
Improved Decentralized Fractional-Order Control of Higher-Order Systems Using Modified Flower Pollination Optimization


Abstract
1. Introduction
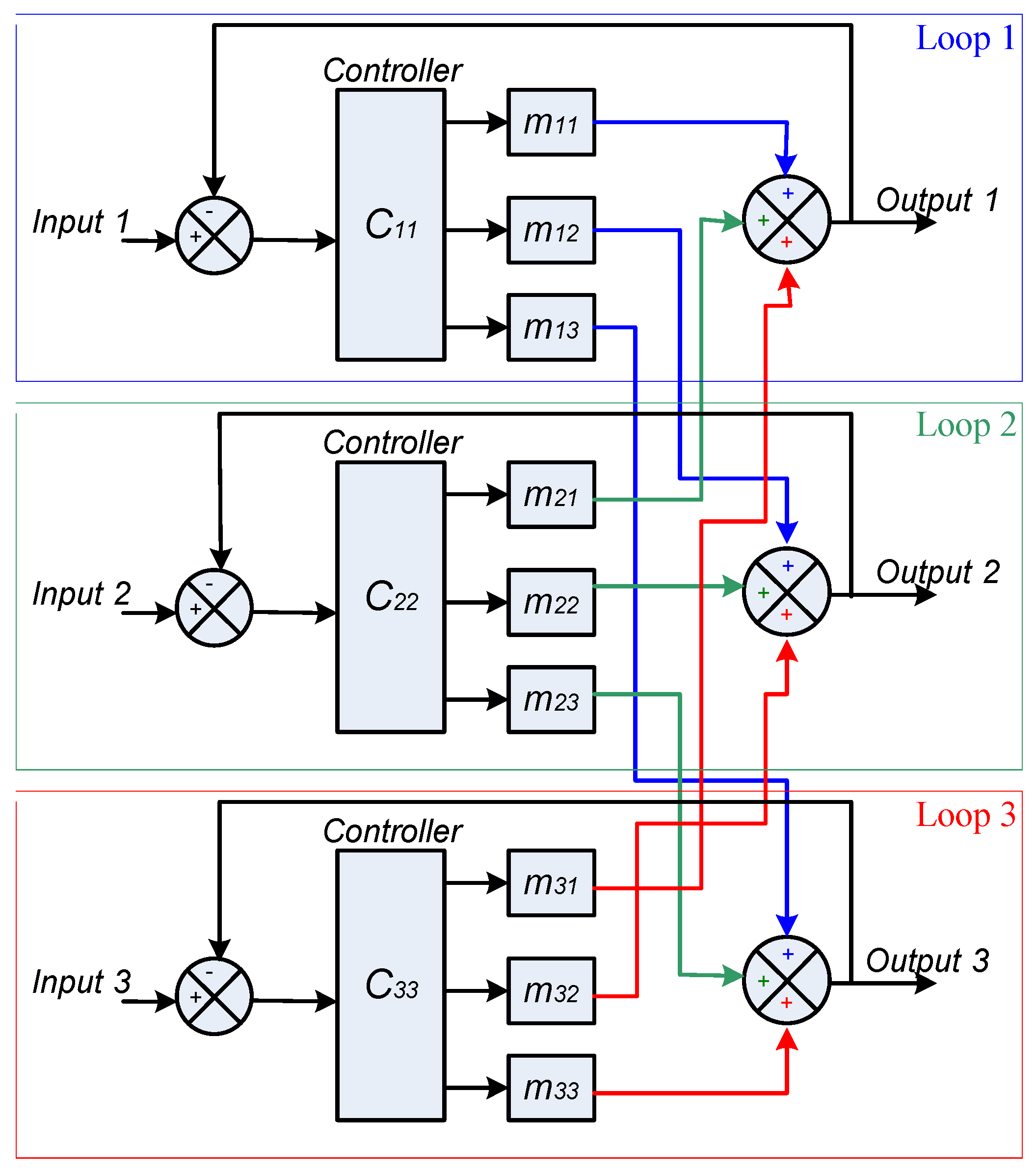
- Loop interactions and coupling effects are decreased by creating decouplers with a simplified decoupling approach;
- In order to obtain the best values of Ts, Tr, and Mp, a novel optimal FOPID controller is designed using an MFPOA method that places constraints on ITSE. This strengthens the system and improves the stability issues;
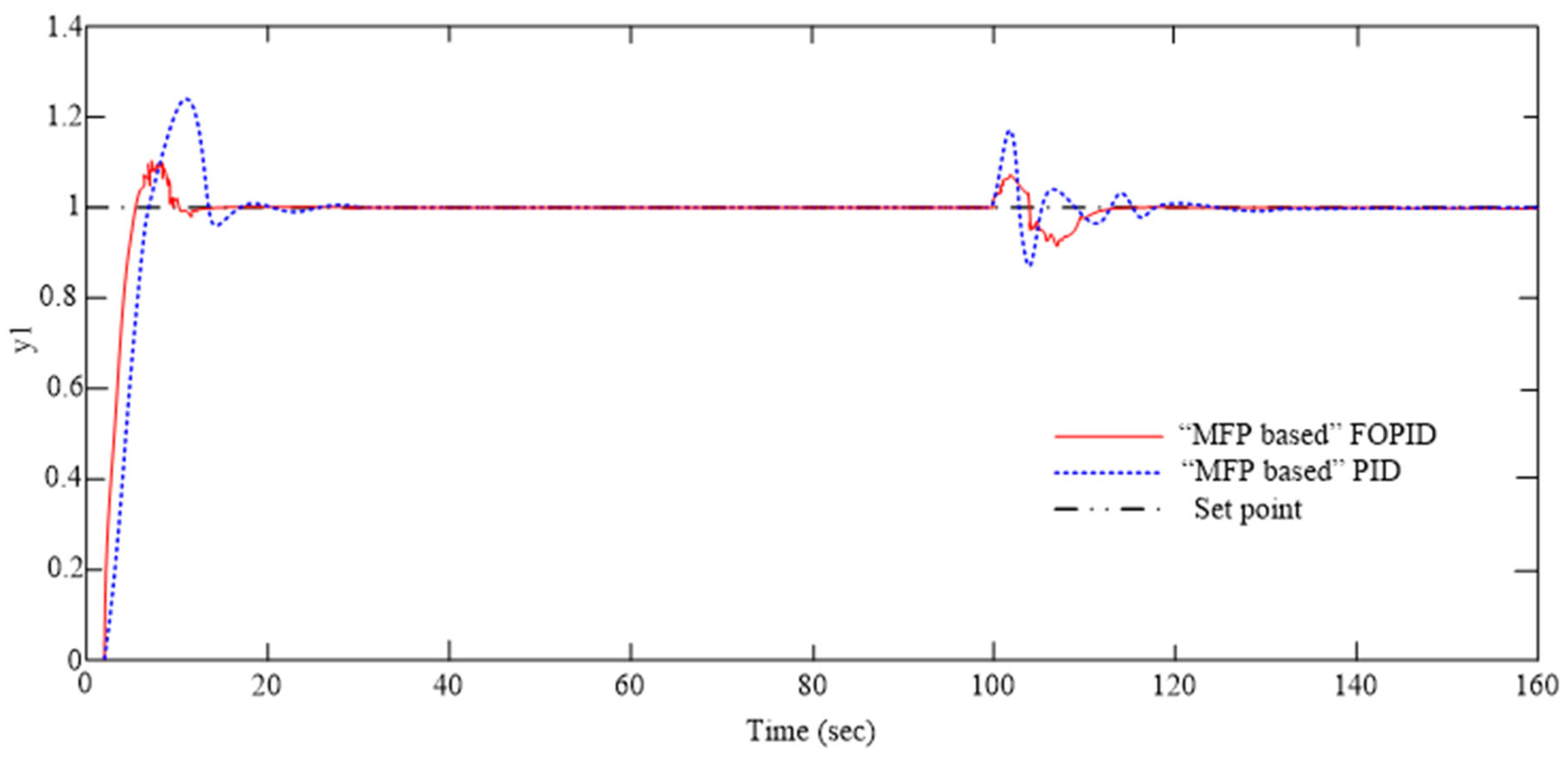
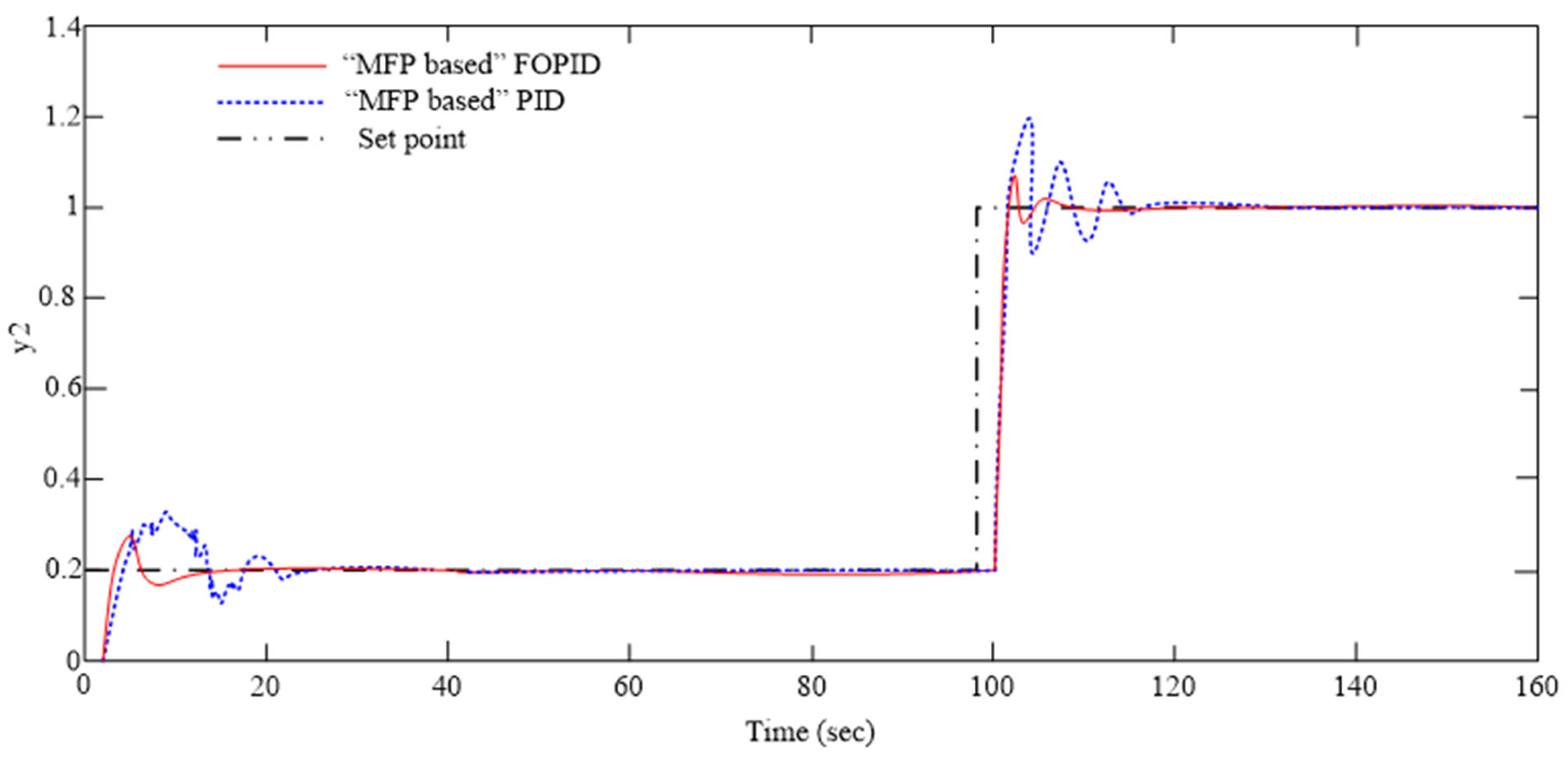
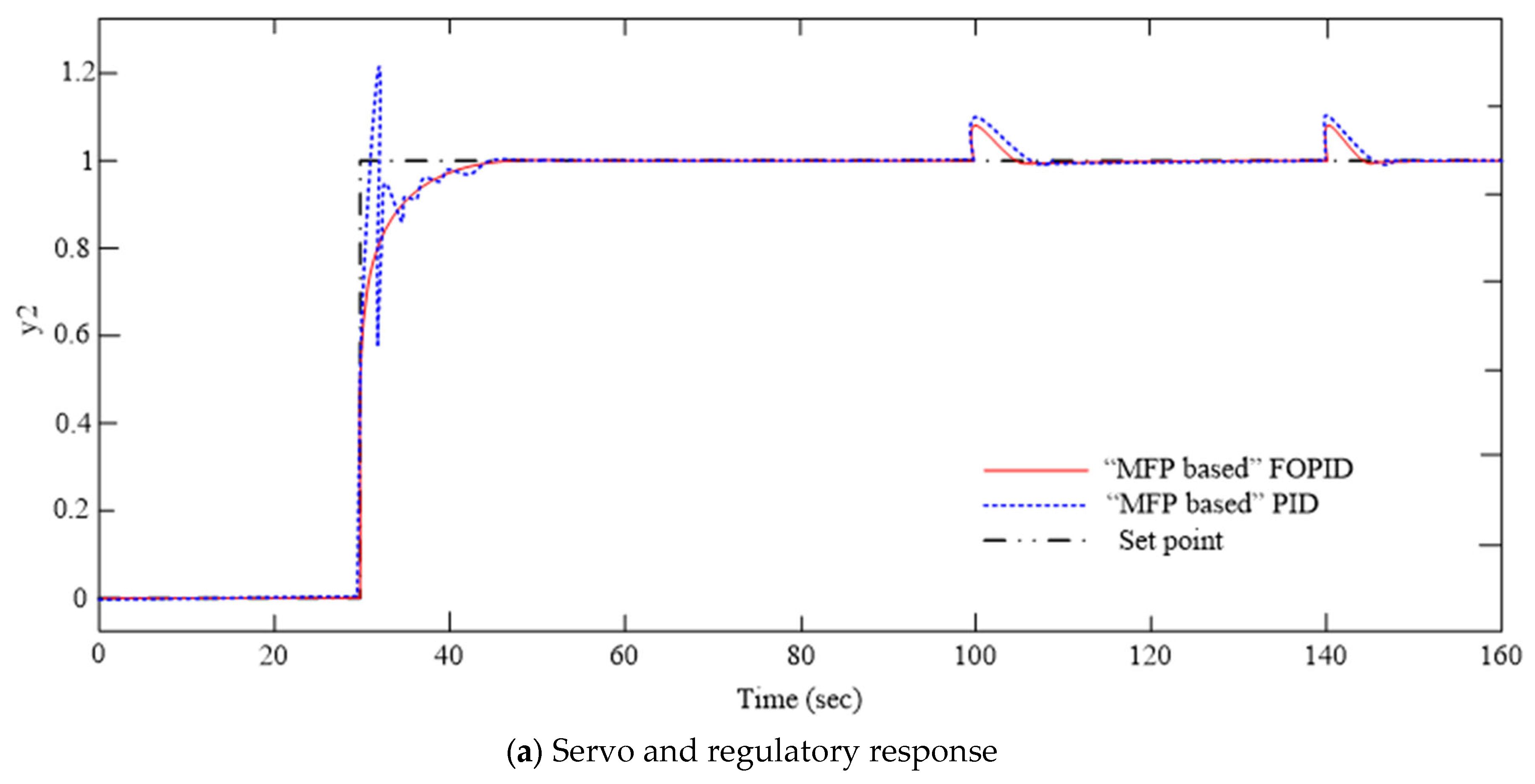
- A quantitative comparison is made between the suggested method and the traditional PID controller. The results show that the recommended controller performs better than the previously discussed approaches.
2. The Preliminary Background of the Proposed Control Method
2.1. Fractional Calculus Definitions
2.2. Stability of the Fractional-Order System
2.3. Fractional-Order PID (FOPID)
2.4. FOPID Tuning
3. Optimization Methodology
3.1. Flower Pollination Algorithm (FPA)
3.2. MFPOA
| Algorithm 1: AOG-Based MFPOA Algorithm |
| 1. Determine the pollen count using random solutions 2. Determine the ideal response from the starting population 3. Establish a switch probability of p ) 7. Create a step vector in d dimensions that follows the Levy distribution 8. Apply Equation (25) to global pollination 9. Use Equation (34) to calculate the mutation probability factor 11. Apply Equation (29) to determine fresh pollen in global pollination 12. Else 13. Equation (34) is used to calculate new pollen 14. Choose from a uniform distribution in the range [0, 1] 15. Use Equation (33) to carry out local pollination 16. Use Equation (34) to calculate the mutation probability factor 18. Apply Equation (33) to local pollination to determine fresh pollen 19. Else 20. Equation (29) is used to calculate new pollen 21. End 22. Create fresh approaches 23. If improved solutions emerge, inform the populace of them 24. End 25. Discover the current top option 26. End 27. The fitness solution is the best option |
3.3. Implementation of the MFPOA for Optimizing the FOPID Controller
3.4. Proposed Cost Function
4. Robust Stability Analysis
5. Simulation Results and Discussion
5.1. Case 1 (2 × 2) VL Column System
Stability Analysis
5.2. Case 2 (3 × 3) Shell Heavy Oil Fractionator
Stability Analysis
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Borase, R.P.; Maghade, D.K.; Sondkar, S.Y.; Pawar, S.N. A review of PID control, tuning methods and applications. Int. J. Dyn. Control 2021, 9, 818–827. [Google Scholar] [CrossRef]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Jamil, A.A.; Tu, W.F.; Ali, S.W.; Terriche, Y.; Guerrero, J.M. Fractional-order PID controllers for temperature control: A review. Energies 2022, 15, 3800. [Google Scholar] [CrossRef]
- Bingi, K.; Ibrahim, R.; Karsiti, M.N.; Hassan, S.M.; Harindran, V.R. Fractional-Order Systems and PID Controllers; Springer International Publishing: Cham, Switzerland, 2020; Volume 264. [Google Scholar]
- Xie, Y.; Tang, X.; Song, B.; Zhou, X.; Guo, Y. Model-free tuning strategy of fractional-order pi controller for speed regulation of permanent magnet synchronous motor. Trans. Inst. Meas. Control 2019, 41, 23–35. [Google Scholar] [CrossRef]
- Stanisławski, R.; Rydel, M.; Li, Z. A new reduced-order implementation of discrete-time fractional-order pid controller. IEEE Access 2022, 10, 17417–17429. [Google Scholar] [CrossRef]
- Al-Saggaf, U.M.; Mehedi, I.M.; Mansouri, R.; Bettayeb, M. Rotary flexible joint control by fractional order controllers. Int. J. Control Autom. Syst. 2017, 15, 2561–2569. [Google Scholar] [CrossRef]
- Dwivedi, P.; Pandey, S.; Junghare, A. Performance analysis and experimental validation of 2-dof fractional-order controller for underactuated rotary inverted pendulum. Arab. J. Sci. Eng. 2017, 42, 5121–5145. [Google Scholar] [CrossRef]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.A.; Hosseinnia, S.H.; Petlenkov, E.; Ates, A.; Cech, M. Towards industrialization of fopid controllers: A survey on milestones of fractional order control and pathways for future developments. IEEE Access 2021, 9, 21016–21042. [Google Scholar] [CrossRef]
- Hou, Z.; Xiong, S. On model-free adaptive control and its stability analysis. IEEE Trans. Autom. Control 2019, 64, 4555–4569. [Google Scholar] [CrossRef]
- Huang, L.; Deng, L.; Li, A.; Gao, R.; Zhang, L.; Lei, W. A novel approach for solar greenhouse air temperature and heating load prediction based on laplace transform. J. Build. Eng. 2021, 44, 102682. [Google Scholar] [CrossRef]
- Ardjal, A.; Bettayeb, M.; Mansouri, R.; Zouak, B. Design and implementation of a model-free fractional order intelligent PI fractional order sliding mode controller for water level tank system. ISA Trans. 2022, 127, 501–510. [Google Scholar] [CrossRef]
- Yakoub, Z.; Amairi, M.; Chetoui, M.; Saidi, B.; Aoun, M. Model-free adaptive fractional order control of stable linear timevarying systems. ISA Trans. 2017, 67, 193–207. [Google Scholar] [CrossRef] [PubMed]
- Ibraheem, G.A.R.; Azar, A.T.; Ibraheem, I.K.; Humaidi, A.J. A novel design of a neural network-based fractional pid controller for mobile robots using hybridized fruit fly and particle swarm optimization. Complexity 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Norsahperi, N.; Danapalasingam, K. Particle swarm-based and neuro-based fopid controllers for a twin rotor system with improved tracking performance and energy reduction. ISA Trans. 2020, 102, 230–244. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Sinha, N. Voltage stability of solar dish-stirling based autonomous dc microgrid using grey wolf optimised fopidcontroller. Int. J. Sustain. Energy 2021, 40, 412–429. [Google Scholar] [CrossRef]
- Rais, M.C.; Dekhandji, F.Z.; Recioui, A.; Rechid, M.S.; Djedi, L. Comparative study of optimization techniques based pid tuning for automatic voltage regulator system. Eng. Proc. 2022, 14, 21. [Google Scholar]
- Mughees, A.; Mohsin, S.A. Design and control of magnetic levitation system by optimizing fractional order pid controller using ant colony optimization algorithm. IEEE Access 2020, 8, 116704–116723. [Google Scholar] [CrossRef]
- Łapa, K. Elastic FOPID+ FIR Controller Design Using Hybrid Population-Based Algorithm. In Information Systems Architecture and Technology: Proceedings of 37th International Conference on Information Systems Architecture and Technology–ISAT 2016–Part II; Springer International Publishing: Cham, Switzerland, 2017; pp. 15–26. [Google Scholar]
- Moafi, M.; Marzband, M.; Savaghebi, M.; Guerrero, J.M. Energy management system based on fuzzy fractional order PID controller for transient stability improvement in microgrids with energy storage. Int. Trans. Electr. Energy Syst. 2016, 26, 2087–2106. [Google Scholar] [CrossRef]
- Zamani, M.; Karimi-Ghartemani, M.; Sadati, N.; Parniani, M. Design of a fractional order PID controller for an AVR using particle swarm optimization. Control Eng. Pract. 2009, 17, 1380–1387. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J. Fractional-order PID controller tuning based on genetic algorithm. In Proceedings of the 2011 International Conference on Business Management and Electronic Information, Guangzhou, China, 13–15 May 2011; Volume 3, pp. 764–767. [Google Scholar]
- Lazim, D.; Zain, A.M.; Bahari, M.; Omar, A.H. Review of modified and hybrid flower pollination algorithms for solving optimization problems. Artif. Intell. Rev. 2019, 52, 1547–1577. [Google Scholar] [CrossRef]
- Nabil, E. A modified flower pollination algorithm for global optimization. Expert. Syst. Appl. 2016, 57, 192–203. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Saber, S.; Askar, S.S.; Abouhawwash, M. Modified flower pollination algorithm for global optimization. Mathematics 2021, 9, 1661. [Google Scholar] [CrossRef]
- Rajeswari, C.; Santhi, M. Modified flower pollination algorithm for optimizing FOPID controller and its application with the programmable n-level inverter using fuzzy logic. Soft Comput. 2021, 25, 2615–2633. [Google Scholar] [CrossRef]
- Govind, K.A.; Mahapatra, S.; Mahapatro, S.R. A Comparative Analysis of Various Decoupling Techniques Using Frequency Domain Specifications. In Proceedings of the 2023 3rd International Conference on Artificial Intelligence and Signal Processing (AISP), Vijayawada, India, 18–20 March 2023; pp. 1–6. [Google Scholar]
- Rajapandiyan, C.; Chidambaram, M. Controller design for MIMO processes based on simple decoupled equivalent transfer functions and simplified decoupler. Ind. Eng. Chem. Res. 2012, 51, 12398–12410. [Google Scholar] [CrossRef]
- Wang, Q.G.; Ye, Z.; Cai, W.J.; Hang, C.C. PID Control for Multivariable Processes; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Abdeljawad, T. On Riemann and Caputo fractional differences. Comput. Math. Appl. 2011, 62, 1602–1611. [Google Scholar] [CrossRef]
- Li, C.; Qian, D.; Chen, Y. On Riemann-Liouville and caputo derivatives. Discret. Dyn. Nat. Soc. 2011, 2011, 562494. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, B. Comparative study of Riemann–Liouville and Caputo derivative definitions in time-domain analysis of fractional-order capacitor. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 2184–2188. [Google Scholar] [CrossRef]
- Garrappa, R. A Grunwald–Letnikov scheme for fractional operators of Havriliak–Negami type. Math. Comput. Sci. Eng. Ser. 2014, 34, 70–76. [Google Scholar]
- Bingul, Z.; Karahan, O. Comparison of PID and FOPID controllers tuned by PSO and ABC algorithms for unstable and integrating systems with time delay. Optim. Control Appl. Methods 2018, 39, 1431–1450. [Google Scholar] [CrossRef]
- Baranowski, J.; Bauer, W.; Zagórowska, M.; Dziwiński, T.; Piątek, P. Time-domain oustaloup approximation. In Proceedings of the 2015 20th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 24–27 August 2015; pp. 116–120. [Google Scholar]
- Oprzędkiewicz, K.; Mitkowski, W.; Gawin, E. An estimation of accuracy of Oustaloup approximation. In Challenges in Automation, Robotics and Measurement Techniques; Springer International Publishing: Cham, Switzerland, 2016; pp. 299–307. [Google Scholar]
- Gao, Z.; Liao, X. Improved Oustaloup approximation of fractional-order operators using adaptive chaotic particle swarm optimization. J. Syst. Eng. Electron. 2012, 23, 145–153. [Google Scholar] [CrossRef]
- Matignon, D. Stability results for fractional differential equations with applications to control processing. In Proceedings of the Symposium on Modelling, Analysis and Simulation: CESA’96 IMACS Multiconference, Computational Engineering in Systems Applications, Lille, France, 9–12 July 1996; Volume 2, No. 1. pp. 963–968. [Google Scholar]
- Zhang, Y.; Lin, P.; Sun, W. Nonlinear control and circuit implementation in coupled nonidentical fractional-order chaotic systems. Fractal Fract. 2022, 6, 428. [Google Scholar] [CrossRef]
- Dastjerdi, A.A.; Saikumar, N.; HosseinNia, S.H. Tuning guidelines for fractional order PID controllers: Rules of thumb. Mechatronics 2018, 56, 26–36. [Google Scholar] [CrossRef]
- Muresan, C.I.; Birs, I.; Ionescu, C.; Dulf, E.H.; De Keyser, R. A review of recent developments in autotuning methods for fractional-order controllers. Fractal Fract. 2022, 6, 37. [Google Scholar] [CrossRef]
- Li, B.; Zhao, X.; Liu, Y.; Zhao, X. Robust H∞ control of fractional-order switched systems with order 0 < α< 1 and uncertainty. Fractal Fract. 2022, 6, 164. [Google Scholar]
- Nassef, A.M.; Abdelkareem, M.A.; Maghrabie, H.M.; Baroutaji, A. Metaheuristic-Based Algorithms for Optimizing Fractional-Order Controllers—A Recent, Systematic, and Comprehensive Review. Fractal Fract. 2023, 7, 553. [Google Scholar] [CrossRef]
- Yang, X.S. Flower pollination algorithm for global optimization. In Proceedings of the International Conference on Unconventional Computing and Natural Computation, Orléans, France, 3–7 September 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 240–249. [Google Scholar]
- Yang, X.S.; Karamanoglu, M.; He, X. Flower pollination algorithm: A novel approach for multiobjective optimization. Eng. Optim. 2014, 46, 1222–1237. [Google Scholar] [CrossRef]
- Pavlyukevich, I. Lévy flights, non-local search and simulated annealing. J. Comput. Phys. 2007, 226, 1830–1844. [Google Scholar] [CrossRef]
- Mantegna, R.N. Fast, accurate algorithm for numerical simulation of Levy stable stochastic processes. Phys. Rev. E 1994, 49, 4677. [Google Scholar] [CrossRef]
- Hamza, M.F. Modified Flower Pollination Optimization Based Design of Interval Type-2 Fuzzy PID Controller for Rotary Inverted Pendulum System. Axioms 2023, 12, 586. [Google Scholar] [CrossRef]
- Nasirpour, N.; Balochian, S. Optimal design of fractional-order PID controllers for multi-input multi-output (variable air volume) air-conditioning system using particle swarm optimization. Intell. Build. Int. 2017, 9, 107–119. [Google Scholar] [CrossRef]
- Hoffman, J.D.; Frankel, S. Numerical Methods for Engineers and Scientists; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Besta, C.S.; Chidambaram, M. Tuning of multivariable PI controllers by BLT method for TITO systems. Chem. Eng. Commun. 2016, 203, 527–538. [Google Scholar] [CrossRef]
- Vu TN, L.; Lee, M. Multi-loop PI controller design based on the direct synthesis for interacting multi-time delay processes. ISA Trans. 2010, 49, 79–86. [Google Scholar]
- Lakshmanaprabu, S.K.; Elhoseny, M.; Shankar, K. Optimal tuning of decentralized fractional order PID controllers for TITO process using equivalent transfer function. Cogn. Syst. Res. 2019, 58, 292–303. [Google Scholar] [CrossRef]
- Prett, D.M.; García, C.E.; Ramaker, B.L. The Second Shell Process Control Workshop: Solutions to the Shell Standard Control Problem; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Lawal, S.A.; Zhang, J. Actuator fault monitoring and fault tolerant control in distillation columns. Int. J. Autom. Comput. 2017, 14, 80–92. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Population size (n) | 50 |
| Probability of switching (p) | 0.8 |
| Number of iterations | 100 |
| Number of variables | 5 |
| ] | 40, 20, 20, 1, 1 |
| Minimum limits [] | 0, 0, 0, 0, 0 |
| 2.5 |
| Loop | Controller | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| MFPOA-based FOPID | 36.81 | 5.69 | 16.62 | 1 | 0.0281 | 0 | 0.0399 | 0.0756 | |
| MFPOA-based PID | 38.67 | 3.48 | 10.12 | - | - | 0 | 0.087 | 0.25 | |
| MFPOA-based FOPID | 37.92 | 17.60 | 19.51 | 0.212 | 0.167 | 0 | 0.0020 | 0.0068 | |
| MFPOA-based PID | 36.34 | 37.31 | 0.62 | - | - | 1.1632 | 0.0053 | 0.0081 |
| Loop | Controller | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| MFPOA-based FOPID | 32.76 | 5.06 | 15.96 | 1 | 0.032 | 0 | 0.0048 | 0.0839 | |
| MFPOA-based PID | 34.42 | 3.10 | 9.72 | - | - | 0 | 0.0104 | 0.2775 | |
| MFPOA-based FOPID | 34.90 | 11.08 | 16.81 | 0.89 | 0.113 | 0 | 0.0025 | 0.0457 | |
| MFPOA-based PID | 31.03 | 18.97 | 5.16 | - | - | 0.9604 | 0.0055 | 0.1433 | |
| MFPOA-based FOPID | 33.75 | 15.66 | 18.73 | 0.25 | 0.192 | 0 | 0.0002 | 0.0075 | |
| MFPOA-based PID | 32.34 | 33.21 | 0.60 | - | - | 1.1399 | 0.0006 | 0.0090 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamza, M.F. Improved Decentralized Fractional-Order Control of Higher-Order Systems Using Modified Flower Pollination Optimization. Algorithms 2024, 17, 94. https://doi.org/10.3390/a17030094
Hamza MF. Improved Decentralized Fractional-Order Control of Higher-Order Systems Using Modified Flower Pollination Optimization. Algorithms. 2024; 17(3):94. https://doi.org/10.3390/a17030094
Chicago/Turabian StyleHamza, Mukhtar Fatihu. 2024. "Improved Decentralized Fractional-Order Control of Higher-Order Systems Using Modified Flower Pollination Optimization" Algorithms 17, no. 3: 94. https://doi.org/10.3390/a17030094
APA StyleHamza, M. F. (2024). Improved Decentralized Fractional-Order Control of Higher-Order Systems Using Modified Flower Pollination Optimization. Algorithms, 17(3), 94. https://doi.org/10.3390/a17030094