1. Introduction
E-commerce, i.e., the purchase of goods or services over the internet, is a continuously growing business sector. In the 27 member states of the European Union (EU), the percentage of individuals that have ordered something over the internet in the past 12 months has risen from 36% in 2010 to 49% in 2015 and even further to 60% in 2021 [
1,
2]. Among the EU member states, with 92% of their citizens having purchased something online in 2021, Norway is leading this growth process. Denmark, the Netherlands, and Sweden are following with 91%, 89%, and 87%, respectively. One of the main reasons for this development is that e-commerce has brought many benefits to consumers over the past decade. This includes a wide range of products at competitive prices and easy-to-use and secure payment options. Due to these benefits, many people buy goods or services online on a regular basis. In 2021, 38% of the individuals living in the EU purchased something online one to five times within 3 months, while 9% of the individuals purchased something online more than 10 times. Considering clothing, online sales have become a well-established sales channel, as 39% of the individuals living in the EU ordered clothing online in 2021. Deliveries from restaurants or fast-food chains purchased online have spiked in 2021 due to the COVID-19 pandemic. While 17% of the individuals living in the EU ordered a meal online in 2020, this number increased dramatically to 24% in 2021 [
3]. The Dutch were the most active in ordering meals online (53%). Internet sales of food and beverages (including meal kits) account only for a comparably small portion of e-commerce sales. Only 18% of the individuals of the EU member states ordered groceries online in 2021. This value varies strongly among the EU member states: 28% in The Netherlands, 10% in Germany, and only 3% in Serbia [
3]. As a survey conducted by Nielsen [
4] in 2015 shows, a similar strong trend towards the online sales of groceries can be observed worldwide. The global survey points out that around a quarter of all respondents are already ordering grocery products online for home delivery and that 55% are willing to do so in the future. Although only a small portion of grocery sales are currently conducted online, there is increasing pressure for all businesses, especially supermarket chains, to have an online presence. During the early stages of the COVID-19 pandemic, the home delivery of groceries and essential supplies became an effective measure to protect medically vulnerable persons [
5].
In general, a large variety of groceries are sold online. Accordingly, there are several different delivery modes necessary due to the different transport requirements of the various grocery categories [
6]. Beverages and non-perishable foods can be shipped with traditional parcel services. Some perishable products, such as meat, for which the correct temperature has to be maintained during shipment, can be shipped in isolated packages together with thermal packs or dry ice. This delivery approach is less practical for most groceries that are bought on a daily basis, as frozen goods, vegetables, fruits, and milk-based products are very sensitive to temperature changes and their quality quickly deteriorates when not being stored at the correct temperatures. The shipment of larger grocery purchases via postal services is also impractical due to size and weight.
Therefore, many supermarket chains currently offer home delivery services where the goods are transported in temperature-controlled vehicles. Additionally, “click-and-collect” services, where the customers can pick up their purchases at a physical location, are becoming more popular. When offering home delivery services, the grocery supply chain does no longer end at the supermarket shelves, but is extended towards the customers’ doors. Supermarkets that offer such services are now facing a “last-mile” delivery problem that must be dealt with efficiently. The company must ensure that the cold chain is not interrupted, and therefore the ordered products cannot be dropped off at the customer’s door unattended. Hence, the customer must be present when the delivery arrives. A common way to approach this last-mile delivery problem, from the supermarket or distribution center to the customer, is that the grocery vendor and the customer mutually agree on a delivery time slot during which the arrival of the delivery as well as the presence of the customer can be assured.
In the scientific literature, this kind of delivery service is widely known as the attended home delivery (AHD) problem [
7]. AHD services offer several benefits for the customer, such as the nonstop opening hours of the online store, the avoidance of traveling to the brick-and-mortar stores, almost no interruptions of the cold chain when buying groceries, and no carrying of heavy or bulky items. Despite the huge potential and benefits for customers, online grocery shopping services pose several interrelated logistics and optimization challenges to the grocer. Deliveries may be dispatched from brick-and-mortar stores where the purchases are picked by store employees and then handed over to a delivery driver [
8]. At a certain scale, the utilization of dedicated distribution centers, as commonly used by e-commerce giants, is a reasonable alternative [
9]. So-called “dark stores”, i.e., supermarkets that are not open to the public but are only used for picking online grocery orders, are a common in-between solution.
This work focuses on the online shopping service of one of the world’s leading grocery chains. However, the basic principle of AHD services applies to many other applications besides groceries, such as maintenance and repair services [
10], on-demand mobility services [
11], or patient home-health-care services [
12]. In this work, we provide a general framework for the operational planning of the “last-mile” delivery of groceries purchased online.
For a better understanding, we break down the planning and fulfillment process of the e-grocer into four phases (see also reference [
13]). The first phase is called the
tactical planning phase, which happens several months/weeks before delivery. During this period, the fleet of delivery vehicles is defined and drivers are assigned to them. Several weeks up to days/hours before delivery starts the
ordering phase, in which the grocery chain accepts orders and starts planning the deliveries. Once all orders are placed (usually days/hours before delivery), the company prepares the accepted orders for delivery during the
preparation phase (see Vazquez-Noguerol et al. [
9] for a model that describes the order picking at a central warehouse). Finally, during the
delivery phase, the delivery vehicles execute the orders according to the delivery schedule.
During the ordering phase, customers place their grocery orders using the company’s website or mobile app. This interaction with customers through the online store holds several computational challenges. Clearly, the website should respond to the customer requests with as little delay as possible to ensure a smooth booking process. The grocer must therefore decide if new orders can be accepted as quickly as possible, which means solving an online variant of a vehicle routing problem with time windows (VRPTW). From a computational point of view, the run time requirements for the optimization problems occurring in the ordering phase are much more challenging than in the other phases.
This work is therefore dedicated to providing a framework for tackling the iterative planning process during the ordering phase. The rest of this paper is organized as follows: In
Section 2, we review the relevant literature. A summary of the planning steps that must be handled during the ordering phase is given in
Section 3. Furthermore, formal models of the underlying mathematical problems are provided in this section. We propose our approaches based on local search operations and mixed-integer linear programming (MILP) formulations in
Section 4 and, furthermore, we give suggestions on how to combine them to (i) decide acceptance of new orders, and to (ii) iteratively build the delivery schedule as new orders are being accepted. In
Section 5, we present the set-up of our computational experiments and discuss their results. Finally,
Section 6 concludes the paper.
3. Problem Description and Formal Model
In this section, we provide a description of the ordering phase being the crucial part of the AHD planning process. First, in
Section 3.1, we discuss the tasks that must be performed during the different steps of the ordering phase. We proceed with a formal description of the VRPTW in
Section 3.2, continue with definitions for arrival times and feasible points of insertion in
Section 3.3, and finally, state the SOP in
Section 3.4.
3.1. Computational Steps during the Ordering Phase
When customers place their orders, the company must first decide if the order can be accepted, and, if the order is accepted, integrate the order into the delivery schedule. However, the naive approach of solving a new VRPTW instance from scratch for each new order is far from being applicable in an online environment, even when using comparatively fast meta-heuristics. An up-to-date taxonomic review of meta-heuristics for the most common variants of the vehicle routing problem can be found in Elshaer and Awad [
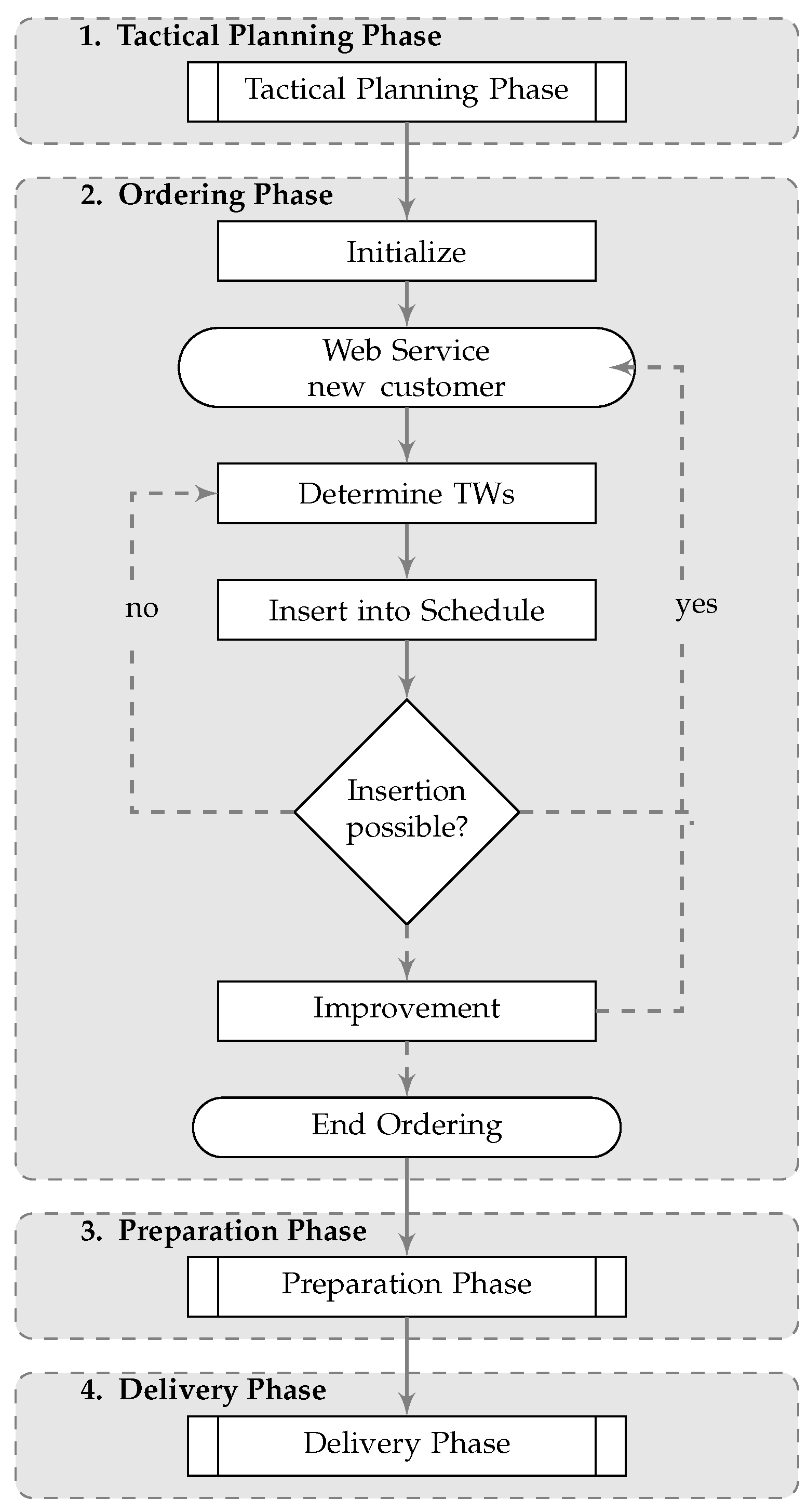
34]. To efficiently deal with the ordering process, we propose to split the computations during the ordering phase into the following four steps (summarized in
Figure 1).
3.1.1. Initialization Step
In the first step, the web service is being prepared to accept customer requests. Therefore, a new VRPTW instance is created, including all available vehicles with corresponding operation times. Since no orders have been placed yet, this results in an empty delivery schedule with a fixed fleet of vehicles.
3.1.2. Determination Step
When a new customer wants to place an order, the system has to determine the available delivery time windows that can be offered to this customer. This process has to be performed in milliseconds as customers are usually impatient when they have to wait for technical reasons. Note that for calculating the availabilities of time windows, the routing service has to calculate the travel times between all pairs of customers based on their provided addresses. The underlying mathematical problem of this step is the slot optimization problem (SOP) [
23].
Optionally, for reasons of profit-maximizing, some available time windows can be hidden from the customer or be offered at different rates. In this work, we do not consider any (dynamic) slotting and pricing because the policy of our partnering grocery chain is to offer available time slots on a “first-come-first-served” basis, and each customer is accepted if possible. Nevertheless, we refer to
Section 2.3, which provides a brief literature review about this topic.
3.1.3. Insertion Step
Given the list of time slots (determined in the previous step), the customer now chooses his or her preferred one. As it can take some time for the customer to decide on a time window or because many customers are booking simultaneously, the system must double-check if the selected time slot is still available. If the answer is yes, the customer can be added to the working schedule. If the answer is no, the system calls the determination step again to find an updated set of available time windows for the customer. This must be performed every time a customer wants to place an order. Note that we do not allow any simultaneous processing of the schedule to avoid queuing issues.
3.1.4. Improvement Step
In the last step, optimization techniques are applied to improve the schedule. These are important for two reasons: (a) to offer as many time windows as possible to the customers; (b) to serve as many customers as possible. This can be achieved by changing the assignments of customers to vehicles and, furthermore, by improving the routes of the delivery vehicles. We choose to minimize the total travel time as the objective function as this has proven to be reasonable in practice. During times with high customer frequencies, the improvement step can also be skipped or only invoked after a certain number of insertion steps to further improve the run time. At any time of the process, we allow for having exactly one working schedule in the system.
The time window determination step, as well as the insertion step, requires solving a feasibility version of the VRPTW. In contrast to that, the optimization version of the VRPTW must be solved during the improvement step.
Our approach is aimed at accepting as many customers as possible on a “first-come-first-served” basis, while offering each customer the largest possible selection of delivery time windows. Ideally, the working schedule would contain few large chunks of idle time rather than many short ones. As this is intractable to model in practice, we choose the
total travel time as the objective function to avoid introducing an unnecessarily complicated model. Although Bent and Van Hentenryck [
35] show that the use of a consensus function in their multiple-scenario approach results in more robust schedules and the acceptance of more customers, their approach is not applicable to our problem, as maintaining several scenarios would introduce additional complexity and require too much computational effort.
3.2. Vehicle Routing Problem with Time Windows
The vehicle routing problem with time windows (VRPTW) is concerned with finding a delivery schedule having the minimal total travel time for a fleet of vehicles with given capacity constraints to deliver goods to customers within assigned time windows. The problem is known to be NP-hard [
36].
A VRPTW instance is defined by a set of customers , with a corresponding order weight function , and a service time function . In the considered AHD service, the individual items of an order are consolidated into several boxes of fixed size. The number of required boxes defines the corresponding order weight .
Secondly, the VRPTW consists of a set of time windows , where each time window is defined through the times of its begin and end . We assume that the time windows are unique, i.e., there do not exist time windows with and . We consider overlapping and non-overlapping time windows. Two time windows u and v are non-overlapping if and only if or . Further, a function is given that assigns to each customer a time window, during which the delivery vehicle has to arrive at the customer. All vehicles depart from and return to a depot d. The travel time between all points is given by a function , where we set the travel time from a customer a to itself to 0, i.e., .
Each vehicle has an assigned tour. A tour contains n customers in the order they are visited by the vehicle and has an assigned capacity . Furthermore, each tour has assigned start and end times that we denote as start and end, respectively. Hence, the vehicle assigned to tour can leave from the depot d no earlier than start and must return to the depot no later than end. A schedule consists of tours.
3.3. Arrival Times and Feasibility
In this section, we define the feasibility of a schedule as well as the feasibility of inserting a new order into an existing schedule.
3.3.1. Earliest and Latest Arrival Times
We consider a fixed tour
, where 0 and
denote the depot
d and
denote the customers assigned to the tour. We use the concept of earliest and latest arrival time
and
, as in reference [
37], which give the earliest (latest) time at which the vehicle may arrive at customer
i, while not violating time window and travel time constraints on the remaining tour:
Here, we assume
.
Following the definitions, vehicles always leave as early as possible from the depot. This generates unnecessary idle time before serving the first customer of a tour. Hence, once the delivery schedule is finalized, we alter the start times of the vehicles accordingly.
A schedule
is
feasible if all its tours are feasible. A tour
is
feasible if it satisfies both of the following conditions:
While TFEAS() ensures that the arrival times at each customer assigned to tour are within their assigned time windows, CFEAS() guarantees that the capacity of is not exceeded. Note that we do not need to check for TFEAS() if as this is ensured by the definition of .
3.3.2. Insertion Points
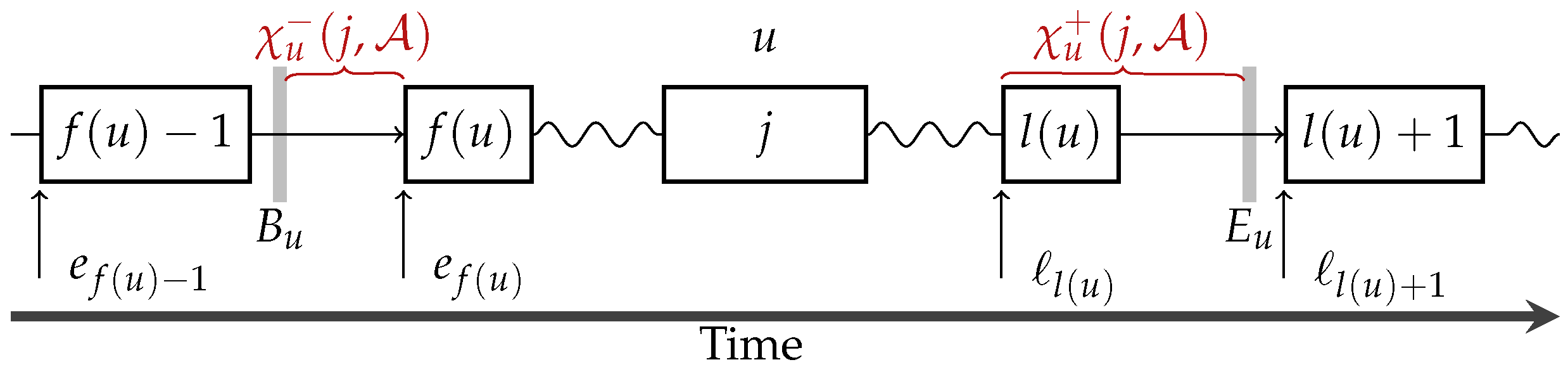
The set
is required for the approaches applied in the time window determination step and defines after which customers we try to insert customer
j into
during its (pre)assigned time slot. Accordingly, we define:
where
The index
defines the first customer (or the depot) on tour
after which customer
j could potentially be inserted. Likewise,
defines the last customer. Clearly, if
, the insertion of
j during
is infeasible.
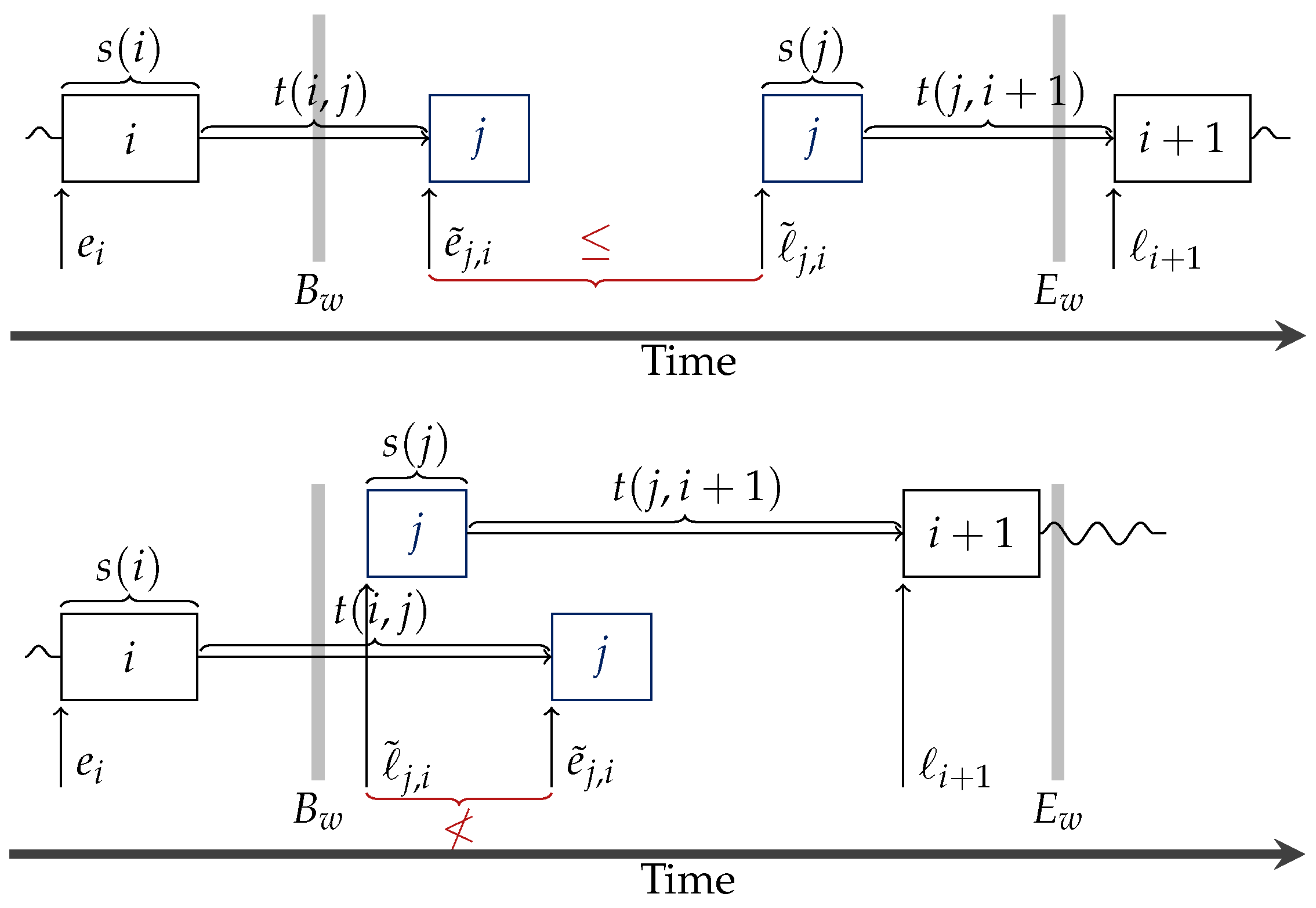
3.3.3. Feasibility of an Insertion
The feasibility of the possible insertion points
can be checked easily with earliest and latest arrival times, e.g., see reference [
37]. Similar to the definitions above and with the help of
and
, we define the earliest and latest arrival time
and
for inserting a new customer
after
within the (pre)assigned time window
as follows:
Thus, customer
j can be inserted between customers
i and
, such that
j and all subsequent customers of
can be served within their assigned time windows if and only if the following condition holds.
We refer to
Figure 2 for an illustration.
Additionally, we must check if the sum of the weights of the customer orders assigned to tour
does not exceed its capacity
. The insertion of
j into tour
is feasible with respect to capacity if the following condition holds:
Assuming that all earliest (latest) arrival times and the sum of order weights on a tour
have already been calculated, TFEAS(
) and CFEAS(
) allow to check the feasibility of a possible insertion into a given time window in
time provided that the sequence of
(except for
j) stays the same. If the feasibility check was successful and we decide to insert
j, we obtain a new tour
. Customer
j is then assigned to index
, and all indices of succeeding customers are incremented. Clearly, the earliest and latest arrival times and the sum of order weights of the modified tour must be updated. This requires
time [
38]. In general, there exist cases where a feasible insertion of
j is only possible when the order of
is changed, which makes the problem NP-hard.
3.4. Slot Optimization Problem
With the introduced notation, we can recall the formal definition of the slot optimization problem (SOP) [
23], which arises in the time window determination step. We are given a feasible schedule
containing all scheduled customers
, a new customer
, and the given set of time slots
. Then, the SOP asks for the largest set of time slots
such that
j can be serviced during each delivery slot
by at least one vehicle of the fleet, while assuring that all other scheduled orders stay within their assigned time slot. Hence, the objective is to maximize
.
In more detail, the SOP aims to find at least one feasible schedule for each of the VRPTW instances consisting of the already scheduled customers
and the new customer
j being temporarily assigned to one of the time windows
. Choosing one delivery slot for the new customer order makes the SOP equivalent to the feasibility version of the VRPTW. As the VRPTW is strongly NP-hard [
39], the SOP is also strongly NP-hard and consists of several feasibility problems that are all strongly NP-complete.
5. Computational Study and Analysis
We want to provide a performance evaluation of the different steps and approaches of the ordering phase. First, in
Section 5.1, we describe the design of our test instances. In
Section 5.2, we analyze how well, in terms of run time and solution quality, the different approaches for the time window determination step perform. Then, we compare the different improvement approaches in
Section 5.3. Finally, in
Section 5.4, we compare the performances of different combinations of approaches for the determination and the improvement step.
5.1. Design of the Instances
The benchmark instances are derived from those originally proposed by reference [
13]. They are designed to reproduce the characteristics of an online grocery shopping service offered by an international grocery retailer.
Each instance corresponds to one delivery region that is served by one depot, which has its assigned fleet of vehicles. All instances are based on a 20 × 20 square grid. A total of 80% of the customer locations have been randomly assigned to 15 clusters. The center (location) of each cluster is sampled from a two-dimensional uniform distribution. The shape of each cluster is defined by the covariance matrix , where and both follow a uniform distribution. Furthermore, the clusters have been rotated by a random angle between 0 and . Customer locations have been sampled from the multivariate normal distribution of the assigned cluster and all coordinates have been rounded to integers. The remaining 20% of the locations are sampled from a two-dimensional uniform distribution. The numbering of the customers is randomly permuted.
We consider two different placements of the depot: (a) at the center of the grid; (b) at the center of the top-left quadrant. In each test set-up, there are equally many instances for both variants. Each vehicle has a loading capacity of 200 units. The order weights of customers have been sampled from a truncated normal distribution with a mean of 7 and standard deviation of 2, where the lower bound is 1 and the upper bound is 15. The service time of each customer is 5. All tours have the same start and end times while vehicle operation times are set such that they do not overly restrict the problem.
We apply a very simple customer choice model to simulate the customer’s choice if they place an order or not after being presented the selection of time windows. Similar to Cleophas and Ehmke [
28], every customer has just one desired delivery time window (defined in the benchmark instance). The customer refuses to place an order if this preferred time window is not offered. Furthermore, we assume that all delivery time windows are equally prominent among customers (randomly selected from
) to obtain unbiased results that allow for an easier identification and clearer interpretation of the key findings.
We define three sets of delivery time windows
: (a)
: 10 non-overlapping time windows with a length of 1 h each, e.g., 08:00–09:00, 09:00–10:00, etc. (b)
: 10 overlapping time windows with a length of 1.5 h each (except for the last time window, which has a 1 h length), where each window overlaps the preceding time window by 30, e.g., 08:00–09:30, 09:00–10:30, etc. (c)
: 12 overlapping time windows, consisting of nine windows with a length of 1 h each, 08:00–09:00, 10:00–11:00, …, 16:00–17:00 and (as used by Köhler et al. [
21]) three time windows of 3 h length, morning: 08:00–11:00, noon: 11:00–14:00, afternoon: 14:00–17:00.
In summary, our assumptions were chosen to find a good compromise between realistic instances and enabling a concise description and interpretation of the experimental set-up. All experiments were performed on an Ubuntu 14.04 machine powered by an Intel Xeon E5-2630V3 @ 2.4 GHz 8 core processor and 132 GB RAM. We implemented all algorithms in Java Version 8 and used Gurobi 8.1.0 as the MILP solver in single-thread mode. Parallelization of the applied methods is not considered. We run each experimental configuration on 100 instances and report average values. Note that the absence of overlapping time windows allows for the use of a more efficient MILP formulation of the TSPTW for
than for
and
(see
Section 4.4).
5.2. Comparing Approaches for the Determination Step
In this subsection, we evaluate the performance of different approaches for the time window determination step, i.e., we compare the simple insertion heuristic, the ANS heuristic, and the TSP(s)TW insertion approach in terms of run time and solution quality.
To allow a proper comparison of the methods for solving the SOP, we constructed instances which consist of (a) a feasible schedule that contains p customers, and (b) a new customer order for which the availability of delivery time slots must be decided. To create SOP instances for benchmarking, we had to create feasible delivery schedules that are already filled with orders. Hence, we created delivery schedules by iteratively trying to insert 2000 customers into each schedule. The simple insertion heuristic was used to conduct the feasibility checks. The number of customers that are contained in the resulting schedule is denoted by . We consider as being a sufficiently good approximation of the maximal number that can be inserted into a schedule considering a given configuration. Hence, we distinguish two scenarios: (i) in the first scenario, we perform no optimization between the insertion steps, and (ii) in the second scenario, the schedule is re-optimized by applying 1move after each customer insertion. This reduces the total travel time of the schedule. We restrict the improvement step to the most simple approach to avoid unwanted bias when evaluating the performance of the different approaches for the determination step. In general, the schedules in the second scenario contain more orders while utilizing the same number of vehicles.
Since the practical hardness of the SOP increases as the schedules are filled up with customers, we consider SOP instances with different fill levels. The fill level f of a schedule is defined as the ratio between the number of customers p in the schedule and the maximal number of customers that can be inserted into the schedule. For benchmarking at a given fill level f, we select the schedule that was generated by above described process, which contained orders. For each generated instance, we solve the SOP using the simple insertion heuristic, the TSP(s)TW insertion n approach, and the proposed ANS heuristic. In order to investigate the differences between the considered methods, we analyze their performance on all three sets of time windows (, , ), instance sizes, and fill levels. Hence, we run tests on benchmark instances with 60 tours (vehicles) and consider fill levels of 85%, 90%, 95%, and 99%.
We report the number of feasible time slots found by each method and required run times (mm:ss.zzz) for all scenarios, i.e., optimized and non-optimized schedules. We report the results for
in
Table 1, for
in
Table 2, and for
in
Table 3. Moreover, we report the number of feasible time slots that are found by combining the findings of all three methods, denoted as “combined” in the tables. Additionally, we report
, the number of customers at a 100% fill level. All reported numbers are average values over 100 instances each.
As a reference to compare against, we select the simple insertion heuristic. Both other methods, TSP(s)TW insertion and ANS, are entitled to find at least the delivery time slots that are determined by the simple insertion heuristic. This property is guaranteed due to the construction of those methods. Unfortunately, we can not provide an upper bound for the number of feasible delivery time slots as, to the best of our knowledge, there is no more powerful search method applicable for the SOP in the current literature. In our experiments, we restrict the ANS to 1move operations, as preliminary experiments showed that allowing 1swap operations yields unacceptably long run times (up to some minutes). Additionally, the results are only insignificantly better. Primarily, we notice that the simple insertion heuristic returns solutions for the SOP in less than one millisecond for all considered instances. At fill level (85%) the instances are still rather easy and, hence, the simple insertion heuristic determines nearly all time slots as being feasible. While the simple insertion heuristic still performs well at 90% and 95% on optimized schedules, it performs poorly on non-optimized schedules with the same fill levels due to the lower quality of the schedules.
Furthermore, we observe that the TSP(s)TW insertion approach yields a slight improvement over the simple insertion heuristic in terms of available time windows at 85–95%. However, a significant improvement can be observed when it is applied to non-optimized schedules at a 99% fill level. TSP(s)TW insertion shows acceptable run times for . In contrast, run times for and are between 3 s and nearly 4 and are thus unacceptable. Hence, considering these findings, the TSP(s)TW insertion turns out to be impractical for AHD systems. Moreover, we notice that the ANS yields significantly more feasible time slots than the simple insertion heuristic (and TSP(s)TW insertion) on non-optimized schedules at 95% and 99%. Similar behavior can be observed on optimized schedules at 99%. The run times of the ANS stay below 1 s for nearly all experiments with up to a 95% fill level. The ANS clearly performs best in terms of solution quality on instances having a 99% fill level, resulting in up to 11 times more available delivery time windows than with simple insertion. However, on those instances its run time reaches up to 9 s. It is worth pointing out that the performance of the ANS is nearly constant over all three sets of time windows, showing that it can also deal with instances having overlapping delivery time windows.
In general, we notice a slight performance drop of the ANS (compared to the TSP(s)TW insertion approach) when being applied non-optimized schedules compared to optimized schedules. This can be explained by the fact that identifying feasible time windows is less hard for non-optimized schedules as they contain less orders on average. Additionally, there is more potential for improvement when applying TSP(s)TW insertion as the single tours have not been improved in any way after inserting the customers. Additionally, we observe that “combined” shows only a marginal improvement over the ANS for optimized schedules. On the other hand, we notice a strong improvement of “combined” compared to the TSP(s)TW insertion approach and ANS for non-optimized schedules at a 99% fill level. This can be explained by the fact that the TSP(s)TW insertion approach has a larger potential of finding a feasible insertions (compared to the simple insertion heuristic) if the tours are of low quality (as there is more room to rearrange the tours) due to the already observed weaker performance of the ANS in this case.
Our experiments show that the ANS heuristic is capable of finding a larger number of feasible delivery slots than the simple insertion heuristic, requiring run times that are still well suited for AHD services when dealing with moderately sized problem instances. However, to efficiently tackle very large instances, the parallelization of the ANS is advised. In summary, the ANS heuristic is clearly the best method for solving the SOP when being concerned with the solution quality while the simple insertion heuristic is the method of choice in cases of tight run time restrictions.
5.3. Comparing Approaches for the Improvement Step
To compare the proposed improvement approaches, we perform experiments where we iteratively insert new customers into the schedule, simulating customers placing orders online. Due to the iterative benchmark set-up, we can insert the new order without double-checking the availability of the selected delivery time slot. Again, to avoid bias, we stick to the most simple approach for the determination step, the simple insertion heuristic. Then, for the improvement step we compute the following metrics:
Average improvement over insertion step: the average reduction of the objective function when applying the optimization approaches to the schedule after inserting the new customer (given in percentage);
Average improvement of the cost of insertion: the average reduction of the objective function relative to the increase of the objective function caused by inserting the new customer (given in percentage);
Average number of TSPsTW MILPs solved;
Average run time of each improvement strategy.
Additionally, we report the average total number of customer orders that have been inserted into the final schedules. Note that for the MILPs we set a time limit of 60 s.
5.3.1. Average-Sized Grocery Home Delivery Problems
First, we want to analyze the improvement approaches for instance sizes which we found to appear most commonly in practice. Hence, we consider 500 customers that are served by
vehicles with a capacity of 200 units each. The number of used vehicles corresponds to the practical difficulty of the instances. The numbers are chosen such that the instances are reasonably difficult. In that sense, using 20 vehicles results in accepting nearly all 500 customers on average. These instances are designed to reflect the majority of delivery regions as they were encountered during our project with a leading supermarket chain. The results for these experiments are reported in
Table 4.
We observe that all approaches considered are applicable in an online service as the average run time per step is below 4 s, which is very reasonable for instances of this size. Furthermore, a reduction of our objective function by 0.29% to 0.60% per step is remarkable as between two improvement steps the schedule is altered only by the insertion of one customer. This can be further underlined by the reported average reduction of the cost of inserting the new customer ranging from 35.82% to 63.48%. These numbers show that our approaches meet the requirements of modern AHD systems. The experiments reveal that 1move + 1swap clearly outperforms 1move in terms of improving the objective function (across all three types of time windows). Additionally, solving the TPS(s)TW afterwards results in a further improvement of the objective. Considering different delivery time windows, we notice that the approaches perform best with respect to run time on instances with
and worst on instances with
. While there is a slight difference for the local search operations, the difference is nearly 3 s when additionally applying the TSP(s)TW MILP. This is due to the fact that the absence of overlapping time windows allows for a more efficient MILP formulation (
Section 4.4). Thus, during peak times and in case of overlapping time windows, we advise to stick to 1move (or 1move + 1swap). Furthermore, the average number of customers that can be inserted into the schedule deviates at most by 9 (+1.9%) between
and
. Hence, allowing overlapping time windows accounts for a small benefit concerning the degree of capacity utilization. Similarly, in case of overlapping time windows (
and
) the travel time reduction is slightly larger than for
.
5.3.2. Dealing with Large-Problem Instances
Large supermarket chains offer their services across the whole country. Caused by the different geographies, the sizes of the delivery regions that are covered by a depot strongly vary ranging from a few hundred up to around 2000 customers per day. Dealing with such large delivery regions is especially challenging during periods where many customer requests arrive within a short time frame. To accommodate these periods of high request frequency, we propose to run the improvement step only after each ith successful insertion step, instead of after each.
We want to validate this idea by running computational experiments. We consider instances with 2000 customers (the largest number we encountered in practice) and 80 vehicles for these experiments and report the results in
Table 5. Each column shows results for different values of
i. For these experiments we can only report the average improvement of the schedule when applying the respective improvement strategy. First, we notice that the run time of the improvement step increases with
i: the more often we skip an improvement step, the longer it takes to improve the schedule’s total travel time. Moreover, we observe an increased improvement per step with increasing
i. Apparently, the improvement that was omitted can be made up (up to a certain extent), by applying the improvement step at a later point in time. It shows that performing the improvement step only after every
ith successful insertion is a viable option.
While 1move stays below 6 s for , its run time increases up to 13 s for . The run times of 1move + 1swap are between 1 and 2 (overlapping time windows), which is still acceptable. We observe that solving the TSP(s)TW MILP does increase the run times (on top of the local search heuristics) insignificantly while still showing some additional improvements of the objective. In general, the observations from the previous experiments with 500 customers carry over to this experiment. Again, we notice shorter run times for than for and . However, we observe less significant differences than for the experiments with 500 customers.
In summary, the results show that skipping the improvement step allows us to deal with temporarily high customer request rates, even for very large schedules with a vast number of customers. Furthermore, we see that applying the improvement step less often leads to an increased improvement per step at the cost of longer run times. Finally, note that triggering the improvement step dynamically when there are no new requests is also a valid option.
5.4. Interplay of Approaches for the Determination and the Improvement Step
In this final experiment, we want to find out which combinations of the different approaches for the determination and the improvement step are most beneficial and which should be avoided. From
Section 5.2, we learn that simple insertion is the fastest method for the determination step, showing a solid performance, while the ANS is the best method in terms of solution quality. However the ANS has the drawback that it can only be applied when the customer request rate is moderate (or on small instances).
In
Section 5.3, we observe that 1move is a solid approach for the improvement step that scales well for larger problem instances. The application of more sophisticated local search operations in combination with an exact approach for a selected sub-problem (1move + 1swap + TSP(s)TW) shows the best performance in terms of solution quality at the price of high (but still acceptable) run times.
Further evaluations are based on the average-sized grocery delivery-use case (
Section 5.3) and will focus on aforementioned time window determination and improvement approaches. Hence, we compare the resulting four combinations
×
concerning the following key figures:
Average run time of the determination and improvement step;
Average number of offered delivery time windows;
Average total number of customer orders that have been inserted into the final schedules.
In
Table 6, we report the results of this experiment. First, we notice that now when analyzing the interplay of the determination and the improvement step the differences between ANS and the simple insertion heuristic become less evident. ANS shows little benefit compared to the simple insertion heuristic in terms of the number accepted orders
(at most a 0.4% improvement) and the number of offered time windows. The use of ANS reduces the run time of the improvement step. This effect is most evident when overlapping time windows are used (
and
), especially for the 1move + 1swap + TSP(s)TW approach where a reduction of the run time of up to 71.4% is observed. Presumably, ANS creates better schedules when inserting the new customer, and therefore the improvement approaches have a better starting solution.
In summary, we can conclude that using the ANS for the time window determination (and the insertion) step is preferred as long as the instances are sufficiently small (as in our use case) such that it can still be performed in accordance with the run-time requirements of the considered AHD service. However, the ANS gives a slight improvement compared to the simple insertion heuristic (as already shown in
Section 5.3) and should therefore be utilized if the frequency of incoming orders is sufficiently low, such that the additionally required run times do not cause issues. If the expected time between incoming order requests temporarily increases, e.g., during peak times, one can switch to the 1move heuristic without having to fear major drawbacks.
6. Conclusions
In this work, we considered an attended home delivery (AHD) system in the context of an online grocery shopping service offered by an international retailer. AHD systems are used whenever the customers must be present when their deliveries arrive. For an efficient delivery process, the supermarket and the customer must both agree on a time window during which the delivery can be guaranteed.
We focused on the phase during which customers place their orders through a web service. Generally, this is the most challenging phase of an AHD system from a computational point of view. As for most AHD approaches in the literature, we considered a vehicle routing problem with time windows to be the underlying optimization problem. The online characteristic of this phase requires that the delivery schedule is built dynamically as new orders are placed. We split the computations into four steps and proposed solution approaches that allow to determine which delivery time windows can be offered to potential customers and to iteratively build the schedule.
Finally, we presented a comprehensive experimental evaluation of the proposed heuristic approaches, which are based on local search operations and mixed-integer linear programming formulations. Our goal was to determine the efficiency of the approaches on benchmark sets motivated by an international supermarket chain’s online grocery shopping service. We elaborated certain aspects of the problem by varying the structure of the time windows, the number of available vehicles, and the number of total customer requests. In particular, we compared different approaches for inserting new customers into the existing delivery schedule and for re-optimizing the schedule once a new customer has been added to the schedule. The computational study shows that the suggested algorithms can solve the considered benchmark instances sufficiently fast to comply with the run time restrictions of an grocery home delivery service having high customer request rates. It can be a guideline for practitioners when designing a grocery delivery system.
For future research, a variety of extensions of the framework are possible and could be integrated without major changes to its general architecture. Primarily, incorporating dynamic slotting methods into the decision process as well as the use of vehicles having different temperature compartments (where applicable) could largely improve the practical performance of any AHD system. A combination of the home delivery approach and dedicated pick-up locations would be another interesting research direction.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}