Safe Path Planning of Mobile Robot Based on Improved A* Algorithm in Complex Terrains


Abstract
:1. Introduction
2. A* Algorithm
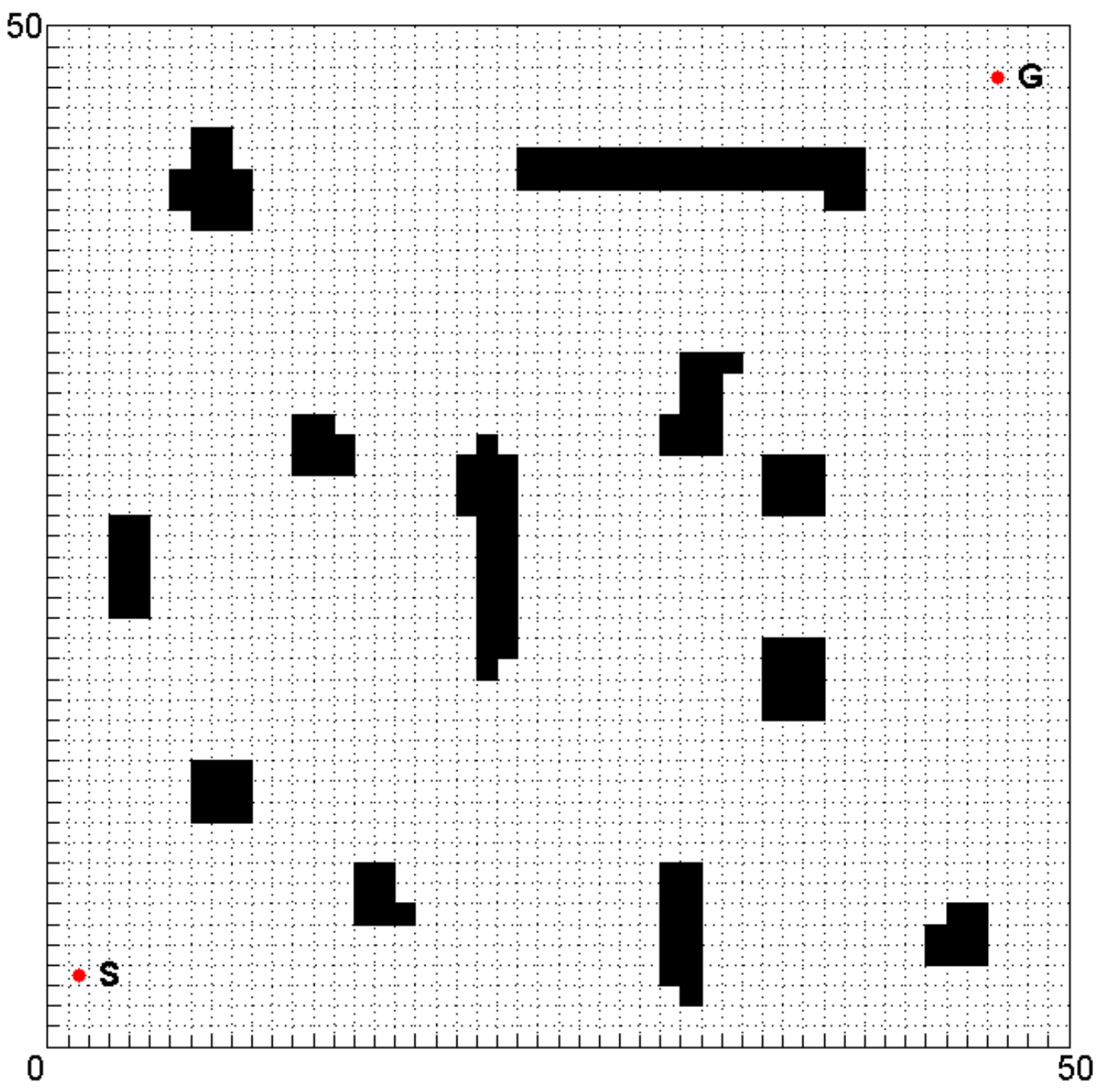
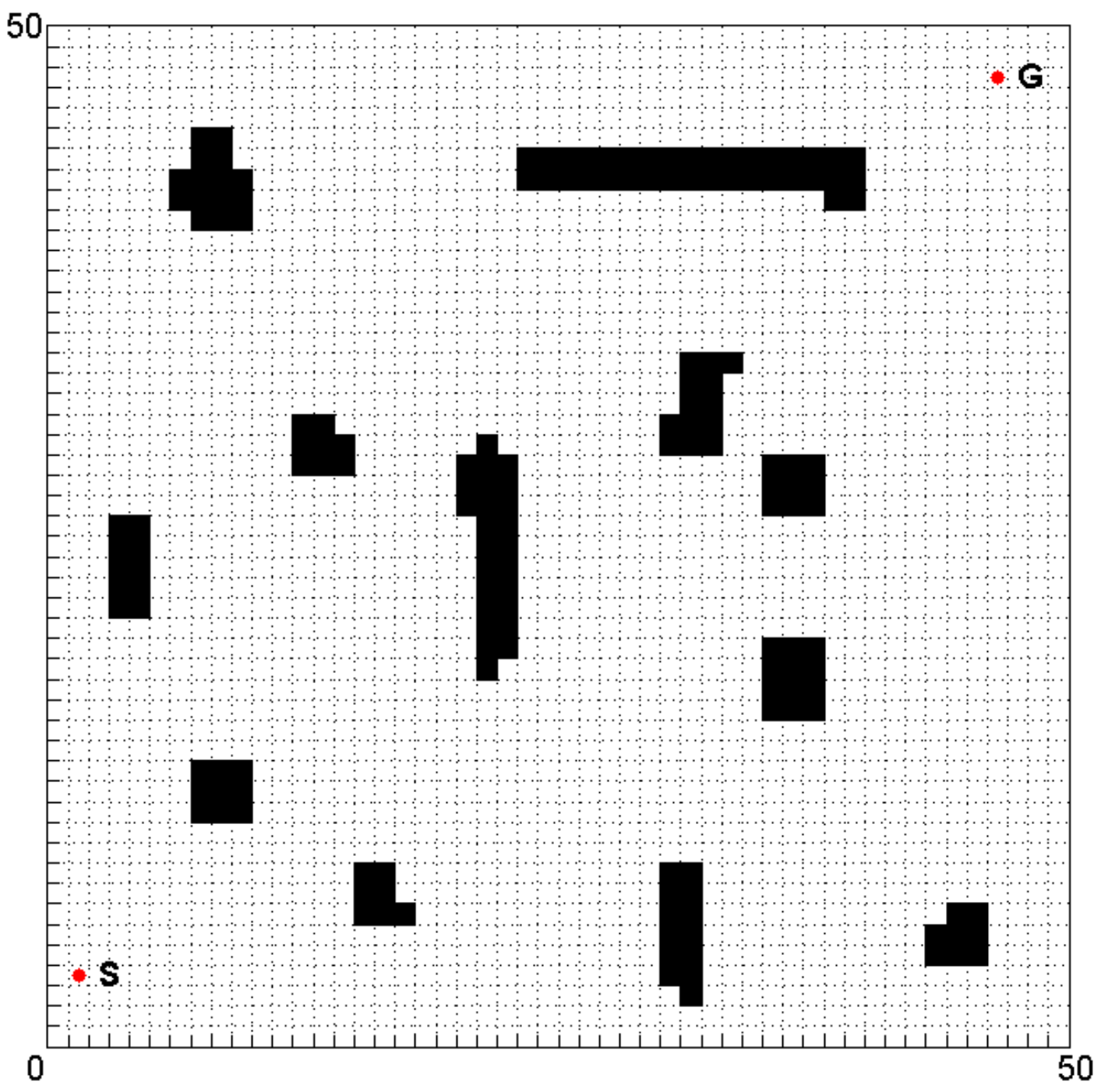
2.1. Environment Model
2.2. Algorithm Procedures
| Algorithm 1: A*(S, G) |
| 1 for each state X in the environment model: 2 t(X) = new; 3 Initialize the OPEN list to be empty; Place state S on the OPEN list; t(S) = open; g(S) = 0; 4 while t(G) ≠ closed: 5 Find the state, X, on the OPEN list with minimum estimated path cost; 6 for each neighbor Y of X: 7 if Y is not in a forbidden region 8 if t(Y) = new 9 p(Y) = X; g(Y) = g(X) + c(X, Y); f(Y) = g(Y) + h(Y); Place Y on the OPEN list; t(Y) = open; 10 else if t(Y) = open 11 if g(X) + c(X, Y) + h(Y) < f(Y) 12 g(Y) = g(X) + c(X, Y); f(Y) = g(Y) + h(Y); p(Y) = X; 13 Delete X from the OPEN list; t(X) = closed; 14 if OPEN = NULL 15 return NO-PATH; 16 The optimal path from S to G is obtained. |
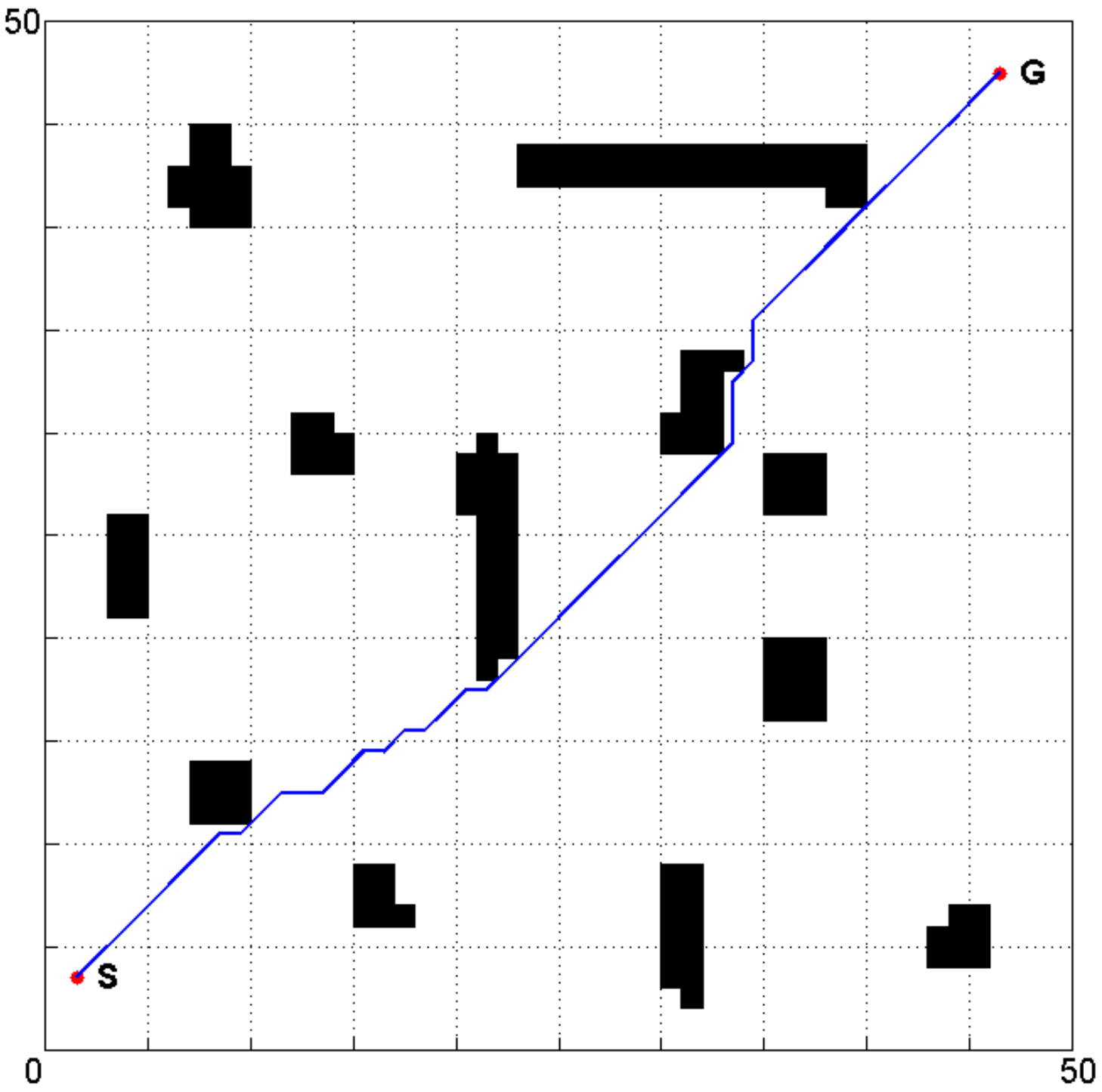
2.3. Algorithm Simulation
3. Improvement of A* Algorithm
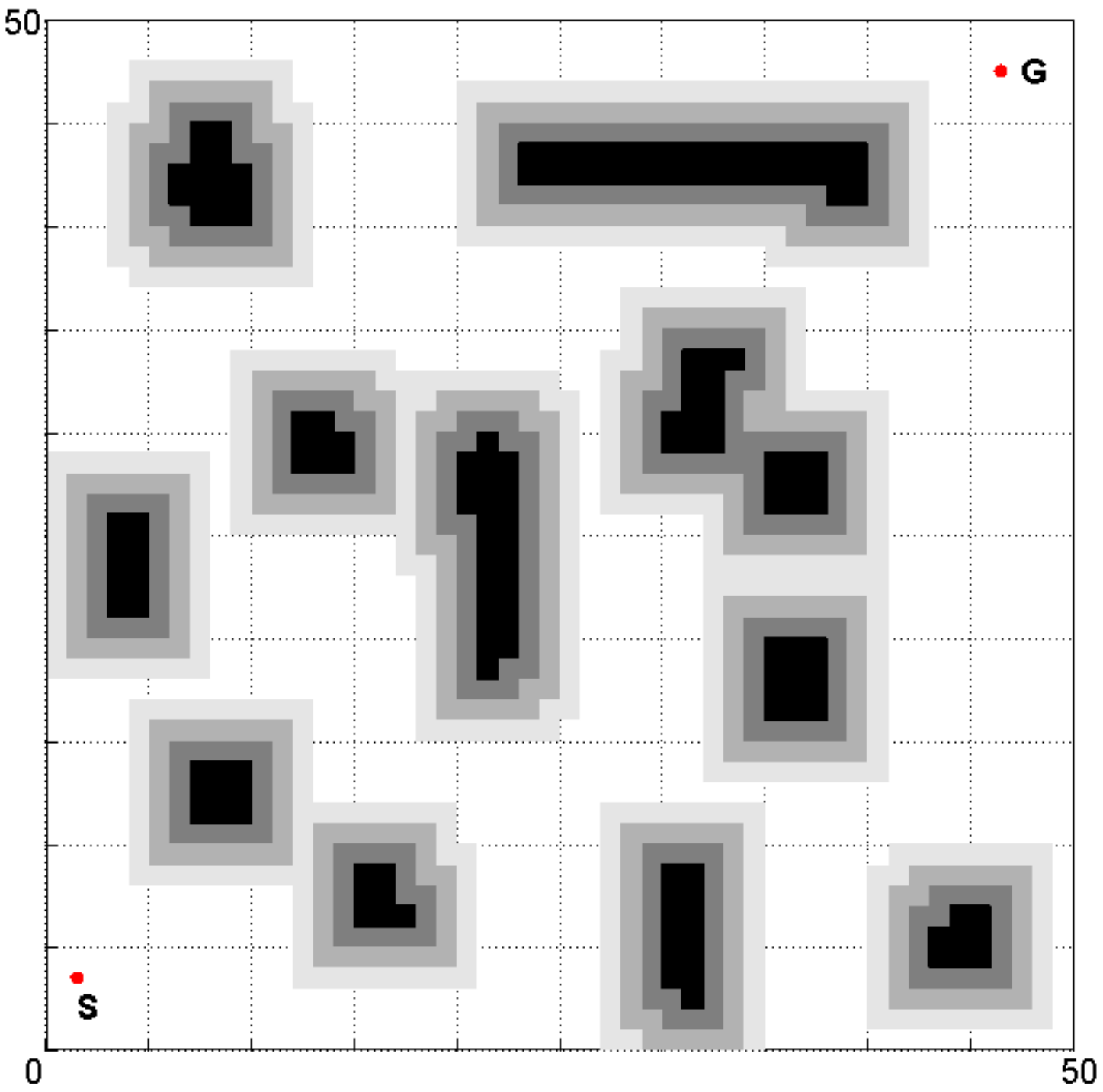
3.1. Improved Environment Model
- The danger coefficient of each state is calculated according to the shortest distance from the state to obstacles. If there is more than one nearest obstacle, only one time computation is needed.
- The danger coefficient of a state is inversely proportional to the minimum distance between the state and obstacles.
- If the minimum distance between a state and obstacles is not less than the given safe distance, the danger coefficient of the state is set to zero.
3.2. Improved Evaluation Function
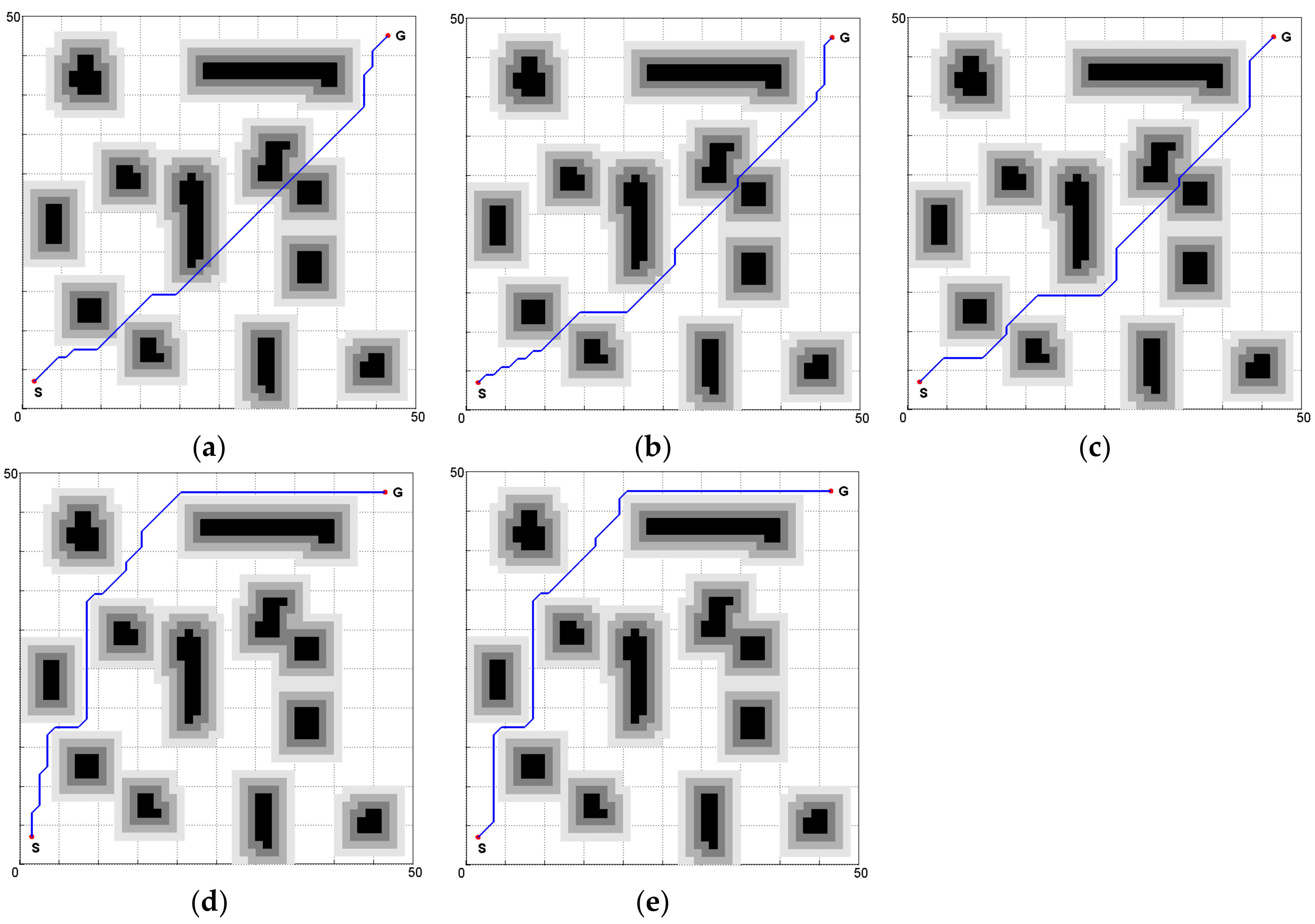
3.3. Algorithm Simulation
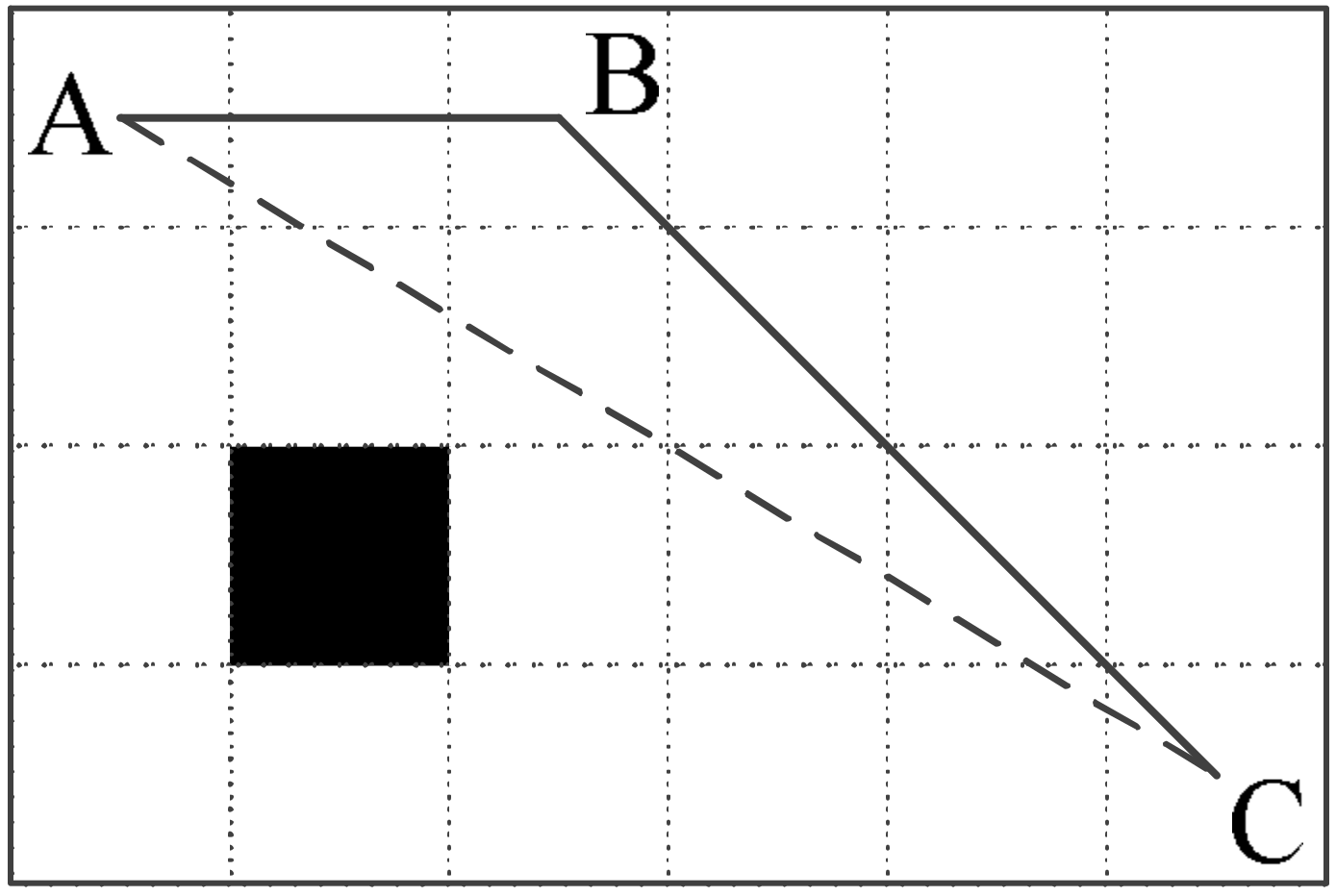
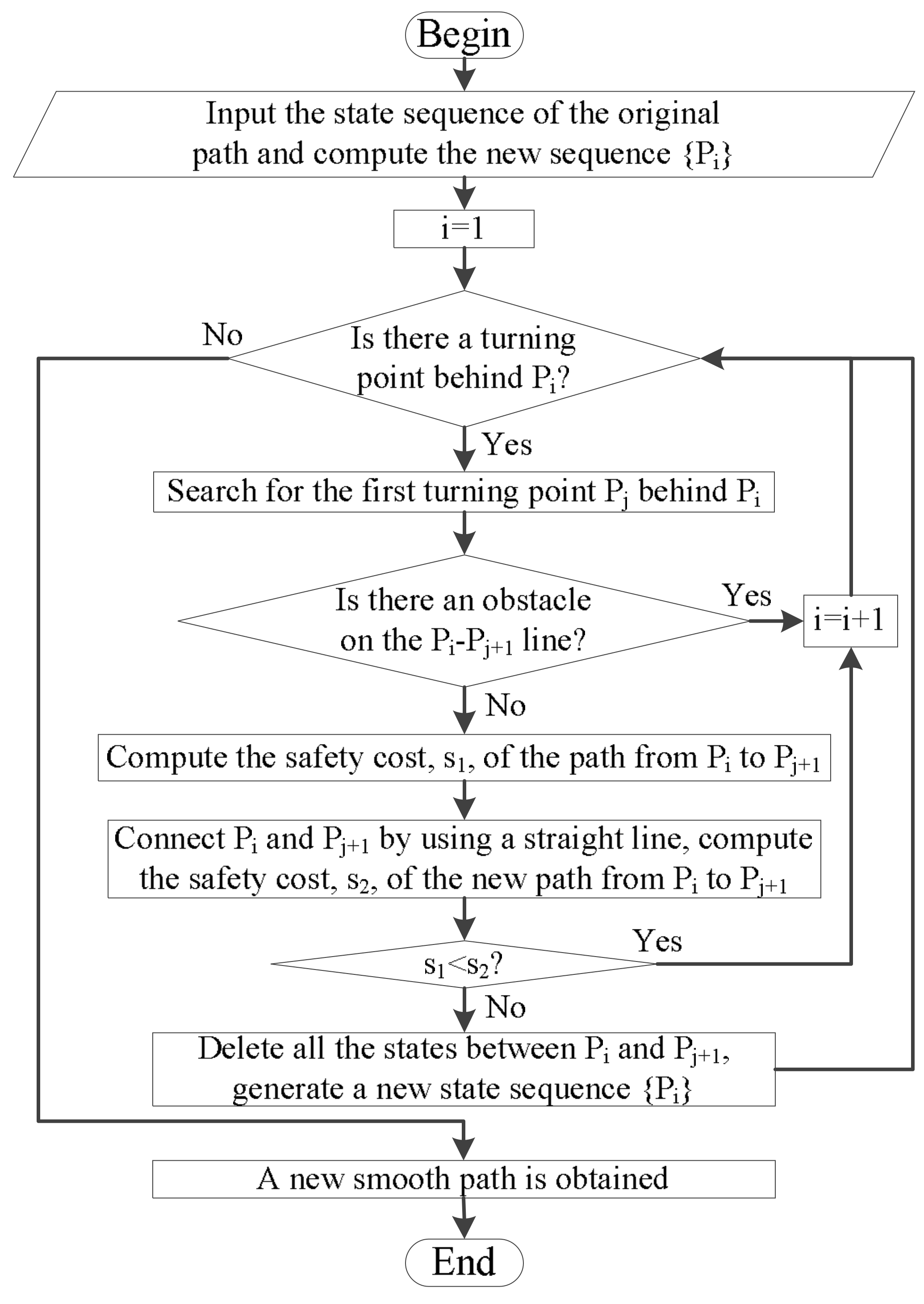
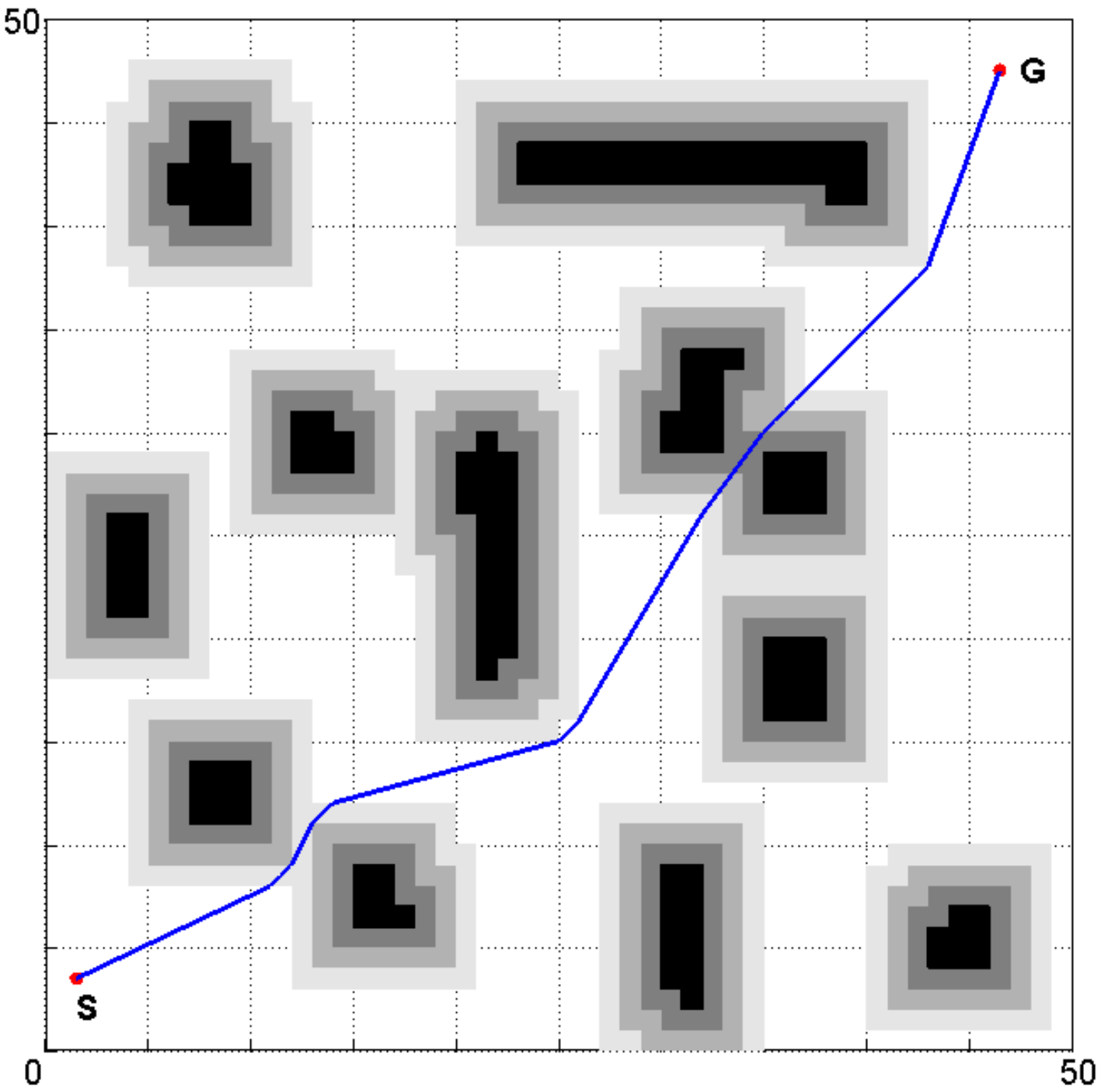
3.4. Path Smoothing Method
3.5. Performance Analysis of the Improved A* algorithm
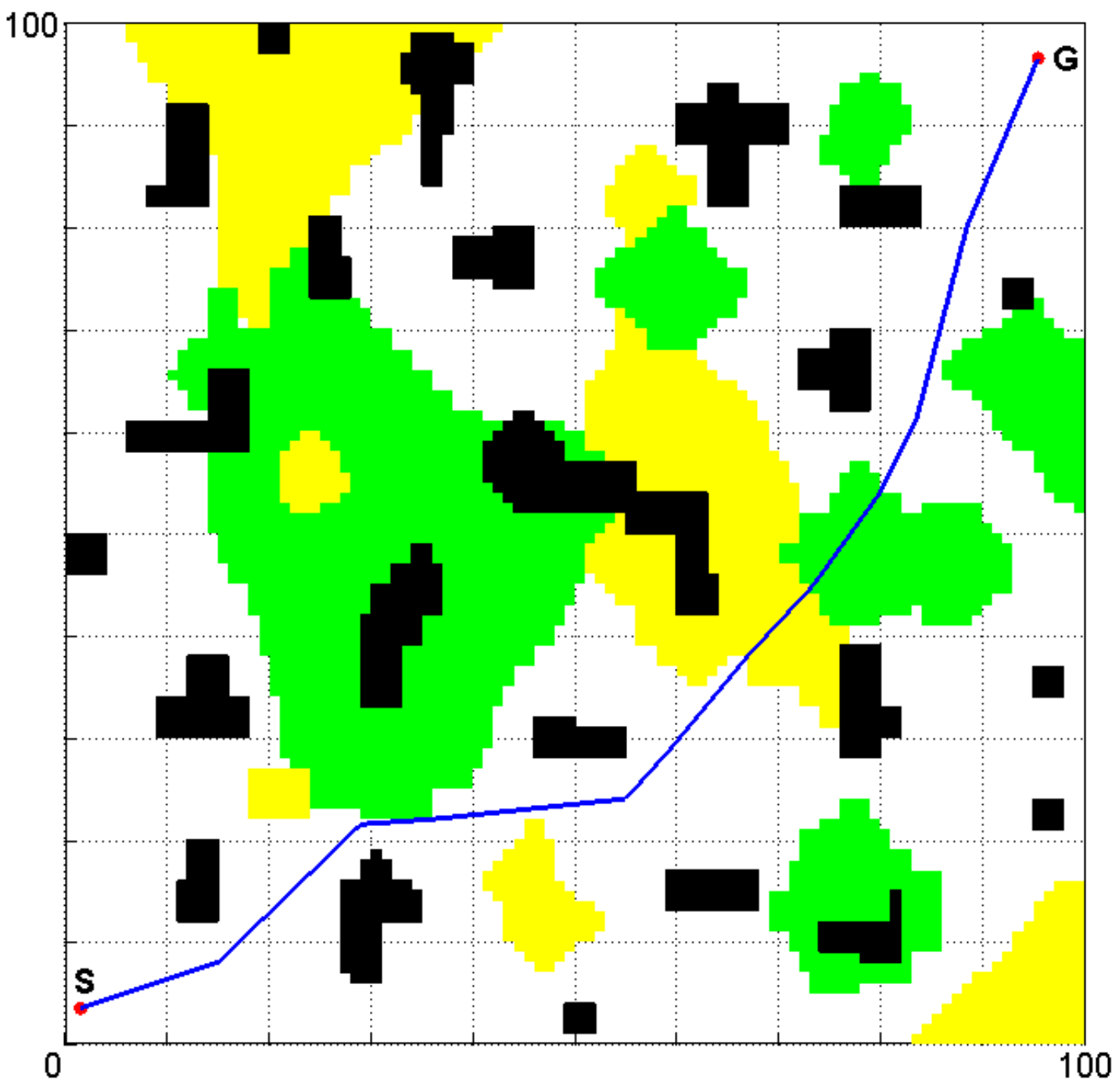
4. Path Planning in Complex Terrains
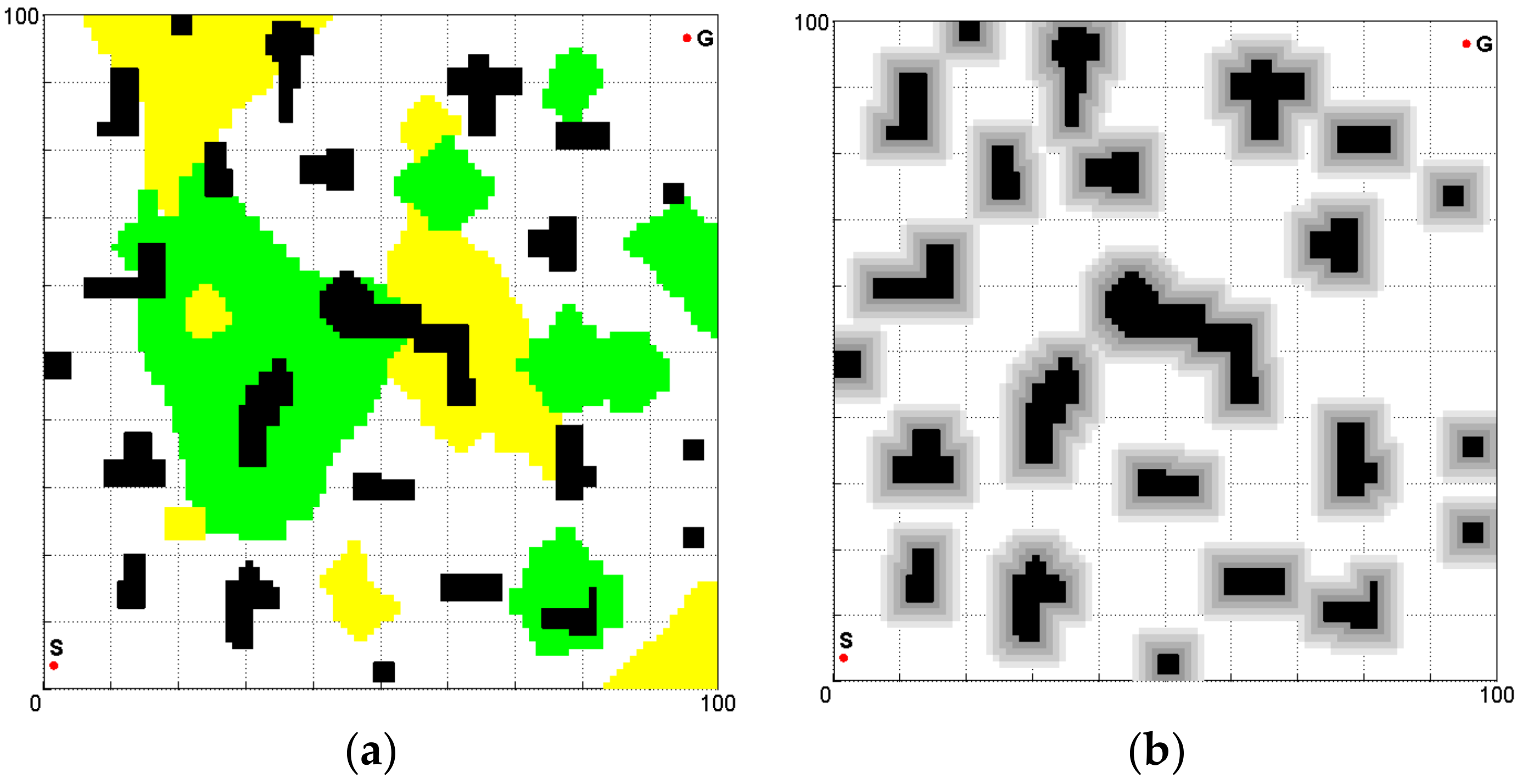
4.1. Complex Terrain Environment Model
4.2. Evaluation Function
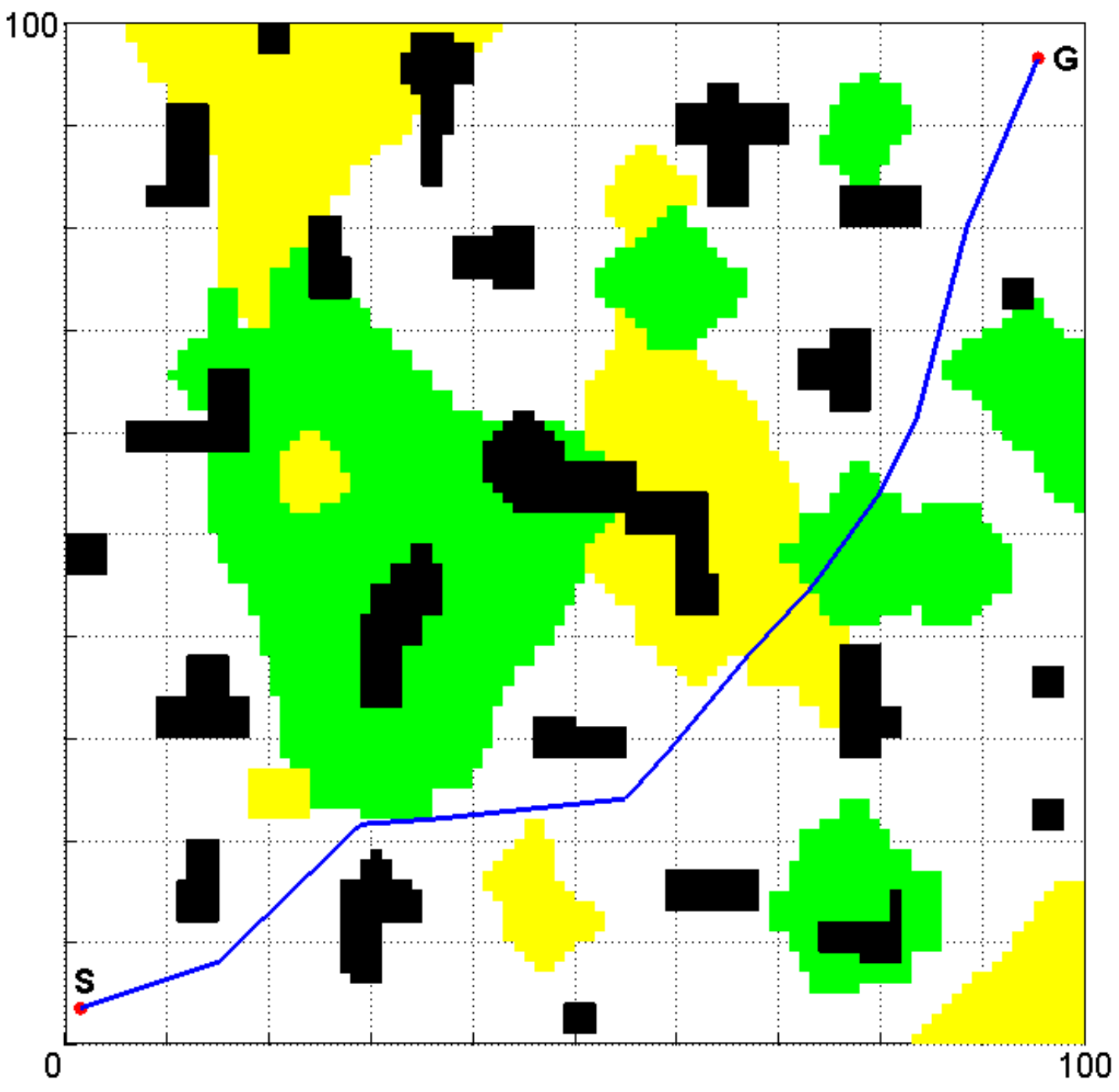
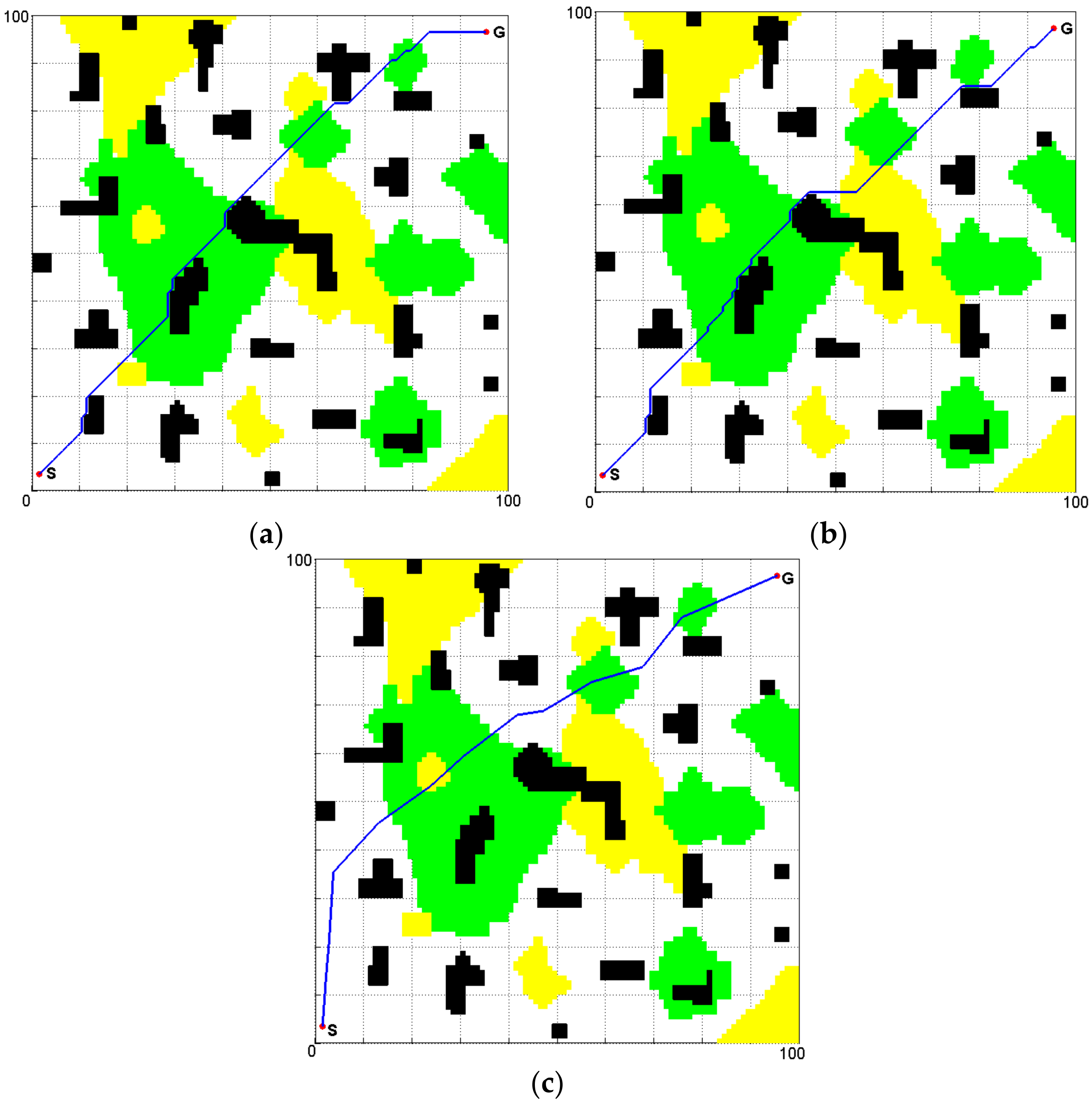
4.3. Simulation Experiments and Analysis in Complex Terrain Environment
5. Conclusions and Suggestions
- In light of the disadvantages of the conventional A* algorithm, an improved A* algorithm is presented in this paper for the path planning of mobile robot. A new environment modeling method is proposed in which the evaluation function of A* algorithm is improved by taking into account of the safety cost. Accordingly, the planned path can be farther away from obstacles to ensure the safety of the path. A new path smoothing method is also proposed which introduces a path evaluation mechanism into the smoothing process; this is applied to smooth the path without safety reduction. Compared to the conventional A* algorithm, although the improved A* algorithm increased the path length by 0.5% and computation time by a factor of three, it reduced the turning times and sum of turning angles by 35.7% and 73.2%, respectively. It also reduced the length of risky and dangerous paths by 69.0% and 83.3%, respectively. Compared to the improved RRT* algorithm, the improved A* algorithm increased the path length and the sum of turning angles by 1.2% and 35.8%, respectively; however, it reduced the turning times by 18.2%, and also reduced the length of risky and dangerous paths by 33.0% and 38.9%, respectively. The computation time of the improved RRT* algorithm was two orders of magnitude larger than that of the improved A* algorithm.
- In order to solve the path planning problems in complex terrains, a complex terrain environment model, which considered flat land, grassland, mountain land, and obstacles, is established in this paper. The distance and safety cost of the evaluation function of the A* algorithm were converted into time cost so that the units could be unified and their physical meanings clarified. Compared to the ACO algorithm, although the path length was increased by 1.7%, the improved A* algorithm reduced the turning times by 41.2%, reduced the sum of turning angles by 80.3%, reduced the length of risky and dangerous paths by 67.5% and 96.3% respectively, reduced the computation time by 70.6%, and it eventually led to a 37.5% fall in the movement time of the robot. Compared to the conventional A* algorithm, the improved A* algorithm increased the path length by 1.7% and increased the computation time by a factor of three; however, it reduced the turning times by 54.5%, reduced the sum of turning angles by 84.8%, reduced the length of risky and dangerous paths by 67.1% and 96.3% respectively, and it eventually led to a 37.6% fall in the movement time of the robot. Compared to the improved RRT* algorithm, the improved A* algorithm increased the length of risky and dangerous paths by 92.0% and 3.3 times respectively; however, it reduced the path length by 0.3%, reduced the turning times by 9.1%, reduced the sum of turning angles by 22.1%, reduced the movement time by 2.1%, and more importantly, the computation time dropped in two orders of magnitude.
- Compared to the conventional A* algorithm, the improved A* algorithm achieved remarkable results and was more suitable for the path planning of mobile robots. However, the path searching time was considerably increased, especially for the path planning of complex terrain environment whose consuming time was increased by a factor of three. Through analysis, we can know that it is because of the substantial increase in the number of traversal states of the improved A* algorithm. Therefore, it is suggested that the future work should be focused on improving the computational efficiency of the improved A* algorithm so as to enhance its real-time performance.
- In our recent studies, we assume that the environment is completely known. Accordingly, path planning research in unknown environments may be the next step of our research.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Choset, H.; Lynch, K.M.; Hutchinson, S.; Kantor, G.A.; Burgard, W.; Kavraki, L.E.; Thrun, S. Principles of Robot Motion: Theory, Algorithms, and Implementations; MIT Press: Cambridge, MA, USA, 2005; pp. 1–15. [Google Scholar]
- LaValle, S.M. Planing Algorithms; Cambridge University Press: Cambridge, UK, 2006; pp. 1–26. [Google Scholar]
- Wei, W.; Ouyang, D.T.; Lu, S.; Feng, Y.X. Multiobjective path planning under dynamic uncertain environment. Chin. J. Comput. 2011, 34, 836–846. [Google Scholar] [CrossRef]
- Wang, F.; Wan, L.; Xu, Y.R.; Zhang, Y.K. Path planning based on improved artificial potential field for autonomous underwater vehicles. J. Huazhong Univ. Sci. Technol. 2011, 39, 184–187. [Google Scholar]
- Gu, Q.; Dou, F.Q.; Ma, F. Energy optimal path planning of electric vehicle based on improved A* algorithm. Trans. Chin. Soc. Agric. Mach. 2015, 46, 316–322. [Google Scholar]
- Zhu, D.Q.; Yan, M.Z. Survey on technology of mobile robot path planning. Control Decis. 2010, 25, 961–967. [Google Scholar]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Lavalle, S.M. Rapidly-exploring random trees: A new tool for path planning. In Algorithmic and Computational Robotics New Directions; Taylor & Francis: Oxford, UK, 1998; pp. 293–308. [Google Scholar]
- Hsu, D. Randomized Single-Query Motion Planning in Expansive Spaces. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2000. [Google Scholar]
- Karaman, S.; Frazzoli, E. Incremental sampling-based algorithms for optimal motion planning. In Proceedings of the Robotics: Science and Systems Conference, Zaragoza, Spain, 27–30 June 2010; pp. 5326–5332. [Google Scholar]
- Yu, Z.Z.; Yan, J.H.; Zhao, J.; Chen, Z.F.; Zhu, Y.H. Mobile robot path planning based on improved artificial potential field method. J. Harbin Inst. Technol. 2011, 43, 50–55. [Google Scholar]
- Li, G.H.; Tong, S.G.; Cong, F.Y.; Yamashita, A.; Asama, H. Improved artificial potential field-based simultaneous forward search method for robot path planning in complex environment. In Proceedings of the IEEE/SICE International Symposium on System Integration, Nagoya, Japan, 11–13 December 2015; pp. 760–765. [Google Scholar]
- Thaker, N.; Nikolakopoulos, G.; Gustafsson, T. On-line path planning for an articulated vehicle based on model predictive control. In Proceedings of the IEEE International Conference on Control Applications, Hyderabad, India, 28–30 August 2013; pp. 772–777. [Google Scholar]
- Chen, W.D.; Zhu, Q.G. Mobile robot path planning based on fuzzy algorithm. Acta Electron. Sin. 2011, 39, 971–974, 980. [Google Scholar]
- Mobadersany, P.; Khanmohammadi, S.; Ghaemi, S. A fuzzy multi-stage path-planning method for a robot in a dynamic environment with unknown moving obstacles. Robotica 2015, 33, 1869–1885. [Google Scholar] [CrossRef]
- Wang, K.; Shi, W.R. Back propagation neural network to the application of cleaning robot’s path planning. J. Chongqing Univ. 2009, 32, 349–352. [Google Scholar]
- Shorakaei, H.; Vahdani, M.; Imani, B.; Gholami, A. Optimal cooperative path planning of unmanned aerial vehicles by a parallel genetic algorithm. Robotica 2016, 34, 823–836. [Google Scholar] [CrossRef]
- Shi, E.X.; Chen, M.M.; Li, J.; Huang, Y.M. Research on method of global path-planning for mobile robot based on ant-colony algorithm. Trans. Chin. Soc. Agric. Mach. 2014, 45, 53–57. [Google Scholar]
- Zeng, M.R.; Xi, L.; Xiao, A.M. The free step length ant colony algorithm in mobile robot path planning. Adv. Robot. 2016, 30, 1509–1514. [Google Scholar] [CrossRef]
- Ziadi, S.; Njah, M.; Chtourou, M. PSO optimization of mobile robot trajectories in unknown environments. In Proceedings of the 13th International Multi-Conference on System, Signals & Devices, Leipzig, Germany, 21–24 March 2016; pp. 774–782. [Google Scholar]
- Mohanty, P.K.; Parhi, D.R. Optimal path planning for a mobile robot using cuckoo search algorithm. J. Exp. Theor. Artif. Intell. 2016, 28, 35–52. [Google Scholar] [CrossRef]
- Wang, W.F.; Xu, C.; Yin, B.B.; Du, Z.J. Path planning in dynamic environment based on improved shuffled frog leaping algorithm. J. Jilin Univ. 2016, 54, 857–861. [Google Scholar]
- Shi, H.; Cao, W.; Zhu, S.L.; Zhu, B.S. Application of an improved A* algorithm in shortest route planning. Geomat. Spat. Inf. Technol. 2009, 32, 208–211. [Google Scholar]
- Lu, Z.Y.; Cai, T.J. Gravity aided navigation path plan research based on A* algorithm. J. Chin. Inert. Technol. 2010, 18, 556–560. [Google Scholar]
- Zhan, W.W.; Wang, W.; Chen, N.C.; Wang, C. Path planning strategies for UAV based on improved A* algorithm. Geomat. Inf. Sci. Wuhan Univ. 2015, 40, 315–320. [Google Scholar]
- Szczerba, R.J.; Galkowski, P.; Glickstein, I.S.; Ternullo, N. Robust algorithm for real-time route planning. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 869–878. [Google Scholar] [CrossRef]
- Zhang, Y.N.; Gao, J.Y. Three-dimensional route planning based on an advanced A* algorithm. Flight Dyn. 2008, 26, 48–51. [Google Scholar]
- Xin, Y.; Liang, H.W.; Du, M.B.; Mei, T.; Wang, Z.L.; Jiang, R.H. An improved A* algorithm for searching infinite neighbourhoods. Robot 2014, 36, 627–633. [Google Scholar]
- Wang, H.W.; Ma, Y.; Xie, Y.; Guo, M. Mobile robot optimal path planning based on smoothing A* algorithm. J. Tongji Univ. 2010, 38, 1647–1650. [Google Scholar]
- Shan, W.; Meng, Z.D. Smooth path design for mobile service robots based on improved A* algorithm. J. Southeast Univ. 2010, 40, 155–161. [Google Scholar]
- Wang, D.J. Indoor mobile-robot path planning based on an improved A* algorithm. J. Tsinghua Univ. 2012, 52, 1085–1089. [Google Scholar]
- Harabor, D.; Grastien, A. Online graph pruning for pathfinding on grid maps. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 7–11 August 2011; pp. 1114–1119. [Google Scholar]
- Cheng, L.P.; Liu, C.X.; Yan, B. Improved hierarchical A-star algorithm for optimal parking path planning of the large parking lot. In Proceedings of the IEEE International Conference on Information & Automation, Hailar, China, 26–31 July 2014; pp. 695–698. [Google Scholar]
- Hernández, J.D.; Moll, M.; Vidal, E.; Carreras, M.; Kavraki, L.E. Planning feasible and safe paths online for autonomous underwater vehicles in unknown environments. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Moore, E.F. The shortest path through a maze. In Proceedings of the International Symposium on the Theory of Switching, Cambridge, MA, USA, 2–5 April 1957; Harvard University Press: Cambridge, MA, USA, 1959; pp. 285–292. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ω1:ω2 | Path Length (m) | Length of Risky Path | Length of Dangerous Path |
|---|---|---|---|
| 0.9:0.1 | 66.74 | 22.63 | 12.73 |
| 0.7:0.3 | 68.50 | 17.97 | 6.66 |
| 0.5:0.5 | 70.25 | 13.31 | 5.24 |
| 0.3:0.7 | 80.21 | 0 | 0 |
| 0.1:0.9 | 80.21 | 0 | 0 |
| Path | Path Length (m) | Turning Times (Times) | Sum of Turning Angles (Degree) | Length of Risky Path (m) | Length of Dangerous Path (m) |
|---|---|---|---|---|---|
| Before smoothing | 70.25 | 12 | 540.0 | 13.31 | 5.24 |
| After smoothing | 66.49 | 9 | 168.89 | 12.89 | 5.16 |
| Parameter | Conventional A* | Improved RRT* | Improved A* |
|---|---|---|---|
| Path length (m) | 66.15 | 65.72 | 66.49 |
| Turning times (times) | 14 | 11 | 9 |
| Sum of turning angles (degree) | 630.00 | 124.36 | 168.89 |
| Length of risky path (m) | 41.53 | 19.25 | 12.89 |
| Length of dangerous path (m) | 30.83 | 8.45 | 5.16 |
| Computation time (s) | 0.06 | 17.84 | 0.24 |
| Minimum Distance (m) | Speed Reduction Ratio |
|---|---|
| 0~1 | 50% |
| 1~2 | 40% |
| 2~3 | 30% |
| 3~4 | 20% |
| 4~5 | 10% |
| >5 | 0% |
| K | M | α | β | ρ | Q |
|---|---|---|---|---|---|
| 15 | 18 | 1 | 4 | 0.35 | 140 |
| Parameter | ACO | Conventional A* | Improved RRT* | Improved A* |
|---|---|---|---|---|
| Path length (m) | 141.89 | 141.89 | 144.72 | 144.29 |
| Turning times (times) | 17 | 22 | 11 | 10 |
| Sum of turning angles (degree) | 765.00 | 990.00 | 193.84 | 150.92 |
| Length of risky path (m) | 86.88 | 85.78 | 14.71 | 28.25 |
| Length of dangerous path (m) | 57.18 | 56.32 | 0.49 | 2.10 |
| Computation time (s) | 2.18 | 0.16 | 47.39 | 0.64 |
| Movement time (s) | 127.23 | 127.54 | 81.30 | 79.56 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.-M.; Li, M.-L.; Yang, L. Safe Path Planning of Mobile Robot Based on Improved A* Algorithm in Complex Terrains. Algorithms 2018, 11, 44. https://doi.org/10.3390/a11040044
Zhang H-M, Li M-L, Yang L. Safe Path Planning of Mobile Robot Based on Improved A* Algorithm in Complex Terrains. Algorithms. 2018; 11(4):44. https://doi.org/10.3390/a11040044
Chicago/Turabian StyleZhang, Hong-Mei, Ming-Long Li, and Le Yang. 2018. "Safe Path Planning of Mobile Robot Based on Improved A* Algorithm in Complex Terrains" Algorithms 11, no. 4: 44. https://doi.org/10.3390/a11040044
APA StyleZhang, H.-M., Li, M.-L., & Yang, L. (2018). Safe Path Planning of Mobile Robot Based on Improved A* Algorithm in Complex Terrains. Algorithms, 11(4), 44. https://doi.org/10.3390/a11040044