A Review of Machine Learning and IoT in Smart Transportation

 ,
,  , and
, and 
Abstract
:1. Introduction
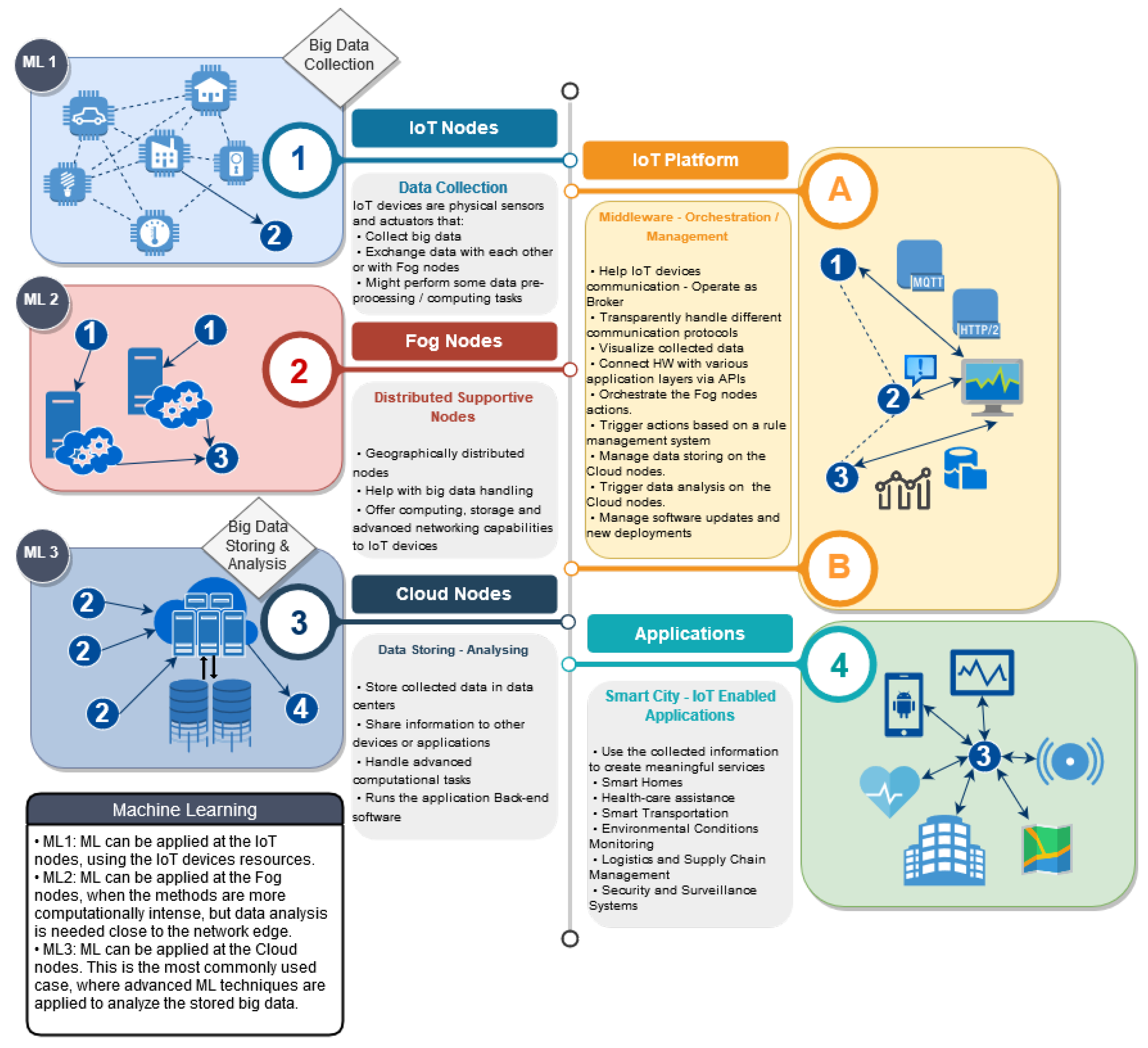
1.1. Internet of Things
- Smart Homes: This category includes traditional home devices, such as fridges, washing machines, or light bulbs, that have been developed and are able to communicate with each other or with authorized users via internet, offering a better monitoring and management of the devices as well as energy consumption optimization. Apart from the traditional devices, new technologies spread, providing smart home assistants, smart door locks, etc.
- Health-care assistance: New devices have been developed in order to improve a patient’s well-being. Plasters with wireless sensors can monitor a wound’s state and report the data to the doctor without the need for their physical presence. Other sensors in the form of wearable devices or small implants, can track and report a wide variety of measurements, such as heart rate, blood oxygen level, blood sugar level, or temperature.
- Smart Transportation: Using sensors embedded to the vehicles, or mobile devices and devices installed in the city, it is possible to offer optimized route suggestions, easy parking reservations, economic street lighting, telematics for public means of transportation, accident prevention, and autonomous driving.
- Environmental Conditions Monitoring: Wireless sensors distributed in the city make the perfect infrastructure for a wide variety of environmental conditions monitoring. Barometers, humidity sensors, or ultrasonic wind sensors can help to create advanced weather stations. Moreover, smart sensors can monitor the air quality and water pollution levels across the city.
- Logistics and Supply Chain Management: With the use of smart RFID tags, a product can be easily tracked from the production to the store, reducing cost and time significantly. In addition, smart packaging can offer features such as brand protection, quality assurance, and client personalization.
- Security and Surveillance Systems: Smart cameras can obtain video input across the streets. With real-time visual object recognition, smart security systems can identify suspects or prevent hazardous situations.
1.2. Machine Learning
- Supervised Learning: Supervised learning deals with problems involving regression such as weather forecasting, estimating life experience, and population growth prediction, by using algorithms like Linear Regression or Random Forest. Additionally, supervised learning addresses classification problems such as digit recognition, speech recognition, diagnostics, and identity fraud detection, by using algorithms such as Support Vector Machines, Nearest Neighbor, Random Forest, and others. There are two phases in supervised learning. The training phase and testing phase. The data sets used for the training phase need to have known labels. The algorithms learn the relationship between the input values and labels and try to predict the output values of the testing data [9].
- Unsupervised Learning: Unsupervised learning deals with problems involving dimensionality reduction used for big data visualisation, feature elicitation, or the discovery of hidden structures. Moreover, supervised learning is used for clustering problems such as recommendation systems, customer segmentation, and targeted marketing. Contrary to supervised learning, in this type, no labels are available. Algorithms in this category try to identify patterns on testing data and cluster the data or predict future values [9].
- Semi-supervised Learning: This is a combination of the previous two categories. Both labeled data and unlabeled data are used. It works mostly like the unsupervised learning with the improvements that a portion of labeled data can bring [8].
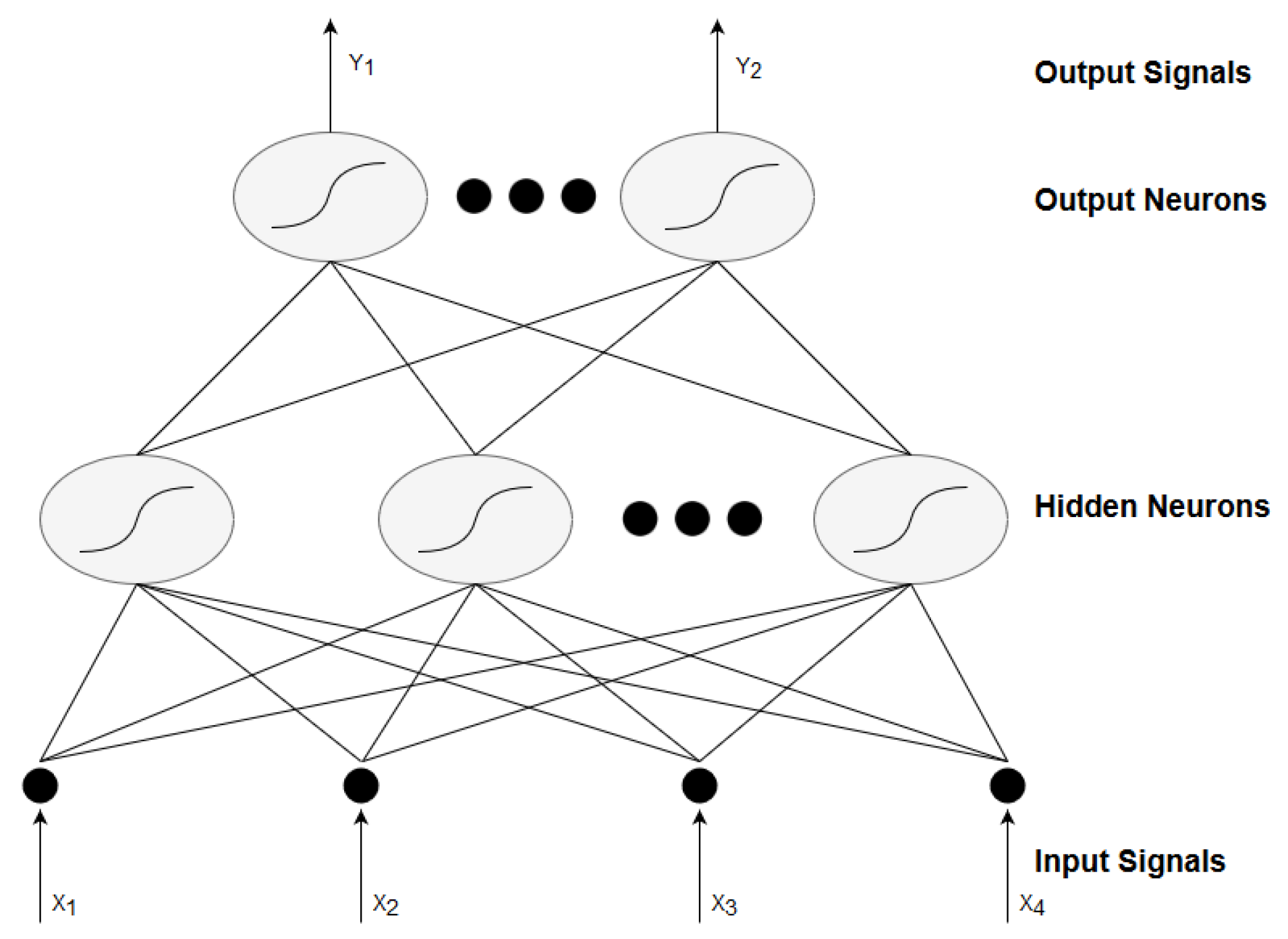
- Reinforcement Learning: In this learning style, the algorithms try to predict the output for a problem based on a set of tuning parameters. Then, the calculated output becomes an input parameter and new output is calculated until the optimal output is found. Artificial Neural Networks (ANN) and Deep Learning, which will be presented later, use this learning style. Reinforcement learning is mainly used for applications like AI gaming, skill acquisition, robot navigation, and real-time decisions. [9].
1.3. Machine Learning in IoT
1.4. Smart Transportation
2. Machine Learning and IoT in Smart Transportation
2.1. Machine Learning Algorithms
2.1.1. Ensemble
2.1.2. Bayesian
2.1.3. Markov Models
2.1.4. Decision Trees
2.1.5. Clustering
2.1.6. Artificial Neural Networks
2.1.7. Deep Learning
2.1.8. Instance Based
2.1.9. Regression Analysis
2.1.10. Non-Probabilistic Linear Classification
2.2. ML and IoT Applications in Smart Transportation
2.2.1. Route Optimization
2.2.2. Parking
2.2.3. Lights
2.2.4. Accident Detection/Prevention
2.2.5. Road Anomalies Detection
2.2.6. Infrastructure
3. Discussion/Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AMQP | Advanced Message Queuing Protocol |
| API | Application Programming Interface |
| GIS | Geographic Information System |
| GNSS | Global Navigation Satellite System |
| GPRS | General Packet Radio Service |
| GPS | Global Positioning System |
| GPU | Graphics Processing Unit |
| GSM | Global System for Mobile communications |
| HAAR | Human Automated Activity Recognition |
| HD | High Definition |
| HTTP | HyperText Transfer Protocol |
| IR | Infra-Red |
| LTE | Long Term Evolution |
| MQTT | Message Queuing Telemetry Transport |
| NB-IoT | Narrow Band-IoT |
| RFID | Radio Frequency IDentification |
| STOMP | Streaming Text Oriented Messaging Protocol |
| XMPP | Extensible Messaging and Presence Protocol |
References
- Swan, M. Sensor mania! the internet of things, wearable computing, objective metrics, and the quantified self 2.0. J. Sens. Actuator Netw. 2012, 1, 217–253. [Google Scholar] [CrossRef]
- Vangelista, L.; Zanella, A.; Zorzi, M. Long-range IoT technologies: The dawn of LoRa™. In Future Access Enablers of Ubiquitous and Intelligent Infrastructures; Springer: Cham, Switzerland, 2015; pp. 51–58. [Google Scholar]
- Hashem, I.A.T.; Chang, V.; Anuar, N.B.; Adewole, K.; Yaqoob, I.; Gani, A.; Ahmed, E.; Chiroma, H. The role of big data in smart city. Int. J. Inf. Manag. 2016, 36, 748–758. [Google Scholar] [CrossRef]
- Naik, N. Choice of effective messaging protocols for IoT systems: MQTT, CoAP, AMQP and HTTP. In Proceedings of the 2017 IEEE international systems engineering symposium (ISSE), Vienna, Austria, 11–13 October 2017; pp. 1–7. [Google Scholar]
- Satyanarayanan, M. The emergence of edge computing. Computer 2017, 50, 30–39. [Google Scholar] [CrossRef]
- Luan, T.H.; Gao, L.; Li, Z.; Xiang, Y.; Wei, G.; Sun, L. Fog computing: Focusing on mobile users at the edge. arXiv 2015, arXiv:1502.01815. [Google Scholar]
- Talari, S.; Shafie-Khah, M.; Siano, P.; Loia, V.; Tommasetti, A.; Catalão, J. A review of smart cities based on the internet of things concept. Energies 2017, 10, 421. [Google Scholar] [CrossRef]
- Mohammed, M.; Khan, M.B.; Bashier, E.B.M. Machine Learning: Algorithms and Applications; Crc Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Kubat, M. An Introduction to Machine Learning; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Wu, Q.; Ding, G.; Xu, Y.; Feng, S.; Du, Z.; Wang, J.; Long, K. Cognitive internet of things: A new paradigm beyond connection. IEEE Internet Things J. 2014, 1, 129–143. [Google Scholar] [CrossRef]
- Madden, S. From databases to big data. IEEE Internet Comput. 2012, 16, 4–6. [Google Scholar] [CrossRef]
- Yang, J.; Han, Y.; Wang, Y.; Jiang, B.; Lv, Z.; Song, H. Optimization of real-time traffic network assignment based on IoT data using DBN and clustering model in smart city. Future Gen. Comput. Syst. 2017, in press. [Google Scholar]
- Al-Dweik, A.; Muresan, R.; Mayhew, M.; Lieberman, M. IoT-based multifunctional scalable real-time enhanced road side unit for intelligent transportation systems. In Proceedings of the 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–6. [Google Scholar]
- Wu, Q.; Huang, C.; Wang, S.Y.; Chiu, W.C.; Chen, T. Robust Parking Space Detection Considering Inter-Space Correlation. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007. [Google Scholar]
- Araújo, A.; Kalebe, R.; Girão, G.; Filho, I.; Gonçalves, K.; Melo, A.; Neto, B. IoT-Based Smart Parking for Smart Cities. In Proceedings of the 2017 IEEE First Summer School on Smart Cities (S3C), Natal, Brazil, 6–11 August 2017; pp. 31–36. [Google Scholar]
- Jain, B.; Brar, G.; Malhotra, J.; Rani, S.; Ahmed, S.H. A cross layer protocol for traffic management in Social Internet of Vehicles. Future Gen. Comput. Syst. 2018, 82, 707–714. [Google Scholar] [CrossRef]
- Ghosh, A.; Chatterjee, T.; Samanta, S.; Aich, J.; Roy, S. Distracted Driving: A Novel Approach towards Accident Prevention. Adv. Comput. Sci. Technol. 2017, 10, 2693–2705. [Google Scholar]
- Fusco, G.; Colombaroni, C.; Comelli, L.; Isaenko, N. Short-term traffic predictions on large urban traffic networks: Applications of network-based machine learning models and dynamic traffic assignment models. In Proceedings of the 2015 IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 93–101. [Google Scholar]
- Kwon, D.; Park, S.; Baek, S.; Malaiya, R.K.; Yoon, G.; Ryu, J.T. A study on development of the blind spot detection system for the IoT-based smart connected car. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; pp. 1–4. [Google Scholar]
- Amato, G.; Carrara, F.; Falchi, F.; Gennaro, C.; Meghini, C.; Vairo, C. Deep learning for decentralized parking lot occupancy detection. Expert Syst. Appl. 2017, 72, 327–334. [Google Scholar] [CrossRef]
- Gopalakrishnan, K. Deep Learning in Data-Driven Pavement Image Analysis and Automated Distress Detection: A Review. Data 2018, 3, 28. [Google Scholar] [CrossRef]
- Liu, W.; Kim, S.W.; Marczuk, K.; Ang, M.H. Vehicle motion intention reasoning using cooperative perception on urban road. In Proceedings of the 2014 IEEE 17th International Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 424–430. [Google Scholar]
- Devi, S.; Neetha, T. Machine Learning based traffic congestion prediction in a IoT based Smart City. Int. Res. J. Eng. Technol. 2017, 4, 3442–3445. [Google Scholar]
- Munoz-Organero, M.; Ruiz-Blaquez, R.; Sánchez-Fernández, L. Automatic detection of traffic lights, street crossings and urban roundabouts combining outlier detection and deep learning classification techniques based on GPS traces while driving. Comput. Environ. Urban Syst. 2018, 68, 1–8. [Google Scholar] [CrossRef]
- Ba, J.; Mnih, V.; Kavukcuoglu, K. Multiple object recognition with visual attention. arXiv 2014, arXiv:1412.7755. [Google Scholar]
- Kanoh, H.; Furukawa, T.; Tsukahara, S.; Hara, K.; Nishi, H.; Kurokawa, H. Short-term traffic prediction using fuzzy c-means and cellular automata in a wide-area road network. In Proceedings of the 2005 IEEE Intelligent Transportation Systems, Vienna, Austria, 16 September 2005; pp. 381–385. [Google Scholar]
- Hou, Y.; Edara, P.; Sun, C. Traffic flow forecasting for urban work zones. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1761–1770. [Google Scholar] [CrossRef]
- Yu, J.; Chang, G.L.; Ho, H.; Liu, Y. Variation based online travel time prediction using clustered neural networks. In Proceedings of the 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 85–90. [Google Scholar]
- Ozbayoglu, M.; Kucukayan, G.; Dogdu, E. A real-time autonomous highway accident detection model based on big data processing and computational intelligence. In Proceedings of the 2016 IEEE International Conference on Big Data (Big Data), Washington, DC, USA, 5–8 December 2016; pp. 1807–1813. [Google Scholar]
- Kulkarni, A.; Mhalgi, N.; Gurnani, S.; Giri, N. Pothole detection system using machine learning on Android. Int. J. Emerg. Technol. Adv. Eng. 2014, 4, 360–364. [Google Scholar]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.Y. Traffic Flow Prediction With Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2014, 16, 865–873. [Google Scholar] [CrossRef]
- Ryder, B.; Wortmann, F. Autonomously detecting and classifying traffic accident hotspots. In Proceedings of the 2017 ACM International Joint Conference on Pervasive and Ubiquitous Computing and 2017 ACM International Symposium on Wearable Computers, Maui, HI, USA, 11–15 September 2017; pp. 365–370. [Google Scholar]
- Al Mamun, M.A.; Puspo, J.A.; Das, A.K. An intelligent smartphone based approach using IoT for ensuring safe driving. In Proceedings of the 2017 IEEE International Conference on Electrical Engineering and Computer Science (ICECOS), Palembang, Indonesia, 22–23 August 2017; pp. 217–223. [Google Scholar]
- Ghadge, M.; Pandey, D.; Kalbande, D. Machine learning approach for predicting bumps on road. In Proceedings of the 2015 IEEE International Conference on Applied and Theoretical Computing and Communication Technology (iCATccT), Davangere, India, 29–31 October 2015; pp. 481–485. [Google Scholar]
- Ng, J.R.; Wong, J.S.; Goh, V.T.; Yap, W.J.; Yap, T.T.V.; Ng, H. Identification of Road Surface Conditions using IoT Sensors and Machine Learning. In Computational Science and Technology; Springer: Singapore, 2019; pp. 259–268. [Google Scholar]
- Sang, K.S.; Zhou, B.; Yang, P.; Yang, Z. Study of Group Route Optimization for IoT Enabled Urban Transportation Network. In Proceedings of the 2017 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Exeter, UK, 21–23 June 2017; pp. 888–893. [Google Scholar]
- Dogru, N.; Subasi, A. Traffic accident detection using random forest classifier. In Proceedings of the 2018 15th Learning and Technology Conference (L&T), Jeddah, Saudi Arabia, 25–26 February 2018; pp. 40–45. [Google Scholar]
- Almeida, P.R.D.; Oliveira, L.S.; Britto, A.S.; Silva, E.J.; Koerich, A.L. PKLot—A robust dataset for parking lot classification. Expert Syst. Appl. 2015, 42, 4937–4949. [Google Scholar] [CrossRef]
- Zhou, Z.H. Ensemble Methods: Foundations and Algorithms; Chapman and Hall/CRC: Boca Raton, FL, USA, 2012. [Google Scholar]
- Lienhart, R.; Maydt, J. An extended set of haar-like features for rapid object detection. In Proceedings of the International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002; Volume 1, p. I. [Google Scholar]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO–simulation of urban mobility: An overview. In Proceedings of the SIMUL 2011, The Third International Conference on Advances in System Simulation, ThinkMind, Barcelona, Spain, 23–28 October 2011. [Google Scholar]
- Friedman, N.; Geiger, D.; Goldszmidt, M. Bayesian network classifiers. Mach. Learn. 1997, 29, 131–137. [Google Scholar] [CrossRef]
- Rabiner, L.R. A tutorial on hidden Markov models and selected applications in speech recognition. In Readings in Speech Recognition; Elsevier: San Mateo, CA, USA, 1990; pp. 267–296. [Google Scholar]
- Watkins, C.J.; Dayan, P. Q-learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- Utgoff, P.E. Incremental induction of decision trees. Mach. Learn. 1989, 4, 161–186. [Google Scholar] [CrossRef]
- Jain, A.K.; Murty, M.N.; Flynn, P.J. Data clustering: A review. ACM Comput. Surv. (CSUR) 1999, 31, 264–323. [Google Scholar] [CrossRef]
- Jain, A.K. Data clustering: 50 years beyond K-means. Pattern Recognit. Lett. 2010, 31, 651–666. [Google Scholar] [CrossRef]
- Werbos, P.J. Backpropagation through time: What it does and how to do it. Proc. IEEE 1990, 78, 1550–1560. [Google Scholar] [CrossRef]
- El Naqa, I.; Murphy, M.J. What is machine learning? In Machine Learning in Radiation Oncology; Springer: Cham, Switzerland, 2015; pp. 3–11. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems (NIPS 2012), Stateline, NV, USA, 3–8 December 2012. [Google Scholar]
- Daniels, D.J. Ground penetrating radar. Encyclopedia RF Microw. Eng. 2005. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Liu, G.; Bao, H.; Han, B. A Stacked Autoencoder-Based Deep Neural Network for Achieving Gearbox Fault Diagnosis. Math. Probl. Eng. 2018, 2018, 5105709. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Aha, D.W.; Kibler, D.; Albert, M.K. Instance-based learning algorithms. Mach. Learn. 1991, 6, 37–66. [Google Scholar] [CrossRef]
- Gower, J.; Ross, G. Non-probabilistic Classification. In Advances in Data Science and Classification. Studies in Classification, Data Analysis, and Knowledge Organization; Springer: Berlin/Heidelberg, Germany, 1998; pp. 21–28. [Google Scholar] [CrossRef]
- Distefano, S.; Merlino, G.; Puliafito, A.; Cerotti, D.; Dautov, R. Crowdsourcing and Stigmergic Approaches for (Swarm) Intelligent Transportation Systems. In Proceedings of the International Conference on Human Centered Computing (HCC 2017), Kazan, Russia, 7–9 August 2017. [Google Scholar]
- Chang, I.C.; Tai, H.T.; Yeh, F.H.; Hsieh, D.L.; Chang, S.H. A VANET-Based A* Route Planning Algorithm for Travelling Time- and Energy-Efficient GPS Navigation App. Int. J. Distrib. Sens. Netw. 2013, 9, 794521. [Google Scholar] [CrossRef]
- Tafidis, P.; Teixeira, J.; Bahmankhah, B.; Macedo, E.; Coelho, M.C.; Bandeira, J. Exploring crowdsourcing information to predict traffic-related impacts. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017. [Google Scholar]
- Barth, D. The Bright Side of Sitting in Traffic: Crowdsourcing Road Congestion Data, 2009. Available online: https://googleblog.blogspot.com/2009/08/bright-side-of-sitting-in-traffic.html (accessed on 11 March 2019).
- Fan, X.; Liu, J.; Wang, Z.; Jiang, Y.; Liu, X. Crowdsourced Road Navigation: Concept, Design, and Implementation. IEEE Commun. Mag. 2017, 55, 126–128. [Google Scholar] [CrossRef]
- Saarika, P.; Sandhya, K.; Sudha, T. Smart transportation system using IoT. In Proceedings of the 2017 IEEE International Conference on Smart Technologies for Smart Nation (SmartTechCon), Bangalore, KA, India, 17–19 August 2017; pp. 1104–1107. [Google Scholar]
- Gupta, A.; Kulkarni, S.; Jathar, V.; Sharma, V.; Jain, N. Smart Car Parking Management System Using IoT. Am. J. Sci. Eng. Technol. 2017, 2, 112. [Google Scholar]
- Aydin, I.; Karakose, M.; Karakose, E. A navigation and reservation based smart parking platform using genetic optimization for smart cities. In Proceedings of the 2017 5th International Istanbul Smart Grid and Cities Congress and Fair (ICSG), Istanbul, Turkey, 19–21 April 2017; pp. 120–124. [Google Scholar]
- Shi, J.; Jin, L.; Li, J.; Fang, Z. A smart parking system based on NB-IoT and third-party payment platform. In Proceedings of the 2017 17th International Symposium on Communications and Information Technologies (ISCIT), Cairns, QLD, Australia, 25–27 September 2017; pp. 1–5. [Google Scholar]
- Rizvi, S.R.; Zehra, S.; Olariu, S. ASPIRE: An Agent-Oriented Smart Parking Recommendation System for Smart Cities. IEEE Intell. Transp. Syst. Mag. 2018. [Google Scholar] [CrossRef]
- Araujo, A.; Kalebe, R.; Girao, G.; Filho, I.; Goncalves, K.; Neto, B. Reliability analysis of an IoT-based smart parking application for smart cities. In Proceedings of the 2017 IEEE International Conference on Big Data (Big Data), Boston, MA, USA, 11–14 December 2017. [Google Scholar]
- Jia, G.; Han, G.; Li, A.; Du, J. SSL: Smart Street Lamp Based on Fog Computing for Smarter Cities. IEEE Trans. Ind. Inform. 2018, 14, 4995–5004. [Google Scholar] [CrossRef]
- Kokilavani, M.; Malathi, A. Smart street lighting system using IoT. Int. J. Adv. Res. Appl. Sci. Technol. 2017, 3, 8–11. [Google Scholar]
- Tripathy, A.K.; Mishra, A.K.; Das, T.K. Smart lighting: Intelligent and weather adaptive lighting in street lights using IOT. In Proceedings of the 2017 International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, India, 6–7 July 2017. [Google Scholar]
- Celesti, A.; Galletta, A.; Carnevale, L.; Fazio, M.; Ĺay-Ekuakille, A.; Villari, M. An IoT Cloud System for Traffic Monitoring and Vehicular Accidents Prevention Based on Mobile Sensor Data Processing. IEEE Sens. J. 2018, 18, 4795–4802. [Google Scholar] [CrossRef]
- Chowdhury, D.N.; Agarwal, N.; Laha, A.B.; Mukherjee, A. A Vehicle-to-Vehicle Communication System Using Iot Approach. In Proceedings of the 2018 IEEE Second International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 29–31 March 2018; pp. 915–919. [Google Scholar]
- Geetha, S.; Cicilia, D. IoT enabled intelligent bus transportation system. In Proceedings of the 2017 2nd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 19–20 October 2017. [Google Scholar]

{kind=link}
{kind=link}
| No | Algorithm | References | Algorithm Type | Learning Type |
|---|---|---|---|---|
| 1 | AdaBoost | [17] | Ensemble | Supervised |
| 2 | Bayesian Network Seasonal Autoregressive Integrated Moving Average (BN-SARIMA) | [18] | Bayesian | Supervised |
| 3 | Convolutional Neural Network (CNN) and Deep CNN-(DCNN) | [19,20,21] | Deep Learning | Reinforcement |
| 4 | Coupled Hidden Markov Model (CHMM) | [22] | Markov Model | Reinforcement |
| 5 | Decision Tree | [23] | Decision Trees | Supervised |
| 6 | Deep Belief Networks (DBN) | [12,24] | Deep Learning | Reinforcement |
| 7 | Deep Recurrent Attention Model (DRAM) | [25] | Recursive Neural Networks-Deep Learning | Reinforcement |
| 8 | Fuzzy C-Means (FCM) | [26] | Clustering | Unsupervised |
| 9 | Feed Forward Neural Networks (FF-NN) | [18,23,27,28,29,30] | Artificial Neural Networks | Supervised |
| 10 | Fully Connected Networks (FCN) | [20] | Deep Learning | Reinforcement |
| 11 | Stacked Auto Encoder (SAE) with Greedy Layer-wise training | [31] | Deep Learning | Reinforcement, Unsupervised |
| 12 | Inception Neural Networks | [32] | Deep Learning | Reinforcement |
| 13 | K-Means | [12,33,34] | Clustering | Unsupervised |
| 14 | k-Nearest Neighbor (k-NN) | [24,29,35] | Instance Based | Supervised |
| 15 | Logistic Regression | [23] | Regression | Supervised |
| 16 | Markov Decision Process (MDP) | [36] | Discrete Time Stochastic Control | Reinforcement |
| 17 | Markov Random Field (MRF) | [14] | Markov Model | Unsupervised |
| 18 | Nonlinear AutoRegressive eXogenous model (NARX) | [18] | Recursive Neural Networks-Deep Learning | Reinforcement |
| 19 | Q-Learning | [36] | Stochastic Control-Markov Model | Reinforcement |
| 20 | Random Forest (RF) | [23,27,34,35,37] | Ensemble | Supervised |
| 21 | Regression Tree | [27,29] | Decision Trees | Supervised |
| 22 | Support-Vector Machine (SVM) | [14,23,24,35,37,38] | non-probabilistic Linear Classification | Supervised |
| No | ITS Application | References-ML | References-No ML |
|---|---|---|---|
| 1 | Route Optimization-Navigation | [12,18,23,27,28,31,36] | [13,58,59,60,61,62] |
| 2 | Parking | [14,20,38] | [63,64,65,66,67,68] |
| 3 | Lights | [69,70,71] | |
| 4 | Accident Detection | [17,19,22,24,25,29,32,37] | [72] |
| 5 | Road Anomalies | [21,30,33,34,35] | |
| 6 | Infrastructure | [16,73,74] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zantalis, F.; Koulouras, G.; Karabetsos, S.; Kandris, D. A Review of Machine Learning and IoT in Smart Transportation. Future Internet 2019, 11, 94. https://doi.org/10.3390/fi11040094
Zantalis F, Koulouras G, Karabetsos S, Kandris D. A Review of Machine Learning and IoT in Smart Transportation. Future Internet. 2019; 11(4):94. https://doi.org/10.3390/fi11040094
Chicago/Turabian StyleZantalis, Fotios, Grigorios Koulouras, Sotiris Karabetsos, and Dionisis Kandris. 2019. "A Review of Machine Learning and IoT in Smart Transportation" Future Internet 11, no. 4: 94. https://doi.org/10.3390/fi11040094
APA StyleZantalis, F., Koulouras, G., Karabetsos, S., & Kandris, D. (2019). A Review of Machine Learning and IoT in Smart Transportation. Future Internet, 11(4), 94. https://doi.org/10.3390/fi11040094