

Hybrid InceptionV3-SVM-Based Approach for Human Posture Detection in Health Monitoring Systems

 ,
,  ,
,
Abstract
1. Introduction
Contribution
- This study implemented an innovative InceptionV3 and SVM technique to automatically identify the posture of a human. It is worth stating that the deep learning TL technique does not require hand-crafted features, unlike the ML models.
- The proposed technique used an L2 regularizer of 0.01 and L1 regularization (LASSO FS).
- To advance the accuracy of the suggested method, the study used different techniques during the data preprocessing phase. The techniques include the use of data augmentation to prevent model overfitting and the use of the LASSO (L1 regularization) feature selection (FS) algorithm to improve model training, validation, and testing accuracy.
- The layers of the DCNN model (InceptionV3) were also fine-tuned to achieve better training, validation, and testing accuracy.
- A thorough comparison of the experimental results is made using cutting-edge methods to assess how well our suggested technique performs.
2. Related Works
3. Materials and Methods
3.1. Data Collection
3.2. Model Selection
3.3. Proposed Model
3.4. Selection Based on Least Absolute Shrinkage and Selection Operator (LASSO)
3.5. Deep-Transfer Learning Based on InceptionV3
3.6. Support Vector Machine
3.7. L2 Regularization
3.8. Hyperparameter Optimization
3.9. Performance Metrics
3.10. Model Uncertainty
4. Results
4.1. Implementation Settings
4.2. Performance Evaluation
5. Discussion
6. Comparative Analysis with Existing Models
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gupta, R.; Saini, D.; Mishra, S. Posture detection using deep learning for time series data. In Proceedings of the 2020 Third International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 August 2020; pp. 740–744. [Google Scholar]
- Kang, B.R.; Her, J.G.; Lee, J.S.; Ko, T.S.; You, Y.Y. Effects of the Computer Desk Level on the musculoskeletal discomfort of Neck and Upper Extremities and EMG activities in Patients with Spinal Cord Injuries. Occup. Ther. Int. 2019, 2019, 3026150. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Kang, H.; Shin, G. Head flexion angle while using a smartphone. Ergonomics 2015, 58, 220–226. [Google Scholar] [CrossRef] [PubMed]
- Kim, E.-K.; Kim, J.S. Correlation between rounded shoulder posture, neck disability indices, and degree of forward head posture. J. Phys. Ther. Sci. 2016, 28, 2929–2932. [Google Scholar] [CrossRef] [PubMed]
- Ruiz, A.D.; Juan, M.S.; Juan, L.M.; Beatriz, G.F. Characterization of the cardiovascular and respiratory system of healthy subjects in Supine and sitting position. In Iberian Conference on Pattern Recognition and Image Analysis; Springer: Cham, Switzerland, 2019; pp. 367–377. [Google Scholar]
- Koseki, T.; Kakizaki, F.; Hayashi, S.; Nishida, N.; Itoh, M. Effect of forwarding head posture on thoracic shape and respiratory function. J. Phys. Ther. Sci. 2019, 31, 63–68. [Google Scholar] [CrossRef]
- Haque, M.F.; Akhter, S.; Tasnim, N.; Haque, M.; Paul, S.; Begum, M.; Chittagong, B. Effects of Different Sitting Postures on Forced Vital Capacity in Healthy School Children. Bangladesh Med. Res. Counc. Bull. 2019, 45, 117–121. [Google Scholar] [CrossRef]
- Bootsman, R.; Markopoulos, P.; Qi, Q.; Wang, Q.; Timmermans, A.A. Wearable technology for posture monitoring at the workplace. Int. J. Hum. Comput. Stud. 2019, 132, 99–111. [Google Scholar] [CrossRef]
- Ho, L.E.S.; Chan, J.C.P.; Chan, D.C.K.; Shum, H.P.H.; Cheung, Y.; Pong, Y.C. Improving posture classification accuracy for depth sensor-based human activity monitoring in smart environments. Comput. Vis. Image Underst. 2016, 148, 97–110. [Google Scholar] [CrossRef]
- Fragkiadakis, E.; Dalakleidi, K.V.; Nikita, K.S. Design and Development of a Sitting Posture Recognition System. In Proceedings of the 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 3364–3367. [Google Scholar]
- Wang, Z.; Yan, W.; Oates, T. Time series classification from scratch with deep neural networks: A strong baseline. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 1578–1585. [Google Scholar]
- Ogundokun, R.O.; Maskeliūnas, R.; Damaševičius, R. Human Posture Detection Using Image Augmentation and Hyperparameter-Optimized Transfer Learning Algorithms. Appl. Sci. 2022, 12, 10156. [Google Scholar] [CrossRef]
- Nunez, J.C.; Cabido, R.; Pantrigo, J.J.; Montemayor, A.S.; Velez, J.F. Convolutional neural networks and long-term memory for skeleton-based human activity and hand gesture recognition. Pattern Recognit. 2018, 76, 80–94. [Google Scholar] [CrossRef]
- Xu, J.; He, Z.; Zhang, Y. CNN-LSTM Combined Network for IoT Enabled Fall Detection Applications. J. Phys. Conf. Ser. 2019, 1267, 012044. [Google Scholar] [CrossRef]
- Dorbe, N.; Jaundalders, A.; Kadikis, R.; Nesenbergs, K. FCN and LSTM Based Computer Vision System for Recognition of Vehicle Type, License Plate Number, and Registration Country. Autom. Control. Comput. Sci. 2018, 52, 146–154. [Google Scholar] [CrossRef]
- Taylor, W.; Abbasi, Q.H.; Dashtipour, K.; Ansari, S.; Shah, S.A.; Khalid, A.; Imran, M.A. A Review of the State of the Art in Noncontact Sensing for COVID-19. Sensors 2020, 20, 5665. [Google Scholar] [CrossRef] [PubMed]
- Gogate, M.; Dashtipour, K.; Hussain, A. Visual Speech in Real Noisy Environments (VISION): A Novel Benchmark Dataset and a Baseline System Based on Deep Learning-Based Baseline System. Proc. Interspeech 2020, 2020, 4521–4525. [Google Scholar]
- Ahmed, R.; Dashtipour, K.; Gogate, M.; Raza, A.; Zhang, R.; Huang, K.; Hawalah, A.; Adeel, A.; Hussain, A. Offline Arabic Handwriting Recognition Using Deep Machine Learning: A Review of Recent Advances. In International Conference on Brain-Inspired Cognitive Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 457–468. [Google Scholar]
- Gogate, M.; Adeel, A.; Hussain, A. Deep learning-driven multimodal fusion for automated deception detection. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, USA, 27 November–1 December 2017; pp. 1–6. [Google Scholar]
- Ozturk, M.; Gogate, M.; Onireti, O.; Adeel, A.; Hussain, A.; Imran, M.A. A novel deep learning-driven, low-cost mobility prediction approach driven by deep learning for 5G cellular networks: The case of the Control/Data Separation Architecture (CDSA). Neurocomputing 2019, 358, 479–489. [Google Scholar] [CrossRef]
- Adeel, A.; Gogate, M.; Hussain, A.; Whitmer, W.M. Lip-reading driven deep learning approach for speech enhancement. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 5, 481–490. [Google Scholar] [CrossRef]
- Ogundokun, R.O.; Maskeliunas, R.; Misra, S.; Damaševičius, R. Improved CNN Based on Batch Normalization and Adam Optimizer. In International Conference on Computational Science and Its Applications; Springer: Cham, Switzerland, 2022; pp. 593–604. [Google Scholar]
- Gogate, M.; Hussain, A.; Huang, K. Random features and random neurons for Brain-Inspired Big Data Analytics. In Proceedings of the 2019 International Conference on Data Mining Workshops (ICDMW), Beijing, China, 8–11 November 2019; pp. 522–529. [Google Scholar]
- Yu, Z.; Machado, P.; Zahid, A.; Abdulghani, A.M.; Dashtipour, K.; Heidari, H.; Imran, M.A.; Abbasi, Q.H. Energy and performance trade-off optimization in heterogeneous computing through reinforcement learning. Electronics 2020, 9, 1812. [Google Scholar] [CrossRef]
- Gogate, M.; Adeel, A.; Dashtipour, K.; Derleth, P.; Hussain, A. Av Speech Enhancement Challenge Using a real noisy corpus. arXiv 2019, arXiv:1910.00424. [Google Scholar]
- Dashtipour, K.; Raza, A.; Gelbukh, A.; Zhang, R.; Cambria, E.; Hussain, A. Persent 2.0: Persian sentiment lexicon enriched with domain-specific words. In International Conference on Brain-Inspired Cognitive Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 497–509. [Google Scholar]
- Taylor, W.; Shah, S.A.; Dashtipour, K.; Zahid, A.; Abbasi, Q.H.; Imran, M.A. An intelligent noninvasive real-time human activity recognition system for next-generation healthcare. Sensors 2020, 20, 2653. [Google Scholar] [CrossRef]
- Koubaa, A.; Ammar, A.; Benjdira, B.; Al-Hadid, A.; Kawaf, B.; Al-Yahri, S.A.; Babiker, A.; Assaf, K.; Ba Ras, M. Activity monitoring of Islamic Prayer (Salat) postures using Deep Learning. In Proceedings of the 2020 6th Conference on Data Science and Machine Learning Applications (CDMA), Riyadh, Saudi Arabia, 4–5 March 2020; pp. 106–111. [Google Scholar]
- Adeel, A.; Gogate, M.; Farooq, S.; Irecitano, C.; Dashtipour, K.; Larijani, H.; Hussain, A. A survey on the role of wireless sensor networks and IoT in disaster management. In Geoological Disaster Monitoring Based on Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2019; pp. 57–66. [Google Scholar]
- Lee, J.; Joo, H.; Lee, J.; Chee, Y. Automatic Classification of Squat Posture Using Inertial Sensors: Deep Learning Approach. Sensors 2020, 20, 361. [Google Scholar] [CrossRef]
- Jiang, F.; Kong, B.; Li, J.; Dashtipour, K.; Gogate, M. Robust visual saliency optimization based on bidirectional Markov chains. Cogn. Comput. 2020, 13, 69–80. [Google Scholar] [CrossRef]
- Han, J.; Song, W.; Gozho, A.; Sung, Y.; Ji, S.; Song, L.; Wen, L.; Zhang, Q. Lora-based smart IoT application for smart city: An example of human posture detection. Wirel. Commun. Mob. Comput. 2020, 2020, 8822555. [Google Scholar] [CrossRef]
- Radu, I.; Tu, E.; Schneider, B. Relationships between body postures and collaborative learning states in an Augmented Reality Study. In International Conference on Artificial Intelligence in Education; Springer: Berlin/Heidelberg, Germany, 2020; pp. 257–262. [Google Scholar]
- Agrawal, Y.; Shah, Y.; Sharma, A. Implementation of the machine learning technique for the identification of Yoga Poses. In Proceedings of the IEEE 9th International Conference on Communication Systems and Network Technologies (CSNT), Gwalior, India, 10–12 April 2020; pp. 40–43. [Google Scholar]
- Imran, M.A.; Ghannam, R.; Abbasi, Q.H. Engineering and Technology for Healthcare; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Hussien, I.O.; Dashtipour, K.; Hussain, A. Comparison of sentiment analysis approaches using modern Arabic and Sudanese dialects. In International Conference on Brain-Inspired Cognitive Systems; Springer: Berlin/Heidelberg, Germany, 2018; pp. 615–624. [Google Scholar]
- Bourahmoune, K.; Amagasa, T. AI-powered posture training: Application of machine learning in Sitting Posture Recognition Using the LifeChair Smart Cushion. In Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence (IJCAI-19), Macao, China, 10–16 August 2019; pp. 5808–5814. [Google Scholar]
- Sandybekov, M.; Grabow, C.; Gaiduk, M.; Seepold, R. Posture tracking using a machine learning algorithm for a home AAL environment. In Intelligent Decision Technologies 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 337–347. [Google Scholar]
- Roh, J.; Park, H.-j.; Lee, K.J.; Hyeong, J.; Kim, S.; Lee, B. Sitting posture monitoring system based on a low-cost load cell using machine learning. Sensors 2018, 18, 208. [Google Scholar] [CrossRef] [PubMed]
- Rosero-Montalvo, P.D.; Peluffo-Ordóñez, D.H.; López Batista, V.F.; Serrano, J.; Rosero, E.A. Intelligent system for identifying the posture of wheelchair users using machine learning techniques. IEEE Sens. J. 2018, 19, 1936–1942. [Google Scholar] [CrossRef]
- Kornblith, S.; Shlens, J.; Le, Q.V. Do better imagenet models transfer better? In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 2661–2671. [Google Scholar]
- Ray, S. A quick review of machine learning algorithms. In Proceedings of the 2019 International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Faridabad, India, 14–16 February 2019; pp. 35–39. [Google Scholar]
- Riekert, M.; Opderbeck, S.; Wild, A.; Gallmann, E. Model selection for 24/7 pig position and posture detection by 2D camera imaging and deep learning. Comput. Electron. Agric. 2021, 187, 106213. [Google Scholar] [CrossRef]
- When to Use LASSO. Available online: https://crunchingthedata.com/when-to-use-lasso/ (accessed on 19 October 2022).
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 2818–2826. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- What is LASSO? What is LASSO Regression Definition, Examples, and Techniques (mygreatlearning.com)? Available online: https://www.mygreatlearning.com/blog/understanding-of-lasso-regression/ (accessed on 17 October 2022).
- Nagpal, A. L1 and L2 Regularization Methods. 2017. Available online: https://towardsdatascience.com/l1-and-l2-regularization-methods-ce25e7fc831c (accessed on 17 October 2022).
- Cortes, C.; Vapnik, V. Support vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Guyon, I.; Weston, J.; Barnhill, S.; Vapnik, V. Gene selection for cancer classification using support vector machines. Mach. Learn. 2002, 46, 389–422. [Google Scholar] [CrossRef]
- Prajapati, G.L.; Patle, A. When performing classification using SVM with radial basis and polynomial kernel functions. In Proceedings of the 2010, Third International Conference on Emerging Trends in Engineering and Technology, Goa, India, 19–21 November 2010; pp. 512–515. [Google Scholar]
- Kuo, B.C.; Ho, H.H.; Li, C.H.; Hung, C.C.; Taur, J.S. A kernel-based feature selection method for SVM with RBF kernel for hyperspectral image classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 317–326. [Google Scholar] [CrossRef]
- L2 Fighting Overfitting with L1 or L2 Regularization: Which One Is Better?-Neptune.ai. Available online: https://neptune.ai/blog/fighting-overfitting-with-l1-or-l2regularization#:~:text=The%20differences%20between%20L1%20and,regularization%20solution%20is%20non%2Dsparse (accessed on 17 October 2022).
- Lattanzi, E.; Donati, M.; Freschi, V. Exploring Artificial Neural Networks Efficiency in Tiny Wearable Devices for Human Activity Recognition. Sensors 2022, 22, 2637. [Google Scholar] [CrossRef]
- Islam, M.R.; Nahiduzzaman, M. Complex features extraction with deep learning model for the detection of COVID19 from CT scan images using ensemble based machine learning approach. Expert Syst. Appl. 2022, 195, 116554. [Google Scholar] [CrossRef]
- Gadekallu, T.R.; Khare, N.; Bhattacharya, S.; Singh, S.; Maddikunta, P.K.R.; Ra, I.H.; Alazab, M. Early detection of diabetic retinopathy using a PCA-firefly-based deep learning model. Electronics 2020, 9, 274. [Google Scholar] [CrossRef]
- Al Imran, A.; Amin, M.N.; Johora, F.T. Classification of chronic kidney disease using logistic regression, feedforward neural network, and wide & deep learning. In Proceedings of the 2018 International Conference on Innovation in Engineering and Technology (ICIET), Dhaka, Bangladesh, 27–28 December 2018; pp. 1–6. [Google Scholar]
- Ogundokun, R.O.; Misra, S.; Douglas, M.; Damaševičius, R.; Maskeliūnas, R. Medical Internet-of-Things Based Breast Cancer Diagnosis Using Hyperparameter-Optimized Neural Networks. Future Internet 2022, 14, 153. [Google Scholar] [CrossRef]
- Bharati, S.; Podder, P.; Mondal, M.R.H. Hybrid deep learning for detecting lung disease from X-ray images. Inform. Med. Unlocked 2020, 20, 100391. [Google Scholar] [CrossRef] [PubMed]
- Gupta, H.; Varshney, H.; Sharma, T.K.; Pachauri, N.; Verma, O.P. Comparative performance analysis of quantum machine learning with deep learning for diabetes prediction. Complex Intell. Syst. 2022, 8, 3073–3087. [Google Scholar] [CrossRef]
- Kumar, R.; Arora, R.; Bansal, V.; Sahayasheela, V.J.; Buckchash, H.; Imran, J.; Naryanan, N.; Pandian, G.N.; Raman, B. Accurate prediction of COVID-19 using chest X-ray images through deep feature learning model with SMOTE and machine learning classifiers. MedRxiv 2020. [Google Scholar] [CrossRef]
- Alalharith, D.M.; Alharthi, H.M.; Alghamdi, W.M.; Alsenbel, Y.M.; Aslam, N.; Khan, I.U.; Shahin, S.Y.; Dianiskova, S.; Alhareky, M.S.; Barouch, K.K. A deep learning-based approach for the detection of early signs of gingivitis in orthodontic patients using faster region-based convolutional neural networks. Int. J. Environ. Res. Public Health 2020, 17, 8447. [Google Scholar] [CrossRef] [PubMed]
- Le, N.Q.K.; Ho, Q.T.; Nguyen, V.N.; Chang, J.S. BERT-Promoter: An improved sequence-based predictor of DNA promoter using BERT pre-trained model and SHAP feature selection. Comput. Biol. Chem. 2022, 99, 107732. [Google Scholar] [CrossRef]
- Le, N.Q.K.; Ho, Q.T. Deep transformers and convolutional neural network in identifying DNA N6-methyladenine sites in cross-species genomes. Methods 2022, 204, 199–206. [Google Scholar] [CrossRef]
- Gal, Y.; Ghahramani, Z. Dropout as a Bayesian approximation: Representing model uncertainty in deep learning. In Proceedings of the 33rd International Conference on Machine Learning, New York, NY, USA, 20–22 June 2016; Volume 48, pp. 1050–1059. [Google Scholar]
- Zhang, C.; Ma, Y. (Eds.) Ensemble Machine Learning: Methods and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Chu, G. Machine learning for Automation of Chromosome based Genetic Diagnostics. Master’s Thesis, KTH, School of Electrical Engineering and Computer Science (EECS), Stockholm, Sweden, 2020. [Google Scholar]
- Gochoo, M.; Akhter, I.; Jalal, A.; Kim, K. Stochastic remote sensing event classification over adaptive posture estimation via multifused data and deep belief network. Remote Sens. 2021, 13, 912. [Google Scholar] [CrossRef]
- Dedeoğlu, Y.; Töreyin, B.U.; Güdükbay, U.; Çetin, A.E. Silhouette-based method for object classification and human action recognition in video. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2006; pp. 64–77. [Google Scholar]
- Ghazal, S.; Khan, U.S. Human posture classification using skeleton information. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–4. [Google Scholar]
- Luna-Perejón, F.; Montes-Sánchez, J.M.; Durán-López, L.; Vazquez-Baeza, A.; Beasley-Bohórquez, I.; Sevillano-Ramos, J.L. IoT device for Classification Using Artificial Neural Networks. Electronics 2021, 10, 1825. [Google Scholar] [CrossRef]
- Wai, A.P.; Foo, S.F.; Huang, W.; Biswas, J.; Hsia, C.C.; Liou, K.; Yap, P. Classification of lying posture for pressure ulcer prevention. J. Healthc. Eng. 2010, 1, 217–238. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Posture Class | Number of Instances | Training | Validation | Testing |
|---|---|---|---|---|
| Bending | 1200 | 768 | 192 | 240 |
| Lying | 1200 | 768 | 192 | 240 |
| Sitting | 1200 | 768 | 192 | 240 |
| Standing | 1200 | 768 | 192 | 240 |
| Total | 4800 | 3072 | 768 | 960 |
| DTL (s) | Hyperparameters | |||||
|---|---|---|---|---|---|---|
| Optimizer | Learning Rate | Batch Size | Epochs | Dropout | Activation | |
| InceptionV3 | Adam | 0.0010 | 32 | 50 | 0.5 | Relu |
| ResNet50 | Adam | 0.0002 | 32 | 50 | 0.5 | Relu |
| DenseNet121 | Adam | 0.0003 | 32 | 50 | 0.5 | Relu |
| InceptionV3-SVM | Adam | 0.0010 | 32 | 50 | 0.5 | Relu |
| Predicted Class | ||
|---|---|---|
| Actual Class | True Positive (TP) | False Negative (FN) |
| False Positive (FP) | True Negative (TN) | |
| Model | Learning Rate | Epochs | Early Stopping | Loss | Optimizer | Batch Size |
|---|---|---|---|---|---|---|
| InceptionV3 | 0.00024 | 50 | Epoch 45 | CategoricalCrossentropy | Adam | 32 |
| ResNet50 | 0.00024 | 50 | Epoch 50 | CategoricalCrossentropy | Adam | 32 |
| DenseNet121 | 0.00034 | 50 | Epoch 40 | CategoricalCrossentropy | Adam | 32 |
| InceptionV3-SVM | 0.00100 | 50 | Epoch 39 | Square_hinge | Adam | 32 |
| Model | Model Parameters |
|---|---|
| InceptionV3 | Total params: 24,179,236 Trainable params: 2,376,452 Non-trainable params: 21,802,784 |
| ResNet50 | Total params: 30,158,468 Trainable params: 6,570,756 Non-trainable params: 23,587,712 |
| DenseNet121 | Total params: 9,151,812 Trainable params: 2,114,308 Non-trainable params: 7,037,504 |
| InceptionV3-SVM | Total params: 24,179,236 Trainable params: 18,054,308 Non-trainable params: 6,124,928 |
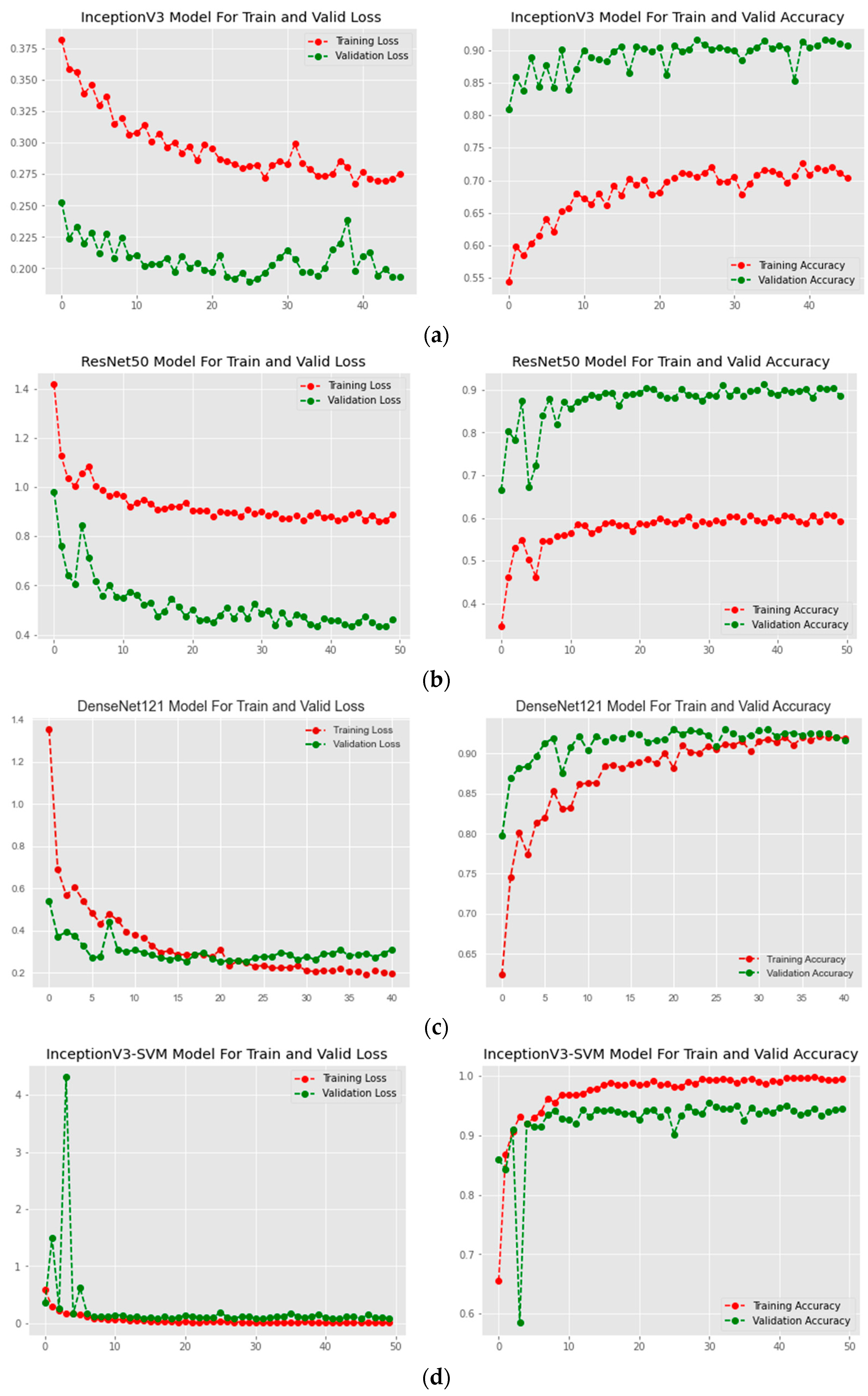
| Model | Training Accuracy (%) | Validation Accuracy (%) | Testing Accuracy (%) | Training Loss | Validation Loss | Testing Loss |
|---|---|---|---|---|---|---|
| InceptionV3 | 70.38 | 90.76 | 89.58 | 0.28 | 0.19 | 0.21 |
| ResNet50 | 59.18 | 88.67 | 88.44 | 0.89 | 0.46 | 0.49 |
| DenseNet121 | 91.89 | 91.67 | 92.29 | 0.19 | 0.31 | 0.33 |
| InceptionV3-SVM | 99.58 | 94.53 | 95.42 | 0.01 | 0.09 | 0.09 |
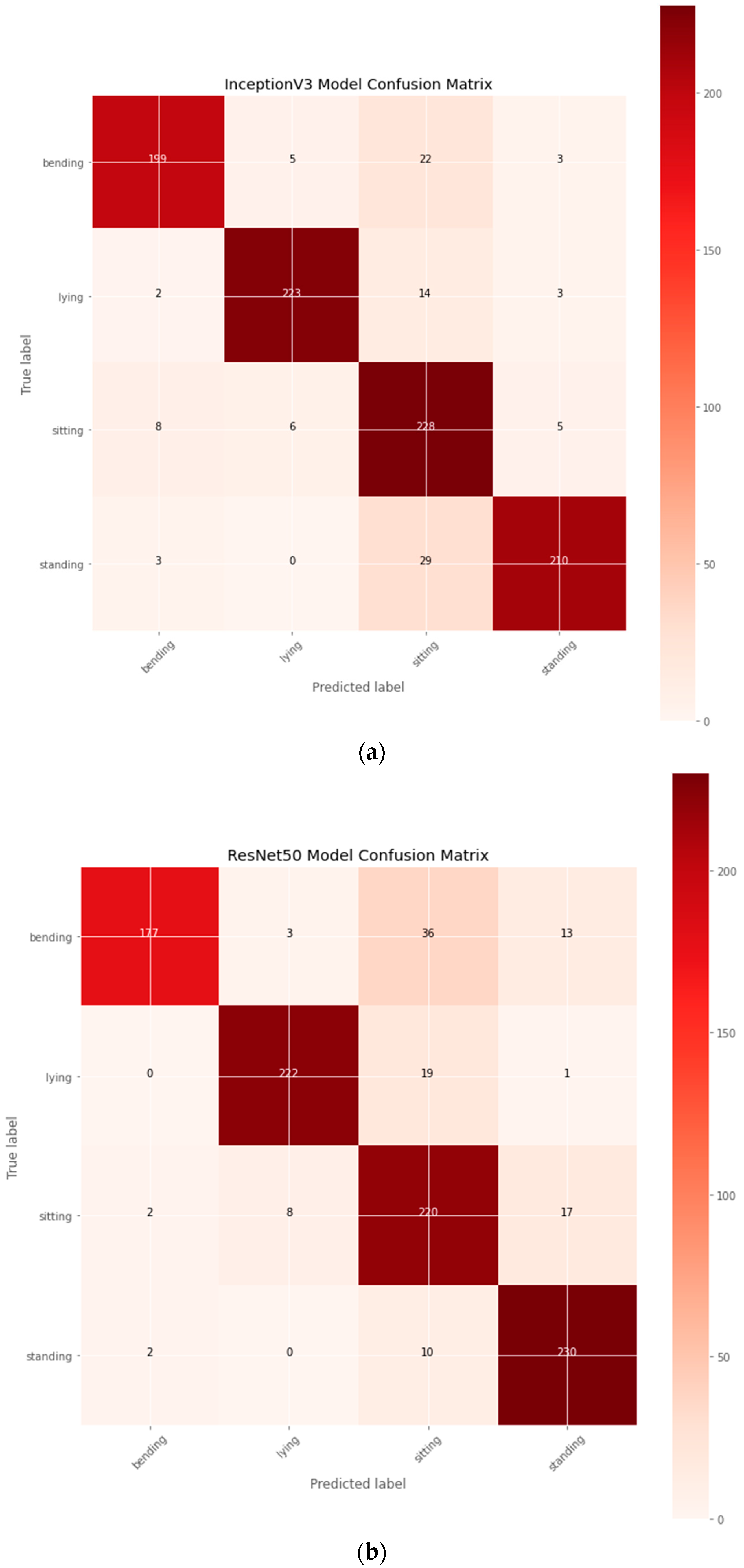
| Model | Accuracy | AUC | TP |
|---|---|---|---|
| InceptionV3 | 0.90 | 0.96 | 860 |
| ResNet50 | 0.88 | 0.96 | 849 |
| DenseNet121 | 0.92 | 0.99 | 886 |
| InceptionV3-SVM | 0.95 | 0.99 | 916 |
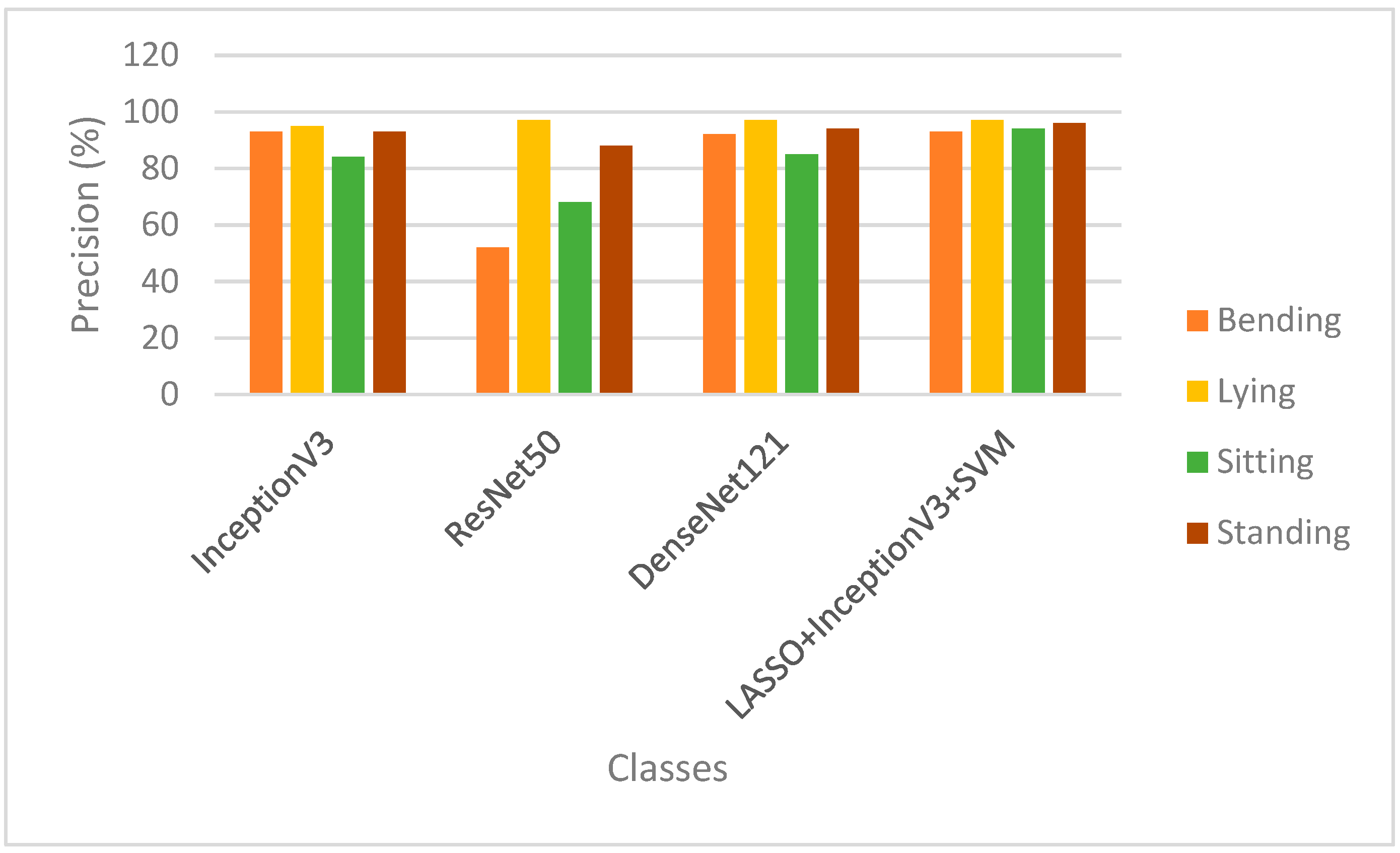
| Model | Average Precision | Average Recall | Average F1-Score |
|---|---|---|---|
| InceptionV3 | Precision | Recall | F1-score |
| ResNet50 | 0.91 | 0.90 | 0.90 |
| DenseNet121 | 0.90 | 0.88 | 0.91 |
| CNN | 0.93 | 0.92 | 0.93 |
| InceptionV3-SVM | 0.95 | 0.96 | 0.95 |
| Authors | Model | Accuracy (%) |
|---|---|---|
| Ghazal & Khan [71] | Rule-based | 93.00 |
| Luna-Perejón, Montes-Sánchez et al. [72] | Artificial Neural Network | 81.00 |
| Wai et al. [73] | SVM | 93.00 |
| Gochoo et al. [69] | Gaussian Mixture Model | 92.50 |
| Dedeoğlu et al. [70] | Supervised learning algorithm | 76.88 |
| Proposed Model | InceptionV3-SVM | 95.42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogundokun, R.O.; Maskeliūnas, R.; Misra, S.; Damasevicius, R. Hybrid InceptionV3-SVM-Based Approach for Human Posture Detection in Health Monitoring Systems. Algorithms 2022, 15, 410. https://doi.org/10.3390/a15110410
Ogundokun RO, Maskeliūnas R, Misra S, Damasevicius R. Hybrid InceptionV3-SVM-Based Approach for Human Posture Detection in Health Monitoring Systems. Algorithms. 2022; 15(11):410. https://doi.org/10.3390/a15110410
Chicago/Turabian StyleOgundokun, Roseline Oluwaseun, Rytis Maskeliūnas, Sanjay Misra, and Robertas Damasevicius. 2022. "Hybrid InceptionV3-SVM-Based Approach for Human Posture Detection in Health Monitoring Systems" Algorithms 15, no. 11: 410. https://doi.org/10.3390/a15110410
APA StyleOgundokun, R. O., Maskeliūnas, R., Misra, S., & Damasevicius, R. (2022). Hybrid InceptionV3-SVM-Based Approach for Human Posture Detection in Health Monitoring Systems. Algorithms, 15(11), 410. https://doi.org/10.3390/a15110410