

Algorithms for Calculating Generalized Trigonometric Functions


{kind=link}
Abstract
1. Introduction
2. State of the Art
3. Definitions and Properties of Ateb-Functions
4. Methods for Implementing Calculations of Hyperbolic Ateb-Functions
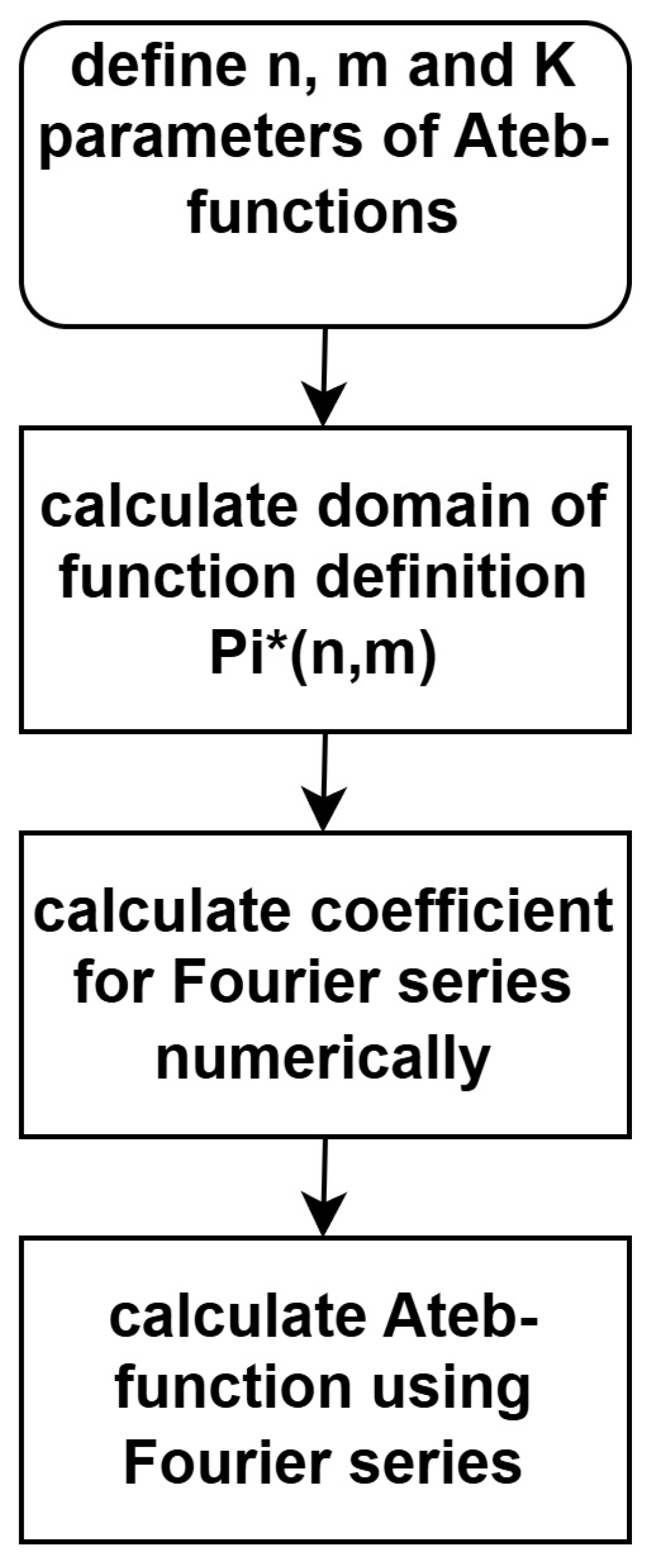
- Define parameters , and K-count of elements in Fourier series;
- Calculate interval according to Formula (23);
- Define step h for numerical calculation integrals and calculate coefficients of Fourier series according to Formula (27);
- Calculate according to Formula (24).
- Define parameters , and K-count of elements in Fourier series (this step is the same as for hyperbolic sine);
- Calculate interval according to Formula (23) (this step is also realized for hyperbolic sine);
- Define step h for numerical calculation integrals for coefficients of Fourier series according to Formula (25);
- Calculate according to Formula (26).
5. Algorithms for Calculation Space Transform Based on Ateb-Functions
5.1. Orthogonal Trigonometric Transforms for Hyperbolic Ateb-Functions
5.2. Orthogonal Ateb-Transform with One Parameter
5.3. Orthogonal Ateb-Transform with Two Parameters
5.4. Method for Calculating Ateb-Transforms
- Define parameters n and m of Ateb-transform and function , the spectrum of which we will calculate;
- Control the periodic conditions;
- Calculate the period ;
- For current point w from the interval , calculate the values for and , then calculate and , and then calculate Ateb-transform according to Formula (36).
6. Construction of Discrete Ateb-Transforms
6.1. One-Dimensional Discrete Ateb-Transform
6.2. Algorithms for Calculation of Discrete Ateb-Transform
- Define parameters m and n;
- Control periodic condition;
- Define dimension of discrete signal N;
- Define two N-dimensional arrays S for input signal and X for output signal;
- Calculate period of function. Define other index k = 0 as array index.
- Define the sums for calculation coefficients and and current index for sum .
- Calculate elements and as current elements for summarizing;
- Calculate
- Calculate
- If , then else go to step 6;
- If , then output array X.
7. Generalization of Hyperbolic Ateb-Functions to the Quantum Calculus
8. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DAT | Discrete Ateb-transform |
| OAT | Orthogonal Ateb-transform |
References
- Kowalenko, V. Algorithms for Various Trigonometric Power Sums. Algorithms 2024, 17, 373. [Google Scholar] [CrossRef]
- Lundberg, E. Om Hypergoniometriska Funktioner af Komplexa Variabla; Förf: Stockholm, Norvey, 1879. [Google Scholar]
- Rosenberg, R. The Ateb(h) and their proporties. Quart. Appl. Math. 1963, 21, 37–47. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I. Handbook of Mathematical Functions, 9th ed.; Cambridge University Press: New York, NY, USA, 2016; p. 416. [Google Scholar]
- Cveticanin, L. Generalized Krylov-Bogoliubov Method for Solving Strong Nonlinear Vibration. In Lectures on Nonlinear Dynamics; Springer: Cham, Switzerland, 2024; p. F1825. [Google Scholar] [CrossRef]
- Cveticanin, L. Strong Nonlinear Oscillators. In Mathematical Engineering. Analytical Solution; Springer: Cham, Switzerland; Berlin, Germany, 2018; pp. 1–296. [Google Scholar] [CrossRef]
- Kraljevic, S.; Zukovic, M.; Cveticanin, L. Oscillatory systems with two degrees of freedom and van der Pol coupling: Analytical approach. Math. Methods Appl. Sci. 2025, 48, 2474–2492. [Google Scholar] [CrossRef]
- Nazarkevych, M. Methods for Increasing the Efficiency of Printing Protection by Means of Ateb-Functions: Monograph; Publishing House of the National University «Lviv Polytechnic»: Lviv, Ukraine, 2011; 188p. (In Ukrainian) [Google Scholar]
- Dronyuk, I. Information Protection Technologies on Tangible Media: Monograph; Publishing House of the National University «Lviv Polytechnic»: Lviv, Ukraine, 2017; 200p. (In Ukrainian) [Google Scholar]
- Dronyuk, I.; Nazarkevych, M.; Poplavska, Z. Gabor filters generalization based on ateb-functions for information security. Adv. Intell. Syst. Comput. 2018, 659, 195–206. [Google Scholar] [CrossRef]
- Nazarkevych, M.; Logoyda, M.; Troyan, O.; Vozniy, Y.; Shpak, Z. The ateb-gabor filter for fingerprinting. Adv. Intell. Syst. Comput. 2020, 1080, 247–255. [Google Scholar] [CrossRef]
- Kac, V.; Cheung, P. Quantum Calculus; Springer: New York, NY, USA, 2002. [Google Scholar]
- Andrianov, I.; Awrejcewicz, J. Asymptotic Methods for Engineers; CRC Press: Boca Raton, FL, USA, 2024. [Google Scholar] [CrossRef]
- Senik, P.M. On Ateb-functions. Proc. Ukr. Acad. Sci. Ser. A 1968, 1, 23–27. [Google Scholar]
- Senik, P.M. Inversion of the incomplete beta function. Ukr. Math. J. 1969, 21, 271–278. [Google Scholar] [CrossRef]
- Drohomyretska, K.T. Integration of Some Ateb-Functions; Physical and Mathematical Sciences; Bulletin of the State University «Lviv Polytechnic»: Lviv, Ukraine, 1997; Volume 46, pp. 108–110. (In Ukrainian) [Google Scholar]
- Demydov, I.; Dronyuk, I.; Fedevych, O.; Romanchuk, V. Traffic Fluctuations Optimization for Telecommunication SDP Segment Based on Forecasting Using Ateb-Functions. In Lecture Notes on Data Engineering and Communications Technologies; Springer: Cham/Berlin, Germany, 2019; Volume 20. [Google Scholar] [CrossRef]
- Rebot, D.; Shcherbovskykh, S.; Stefanovych, T.; Topilnytskyy, V. Vibration Effect Modelling Based Ateb-Functions for Printed Circuit Boards of Control Machines. In Proceedings of the IEEE 17th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering, Lviv, Ukraine, 8–12 October 2024; pp. 370–373. [Google Scholar] [CrossRef]
- Edmunds, D.E.; Gurka, P.; Lang, J. Properties of generalized trigonometric functions. J. Approx. Theory 2012, 164, 47–56. [Google Scholar] [CrossRef]
- Ghose-Choudhury, A.; Ghosh, A.; Guha, P.; Pandey, A. On purely nonlinear oscillators generalizing an isotonic potential. Int. J. Non-Linear Mech. 2018, 106, 55–59. [Google Scholar] [CrossRef]
- Ghosh, A.; Bhamidipati, C. Action-angle variables for the purely nonlinear oscillator. Int. J. Non-Linear Mech. 2019, 116, 167–172. [Google Scholar] [CrossRef]
- Cveticanin, L.; Vujkov, S.; Cveticanin, D. Application of Ateb and generalized trigonometric functions for nonlinear oscillators. Arch. Appl. Mech. 2020, 90, 2579–2587. [Google Scholar] [CrossRef]
- Cieśliński, J. New definitions of exponential, hyperbolic and trigonometric functions on time scales. J. Math. Anal. Appl. 2012, 44, 8–22. [Google Scholar] [CrossRef]
- Al-Omari, S.K. On a q-Laplace–type integral operator and certain class of series expansion. Math. Methods Appl. Sci. 2020, 44, 8322–8332. [Google Scholar] [CrossRef]
- Al-Omari, S.K. The q-Sumudu transform and its certain properties in a generalized q-calculus theory. Adv. Differ. Equ. 2021, 10, 247–255. [Google Scholar] [CrossRef]
- Alatawi, M.S.; Khan, W.A.; Ryoo, C.S. Explicit Properties of q-Cosine and q-Sine Array-Type Polynomials Containing Symmetric Structures. Symmetry 2022, 14, 1675. [Google Scholar] [CrossRef]
- Sokil, B.I. Nonlinear Oscillations of Mechanical Systems and Analytical Methods of Their Research. Ph.D. Thesis, National University “Lviv Polytechnic”, Lviv, Ukraine, 2001; 36p. (In Ukrainianan). [Google Scholar]
- Gosper, R.W. Experiments and Discoveries in q-Trigonometry. In Symbolic Computation, Number Theory, Special Functions, Physics and Combinatorics. In Proceedings of the Conference Held at the University of Florida, Gainesville, FL, USA, 11–13 November 1999; Garvan, F.G., Ismail, M.E.H., Eds.; Kluwer: Dordrecht, The Netherlands, 2001; pp. 79–105. [Google Scholar]
- Koekoek, R.; Swarttouw, R.F. The Askey-Scheme of Hypergeometric Orthogonal Polynomials and its q-Analogue. Delft Fac. Tech. Math. Inform. Rep. 1998, 98, 18–19. [Google Scholar]
- Dronyuk, I.M.; Shpak, Z.Y.; Demyda, B.A. Investigation of time scaling for the inverted Beta functions. Ukr. J. Inf. Technol. 2019, 1, 72–75. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dronyuk, I. Algorithms for Calculating Generalized Trigonometric Functions. Algorithms 2025, 18, 60. https://doi.org/10.3390/a18020060
Dronyuk I. Algorithms for Calculating Generalized Trigonometric Functions. Algorithms. 2025; 18(2):60. https://doi.org/10.3390/a18020060
Chicago/Turabian StyleDronyuk, Ivanna. 2025. "Algorithms for Calculating Generalized Trigonometric Functions" Algorithms 18, no. 2: 60. https://doi.org/10.3390/a18020060
APA StyleDronyuk, I. (2025). Algorithms for Calculating Generalized Trigonometric Functions. Algorithms, 18(2), 60. https://doi.org/10.3390/a18020060