2.3.1. Problem Definition
Let be a vector of reference influences for the output variables of System (2) , which determines the reference trajectory of the wheeled robot at a time interval ; namely, it specifies in the stationary Cartesian coordinate system the track path as well as the motion velocity acceleration , etc. The problems of starting, stopping the vehicle, and reaching a reference point of a reference trajectory with a reference orientation are not considered in this paper. It is assumed that the interval corresponds to a continuous motion of the robot without stops, and the time of staying on the route is acceptable. Under the made assumptions, we can introduce the notation with the velocity vector , which coincides with the center line of the platform, directed tangentially to the reference trajectory. Under the assumptions made, we can introduce the notations with and the velocity vector , which coincides with the center line of the platform, directed tangentially to the reference trajectory.
Let us highlight the main problems that need to be comprehensively considered when defining a trajectory for a single-wheeled robot:
The path must be implementable by a mechanical plant, i.e., it must be sufficiently smooth and have continuous curvature, minimum requirements
In addition, the reference motion velocity and the acceleration and jerk must not exceed the robot’s constraint values (4), i.e.,
- 2.
The path must be safe and not lead to collisions with fixed and dynamic obstacles. It is therefore necessary to consider the dimensions of the vehicle, the configuration of the polygon, etc.
- 3.
A reference trajectory must satisfy various criteria, which, depending on the robot’s mission and work scenario, are formulated as various terminal and optimization problems. For example, to reach the end point of the route in minimum time, to create the shortest route by avoiding reference points, to perform a task with minimum energy consumption, to solve pursuit or evasion problems, etc.
In the following subsubsections of this section, the first problem is discussed in various formulations, and the second problem in terms of vehicle dimensions in planning a polygon with stationary obstacles. The third problem is beyond the framework of this research and is not considered here.
2.3.2. Designing a Three-Block Tracking Differentiator
Let the reference influences
enter the information and control the on-board system of the robot in real time in the form of a deterministic vector signal. Their analytical description is unknown, and hence, the current values of reference signal derivatives are also unknown. It is assumed that the reference trajectory satisfies the safety requirements, but its realizable conditions (15) and (16) are partially fulfilled. Namely, the time functions
are either continuous but non-smooth or piecewise continuous. On the continuity intervals, the derivatives of these functions do not exceed the allowed values (16). The number of special points (junctions or points of the discontinuity of the first kind) is bounded. At these points, there exist bounded left and right first derivatives. Within the framework of the method used, an additional condition of type (14) is introduced:
In real time, the problems of smoothing the vector signal t and restoring its first and second derivatives are posed considering the constraints of the robot under consideration (4). To solve these problems, we propose using a dynamic model (tracking differentiator), which has a canonical form similar to (2):
where
are vector variables of the differentiator, which are analogs of the robot position
its velocity
, and its acceleration
, respectively. The analogs of the controls
of the canonical system (2) are the corrective sigmoidal influences
, by means of which it is necessary to ensure that the output variables of the differentiator
track the external non-smooth signals
with some accuracy. Tracking accuracy depends on the constraints of a particular robot (4), which need to be ensured in the closed-loop system (18) by choosing the gains of corrective influences:
Under these conditions, the differentiator variables (18) generate the achievable trajectory in signal form and its first and second derivatives. These variables are new reference influences and are used to generate control influences in the tracking system of the mobile robot.
To design a tracking differentiator (18) with the indicated features by means of non-generated replacement of variables, we proceed to a new coordinate frame, which is formed by the tracking errors and sigmoidal local connections:
where
Let us also introduce a sigmoidal corrective influence
where
, and note the closed-loop system
where similarly to (12),
The tracking problem is transformed into the problem of stabilization of the virtual system (22), considering the constraints (19). Let us first formulate sufficient conditions of the boundedness of solutions of the system (22) without considering (19). To simplify the setting, let us establish the following initial conditions in the tracking differentiator (18):
which by virtue of
, will ensure zero initial conditions for the state variables in the virtual system (22):
As we see, the structure of Equation (22) is similar to the structure of the closed-loop system (9). We can treat all terms on the right side of each equation, except for the sigmoidal ones, as external bounded disturbances. While analyzing the system (22), let us take as a base the proof of lemma 1. By virtue of (24), the variables of the system (22) are in domains similar to (10) from the beginning at
:
Sufficient conditions under which inequalities (25) will be correct at
, similarly to (14), have the form
Then, for the derivatives of
and, consequently, for Equation (23), similarly to (12), we obtain the estimations
Considering (17), (25), (27), the inequalities (26) take the form
In Equation (28) are sufficient conditions under which inequalities (25) will be fulfilled at .
Now, let us introduce constraints on the state variables of the tracking differentiator (18), its corrective influences, and the rate of their change. Considering (25) and the inverse Equation (20), namely
we obtain a system of dual inequalities.
By virtue of a priori assumptions, namely the lower inequalities (4), considering (14), we assume the system (29) to be joint. It has infinitely many solutions.
Under the assumption of non-smoothness of the external signal
the accuracy of stabilization of the variables
(25) is not important. The tracking error at special points is bounded
In the steady-state mode, we have an estimate similar to (11):
To minimize the steady-state tracking error (30), an iterative procedure for setting the gains of sigmoid functions based on the system of inequalities (29) is required. For example, the following variant is proposed:
where
are very small positive constants that are introduced so that the left inequalities in the system (29) remain strict. This procedure allows us to accept the maximum possible value of
However, in general, this does not provide an absolute minimum of the tracking error estimate (30). If necessary, this figure can be improved by decreasing
and increasing
.
As a result, the tracking differentiator (18) with the corrective influence (21) will be realized as a closed-loop system
The dynamic smoothing algorithm (32) along with the gains setting (31) has two universal features. First, it can be used for all wheeled robots whose dynamic model is flat and represented in the form of (2). The peculiarities and constraints of a particular vehicle will be considered when the corresponding constants are substituted into the Equation (31). The values of the corresponding gains are calculated at the preparatory stage. They do not depend on the features of the external signal and remain unchanged.
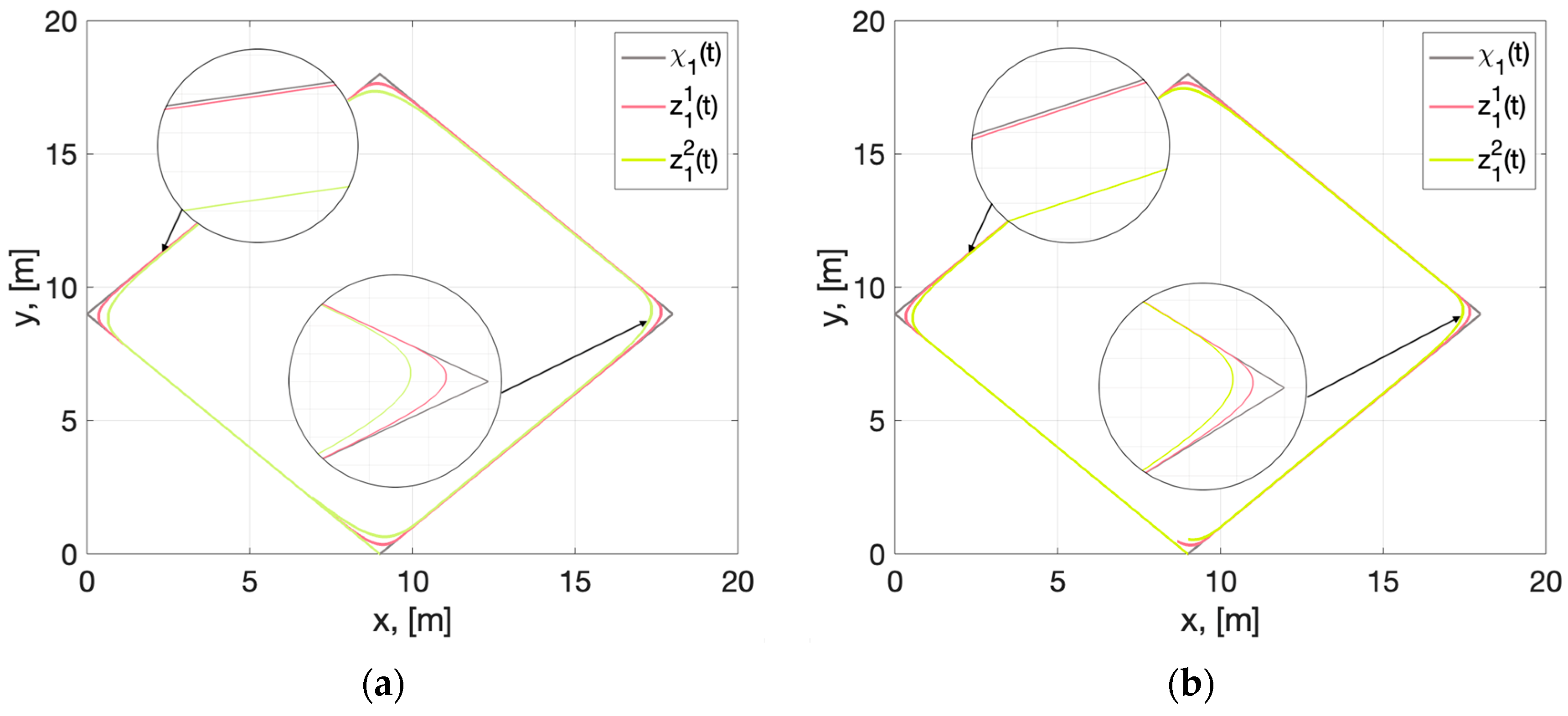
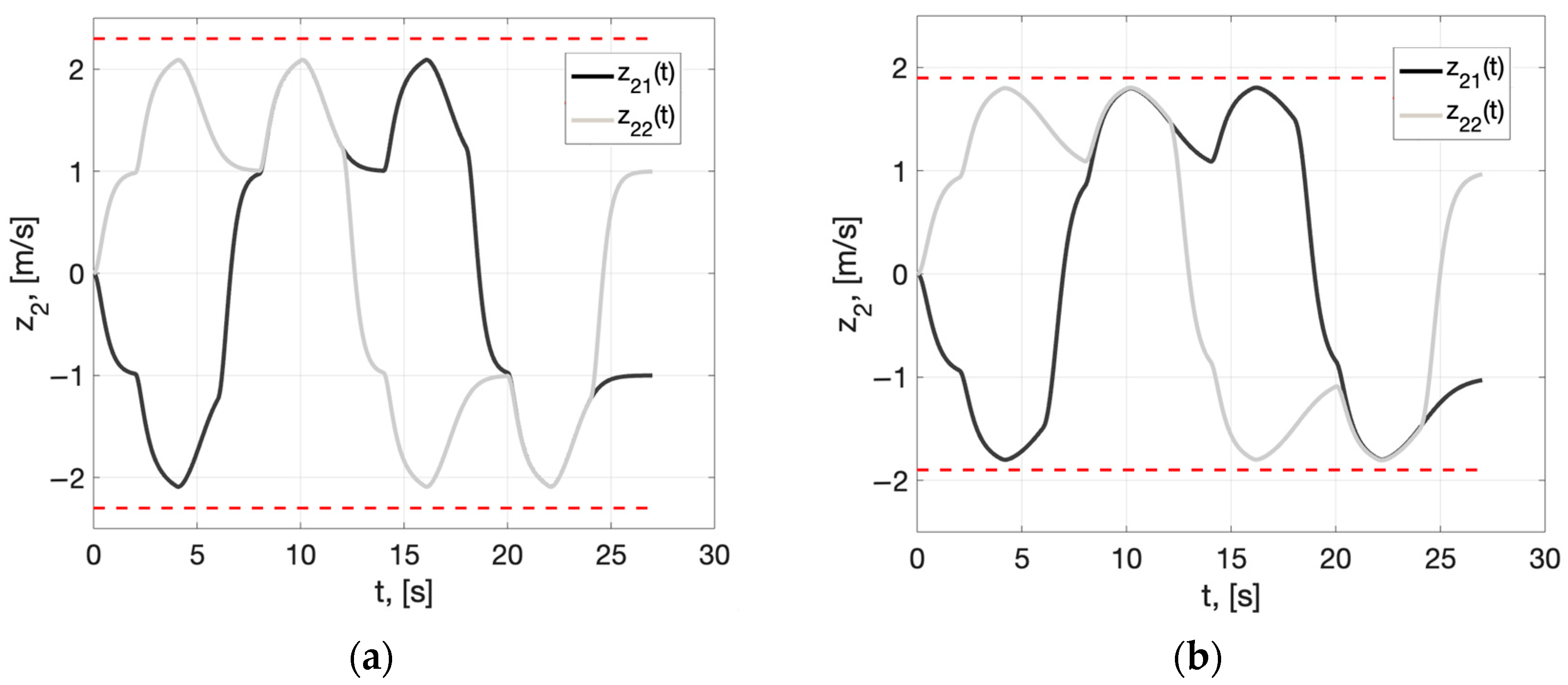
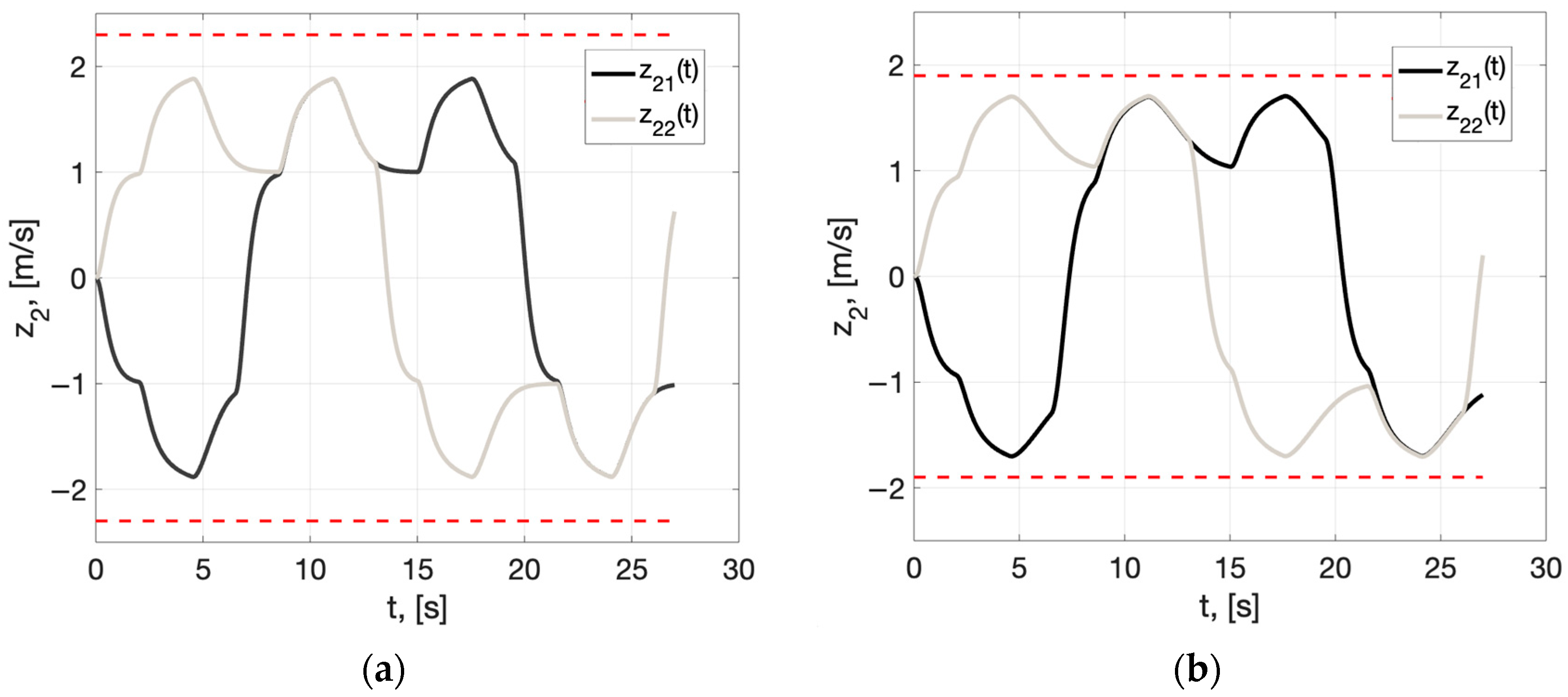
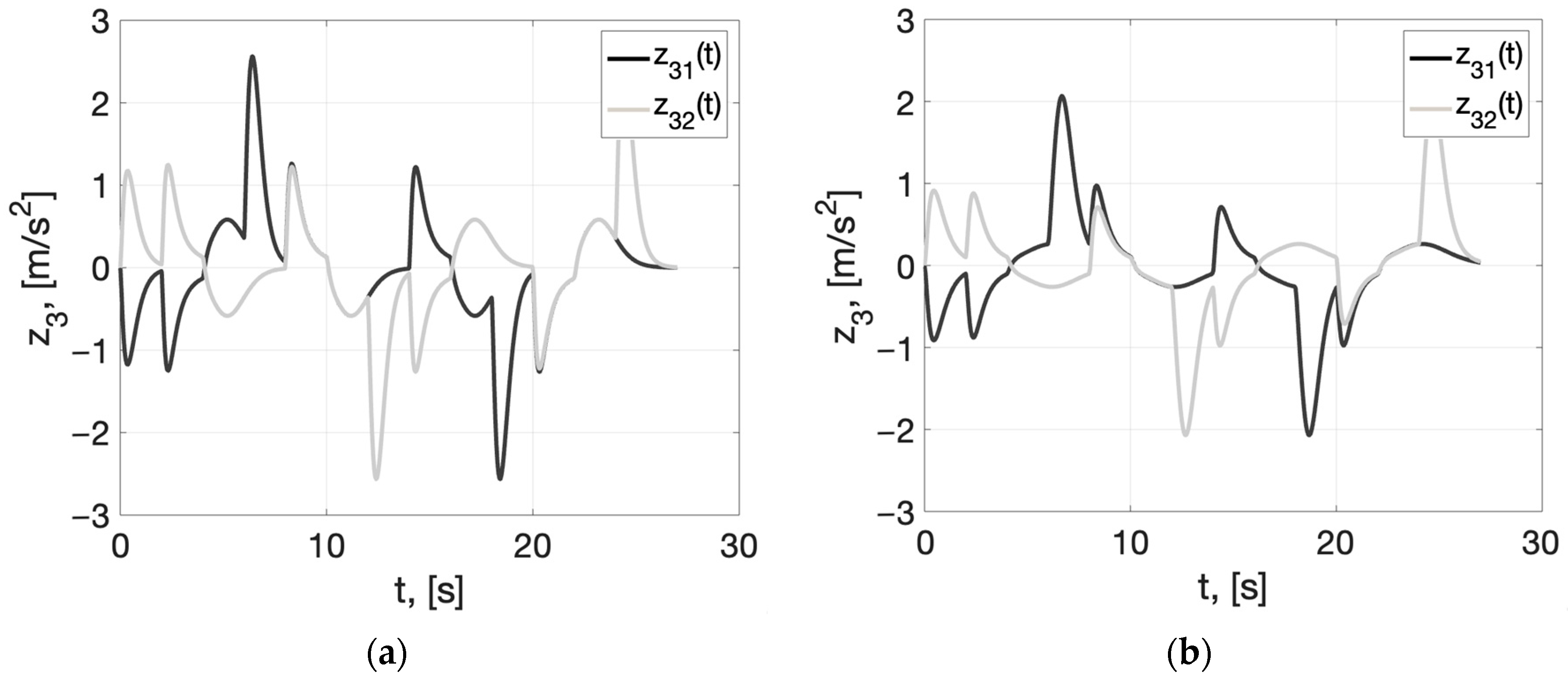
At different nominal values of (4), the signals
will automatically approximate the external signals and their derivatives in the neighborhood of special points in different ways. In the steady-state mode, in the admissible cases, their forms will be almost identical. The results of the corresponding numerical simulations are presented in
Section 3.
Second, by changing the dimensionality of the tracking differentiator blocks, it is possible to automatically generate smoothed trajectories with defined constraints in phase spaces of different dimensionalities. For example, the system (32) at
generates an achievable trajectory for a single-channel control plant (e.g., a single-link manipulator), and at
it generates a spatial trajectory for a UAV [
25].
From a computational viewpoint, the dynamic smoothing algorithm (32) is a sigmoid computation with three integration operations. Their implementation is not difficult using any software. The counting time of the algorithm is negligible and does not lead to lag in real-time operation when vector signals and are input to the tracking system of the mobile robot as needed.
2.3.3. Reasons for Designing Tracking Differentiators with Different Block Numbers
As was shown in the previous subsection, it is sufficient to apply a dynamic model consisting of three blocks (32) to smooth external signals and to recover their derivatives of the first, second, and even third orders. However, the number of blocks of the tracking differentiator can be both reduced and increased depending on the conditions of the problem to be solved. The main factors influencing the dimensionality of the differentiator are as follows:
Methods used to design control in a tracking system of a mobile robot;
The considered dynamic order of the control plant;
Noisiness/noiselessness of the external signal
For example, to solve the problem of tracking by the output variables
of System (1) of reference signals under the influence of parametric and external disturbances, we can apply a decomposition method for the design of sigmoid feedback, similar to the method we applied in the previous section for the design of a tracking differentiator [
24]. In this method, the first derivatives of the reference influences are treated as external disturbances (as in System (22)), and only the reference influences are used to form the static feedback. Another approach is to use mixed-variable observers in tracking systems [
27]. In this case, for feedback design, it is not necessary to obtain separate estimates of the derivatives of the reference influences. Thus, in both approaches, we only need to know the reference signals. If these signals do not contain parasitic disturbances, a single-block tracking differentiator with the minimum possible dynamic order can be used to smooth them:
where
. The inequalities for the choice of gains
considering the constraints on the velocity and acceleration of the mobile robot, similar to (29), (31), are of the form
The shapes of the smoothed curves obtained using the tracking differentiators (32) and (34) under the same constraints (4) will be almost identical.
The signals of the derivatives of the reference influences are usually needed in program control systems [
28] as well as when using the feedback linearization method [
3]. The order of the required derivatives depends on the number of dynamic links to be considered and is equal to the relative degree of the model used in the control plant.
Let derivatives up to and including
-th order be required for the design of the tracking system of a wheeled robot. The tracking differentiator, which smooths the external deterministic signal
and recovers its
derivatives, consists of
blocks and has a common order
:
where
are differentiator variables, the vector variable
defines the position of the center point of the wheeled platform, and the variable
is its
-th derivative,
To set the tracking differentiator (35), the constraints of a particular mobile robot on the higher derivatives are used. To fulfill the constraints on the state variables of the differentiator, its corrective influences, and their rate of change (i.e., constraints on the robot’s control influences and their rate of change), nominal values
are required
Equations for selection gains of tracking differentiator (35) at which the constraint of its variables is ensured
are similar to the system of dual inequalities (29) and have the following form:
The iterative procedure for setting the gains of sigmoid functions based on the system of inequalities (36) minimizing the steady-state tracking error (30) is similar to (31):
where
are very small positive constants.
Finally, the third factor influencing the choice of the dynamic order of the tracking differentiator is related to the need to filter the external signal if it additively contains parasitic noise for example, white noise with zero mathematical expectation and bounded variance.
Note that the noisy signal enters the input of the tracking differentiator (35) and passes through a chain of integrators. Thus, there is natural filtering of the input signal, which improves with increasing number of integrators. Analytical analysis and simulation results have shown that extending the dynamic order of the tracking differentiator is an alternative to installing low-pass prefilters [
29]. Two or three integration operations are often sufficient to obtain good performance. For example, if the recovery of the derivatives of the external signal is not a problem, a two or three (32) block tracking differentiator should be used instead of a single-block differentiator (33) for smoothing and filtering the external signal. In turn, instead of a three-block differentiator (32), a four- or five-block tracking differentiator must be used in order to obtain signals of satisfactory quality up to and including the second derivative.
Note that, as in the Kalman filter setting, when selecting gains of sigmoidal functions, we have to compromise between tracking accuracy and filtering features of the tracking differentiator [
23]. Therefore, another algorithm is needed instead of the procedure for setting gains
(37). However, a detailed analysis of this problem is beyond the framework of this research.
2.3.4. Some Aspects of Designing Paths and Polygons
The use of tracking differentiators can greatly simplify the computational aspect of planning achievable trajectories offline on a polygon with stationary obstacles.
Let a wheeled robot have a primary operating scenario in the form of a sequence of 3D points defined in a fixed Cartesian coordinate system
, considering time
Connecting all neighboring pairs of point
and
by segments
we obtain a primitive non-smooth 3D trajectory and, accordingly, the primary reference influences for both output variables
of the system (1):
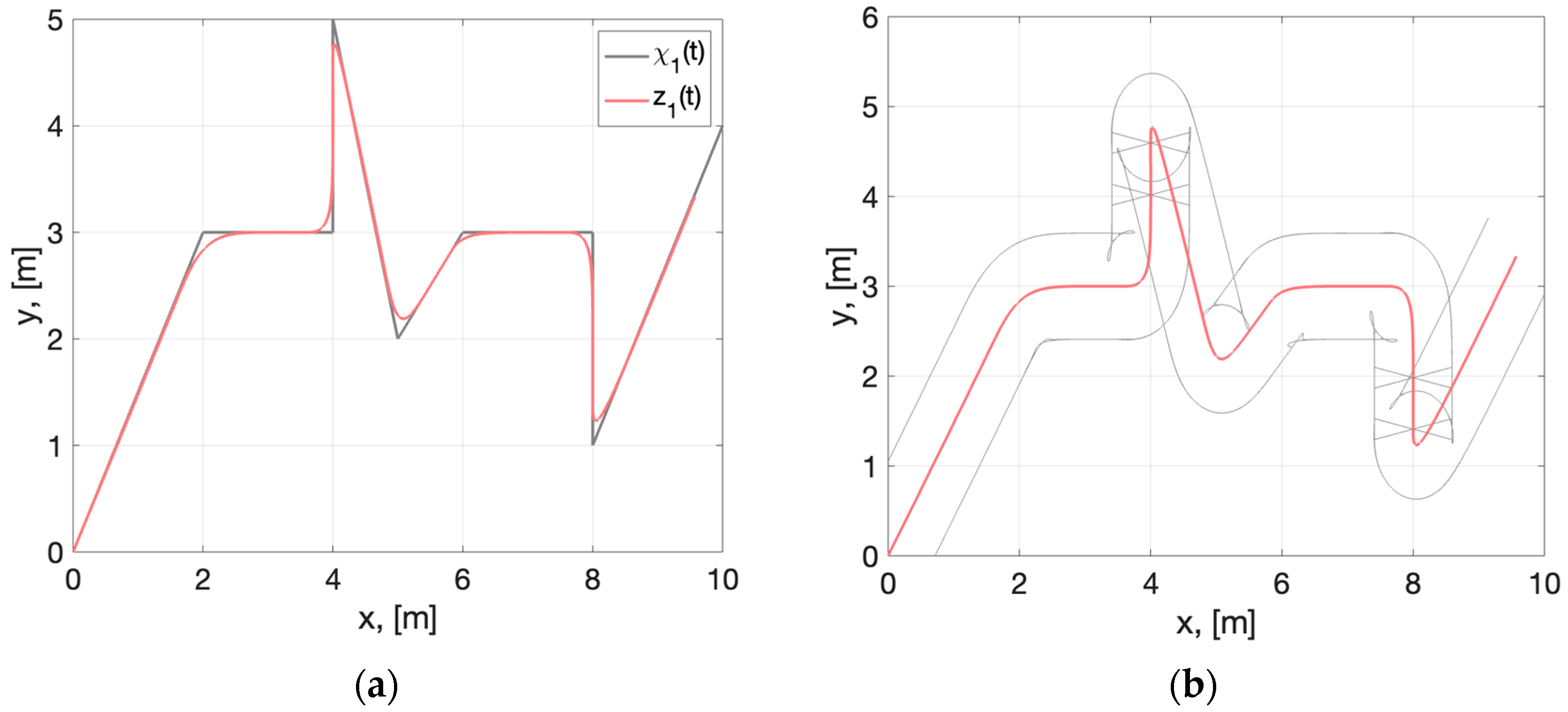
In standard approaches, special analytical approximations are used to smooth the angles of the composite trajectory (39) [
11]. In this case, the problem of ensuring the specified constraints on the velocity and acceleration of the robot requires additional algorithmization. If the singular points are sufficiently numerous, analytical smoothing methods provide a large computational load, which makes it difficult to use them in real time. In addition, composite analytical reference influences take up much memory when stored on the on-board computer.
The application of dynamic smoothing algorithms for primitive trajectories (39) completely eliminates these problems. Only a sequence of points (38) is stored in the on-board computer memory, and smoothing of the corresponding primitive trajectories (39) is performed in real time using a tracking differentiator (35), (37) of the required dimensionality.
Note that this method is not intended for solving terminal problems and does not provide an exact fit to the reference points. However, it can be used for offline simulation on a compressed time scale. We can quickly correct the smoothed trajectory obtained after the first run of the algorithm and achieve the desired result by correcting the coordinates of particular points (38). At the same time, visual results will be obtained quickly and without cumbersome analytical calculations. For such a process, it is sufficient to use a single-block tracking differentiator (33).
Let us consider some aspects of planning a safe route for an oversized wheeled vehicle on a polygon with stationary obstacles. The opposite task is to arrange objects on the polygon (factory workshop, warehouse) so that the robot can safely fulfill the operating scenario. Therefore, it is necessary to consider the dimensions of the vehicle when planning the polygon. The developed dynamic smoothing algorithm can be applied to graphically represent the position change not only for the center of mass of the wheeled platform but also for its corner points. In this problem, it is better (but not necessarily) to use a two-block tracking differentiator
Its parameters are determined from the procedure (37) at
and have the form:
Let us present the corresponding computations for a symmetrical rectangular wheeled platform whose center of mass is located at the intersection of diagonals in the middle of the center line. Let us introduce the following notations: is the distance (with a small margin) from the center of mass to each corner point of the platform; is the value of the angle between the center line of the platform and its diagonals; is the current coordinates of the center of mass of the platform; and is the current coordinates of the corner points of the platform, Recall that in System (1), is the angle between the axis and the center line of the platform, which coincides with the direction of the velocity vector, (3).
First, the waypoints of the mobile robot (38) are planned on the polygon. The primary reference influences (39) are entered into the input of the tracking differentiator (41) with the output variables
, which simulate the position of the platform’s center of mass in the stationary Cartesian coordinate system. The formulas for computing the current coordinates of the platform corner points are as follows
and are correct at
. Technically, at other directions of the velocity vector, we should change the signs
in Equation (42) and use additional logic. Let us not complicate the algorithm and track the direction of motion of the platform. When changing the quadrant in which the angle
is located, the angular points on the right side
will represent the path of the points on the left side
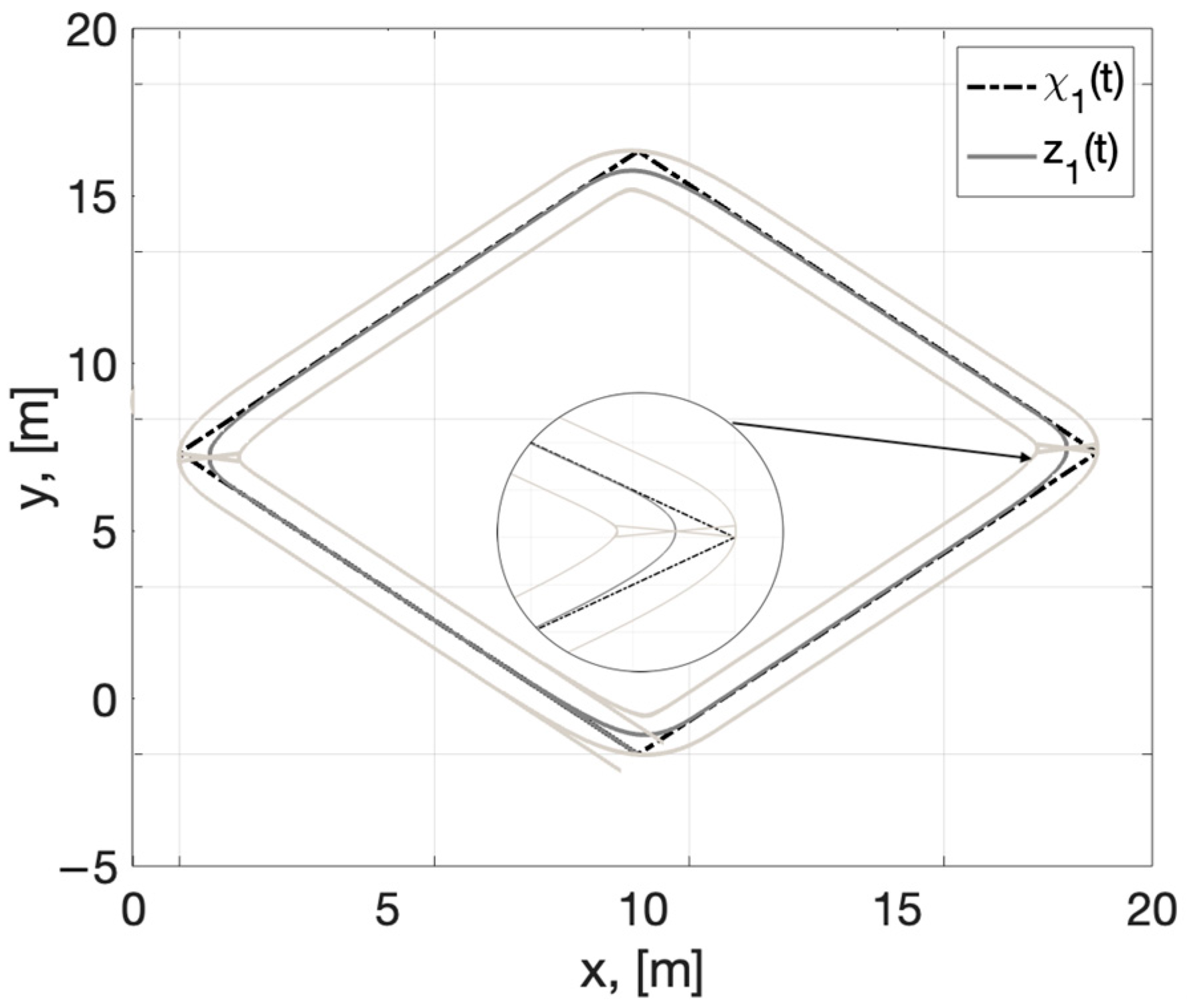
and conversely. Thus, curves
and (42) shown on the same plot will indicate the dimensional footprint of the wheeled platform, which is required.
Such representations are a visual and convenient tool for polygon design, object placement, and trajectory planning.
The developed algorithms complex is a convenient tool for mobile robot motion planning and polygon design.
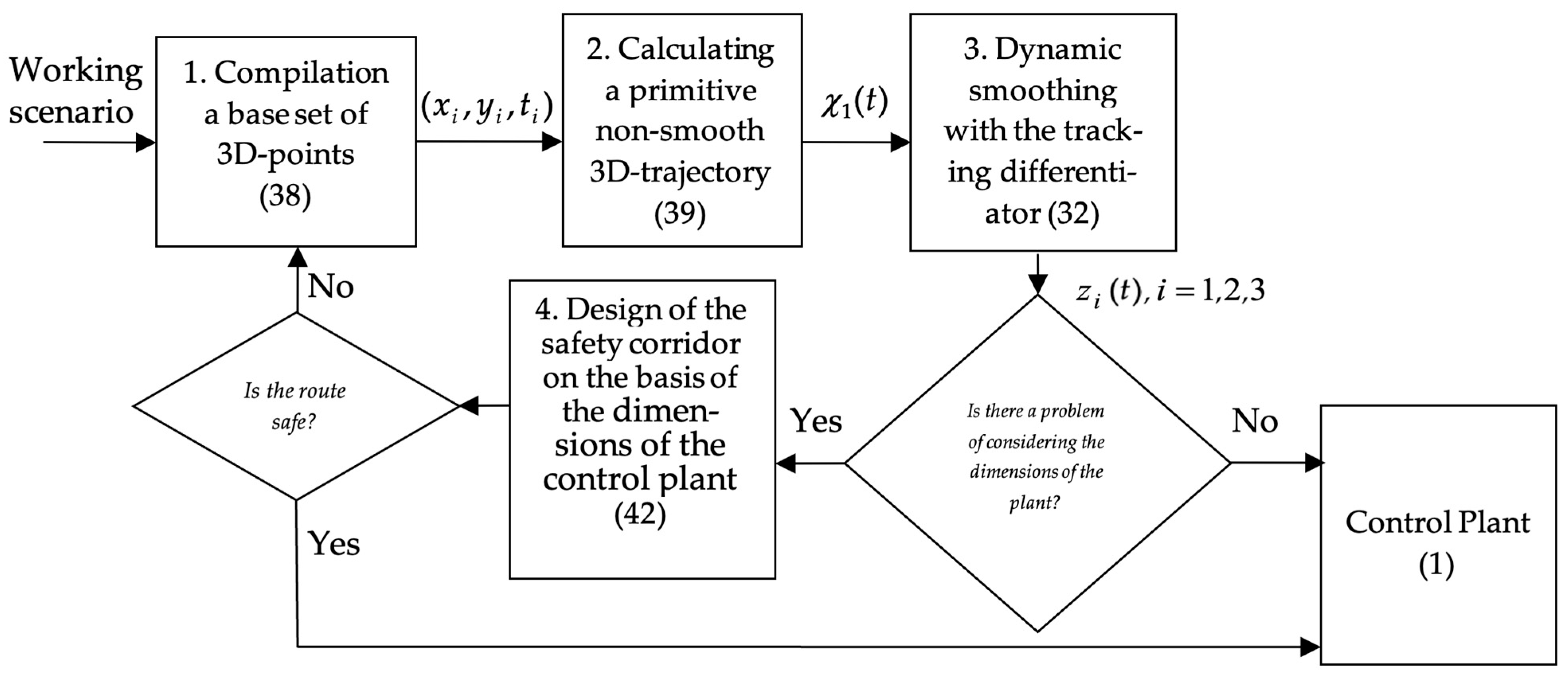
Figure 1 shows a flowchart of the robot motion planning process on a polygon with stationary obstacles.
This process includes the following:
Designing a base set of 3D points (38) for a specific workspace considering obstacles, robot velocity and turning radius constraints, route length, etc.;
Computing a primitive non-smooth trajectory (39) over a reference set of 3D points (38);
Smoothing of the primitive trajectory using a tracking differentiator. This process is a numerical solution of differential Equation (32), i.e., calculation of the sigmoid and integration operations;
Dimension trajectory simulation and safe corridor visualization (42).
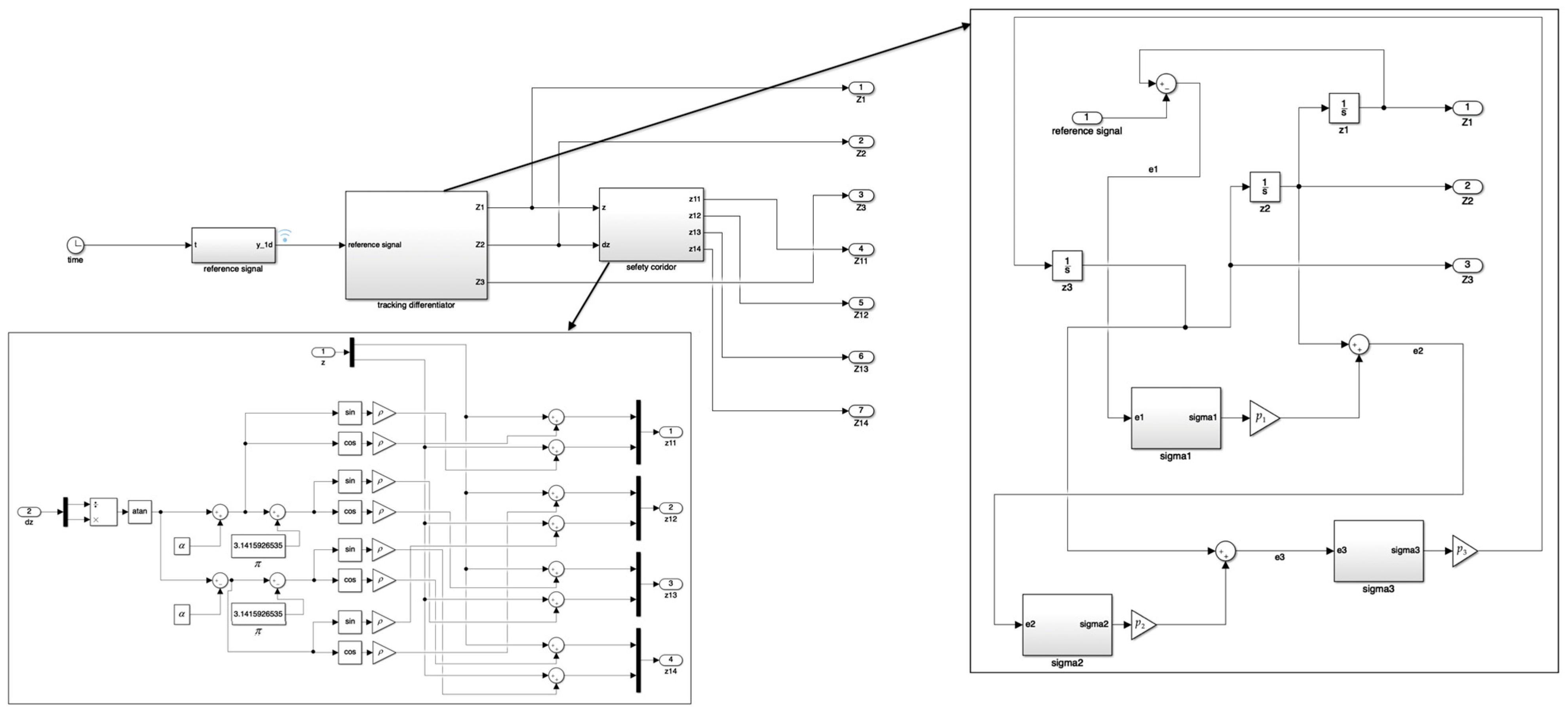
Appendix A presents a structural diagram created by simulating the algorithms developed in the MATLAB Simulink software environment. The main interface of Simulink is a graphical block diagraming tool and a customizable set of block libraries. Therefore, the structure of the graphical block diagram in the MATLAB Simulink software environment (
Figure A1) is similar to that of the flowchart shown in
Figure 1. At the same time,
Figure A1 clearly demonstrates the computational process and the computational operations performed.
Note that in the first stage, machine learning methods can be effectively used to generate primitive trajectories considering various criteria [
30]. The result is the solution of discrete optimization problems in the form of a set of discrete waypoints. As mentioned, designing a smooth and achievable trajectory on their basis requires additional tools [
16].
In the next subsection, the results of numerical simulations of this and other developed algorithms will be presented.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








