
A Method for the Rapid Propagation of Emergency Event Notifications in a Long Vehicle Convoy
Abstract
1. Introduction
1.1. String Stability
1.2. Communication Protocols
1.3. Communication Channels
1.4. Ad Hoc Routing Protocols
2. Problem Statement
- Eventual Consistency. There should be no dropped messages.
- Speed of Dissemination. Ideally, it should propagate a message through the convoy in less than 100ms (the minimum delay between BSM transmissions).
- Channel Efficiency. The number of additional transmissions and the amount of extra data attached to existing transmissions are minimized.
3. Simulation Environment and the Convoy VANET System
3.1. Simulated Wireless Channel
3.2. Simulated Wireless Procotol
3.3. OLSR and AODV
3.4. Convoy VANET System
3.4.1. Senders
3.4.2. Receivers and Data Storage
3.4.3. Routing Protocol
| Algorithm 1: Handler Function for Received SM List |
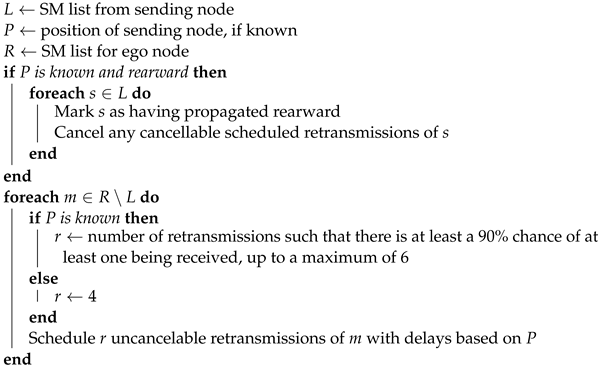 |
| Algorithm 2: Route Input Function for SM |
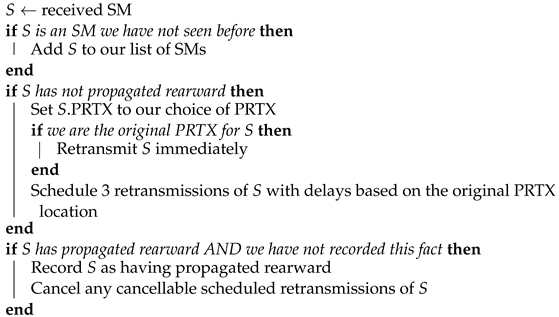 |
4. Experiment Parameters and Tests
- : Minimum reception probability to be eligible as a PRTX.
- : Delay time per unit distance for distance-based SM delays; see Equation (1).
- : Random component minimum for distance-based SM delays; see Equation (1).
- : Random component range for distance-based SM delays; see Equation (1).
- : Random component minimum for non-distance-based SM delays; see Equation (2).
- : Random component range for non-distance-based SM delays; see Equation (2).
- : Transmission keep-out time; only one SM transmission may occur within this amount of time.
- : Path loss exponent for log-distance loss model.
- : Reference distance for log-distance loss model.
- : Reference loss for log-distance loss model.
- : Nakagami loss model distance 1.
- : Nakagami loss model distance 2.
- : Nakagami loss model m value for distances from 0 to .
- : Nakagami loss model m value for distances from to .
- : Nakagami loss model m value for distances from and beyond.
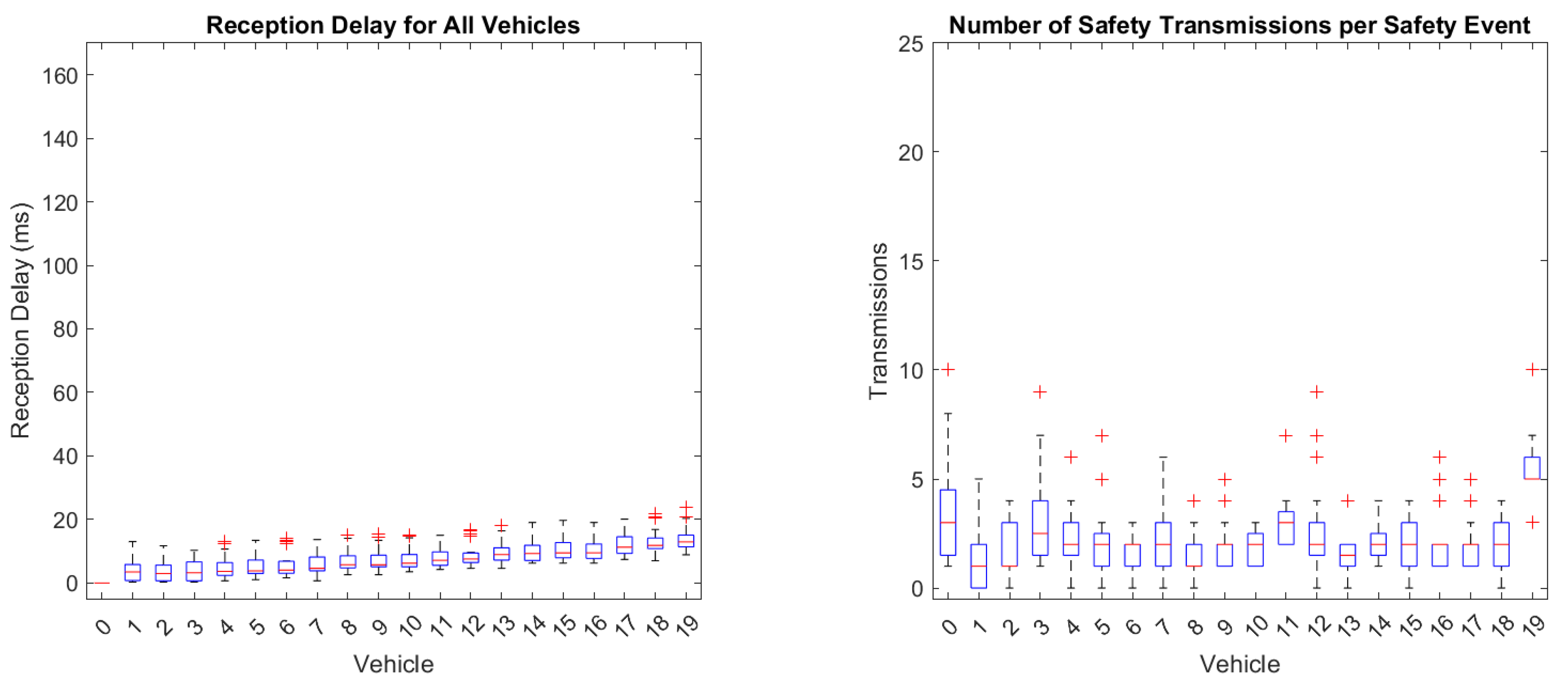
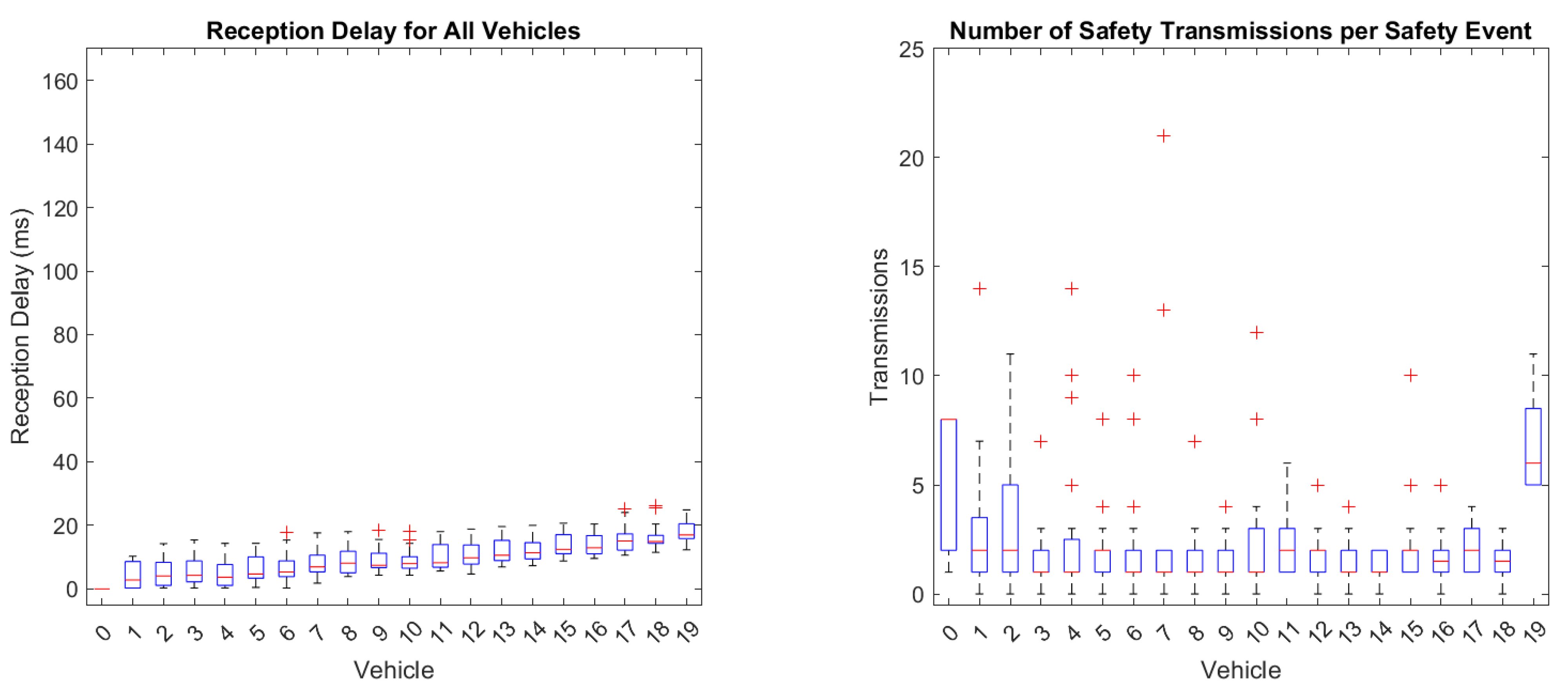
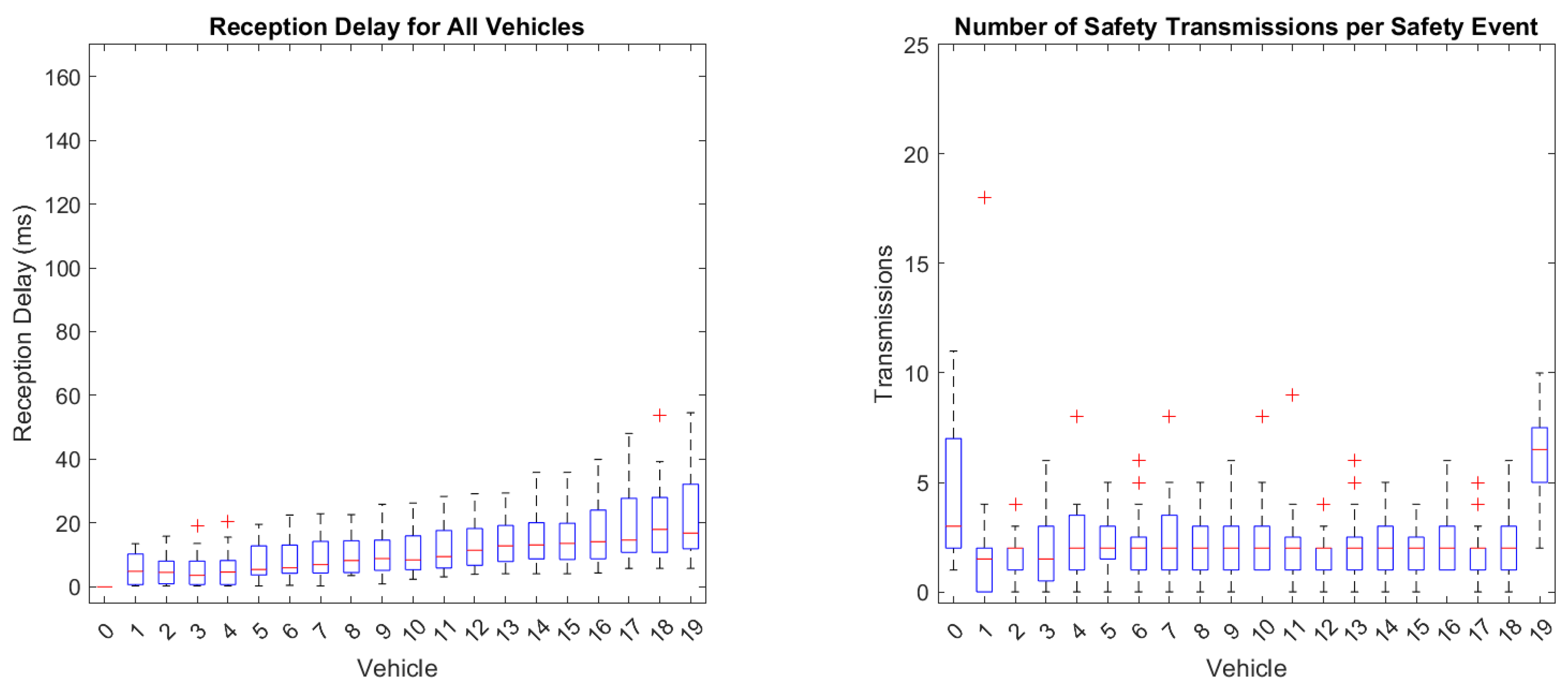
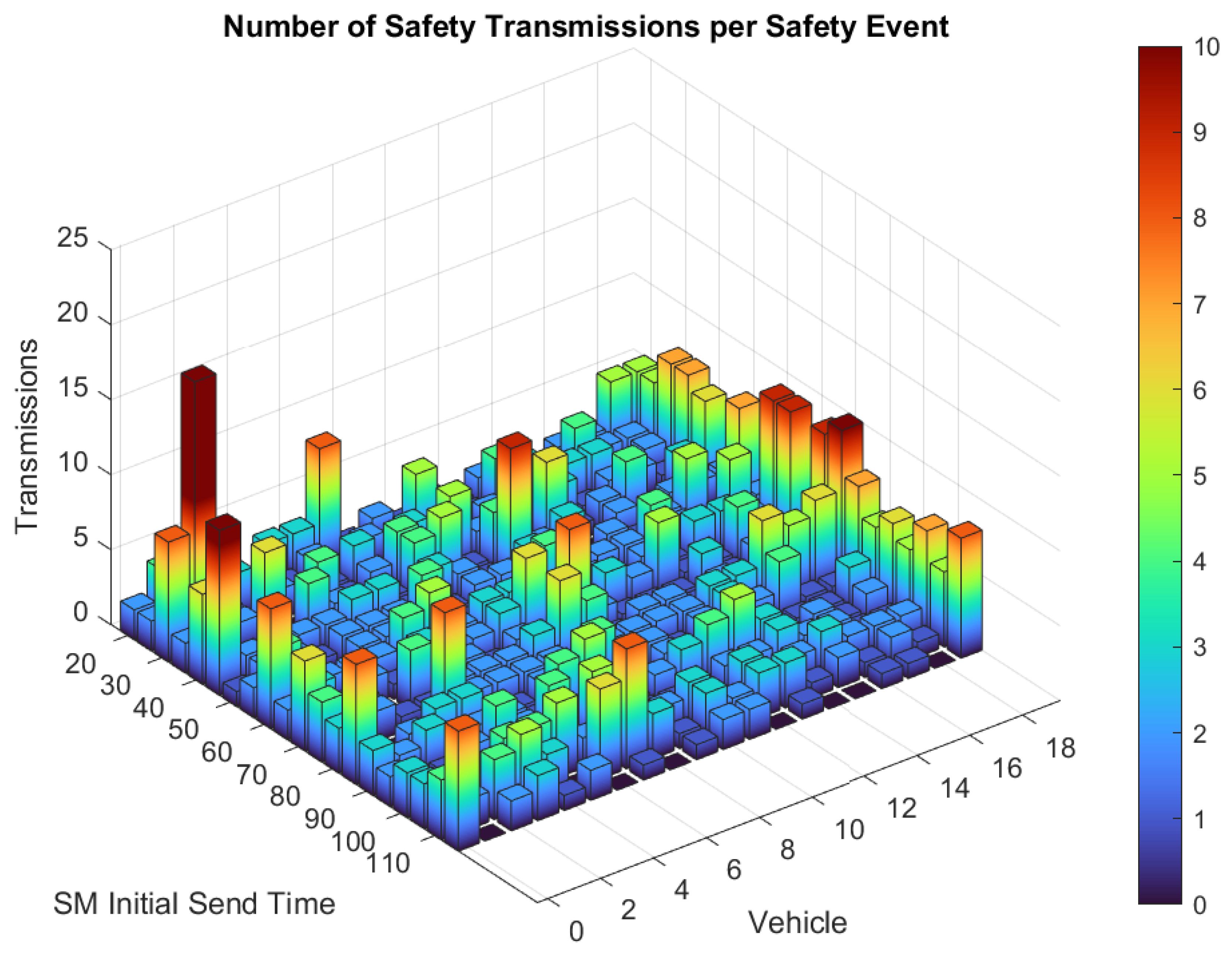
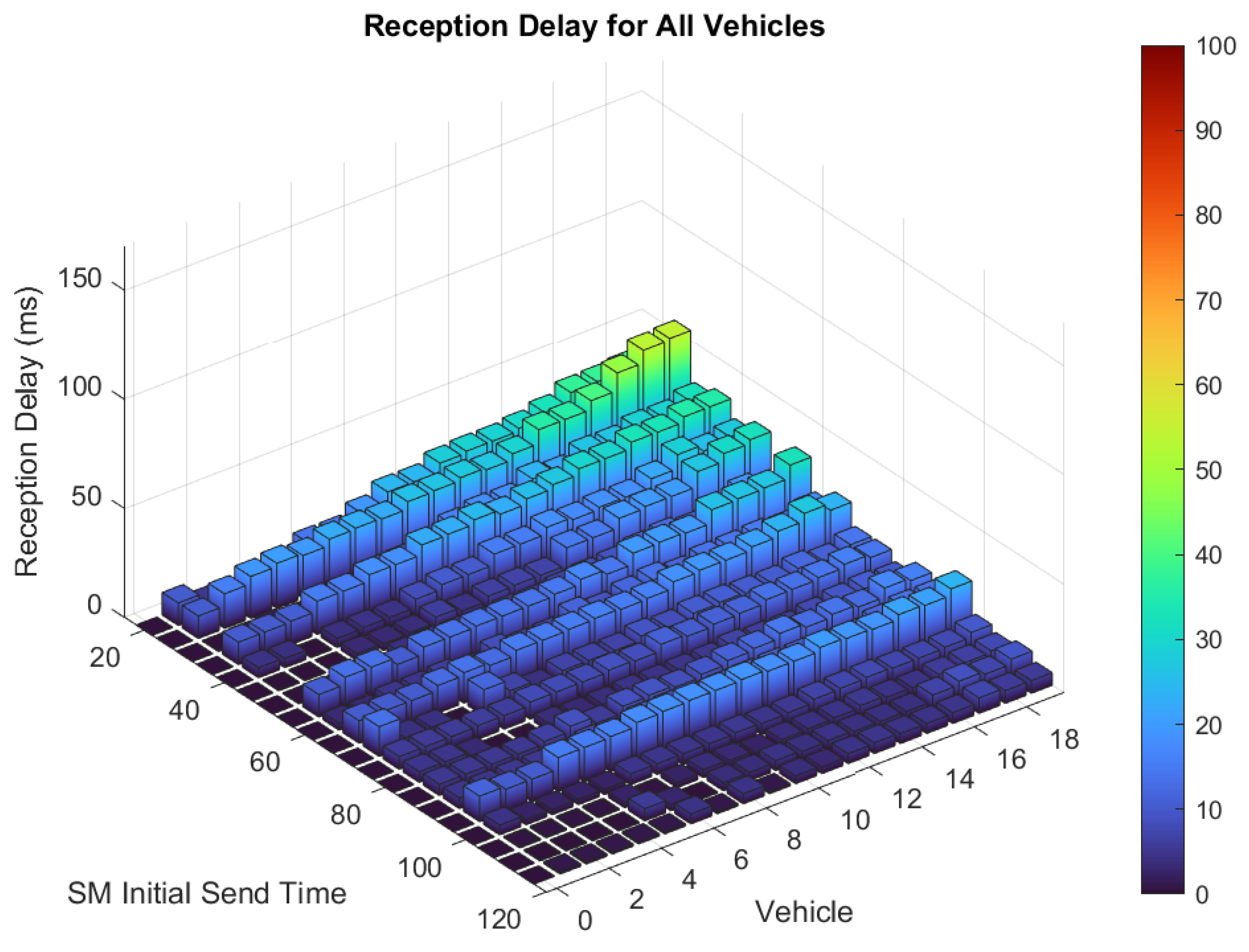
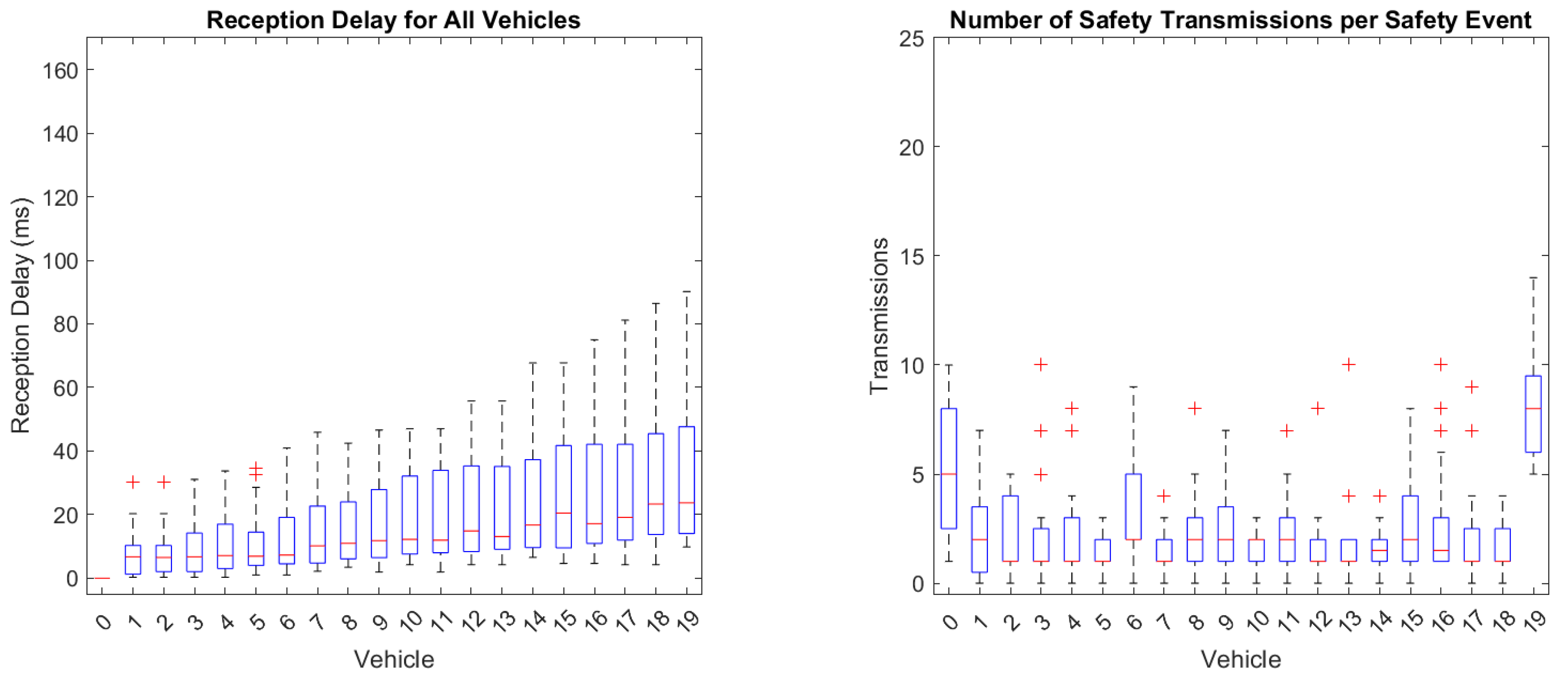
5. Results
5.1. Known Behavioral Anomalies
5.2. General Trends and Analysis
5.3. Outliers
6. Conclusions
7. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
Distribution Statement A
Abbreviations
| ITS | Intelligent Transportation System; |
| SAE | Society of Automotive Engineers; |
| V2V | Vehicle-to-Vehicle; |
| BSM | Basic Safety Message; |
| VANET | Vehicular Ad Hoc Network; |
| SM | Safety Message; |
| PRTX | Preferred Retransmitter; |
| VS | Vehicle State; |
| ns3 | Network Simulator 3. |
References
- Global Truck Driver Shortage to Double by 2028, Says New IRU Report. Available online: https://www.iru.org/news-resources/newsroom/global-truck-driver-shortage-double-2028-says-new-iru-report (accessed on 8 January 2024).
- McAuliffe, B.; Raeesi, A.; Lammert, M.; Smith, P.; Hoffman, M.; Bevly, D. Impact of Mixed Traffic on the Energy Savings of a Truck Platoon. SAE Int. J. Adv. Curr. Prac. Mobil. 2020, 2, 1472–1496. [Google Scholar] [CrossRef]
- McAuliffe, B.; Lammert, M.; Lu, X.Y.; Shladover, S.; Surcel, M.D.; Kailas, A. Influences on Energy Savings of Heavy Trucks Using Cooperative Adaptive Cruise Control; SAE Technical Paper 2018-01–1181; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2018.
- Lammert, M.; Duran, A.; Diez, J.; Burton, K. Effect of Platooning on Fuel Consumption of Class 8 Vehicles Over a Range of Speeds, Following Distances, and Mass. In Proceedings of the SAE COMVEC, Rosemont, IL, USA, 7–9 October 2014; pp. 626–639. [Google Scholar]
- McAuliffe, B.; Smith, P.; Raeesi, A.; Hoffman, M.; Bevly, D. Track-Based Aerodynamic Testing of a Two-Truck Platoon. SAE Int. J. Adv. Curr. Prac. Mobil. 2021, 3, 1450–1472. [Google Scholar] [CrossRef]
- Seiler, P.; Pant, A.; Hendrick, K. Disturbance propagation in vehicle strings. IEEE Trans. Autom. Control 2004, 49, 1835–1842. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Platooning with IVC-Enabled Autonomous Vehicles: Strategies to Mitigate Communication Delays, Improve Safety and Traffic Flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Zheng, Y.; Eben Li, S.; Wang, J.; Cao, D.; Li, K. Stability and Scalability of Homogeneous Vehicular Platoon: Study on the Influence of Information Flow Topologies. IEEE Trans. Intell. Transp. Syst. 2016, 17, 14–26. [Google Scholar] [CrossRef]
- Ning, R.; Lin, S. Efficient Platoon Strategy Design with Guaranteed String Stability based on C-V2X Autonomous Mode. In Proceedings of the IEEE Globecom Workshops, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 407–412. [Google Scholar]
- Samii, A.; Bekiaris-Liberis, N. Robustness of String Stability of Linear Predictor-Feedback CACC to Communication Delay. In Proceedings of the IEEE 26th International Conference on Intelligent Transportation Systems, Bilbao, Spain, 24–28 September 2023; pp. 4853–4858. [Google Scholar]
- Tian, B.; Deng, X.; Xu, Z.; Zheng, Y.; Zhao, X. Modeling and Numerical Analysis on Communication Delay Boundary for CACC String Stability. IEEE Access 2019, 7, 168870–168884. [Google Scholar] [CrossRef]
- DSRC Technical Committee. SAE J2945/1_201603. Available online: https://www.sae.org/standards/content/j2945/1_201603/ (accessed on 15 January 2024).
- Molisch, A.F.; Tufvesson, F.; Karedal, J.; Mecklenbrauker, C.F. A survey on vehicle-to-vehicle propagation channels. IEEE Wirel. Commun. 2009, 16, 12–22. [Google Scholar] [CrossRef]
- Viriyasitavat, W.; Boban, M.; Tsai, H.-M.; Vasilakos, A. Vehicular Communications: Survey and Challenges of Channel and Propagation Models. IEEE Veh. Technol. Mag. 2015, 10, 55–66. [Google Scholar] [CrossRef]
- Cheng, L.; Henty, B.E.; Stancil, D.D.; Bai, F.; Mudalige, P. Mobile Vehicle-to-Vehicle Narrow-Band Channel Measurement and Characterization of the 5.9 GHz Dedicated Short Range Communication (DSRC) Frequency Band. IEEE JSAC 2007, 25, 1501–1506. [Google Scholar] [CrossRef]
- Li, F.; Want, Y. Routing in vehicular ad hoc networks: A survey. IEEE Veh. Technol. Mag. 2007, 2, 12–22. [Google Scholar] [CrossRef]
- Koubek, M.; Rea, S.; Pesch, D. A Novel Reactive Routing Protocol for Applications in Vehicular Environments. In Proceedings of the 11th International Symposium on Wireless Personal Multimedia Communications, Lapland, Finland, 11 September 2008. [Google Scholar]
- Sasaki, Y.; Lee, W.-C.; Hara, T.; Nishio, S. On Alleviating Beacon Overhead in Routing Protocols for Urban VANETs. In Proceedings of the IEEE 14th International Converence on Mobile Data Management, Milan, Italy, 3–6 June 2013; pp. 66–76. [Google Scholar]
- Liu, B.; Han, W.; Jiang, W.; Jia, D.; Wang, E.; Wang, J.; Qiao, C. A Novel V2V-Based Temporary Warning Network for Safety Message Dissemination in Urban Environments. IEEE Internet Things J. 2022, 9, 25136–25149. [Google Scholar] [CrossRef]
- Clausen, T.; Jacquet, P. Optimized Link State Routing Protocol (OLSR), RFC 3626. October 2003. Available online: https://www.rfc-editor.org/info/rfc3626 (accessed on 15 January 2024).
- Perkins, C.; Belding-Royer, E.; Das, S. Ad hoc On-Demand Distance Vector (AODV) Routing, RFC 3561. July 2003. Available online: https://www.rfc-editor.org/rfc/rfc3561.html (accessed on 15 January 2024).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance | Approximate Reception Reliability |
|---|---|
| 10 m | 95% |
| 30 m | 85% |
| 60 m | 65% |
| 90 m | 30% |
| 120 | 15% |
| 150 | 5% |
| More than 200 m 1 | 0% |
| Standard | Double Delay | Double Random | |
|---|---|---|---|
| 0.70 | 0.70 | 0.70 | |
| 0.02 ms/m | 0.04 ms/m | 0.02 ms/m | |
| 0.00 s | 0.00 s | 0.00 s | |
| 1.0 ms | 2.0 ms | 2.0 ms | |
| 2.5 ms | 5.0 ms | 2.5 ms | |
| 2.5 ms | 5.0 ms | 5.0 ms | |
| 1.0 ms | 2.0 ms | 2.0 ms | |
| 1.0 ms | 1.0 ms | 1.0 ms | |
| 2.00 | 2.00 | 2.00 | |
| 1.00 m | 1.00 m | 1.00 m | |
| 58 dB | 58 dB | 58 dB | |
| 5.00 m | 5.00 m | 5.00 m | |
| 101.00 m | 101.00 m | 101.00 m | |
| 2.00 | 2.00 | 2.00 | |
| 0.65 | 0.65 | 0.65 | |
| 0.50 | 0.50 | 0.50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sprunger, J.D.; Lim, A.; Bevly, D.M. A Method for the Rapid Propagation of Emergency Event Notifications in a Long Vehicle Convoy. Future Internet 2024, 16, 154. https://doi.org/10.3390/fi16050154
Sprunger JD, Lim A, Bevly DM. A Method for the Rapid Propagation of Emergency Event Notifications in a Long Vehicle Convoy. Future Internet. 2024; 16(5):154. https://doi.org/10.3390/fi16050154
Chicago/Turabian StyleSprunger, John David, Alvin Lim, and David M. Bevly. 2024. "A Method for the Rapid Propagation of Emergency Event Notifications in a Long Vehicle Convoy" Future Internet 16, no. 5: 154. https://doi.org/10.3390/fi16050154
APA StyleSprunger, J. D., Lim, A., & Bevly, D. M. (2024). A Method for the Rapid Propagation of Emergency Event Notifications in a Long Vehicle Convoy. Future Internet, 16(5), 154. https://doi.org/10.3390/fi16050154