
A Practical and Robust Execution Time-Frame Procedure for the Multi-Mode Resource-Constrained Project Scheduling Problem with Minimal and Maximal Time Lags

Abstract
:1. Introduction
2. Literature Review
2.1. The RCPSP and Its Variations
2.1.1. RCPSP
2.1.2. MRCPSP
2.1.3. MRCPSP/Max
2.2. Objectives Solved and Solution Procedures
2.3. Measuring Uncertainty
2.4. Schedule Robustness
3. Model and Methodology
3.1. Mathematical Formulation of MRCPSP/Max
3.2. Solution Procedure
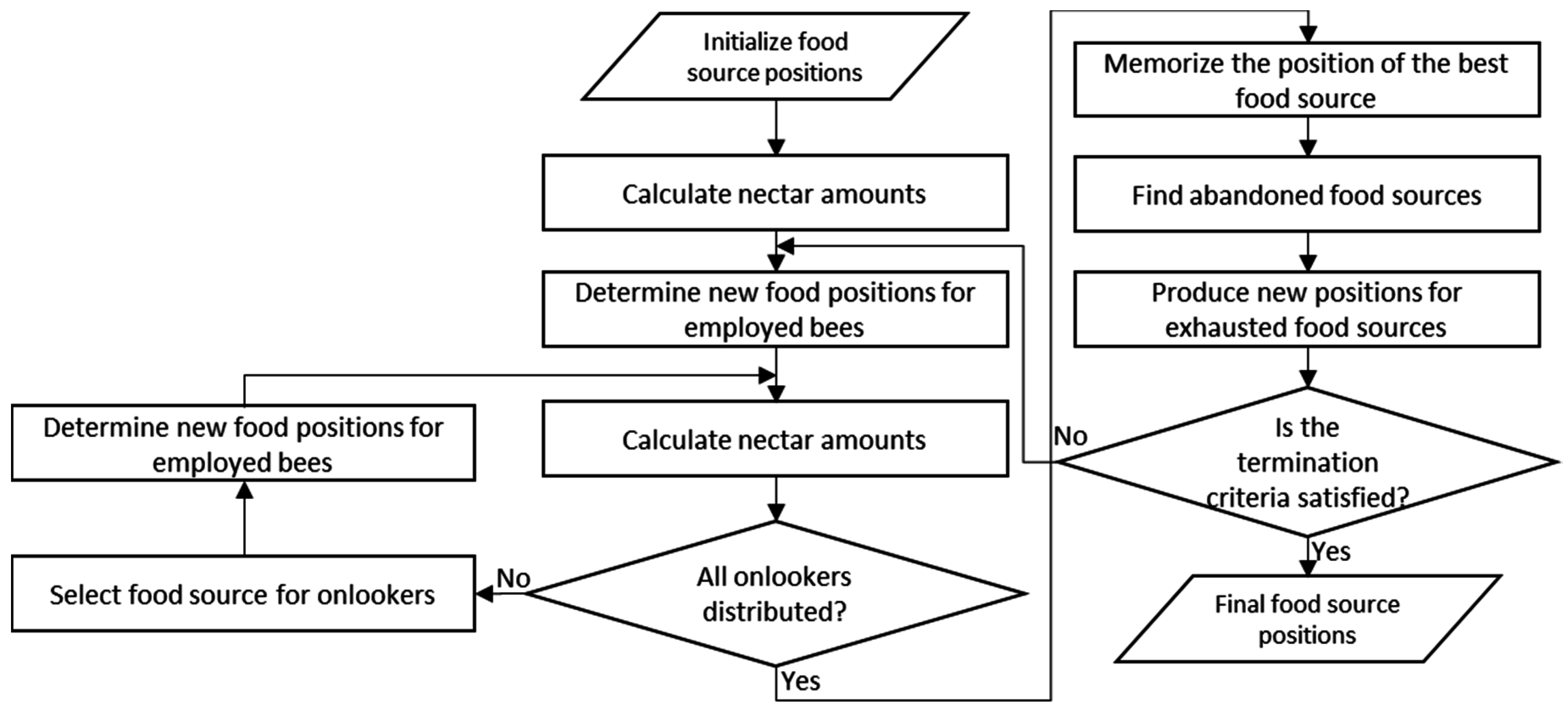
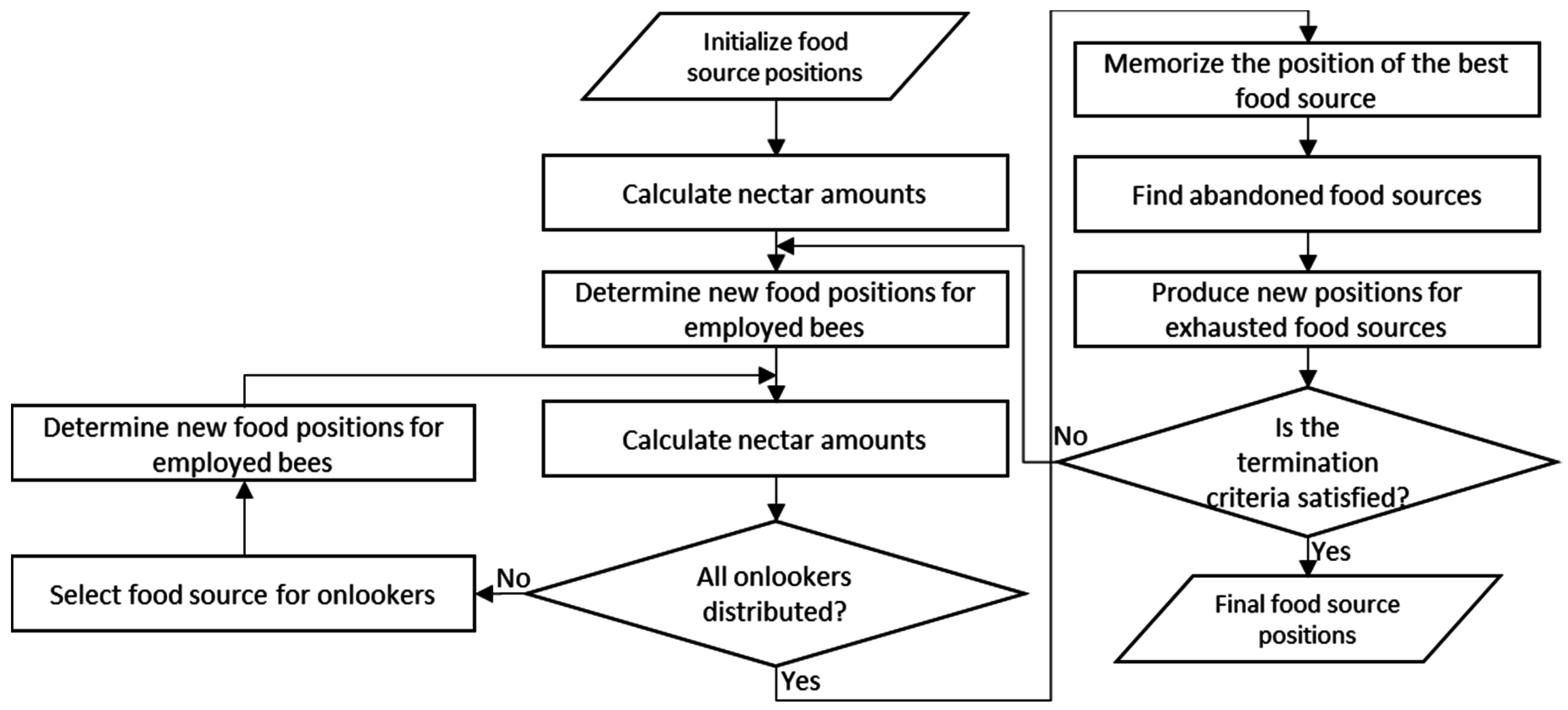
3.2.1. Discrete Artificial Bee Colony
- Initialization: n-dimensional solutions are generated randomly throughout the search space. After the initialization phase, the algorithm is repeated a Maximum Number of Cycles (MNC), executing three improvement phases in each cycle:
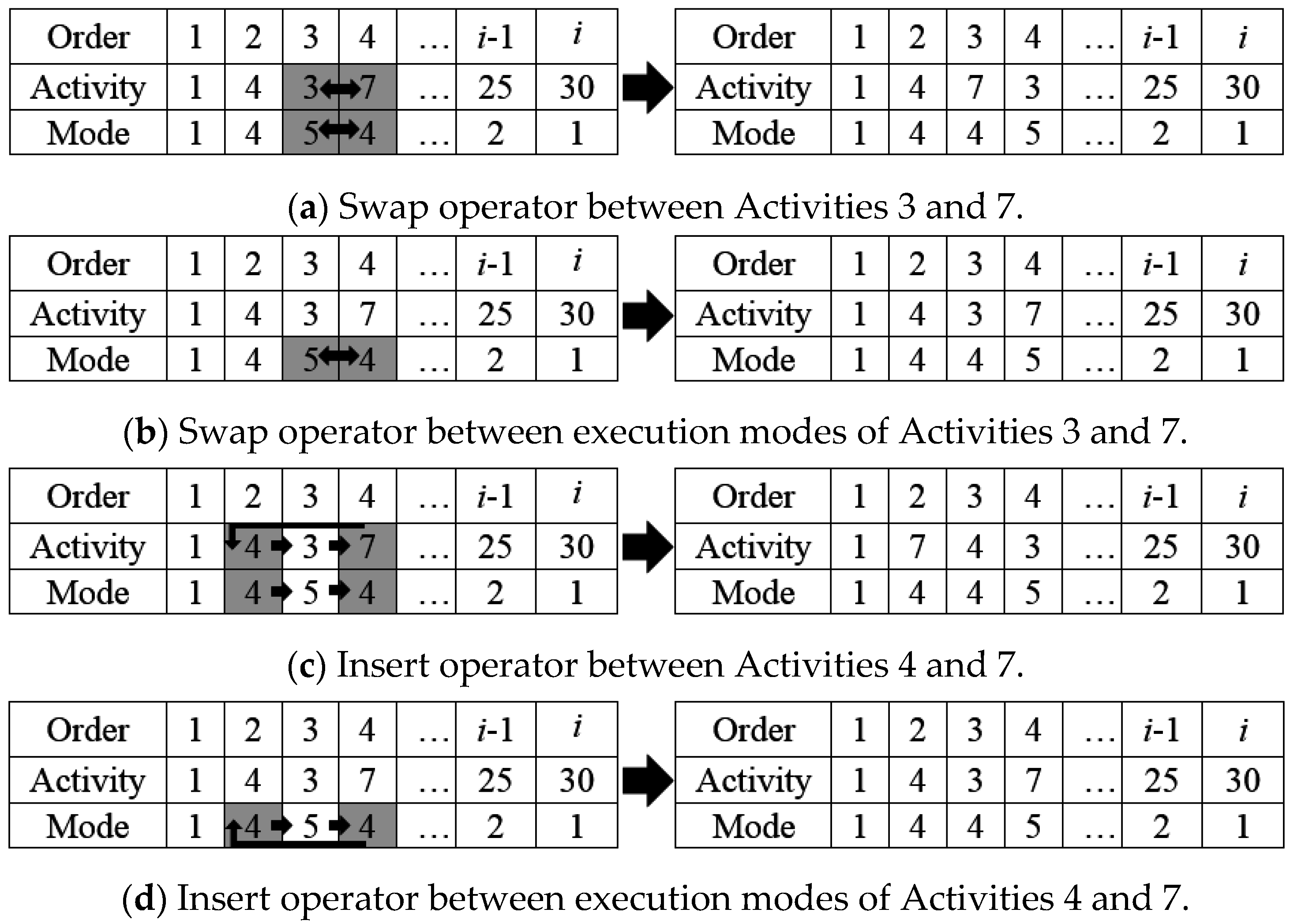
- Employed bees phase: Each solution (food source) is assigned a bee, which thus becomes an employed bee. This bee seeks to improve the solution by applying modifications (local search operators), and the quality (nectar) of the obtained solution is later compared to that of the original solution. If the modified solution is better, the old solution is forgotten, and the new solution is memorized. The employed bee will keep modifying the assigned food source until either a better solution is found or the abandonment limit is reached.
- Onlooker bees phase: After all employed bees have finished their local search cycle, they share the nectar information of their food sources with the onlookers, each of which then selects a food source for further exploration based on the following probability:The onlookers tend to choose a food source i with higher probability pi among SN total food sources, each with a fitness fi.
- Scout bees phase: If the employed and onlooker bees cannot improve a solution after a number of trials (i.e., they reach the abandonment limit), a scout bee searches for a new food source (i.e., a new solution is generated randomly), and the previous food source is abandoned.
3.2.2. Mode Selection Rules
3.2.3. Activity Priority Rules
3.2.4. Three-Stage Procedure Execution Time-Frame
| Algorithm 1: Repeat until all instances are solved |
| Stage 1: Minimize Makespan (Upper Bound Makespan, MS1) |
| Initialization Phase |
| While i < population |
| Evaluate Mode Selection Rules (MSR) |
| Evaluate Activity Priority Rules (APR) |
| End |
| Repeat until MNC |
| Employed Bees Phase |
| Onlooker Bees Phase |
| Scout Bees Phase |
| End |
| Stage 2: Compute schedule’s entropy (Upper Bound Makespan) |
| Stage 3: Maximize Robustness |
| Initialization Phase |
| While i < population |
| Evaluate Mode Selection Rules (MSR) |
| Evaluate Activity Priority Rules (APR) |
| End |
| Repeat until MNC |
| Employed Bees Phase |
| Onlooker Bees Phase |
| Scout Bees Phase |
| End |
| End |
Stage 1: Lower Bound Makespan
Stage 2: Upper Bound Makespan
Stage 3: Robust Makespan
4. Computational Results
4.1. Parameters
4.2. Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ABC | Artificial Bee Colony |
| ACOSS | Ant Colony Optimization and Scatter Search |
| ACTIM | Activity Time |
| ANGEL | Ant Colony and Genetic Algorithm with Local Search |
| APR | Activity Priority Rules |
| BKO | Best-Known Optima |
| BMAP | Best Mode Assignment Problem |
| CPM | Differential Evolution |
| DE | Differential Evolution |
| EDA | Estimation of Distribution Algorithm |
| EFTi | Earliest Finish Time of activity i |
| GCUMRD | Greatest Cumulative Resource Demand |
| LFTi | Latest Finish Time of activity i |
| LNRJ | Least Non-Related Jobs |
| LPSRD | Least Product Sum of Resource and Duration |
| LRP | Least Resource Proportion |
| LRS | Least sum of Non-renewable Resource |
| LTRU | Least Total Resource Usage |
| MIS | Most Immediate Successors |
| MNC | Maximum Number of Cycles |
| moEDA | Multi-Objective Estimation Distribution Algorithm |
| MRCPSP | Multi-mode Resource Constrained Project Scheduling Problem |
| MRCPSP/max | Multimode RCPSP with minimal and maximal time lags |
| MSi | Makespan of Stage i |
| MSR | Mode Selection Rules |
| MTS | Most Total Successors |
| NP-Hard | Non-deterministic polynomial time hard |
| NPV | Net Present Value |
| PERT | Program Evaluation and Review Technique |
| PSO | Particle Swarm Optimization |
| RCPCP | Resource Constrained Project Scheduling Problem |
| ROT | Resource Over Time |
| RSM | Resource Scheduling Method |
| SA | Simulated Annealing |
| SFLA | Shuffled Frog-Leaping Algorithm |
| SFM | Shortest Feasible Mode |
| SGS | Serial Generation Scheme |
| SLK | Minimum Slack First |
| TS | Tabu Search |
| WRUP | Weighted Resource Utilization Ratio and Precedence |
References
- Blazewicz, J.; Lenstra, J.K.; Kan, A.H.G. Scheduling subject to resource constraints: Classification and complexity. Discret. Appl. Math. 1983, 5, 11–24. [Google Scholar] [CrossRef]
- Kolisch, R. Project Scheduling under Resource Constraints—Efficient Heuristics for Several Problem Cases; Physica-Verlag: Heidelberg, Germany, 1995. [Google Scholar]
- Elmaghraby, S.E. Activity Networks: Project Planning and Control by Network Models; Wiley: New York, NY, USA, 1977. [Google Scholar]
- Erenguc, S.S.; Ahn, T.; Conway, D.G. The resource constrained project scheduling problem with multiple crashable modes: An exact solution method. Nav. Res. Logist. 2001, 48, 107–127. [Google Scholar] [CrossRef]
- Bellenguez, O.; Néron, E. Lower bounds for the multi-skill project scheduling problem with hierarchical levels of skills. Lect. Notes Comput. Sci. 2005, 3616, 229–243. [Google Scholar]
- Zhu, G.; Bard, J.F.; Yu, G. A branch-and-cut procedure for the multimode resource-constrained project-scheduling problem. INFORMS J. Comput. 2006, 18, 377–390. [Google Scholar] [CrossRef]
- Heilmann, R. Resource-constrained project scheduling: A heuristic for the multi-mode case. OR Spektrum 2001, 23, 335–357. [Google Scholar] [CrossRef]
- Heilmann, R. A branch-and-bound procedure for the multi-mode resource-constrained project scheduling problem with minimum and maximum time lags. Eur. J. Oper. Res. 2003, 144, 348–365. [Google Scholar] [CrossRef]
- Nonobe, K.; Ibaraki, T. A metaheuristic approach to the resource constrained project scheduling with variable activity durations and convex cost functions. In Perspectives in Modern Project Scheduling; Springer: New York, NY, USA, 2006; pp. 225–248. [Google Scholar]
- Sabzehparvar, M.; Seyed-Hosseini, S.M. A mathematical model for the multimode resource-constrained project scheduling problem with mode dependent time lags. J. Supercomput. 2008, 44, 257–273. [Google Scholar] [CrossRef]
- Kolisch, R.; Padman, R. An integrated survey of deterministic project scheduling. Omega 2001, 29, 249–272. [Google Scholar] [CrossRef]
- Kolisch, R. Integrated scheduling, assembly area- and part-assignment for large-scale, make-to-order assemblies. Int. J. Prod. Econ. 2000, 64, 127–141. [Google Scholar] [CrossRef]
- Möhring, R.H.; Schulz, A.S.; Stork, F.; Uetz, M. On project scheduling with irregular starting time costs. Oper. Res. Lett. 2001, 28, 149–154. [Google Scholar] [CrossRef]
- Möhring, R.H.; Schulz, S.A.; Stork, F.; Uetz, M. Solving project scheduling problems by minimum cut computations. Manag. Sci. 2003, 49, 330–350. [Google Scholar]
- Achuthan, N.; Hardjawidjaja, A. Project scheduling under time dependent costs—A branch and bound algorithm. Ann. Oper. Res. 2001, 108, 55–74. [Google Scholar] [CrossRef]
- Dodin, B.; Elimam, A.A. Integrated project scheduling and material planning with variable activity duration and rewards. IIE Trans. 2001, 33, 1005–1018. [Google Scholar] [CrossRef]
- Kimms, A. Maximizing the net present value of a project under resource constraints using a Lagrangian relaxation based heuristic with tight upper bounds. Ann. Oper. Res. 2001, 102, 221–236. [Google Scholar] [CrossRef]
- Padman, R.; Zhu, D. Knowledge integration using problem spaces: A study in resource-constrained project scheduling. J. Sched. 2006, 9, 133–152. [Google Scholar] [CrossRef]
- Ulusoy, G.; Cebelli, S. An equitable approach to the payment scheduling problem in project management. Eur. J. Oper. Res. 2000, 127, 262–278. [Google Scholar] [CrossRef]
- Vanhoucke, M.; Demeulemeester, E.L.; Herroelen, W.S. Maximizing the net present value of a project with linear time-dependent cash flows. Int. J. Prod. Res. 2001, 39, 3159–3181. [Google Scholar] [CrossRef]
- Dayanand, N.; Padman, R. Project contracts and payment schedules: The client’s problem. Manag. Sci. 2001, 47, 1654–1667. [Google Scholar] [CrossRef]
- Józefowska, J.; Mika, M.; Różycki, R.; Waligóra, G.; Węglarz, J. Simulated annealing for multi-mode resource-constrained project scheduling. Ann. Oper. Res. 2001, 102, 117–155. [Google Scholar] [CrossRef]
- Hartmann, S. A self-adapting genetic algorithm for project scheduling under resource constraints. Nav. Res. Logist. 2002, 49, 433–448. [Google Scholar] [CrossRef]
- Zhang, H.; Tam, C.M.; Li, H. Multimode project scheduling based on particle swarm optimization. Comput.-Aided Civ. Infrastruct. 2006, 21, 90–103. [Google Scholar] [CrossRef]
- Jarboui, B.; Damak, N.; Siarry, P.; Rebaic, A. A combinatorial particle swarm optimization for solving multi-mode resource-constrained project scheduling problems. Appl. Math. Comput. 2008, 95, 299–308. [Google Scholar] [CrossRef]
- Ranjbar, M.; de Reyck, B.; Kianfar, F. A hybrid scatter search for the discrete time/resource trade-off problem in project scheduling. Eur. J. Oper. Res. 2009, 193, 35–48. [Google Scholar] [CrossRef]
- Shi, Y.J.; Chen, W.; Teng, H.; Lan, X.; Hu, L. An efficient hybrid algorithm for resource-constrained project scheduling. Inf. Sci. 2010, 180, 1031–1039. [Google Scholar]
- Carazo, A.F.; Gómez, T.; Molina, J.; Hernández-Díaz, A.G.; Guerrero, F.M.; Caballero, R. Solving a comprehensive model for multi-objective project portfolio selection. Comput. Oper. Res. 2010, 37, 630–639. [Google Scholar] [CrossRef]
- Agarwal, A.; Colak, S.; Erenguc, S. A neurogenetic approach for the resource-constrained project scheduling problem. Comput. Oper. Res. 2011, 38, 44–50. [Google Scholar] [CrossRef]
- Chen, S. Application of the Metaheuristic ANGEL in Solving Multiple Projects Resource-Contraines Project Scheduling Problem with Total Tardy Cost. In Proceedings of the 2014 7th International Conference on Ubi-Media Computing and Workshops, Ulaanbaatar, Mongolia, 12–14 July 2014; pp. 43–46.
- Damak, N.; Jarboui, P.; Siarry, T. Loukila Differential evolution for solving multimode resource-constrained project scheduling problems. Comput. Oper. Res. 2009, 205, 2653–2659. [Google Scholar] [CrossRef]
- Van Petegehm, V.; Vanhoucke, M. An artificial immune system for the multimode resource-constrained project scheduling problem. Lect. Notes Comput. Sci. 2009, 5482, 85–96. [Google Scholar]
- Wang, L.; Fang, C. An effective estimation of distribution algorithm for the multimode resource constrained project scheduling problem. Comput. Oper. Res. 2012, 39, 449–460. [Google Scholar] [CrossRef]
- Fang, C.; Wang, L. An effective shuffled frog-leaping algorithm for resource-constrained project scheduling problem. Comput. Oper. Res. 2012, 39, 890–901. [Google Scholar] [CrossRef]
- Soliman, O.S.; Elgendi, E. A hybrid estimation of distribution algorithm with random walk local search for multi-mode resource-constrained project scheduling problems. Int. J. Comput. Trends Technol. 2014, 8, 57–64. [Google Scholar] [CrossRef]
- Chen, A.H.L.; Liang, Y.C.; Padilla, J.D. An Entropy-Based Upper Bound Methodology for Robust Predictive Multi-Mode RCPSP Schedules. Entropy 2014, 16, 5032–5067. [Google Scholar] [CrossRef]
- Bibiks, K.; Hu, F.; Li, J.; Smith, A. Discrete Cuckoo Search for Resource Constrained Project Scheduling Problem. In Proceedings of the 2015 IEEE 18th International Conference on Computational Science and Engineering, Porto, Portugal, 21–23 October 2015; pp. 240–245.
- Long, L.D.; Ohsato, A. Fuzzy critical chain method for project scheduling under resource constraints and uncertainty. Int. J. Proj. Manag. 2008, 26, 688–698. [Google Scholar] [CrossRef]
- Chen, W.M.; Xiao, R.; Lu, H. A chaotic PSO approach to multi-mode resource-constraint project scheduling with uncertainty. Int. J. Comput. Sci. Eng. 2011, 6, 5–15. [Google Scholar] [CrossRef]
- Xu, J.; Ma, Y.; Zehui, X. A Bilevel Model for Project Scheduling in a Fuzzy Random Environment. IEEE Trans. Syst. Man Cybern. 2015, 45, 1322–1335. [Google Scholar] [CrossRef]
- Rabbani, M.; Ghomi, S.M.T.F.; Jolai, F.; Lahiji, N.S. A new heuristic for resource-constrained project scheduling in stochastic networks using critical chain concept. Eur. J. Oper. Res. 2006, 176, 794–808. [Google Scholar] [CrossRef]
- Larrañaga, P.; Lozano, J.A. Estimation of Distribution Algorithms: A New Tool for Evolutionary Computation; Genetic Algorithms and Evolutionary Computation Series; Kluwer Academic Publishers: Boston, MA, USA, 2002. [Google Scholar]
- Hao, X.; Lin, L.; Gen, M. An effective multi-objective EDA for robust resource constrained project scheduling with uncertain durations. Procedia Comput. Sci. 2014, 36, 571–578. [Google Scholar] [CrossRef]
- Bushuyev, S.; Sochnev, S. Entropy measurement as a project control tool. Int. J. Proj. Manag. 1999, 17, 343–350. [Google Scholar] [CrossRef]
- Al-Fawzan, M.A.; Haouari, M. A bi-objective model for robust resource-constrained project scheduling. Int. J. Prod. Econ. 2005, 96, 175–187. [Google Scholar] [CrossRef]
- Chtourou, H.; Haouari, M. A two stage priority rule based algorithm for robust resource constrained project scheduling. Comput. Ind. Eng. 2008, 55, 183–194. [Google Scholar] [CrossRef]
- Barrios, A.; Ballestin, F.; Valls, V. A double genetic algorithm for the MRCPSP/max. Comput. Oper. Res. 2011, 38, 33–43. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Erciyes University: Erciyes, Turkey, 2005. [Google Scholar]
- Boctor, F.F. Heuristics for Scheduling Projects with Resource Restrictions and Several Resource-Duration Modes. Int. J. Prod. Res. 1993, 31, 2547–2558. [Google Scholar] [CrossRef]
- Chen, A.H.L.; Chyu, C.C. A Memetic Algorithm for Maximizing Net Present Value in Resource-Constrained Project Scheduling Problem. In Proceedings of the 2008 IEEE Congress on Evolutionary Computation, Hong Kong, China, 1–6 June 2008.
- Brooks, G.H.; White, C.R. An algorithm for finding optimal or near-optimal solutions to the production scheduling problem. J. Ind. Eng. 1965, 16, 34–40. [Google Scholar]
- Demeulemeester, E.L.; Herroelen, W.S. Project Scheduling: A Research Handbook; Springer: New York, NY, USA, 2006; Volume 49. [Google Scholar]
- Alvarez-Valdés, R.; Tamarit, J.M. Heuristic Algorithms for Resource-Constrained Project Scheduling: A Review and Empirical Analysis. In Advances in Project Scheduling; Slowinski, R.A.J.W., Ed.; Elsevier: Amsterdam, The Netherlands, 1989; pp. 113–134. [Google Scholar]
- Elsayed, E.A. Algorithms for Project Scheduling with Resource Constraints. Int. J. Prod. Res. 1982, 20, 95–103. [Google Scholar] [CrossRef]
- Ulusoy, G.; Özdamar, L. Heuristic performance and network/resource characteristics in resource constrained projects scheduling. J. Oper. Res. Soc. 1989, 40, 1145–1152. [Google Scholar] [CrossRef]
- Davis, E.W.; Patterson, J.H. A comparison of heuristic and optimum solutions in resource constrained project scheduling. Manag. Sci. 1975, 21, 944–955. [Google Scholar] [CrossRef]
- Brand, J.D.; Meyer, W.L.; Shaffer, L.R. The Resource Scheduling Problem in Construction; University of Illinois: Urbana, IL, USA, 1964. [Google Scholar]
- IfW: Multi Mode Project Duration Problem MRCPSP/Max. Available online: http://www.wiwi.tu-clausthal.de/en/chairs/produktion/research/research-areas/project-generator/mrcpsp5max/ (accessed on 21 September 2016).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
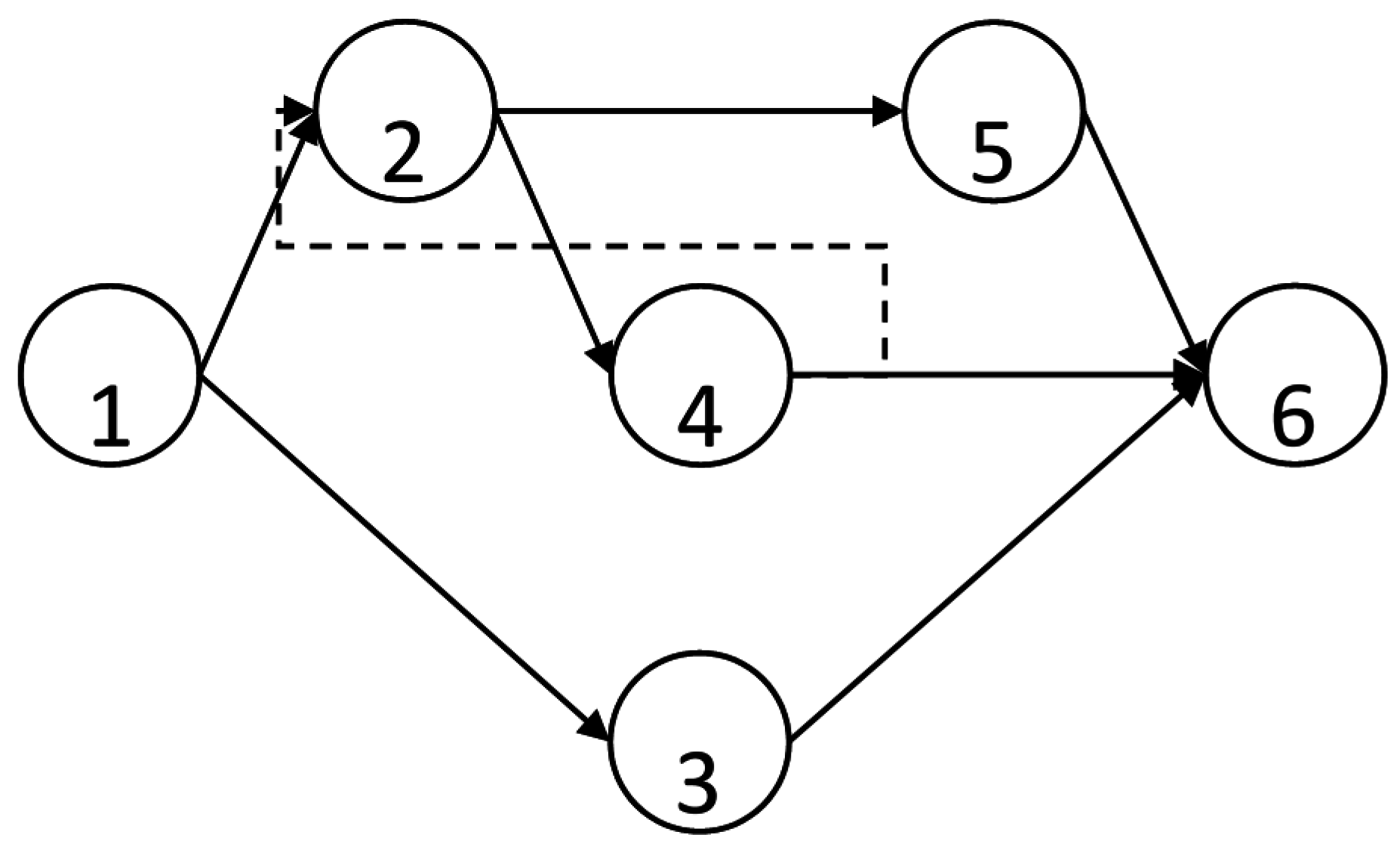
| Activity (i) | Modes (i) | Duration (dil;di;diu) | Arc Weights (δ) | |
|---|---|---|---|---|
| 1 | 1 | - | - | (5,3,1); (4,5,5) |
| 2 | 1 | 3;3;4 | 2 | (4,1,4); (1,1,7) |
| 2 | 2;3;4 | 3 | (2,1,4); (1,6,3) | |
| 3 | 1;1;2 | 4 | (−1,2,0); (2,3,7) | |
| 3 | 1 | 2;3;5 | 1 | (5) |
| 2 | 2;2;2 | 3 | (1) | |
| 3 | 1;3;5 | 5 | (4) | |
| 4 | 1 | 3;3;4 | 3 | (1,4,9); (3) |
| 2 | 2;3;4 | 3 | (7,3,2); (1) | |
| 3 | 1;2;3 | 4 | (1,2,4); (2) | |
| 5 | 1 | 2;3;3 | 4 | (1) |
| 2 | 3;3;4 | 5 | (2) | |
| 3 | 1;2;2 | 7 | (3) | |
| 6 | 1 | - | - | - |
| Priority Rule | Description |
|---|---|
| SFM (Shortest Feasible Mode) | Find the feasible mode combination for which the makespan is minimal |
| LRP (Least Resource Proportion) | Choose the mode that leads to the smallest value of the criterion, max() |
| LPSRD (Least Product Sum of Resource and Duration) | For each activity, choose the execution mode that has the minimum product sum of non-renewable resource usage and its corresponding mode duration, |
| LTRU (Least Total Resource Usage) | Choose the execution mode that requires the least total non-renewable usage, |
| LRS (Least sum of Non-renewable Resource) | Choose the execution mode that requires the least sum of the ratio of the non-renewable consumption to its corresponding resource limitation, |
| Priority Rule | References | Description |
|---|---|---|
| max ACTIM | [51] | CPM − LSTi |
| max GCUMRD | [52] | The sum of the renewable resource demand of the activity considered and the renewable resource demands of all its immediate successors |
| max MTS | [53] | the total number of successors for activity i |
| max MIS | [53] | the number of immediate successors for activity i |
| max ROT | [54] | sum of the ratio of the renewable resource requirement over the resource availability divided by the activity duration for activity i |
| max WRUP | [55] | , a weighted sum of the number of immediate successors and an average resource use over all renewable resource types |
| min EFT | [56] | EFTi |
| min LFT | [56] | LFTi |
| min SLK | [56] | LFTi − EFTi |
| min LNRJ | [52] | the total number of activities that are not precedence related with activity i |
| min RSM | [57] | dij = max[0, (EFTi − LSTj)] |
| Parameter | Value |
|---|---|
| Population size | 30 |
| Abandonment limit | 5 |
| MNC | 20 |
| δt (relevant time interval) | 1 |
| frac | 0.25 |
| Benchmark Set | MM30 | MM50 | MM100 | Overall Average | |
|---|---|---|---|---|---|
| Optima Found | 260 | 123 | 84 | ||
| Stage 1 | Avg. Dev. vs. BKO | 0.18% | 4.57% | 4.42% | 3.06% |
| Stage 2 | Avg. Dev. vs. BKO | 9.69% | 10.13% | 8.50% | 9.44% |
| Avg. Dev. vs. S1 | 6.02% | 5.84% | 4.27% | 5.38% | |
| Stage 3 | Avg. Dev. vs. BKO | 5.04% | 5.39% | 4.37% | 4.93% |
| Avg. Dev. vs. S1 | 1.10% | 0.79% | −0.12% | 0.59% | |
| Avg. Dev. vs. S2 | −5.36% | −5.48% | −4.62% | −5.16% |
| H0: µBKO = µS1 |
| H1: µBKO < µS1 |
| H0: µBKO = µS2 |
| H1: µBKO < µS2 |
| H0: µBKO = µS3 |
| H1: µBKO < µS3 |
| Benchmark Set | p-Value | ||
|---|---|---|---|
| Stage 1 | Stage 2 | Stage 3 | |
| MM30 | 0.067 | 0.000 | 0.024 |
| MM50 | 0.057 | 0.000 | 0.029 |
| MM100 | 0.049 | 0.000 | 0.047 |
| H0: µS1 = µS2 |
| H1: µS1 < µS2 |
| H0: µS1 = µS3 |
| H1: µS1 < µS3 |
| Benchmark Set | p-Value | |
|---|---|---|
| Stage 2 | Stage 3 | |
| MM30 | 0.008 | 0.318 |
| MM50 | 0.015 | 0.379 |
| MM100 | 0.047 | 0.488 |
| H0: Avg. Dev.S2 − Avg. Dev.S1 = 5% |
| H1: Avg. Dev.S2 − Avg. Dev.S1 > 5% |
| Benchmark Set | p-Value |
|---|---|
| MM30 | 1 |
| MM50 | 1 |
| MM100 | 1 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, A.H.-L.; Liang, Y.-C.; Padilla, J.D. A Practical and Robust Execution Time-Frame Procedure for the Multi-Mode Resource-Constrained Project Scheduling Problem with Minimal and Maximal Time Lags. Algorithms 2016, 9, 63. https://doi.org/10.3390/a9040063
Chen AH-L, Liang Y-C, Padilla JD. A Practical and Robust Execution Time-Frame Procedure for the Multi-Mode Resource-Constrained Project Scheduling Problem with Minimal and Maximal Time Lags. Algorithms. 2016; 9(4):63. https://doi.org/10.3390/a9040063
Chicago/Turabian StyleChen, Angela Hsiang-Ling, Yun-Chia Liang, and Jose David Padilla. 2016. "A Practical and Robust Execution Time-Frame Procedure for the Multi-Mode Resource-Constrained Project Scheduling Problem with Minimal and Maximal Time Lags" Algorithms 9, no. 4: 63. https://doi.org/10.3390/a9040063
APA StyleChen, A. H.-L., Liang, Y.-C., & Padilla, J. D. (2016). A Practical and Robust Execution Time-Frame Procedure for the Multi-Mode Resource-Constrained Project Scheduling Problem with Minimal and Maximal Time Lags. Algorithms, 9(4), 63. https://doi.org/10.3390/a9040063