


A Shadowed Type-2 Fuzzy Approach for Crossover Parameter Adaptation in Differential Evolution





Abstract
1. Introduction
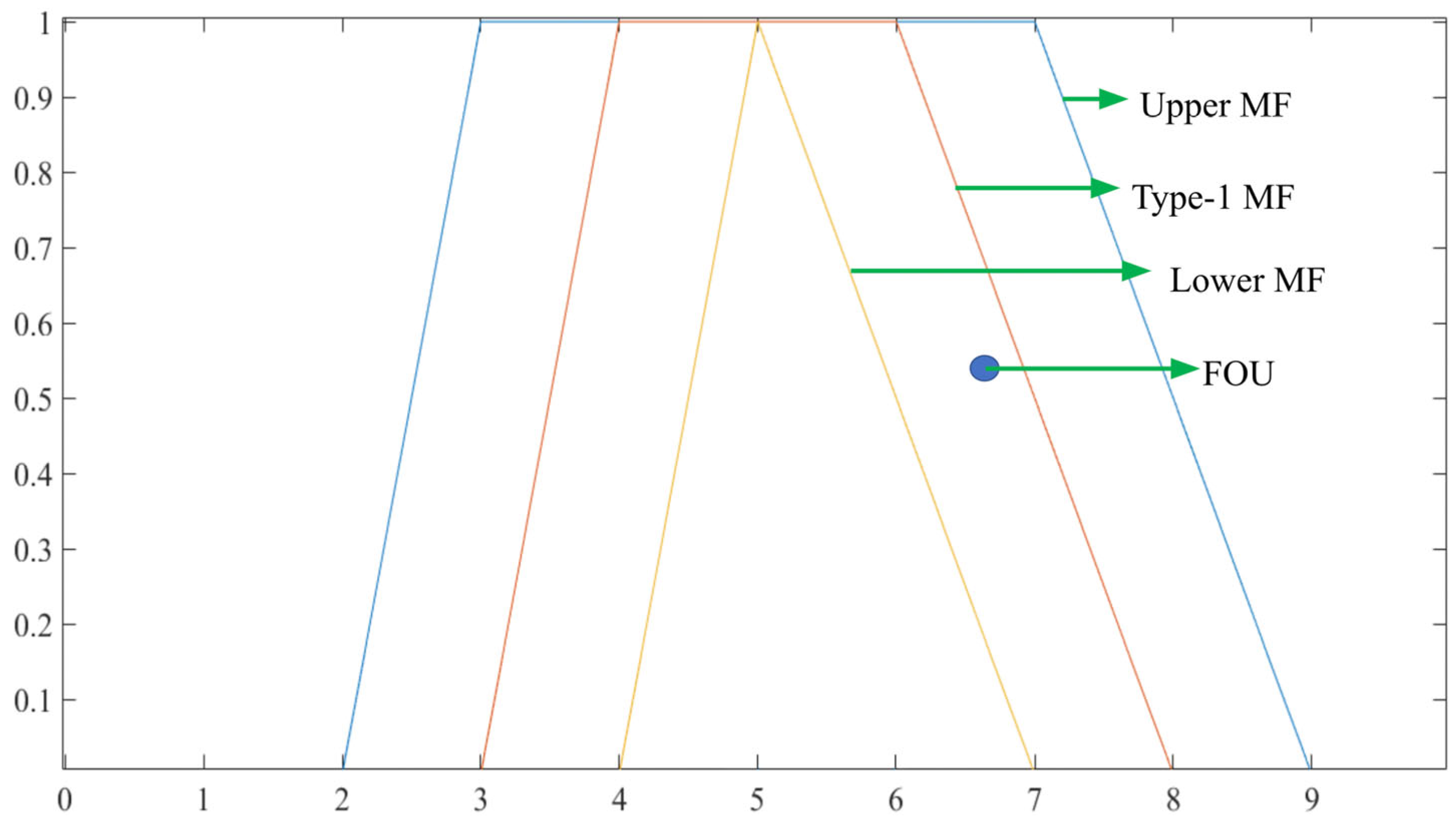
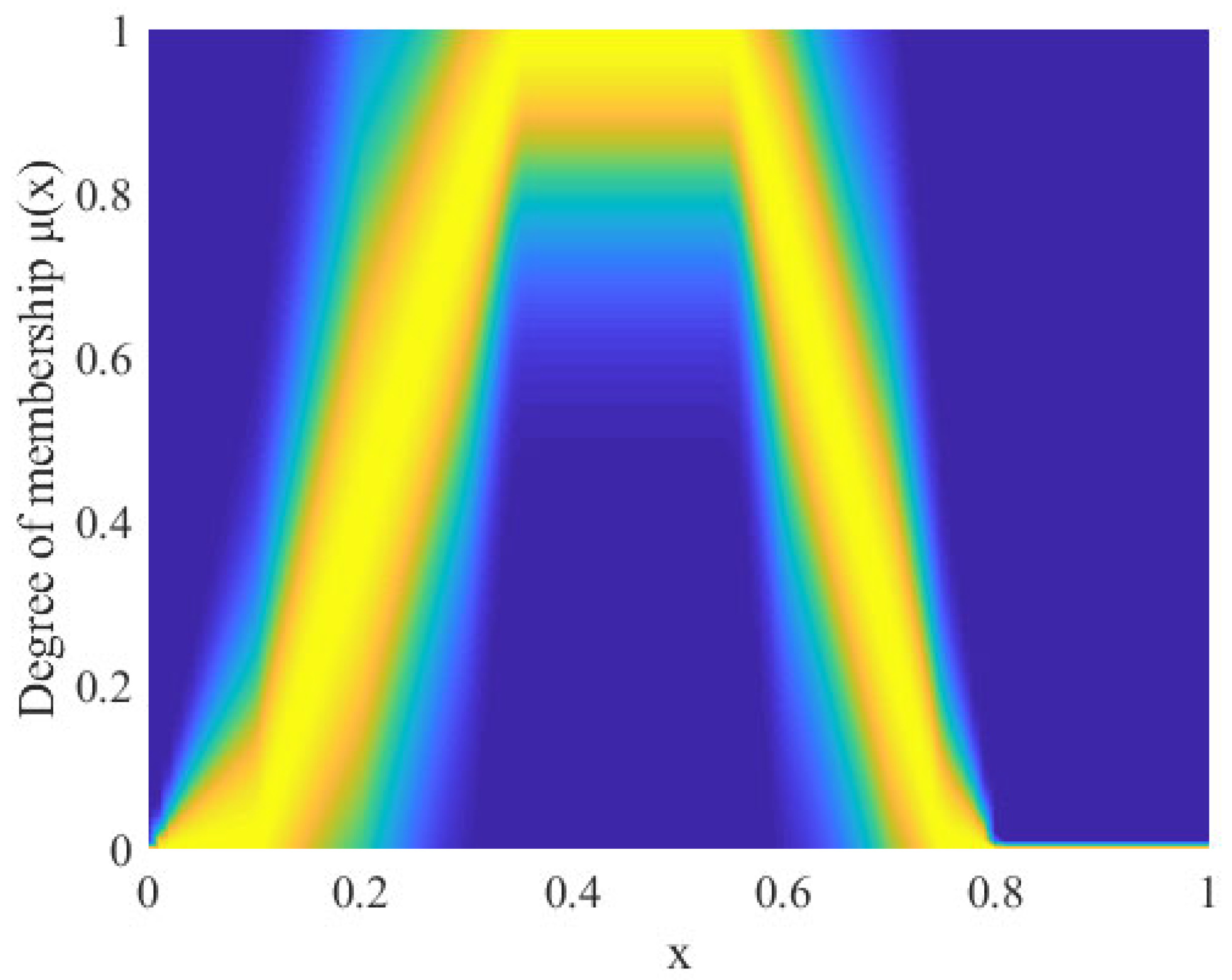
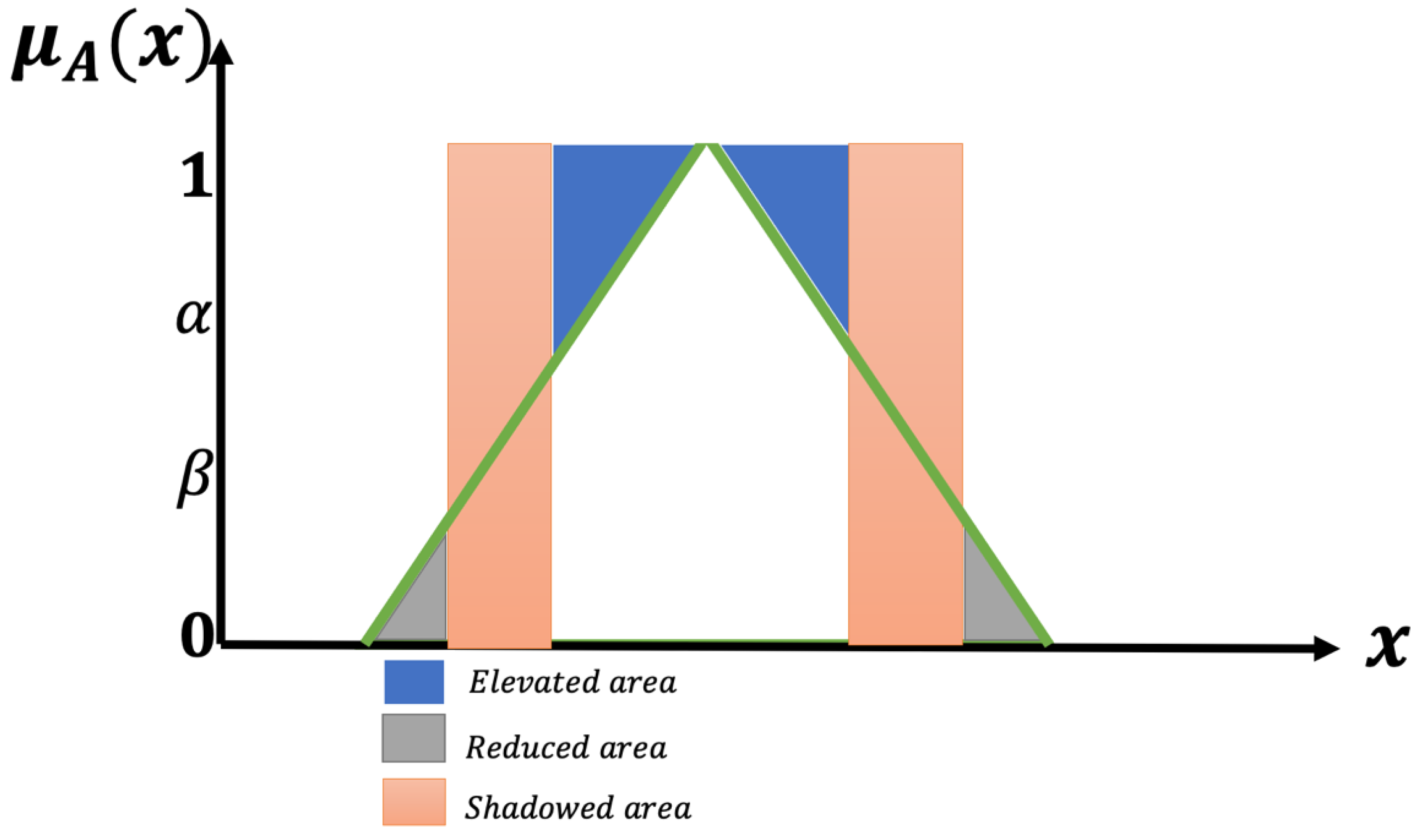
2. Shadowed Type-2 Fuzzy Systems
3. Differential Evolution
3.1. Population Size
3.2. Mutation
3.3. Crossover
3.4. Selection of the Best Individual
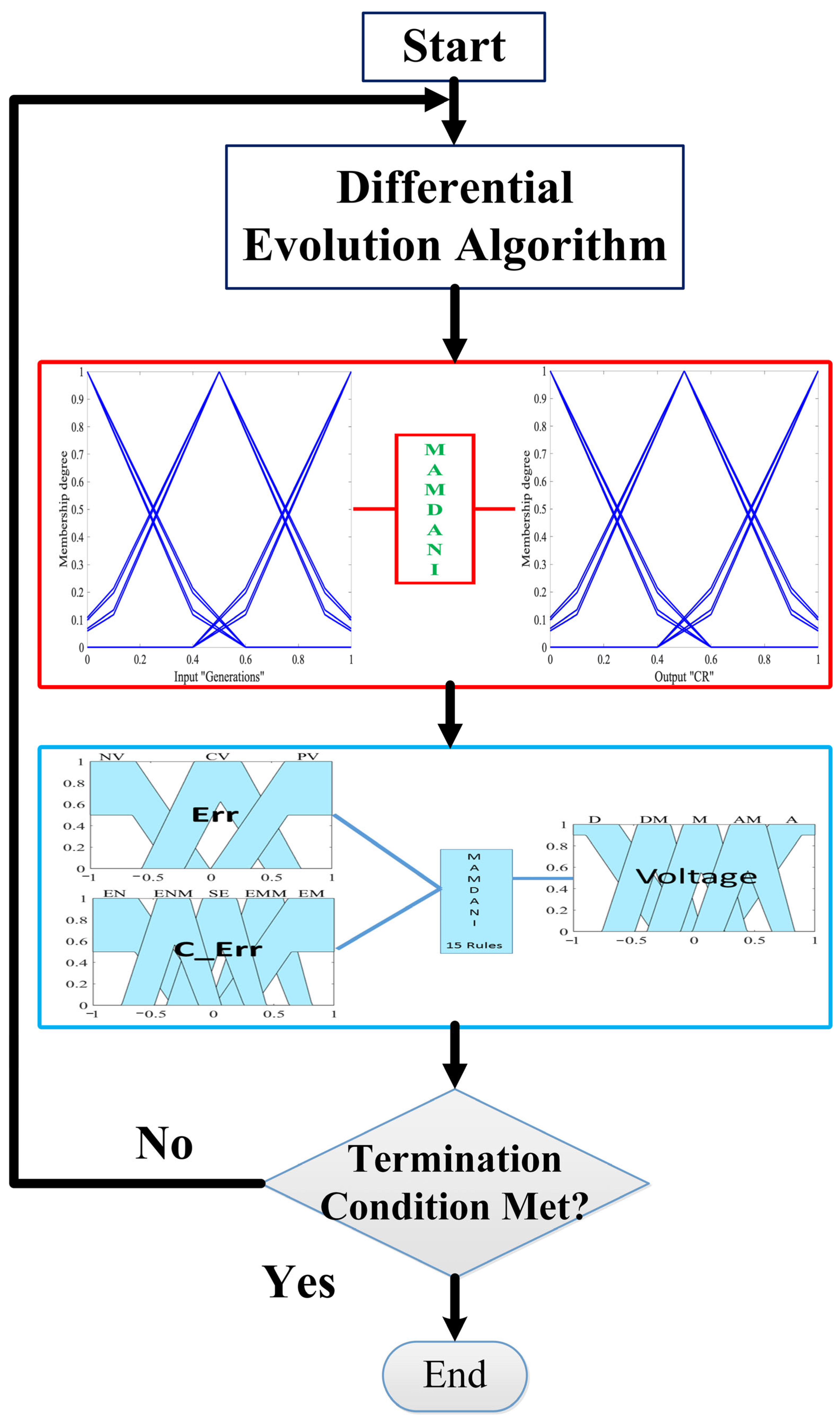
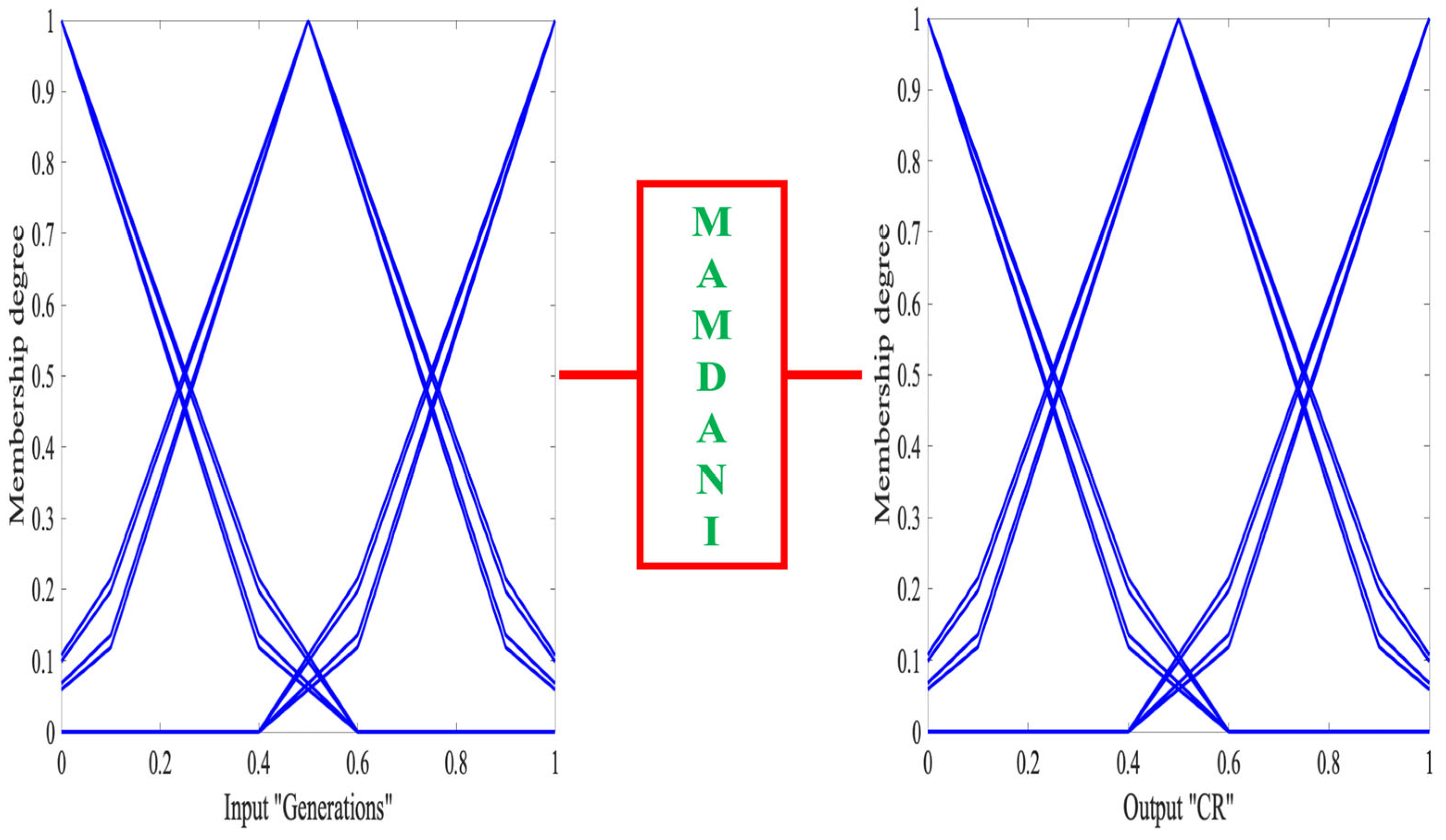
4. Proposed Shadowed Fuzzy using DE Algorithm
- If generation is low, then CR is low.
- If generation is medium, then CR is medium.
- If generation is high, then CR is high.
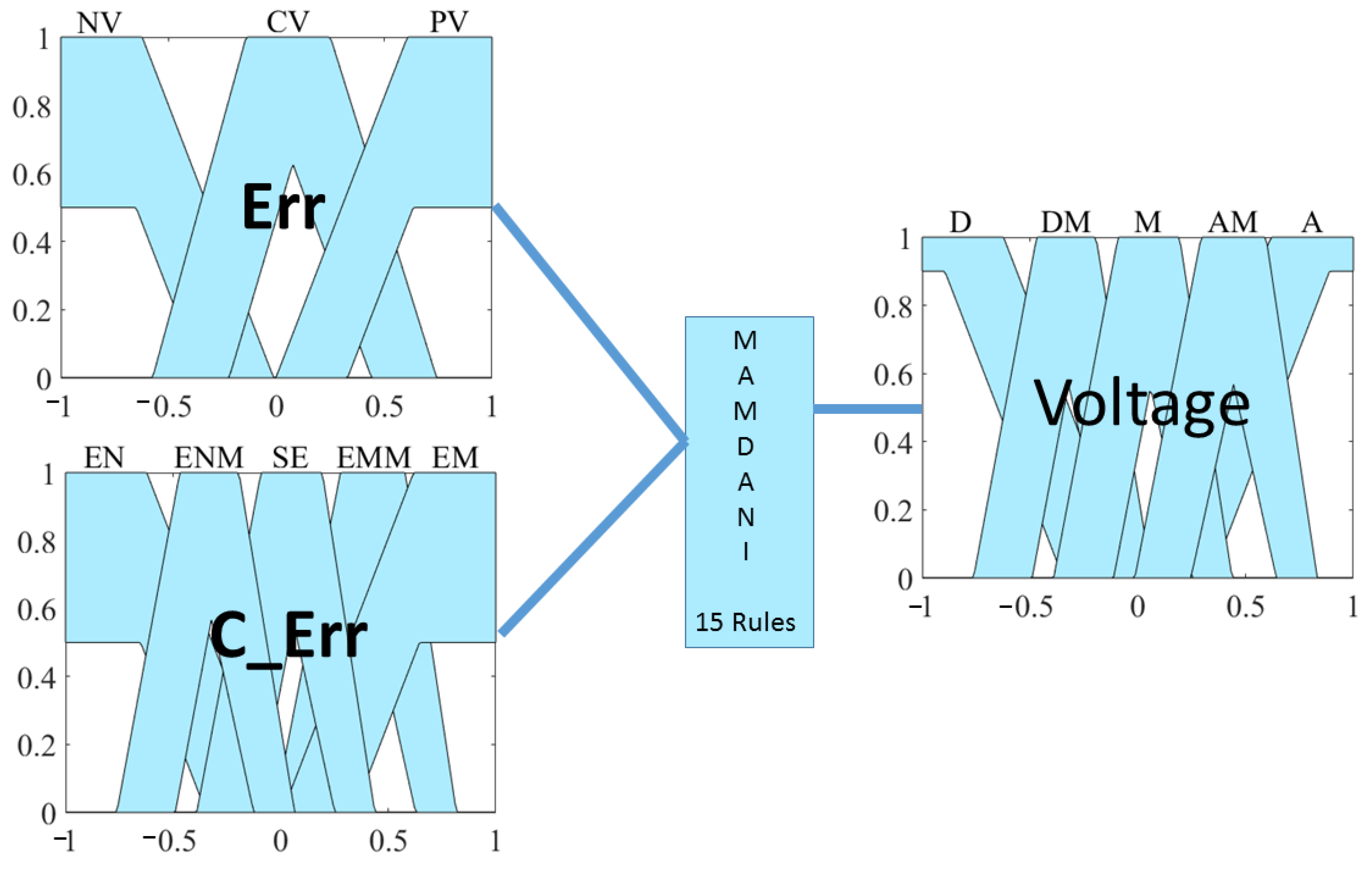
5. Interval Type-2 Fuzzy Systems Controller
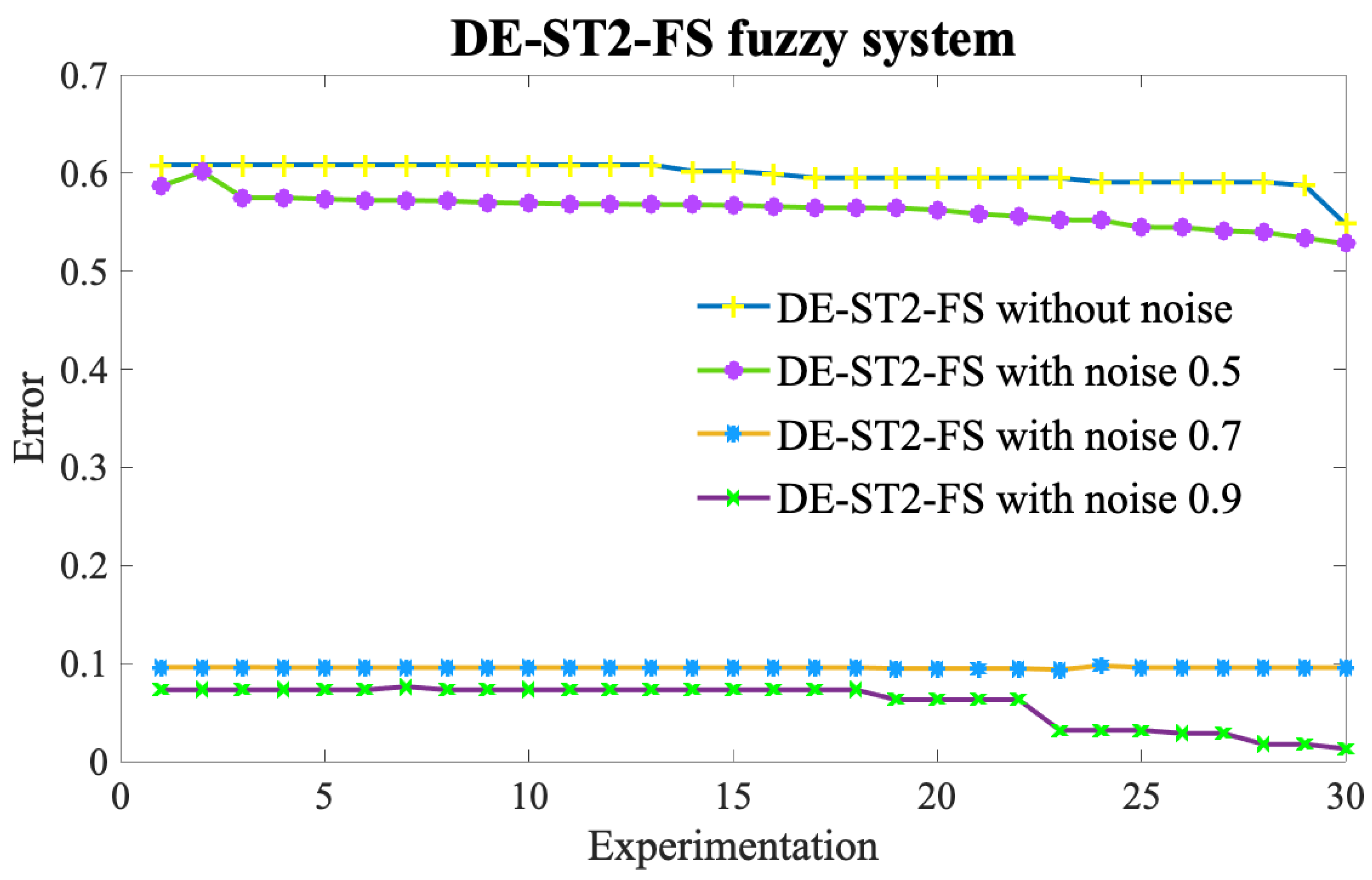
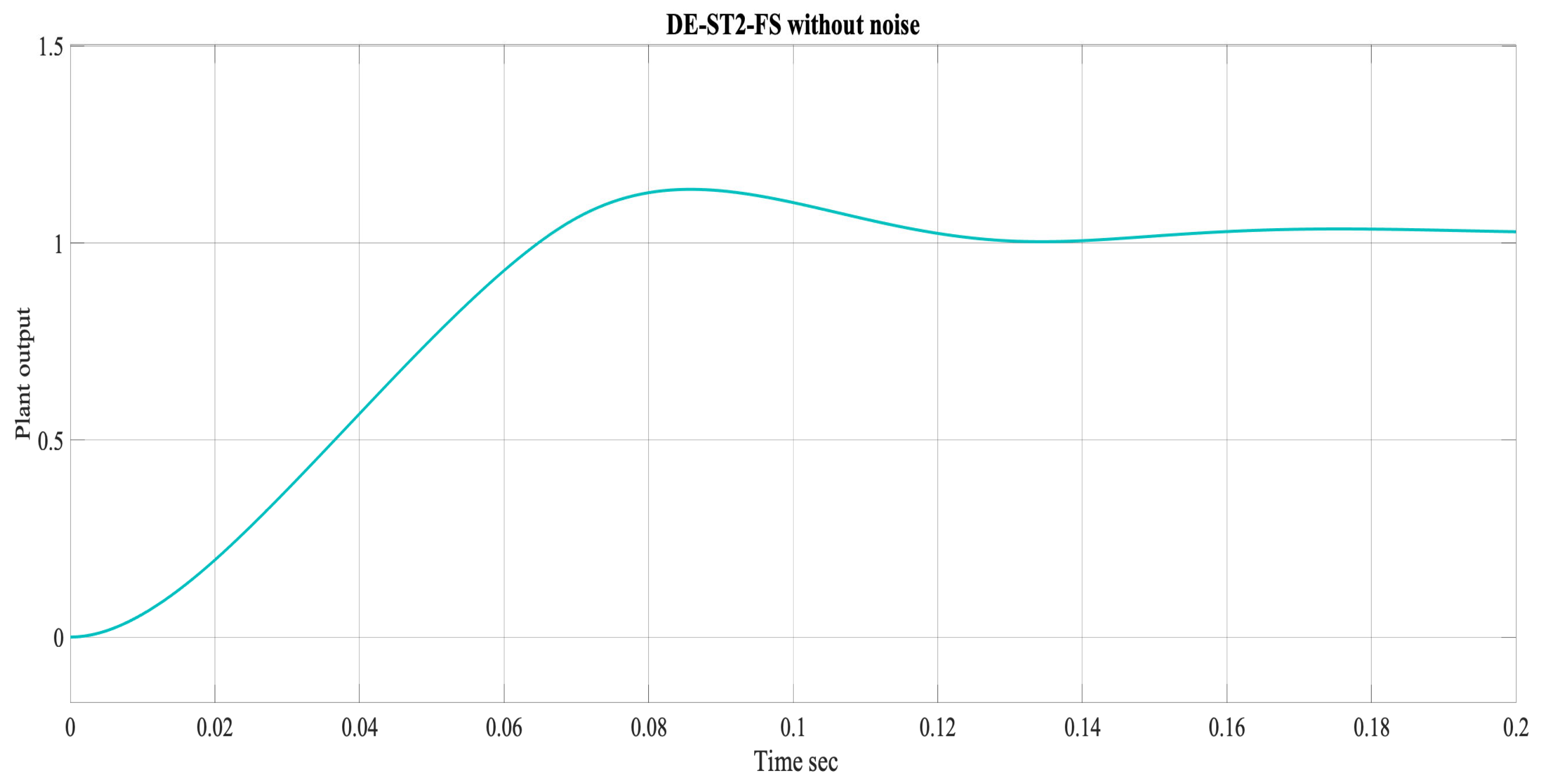
6. Results and Statistical Comparison
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rossi, F.; Sembiring, J.P.; Jayadi, A.; Putri, N.U.; Nugroho, P. Implementation of Fuzzy Logic in PLC for Three- Story Elevator Control System. In Proceedings of the 2021 International Conference on Computer Science, Information Technology, and Electrical Engineering (ICOMITEE), Banyuwangi, Indonesia, 27–28 October 2021; pp. 179–185. [Google Scholar] [CrossRef]
- Krishnan, R.S.; Julie, E.G.; Robinson, Y.H.; Raja, S.; Kumar, R.; Thong, P.H.; Son, L.H. Fuzzy Logic based Smart Irrigation System using Internet of Things. J. Clean. Prod. 2019, 252, 119902. [Google Scholar] [CrossRef]
- Belman-Flores, J.M.; Rodríguez-Valderrama, D.A.; Ledesma, S.; García-Pabón, J.J.; Hernández, D.; Pardo-Cely, D.M. A Review on Applications of Fuzzy Logic Control for Refrigeration Systems. Appl. Sci. 2022, 12, 1302. [Google Scholar] [CrossRef]
- Chen, X.; Hu, Z.; Sun, Y. Fuzzy Logic Based Logical Query Answering on Knowledge Graphs. Proc. Conf. AAAI Artif. Intell. 2022, 36, 3939–3948. [Google Scholar] [CrossRef]
- Almadi, A.I.M.; Al Mamlook, R.E.; Almarhabi, Y.; Ullah, I.; Jamal, A.; Bandara, N. A Fuzzy-Logic Approach Based on Driver Decision-Making Behavior Modeling and Simulation. Sustainability 2022, 14, 8874. [Google Scholar] [CrossRef]
- Zhao, Z.-H. Improved fuzzy logic control-based energy management strategy for hybrid power system of FC/PV/battery/SC on tourist ship. Int. J. Hydrogen Energy 2022, 47, 9719–9734. [Google Scholar] [CrossRef]
- Kenjrawy, H.; Makdisie, C.; Houssamo, I.; Mohammed, N. New Modulation Technique in Smart Grid Interfaced Multilevel UPQC-PV Controlled via Fuzzy Logic Controller. Electronics 2022, 11, 919. [Google Scholar] [CrossRef]
- Atoui, A.; Boucherit, M.S.; Benmansour, K.; Barkat, S.; Djerioui, A.; Houari, A. Unified fuzzy logic controller and power management for an isolated residential hybrid PV/diesel/battery energy system. Clean Energy 2022, 6, 671–681. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, Z.; Guo, X.; Wei, Z. An improved kinetic energy control strategy for power smoothing of PMSG-WECS based on low pass filter and fuzzy logic controller. Electr. Power Syst. Res. 2023, 214, 108816. [Google Scholar] [CrossRef]
- Afaq, M.; Jebelli, A.; Ahmad, R. An Intelligent Thermal Management Fuzzy Logic Control System Design and Analysis Using ANSYS Fluent for a Mobile Robotic Platform in Extreme Weather Applications. J. Intell. Robot. Syst. 2023, 107, 11. [Google Scholar] [CrossRef]
- Ahmad, I.; M’Zoughi, F.; Aboutalebi, P.; Garrido, I.; Garrido, A.J. Fuzzy logic control of an artificial neural network-based floating offshore wind turbine model integrated with four oscillating water columns. Ocean Eng. 2023, 269, 113578. [Google Scholar] [CrossRef]
- Moutchou, R.; Abbou, A.; Jabri, B.; Rhaili, S.E.; Chigane, K. Adaptive Fuzzy Logic Controller for MPPT Control in PMSG Wind Turbine Generator. In Artificial Intelligence-Based Smart Power Systems; IEEE Press: Piscataway, NJ, USA, 2022; pp. 129–140. [Google Scholar] [CrossRef]
- Wang, X.; Xu, B.; Guo, Y. Fuzzy Logic System-Based Robust Adaptive Control of AUV with Target Tracking. Int. J. Fuzzy Syst. 2022, 25, 338–346. [Google Scholar] [CrossRef]
- Liu, J.; Wei, T.; Chen, N.; Wu, J.; Xiao, P. Fuzzy Logic PID Controller with Both Coefficient and Error Modifications for Digitally-Controlled DC–DC Switching Converters. J. Electr. Eng. Technol. 2023, 1–12. [Google Scholar] [CrossRef]
- Vijayalakshmi, K.; Kn, S. Intelligent Control of Switched Reluctance Motor Using Fuzzy Logic and SMC Controller for EV Applications. Int. J. Eng. Educ. 2023, 4, 42–57. [Google Scholar] [CrossRef]
- Tan, D.W.W.W. A simplified type-2 fuzzy logic controller for real-time control. ISA Trans. 2006, 45, 503–516. [Google Scholar] [CrossRef]
- Castillo, O.; Aguilar, L.; Cázarez, N.; Cárdenas, S. Systematic design of a stable type-2 fuzzy logic controller. Appl. Soft Comput. 2008, 8, 1274–1279. [Google Scholar] [CrossRef]
- Wu, D.; Tan, W. A type-2 fuzzy logic controller for the liquid-level process. In Proceedings of the 2004 IEEE International Conference on Fuzzy Systems (IEEE Cat. No. 04CH37542), Budapest, Hungary, 25–29 July 2005; IEEE Press: Piscataway, NJ, USA, 2005. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Y.; Cheng, J.; Yan, H.; Shi, K. Improved filtering of interval type-2 fuzzy systems over Gilbert-Elliott channels. Inf. Sci. 2023, 627, 132–146. [Google Scholar] [CrossRef]
- Bernal, E.; Lagunes, M.L.; Castillo, O.; Soria, J.; Valdez, F. Optimization of Type-2 Fuzzy Logic Controller Design Using the GSO and FA Algorithms. Int. J. Fuzzy Syst. 2020, 23, 42–57. [Google Scholar] [CrossRef]
- Sain, D.; Praharaj, M.; Bosukonda, M.M. A simple modelling strategy for integer order and fractional order interval type-2 fuzzy PID controllers with their simulation and real-time implementation. Expert Syst. Appl. 2022, 202, 117196. [Google Scholar] [CrossRef]
- Laib, A.; Talbi, B.; Krama, A.; Gharib, M. Hybrid Interval Type-2 Fuzzy PID+I Controller for a Multi-DOF Oilwell Drill-String System. IEEE Access 2022, 10, 67262–67275. [Google Scholar] [CrossRef]
- Saraswat, R.; Suhag, S. Type-2 fuzzy logic PID control for efficient power balance in an AC microgrid. Sustain. Energy Technol. Assess. 2023, 56, 103048. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, T.; Cao, J.; Li, P. Design of an interval type-2 fuzzy neural network sliding mode robust controller for higher stability of magnetic spacecraft attitude control. ISA Trans. 2023; in press. [Google Scholar] [CrossRef]
- Jovanović, A.; Kukić, K.; Stevanović, A.; Teodorović, D. Restricted crossing U-turn traffic control by interval Type-2 fuzzy logic. Expert Syst. Appl. 2023, 211, 118613. [Google Scholar] [CrossRef]
- Wijayasekara, D.; Linda, O.; Manic, M. Shadowed Type-2 Fuzzy Logic Systems. In Proceedings of the 2013 IEEE Symposium on Advances in Type-2 Fuzzy Logic Systems (T2FUZZ), Singapore, 16–19 April 2013; pp. 15–22. [Google Scholar] [CrossRef]
- Castillo, O.; Peraza, C.; Ochoa, P.; Amador-Angulo, L.; Melin, P.; Park, Y.; Geem, Z.W. Shadowed Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search and Differential Evolution for Optimal Design of Fuzzy Controllers. Mathematics 2021, 9, 2439. [Google Scholar] [CrossRef]
- Tahayori, H.; Sadeghian, A. Shadowed fuzzy sets: A framework with more freedom degrees for handling uncertainties than interval type-2 fuzzy sets and lower computational complexity than general type-2 fuzzy sets. In New Concepts and Applications in Soft Computing; Springer: Berlin/Heidelberg, Germany, 2013; pp. 97–117. [Google Scholar] [CrossRef]
- Zhou, J.; Lai, Z.; Miao, D.; Gao, C.; Yue, X. Multigranulation rough-fuzzy clustering based on shadowed sets. Inf. Sci. 2018, 507, 553–573. [Google Scholar] [CrossRef]
- El-Hawy, M.A.; Wassif, K.T.; Hefny, H.; Hassan, H.A. A proposed shadowed intuitionistic fuzzy numbers. In Proceedings of the 2015 Tenth International Conference on Computer Engineering & Systems (ICCES), Cairo, Egypt, 23–24 December 2015; pp. 153–160. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Wagner, C.; Hagras, H. Toward General Type-2 Fuzzy Logic Systems Based on zSlices. IEEE Trans. Fuzzy Syst. 2010, 18, 637–660. [Google Scholar] [CrossRef]
- Coupland, S.; John, R. Geometric Type-1 and Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 2007, 15, 3–15. [Google Scholar] [CrossRef]
- Mendel, J.M.; Liu, F.; Zhai, D. α-Plane Representation for Type-2 Fuzzy Sets: Theory and Applications. IEEE Trans. Fuzzy Syst. 2009, 17, 1189–1207. [Google Scholar] [CrossRef]
- Mendel, J.M.; John, R.I.; Liu, F. Interval Type-2 Fuzzy Logic Systems Made Simple. IEEE Trans. Fuzzy Syst. 2006, 14, 808–821. [Google Scholar] [CrossRef]
- Ontiveros, E.; Melin, P.; Castillo, O. High order α-planes integration: A new approach to computational cost reduction of General Type-2 Fuzzy Systems. Eng. Appl. Artif. Intell. 2018, 74, 186–197. [Google Scholar] [CrossRef]
- Dorantes, P.N.M.; Mendez, G.M. Non-iterative Wagner-Hagras General Type-2 Mamdani Singleton Fuzzy Logic System Optimized by Central Composite Design in Quality Assurance by Image Processing. In Recent Trends on Type-2 Fuzzy Logic Systems: Theory, Methodology and Applications; Springer International Publishing: Cham, Switzerland, 2023; pp. 201–216. [Google Scholar] [CrossRef]
- Pedrycz, W. From fuzzy sets to shadowed sets: Interpretation and computing. Int. J. Intell. Syst. 2008, 24, 48–61. [Google Scholar] [CrossRef]
- Pedrycz, W.; Song, M. Granular fuzzy models: A study in knowledge management in fuzzy modeling. Int. J. Approx. Reason. 2012, 53, 1061–1079. [Google Scholar] [CrossRef]
- Pedrycz, W.; Vukovich, G. Granular computing in the development of fuzzy controllers. Int. J. Intell. Syst. 1999, 14, 419–447. [Google Scholar] [CrossRef]
- Price, K.V.; Storn, R.M.; Lampinen, J.A. The differential evolution algorithm. In Differential Evolution: A Practical Approach to Global Optimization; Springer: Berlin/Heidelberg, Germany, 2006; pp. 37–134. [Google Scholar] [CrossRef]
- Wang, G.-G.; Gao, D.; Pedrycz, W. Solving Multiobjective Fuzzy Job-Shop Scheduling Problem by a Hybrid Adaptive Differential Evolution Algorithm. IEEE Trans. Ind. Inform. 2022, 18, 8519–8528. [Google Scholar] [CrossRef]
- Lin, H.; Han, Y.; Cai, W.; Jin, B. Traffic Signal Optimization Based on Fuzzy Control and Differential Evolution Algorithm. IEEE Trans. Intell. Transp. Syst. 2022; 1–12, accepted. [Google Scholar] [CrossRef]
- Gouda, S.K.; Mehta, A.K. Software cost estimation model based on fuzzy C-means and improved self adaptive differential evolution algorithm. Int. J. Inf. Technol. 2022, 14, 2171–2182. [Google Scholar] [CrossRef]
- Korkidis, P.; Dounis, A. On training non-uniform fuzzy partitions for function approximation using differential evolution: A study on fuzzy transform and fuzzy projection. Inf. Sci. 2023, 619, 867–888. [Google Scholar] [CrossRef]
- Ochoa, P.; Castillo, O.; Melin, P.; Castro, J.R. Interval Type-3 Fuzzy Differential Evolution for Parameterization of Fuzzy Controllers. Int. J. Fuzzy Syst. 2023, 25, 1360–1376. [Google Scholar] [CrossRef]
- Chairez, I.; Utkin, V. Direct Current Motor Position Control by a Sliding Mode Controlled Dual Three-Phase AC-DC Power Converter. IFAC-PapersOnLine 2022, 55, 333–338. [Google Scholar] [CrossRef]
- Top, A.; Gökbulut, M. A novel period–based method for the measurement direct current motor velocity using low-resolver encoder. Trans. Inst. Meas. Control 2022, 45, 711–722. [Google Scholar] [CrossRef]
- Runjing, Z.; Yu, D.; Weiting, Y. Application of Fuzzy-PI Controller with Feedforward Control in Direct Current Motor Servo System. In Proceedings of the 2005 International Conference on Neural Networks and Brain, Beijing, China, 13–15 October 2005; Volume 2, pp. 1262–1267. [Google Scholar] [CrossRef]
- Karabacak, Y.; Uysal, A. Fuzzy logic controlled brushless direct current motor drive design and application for regenerative braking. In Proceedings of the 2017 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P.; Valdez, F.; Soria, J.; Ontiveros-Robles, E.; Peraza, C.; Ochoa, P. Shadowed Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search and Differential Evolution Algorithms. Algorithms 2019, 12, 17. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C_Err | ||||||
|---|---|---|---|---|---|---|
| EN | ENM | SE | EMM | EM | ||
| Err | NV | D | D | D | D | DM |
| CV | AM | AM | M | DM | DM | |
| PV | AM | A | A | A | A | |
| Parameter Configuration | |
|---|---|
| NP | 20 |
| D | 25 |
| GEN | 20 |
| F | 0.5 |
| CR | Dynamic |
| Number of experiments | 30 |
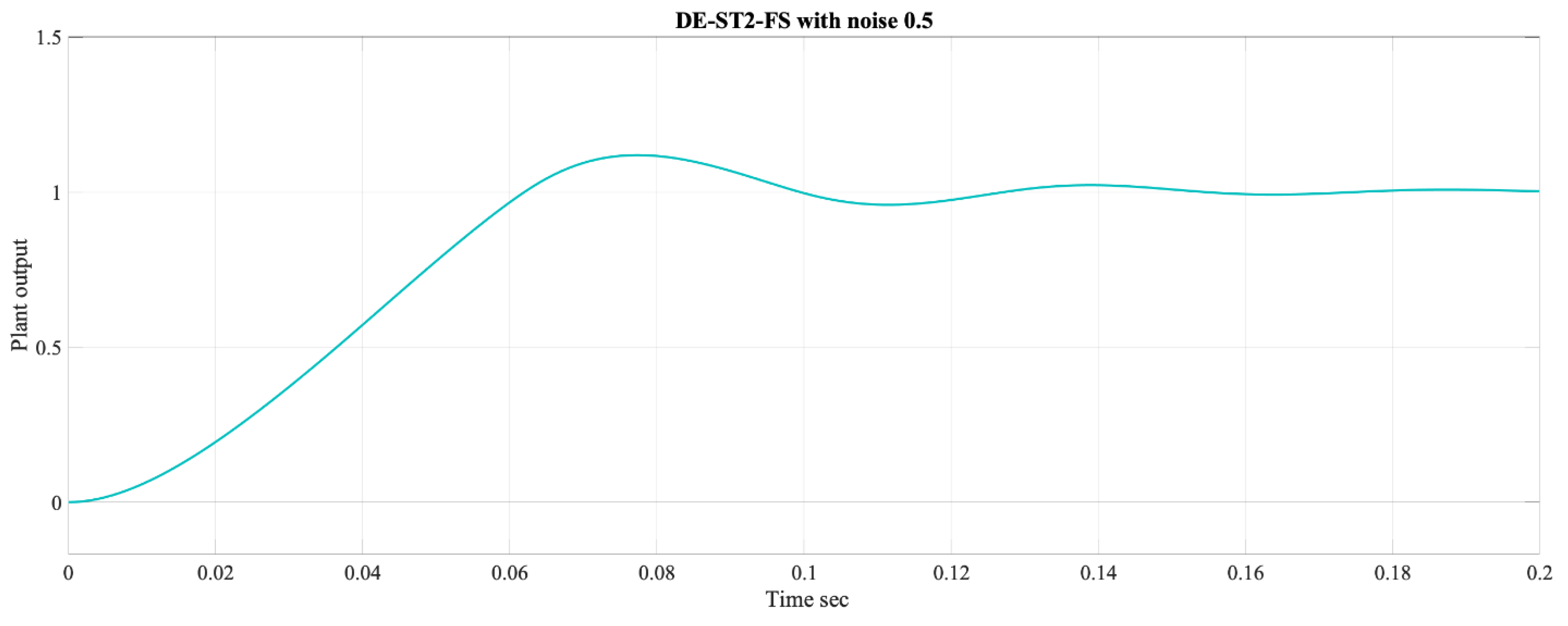
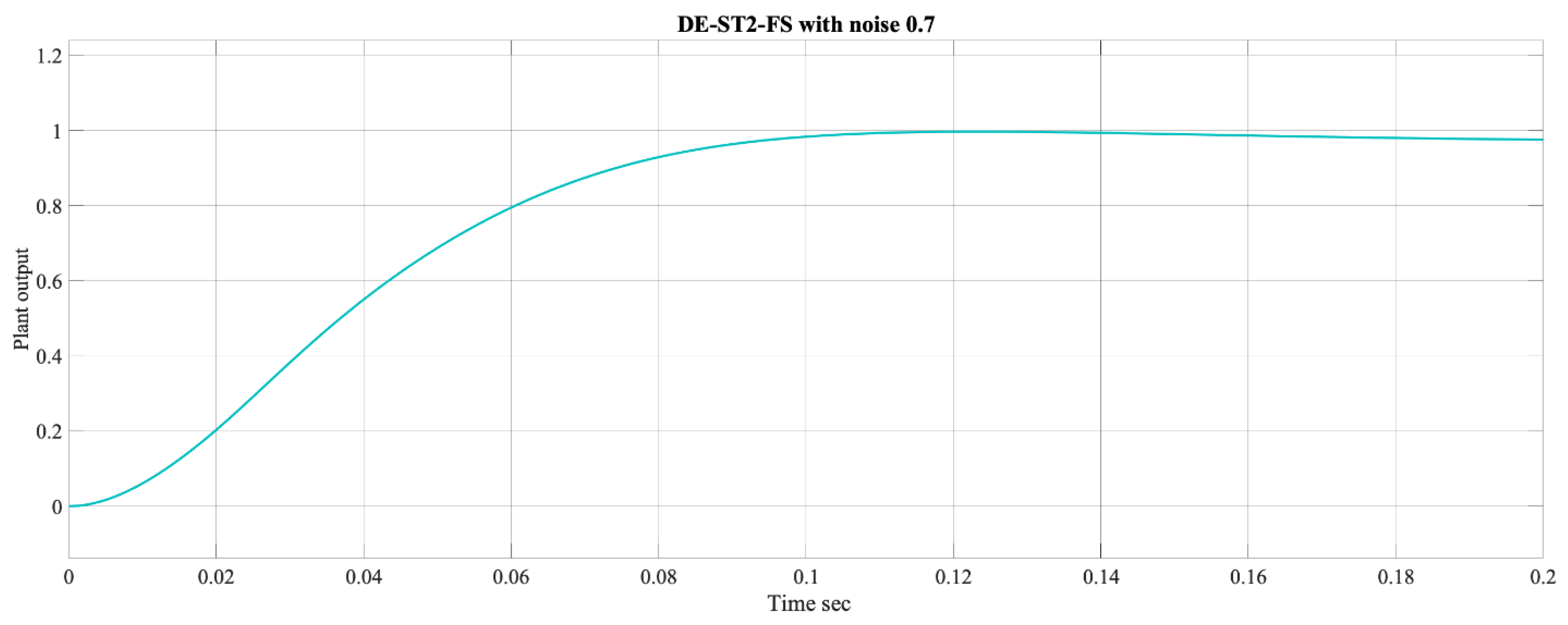
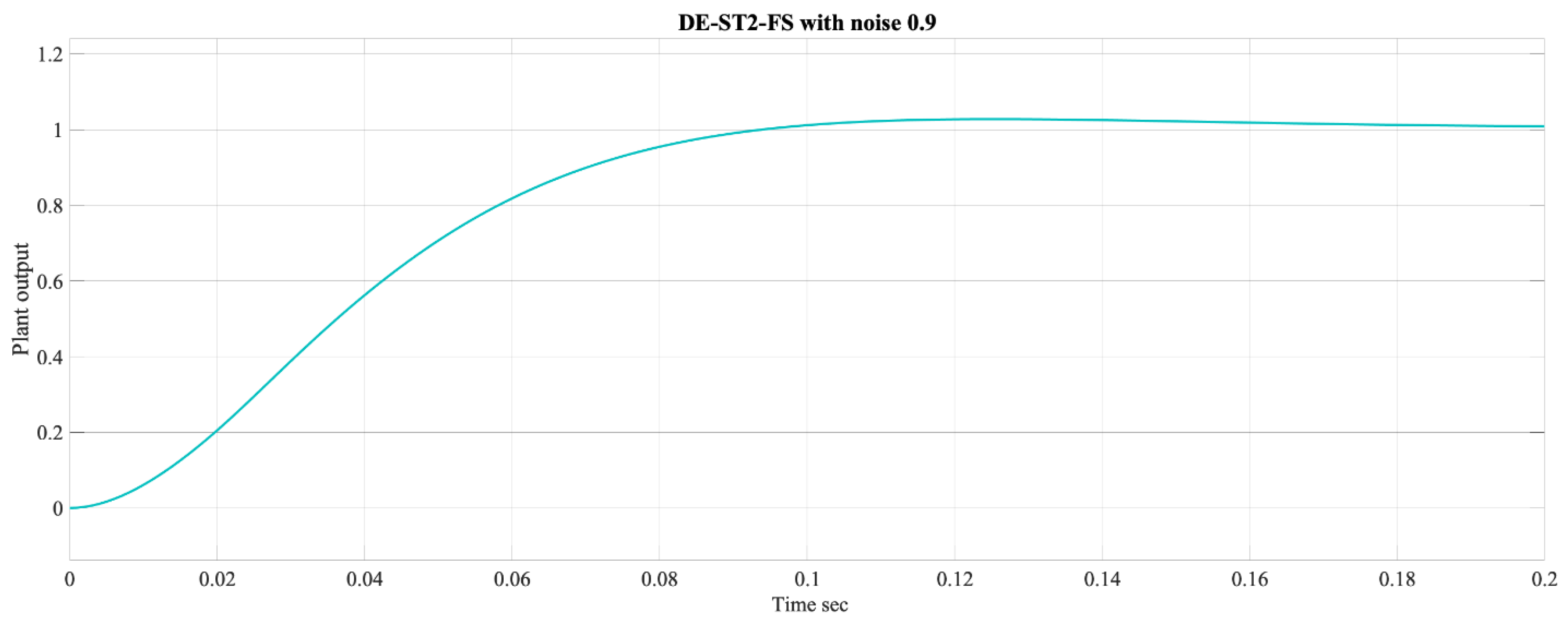
| DE-ST2-FS without Noise | DE-ST2-FS with Noise 0.5 | DE-ST2-FS with Noise 0.7 | DE-ST2-FS with Noise 0.9 | |
|---|---|---|---|---|
| Min. | 5.48 × | 5.28 × | 9.38 × | 1.31 × |
| Max. | 6.08 × | 6.01 × | 9.78 × | 7.63 × |
| Average | 5.99 × | 5.63 × | 9.58 × | 5.92 × |
| Standard D. | 1.23 × | 1.55 × | 6.22 × | 2.15 × |
| Parameter | Value |
|---|---|
| Level of Confidence | 95% |
| Alpha α | 5% |
| µ1 < µ2 | |
| µ1 ≥ µ2 | |
| Critical Value | −1.645 |
| Case Study | Z Value | Evidence | ||
|---|---|---|---|---|
| Controller | DE-ST2-FS with noise 0.9 | DE-ST2-FS without noise | −119.3636 | Significant |
| DE-ST2-FS with noise 0.9 | DE-ST2-FS with noise 0.5 | −104.1108 | Significant | |
| DE-ST2-FS with noise 0.9 | DE-ST2-FS with noise. 0.7 | −9.3201 | Significant |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ochoa, P.; Peraza, C.; Castillo, O.; Geem, Z.W. A Shadowed Type-2 Fuzzy Approach for Crossover Parameter Adaptation in Differential Evolution. Algorithms 2023, 16, 279. https://doi.org/10.3390/a16060279
Ochoa P, Peraza C, Castillo O, Geem ZW. A Shadowed Type-2 Fuzzy Approach for Crossover Parameter Adaptation in Differential Evolution. Algorithms. 2023; 16(6):279. https://doi.org/10.3390/a16060279
Chicago/Turabian StyleOchoa, Patricia, Cinthia Peraza, Oscar Castillo, and Zong Woo Geem. 2023. "A Shadowed Type-2 Fuzzy Approach for Crossover Parameter Adaptation in Differential Evolution" Algorithms 16, no. 6: 279. https://doi.org/10.3390/a16060279
APA StyleOchoa, P., Peraza, C., Castillo, O., & Geem, Z. W. (2023). A Shadowed Type-2 Fuzzy Approach for Crossover Parameter Adaptation in Differential Evolution. Algorithms, 16(6), 279. https://doi.org/10.3390/a16060279