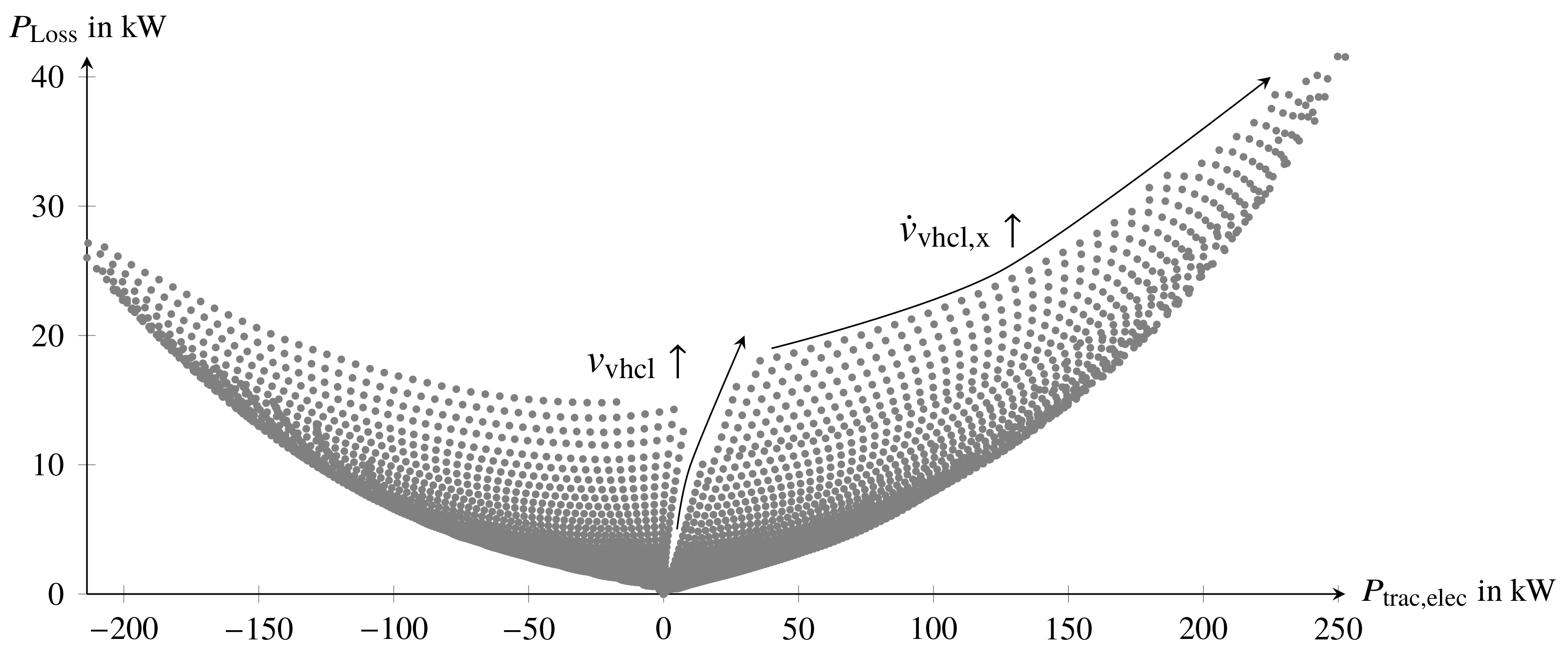
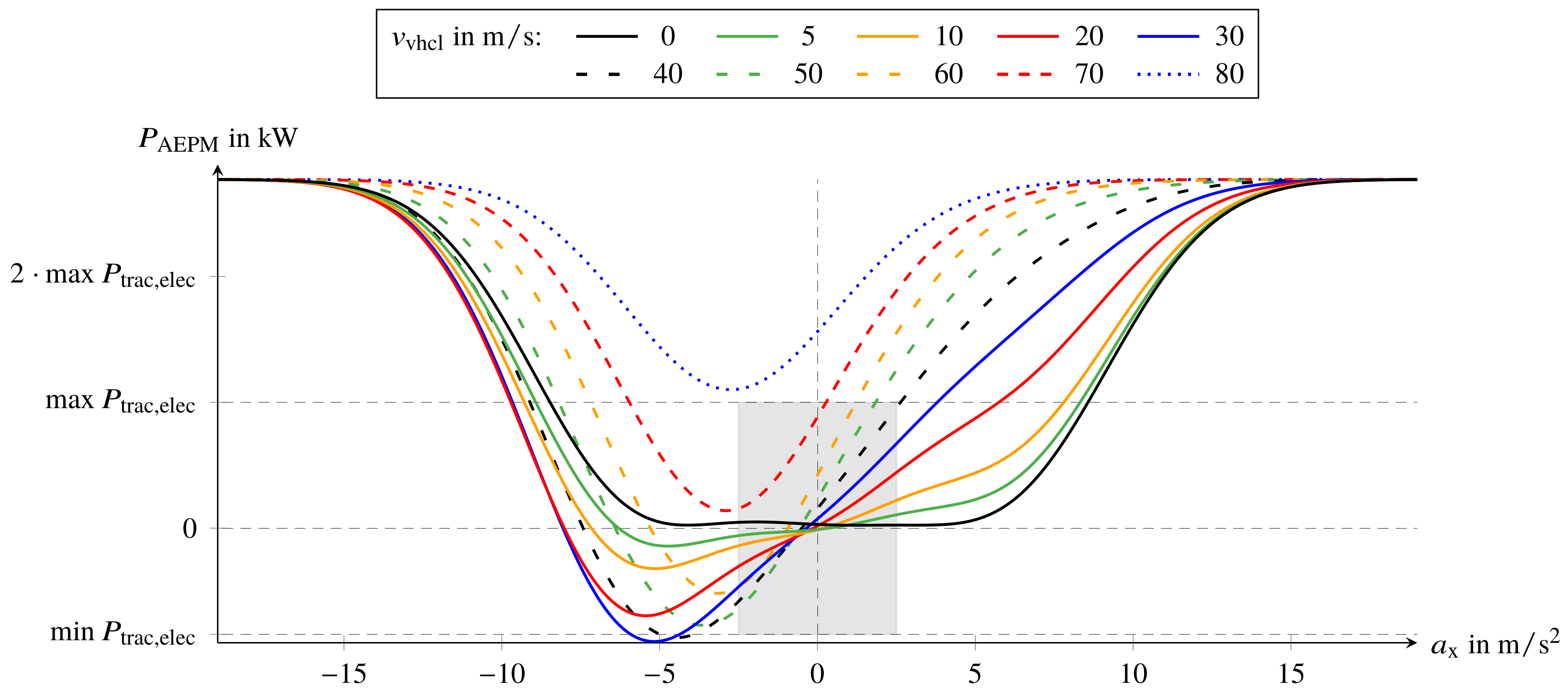
3.4. Adaptive Electrical Power Model
3.5. Route Data Module
3.6. Trajectory Module
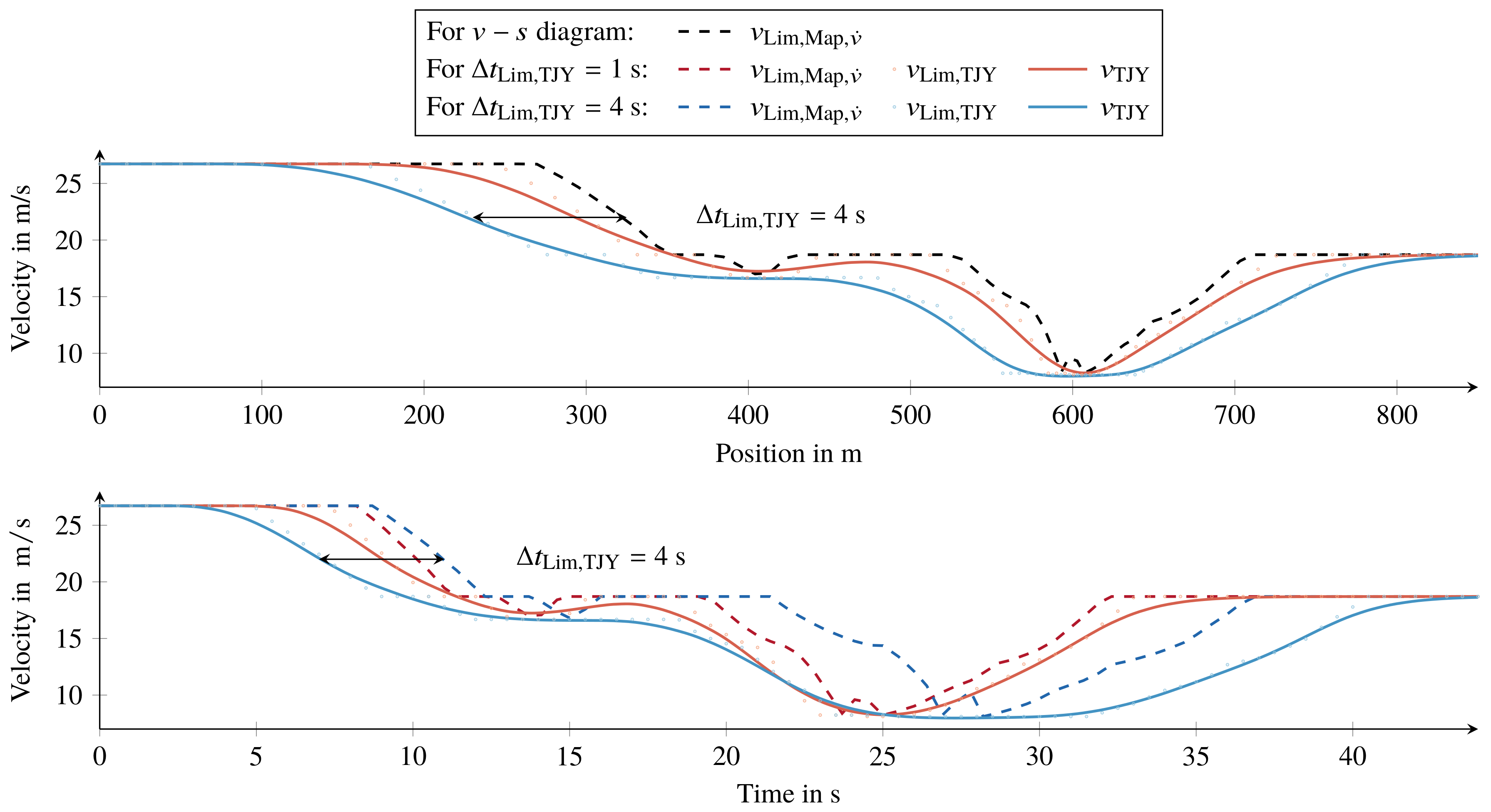
3.6.1. Generation of Upper Speed Limit
3.6.2. Representation of Velocity Trajectory
3.6.3. Trajectory Optimization
3.6.4. Trajectory Optimization with Consideration of Electrical Traction Power
3.6.5. Consideration of Additional Trajectory Constraints
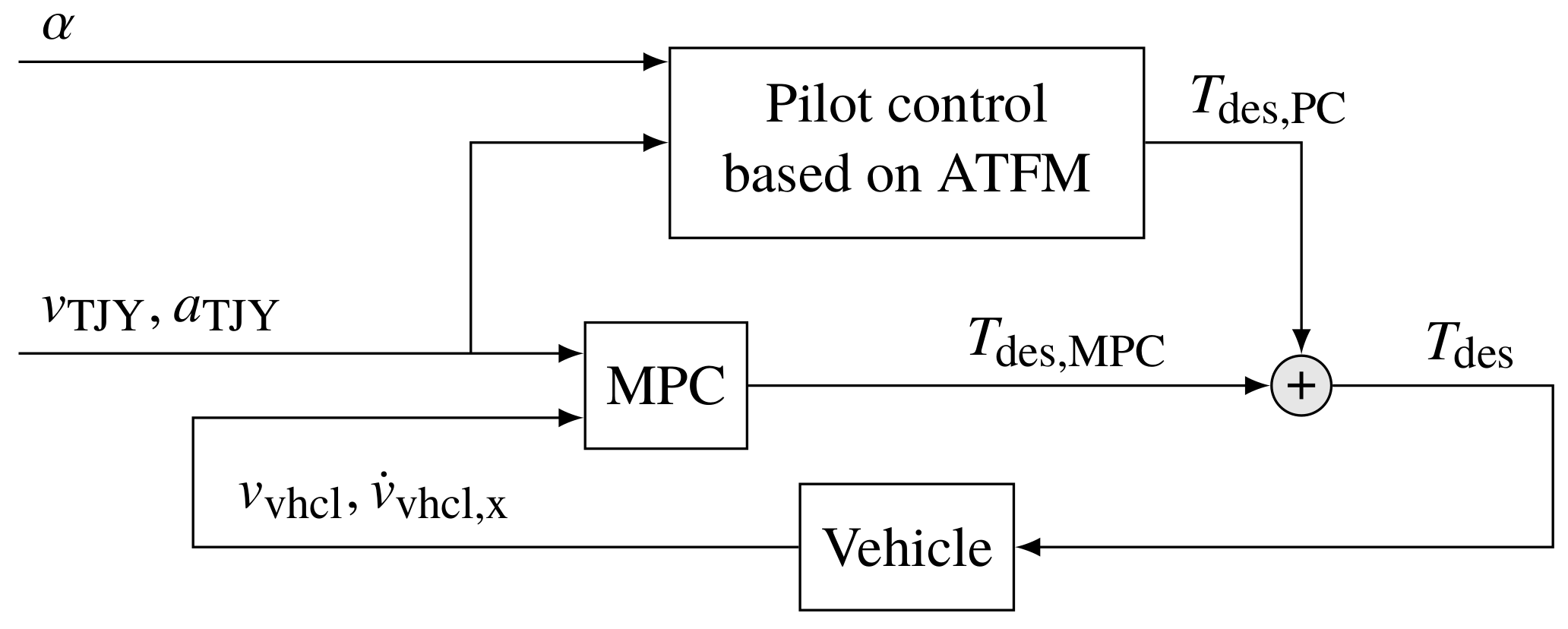
3.7. Controller Module
4. Testing and Evaluation of the Automated Longitudinal Control
4.1. Reference Route
4.2. Test Drives and Acceptance Test
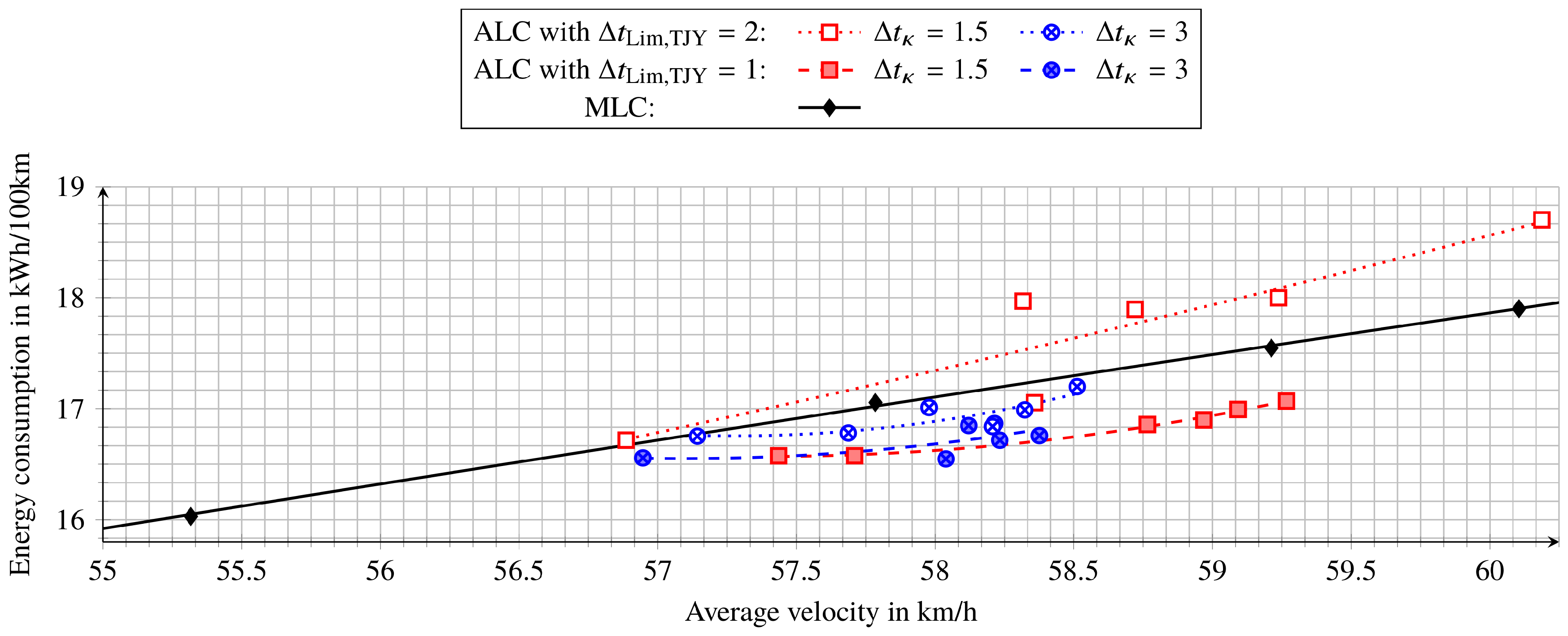
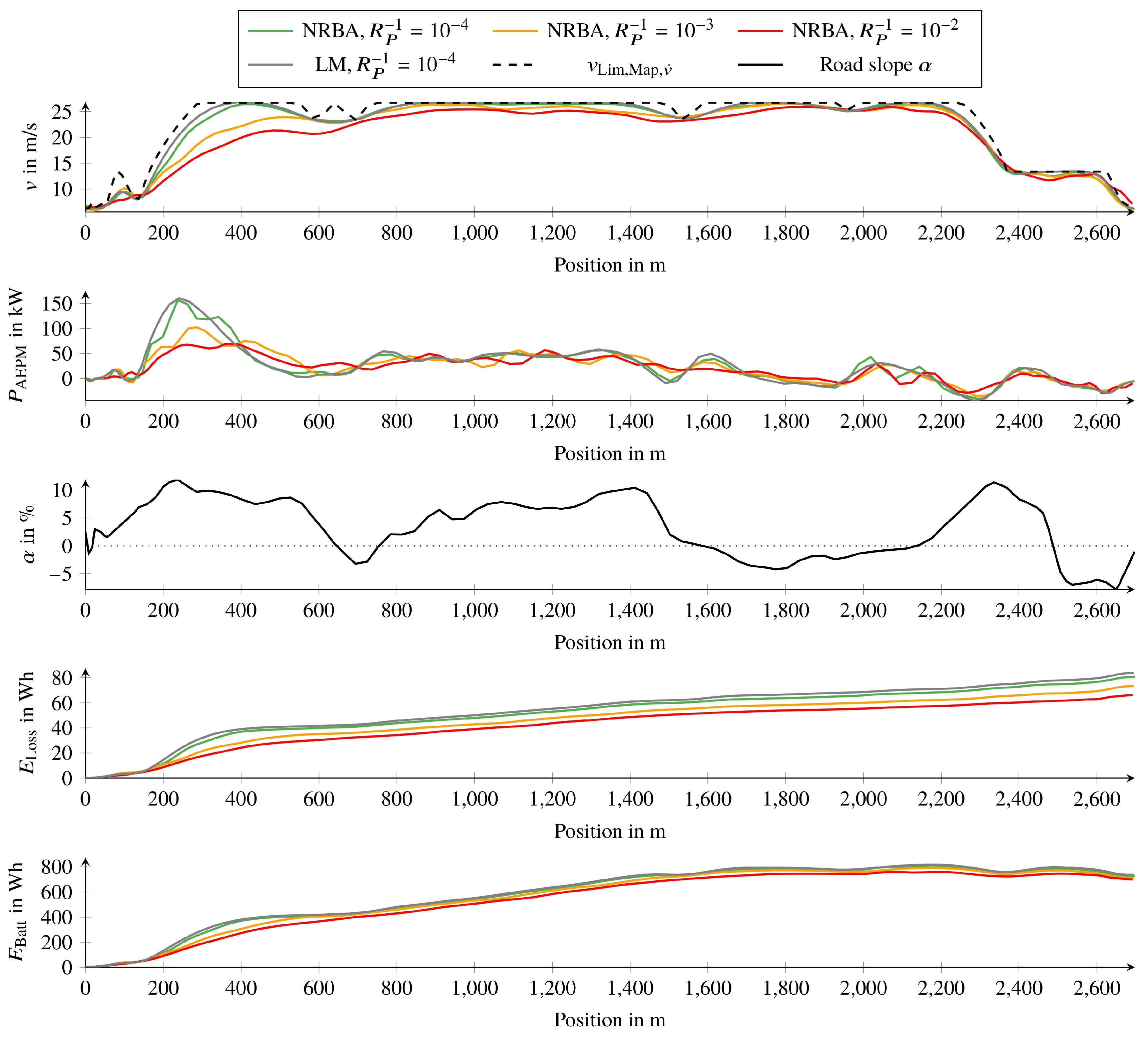
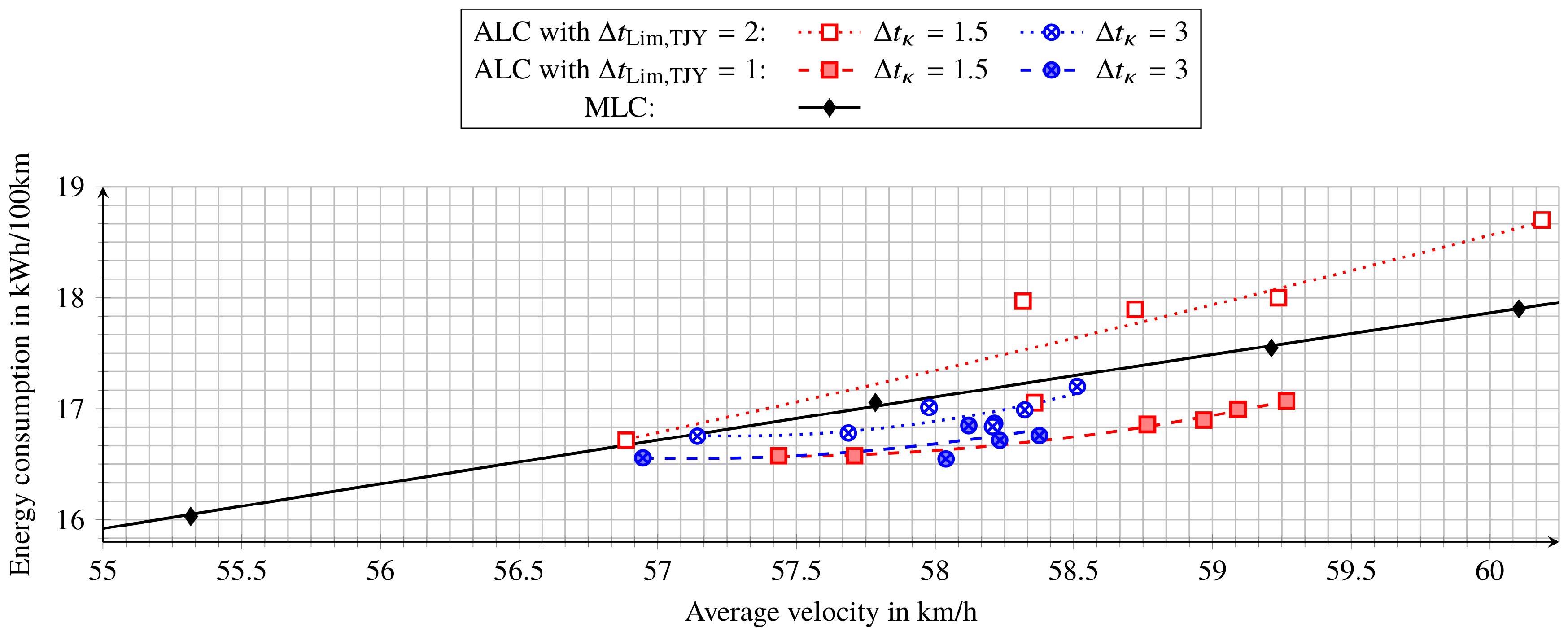
4.3. Energy-Saving Potential of Automated Longitudinal Control and Effects of Parameters
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dia, H.; Javanshour, F. Autonomous Shared Mobility-On-Demand: Melbourne Pilot Simulation Study. Transp. Res. Procedia 2017, 22, 285–296. [Google Scholar] [CrossRef]
- Winner, H.; Hakuli, S.; Lotz, F.; Singer, C. Handbook of Driver Assistance Systems-Basic Information, Components and Systems for Active Safety and Comfort; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Radke, T. Energieoptimale Längsführung von Kraftfahrzeugen durch Einsatz vorausschauender Fahrstrategien. Ph.D. Thesis, Karlsruhe Institute of Technology, Karlsruhe, Germany, 2013. [Google Scholar] [CrossRef]
- Markschläger, P.; Wahl, H.G.; Weberbauer, F.; Lederer, M. Assistenzsystem für mehr Kraftstoffeffizienz. In Vernetztes Automobil: Sicherheit–Car-IT–Konzepte; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2014; pp. 146–153. [Google Scholar] [CrossRef]
- Jauch, J.; Bleimund, F.; Frey, M.; Gauterin, F. An Iterative Method Based on the Marginalized Particle Filter for Nonlinear B-Spline Data Approximation and Trajectory Optimization. Mathematics 2019, 7, 355. [Google Scholar] [CrossRef]
- Passenberg, B. Theory and Algorithms for Indirect Methods in Optimal Control of Hybrid Systems. Ph.D. Thesis, Technische Universität München, München, Germany, 2012. [Google Scholar]
- Wahl, H.G. Optimale Regelung eines prädiktiven Energiemanagements von Hybridfahrzeugen. Ph.D. Thesis, Karlsruhe Institute of Technology, Karlsruhe, Germany, 2015. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R. Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming. Appl. Energy 2015, 155, 68–78. [Google Scholar] [CrossRef]
- Wu, D.; Li, Y.; Du, C.; Ding, H.; Li, Y.; Yang, X.; Lu, X. Fast velocity trajectory planning and control algorithm of intelligent 4WD electric vehicle for energy saving using time-based MPC. IET Intell. Transp. Syst. 2019, 13, 153–159. [Google Scholar] [CrossRef]
- Van Keulen, T.; Naus, G.; de Jager, B.; van de Molengraft, R.; Steinbuch, M.; Aneke, E. Predictive Cruise Control in Hybrid Electric Vehicles. World Electr. Veh. J. 2009, 3, 494–504. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Luo, Y.; Li, K.; Li, V. Real-Time Energy-Efficient Control for Fully Electric Vehicles Based on an Explicit Model Predictive Control Method. IEEE Trans. Veh. Technol. 2018, 67, 4693–4701. [Google Scholar] [CrossRef]
- Han, J.; Kum, D.; Park, Y. Sensitivity analysis for assessing robustness of position-based predictive energy management strategy for fuel cell hybrid electric vehicle. World Electr. Veh. J. 2015, 7, 330–341. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.; Kim, Y.G.; Kim, T.; Park, Y.I.; Cha, S.W. HEV Cruise Control Strategy on GPS (Navigation) Information. World Electr. Veh. J. 2009, 3, 589–596. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Gong, J.; Lv, C.; Chen, X.; Cao, D.; Chen, Y. A Personalized Behavior Learning System for Human-Like Longitudinal Speed Control of Autonomous Vehicles. Sensors 2019, 19, 3672. [Google Scholar] [CrossRef] [PubMed]
- Lv, C.; Hu, X.; Sangiovanni-Vincentelli, A.; Li, Y.; Martinez, C.M.; Cao, D. Driving-Style-Based Codesign Optimization of an Automated Electric Vehicle: A Cyber-Physical System Approach. IEEE Trans. Ind. Electr. 2019, 66, 2965–2975. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Bleimund, F.; Dörr, D.; Fath, B.; Frey, M. Verbundprojekt “Schlüsseltechnologien für die nächste Generation der Elektrofahrzeuge (e-generation)”: Teilvorhaben KIT: “Assistenzsysteme für effizienten Energieeinsatz bei Elektrofahrzeugen”: Schlussbericht: Laufzeit des Vorhabens: 01.02.2012–31.12.2014; Technical Report; Karlsruher Institut für Technologie, Institut für Fahrzeugsystemtechnik, Lehrstuhl für Fahrzeugtechnik: Karlsruhe, Germany, 2015. [Google Scholar] [CrossRef]
- Bleimund, F.; Rhode, S. Method, Computer Program Product, Device, and Vehicle for Calculating an Actuation Variable for the Operation of a Vehicle. German Patent EP2886409 (A1), 2015. [Google Scholar]
- Jauch, J.; Bleimund, F.; Rhode, S.; Gauterin, F. Recursive B-spline approximation using the Kalman filter. Eng. Sci. Technol. Int. J. 2017, 20, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Bargende, M.; Reuss, H.; Wiedemann, J. In Proceedings of the 14 Internationales Stuttgarter Symposium: Automobil- und Motorentechnik; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2014; pp. 19–29.
- Bender, S.; Chodura, H.; Groß, M.; Kühn, T.; Watteroth, V. e-generation—Ein Forschungsprojekt mit positiver Bilanz. Porsche Eng. Magazin 2015, 2, 22–27, Accessed 04/28/2018, 18:24. [Google Scholar]
- Zimmer, M. Durchgängiger Simulationsprozess zur Effizienzsteigerung und Reifegraderhöhung von Konzeptbewertungen in der Frühen Phase der Produktentstehung; Wissenschaftliche Reihe Fahrzeugtechnik Universität Stuttgart, Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2015; pp. 115–130. [Google Scholar]
- Braess, H.; Seiffert, U. Vieweg Handbuch Kraftfahrzeugtechnik; ATZ/MTZ-Fachbuch, Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2013. [Google Scholar]
- Schramm, D.; Hiller, M.; Bardini, R. Vehicle Dynamics—Modeling and Simulation; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems: Introduction to Modeling and Optimization, 3rd ed.; Springer: Berlin, Germany, 2013. [Google Scholar]
- Vaillant, M. Design Space Exploration zur multikriteriellen Optimierung elektrischer Sportwagenantriebsstränge. Ph.D. Thesis, Karlsruhe Institute of Technology, Karlsruhe, Germany, 2016. [Google Scholar] [CrossRef]
- Qi, Z. Advances on air conditioning and heat pump system in electric vehicles—A review. Renew. Sustain. Energy Rev. 2014, 38, 754–764. [Google Scholar] [CrossRef]
- Rhode, S.; Bleimund, F.; Gauterin, F. Recursive Generalized Total Least Squares with Noise Covariance Estimation. IFAC Proc. Volumes 2014, 47, 4637–4643. [Google Scholar] [CrossRef] [Green Version]
- Ricciardi, V.; Acosta, M.; Augsburg, K.; Kanarachos, S.; Ivanov, V. Robust Brake Linings Friction Coefficient Estimation For Enhancement of EHB Control. In Proceedings of the 2017 XXVI International Conference on Information, Communication and Automation Technologies (ICAT), Sarajevo, Bosnia and Herzegovina, 26–28 October 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Zhou, M.; Jin, H.; Wang, W. A review of vehicle fuel consumption models to evaluate eco-driving and eco-routing. Transp. Res. Part D 2016, 49, 203–218. [Google Scholar] [CrossRef]
- Rhode, S.; Hong, S.; Hedrick, J.K.; Gauterin, F. Vehicle tractive force prediction with robust and windup-stable Kalman filters. Control Eng. Pract. 2016, 46, 37–50. [Google Scholar] [CrossRef]
- Stenlund, B.; Gustafsson, F. Avoiding windup in recursive parameter estimation. Prepr. Reglermöte 2002, 148–153. Available online: http://users.isy.liu.se/en/rt/fredrik/reports/02reglermoteakf.pdf (accessed on 10 July 2018).
- Van Vaerenbergh, S.; Santamaria, I.; Liu, W.; Principe, J.C. Fixed-Budget Kernel Recursive Least-Squares. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP 2010), Dallas, TX, USA, 15–19 March 2010. [Google Scholar]
- Van Vaerenbergh, S.; Santamaría, I. A Comparative Study of Kernel Adaptive Filtering Algorithms. In Proceedings of the 2013 IEEE Digital Signal Processing (DSP) Workshop and IEEE Signal Processing Education (SPE), Napa, CA, USA, 11–14 August 2013. [Google Scholar] [CrossRef]
- Schimmelpfennig, K.-H.; Hebing, N. Geschwindigkeiten bei kreisförmiger Kurvenfahrt/Stabilitäts- und Sicherheitsgrenze. Der Verkehrsunfall 1982, 20, 97–99. [Google Scholar]
- Sherar, P.A. Variational Based Analysis and Modelling Using B-splines. Ph.D. Thesis, Cranfield University, Cranfield, UK, 2003. [Google Scholar]
- Carvalho, A.; Gao, Y.; Gray, A.; Tseng, E.; Borrelli, F. Predictive control of an autonomous ground vehicle using an iterative linearization approach. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, ITSC, Hague, The Netherlands, 6–9 October 2013; pp. 2335–2340. [Google Scholar]
- Falcone, P.; Tufo, M.; Borrelli, F.; Asgari, J.; Tseng, H.E. A linear time varying model predictive control approach to the integrated vehicle dynamics control problem in autonomous systems. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2980–2985. [Google Scholar] [CrossRef]
- Jauch, J. ALC Matlab Files. 2019. Available online: http://github.com/JensJauch/ALC/releases (accessed on 14 July 2019). [CrossRef]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. Control Theory Appl. IET 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805–1824. [Google Scholar] [CrossRef] [PubMed] [Green Version]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jauch, J.; Bleimund, F.; Frey, M.; Gauterin, F. Automated Longitudinal Control Based on Nonlinear Recursive B-Spline Approximation for Battery Electric Vehicles. World Electr. Veh. J. 2019, 10, 52. https://doi.org/10.3390/wevj10030052
Jauch J, Bleimund F, Frey M, Gauterin F. Automated Longitudinal Control Based on Nonlinear Recursive B-Spline Approximation for Battery Electric Vehicles. World Electric Vehicle Journal. 2019; 10(3):52. https://doi.org/10.3390/wevj10030052
Chicago/Turabian StyleJauch, Jens, Felix Bleimund, Michael Frey, and Frank Gauterin. 2019. "Automated Longitudinal Control Based on Nonlinear Recursive B-Spline Approximation for Battery Electric Vehicles" World Electric Vehicle Journal 10, no. 3: 52. https://doi.org/10.3390/wevj10030052
APA StyleJauch, J., Bleimund, F., Frey, M., & Gauterin, F. (2019). Automated Longitudinal Control Based on Nonlinear Recursive B-Spline Approximation for Battery Electric Vehicles. World Electric Vehicle Journal, 10(3), 52. https://doi.org/10.3390/wevj10030052