
Swarm Robots Cooperative and Persistent Distribution Modeling and Optimization Based on the Smart Community Logistics Service Framework


Abstract
:1. Introduction
- (1)
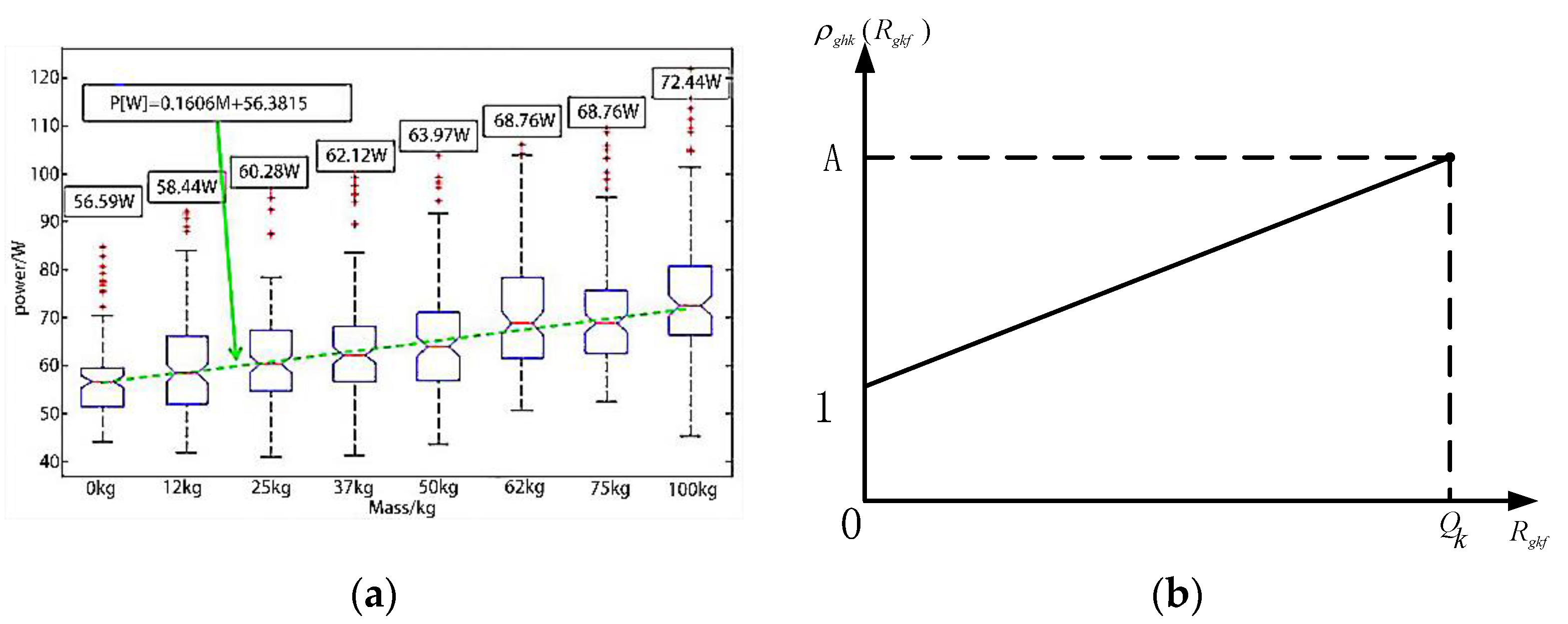
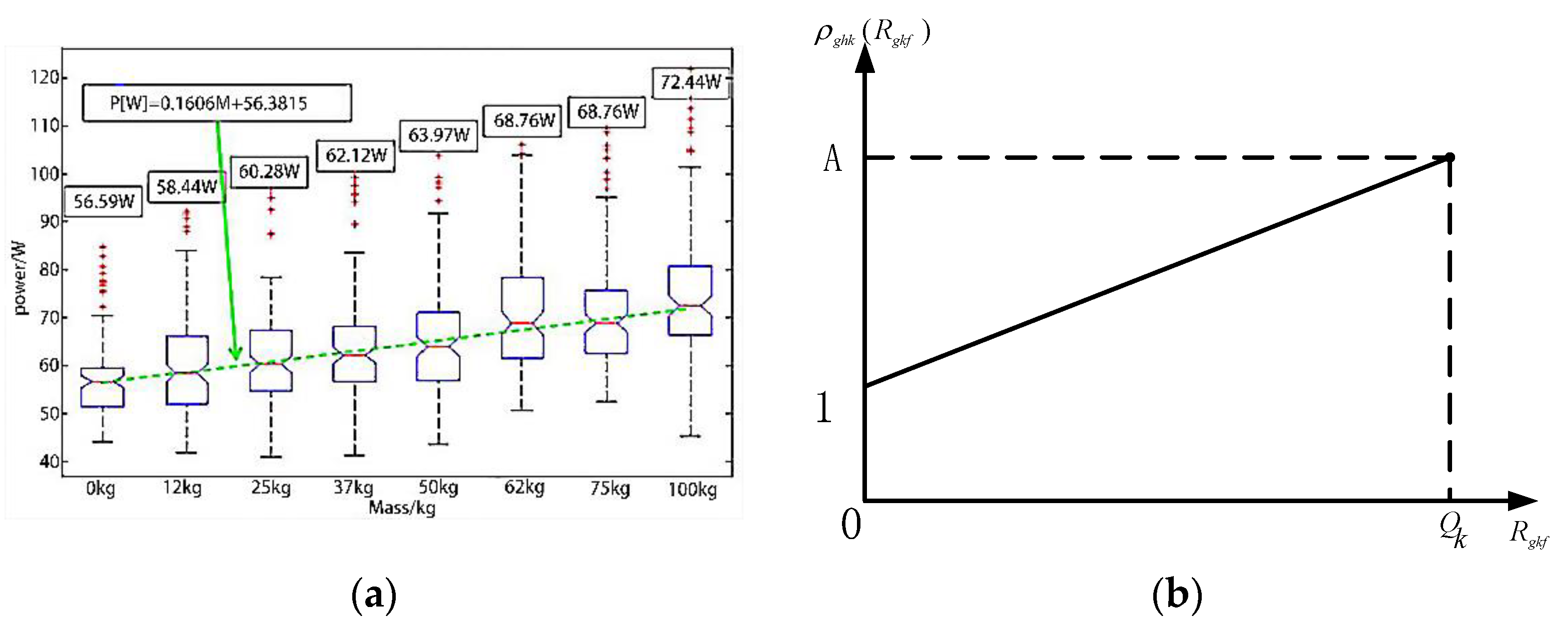
- The power and load-bearing capacity of the robot itself, not like heavy-duty tool trucks, and their speed and travel time will be affected by the weight of the load.
- (2)
- Each robot needs to be charged at intervals and cannot work continuously for a long time.
- (3)
- The charging of the robot takes a certain amount of time, and the charging time is related to the power loss. The longer the travel time, the more the power loss, the longer the charging time.
- (4)
- Each robot should be placed in a service station instead of stopping outside when it completes a task or is not performing the task in order to avoid the loss of the robot.
2. Related Works
3. Materials and Methods
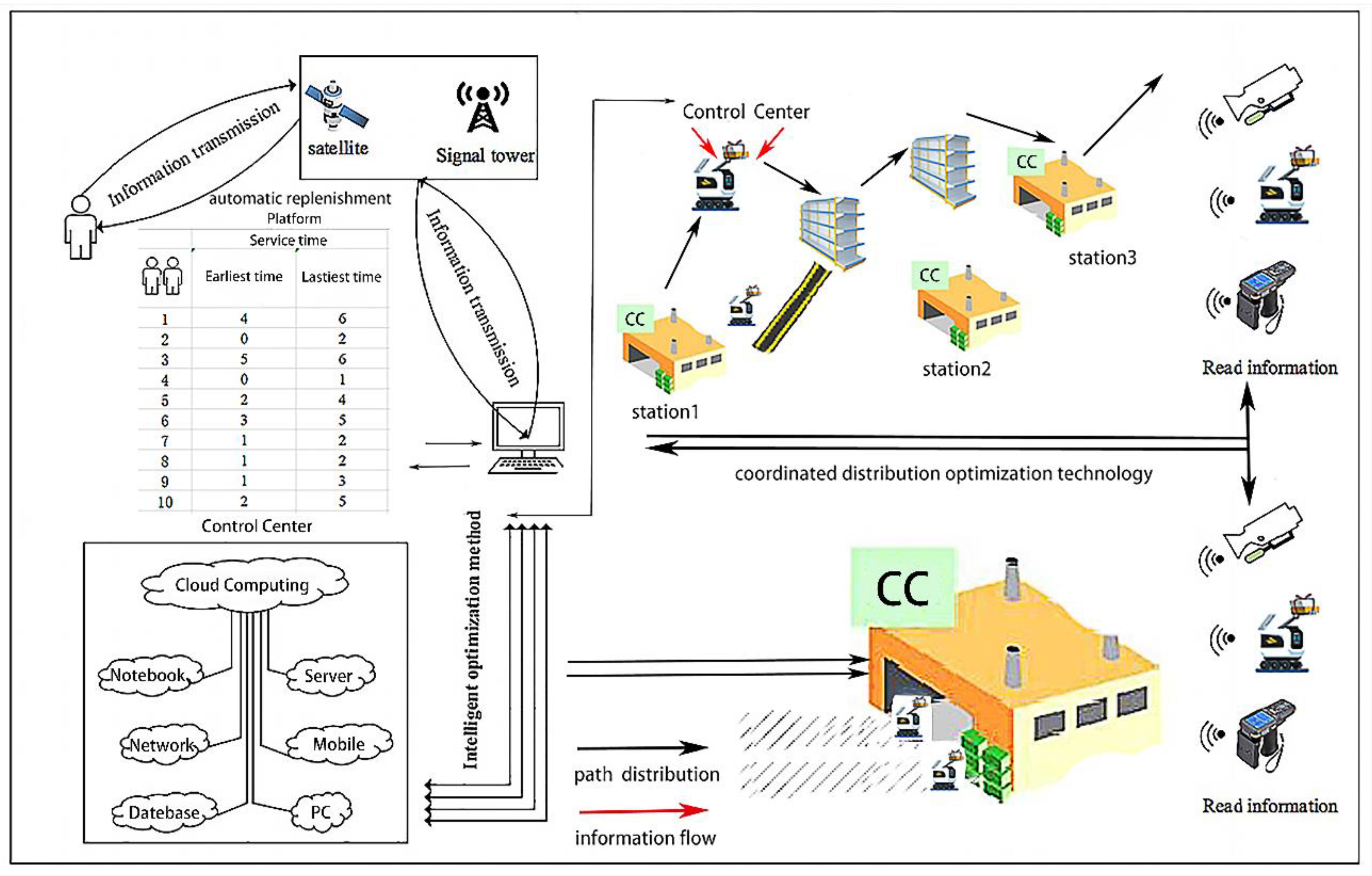
3.1. Problem Description
3.2. Mathematical Formulation
3.2.1. Model Parameters
3.2.2. Load Weight Influence Function
3.2.3. Service Station Charging Function
3.2.4. The Model
3.3. Solving Algorithm
3.3.1. S-PSO Algorithm
3.3.2. GA Improved S-PSO Algorithm
4. Experimental Evaluation
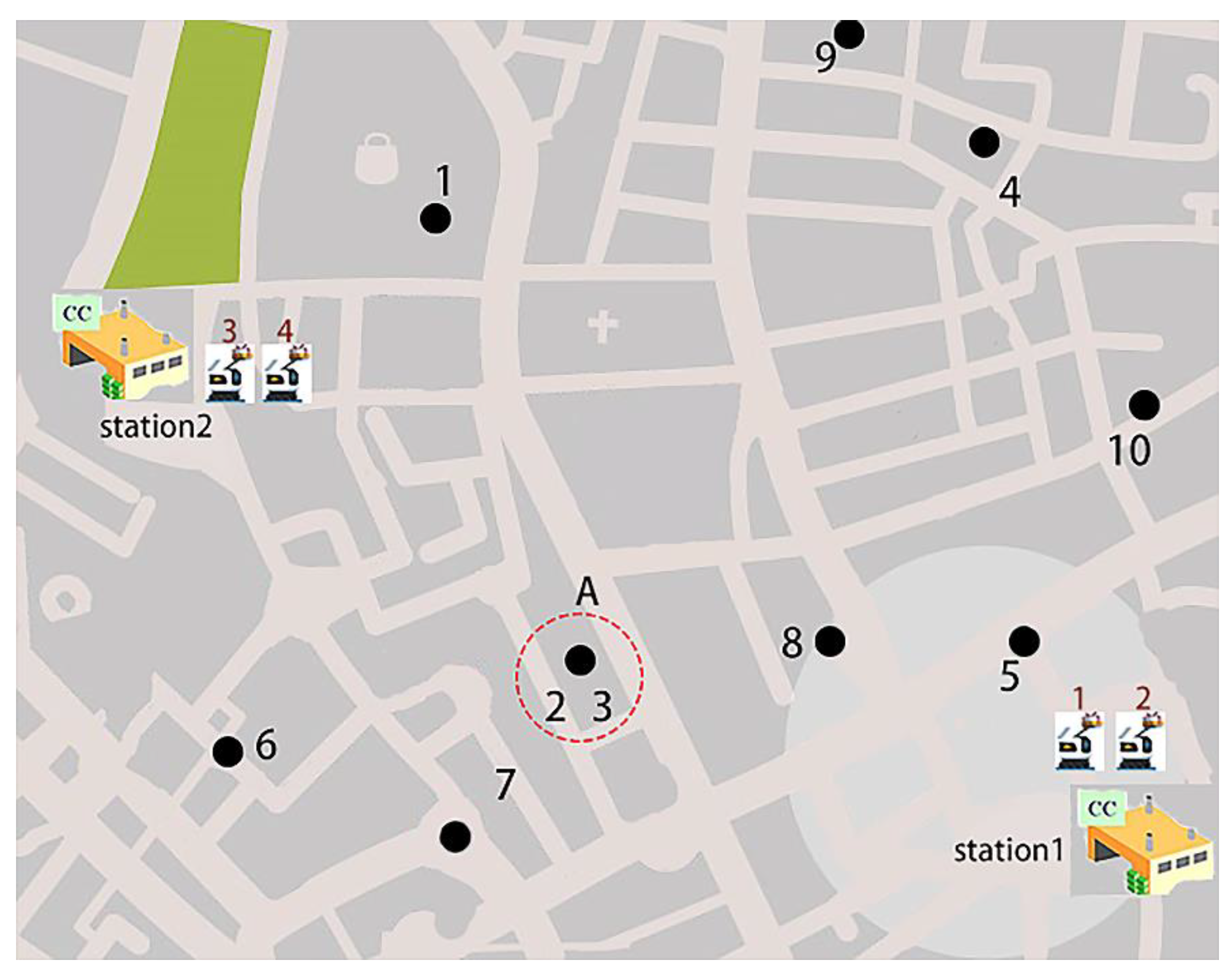
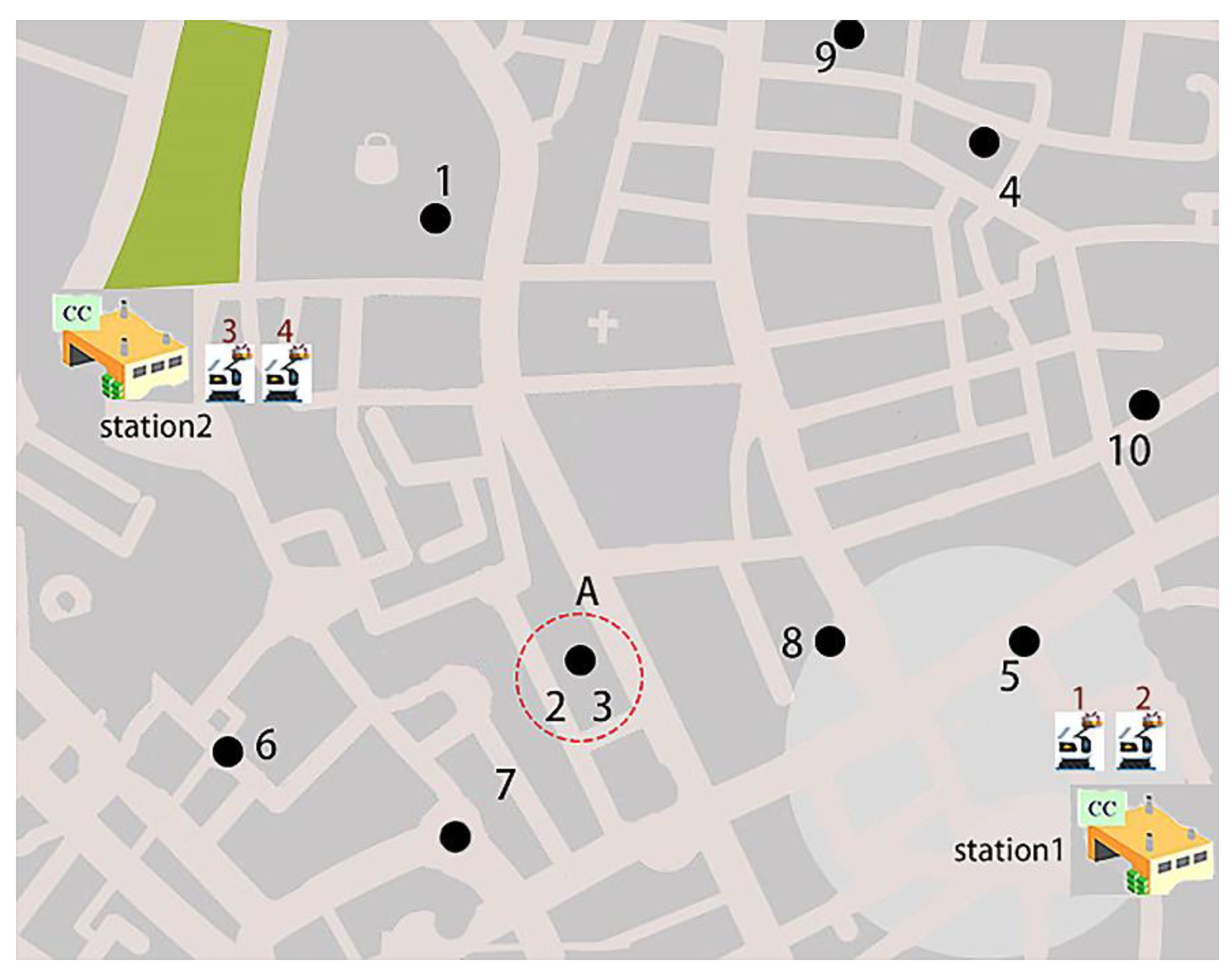
4.1. Example Background
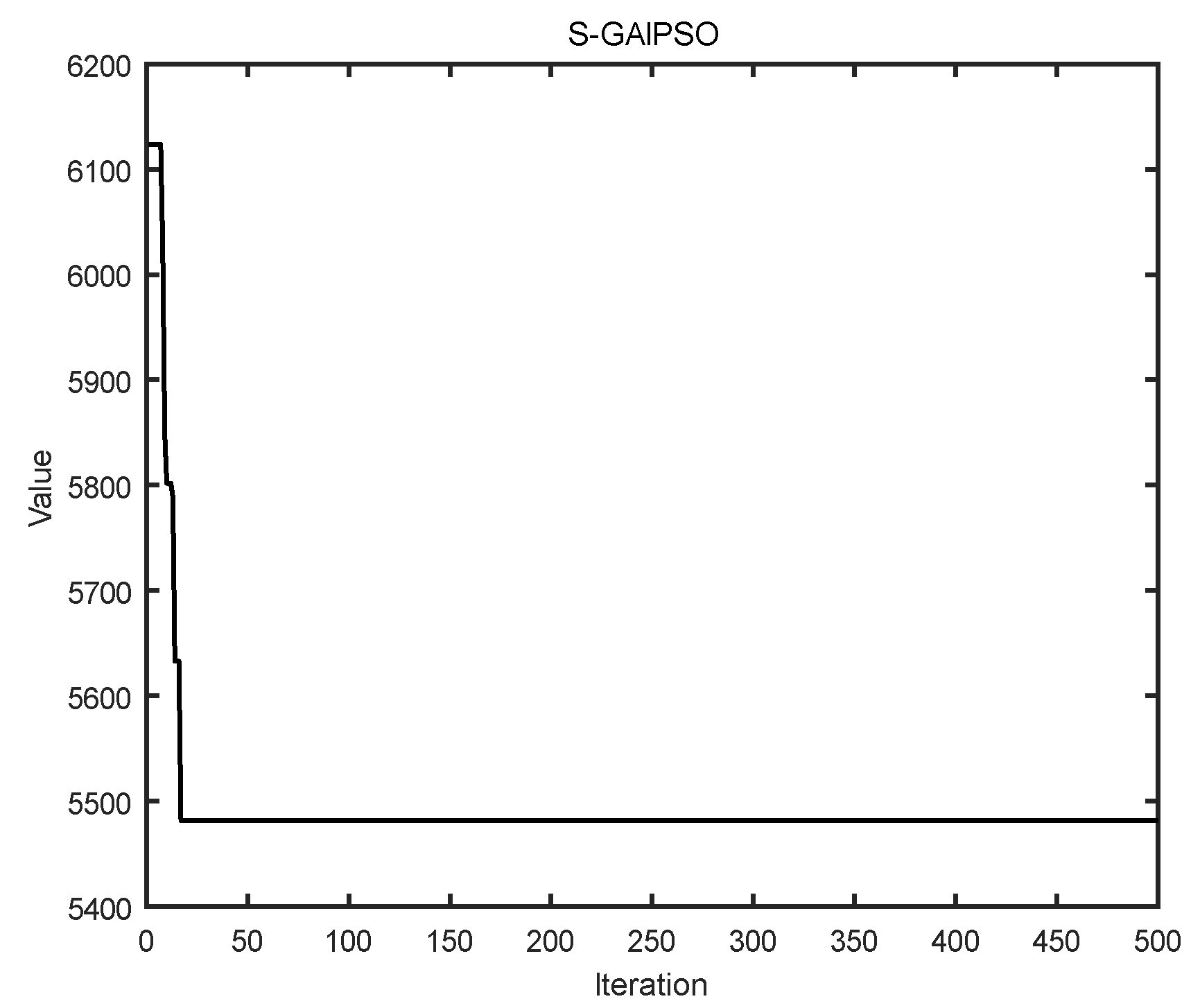
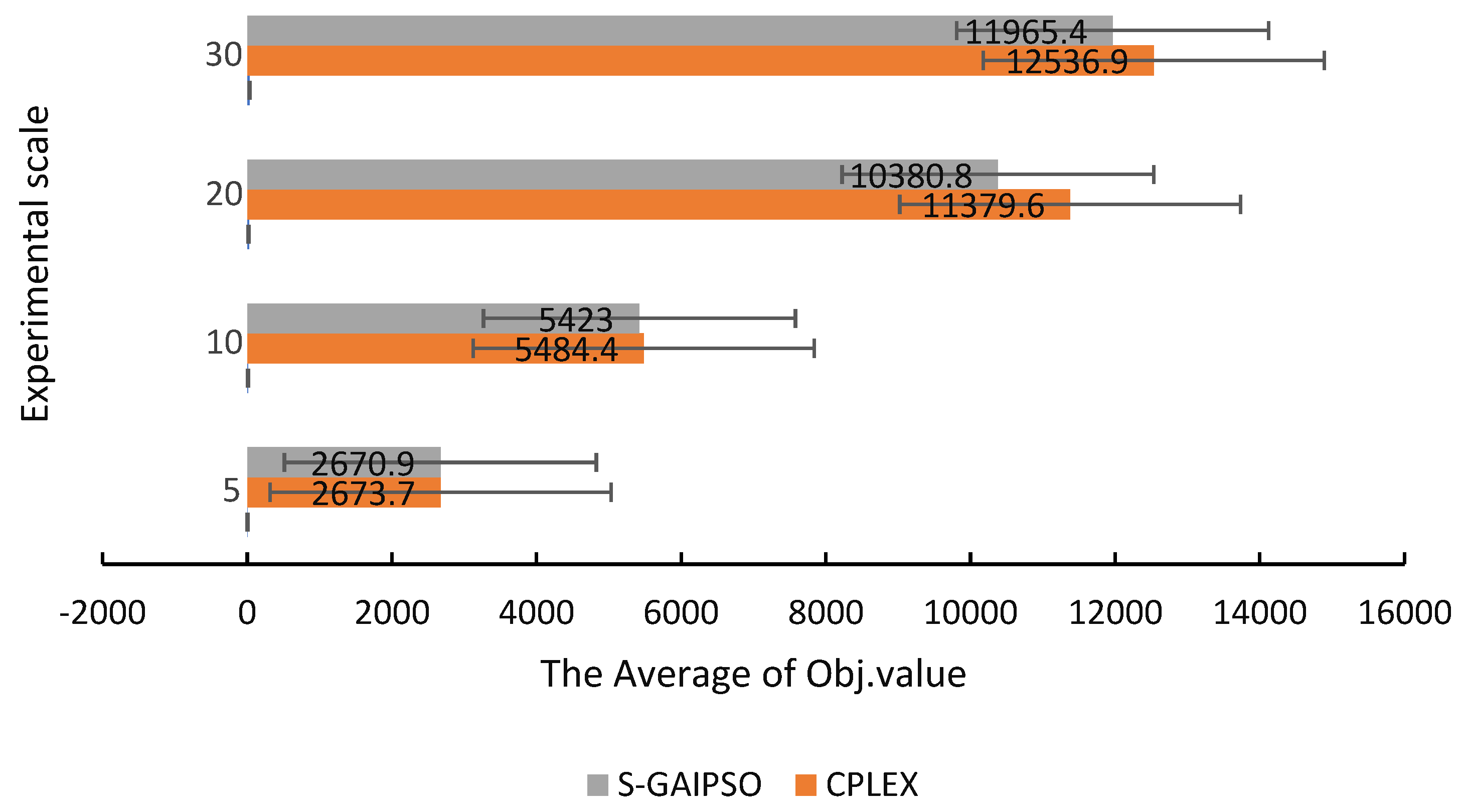
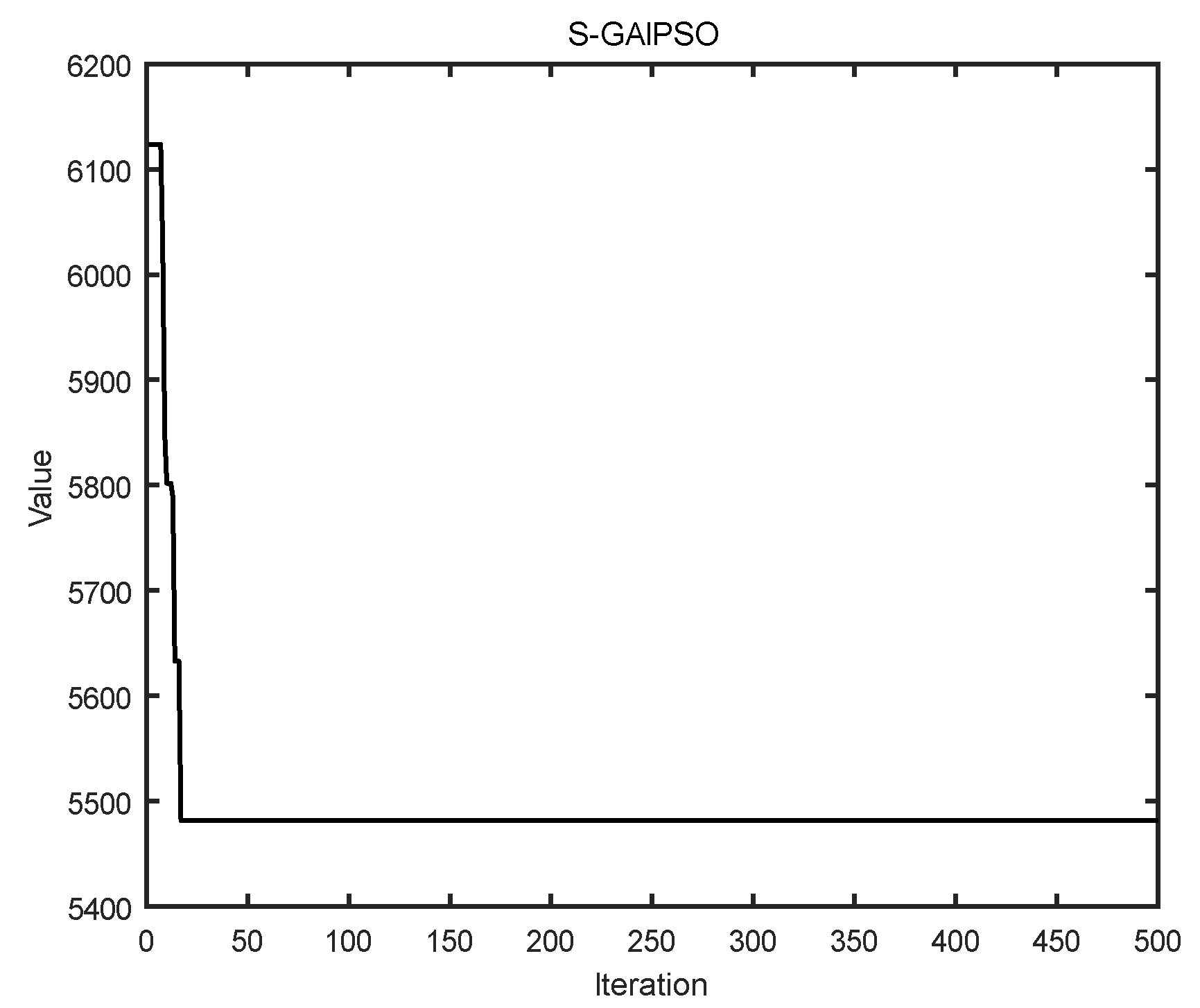
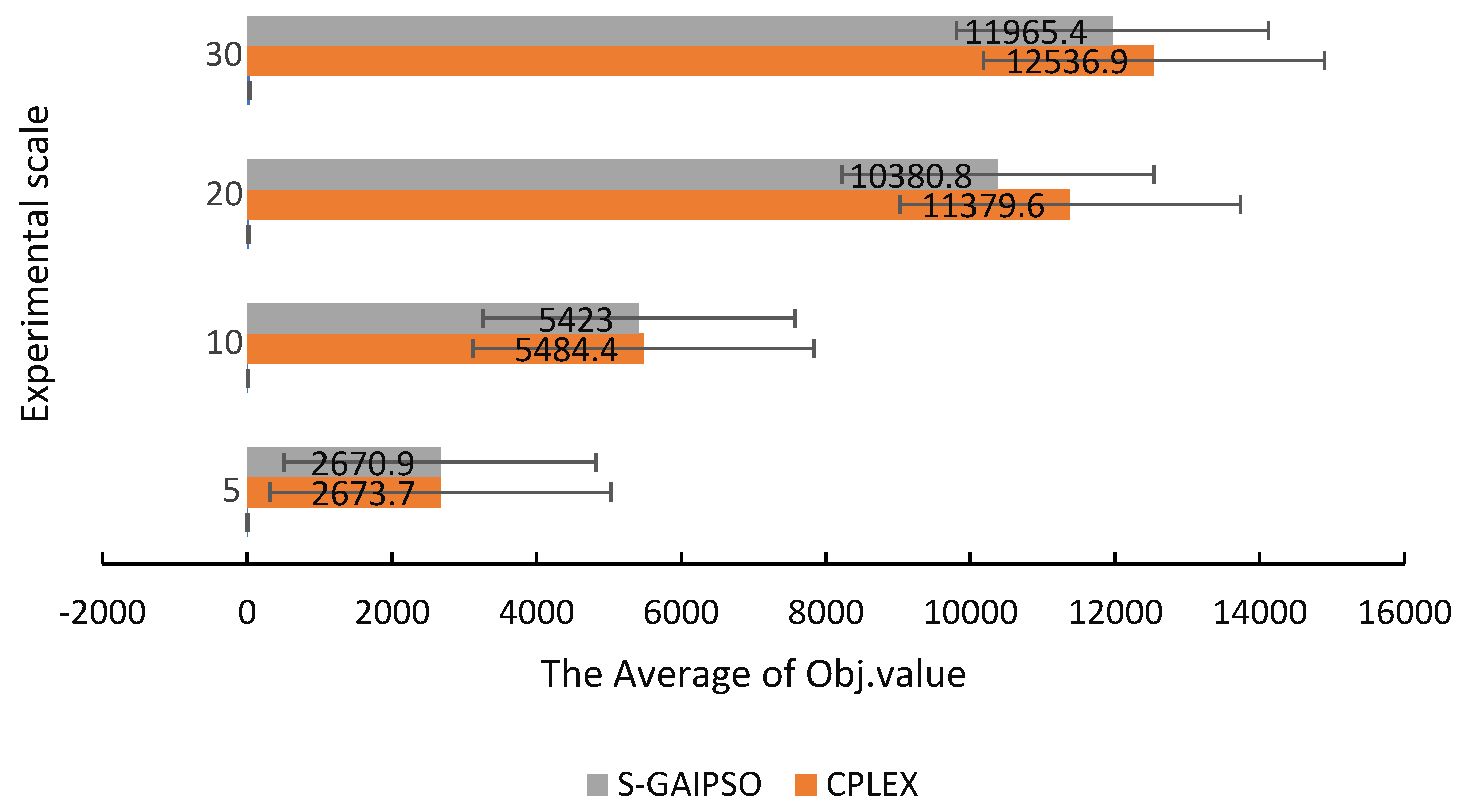
4.2. Performance Evaluation of CPLEX and S-GAIPSO
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bačík, J.; Tkáč, P.; Hric, L. Phollower-The Universal Autonomous Mobile Robot for Industry and Civil Environments with COVID-19 Germicide Addon Meeting Safety Requirements. Appl. Sci. 2020, 10, 7682. [Google Scholar] [CrossRef]
- Keenon Robot. 2021. Available online: https://www.keenonrobot.com/GoogleScholar (accessed on 20 March 2021).
- Swayamsiddha, S.; Mohanty, C. Application of cognitive Internet of Medical Things for COVID-19 pandemic. Diabetes Metab. Syndr. Clin. Res. Rev. 2020, 14, 911–915. [Google Scholar] [CrossRef] [PubMed]
- Guptaeepti, D.; Bhatt, S.; Gupta, M. Future Smart Connected Communities to Fight COVID-19 Outbreak. Internet Things 2021, 13, 100342. [Google Scholar] [CrossRef]
- Perdoch, M.; Bradley, D.; Jonathan, K.C. Leader Tracking for a Walking Logistics Robot. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2994–3001. [Google Scholar] [CrossRef]
- Didier, B. Impacts of Robotization on the Logistics. Available online: https://www.rolandberger.com/zh/Publications/pubofrobotsandmen.html (accessed on 15 December 2021).
- Zhang, R.; Pavone, M. Control of robotic mobility-on-demand systems: A queueing-theoretical perspective. Int. J. Robot. Res. 2014, 35, 186–203. [Google Scholar] [CrossRef]
- Wen, L.; Zhu, F. Swarm Robotics Control and Communications: Imminent Challenges for Next Generation Smart Logistics. IEEE Commun. Mag. 2018, 56, 102–107. [Google Scholar] [CrossRef]
- Xue, F.; Tang, H.; Su, Q. Task Allocation of Intelligent Warehouse Picking System based on Multi-robot Coalition. KSII Trans. Internet Inf. Syst. 2019, 13, 3566–3582. [Google Scholar] [CrossRef] [Green Version]
- Song, B.D.; Kim, J.; Morrison, J.R. Rolling Horizon Path Planning of an Autonomous System of UAVs for Persistent Cooperative Service: MILP Formulation and Efficient Heuristics. J. Intell. Robot Syst. 2016, 84, 241–258. [Google Scholar] [CrossRef]
- Li, J.; Yang, F. Task assignment strategy for multi-robot based on improved Grey Wolf Optimizer. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 6319–6335. Available online: https://link.springer.com/article/10.1007/s12652-020-02224-3 (accessed on 20 October 2021). [CrossRef]
- Pramanik, P.; Maiti, M.K. An inventory model for deteriorating items with inflation induced variable demand under two level partial trade credit: A hybrid ABC-GA approach. Eng. Appl. Artif. Intell. 2019, 85, 194–207. [Google Scholar] [CrossRef]
- Kuo, R.J.; Lu, S.H.; Lai, P.Y.; Mara, S.T.W. Vehicle Routing Problem with Drones Considering Time Windows. Expert Syst. Appl. 2021, 191, 116264. [Google Scholar] [CrossRef]
- Christofifides, J.; Mingozzi, N.A. State-space relaxation procedures for the computation of bounds to routing problems. Networks 1981, 11, 145–164. [Google Scholar] [CrossRef]
- İLhan, İ. An improved simulated annealing algorithm with crossover operator for capacitated vehicle routing problem. Swarm Evol. Comput. 2021, 64, 100911. [Google Scholar] [CrossRef]
- Karakatič, S. Optimizing nonlinear charging times of electric vehicle routing with genetic algorithm. Expert Syst. Appl. 2021, 164, 114039. [Google Scholar] [CrossRef]
- Bae, H.; Moon, I. Multi-depot vehicle routing problem with time windows considering delivery and installation vehicles. Appl. Math. Model. 2016, 40, 6536–6549. [Google Scholar] [CrossRef]
- Sahin, E. Swarm robotics: From sources of inspiration to domains of application, in Swarm Robotics. Lect. Notes Comput. Sci. 2005, 334, 10–20. [Google Scholar] [CrossRef]
- Fukuda, T.; Kawauchi, Y. Cellular robotic system (cebot) as one of the realizations of self-organizing intelligent universal manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; pp. 662–667. [Google Scholar] [CrossRef]
- Nedjah, N.; Silva, L.J. Review of methodologies and tasks in swarm robotics towards standardization. Swarm Evol. Comput. 2019, 50, 100565. [Google Scholar] [CrossRef]
- Senanayake, M.; Ilankaikone, S.; Carlo, B.J. Search and tracking algorithms for swarms of robots: A survey. Robot. Auton. Syst. 2016, 75, 422–434. [Google Scholar] [CrossRef]
- Wang, J.; Lim, M.K.; Zhan, Y.; Wang, X. An intelligent logistics service system for enhancing dispatching operations in an IoT environment. Transp. Res. Part E Logist. Transp. Rev. 2020, 135, 101886. [Google Scholar] [CrossRef]
- Leofante, F.; Abraham, E.; Niemueller, T. Integrated Synthesis and Execution of Optimal Plans for Multi-Robot Systems in Logistics. Inf. Syst. Front. 2019, 21, 87–107. Available online: https://link.springer.com/article/10.1007/s10796-018-9858-3 (accessed on 23 October 2021). [CrossRef] [Green Version]
- Milford, M.; Wyeth, G. Hybrid robot control and SLAM for persistent navigation and mapping. Robot. Auton. Syst. 2010, 58, 1096–1104. [Google Scholar] [CrossRef]
- Eijyne, T.; Rishwaraj, G.; Ponnambalam, G.S. Development of a task-oriented, auction-based task allocation framework for a heterogeneous multirobot system. Sadhana-Acad. Proc. Eng. Sci. 2020, 45. [Google Scholar] [CrossRef]
- Boysen, N.; Schwerdfeger, S.; Weidinger, F. Scheduling last-mile deliveries with truck-based autonomous robots. Eur. J. Oper. Res. 2018, 271, 1085–1099. [Google Scholar] [CrossRef]
- Puyuan, D.; Amirjamshidi, G.; Roorda, M. A vehicle routing problem with movement synchronization of drones, sidewalk robots, or foot-walkers. Transp. Res. Procedia 2020, 46, 29–36. [Google Scholar] [CrossRef]
- Lenstra, J.K.; Kan, A.H.G.R. Complexity of vehicle routing and scheduling problems. Networks 1981, 11, 221–227. [Google Scholar] [CrossRef] [Green Version]
- Vaziri, S.; Etebari, F.; Vahdani, B. Development and optimization of a horizontal carrier collaboration vehicle routing model with multi-commodity request allocation. J. Clean. Prod. 2019, 224, 492–505. [Google Scholar] [CrossRef]
- Bimgshan, M.A.; Dawei, H.; Xiqiong, C. An Optimization of Pure Electric Vehicle Routing Problem on Half-open Multi-distribution Center. J. Transp. Syst. Eng. Inf. Technol. 2019, 19, 199–205. [Google Scholar] [CrossRef]
- Liang, J.; Qin, K.; Suganthan, P.N. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evol. Comput. 2016, 10, 281–295. [Google Scholar] [CrossRef]
- Calvet, L.; Ferrer, A.; Gomes, M. Combining statistical learning with metaheuristics for the Multi-Depot Vehicle Routing Problem with market segmentation. Comput. Ind. Eng. 2016, 94, 93–104. [Google Scholar] [CrossRef] [Green Version]
- Ting, C.J.; Wu, K.C.; Chou, H. Particle swarm optimization algorithm for the berth allocation problem. Expert Syst. Appl. 2014, 41, 1543–1550. [Google Scholar] [CrossRef]
- Zhen, T.; Ge, H.; Che, Y.; Jiang, Y. Research on particle swarm optimization for grain logistics vehicle routing problem. In Proceedings of the 2009 IITA International Conference on Services Science, Management and Engineering, Zhangjiajie, China, 11–12 July 2009; pp. 274–277. [Google Scholar] [CrossRef]
- Amini, S.; Javanshir, H.; Tavakkoli-Moghaddam, R. A PSO approach for solving VRPTW with real case study. Int. J. Res. Rev. Appl. Sci. 2010, 4, 118–126. [Google Scholar]
- Yan, Y.; Zhang, R.; Wang, J.; Li, J. Modified PSO algorithms with “Request and Reset” for leak source localization using multiple robots. Neurocomputing 2018, 292, 82–90. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Asma, A.; Sadok, B. PSO-based Dynamic Distributed Algorithm for Automatic Task Clustering in a Robotic Swarm. Procedia Comput. Sci. 2019, 159, 1103–1112. [Google Scholar] [CrossRef]
- Kwa, H.; Kit, J.L.; Bouffanais, R. Optimal swarm strategy for dynamic target search and tracking. In Proceedings of the 19th International Conference on Autonomous Agents and Multi Agent Systems, Singapore, 9–13 May 2020; pp. 672–680. [Google Scholar]
- Kwa, H.L.; Kit, J.L.; Bouffanais, R. Tracking Multiple Fast Targets with Swarms: Interplay Between Social Interaction and Agent Memory. In Proceedings of the 2021 Conference on Artificial Life, Virtual, Czech Republic, 19–23 July 2021. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, J.; Chung, H.S.H.; Zhong, W.; Wu, W.; Shi, Y. A Novel Set-Based Particle Swarm Optimization Method for Discrete Optimization Problems. IEEE Trans. Evol. Comput. 2010, 14, 278–300. [Google Scholar] [CrossRef]
- Liangru, W.U.; Yang, K.; Zheng, Z.; Ding, H. Map Creation Method for Mobile Robot and Path Planning Method Based on The Map. U.S. Patent 16/712,977, 2020. [Google Scholar]
- Montes, H.; Mena, L.; Armada, M. Energy-efficiency hexapod walking robot for humanitarian demining. Ind. Robot.-Int. J. 2017, 44, 457–466. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Yang, J.; Cui, X.; Li, J.; Li, S.; Liu, J.; Chen, H. Particle filter algorithm optimized by genetic algorithm combined with particle swarm optimization. Procedia Comput. Sci. 2021, 187, 206–211. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task | Delivery Point | Earliest Service Time (Eg) | Latest Service Time (Lg) | Service Time (Pg) | |
|---|---|---|---|---|---|
| X | Y | ||||
| 1 | 31 | 82 | 0 | 2 | 0.4 |
| 2 | 57 | 28 | 5 | 6 | 2 |
| 3 | 57 | 28 | 5 | 6 | 2 |
| 4 | 90 | 94 | 1 | 3 | 0.5 |
| 5 | 87 | 34 | 7 | 8 | 0.3 |
| 6 | 24 | 16 | 2 | 6 | 0.2 |
| 7 | 48 | 8 | 2 | 3 | 0.4 |
| 8 | 71 | 32 | 7 | 9 | 0.6 |
| 9 | 73 | 10 | 1 | 3 | 0.2 |
| 10 | 104 | 56 | 6 | 7 | 0.1 |
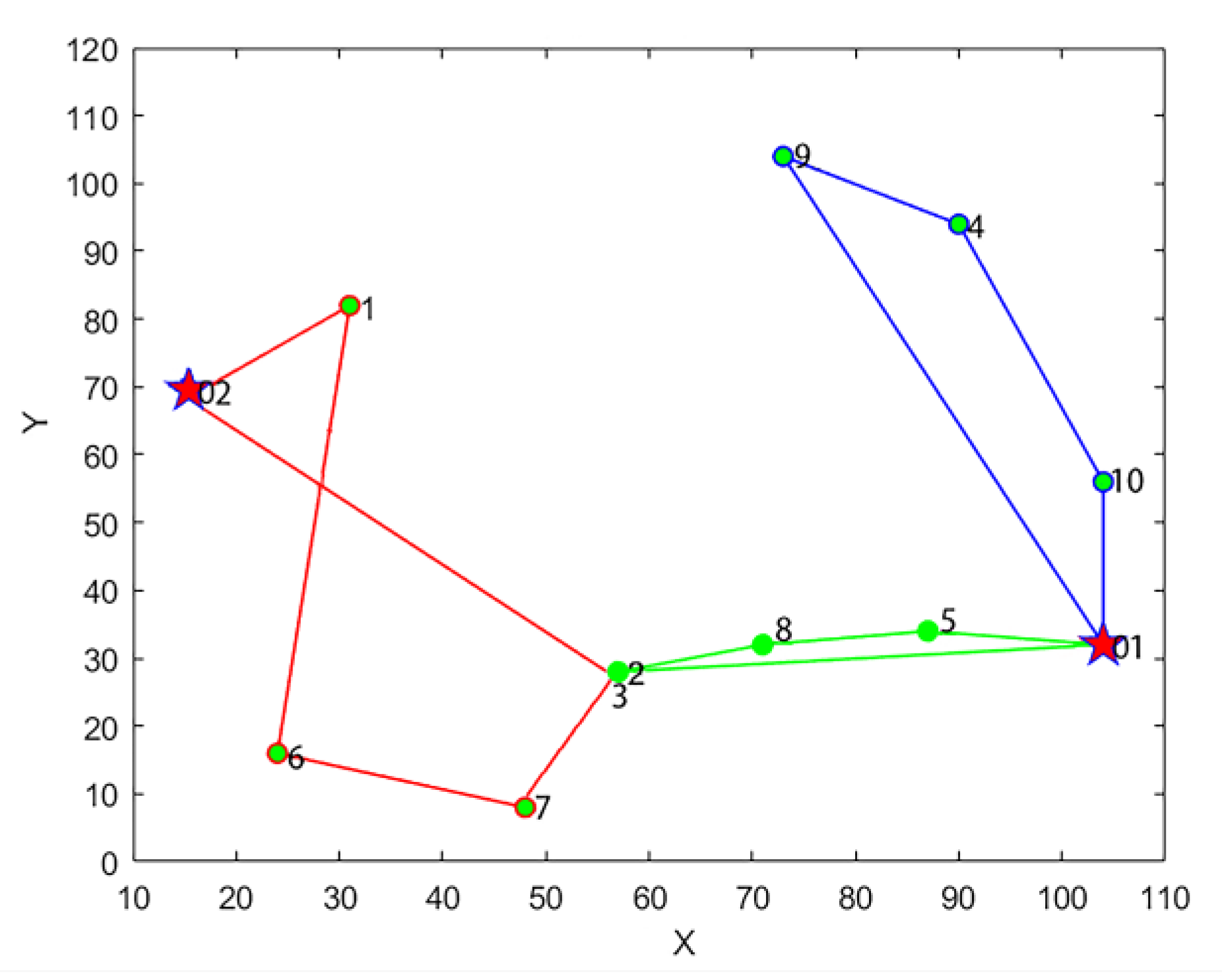
| Station | Robot | Optimal Scheduling |
|---|---|---|
| 1 | 1 | station1→2→8→5→station1 |
| 2 | station1→10→4→9→station1 | |
| 2 | 3 | Station2→3→7→6→1→station2 |
| 4 | station1 | |
| Obj. value | 5496.2 | |
| Experiment | Task Size | CPLEX | S-GAIPSO | GAP | ||
|---|---|---|---|---|---|---|
| CPU Time (s) | Obj. Value | CPU Time (s) | Obj. Value | |||
| 1 | 5 | 0.63 | 2563 | 0.063 | 2563 | 0% |
| 2 | 0.59 | 2436.8 | 0.065 | 2436.8 | 0% | |
| 3 | 0.86 | 2957.7 | 0.062 | 2946.3 | 0.385% | |
| 4 | 1.03 | 2531.6 | 0.065 | 2531.6 | 0% | |
| 5 | 0.92 | 2879.4 | 0.064 | 2876.9 | 0.087% | |
| 1 | 10 | 50.53 | 5597.5 | 0.105 | 5496.2 | 1.842% |
| 2 | 123.25 | 5563.2 | 0.103 | 5426.8 | 2.416% | |
| 3 | 83.9 | 5296.1 | 0.105 | 5296.1 | 0% | |
| 4 | 125.04 | 5632.4 | 0.096 | 5563.2 | 1.225% | |
| 5 | 42.69 | 5432.8 | 0.098 | 5432.8 | 0% | |
| 1 | 20 | 3965 | 10,213.3 | 0.107 | 10,110.3 | 1.008% |
| 2 | 3662 | 11,356.1 | 0.118 | 11,029.6 | 2.88% | |
| 3 | 3869 | 10,697.6 | 0.129 | 10,002.4 | 6.497% | |
| 4 | - | - | - | 12,658.6 | 0.225 | |
| 5 | - | - | - | 11,972.4 | 0.113 | |
| 1 | 30 | 4352 | 12,536.9 | 0.234 | 11,965.4 | 4.559% |
| 2 | - | N/A | 0.306 | 12,878.9 | - | |
| 3 | - | N/A | 0.166 | 12,536.9 | - | |
| 4 | - | N/A | 0.193 | 13,142.8 | - | |
| 5 | - | N/A | 0.154 | 12,897.4 | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Yang, B. Swarm Robots Cooperative and Persistent Distribution Modeling and Optimization Based on the Smart Community Logistics Service Framework. Algorithms 2022, 15, 39. https://doi.org/10.3390/a15020039
Zhang M, Yang B. Swarm Robots Cooperative and Persistent Distribution Modeling and Optimization Based on the Smart Community Logistics Service Framework. Algorithms. 2022; 15(2):39. https://doi.org/10.3390/a15020039
Chicago/Turabian StyleZhang, Meng, and Bin Yang. 2022. "Swarm Robots Cooperative and Persistent Distribution Modeling and Optimization Based on the Smart Community Logistics Service Framework" Algorithms 15, no. 2: 39. https://doi.org/10.3390/a15020039
APA StyleZhang, M., & Yang, B. (2022). Swarm Robots Cooperative and Persistent Distribution Modeling and Optimization Based on the Smart Community Logistics Service Framework. Algorithms, 15(2), 39. https://doi.org/10.3390/a15020039