
ω-Circulant Matrices: A Selection of Modern Applications from Preconditioning of Approximated PDEs to Subdivision Schemes


Abstract
1. Introduction
2. Some Remarks on Circulant and -Circulant Matrices
3. Parallel Solution and Preconditioning of Triangular Toeplitz Linear Systems
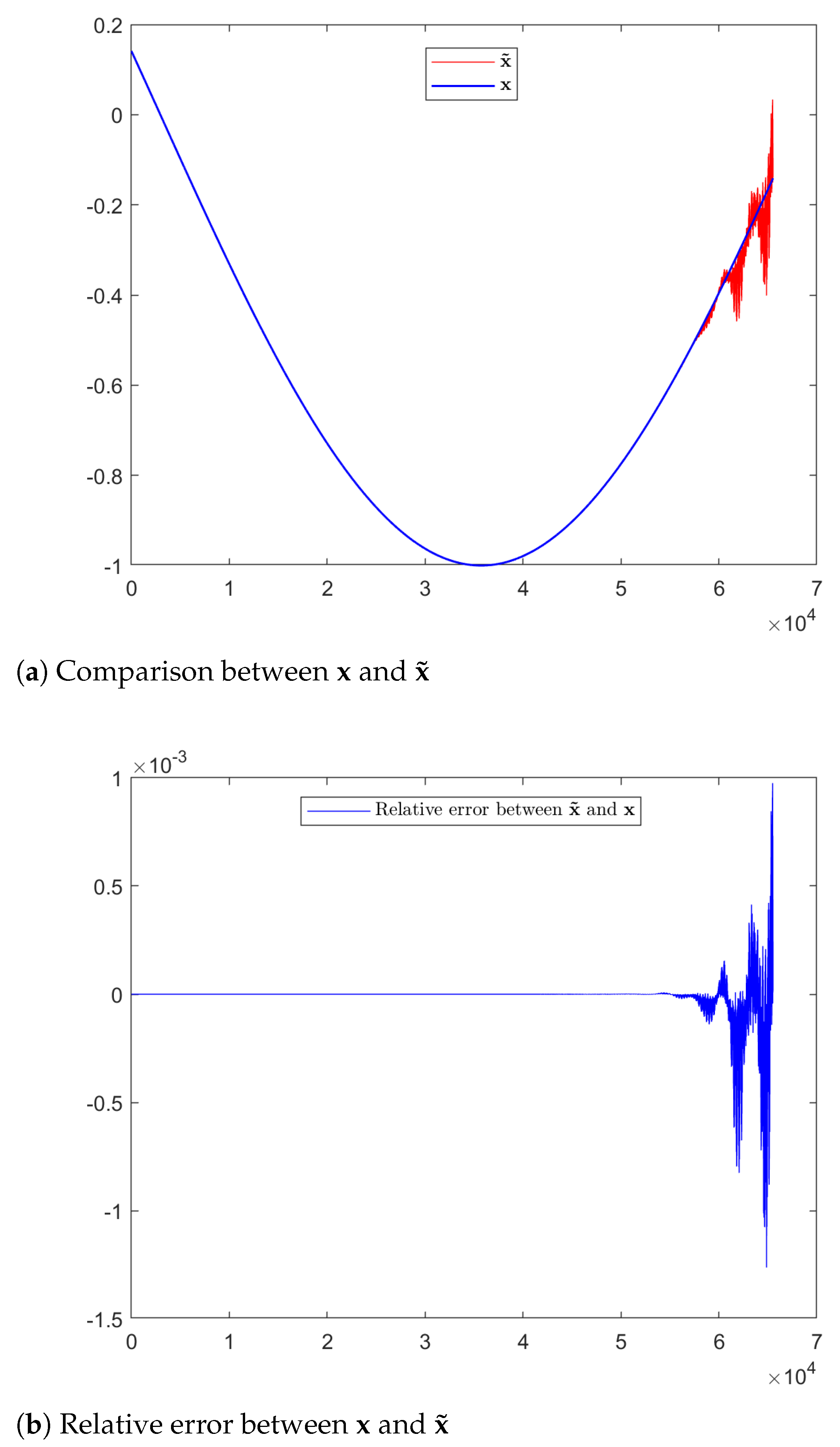
3.1. Parallel Solution of (Block) Triangular Toeplitz Systems
- Compute via the FFT, with sequential cost ;
- Compute , with sequential cost ;
- Compute via the FFT, with sequential cost .
3.2. Preconditioning for (Block) Triangular Toeplitz Systems
- m is the number of grid nodes in the spatial mesh and is the spatial step size;
- is the time mesh step size, obtained as , where n is the number of time steps;
- is the identity matrix of size m;
- is the matrix obtained by discretizing the Laplacian operator in (4) with the central finite difference method.
- Compute via the FFT;
- Compute , , where , denote the k-th block of dimension m of , ;
- Compute via the FFT;
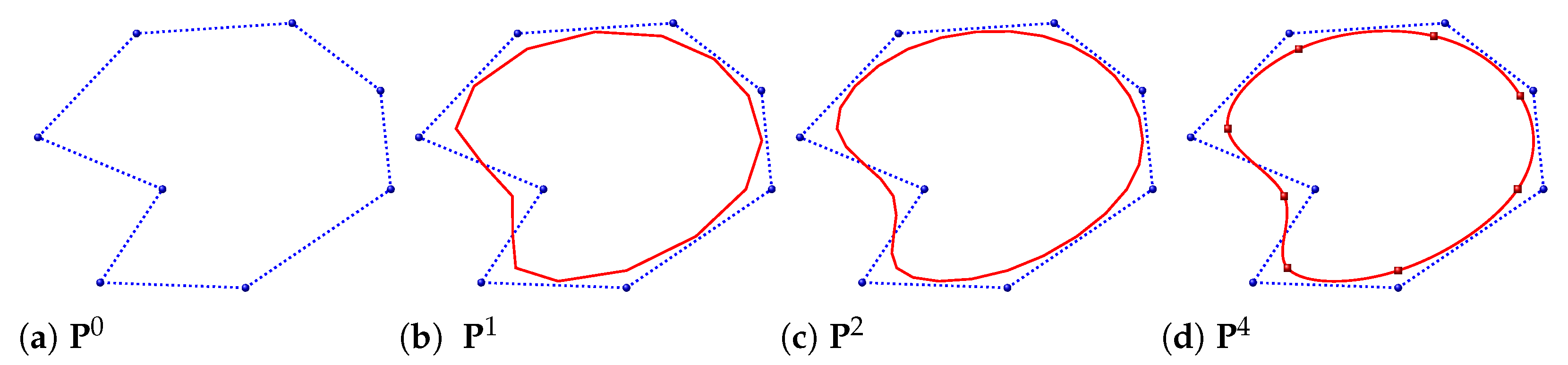
4. Basic Ideas on Scalar Subdivision Schemes
- Odd-symmetric if ;
- Even-symmetric if for .
The Block-Circulant Case for Hermite Interpolation
5. Interpolation Model with Scalar Subdivision Schemes
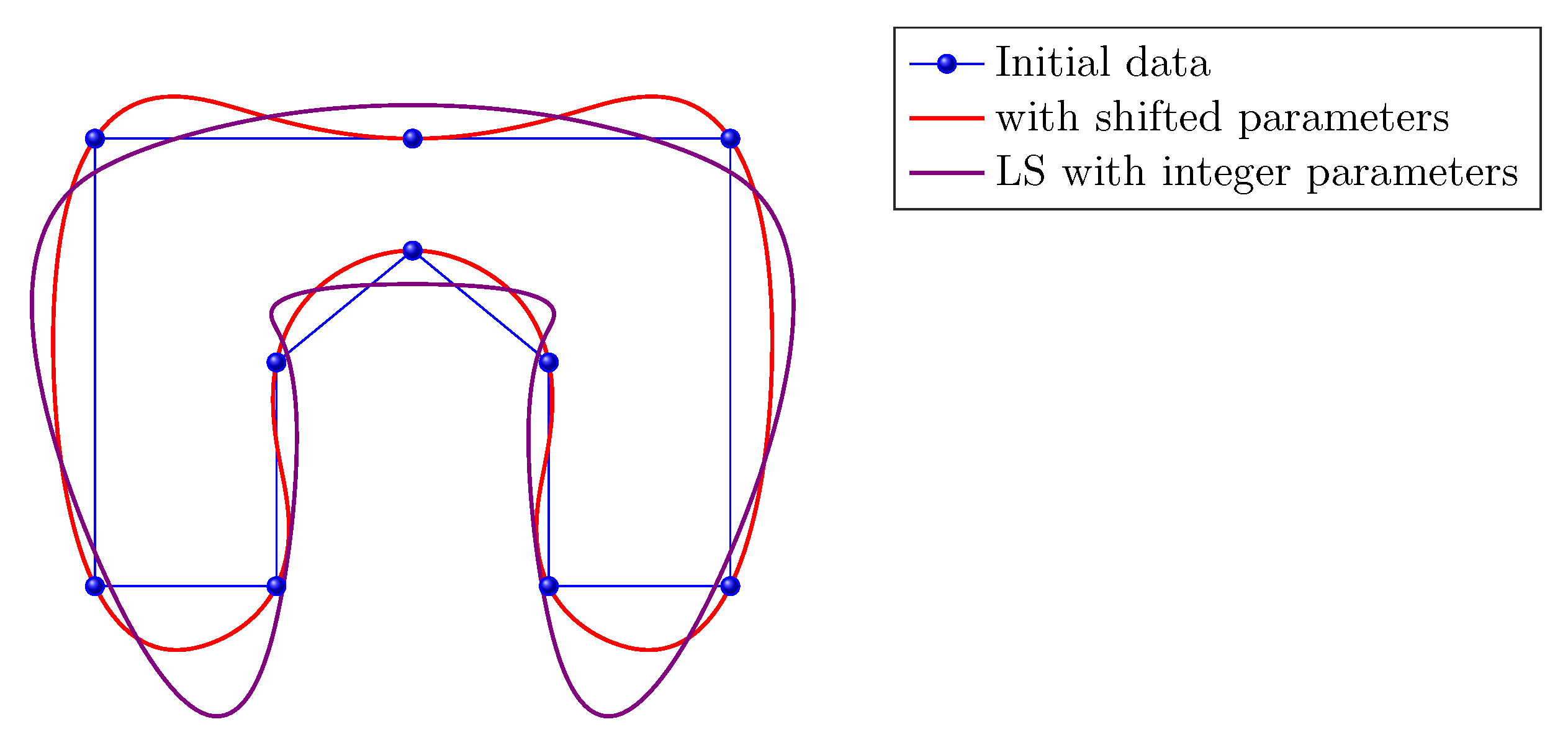
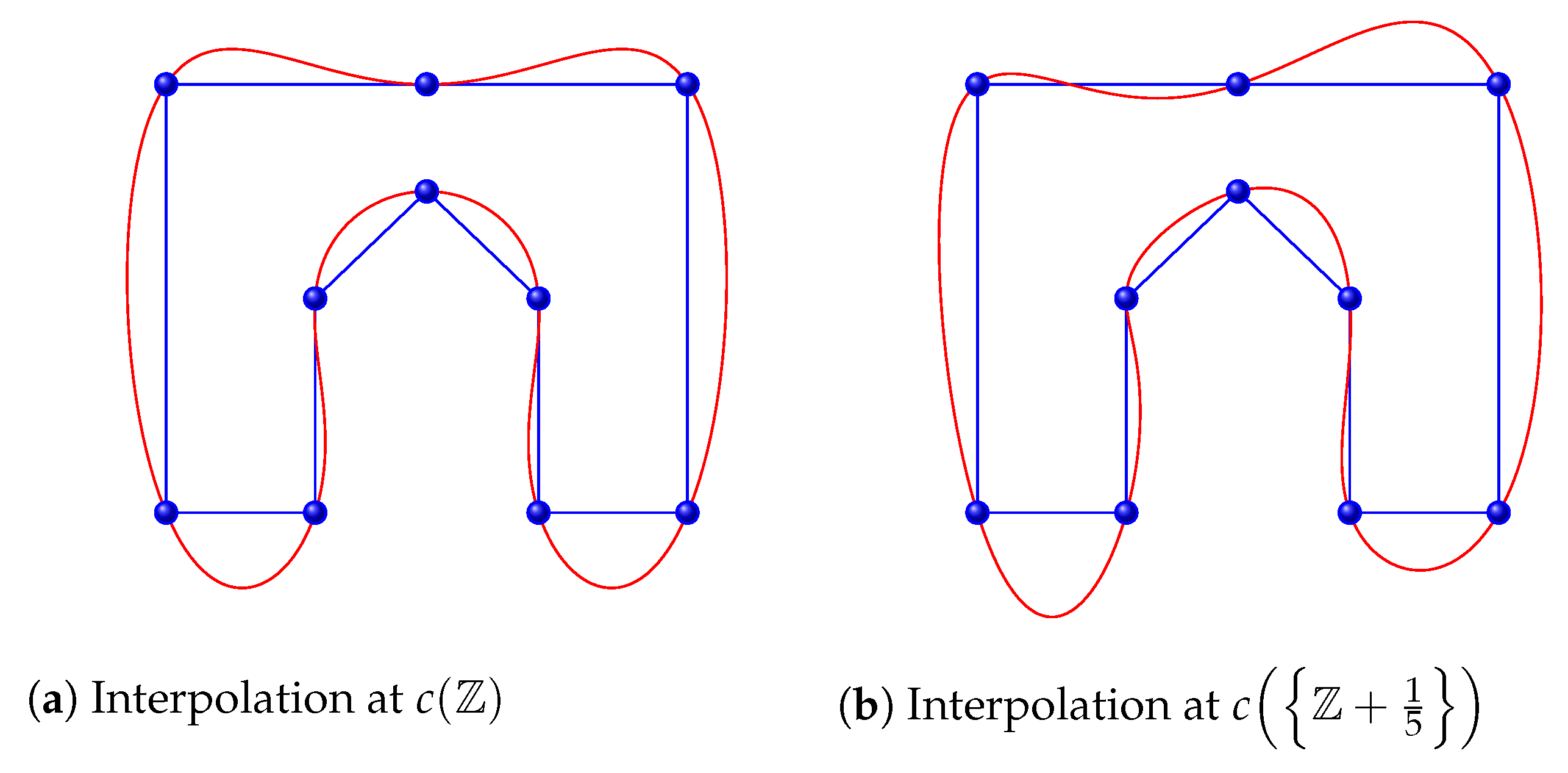
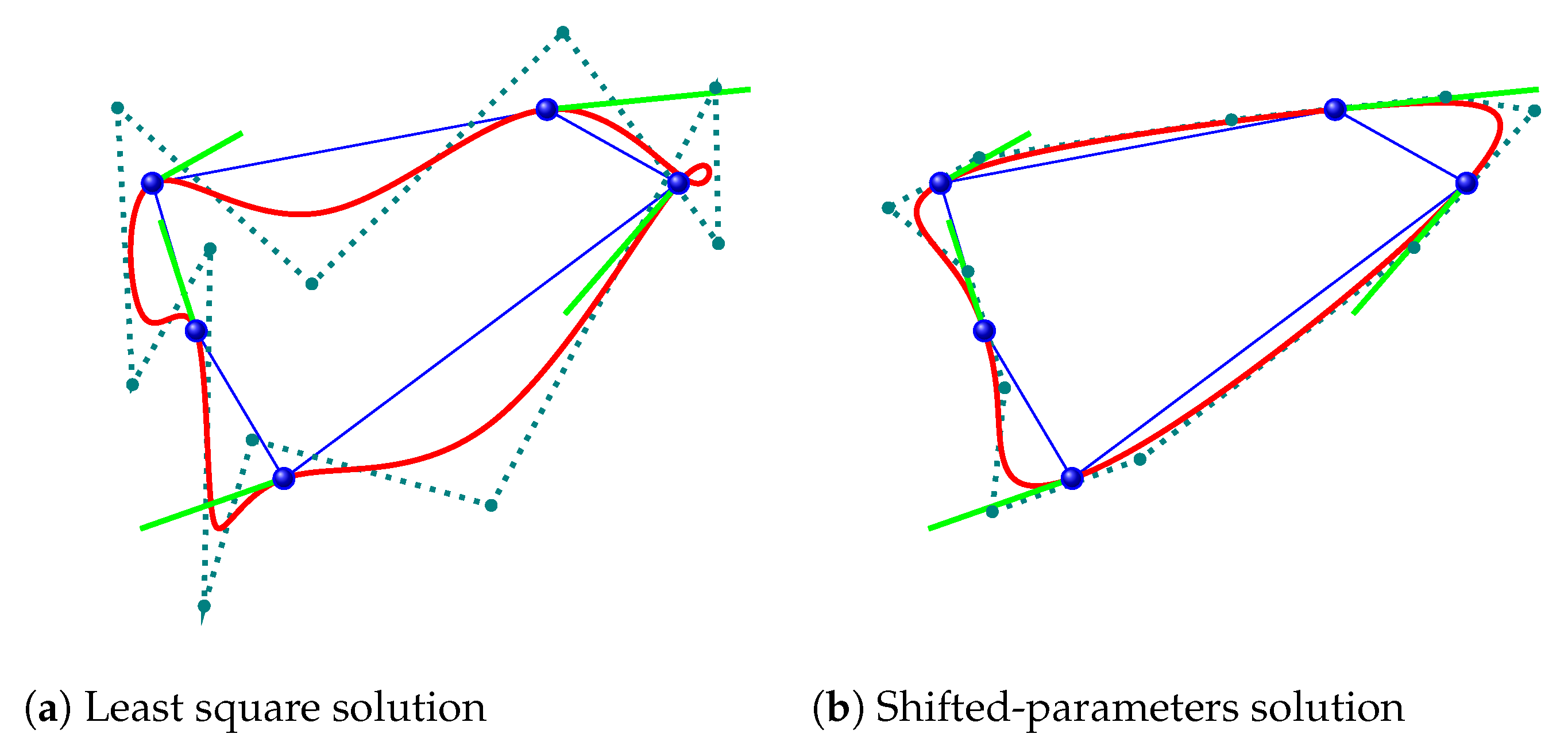
5.1. A Solution by Shifting Parameters
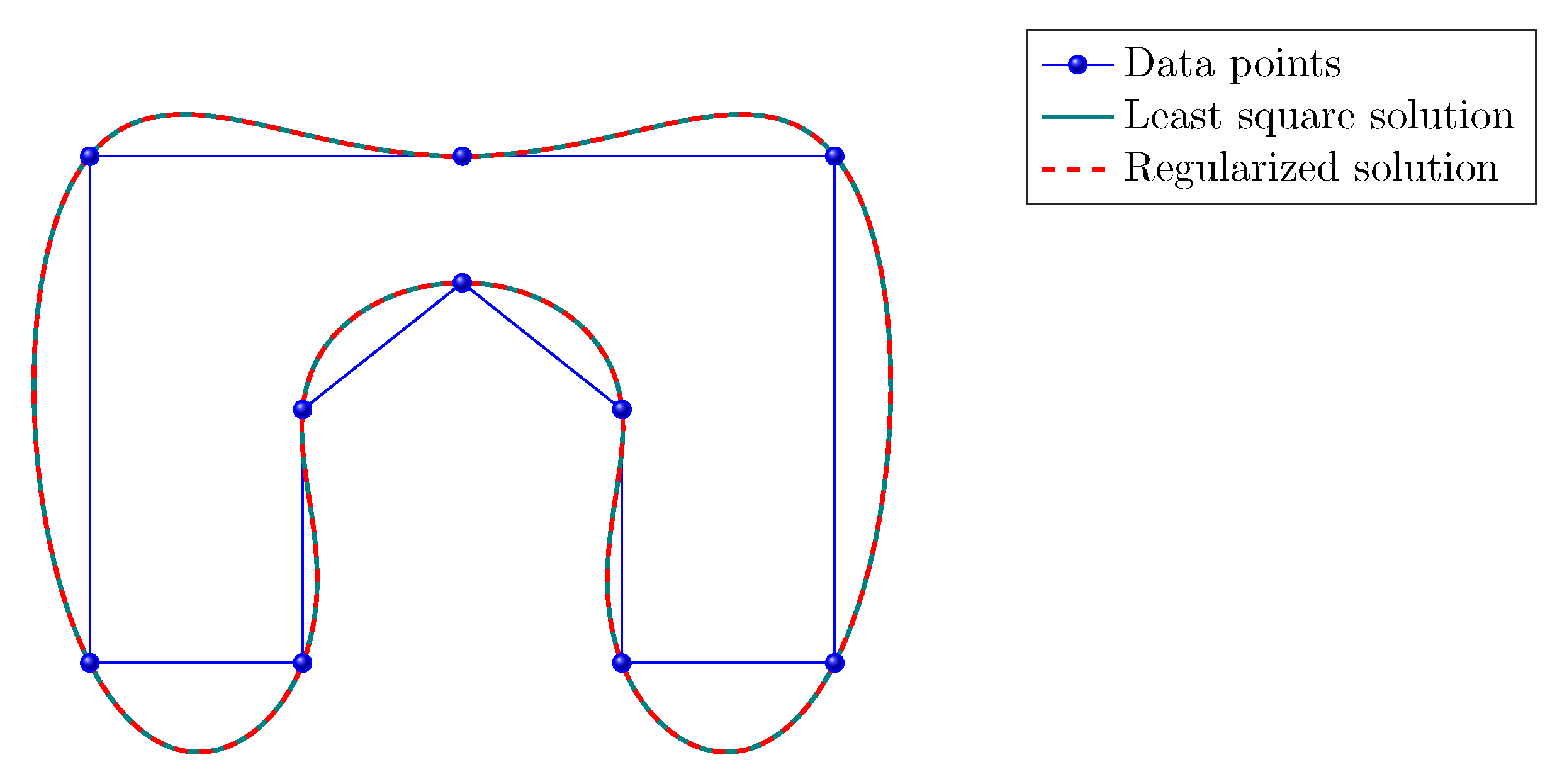
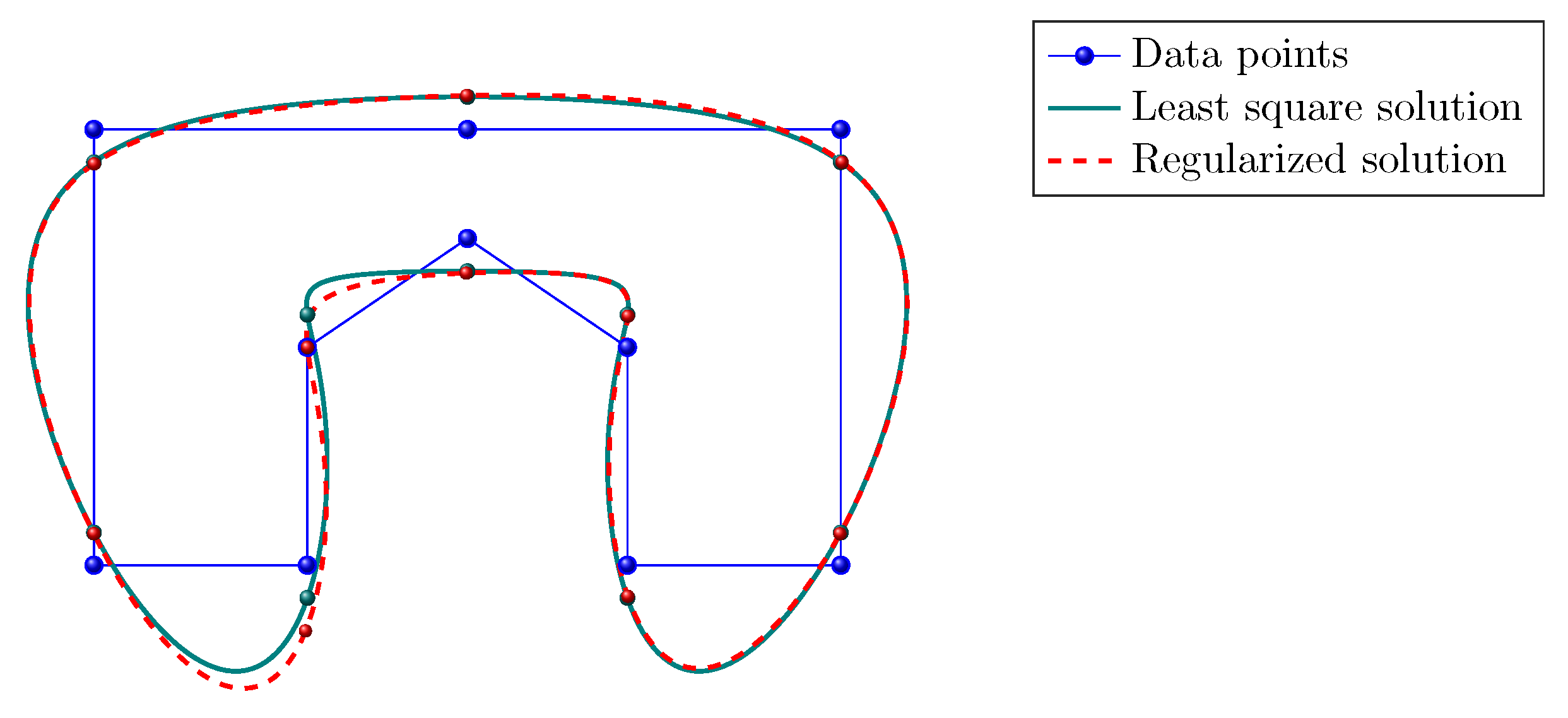
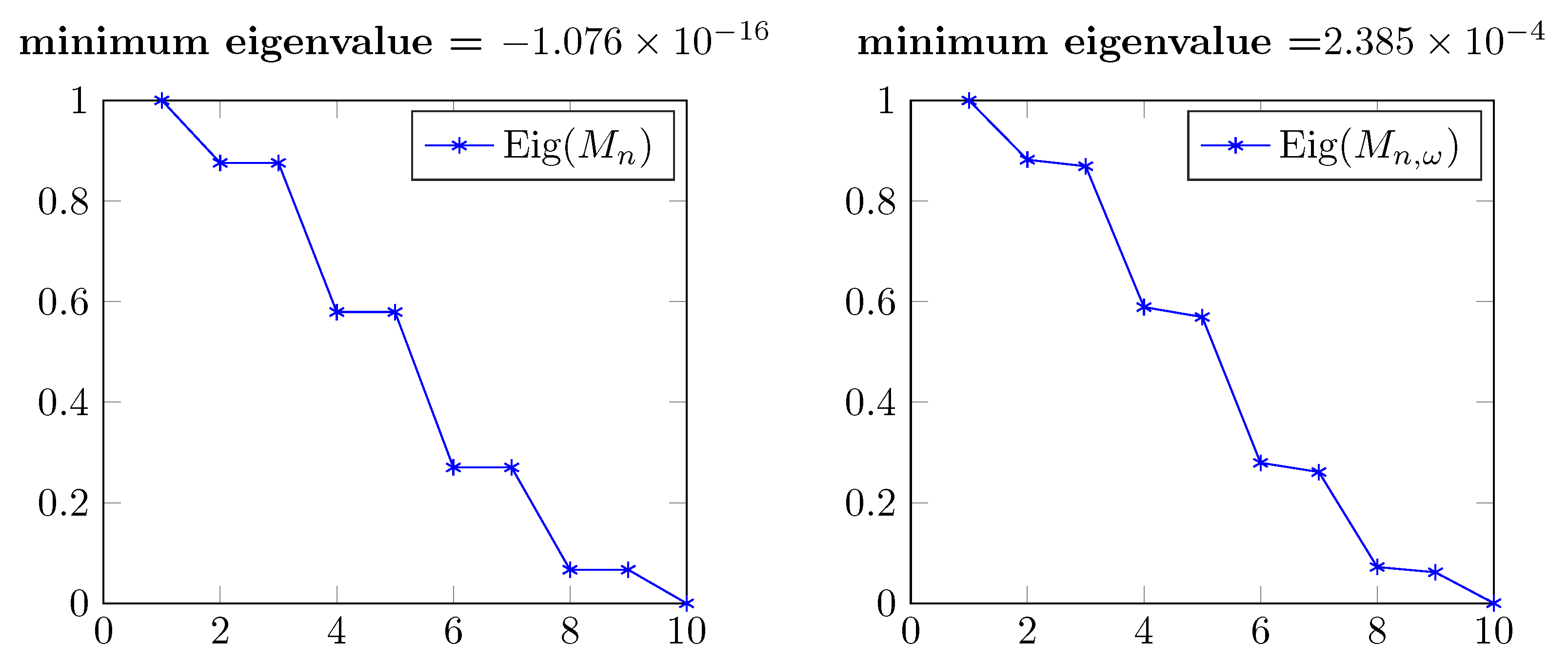
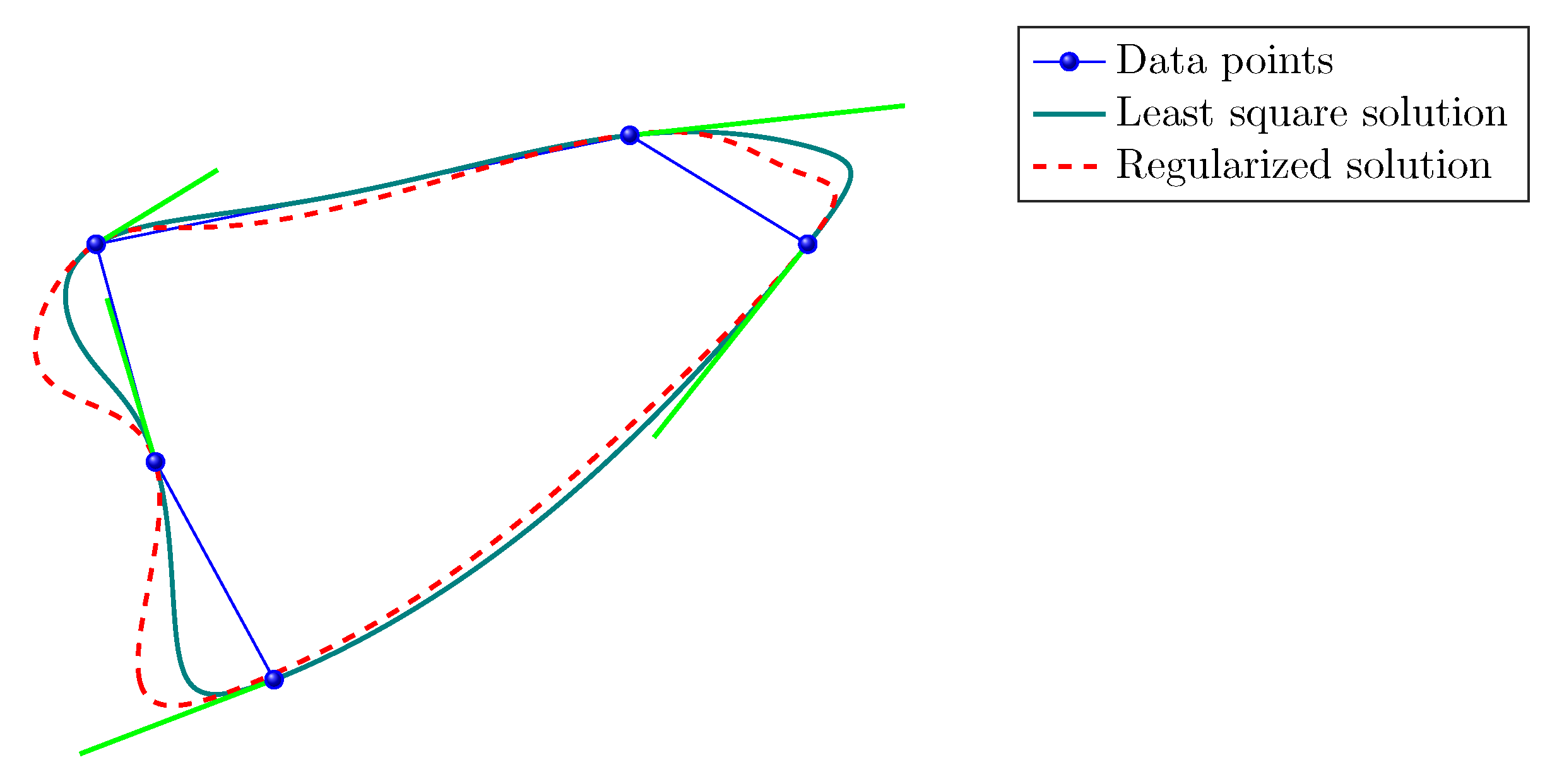
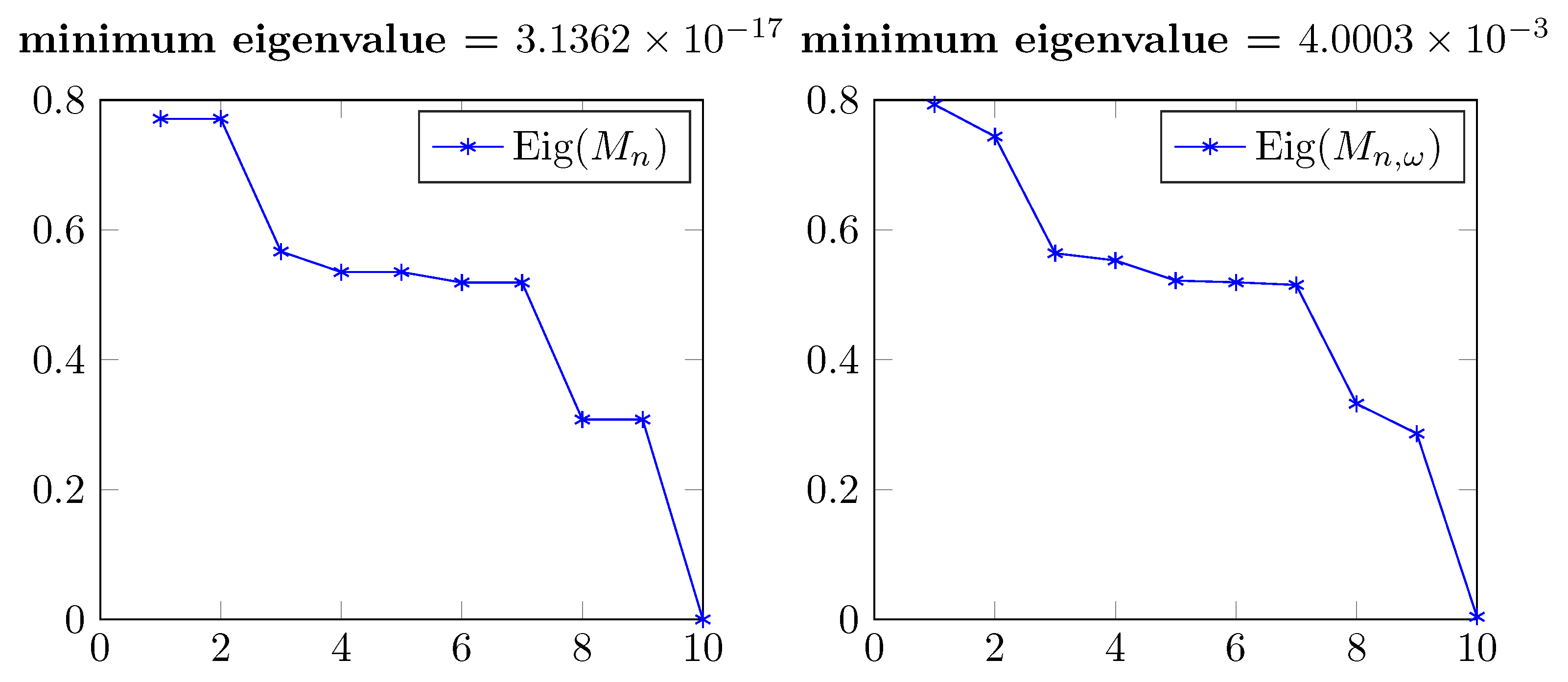
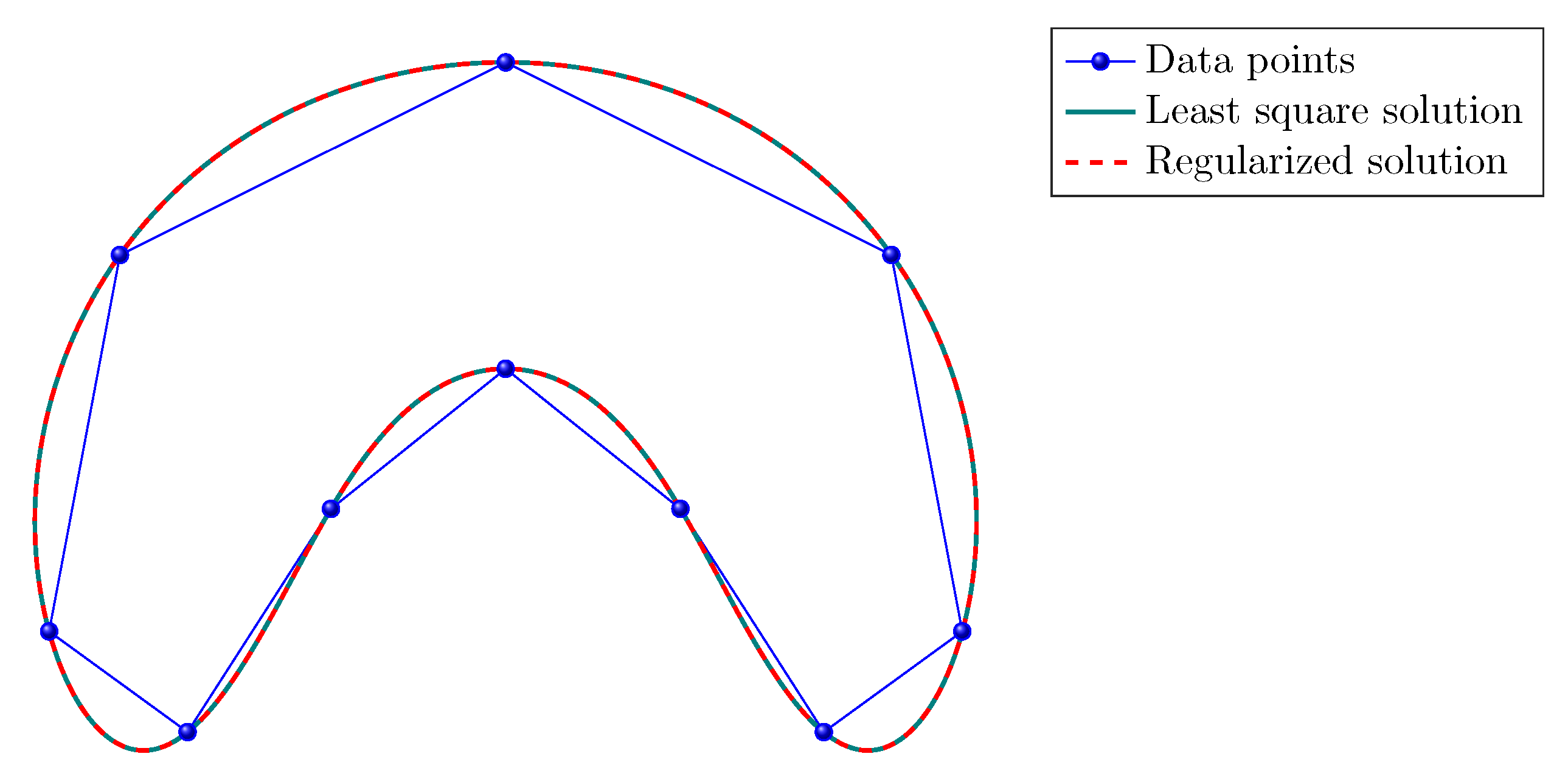
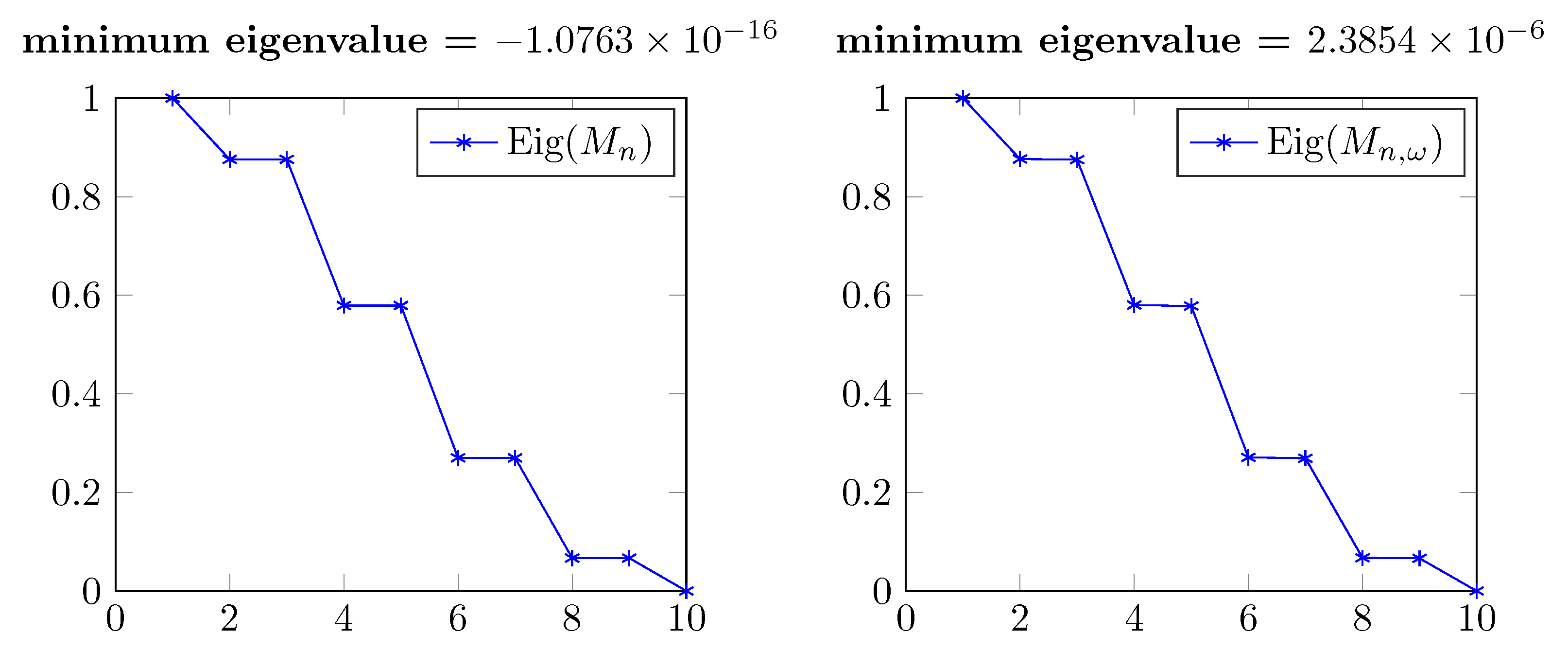
5.2. Our Regularizing Strategy
6. Numerical Tests
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Garoni, C.; Serra-Capizzano, S. Generalized Locally Toeplitz Sequences: Theory and Applications, Vol. I; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Ng, M.K. Iterative Methods for Toeplitz Systems. Numerical Mathematics and Scientific Computation; Oxford University Press: New York, NY, USA, 2004. [Google Scholar]
- Aricò, A.; Serra-Capizzano, S.; Tasche, M. Fast and numerically stable algorithms for discrete Hartley transforms and applications to preconditioning. Commun. Inf. Syst. 2005, 5, 21–68. [Google Scholar] [CrossRef]
- Hansen, P.C.; Nagy, J.G.; O’Leary, D.P. Deblurring images. Matrices, spectra, and filtering. In Fundamentals of Algorithms; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2006; Volume 3. [Google Scholar]
- Kailath, T.; Olshevsky, V. Displacement structure approach to discrete-trigonometric-transform based preconditioners of G. Strang type and of T. Chan type. Toeplitz matrices: Structures, algorithms and applications. (Cortona, 1996). Calcolo 1998, 33, 191–208. [Google Scholar] [CrossRef]
- Serra-Capizzano, S. A Korovkin-type theory for finite Toeplitz operators via matrix algebras. Numer. Math. 1999, 82, 117–142. [Google Scholar] [CrossRef]
- Davis, P. Circulant Matrices; John Wiley and Sons: Hoboken, NJ, USA, 1979. [Google Scholar]
- Bini, D. Matrix structures in parallel matrix computations. Calcolo 1988, 25, 37–51. [Google Scholar] [CrossRef]
- Chan, R.H.F.; Jin, X.Q. An introduction to iterative Toeplitz solvers. In Fundamentals of Algorithms; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 2007; Volume 5. [Google Scholar]
- Chan, R.H.; Ng, M.K. Conjugate gradient methods for Toeplitz systems. SIAM Rev. 1996, 38, 427–482. [Google Scholar] [CrossRef]
- Chan, T.F.; Elman, H.C. Fourier analysis of iterative methods for elliptic problems. SIAM Rev. 1989, 31, 20–49. [Google Scholar] [CrossRef]
- Huckle, T. A note on skewcirculant preconditioners for elliptic problems. Numer. Algorithms 1992, 2, 279–286. [Google Scholar] [CrossRef]
- Huckle, T. Thomas Circulant and skewcirculant matrices for solving Toeplitz matrix problems. Iterative methods in numerical linear algebra (Copper Mountain, CO, 1990). SIAM J. Matrix Anal. Appl. 1992, 13, 767–777. [Google Scholar] [CrossRef]
- Serra-Capizzano, S. The GLT class as a generalized Fourier analysis and applications. Linear Algebra Appl. 2006, 419, 180–233. [Google Scholar] [CrossRef]
- Loan, C.V. Computational frameworks for the fast Fourier transform. In Frontiers in Applied Mathematics; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 1992; Volume 10. [Google Scholar]
- Aricò, A.; Donatelli, M.; Serra-Capizzano, S. V-cycle optimal convergence for certain (multilevel) structured linear systems. SIAM J. Matrix Anal. Appl. 2004, 26, 186–214. [Google Scholar] [CrossRef]
- Bertaccini, D.; Ng, M.K. Block ω-circulant preconditioners for the systems of differential equations. Calcolo 2003, 40, 71–90. [Google Scholar] [CrossRef]
- Serra-Capizzano, S.; Tablino-Possio, C. Multigrid methods for multilevel circulant matrices. SIAM J. Sci. Comput. 2004, 26, 55–85. [Google Scholar] [CrossRef]
- Bini, D. Parallel solutions of certain Toeplitz linear systems. SIAM J. Comput. 1984, 13, 268–276. [Google Scholar] [CrossRef]
- Cline, R.E.; Plemmons, R.J.; Worm, G. Generalized inverses of certain Toeplitz matrices. Linear Algebra Its Appl. 1974, 8, 25–33. [Google Scholar] [CrossRef]
- Liu, J.; Wu, S.L. A fast block α-circulant preconditioner for all-at-once systems from wave equations. SIAM J. Matrix Anal. Appl. 2020, 41, 1912–1943. [Google Scholar] [CrossRef]
- Hon, S.; Serra-Capizzano, S. A block Toeplitz preconditioner for all-at-once systems from linear wave equations. Electron. Trans. Numer. Anal. 2023, 58, 177–195. [Google Scholar] [CrossRef]
- Danieli, F.; Wathen, A.J. All-at-once solution of linear wave equations. (English summary). Numer. Linear Algebra Appl. 2021, 28, 16. [Google Scholar] [CrossRef]
- Gander, M.J.; Halpern, L.; Rannou, J.; Ryan, J. A direct time parallel solver by diagonalization for the wave equation. SIAM J. Sci. Comput. 2019, 41, A220–A245. [Google Scholar] [CrossRef]
- Gander, M.J.; Wu, S.L. A diagonalization-based parareal algorithm for dissipative and wave propagation problems. SIAM J. Numer. Anal. 2020, 58, 2981–3009. [Google Scholar] [CrossRef]
- Soszyńska, M.; Richter, T. Adaptive time-step control for a monolithic multirate scheme coupling the heat and wave equation. BIT 2021, 61, 1367–1396. [Google Scholar] [CrossRef]
- Bertaccini, D.; Durastante, F. Limited memory block preconditioners for fast solution of fractional partial differential equations. J. Sci. Comput. 2018, 77, 950–970. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, J. Fast parallel-in-time quasi-boundary value methods for backward heat conduction problems. Appl. Numer. Math. 2023, 184, 325–339. [Google Scholar] [CrossRef]
- Andersson, L.E.; Stewart, N.F. Introduction to the Mathematics of Subdivision Surfaces; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010. [Google Scholar]
- Dyn, N. Linear and Nonlinear Subdivision Schemes in Geometric Modeling; School of Mathematical Sciences, Tel Aviv University: Tel Aviv, Israel, 2008. [Google Scholar]
- Dyn, N.; Levin, D. Subdivision schemes in geometric modelling. Acta Numer. 2002, 11, 73–144. [Google Scholar] [CrossRef]
- Dyn, N.; Levin, D.; Gregory, J.A. A 4-point interpolatory subdivision scheme for curve design. Comput. Aided Geom. Des. 1987, 4, 257–268. [Google Scholar] [CrossRef]
- Sabin, M. Analysis and Design of Univariate Subdivision Schemes; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Chui, C.; de Villiers, J. Wavelet Subdivision Methods: Gems for Rendering Curves and Surfaces; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Schaefer, S.; Warren, J. Exact evaluation of limits and tangents for non-polynomial subdivision schemes. Comput. Aided Geom. Des. 2008, 25, 607–620. [Google Scholar] [CrossRef]
- Daubechies, I.; Guskov, I.; Sweldens, W. Commutation for irregular subdivision. Constr. Approx. 2001, 17, 479–514. [Google Scholar] [CrossRef]
- Dyn, N.; Gregory, J.A.; Levin, D. Analysis of uniform binary subdivision schemes for curve design. Constr. Approx. 1991, 7, 127–147. [Google Scholar] [CrossRef]
- Rossignac, J.; Schaefer, S. J-splines. Comput. Aided Des. 2008, 40, 1024–1032. [Google Scholar] [CrossRef]
- Dyn, N.; Floater, M.S.; Hormann, K. A C2 four-point subdivision scheme with fourth order accuracy and its extensions. In Mathematical Methods for Curves and Surfaces: TROMSØ 2004, Modern Methods in Mathematics; Nashboro Press: Brentwood, TN, USA, 2005; pp. 145–156. [Google Scholar]
- Engl, H.W.; Hanke, M.; Neubauer, A. Regularization of Inverse Problems; Springer: New York, NY, USA, 1996. [Google Scholar]
- Hoppe, H.; DeRose, T.; Duchamp, T.; Halstead, M.; Jin, H.; McDonald, J.; Schweitzer, J.; Stuetzle, W. Piecewise smooth surface reconstruction. In Proceedings of the 21st Annual Conference on Computer Graphics and Interactive Techniques, Orlando, FL, USA, 24–29 July 1994; pp. 295–302. [Google Scholar]
- Halstead, M.A.; Kass, M.; DeRose, T. Efficient, fair interpolation using Catmull-Clark surfaces. In Proceedings of the 20th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 2–6 August 1993; pp. 35–44. [Google Scholar]
- Hansen, P.C. Rank-Deficient and Discrete Ill-Posed Problems: Numerical Aspects of Linear Inversion; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1999. [Google Scholar]
- Plonka, G. An efficient algorithm for periodic Hermite spline interpolation with shifted nodes. Numer. Algorithms 1993, 5, 51–62. [Google Scholar] [CrossRef]
- Okaniwa, S.; Nasri, A.; Lin, H.; Abbas, A.; Kineri, Y.; Maekawa, T. Uniform B-spline curve interpolation with prescribed tangent and curvature vectors. IEEE Trans. Vis. Comput. Graph. 2012, 18, 1474–1487. [Google Scholar] [CrossRef]
- Albrecht, G. Invariante Gütekriterien im Kurvendesign–Einige neuere Entwicklungen. Effiziente Methoden der Geometrischen Modellierung und der Wissenschaftlichen Visualisierung; Springer: Berlin/Heidelberg, Germany, 1999; pp. 134–148. [Google Scholar]
- Veltkamp, R.C.; Wesselink, W. Modeling 3D curves of minimal energy. Comput. Graph. Forum 1995, 14, 97–110. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Díaz Fuentes, R.; Serra-Capizzano, S.; Sormani, R.L. ω-Circulant Matrices: A Selection of Modern Applications from Preconditioning of Approximated PDEs to Subdivision Schemes. Algorithms 2023, 16, 328. https://doi.org/10.3390/a16070328
Díaz Fuentes R, Serra-Capizzano S, Sormani RL. ω-Circulant Matrices: A Selection of Modern Applications from Preconditioning of Approximated PDEs to Subdivision Schemes. Algorithms. 2023; 16(7):328. https://doi.org/10.3390/a16070328
Chicago/Turabian StyleDíaz Fuentes, Rafael, Stefano Serra-Capizzano, and Rosita Luisa Sormani. 2023. "ω-Circulant Matrices: A Selection of Modern Applications from Preconditioning of Approximated PDEs to Subdivision Schemes" Algorithms 16, no. 7: 328. https://doi.org/10.3390/a16070328
APA StyleDíaz Fuentes, R., Serra-Capizzano, S., & Sormani, R. L. (2023). ω-Circulant Matrices: A Selection of Modern Applications from Preconditioning of Approximated PDEs to Subdivision Schemes. Algorithms, 16(7), 328. https://doi.org/10.3390/a16070328