

What Is a Causal Graph?

Statistical Laboratory, University of Cambridge, Cambridge CB2 1TN, UK
Algorithms 2024, 17(3), 93; https://doi.org/10.3390/a17030093
Submission received: 23 January 2024
/
Revised: 14 February 2024
/
Accepted: 18 February 2024
/
Published: 21 February 2024
(This article belongs to the Special Issue Bayesian Networks and Causal Reasoning)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
This article surveys the variety of ways in which a directed acyclic graph (DAG) can be used to represent a problem of probabilistic causality. For each of these ways, we describe the relevant formal or informal semantics governing that representation. It is suggested that the cleanest such representation is that embodied in an augmented DAG, which contains nodes for non-stochastic intervention indicators in addition to the usual nodes for domain variables.
1. Introduction
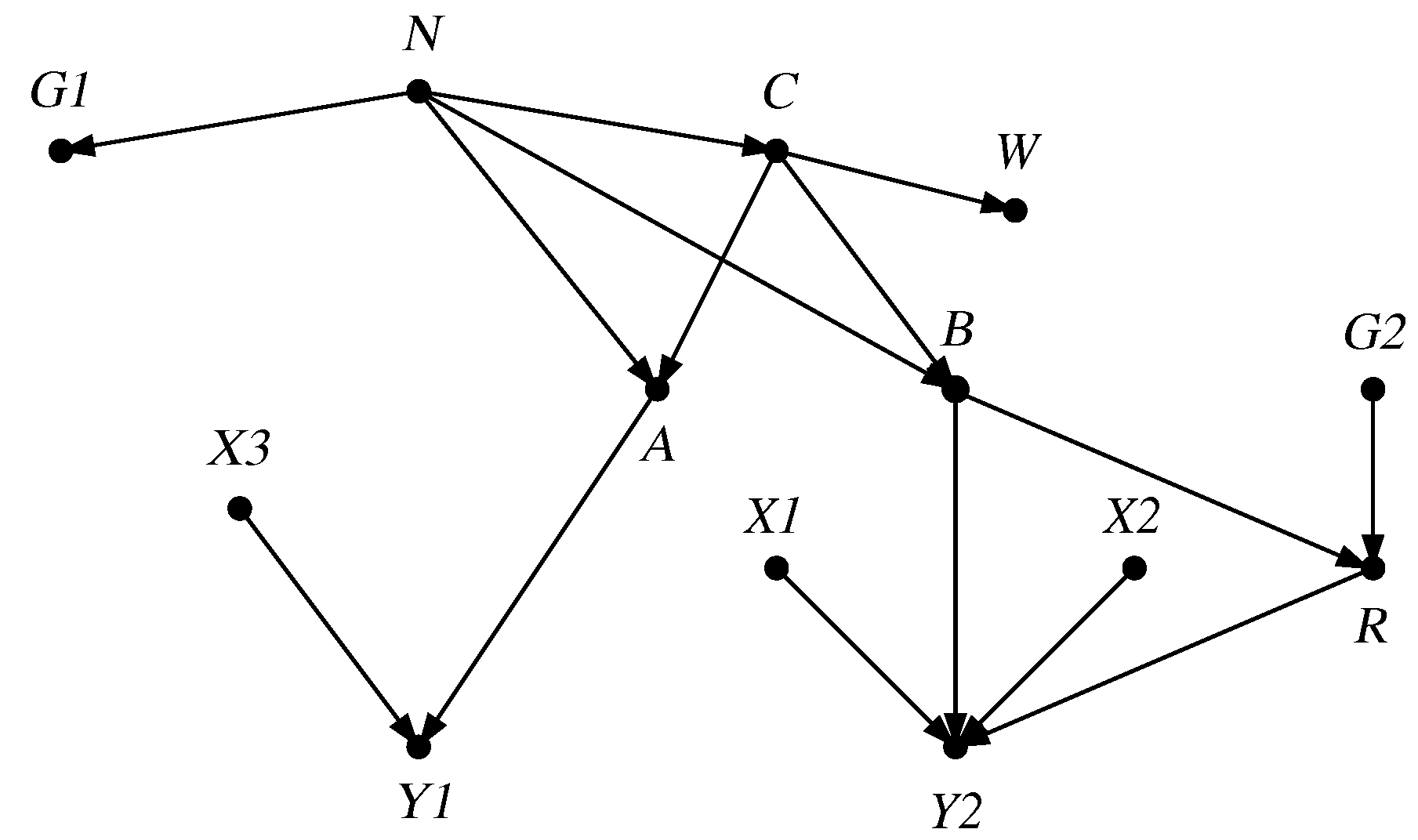
Graphical representations of probabilistic [1,2,3] and causal [4] problems are ubiquitous. Such a graph has nodes representing relevant variables in the system, which we term domain variables, and arcs between some of the nodes. The most commonly used type of graph for these purposes, to which we will confine the attention of this article (however, other types of graph also have valuable applications), is a directed acyclic graph (DAG), in which the arcs are arrows and it is not possible to return to one’s starting point by following the arrows. An illustration of such a DAG [5] is given in Figure 1.
Now, there is no necessary relationship between a geometric object, such as a graph, and a probabilistic or causal model; they inhabit totally different mathematical universes. Any such relationship must therefore be specified externally, which then constitutes a way of interpreting the graph as saying something about the problem at hand. It is important to distinguish between the syntax of a graph, i.e., its internal, purely geometric properties, and its semantics, describing its intended interpretation.
In this article, we consider a variety of ways—some formal, some less so—in which DAGs have been and can be interpreted. In particular, we emphasise the importance of a clear understanding of what the intended interpretation is in any specific case. We caution against the temptation to interpret purely syntactical elements, such as arrows, semantically (the sin of “reification”) or to slide unthinkingly from one interpretation of the graph to another.
The material in this article is largely a survey of previously published material [6,7,8,9,10,11,12,13,14,15,16,17,18], which should be consulted for additional detail, discussion, and references. In particular, we do not here showcase the wealth of important applications of the methods discussed.
Outline
In Section 2, we describe how a DAG can be used to represent properties of probabilistic independence between variables using precise semantics based on the method of moralisation. An alternative representation, involving functional rather than probabilistic dependencies, is also presented. Section 3 discusses some informal and imprecise ways in which a DAG might be considered as representing causal relations. In preparation for a more formal approach, Section 4 describes an understanding of causality as a reaction to an external intervention in a system and presents an associated language based on an extension of the calculus of conditional independence for expressing and manipulating causal concepts. Turning back to the DAG model, in Section 5, we introduce precise semantics for its causal interpretation, again based on moralisation but this time used to express extended conditional independence properties. To this end, we introduce augmented DAGs, which contain nodes for non-stochastic intervention indicators as well as for stochastic domain variables. In Section 6, we describe the causal semantics of a “Pearlian” DAG [4] and show how these can be explicitly represented by an augmented DAG, where again, a version involving functional relationships—the structural causal model (SCM)—is available.
Section 7 considers a different type of causal problem that is not about the response of a system to an intervention but rather aims to assign to an observed putative cause responsibility for the emergence of an observed outcome. This requires new understandings and semantics that cannot be represented by a probabilistic DAG but can be by using a structural causal model. However, this is problematic, since there can be distinct SCMs that are observationally equivalent but lead to different answers.
2. Probabilistic DAG
The most basic way of interpreting a DAG is as a representation of qualitative probabilistic relations of conditional independence between its variables. Such a situation occupies the lowest rung of the “ladder of causation” [19]. The semantics governing such a representation, while precise, are not totally straightforward, being described by either of two logically equivalent criteria, known as “d-separation” [20,21] and “moralisation” [22]. Here, we describe moralisation, using the specific DAG of Figure 1 for illustration.
Suppose we ask: Is the specific conditional independence property
(read as “the pair is independent of , conditional on ”; see [23]) represented by the graph? To address this query, we proceed as follows:
- 1.
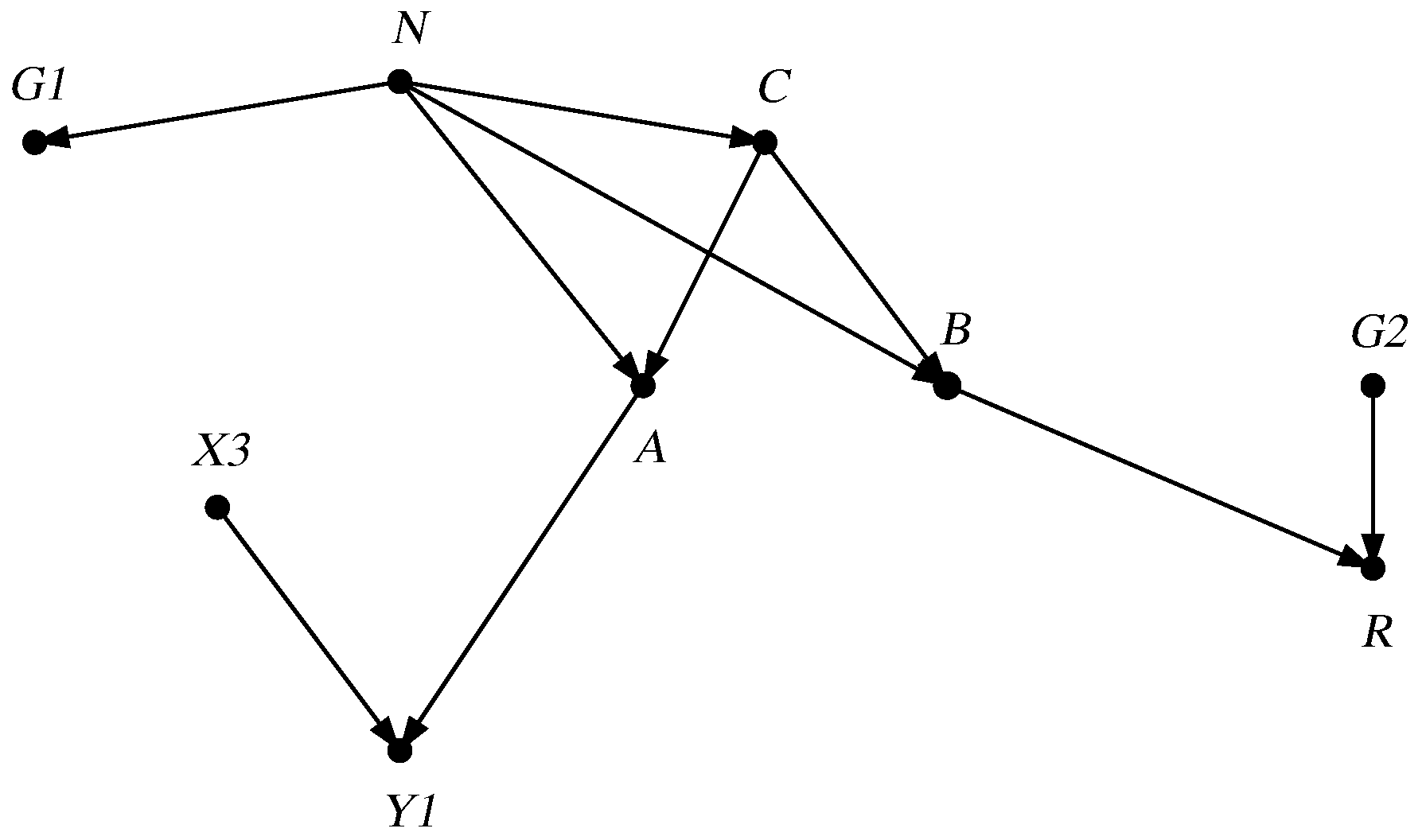
- Ancestral graph. We form a new DAG by removing from every node that is not mentioned in the query and is not an ancestor of a mentioned node (i.e., there is no directed path from it to a mentioned node), as well as any arrow involving a removed node. Figure 2 shows the result of applying this operation to Figure 1.
- 2.
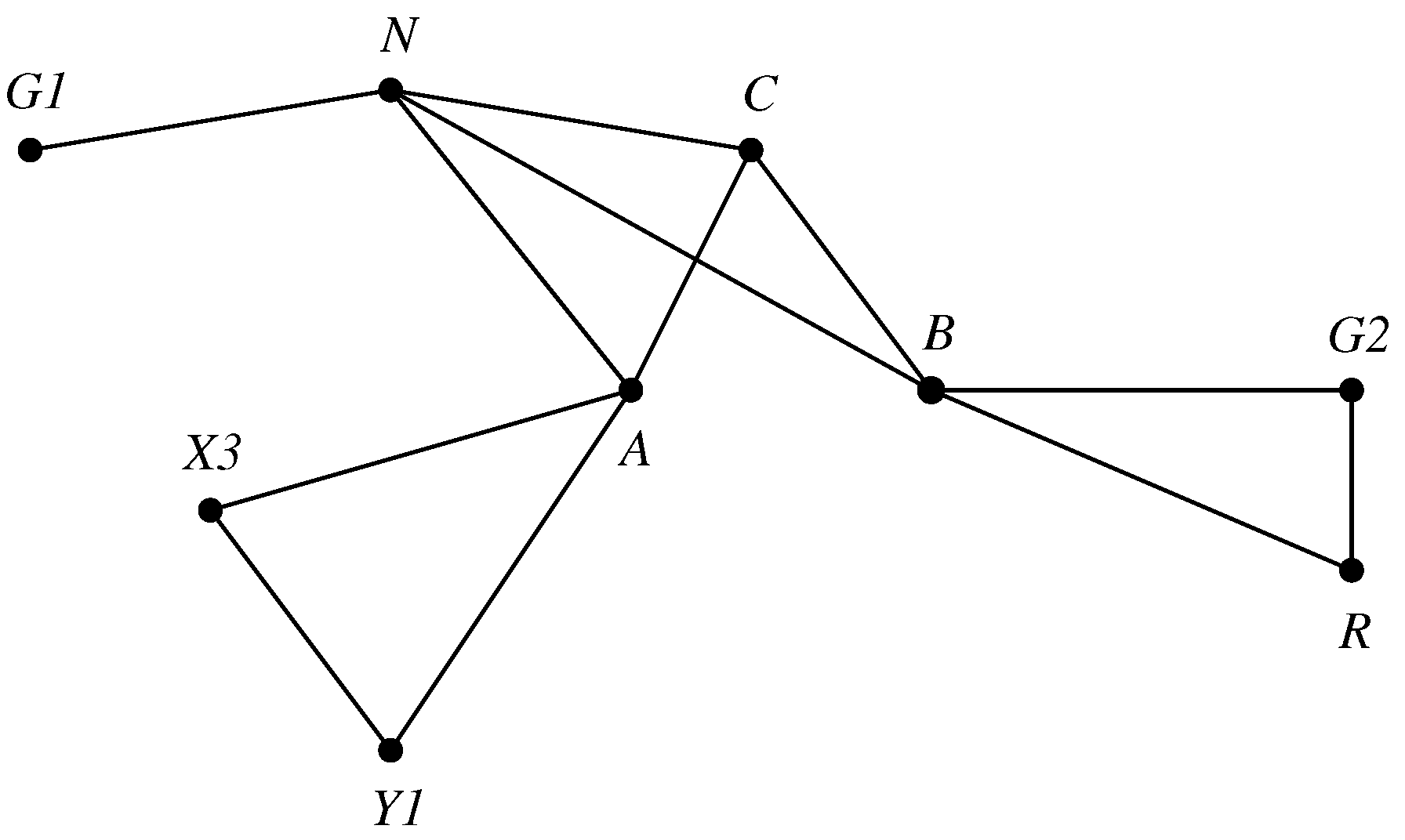
- Moralisation. If in there are two nodes that have a common child (i.e., each has an arrow directed from it to the child node), but they are not themselves joined by an arrow—a configuration termed “immorality”—then an undirected edge is inserted between them. Then, every remaining arrowhead is removed, yielding an undirected graph . In our example, this yields Figure 3.
- 3.
- Separation. Finally, in , we look for a continuous path connecting an element of the first set in our query (here ) to an element of the second set (here ) that does not contain an element of the third set (here ). If there is no such path, we conclude that the queried conditional independence property is represented in the original DAG. Since this is the case in our example, the property is indeed represented in dag.
2.1. Instrumental Variable
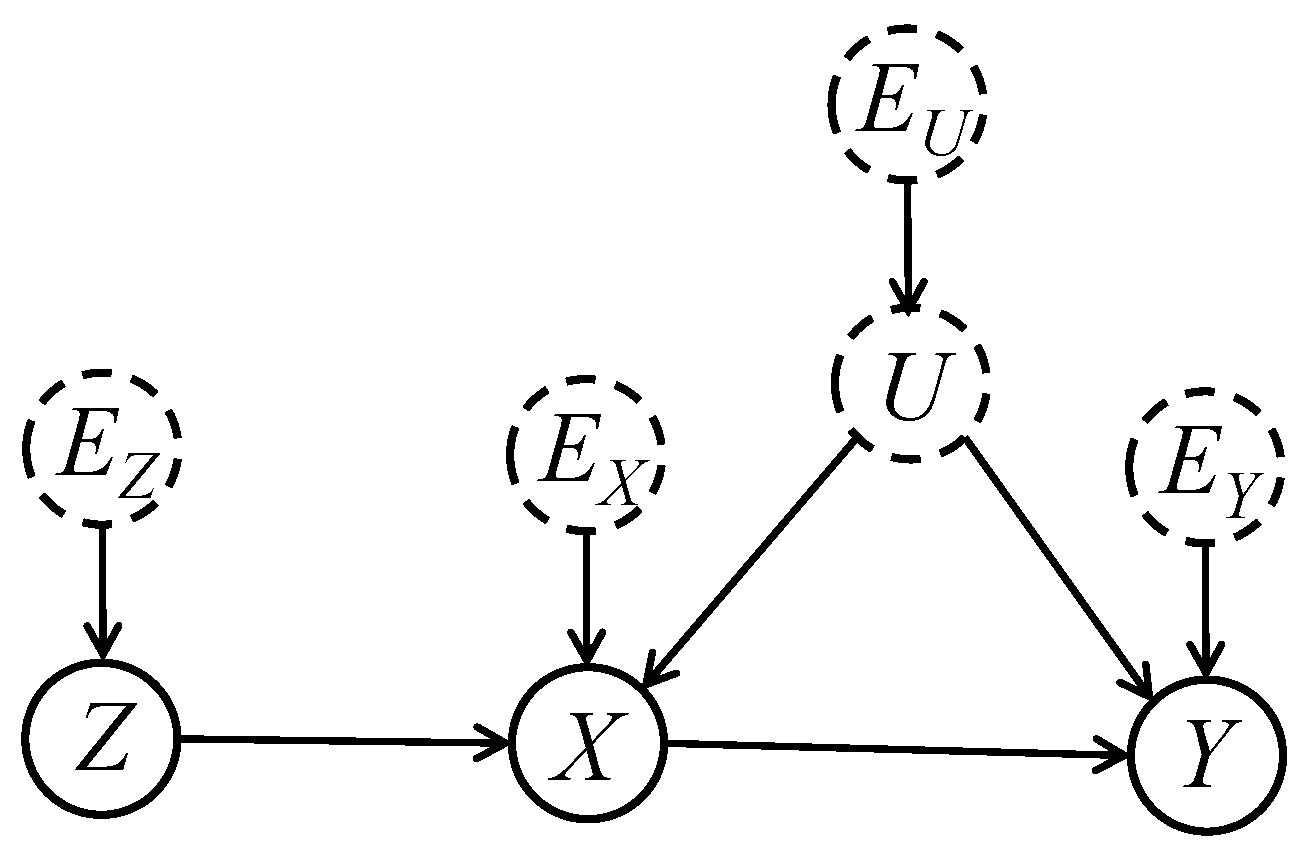
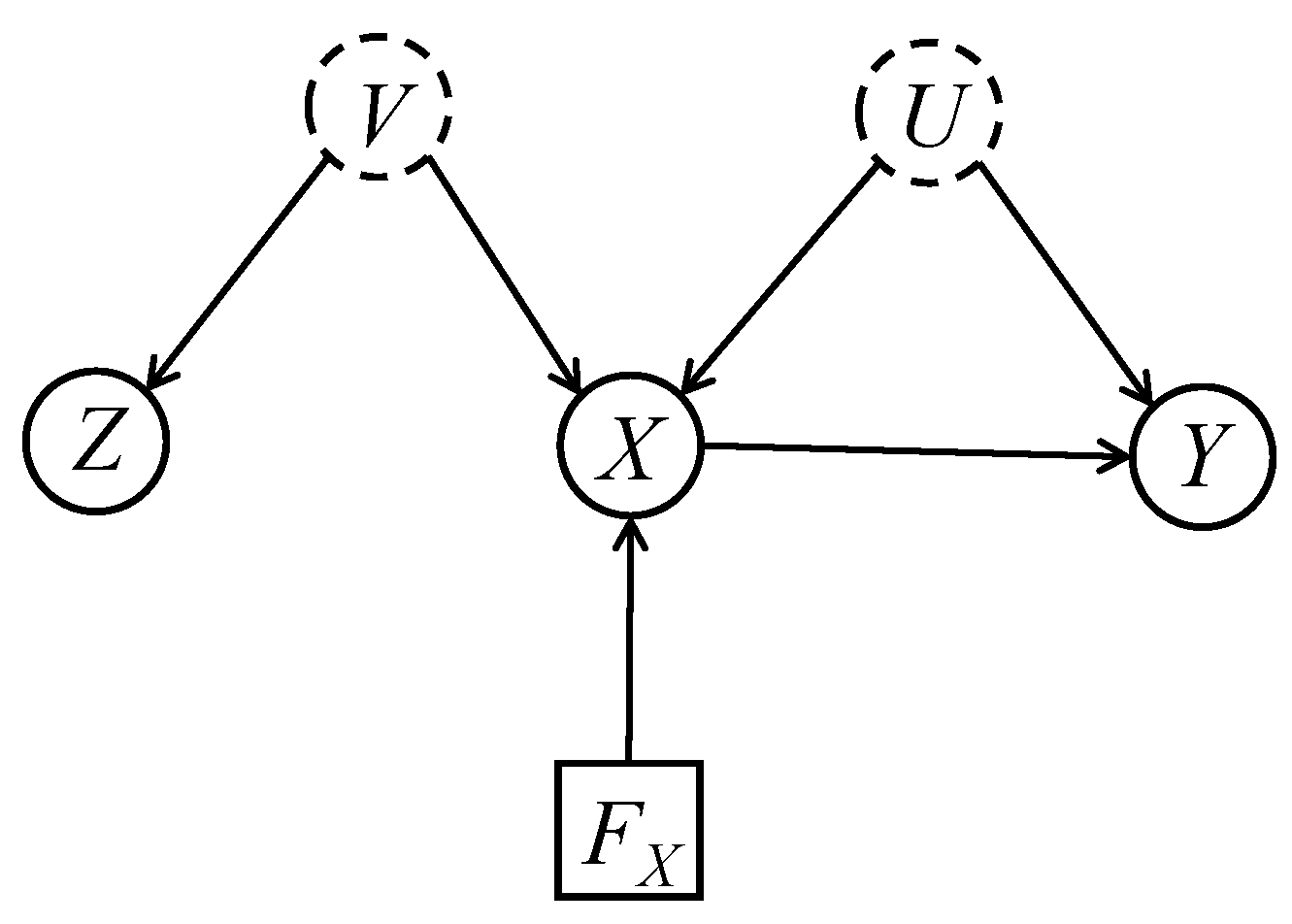
The DAG of Figure 4 can be used to represent a problem in which we have an “instrumental variable”, with the nodes interpreted as follows:
- X
- Exposure
- Y
- Outcome
- Z
- Instrument
- U
- Unobserved confounding variables (the dotted outline on node U serves as a reminder that U is unobserved but is otherwise of no consequence).
2.2. Markov Equivalence
Given a collection of conditional independence relations for a set of variables, there may be 0, 1, or several DAGs that represent just these relations. Two DAGs are termed Markov equivalent when they represent identical conditional independencies. It can be shown [24,25] that this will be the case if they have the same skeleton (i.e., the undirected graph obtained by deleting the arrowheads) and the same immoralities.
Example 1.
Consider the following DAGs on three nodes:
- 1.
- ;
- 2.
- ;
- 3.
- ;
- 4.
- .
These all have the same skeleton. However, whereas DAGs 1, 2, and 3 have no immoralities, 4 has one immorality. Consequently, 1, 2, and 3 are all Markov equivalent, but 4 is not Markov equivalent to these. Indeed, 1, 2, and 3 all represent the conditional independence property , whereas 4 represents the marginal independence property .
2.3. Bayesian Network
The purely qualitative graphical structure of a probabilistic DAG can be elaborated with quantitative information. With each node in the DAG, we associate a specified conditional distribution for its variable, given any values for its parent variables. There is a one–one correspondence between a collection of all such parent–child distributions, and a joint distribution for all the variables that satisfies all the conditional independencies represented by the graph. The graphical structure also supports elegant algorithms for computing marginal and conditional distributions [3].
2.4. Structural Probabilistic Model
Suppose we are given the conditional distribution . It is then possible to construct (albeit non-uniquely) a fictitious “error variable” E, having a suitable distribution P, and a suitable deterministic function f of , such that the distribution of is just . For example, using the probability integral transform, if is the cumulative distribution function of , we can take (using a suitable definition of the inverse function when is not continuous) and E uniform on . However, such a representation is highly non-unique. Indeed, we could alternatively take , where e is now a vector and the multivariate distribution of E is an arbitrarily dependent copula, such that each entry is uniform on .
Given any such construction, for purely distributional purposes we can work with the functional equation , with independently of X. This operation can be extended to apply to a complete Bayesian network by associating with each domain variable V a new error variable , with a suitable distribution , all these being independent, and with V being modelled as a suitable deterministic function of its graph parent domain variables and . We term such a deterministic model a structural probabilistic model (SPM), in analogy with the structural causal model (SCM) of [19]; see Section 6.1 below. In an SPM, all stochasticity is confined to the error variables.
An SPM can be represented graphically by introducing new nodes for the error variables, as illustrated in Figure 5 for the case of Figure 4, it being understood that the error variables are modelled as random, but all other parent–child relations are deterministic.
It is easy to check that the conditional independencies represented between the domain variables, as revealed by the moralisation criterion, are identical, both in the original graph and in an SPM extension of it. So, when each graph is endowed with its own parent–child relationships (stochastic, in the case of the original graph, and deterministic, for the structural graph), both graphs describe the identical joint distribution for the domain variables. For purely probabilistic purposes, nothing is gained by introducing error variables to “mop up” the stochastic dependencies of a simple DAG model.
2.5. Reification
It is important to keep in mind that a probabilistic DAG is nothing but a very indirect way of representing a collection of conditional independence properties. In particular, the arrows in the DAG have no intrinsic meaning; they are there only to support the moralisation procedure. It is indeed somewhat odd that the property of conditional independence, which is essentially a symmetric one, can be represented at all by means of arrows, which have built-in directionality. The example of Markov equivalence between 1, 2, and 3 in Example 1 shows that the specific direction of an arrow in a DAG should not be taken as meaningful itself. Rather, an arrow has a transient status, rather like that of a construction line in an architect’s plan or of a contour line on a map: instrumentally helpful but not representing anything visible in the house or on the ground.
Nevertheless, on looking at a DAG, it is hard to avoid the temptation to imbue its arrows with a direct meaning in relation to the system studied. This is the philosophical error of reification, which confuses the map with the territory [26], wrongly interpreting a purely instrumental property of a representation as if it had a direct counterpart in the external system. In the case of a probabilistic DAG model, this frequently leads to endowing it with an unjustified causal interpretation, where the presence of an arrow is considered to represent the presence of a causal influence of A on B. Such a confusion underlies much of the enterprise of “causal discovery”, where observational data are analysed to uncover their underlying probabilistic conditional independencies; these are represented by a probabilistic DAG, and that DAG is then reinterpreted as representing causal relations.
This is not to say that a DAG cannot be interpreted causally, but to do so will require a fresh start with new semantics.
3. Informal Causal Semantics
Common causal interpretations of a DAG involve statements such as the following:
- An arrow represents a direct cause;
- A directed path represents a causal pathway.
Or, as described, for example, by [27], the following:
“A causal DAG is a DAG in which:
- 1.
- 2.
Thus, Figure 4 might be interpreted as saying the following:
- U is a common cause of X and Y;
- Z affects the outcome Yonly through X;
- Z does not share common causes with Y;
- Z has a direct causal effect on X.
In the above, we have marked syntactical terms relating to the graph itself (the “map”) in boldface and terms involving external concepts (the “territory”) in teletype.
3.1. Probabilistic Causality
Alternatively, one can start by ignoring the DAG and trying to relate causal concepts directly to conditional independence. Such an approach underlies the enterprise of causal discovery, where discovered conditional independencies are taken to signify causal relations. Common assumptions made here are as follows (though even when all terms involved are fully understood, one might question just why these assumptions should be regarded as appropriate):
- Weak causal Markov assumption: If X and Y have no common cause (including each other), they are probabilistically independent;
- Causal Markov assumption: A variable is probabilistically independent of its non-effects, given its direct causes.
Combining such assumptions with the formal semantics by which a DAG represents conditional independence, we obtain a link between the DAG and causal concepts.
3.2. A Problem
How could we check if a DAG endowed with a causal interpretation along the above lines is a correct representation of the external problem it is intended to model? To even begin to do so, we would already need to have an independent understanding of the external concepts, as marked in teletype, which thus cannot make reference to the graph itself. But these informal causal concepts are woolly and hard to pin down. Unless this is done, however, using such informal causal semantics risks generating confusion rather than clarification.
To avoid confusion, we need to develop a more formal causal semantics.
4. Interventional Causality and Extended Conditional Independence
Our approach to this begins by introducing an explicit, non-graphical understanding of causality, expressed in terms of the probabilistic response of a system to an (actual or proposed) intervention. A causal effect of A on B exists if the distribution of B, after an external intervention sets A to some value a, varies with a. Formally, we introduce a non-stochastic variable , having the same set of values as A, such that describes the regime in which A is set to value a by an external intervention (here, we shall only consider “surgical interventions”, such that ). Then, A has no causal effect on B just when the distribution of B, given , does not depend on a.
If were a stochastic variable, this would just be the usual property of independence of B from , notated as
Now, not only does this understanding of independence remain intuitively meaningful in the current case that is a non-stochastic variable, but the formal mathematical properties of independence and conditional independence can be rigorously extended to such cases [14,23,28]; we term this extended conditional independence (ECI). The standard axioms of conditional independence apply, with essentially no changes, to ECI. (In ECI, we interpret as the property that the conditional distribution of A, given and , depends only on c. Here, we can allow B and C to include non-stochastic variables; however, A must be fully stochastic.) Since much of the enterprise of statistical causality involves drawing causal conclusions from observational data, we further endow with an additional state ∅, read as “idle”: denotes the regime in which no intervention is applied to A, but it is allowed to develop “naturally” in the observational setting. The distinction between A and is that the state of A describes what value was taken, while the state of describes how that value was taken.
We regard the main thrust of causal statistical inference as aiming to deduce properties of a hypothetical interventional regime, such as the distribution of B given , from observational data, obtained under the idle regime . But since there is no logically necessary connexion between the distributions under different regimes, suitable assumptions will need to be made—and justified—to introduce such connexions.
The simplest such assumption—which, however, will only very rarely be justifiable—is that when we consider the distribution of B given A, we need to know what was the value a that A took but not how it came to take that value (i.e., not whether this was in the observational regime or in the interventional regimes ), the conditional distribution of B being the same in both cases. That is,
This is the property of ignorability. When this strong property holds, we can directly take the observed distribution of B given for the desired interventional distribution of B given : the distribution of B given A is a “modular component”, transferable between different regimes.
We note that (4) can be expressed succinctly using ECI notation as
As exemplified by (3) and (5), ECI supplies a simple and powerful language for expressing and manipulating causal concepts.
5. Augmented DAG
We can now introduce formal graphical causal semantics, so moving onto the second rung of the ladder of causation. This is based on ECI represented by an augmented DAG, which is just like a regular DAG except that some of its nodes may represent non-stochastic variables, such as regime indicators. We may indicate a non-stochastic variable by a square node, and a stochastic variable by a round node; however, this distinction does not affect how we use the DAG. Just as certain collections of purely probabilistic conditional independence properties can usefully and precisely be represented (by moralisation) by means of a regular DAG, so we may be able to construct an augmented DAG to represent (by exactly the same moralisation criterion) causal properties of interest expressed in terms of ECI.
Consider, for example, the simple augmented DAG
This represents (by moralisation, as always) the ECI property of (5), and so is a graphical representation of the ignorability assumption. Note that it is the whole structure that, with ECI, imparts causal meaning to the arrow from A to B: the direction of that arrow would not otherwise be meaningful in itself.
Example 2.
Consider the following augmented DAG modifications of the first three DAGs of Example 1 to allow for an intervention on A:
- 1.
- ;
- 2.
- ;
- 3.
- .
We saw in Example 1 that, without the node , these DAGs are all Markov equivalent. With included, we see that DAGs 2 and 3 are still Markov equivalent since they have the same skeleton and the same unique immorality , but they are no longer Markov equivalent to DAG 1, which does not contain that immorality. All three DAGs represent the ECI , which says that, in any regime, A is independent of C given B (in fact, this only has bite for the idle regime since, in an interventional regime , A has a degenerate distribution at a, so that the conditional independence is trivially satisfied); however, while DAGs 2 and 3 both represent the ECI , which implies that A does not cause either B or C, DAG 1 instead represents the ECI , expressing the ignorability of the distribution of given A.
Note, moreover, that the Markov equivalence of DAGs 2 and 3 means that we can not interpret the direction of the arrow between B and C as meaningful in itself. In particular, in DAG 3, the arrow does not signify a causal effect of B on C; in this approach, causality is only described by ECI properties and their moralisation-based graphical representations.
Example 3.
To endow the instrumental variable problem of Figure 4 with causal content—specifically, relating to the causal effect of X on Y—we might replace it with the augmented DAG of Figure 6, where the node now allows us to consider an intervention on X.
This DAG still represents the probabilistic conditional independencies (1) and (2) in any regime. But now it additionally represents genuine causal properties:
Property (6) says that X has no causal effect on U and Z, these having the same joint distribution in all regimes (including the idle regime). Property (7) entails the modular conditional ignorability property that the distribution of Y given (which, in fact, depends only on , from (1)) is the same, both in the interventional regime, where X is set to x, and in the observational regime, where X is not controlled. Although rarely stated so explicitly, these assumptions are basic to most understandings of an instrumental variable problem and its analysis (which we shall not, however, pursue here).
If we wanted, we could work with an augmented version of the SPM representation of Figure 5, as in Figure 7. This entails exactly the same ECI properties as Figure 6 for the domain variables and the intervention variable. With suitably chosen distributions for the error variables and functional dependence of each domain variable on its parents, we can recover the same joint distribution for the domain variables, in any regime, as in the original probabilistic augmented DAG. Inclusion of the extra structure brings nothing new to the table.
Yet another representation of the problem is given in Figure 8.
Here, V denotes an additional unobserved variable of no direct interest. It can again be checked that both Figure 6 and Figure 8 represent the identical ECI properties between the variables of interest, and U and . This identity shows that the arrow in Figure 6 should not be taken as signifying a direct causal effect of Z on X: we could equally well regard X and Z as being associated through a common cause, V. Hernán and Robins [27] regard Figure 6 and Figure 8 as essentially different—as indeed they would be if interpreted in these informal terms—and conclude (correctly) that it is not necessary for analysing the instrumental variable problem to require that Z have a direct effect on X. From our point of view, there is no essential difference between Figure 6 and Figure 8 since, even in Figure 6, the arrow should not be interpreted causally.
6. Pearlian DAG
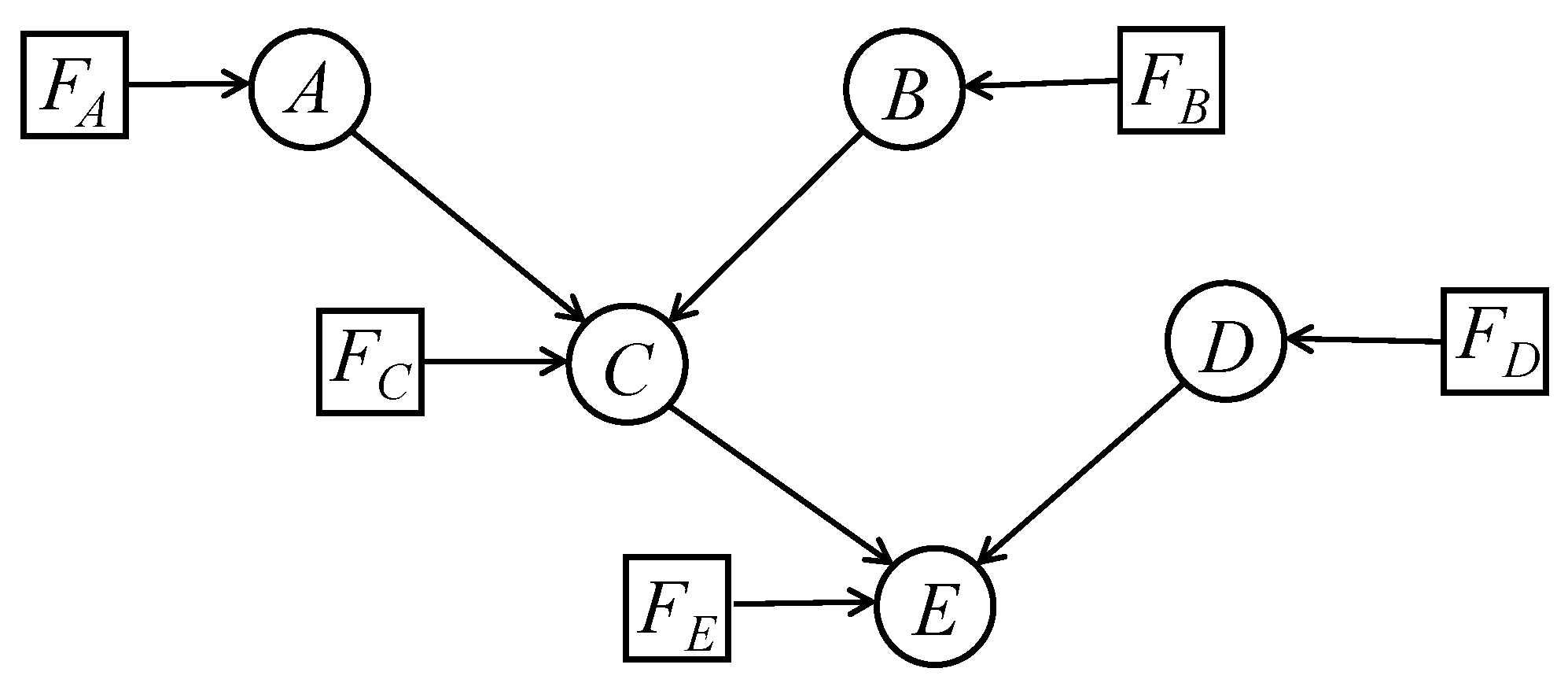
Consider the DAG of Figure 9.
As it stands, this looks like a probabilistic DAG, representing purely conditional independence properties, such as . Pearl [4], however, would endow it with additional causal meaning, using an interventional interpretation as in Section 4. He would regard it as asserting that, for any node, its conditional distribution, given its parents, would be the same in a purely observational setting and in any interventional setting that sets the values of some or all of the variables other than itself. For example, it requires the following:
The distribution of C, given , does not depend on whether A and B arose naturally or were set by external intervention.
While this is a perfectly clear formal interpretation of Figure 9, it is problematic in that, if we are just presented with that DAG, we may not know whether it is meant to be interpreted as representing only probabilistic properties or it is supposed to be further endowed with Pearl’s causal semantics. This ambiguity can lead to confusion; a particular danger is to see, or construct, a probabilistic DAG, and then slide, unthinkingly, into giving it an unwarranted Pearlian causal interpretation.
We can avoid this problem by explicit inclusion of regime indicators, one for each domain variable, as, for example, in Figure 10.
Not only is this clearly not intended as a probabilistic DAG but the Pearlian causal semantics, which, in the case of Figure 9, require external specification, are now explicitly represented in the augmented DAG by moralisation. For example, Figure 10 represents the ECI . When , C has a one-point distribution at c and this ECI holds trivially. But, for , we recover the property quoted in italics above (under any settings, idle or interventional, of and ).
We also note that an augmented Pearlian DAG can have no other Markov equivalent such DAG, since no arrow can be reversed without creating or destroying an immorality. In this sense, every arrow now carries causal meaning.
However, just as we should not automatically interpret a regular DAG as Pearlian, so we should not unthinkingly simply augment it by adding an intervention indicator for each domain variable, which would have the same effect. We must consider carefully whether the many very strong properties embodied in any Pearlian or augmented DAG, relating probabilistic properties (parent–child distributions) across distinct regimes, are justifiable in the specific applied context we are modelling.
6.1. Structural Causal Model
We can also reinterpret a SPM, such as in Figure 5, using Pearlian semantics, as a causal model: a structural causal model (SCM) (where the possibility of intervention is envisaged for each of the domain variables but not for the fictitious error variables). This would then assert that the distributions of the error variables and the functional dependence of each non-intervened domain variable on its parents are the same in all regimes, whether idle or subject to arbitrary interventions.
Again, to avoid confusion with a SPM, it is advisable to display a SCM as an augmented DAG, by explicitly including intervention indicators (as in Figure 7, but having an intervention indicator associated with every domain variable).
However, construction and inclusion of fictitious error variables is of no consequence since, if we concentrate on the domain variables alone, their probabilistic structure in any regime will be exactly the same as for the fully probabilistic augmented DAG. In particular, no observations on the domain variables under any regime or regimes can resolve the arbitrariness in the specifications of the error distributions and the functional relationships in a SCM. On this second rung of the ladder of causation, the additional structure of the SCM once again gains us nothing.
7. Causes of Effects
So far we have only considered modelling and analysing problems relating to the “effects of causes (EoC)”, where we consider the downstream consequences of an intervention. An entirely different class of causal questions relates to “causes of effects (CoE)” [17], where, in an individual case, both a putative causal variable X and a possible consequence Y of it have been observed, and we want to investigate whether X was indeed the cause of Y. Such problems arise in the legal context, for example, when an individual sues a pharmaceutical company claiming that it was because she took the company’s drug that she developed a harmful condition.
At the simplest level, we may only have information about the joint distribution of and their values, x and y, for the case at hand. But this is not enough to address the CoE question, which refers, not to unknown facts or variables, but to an unknown relationship: was it causal? Trying to understand this question takes us into new territory: the third rung of the ladder of causation.
Although by no means totally satisfactory, this question is most commonly understood as relating to a counterfactual situation. Suppose both X and Y are binary, and we have observed . We might express the “event of causation” as follows:
The outcome variable would have been different (i.e., ) if the causal variable had been different (i.e., ).
But the hypothesis here, , contradicts the known fact that ; it is counterfactual. Since in no case can we observe both and —what has been called “the fundamental problem of causal inference” [29]—it would seem impossible to address this question, at any rate on the basis of purely factual knowledge of the joint distribution of . So, a more complicated framework is required, necessitating more complex assumptions and analyses [30].
One approach builds on the idea of “potential responses”, popularised by Rubin [31,32], which were initially proposed for addressing EoC questions—which, as we have seen, can progress perfectly well without them. They do, however, seem essential for formulating counterfactual questions. For the simple example above, we duplicate the response Y, replacing it by the pair , with conceived of as a potential response that would be realised if in fact . Then, the probability of causation (PC) can be defined as the conditional probability, given the data, of the event of causation:
There is, however, a difficulty: on account of the fundamental problem of causal inference, no data of any kind could ever identify the joint distribution of , so PC is not estimable. It turns out that data supplying the distribution of the observable variables can be used to set interval bounds on PC, and these bounds can sometimes be refined if we can collect data on additional variables [13,33], but only in very special cases can we obtain a point value for PC.
Graphical Representation
Because PC cannot be defined in terms of observable domain variables, we cannot represent a CoE problem by means of a regular or augmented DAG on these variables. It is here that the expanded SCM version appears to come into its own.
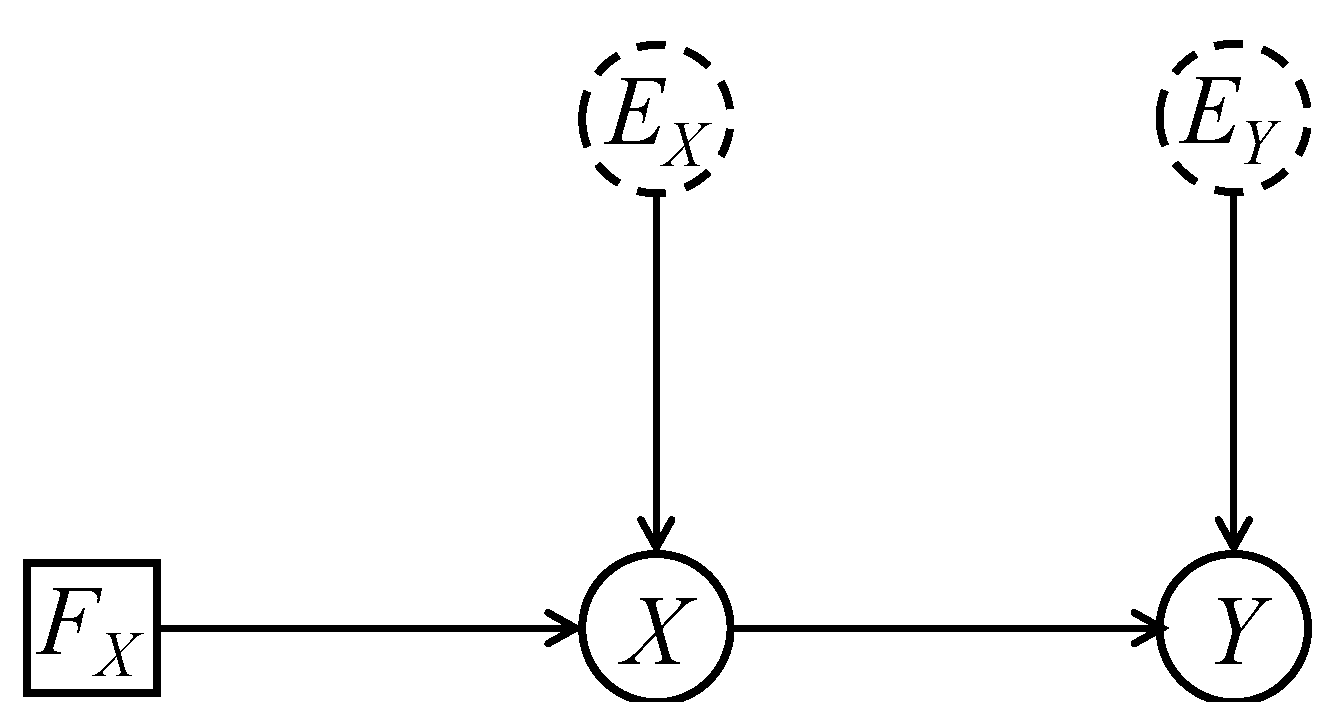
Thus, consider the simple SCM of Figure 11.
In the observational regime, we have , , and . The deterministic structure of a SCM supports the introduction of potential responses (something that can not be performed with a purely probabilistic DAG): . Indeed, we could replace with the pair , and the function with the “look-up” function , where . Then, and are all functions of , and thus have a joint distribution entirely determined by that of . And, given this joint distribution, we can compute PC in (8). Likewise, given a more general SCM, we can compute answers to CoE questions.
It would seem then that this approach bypasses the difficulties alluded to above. This, however, is illusory, since such a solution is available only when we have access to a fully specified SCM. As discussed in Section 2.4 and Section 6.1, there will be many distinct SPMs or SCMs consistent with a given probabilistic or augmented DAG model for the domain variables. Since the probabilistic structure is the most that we can learn from empirical data, we will never be able to choose between these distinct SCM versions of the problem. However, different SCMs will lead to different answers to the CoE questions we put to them. Thus, for Figure 11, we have since , and this will depend on the dependence between and , as embodied in the SCM. But, because of the fundamental problem of causal inference, this dependence can never be identified from empirical data. So, different SCMs inducing the same probabilistic structure, which are entirely indistinguishable empirically, will lead to different answers. When we allow for all possible such SCMs, we are led back to the interval bounds for PC discussed above.
8. Discussion
We have surveyed a variety of directed graphical models, with varying syntax (including or omitting error variables or regime indicators) and semantics (formal or informal, modelling probabilistic or causal situations). Different semantics are relevant to different rungs of the ladder of causation.
When presented with a simple DAG, it may not be obvious how it is supposed to be interpreted, and there is an ever-present danger of misinterpretation or of slipping too easily from one interpretation (e.g., purely probabilistic) to another (e.g., causal). This can largely be avoided by always using a simple DAG to model a probabilistic problem (on the first rung of the ladder) and an augmented DAG to model a causal problem (on the second rung). In both cases, the moralisation procedure provides the semantics whereby interpretive properties can be read off the graph.
DAGs such as SCMs that involve, explicitly or implicitly, error variables and functional relationships can be used on all three rungs of the ladder. However, they cannot be identified empirically. For rungs one and two, this is unimportant, and all equivalent versions inducing the same underlying purely probabilistic DAG will yield the same answers as obtainable from that underlying DAG. For rung three, which addresses the probability of causation in an individual instance, only an approach based on SCMs is available. However, different but empirically indistinguishable SCMs now deliver different answers to the same causal question. Taking this into account, we may have to be satisfied with an interval bound on the desired, but unidentifiable, probability of causation.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Pearl, J. Probabilistic Reasoning in Intelligent Systems; Morgan Kaufmann Publishers: San Mateo, CA, USA, 1988. [Google Scholar]
- Lauritzen, S.L. Graphical Models; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Cowell, R.G.; Dawid, A.P.; Lauritzen, S.L.; Spiegelhalter, D.J. Probabilistic Networks and Expert Systems; Springer: New York, NY, USA, 1999. [Google Scholar]
- Pearl, J. Causality: Models, Reasoning and Inference, 2nd ed.; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Dawid, A.P.; Evett, I.W. Using a Graphical Method to Assist the Evaluation of Complicated Patterns of Evidence. J. Forensic Sci. 1997, 42, 226–231. [Google Scholar]
- Dawid, A.P. Influence Diagrams for Causal Modelling and Inference. Int. Stat. Rev. 2002, 70, 161–189. [Google Scholar] [CrossRef]
- Dawid, A.P. Causal Inference Using Influence Diagrams: The Problem of Partial Compliance (with Discussion). In Highly Structured Stochastic Systems; Green, P.J., Hjort, N.L., Richardson, S., Eds.; Oxford University Press: Oxford, UK, 2003; pp. 45–81. [Google Scholar]
- Dawid, A.P. Beware of the DAG! Proc. Mach. Learn. Res. 2010, 6, 59–86. Available online: https://proceedings.mlr.press/v6/dawid10a.html (accessed on 18 February 2024).
- Dawid, A.P. Seeing and Doing: The Pearlian Synthesis. In Heuristics, Probability and Causality: A Tribute to Judea Pearl; Dechter, R., Geffner, H., Halpern, J.Y., Eds.; College Publications: London, UK, 2010; pp. 309–325. [Google Scholar]
- Dawid, A.P.; Didelez, V. Identifying the Consequences of Dynamic Treatment Strategies: A Decision-Theoretic Overview. Stat. Surv. 2010, 4, 184–231. [Google Scholar] [CrossRef]
- Geneletti, S.G.; Dawid, A.P. Defining and Identifying the Effect of Treatment on the Treated. In Causality in the Sciences; Illari, P.M., Russo, F., Williamson, J., Eds.; Oxford University Press: Oxford, UK, 2011; pp. 728–749. [Google Scholar]
- Dawid, A.P. Statistical Causality from a Decision-Theoretic Perspective. Annu. Rev. Stat. Its Appl. 2015, 2, 273–303. [Google Scholar] [CrossRef]
- Dawid, A.P.; Musio, M.; Murtas, R. The Probability of Causation. Law Probab. Risk 2017, 16, 163–179. [Google Scholar] [CrossRef]
- Constantinou, P.; Dawid, A.P. Extended Conditional Independence and Applications in Causal Inference. Ann. Stat. 2017, 45, 2618–2653. [Google Scholar] [CrossRef]
- Dawid, A.P. Decision-Theoretic Foundations for Statistical Causality. J. Causal Inference 2021, 9, 39–77. [Google Scholar] [CrossRef]
- Dawid, A.P. The Tale Wags the DAG. In Probabilistic and Causal Inference: The Works of Judea Pearl; Dechter, R., Geffner, H., Halpern, J.Y., Eds.; Association for Computing Machinery and Morgan & Claypool: New York, NY, USA, 2022; Chapter 28; pp. 557–574. [Google Scholar] [CrossRef]
- Dawid, A.P.; Musio, M. Effects of Causes and Causes of Effects. Annu. Rev. Stat. Its Appl. 2022, 9, 261–287. [Google Scholar] [CrossRef]
- Dawid, A.P.; Humphreys, M.; Musio, M. Bounding Causes of Effects with Mediators. Sociol. Methods Res. 2024, 53, 28–56. [Google Scholar] [CrossRef]
- Pearl, J.; Mackenzie, D. The Book of Why; Basic Books: New York, NY, USA, 2018. [Google Scholar]
- Pearl, J. A Constraint–Propagation Approach to Probabilistic Reasoning. Mach. Intell. Pattern Recognit. 1986, 4, 357–369. [Google Scholar]
- Verma, T.; Pearl, J. Causal Networks: Semantics and Expressiveness. Mach. Intell. Pattern Recognit. 1990, 9, 69–76. [Google Scholar]
- Lauritzen, S.L.; Dawid, A.P.; Larsen, B.N.; Leimer, H.G. Independence Properties of Directed Markov Fields. Networks 1990, 20, 491–505. [Google Scholar] [CrossRef]
- Dawid, A.P. Conditional Independence in Statistical Theory (with Discussion). J. R. Stat. Soc. Ser. B 1979, 41, 1–31. [Google Scholar]
- Frydenberg, M. The Chain Graph Markov Property. Scand. J. Stat. 1990, 17, 333–353. [Google Scholar]
- Verma, T.; Pearl, J. Equivalence and Synthesis of Causal Models. In Uncertainty in Artificial Intelligence 6; Bonissone, P.P., Henrion, M., Kanal, L.N., Lemmer, J.F., Eds.; ACM Digital Library: Amsterdam, The Netherlands, 1991; pp. 255–268. [Google Scholar]
- Korzybski, A. Science and Sanity: An Introduction to Non-Aristotelian Systems and General Semantics; International Non-Aristotelian Library Publishing Compan: Lancaster, PA, USA, 1933. [Google Scholar]
- Hernán, M.A.; Robins, J.M. Instruments for Causal Inference: An Epidemiologist’s Dream? Epidemiology 2006, 17, 360–372. [Google Scholar] [CrossRef] [PubMed]
- Dawid, A.P. Conditional Independence for Statistical Operations. Ann. Stat. 1980, 8, 598–617. [Google Scholar] [CrossRef]
- Holland, P.W. Statistics and Causal Inference (with Discussion). J. Am. Stat. Assoc. 1986, 81, 945–970. [Google Scholar] [CrossRef]
- Dawid, A.P. Counterfactuals, Hypotheticals and Potential Responses: A Philosophical Examination of Statistical Causality. In Causality and Probability in the Sciences; Russo, F., Williamson, J., Eds.; Texts in Philosophy; College Publications: London, UK, 2007; Volume 5, pp. 503–532. [Google Scholar]
- Rubin, D.B. Estimating Causal Effects of Treatments in Randomized and Nonrandomized Studies. J. Educ. Psychol. 1974, 66, 688–701. [Google Scholar] [CrossRef]
- Rubin, D.B. Bayesian Inference for Causal Effects: The Rôle of Randomization. Ann. Stat. 1978, 6, 34–68. [Google Scholar] [CrossRef]
- Dawid, A.P.; Musio, M. What Can Group Level Data Tell Us About Individual Causality? In Statistics in the Public Interest: In Memory of Stephen E. Fienberg; Carriquiry, A., Tanur, J., Eddy, W., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 235–256. [Google Scholar] [CrossRef]
Figure 1.
Directed acyclic graph .
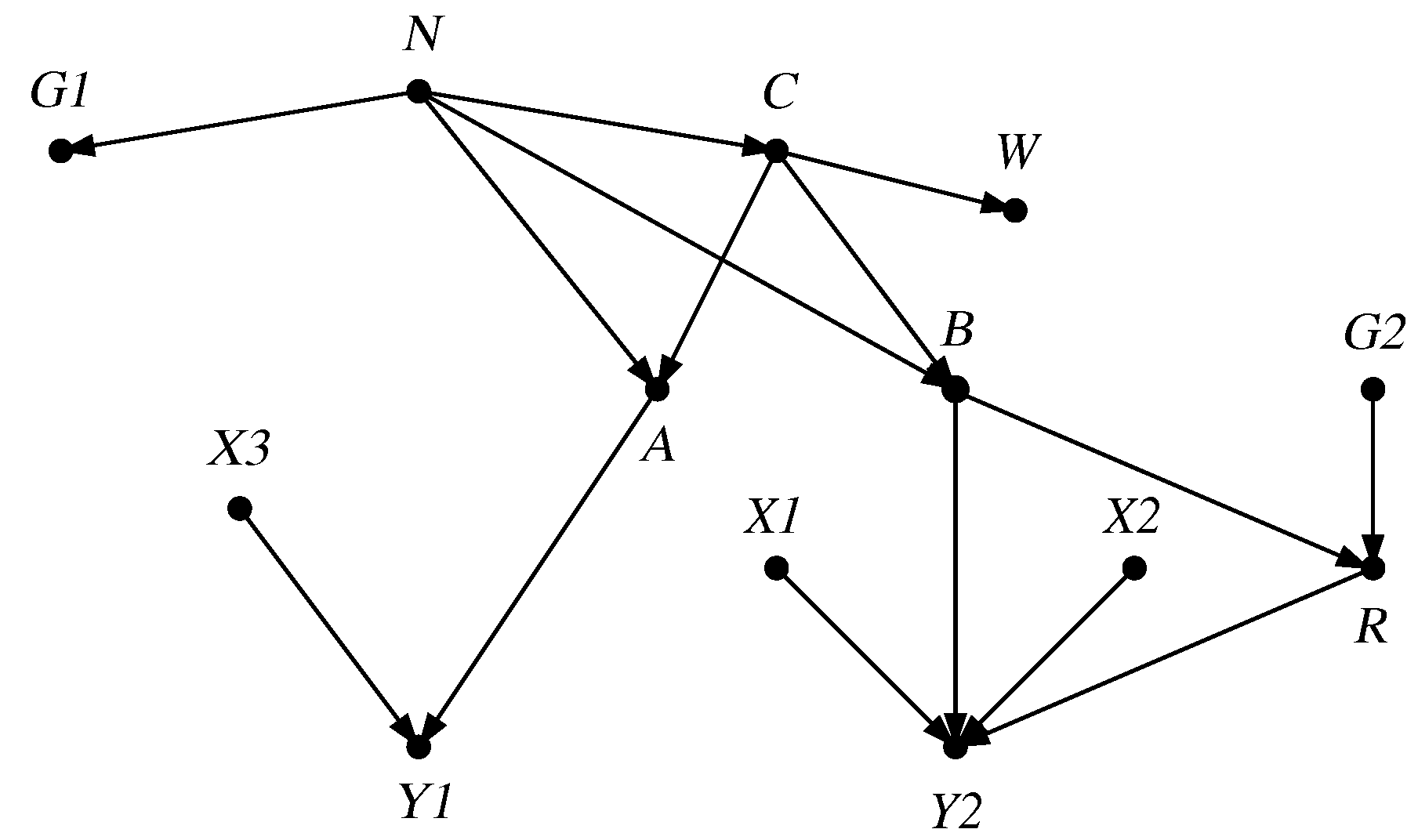
Figure 2.
Ancestral subgraph .

Figure 3.
Moralised ancestral subgraph .

Figure 4.
Instrumental variable.

Figure 5.
SPM representation of instrumental variable model.

Figure 6.
Instrumental variable: augmented DAG.

Figure 7.
Instrumental variable: augmented DAG with error variables.

Figure 8.
Instrumental variable: alternative augmented DAG.

Figure 9.
Pearlian DAG.

Figure 10.
Augmented Pearlian DAG.

Figure 11.
Simple SCM.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Dawid, P. What Is a Causal Graph? Algorithms 2024, 17, 93. https://doi.org/10.3390/a17030093
AMA Style
Dawid P. What Is a Causal Graph? Algorithms. 2024; 17(3):93. https://doi.org/10.3390/a17030093
Chicago/Turabian StyleDawid, Philip. 2024. "What Is a Causal Graph?" Algorithms 17, no. 3: 93. https://doi.org/10.3390/a17030093
APA StyleDawid, P. (2024). What Is a Causal Graph? Algorithms, 17(3), 93. https://doi.org/10.3390/a17030093
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.