Bilayer Local Search Enhanced Particle Swarm Optimization for the Capacitated Vehicle Routing Problem


Abstract
1. Introduction
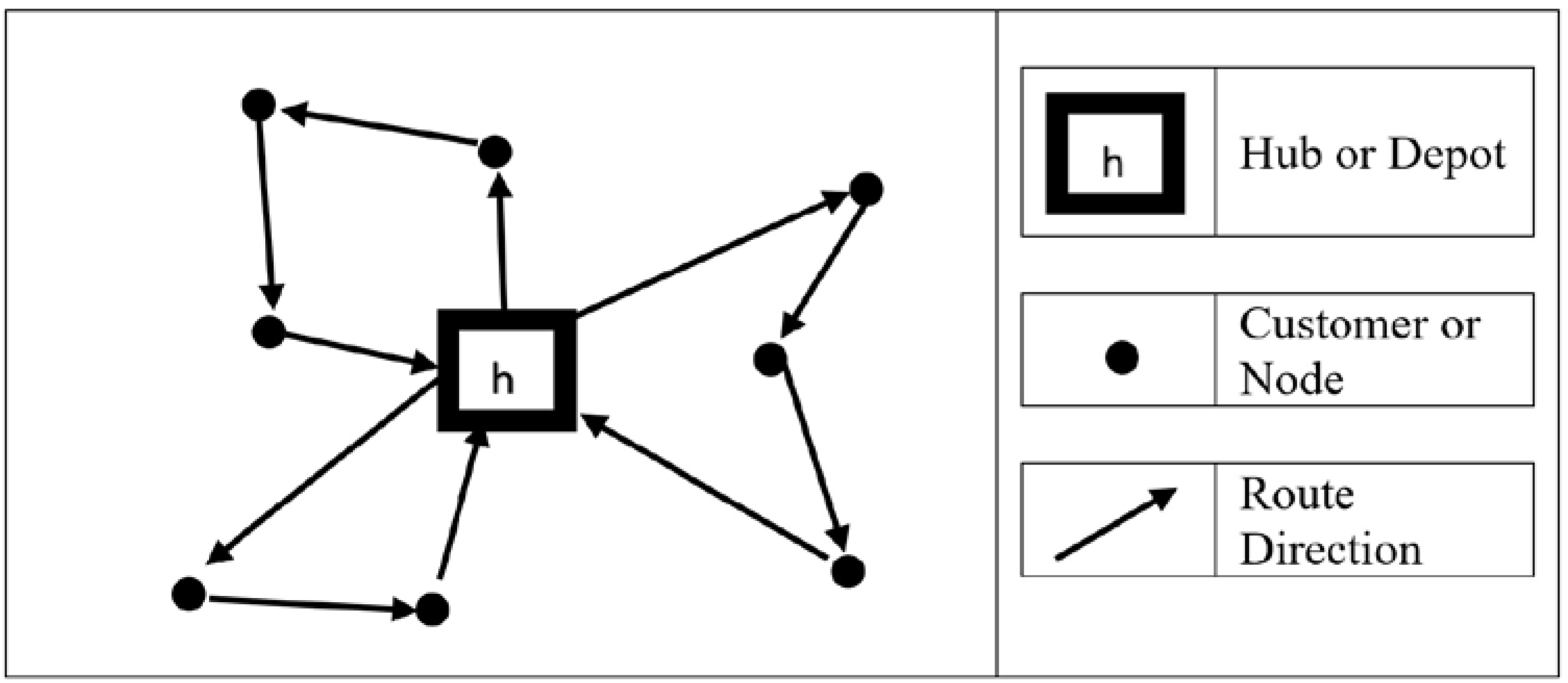
2. Mathematical Formulation
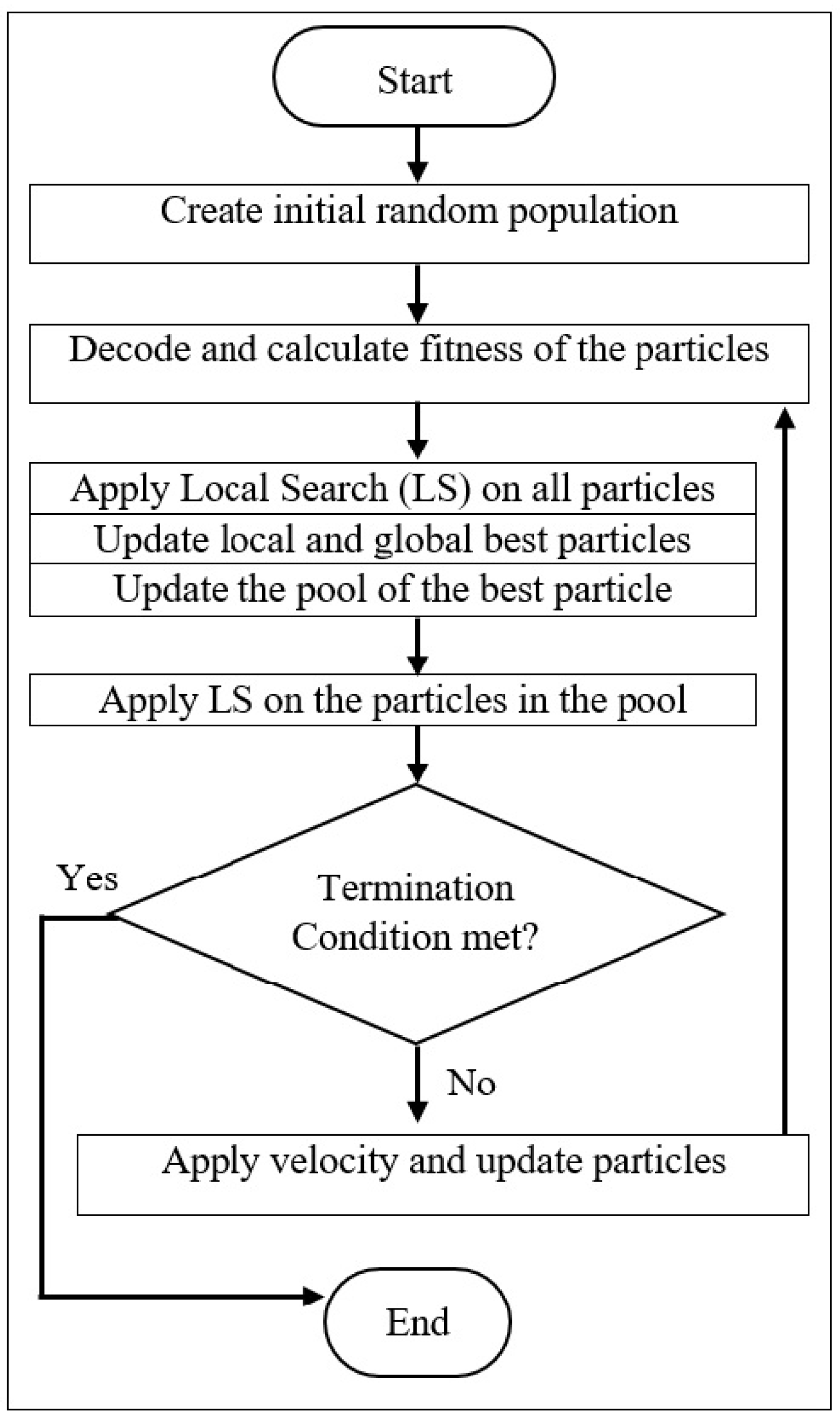
3. Proposed Methodology
3.1. PSO for CVRP
3.2. Decoding the Customer Vector
| Algorithm 1. Distance-based decoding method. |
| Inputs x: customer vector m: number of vehicles given in the problem statement Outputs routesMade: a Boolean value Indicating whether routes could successfully been made route: The routes made Procedure 1. for r = 1 to m do 2. route(r) = x(r); // put the first m nodes in x as the starting nodes of the m routes 3. end for 4. i = m; 5. while i <= |x| do 6. i = i + 1; // index of the next node in x to insert in any route 7. sortedRoutes = indices of routes sorted in non-increasing order based on distances of their last nodes to x(i) 8. assigned = 0; 9. for j = 1 to |sortedRoutes| do 10. r = sortedRoutes(j); 11. if addition of x(i) to the end of route(r) satisfies Equations (5) and (6) then 12. add x(i) to the end of route(r); 13. assigned = 1; 14. go to 18; 15. end if 16. end for 17. if assigned == 0 // x(i) was not assigned to any route in the loop from line 10 to 17 then 18. maxRouteSize = maximum number of nodes assigned to a route 19. for k = maxRouteSize down to 1 do 20. sortedRoutes = indices of routes sorted in non-increasing order based on the increases of the distances if the kth nodes of the routes are replaced by x(i) 21. for j = 1 to |sortedRoutes| do 22. r = sortedRoutes(j); 23. if replacing kth node of route(r) by x(i) satisfies Equations (5) and (6) then 24. add kth node to the end of x; // to be assigned again 25. replace kth node of route(r) by x(i); 26. assigned = 1; 27. go to 33; 28. end if 29. end for 30. end for 31. end if 32. if assigned == 0 then 33. routesMade = 0; 34 return; 35. end if 36. end while 37. routesMade = 1; 38. return; |
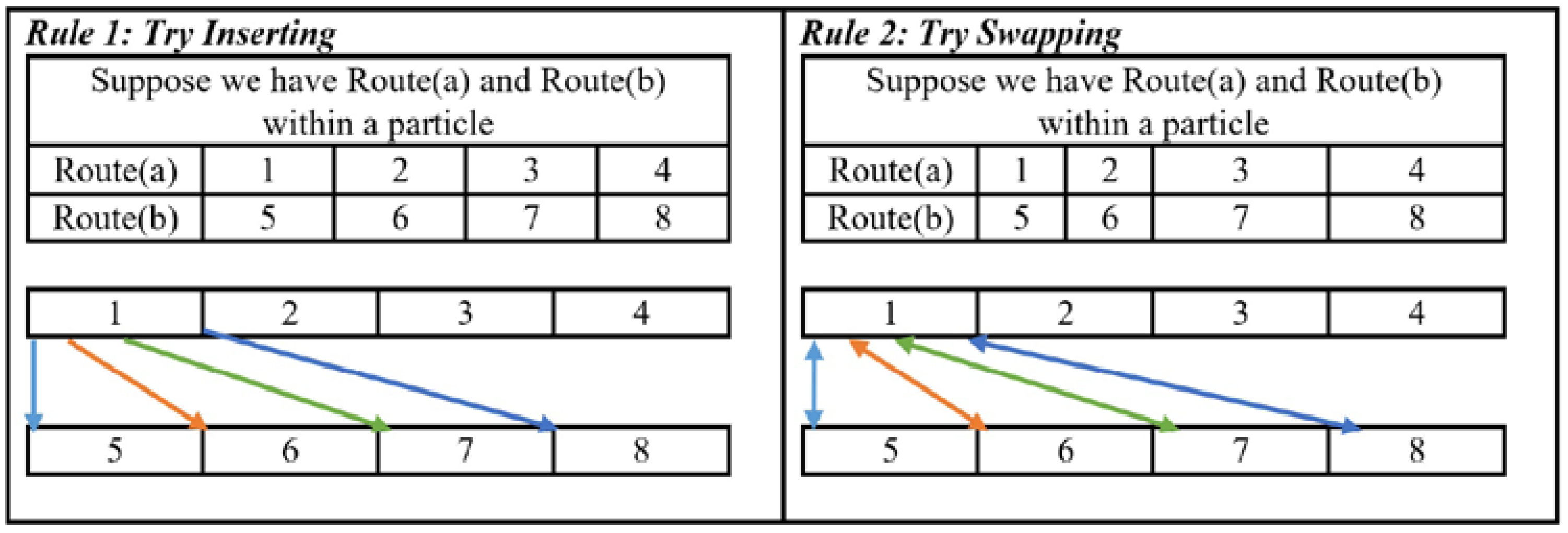
3.3. Proposed Bilayer Local Search
3.3.1. The First Layer Local Search
3.3.2. The Second Layer Local Search
| Algorithm 2. Refining the pool of solutions |
| Input P: a pool of global best solutions Output P’: The refined pool of solutions Procedure 1. for each solution s in P do 2. if s is the best solution in P then 3. add s to P’ 4. else if s was updated in the previous iteration then 5. add s to P’ 6. end if 7. end for |
4. Computational Result Analysis
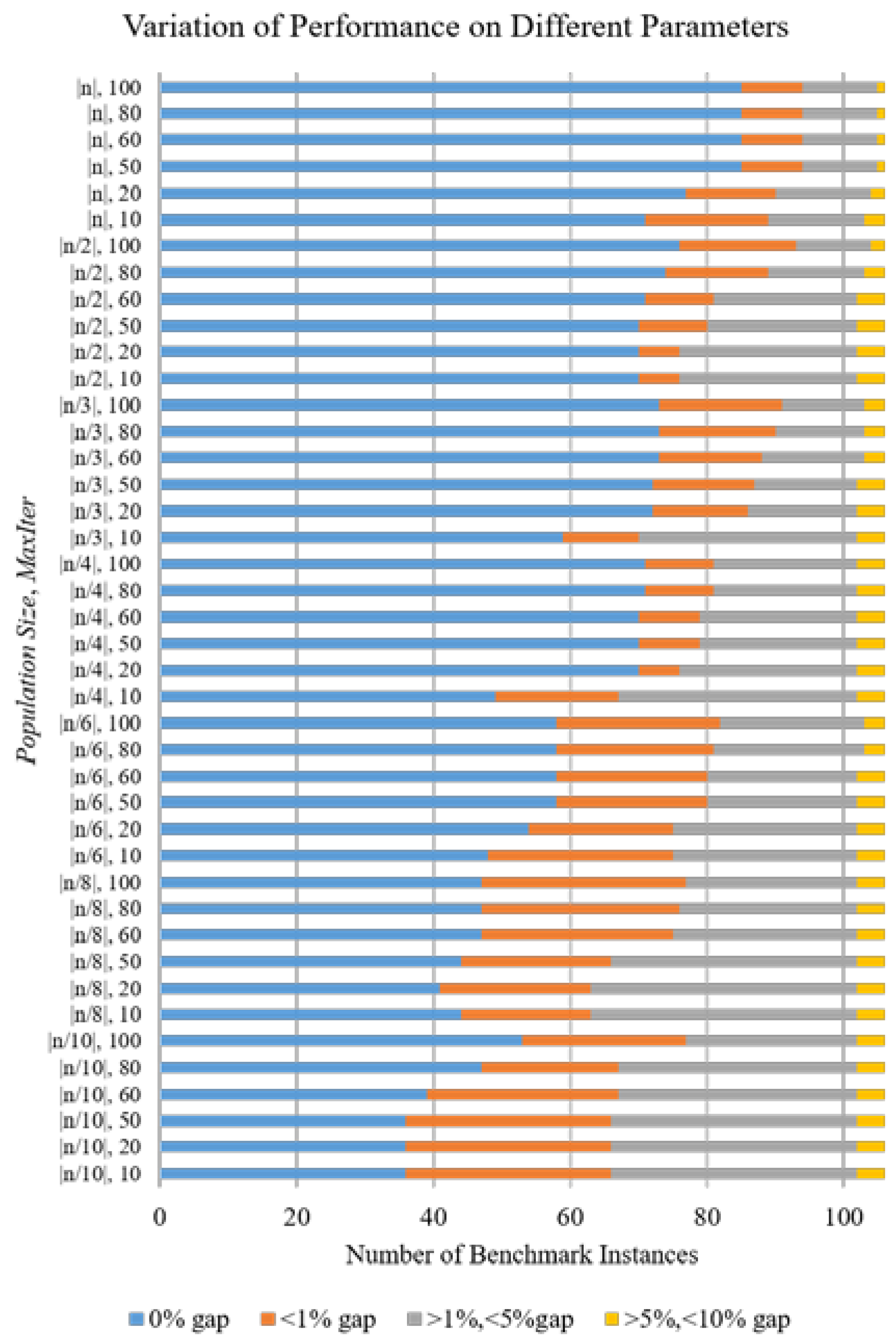
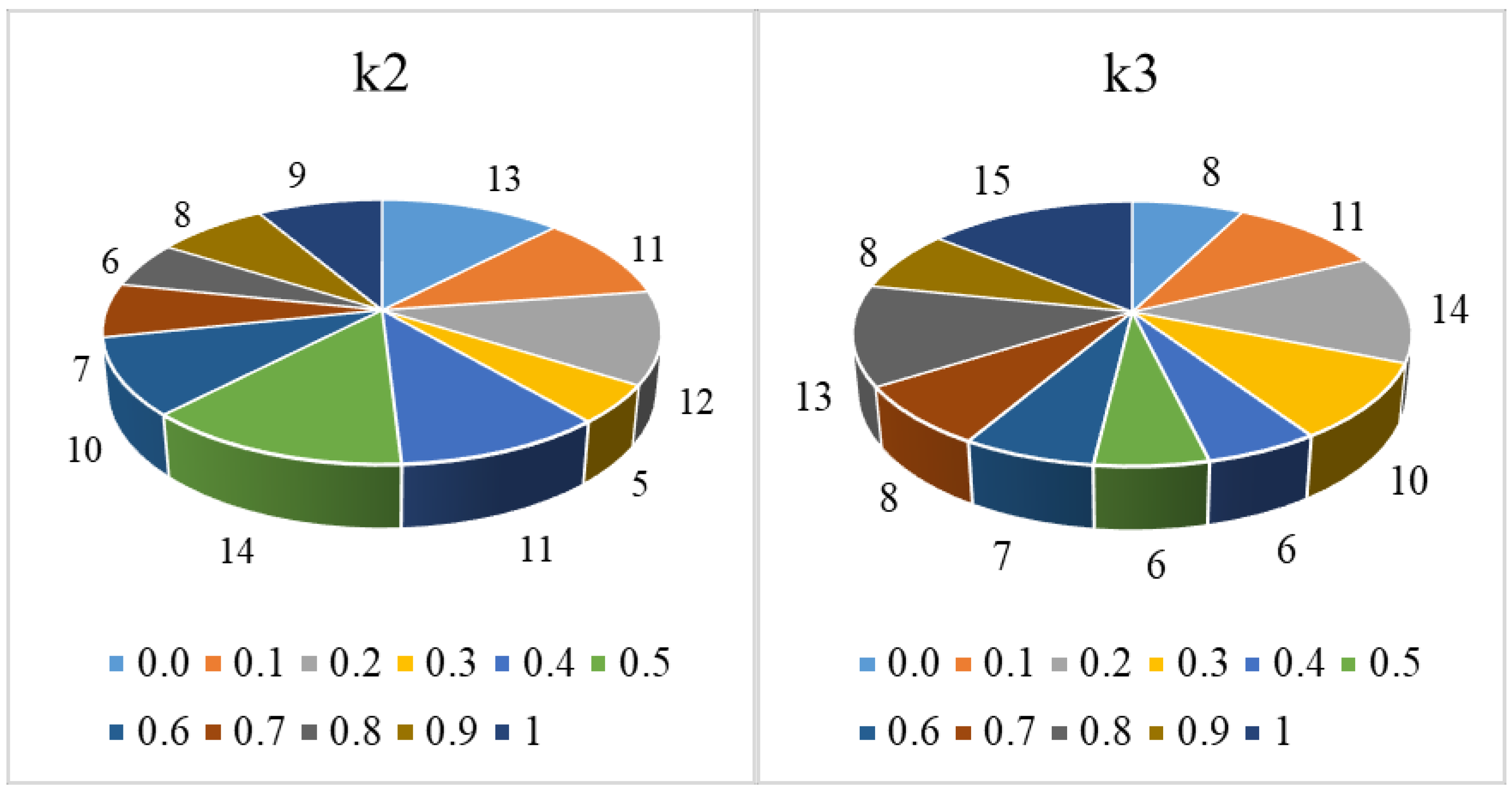
4.1. Setting the Parameters
4.2. Result Analysis
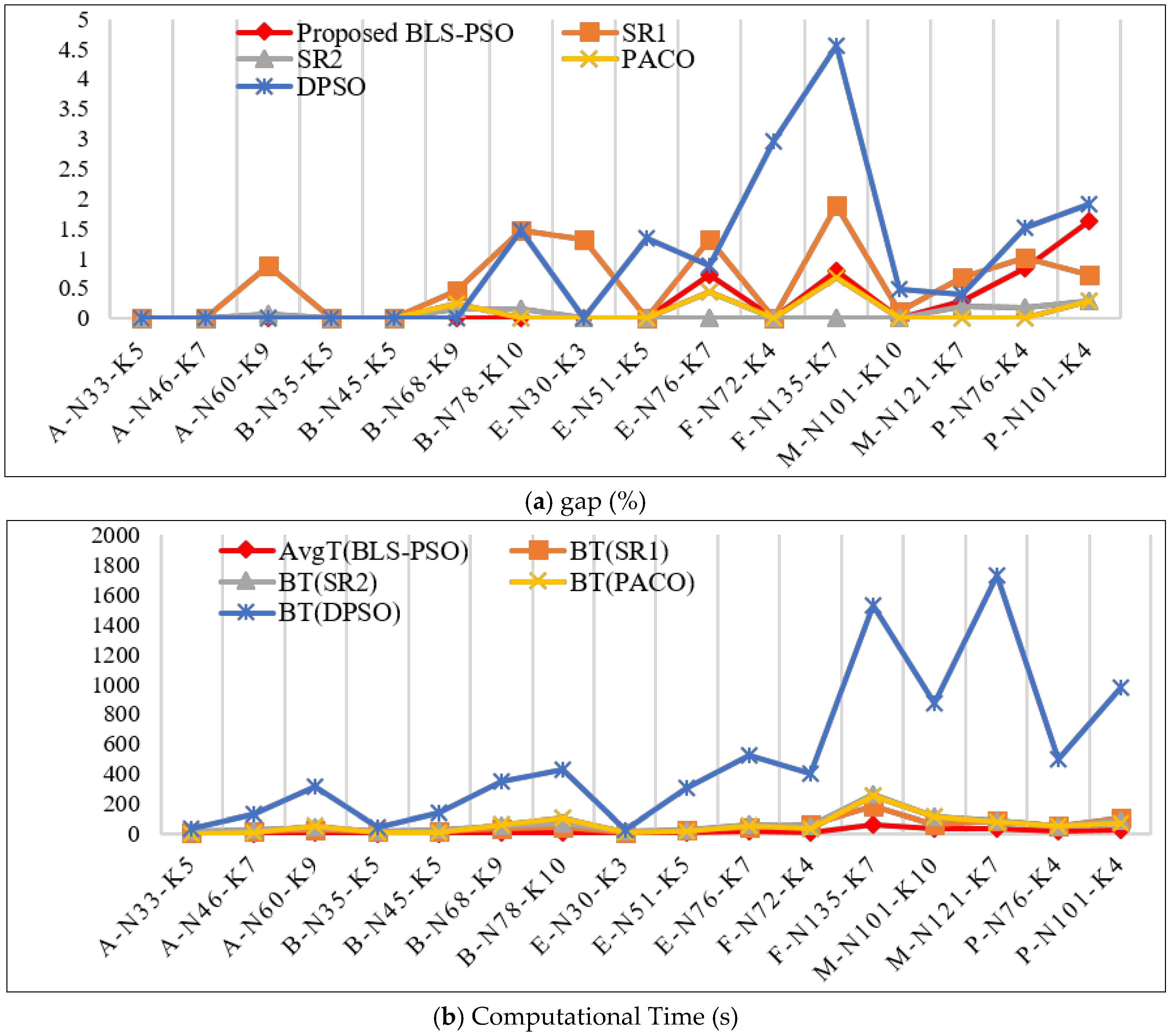
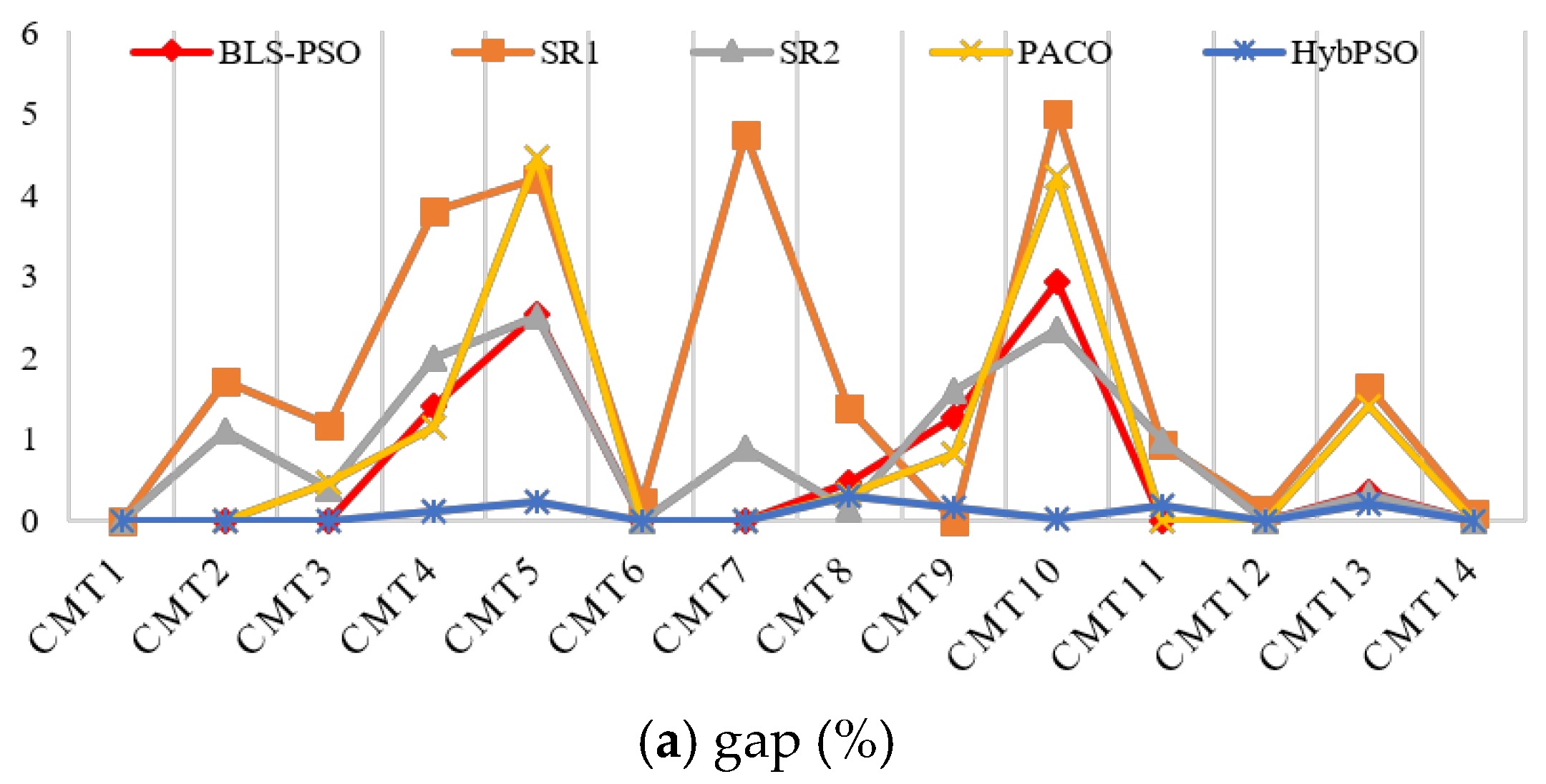
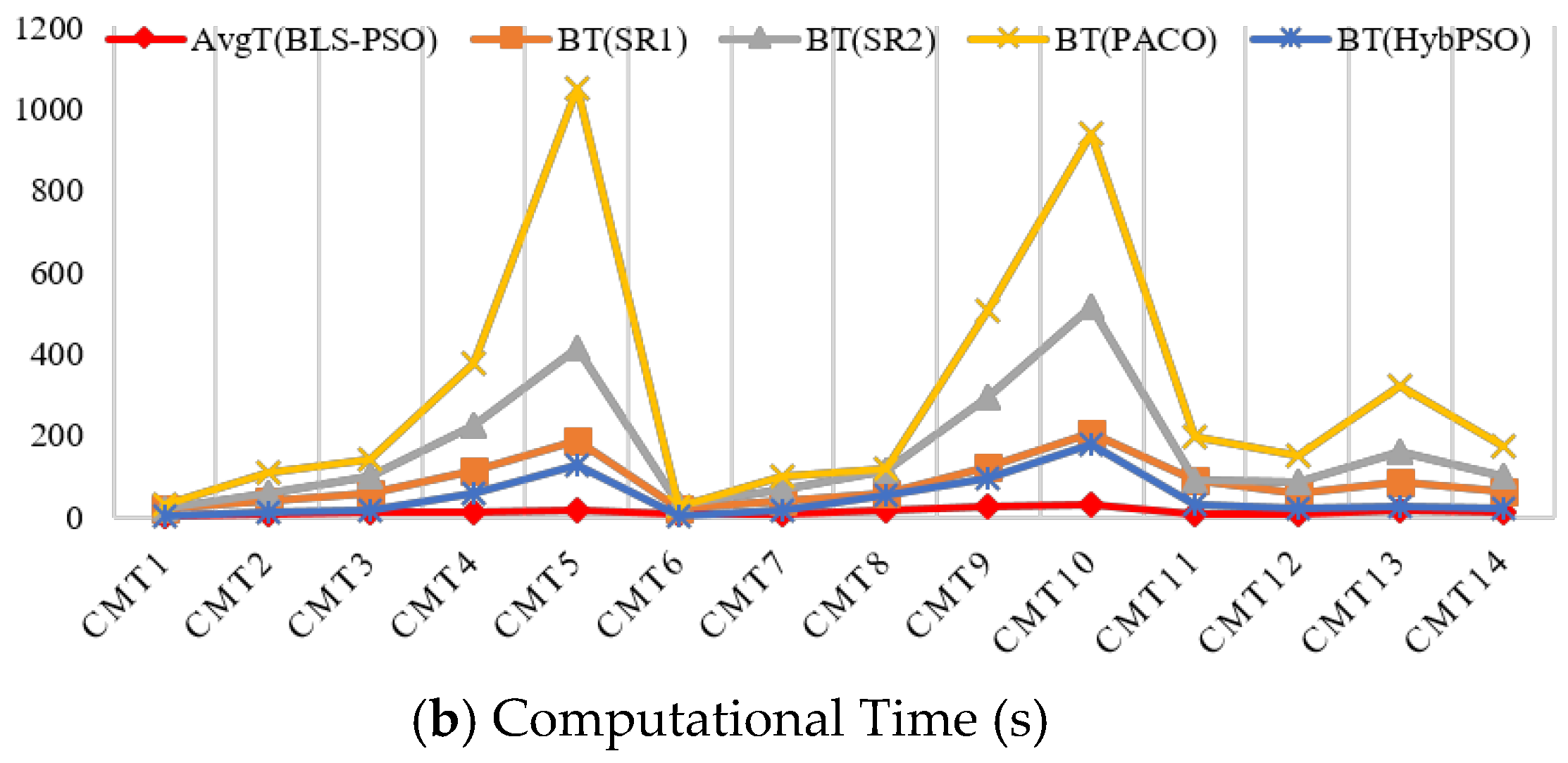
4.3. Comparative Performance of PSO-Based Approaches
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ćirović, G.; Pamučar, D.; Božanić, D. Green logistic vehicle routing problem: Routing light delivery vehicles in urban areas using a neuro-fuzzy model. Expert Syst. Appl. 2014, 41, 4245–4258. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Righini, G.; Salani, M. A branch-and-price approach to the vehicle routing problem with simultaneous distribution and collection. Transp. Sci. 2006, 40, 235–247. [Google Scholar] [CrossRef]
- Erdoğan, S.; Miller-Hooks, E. A green vehicle routing problem. Transp. Res. Part E 2012, 48, 100–114. [Google Scholar] [CrossRef]
- Lei, H.; Laporte, G.; Guo, B. The capacitated vehicle routing problem with stochastic demands and time windows. Comput. Oper. Res. 2011, 38, 1775–1783. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhao, Q.; Kaku, I.; Xu, Y. Development of a fuel consumption optimization model for the capacitated vehicle routing problem. Comput. Oper. Res. 2012, 39, 1419–1431. [Google Scholar] [CrossRef]
- Dantzig, G.B.; Ramser, J.H. The truck dispatching problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Lenstra, J.K.; Kan, A.H.G. Complexity of vehicle routing and scheduling problems. Networks 1981, 11, 221–227. [Google Scholar] [CrossRef]
- Christofides, N.; Mingozzi, A.; Toth, P. Exact algorithms for the vehicle routing problem, based on spanning tree and shortest path relaxations. Math. Program. 1981, 20, 255–282. [Google Scholar] [CrossRef]
- Clarke, G.; Wright, J.W. Scheduling of vehicles from a central depot to a number of delivery points. Oper. Res. 1964, 12, 568–581. [Google Scholar] [CrossRef]
- Gaskell, T.J. Bases for vehicle fleet scheduling. J. Oper. Res. Soc. 1967, 18, 281–295. [Google Scholar] [CrossRef]
- Mole, R.H.; Jameson, S.R. A sequential route-building algorithm employing a generalised savings criterion. J. Oper. Res. Soc. 1976, 27, 503–511. [Google Scholar] [CrossRef]
- Paessens, H. The savings algorithm for the vehicle routing problem. Eur. J. Oper. Res. 1988, 34, 336–344. [Google Scholar] [CrossRef]
- Fisher, M.L.; Jaikumar, R. A generalized assignment heuristic for vehicle routing. Networks 1981, 11, 109–124. [Google Scholar] [CrossRef]
- Gillett, B.E.; Miller, L.R. A heuristic algorithm for the vehicle-dispatch problem. Oper. Res. 1974, 22, 340–349. [Google Scholar] [CrossRef]
- Beasley, J.E. Route first—Cluster second methods for vehicle routing. Omega 1983, 11, 403–408. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Berger, J.; Barkaoui, M. A hybrid genetic algorithm for the capacitated vehicle routing problem. In Proceedings of the Conference on Genetic and Evolutionary Computation, Chicago, IL, USA, 12–16 July 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 646–656. [Google Scholar]
- Glover, F. Tabu search—Part I. ORSA J. Comput. 1989, 1, 190–206. [Google Scholar] [CrossRef]
- Glover, F. Tabu search—Part II. ORSA J. Comput. 1990, 2, 4–32. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. The granular tabu search and its application to the vehicle-routing problem. Informs J. Comput. 2003, 15, 333–346. [Google Scholar] [CrossRef]
- Kirkpatrick, S.C.; Gelatt, D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Lin, S.W.; Lee, Z.J.; Ying, K.C.; Lee, C.Y. Applying hybrid meta-heuristics for capacitated vehicle routing problem. Expert Syst. Appl. 2009, 36, 1505–1512. [Google Scholar] [CrossRef]
- Baker, B.M.; Ayechew, M.A. A genetic algorithm for the vehicle routing problem. Comput. Oper. Res. 2003, 30, 787–800. [Google Scholar] [CrossRef]
- Carwalo, T.; Thankappan, J.; Patil, V. Capacitated vehicle routing problem. In Proceedings of the 2nd International IEEE Conference on Communication Systems, Computing and IT Applications (CSCITA), Mumbai, India, 7–8 April 2017; pp. 17–21. [Google Scholar]
- Hertz, A.; Laporte, G.; Mittaz, M. A tabu search heuristic for the capacitated arc routing problem. Oper. Res. 2000, 48, 129–135. [Google Scholar] [CrossRef]
- Teymourian, E.; Kayvanfar, V.; Komaki, G.M.; Zandieh, M. Enhanced intelligent water drops and cuckoo search algorithms for solving the capacitated vehicle routing problem. Inf. Sci. 2016, 334, 354–378. [Google Scholar] [CrossRef]
- Yu, B.; Yang, Z.Z.; Yao, B. An improved ant colony optimization for vehicle routing problem. Eur. J. Oper. Res. 2009, 196, 171–176. [Google Scholar] [CrossRef]
- Blum, C.; Li, X. Swarm Intelligence. In Swarm Intelligence in Optimization; Blum, C., Merkle, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 43–85. [Google Scholar]
- Hu, X.; Eberhart, R.C.; Shi, Y. Swarm intelligence for permutation optimization: A case study of n-queens problem. In Proceedings of the IEEE Swarm Intelligence Symposium, Indianapolis, IN, USA, 26 April 2003; pp. 243–246. [Google Scholar]
- Marinakis, Y.; Marinaki, M. A hybrid genetic–Particle Swarm Optimization Algorithm for the vehicle routing problem. Expert Syst. Appl. 2010, 37, 1446–1455. [Google Scholar] [CrossRef]
- Chen, P.; Huang, H.K.; Dong, X.Y. Iterated variable neighborhood descent algorithm for the capacitated vehicle routing problem. Expert Syst. Appl. 2010, 37, 1620–1627. [Google Scholar] [CrossRef]
- Kytöjoki, J.; Nuortio, T.; Bräysy, O.; Gendreau, M. An efficient variable neighborhood search heuristic for very large scale vehicle routing problems. Comput. Oper. Res. 2007, 34, 2743–2757. [Google Scholar] [CrossRef]
- Mazzeo, S.; Loiseau, I. An ant colony algorithm for the capacitated vehicle routing. Electron. Notes Discret. Math. 2004, 18, 181–186. [Google Scholar] [CrossRef]
- Nazif, H.; Lee, L.S. Optimised crossover genetic algorithm for capacitated vehicle routing problem. Appl. Math. Model. 2012, 36, 2110–2117. [Google Scholar] [CrossRef]
- Ngueveu, S.U.; Prins, C.; Calvo, R.W. An effective memetic algorithm for the cumulative capacitated vehicle routing problem. Comput. Oper. Res. 2010, 37, 1877–1885. [Google Scholar] [CrossRef]
- Szeto, W.Y.; Wu, Y.; Ho, S.C. An artificial bee colony algorithm for the capacitated vehicle routing problem. Eur. J. Oper. Res. 2011, 215, 126–135. [Google Scholar] [CrossRef]
- Zhou, Y.; Luo, Q.; Xie, J.; Zheng, H. A hybrid bat algorithm with path relinking for the capacitated vehicle routing problem. In Metaheuristics and Optimization in Civil Engineering; Springer: Cham, Switzerland, 2016; Volume 7, pp. 255–276. [Google Scholar]
- Banks, A.; Vincent, J.; Anyakoha, C. A review of particle swarm optimization. Part I: Background and development. Nat. Comput. 2007, 6, 467–484. [Google Scholar] [CrossRef]
- Banks, A.; Vincent, J.; Anyakoha, C. A review of particle swarm optimization. Part II: Hybridisation, combinatorial, multicriteria and constrained optimization, and indicative applications. Nat. Comput. 2008, 7, 109–124. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Kennedy, J. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Network, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Chen, A.L.; Yang, G.K.; Wu, Z.M. Hybrid discrete particle swarm optimization algorithm for capacitated vehicle routing problem. J. Zhejiang Univ.-Sci. A 2006, 7, 607–614. [Google Scholar] [CrossRef]
- Yang, S.; Wang, M. A quantum particle swarm optimization. In Proceedings of the Congress on Evolutionary Computation, Portland, OR, USA, 19–23 June 2004; pp. 320–324. [Google Scholar]
- Kao, Y.; Chen, M. A Hybrid PSO Algorithm for the CVRP Problem. In Proceedings of the IJCCI (ECTA-FCTA), Paris, France, 24–26 October 2011; pp. 539–543. [Google Scholar]
- Ai, T.J.; Kachitvichyanukul, V. Particle swarm optimization and two solution representations for solving the capacitated vehicle routing problem. Comput. Ind. Eng. 2009, 56, 380–387. [Google Scholar] [CrossRef]
- Pongchairerks, C.; Kachitvichyanukul, V. A non-homogenous particle swarm optimization with multiple social structures. In Proceedings of the International Conference on Simulation and Modeling, Nakorn Pathom, Thailand, 17–19 January 2005; pp. 132–136. [Google Scholar]
- Ai, T.J.; Kachitvichyanukul, V. A particle swarm optimization for the capacitated vehicle routing problem. Int. J. Logist. SCM Syst. 2007, 2, 50–55. [Google Scholar]
- Marinakis, Y.; Marinaki, M.; Dounias, G. A hybrid particle swarm optimization algorithm for the vehicle routing problem. Eng. Appl. Artif. Intell. 2010, 23, 463–472. [Google Scholar] [CrossRef]
- Marinakis, Y.; Migdalad, A.; Pardalos, P.M. Multiple phase neighborhood Search–GRASP based on Lagrangean relaxation, random backtracking Lin–Kernighan and path relinking for the TSP. J. Comb. Optim. 2009, 17, 134–156. [Google Scholar] [CrossRef]
- Marinakis, Y.; Migdalad, A.; Pardalos, P.M. Expanding neighborhood GRASP for the traveling salesman problem. Comput. Optim. Appl. 2005, 32, 231–257. [Google Scholar] [CrossRef]
- Marinakis, Y.; Migdalad, A.; Pardalos, P.M. A Hybrid Genetic–GRASP Algorithm Using Lagrangean Relaxation for the Traveling Salesman Problem. J. Comb. Optim. 2005, 10, 311–326. [Google Scholar] [CrossRef]
- Glover, F.; Laguna, M.; Marti, R. Scatter Search and Path Relinking: Advances and Applications. In Handbook of Metaheuristics; Springer: New York, NY, USA, 2003; pp. 1–35. [Google Scholar]
- Kao, Y.; Chen, M.H.; Huang, Y.T. A hybrid algorithm based on ACO and PSO for capacitated vehicle routing problems. Math. Probl. Eng. 2012, 2012, 1–17. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.C. A modified particle swarm optimizer. In Proceedings of the IEEE International Conference on Evolutionary Computation, Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Wang, K.P.; Huang, L.; Zhou, C.G.; Pang, W. Particle swarm optimization for traveling salesman problem. In Proceedings of the IEEE International Conference on Machine Learning and Cybernetics, Xi’an, China, 5 November 2003; pp. 1583–1585. [Google Scholar]
- Augerat, P.; Belenguer, J.; Benavent, E.; Corberán, A.; Naddef, D.; Rinaldi, G. Computational Results with a Branch and Cut Code for the Capacitated Vehicle Routing Problem; Technical report 949-M; Université Joseph Fourier: Grenoble, France, 1995. [Google Scholar]
- Christofides, N.; Mingozzi, A.; Toth, P. An algorithm for the vehicle-dispatching problem. Oper. Res. Q. 1969, 20, 309–318. [Google Scholar] [CrossRef]
- Christofides, N.; Mingozzi, A.; Toth, P. The Vehicle Routing Problem. In Combinatorial Optimization; Wiley Interscience: Hoboken, NJ, USA, 1979; pp. 315–338. [Google Scholar]
- Akhand, M.A.H.; Akter, S.; Rashid, M.A.; Yaakob, S.B. Velocity Tentative PSO: An Optimal Velocity Implementation based Particle Swarm Optimization to Solve Traveling Salesman Problem. Prod. Plan. Control 2015, 42, 221–232. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | Total number of nodes |
| m | Total number of required vehicles |
| Cost to visit node ck from node cj | |
| Service time required when a vehicle visits node i (for the depot, ) | |
| Q | Maximum capacity of a vehicle |
| TT | Maximum distance of a vehicle can travel to |
| di | Demand of a customer to be served by a vehicle |
| Z | Customer set served by a vehicle; |Z| is the number of customers served by a vehicle |
| Binary decision variable set to 1 if vehicle v serves node k after serving node j, or 0 otherwise |
| Hub ID | Customer IDs | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| IDs | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| Demands | 0 | 17 | 8 | 16 | 28 | 13 | 8 | 23 | 7 | 6 | 15 |
| PSParticle | T | k2 | k3 |
|---|---|---|---|
| {|n/10|, |n/8|, |n/6|, |n/4|, |n/3|, |n/2|, |n|} | {10, 20, 50, 60, 80, 100} | {between 0 and 1 (with 0.1 interval)} | {between 0 and 1 (with 0.1 interval)} |
| Problems | BKS | CostBLS-PSO | gap | AvgT | k2 | k3 |
|---|---|---|---|---|---|---|
| A-n32-k5 | 784 | 784 | 0.00 | 0.15 | 0.1 | 0.1 |
| A-n33-k5 | 661 | 661 | 0.00 | 0.15 | 0.4 | 0.5 |
| A-n33-k6 | 742 | 742 | 0.00 | 0.43 | 0.4 | 0.0 |
| A-n34-k5 | 778 | 778 | 0.00 | 0.8 | 0.5 | 0.8 |
| A-n36-k5 | 799 | 799 | 0.00 | 0.76 | 0.0 | 0.8 |
| A-n37-k5 | 669 | 669 | 0.00 | 0.92 | 0.8 | 1.0 |
| A-n37-k6 | 949 | 949 | 0.00 | 0.64 | 0.5 | 0.2 |
| A-n38-k5 | 730 | 730 | 0.00 | 0.69 | 1.0 | 0.8 |
| A-n39-k5 | 822 | 822 | 0.00 | 1.07 | 0.5 | 0.3 |
| A-n39-k6 | 831 | 831 | 0.00 | 1.15 | 0.4 | 0.7 |
| A-n44-k6 | 937 | 937 | 0.00 | 1.03 | 0.3 | 0.0 |
| A-n45-k6 | 944 | 944 | 0.00 | 1.76 | 0.0 | 0.2 |
| A-n45-k7 | 1146 | 1146 | 0.00 | 1.31 | 0.5 | 0.0 |
| A-n46-k7 | 914 | 914 | 0.00 | 1.29 | 0.6 | 0.3 |
| A-n48-k7 | 1073 | 1073 | 0.00 | 1.45 | 0.9 | 0.1 |
| A-n53-k7 | 1010 | 1010 | 0.00 | 2.54 | 0.9 | 1.0 |
| A-n54-k7 | 1167 | 1167 | 0.00 | 7.61 | 0.2 | 0.5 |
| A-n55-k9 | 1073 | 1073 | 0.00 | 8.47 | 0.5 | 0.4 |
| A-n60-k9 | 1354 | 1354 | 0.00 | 8.78 | 0.6 | 0.2 |
| A-n61-k9 | 1034 | 1034 | 0.00 | 7.98 | 0.7 | 1.0 |
| A-n62-k8 | 1288 | 1296 | 0.62 | 9.53 | 0.7 | 0.4 |
| A-n63-k9 | 1616 | 1616 | 0.00 | 9.22 | 0.9 | 0.3 |
| A-n63-k10 | 1314 | 1314 | 0.00 | 10.14 | 0.8 | 1.0 |
| A-n64-k9 | 1401 | 1415 | 1.00 | 18.86 | 0.5 | 0.6 |
| A-n65-k9 | 1174 | 1174 | 0.00 | 16.5 | 0.2 | 0.8 |
| A-n69-k9 | 1159 | 1159 | 0.00 | 18.41 | 0.6 | 0.6 |
| A-n80-k10 | 1763 | 1766 | 0.17 | 16.75 | 0.2 | 1.0 |
| Average | 0.07 | 5.5 | -- | -- | ||
| Problems | BKS | CostBLS-PSO | gap | AvgT | k2 | k3 |
|---|---|---|---|---|---|---|
| B-n31-k5 | 672 | 672 | 0.00 | 2.07 | 0.5 | 0.5 |
| B-n34-k5 | 788 | 788 | 0.00 | 2.42 | 0.1 | 0.9 |
| B-n35-k5 | 955 | 955 | 0.00 | 1.12 | 0.6 | 0.8 |
| B-n38-k6 | 805 | 805 | 0.00 | 3.01 | 0.8 | 0.9 |
| B-n39-k5 | 549 | 549 | 0.00 | 3.59 | 0.0 | 0.3 |
| B-n41-k6 | 829 | 829 | 0.00 | 3.93 | 0.2 | 0.3 |
| B-n43-k6 | 742 | 742 | 0.00 | 2.55 | 0.7 | 0.1 |
| B-n44-k7 | 909 | 909 | 0.00 | 3.16 | 0.0 | 0.3 |
| B-n45-k5 | 751 | 751 | 0.00 | 2.04 | 0.8 | 0.2 |
| B-n45-k6 | 672 | 672 | 0.00 | 4.95 | 0.5 | 0.5 |
| B-n50-k7 | 741 | 741 | 0.00 | 5.45 | 0.3 | 0.2 |
| B-n50-k8 | 1312 | 1312 | 0.00 | 5.53 | 0.0 | 0.0 |
| B-n51-k7 | 1032 | 1032 | 0.00 | 5.39 | 0.2 | 0.0 |
| B-n52-k7 | 747 | 747 | 0.00 | 6.18 | 0.1 | 0.6 |
| B-n56-k7 | 707 | 707 | 0.00 | 7.31 | 0.2 | 0.2 |
| B-n57-k7 | 1153 | 1153 | 0.00 | 8.12 | 0.0 | 0.8 |
| B-n57-k9 | 1598 | 1598 | 0.00 | 8.56 | 0.4 | 1.0 |
| B-n63-k10 | 1496 | 1496 | 0.00 | 9.13 | 0.0 | 0.6 |
| B-n64-k9 | 861 | 884 | 2.67 | 16.75 | 1.0 | 0.8 |
| B-n66-k9 | 1316 | 1322 | 0.46 | 15.52 | 1.0 | 0.9 |
| B-n67-k10 | 1032 | 1032 | 0.00 | 8.24 | 0.1 | 1.0 |
| B-n68-k9 | 1272 | 1272 | 0.00 | 6.19 | 0.0 | 0.5 |
| B-n78-k10 | 1221 | 1221 | 0.00 | 9.71 | 0.5 | 0.2 |
| Average | 0.14 | 6.13 | -- | -- | ||
| Problems | BKS | CostBLS-PSO | gap | AvgT | k2 | k3 |
|---|---|---|---|---|---|---|
| E-n22-k4 | 375 | 375 | 0.00 | 0.21 | 0.3 | 0.1 |
| E-n23-k3 | 569 | 569 | 0.00 | 0.2 | 0.1 | 0.6 |
| E-n30-k3 | 534 | 534 | 0.00 | 0.3 | 0.2 | 0.2 |
| E-n33-k4 | 835 | 835 | 0.00 | 1.77 | 0.4 | 0.3 |
| E-n51-k5 | 521 | 521 | 0.00 | 2.81 | 0.1 | 0.8 |
| E-n76-k7 | 682 | 687 | 0.73 | 13.55 | 0.2 | 0.9 |
| E-n76-k8 | 735 | 735 | 0.00 | 27.36 | 0.2 | 0.8 |
| E-n76-k10 | 830 | 830 | 0.00 | 18.62 | 0.4 | 0.6 |
| E-n76-k14 | 1021 | 1021 | 0.00 | 14.69 | 0.2 | 0.3 |
| E-n101-k8 | 815 | 815 | 0.00 | 21.27 | 0.9 | 0.9 |
| E-n101-k14 | 1067 | 1095 | 2.62 | 25.81 | 0.2 | 0.2 |
| Average | 0.31 | 11.51 | -- | -- | ||
| Problems | BKS | CostBLS-PSO | gap | AvgT | k2 | k3 |
|---|---|---|---|---|---|---|
| F-n45-k4 | 724 | 724 | 0.00 | 9.2 | 0.7 | 0.7 |
| F-n72-k4 | 237 | 237 | 0.00 | 7.26 | 0.9 | 0.2 |
| F-n135-k7 | 1162 | 1171 | 0.78 | 60.32 | 0.4 | 0.7 |
| Average | 0.26 | 25.59 | -- | -- | ||
| Problems | BKS | CostBLS-PSO | gap | AvgT | k2 | k3 |
|---|---|---|---|---|---|---|
| M-n101-k10 | 820 | 820 | 0.00 | 28.81 | 0.7 | 1.0 |
| M-n121-k7 | 1034 | 1034 | 0.00 | 33.33 | 0.6 | 0.0 |
| M-n151-k12 | 1015 | 1065 | 4.93 | 83.81 | 0.7 | 0.4 |
| M-n200-k16 | 1274 | 1335 | 4.79 | 90.35 | 0.5 | 1.0 |
| M-n200-k17 | 1275 | 1371 | 7.53 | 107.14 | 0.5 | 1.0 |
| Average | 3.45 | 68.69 | -- | -- | ||
| Problems | BKS | CostBLS-PSO | gap | AvgT | k2 | k3 |
|---|---|---|---|---|---|---|
| P-n16-k8 | 450 | 450 | 0.00 | 0.11 | 0.1 | 0.9 |
| P-n19-k2 | 212 | 212 | 0.00 | 0.1 | 0.9 | 0.0 |
| P-n20-k2 | 216 | 216 | 0.00 | 0.35 | 0.1 | 0.1 |
| P-n21-k2 | 211 | 211 | 0.00 | 0.32 | 0.1 | 0.1 |
| P-n22-k2 | 216 | 216 | 0.00 | 0.71 | 0.1 | 0.7 |
| P-n22-k8 | 603 | 603 | 0.00 | 0.83 | 0.4 | 0.2 |
| P-n23-k8 | 529 | 529 | 0.00 | 1.02 | 0.5 | 0.8 |
| P-n40-k5 | 458 | 458 | 0.00 | 1.33 | 0.5 | 0.2 |
| P-n45-k5 | 510 | 510 | 0.00 | 1.45 | 1.0 | 0.3 |
| P-n50-k7 | 554 | 554 | 0.00 | 1.48 | 0.7 | 0.9 |
| P-n50-k8 | 631 | 631 | 0.00 | 1.05 | 1.0 | 0.1 |
| P-n50-k10 | 696 | 696 | 0.00 | 2.23 | 0.3 | 0.5 |
| P-n51-k10 | 741 | 741 | 0.00 | 3.38 | 0.3 | 0.6 |
| P-n55-k7 | 568 | 568 | 0.00 | 4.32 | 1.0 | 0.1 |
| P-n55-k10 | 694 | 694 | 0.00 | 4.94 | 0.6 | 1.0 |
| P-n55-k15 | 989 | 989 | 0.00 | 4.29 | 1.0 | 0.3 |
| P-n60-k10 | 744 | 744 | 0.00 | 5.83 | 0.8 | 0.1 |
| P-n60-k15 | 968 | 968 | 0.00 | 5.37 | 0.0 | 0.7 |
| P-n65-k10 | 792 | 792 | 0.00 | 6.44 | 0.0 | 0.8 |
| P-n70-k10 | 827 | 833 | 0.73 | 9.24 | 0.8 | 1.0 |
| P-n76-k4 | 593 | 598 | 0.84 | 16.11 | 0.4 | 1.0 |
| P-n76-k5 | 627 | 636 | 1.44 | 15.85 | 0.6 | 0.4 |
| P-n101-k4 | 681 | 692 | 1.62 | 20.17 | 0.5 | 0.7 |
| Average | 0.2 | 4.72 | -- | -- | ||
| Problems | BKS | CostBLS-PSO | gap | AvgT | k2 | k3 |
|---|---|---|---|---|---|---|
| CMT1 | 524.61 | 524.61 | 0.00 | 2.19 | 0.6 | 0.2 |
| CMT2 | 835.26 | 835.26 | 0.00 | 8.44 | 0.4 | 0.8 |
| CMT3 | 826.14 | 826.14 | 0.00 | 10.58 | 0.6 | 1.0 |
| CMT4 | 1028.42 | 1042.8 | 1.4 | 11.82 | 0.9 | 0.0 |
| CMT5 | 1291.29 | 1324.01 | 2.53 | 16.37 | 0.9 | 0.2 |
| CMT6 | 555.43 | 555.43 | 0.00 | 9.11 | 0.4 | 0.4 |
| CMT7 | 909.68 | 909.68 | 0.00 | 7.23 | 0.0 | 0.9 |
| CMT8 | 865.95 | 870.03 | 0.47 | 19.41 | 1.0 | 0.1 |
| CMT9 | 1162.55 | 1177.14 | 1.25 | 25.21 | 0.0 | 1.0 |
| CMT10 | 1395.85 | 1436.84 | 2.93 | 31.04 | 0.6 | 0.7 |
| CMT11 | 1042.12 | 1042.12 | 0.00 | 8.58 | 1.0 | 0.8 |
| CMT12 | 819.56 | 819.56 | 0.00 | 10.08 | 0.1 | 0.1 |
| CMT13 | 1541.14 | 1546.36 | 0.34 | 15.54 | 0.2 | 0.7 |
| CMT14 | 866.37 | 866.37 | 0.00 | 11.07 | 0.0 | 0.4 |
| Average | 0.64 | 13.33 | -- | -- | ||
| SR1 | SR2 | PACO | DPSO | BLS-PSO | |||
|---|---|---|---|---|---|---|---|
| Problem | BKS | Cost | Cost | Cost | Cost | Cost | AvgCost |
| BT | BT | BT | BT | AvgT | |||
| (gap) | (gap) | (gap) | (gap) | (gap) | (SD) | ||
| A-n33-k5 | 661 | 661 | 661 | 661 | 661 | 661 | 661 |
| 11 | 13 | 0.87 | 32.3 | 0.15 | |||
| (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | ||
| A-n46-k7 | 914 | 914 | 914 | 914 | 914 | 914 | 914 |
| 18 | 23 | 6.02 | 128.9 | 1.29 | |||
| (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | ||
| A-n60-k9 | 1354 | 1366 a | 1355 a | 1354 | 1354 | 1354 | 1362 |
| 28 | 40 | 52.88 | 308.8 | 8.78 | |||
| (0.89) | (0.07) | (0.00) | (0.00) | (0.00) | (0.59) | ||
| B-n35-k5 | 955 | 955 | 955 | 955 | 955 | 955 | 955 |
| 12 | 14 | 2.65 | 37.6 | 1.12 | |||
| (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | ||
| B-n45-k5 | 751 | 751 | 751 | 751 | 751 | 751 | 757 |
| 17 | 20 | 5.85 | 134.2 | 2.04 | |||
| (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | (0.8) | ||
| B-n68-k9 | 1272 | 1278 a | 1274 a | 1275 a | 1272 | 1272 | 1289 |
| 33 | 50 | 62.97 | 344.3 | 6.19 | |||
| (0.47) | (0.16) | (0.24) | (0.00) | (0.00) | (1.34) | ||
| B-n78-k10 | 1221 | 1239 a | 1223 a | 1221 | 1239 a | 1221 | 1243 |
| 41 | 64 | 98.78 | 429.4 | 9.71 | |||
| (1.47) | (0.16) | (0.00) | (1.47) | (0.00) | (1.8) | ||
| E-n30-k3 | 534 | 541 a | 534 | 534 | 534 | 534 | 534 |
| 11 | 16 | 4.38 | 28.4 | 0.3 | |||
| (1.31) | (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | ||
| E-n51-k5 | 521 | 521 | 521 | 521 | 528 a | 521 | 531 |
| 21 | 22 | 19.46 | 300.5 | 2.81 | |||
| (0.00) | (0.00) | (0.00) | (1.34) | (0.00) | (1.92) | ||
| E-n76-k7 | 682 | 691 a | 682 | 685 | 688 a | 687 | 696 |
| 38 | 60 | 46.85 | 526.5 | 13.55 | |||
| (1.32) | (0.00) | (0.44) | (0.88) | (0.73) | (2.05) | ||
| F-n72-k4 | 237 | 237 | 237 | 237 | 244 a | 237 | 248 |
| 58 | 53 | 30.64 | 398.3 | 7.26 | |||
| (0.00) | (0.00) | (0.00) | (2.95) | (0.00) | (4.64) | ||
| F-n135-k7 | 1162 | 1184 a | 1162 | 1170 | 1215 a | 1171 | 1192 |
| 178 | 258 | 248.77 | 1526.3 | 60.32 | |||
| (1.89) | (0.00) | (0.69) | (4.56) | (0.78) | (2.58) | ||
| M-n101-k10 | 820 | 821 a | 820 | 820 | 824 a | 820 | 827 |
| 60 | 114 | 113.28 | 874.2 | 28.81 | |||
| (0.12) | (0.00) | (0.00) | (0.49) | (0.00) | (0.85) | ||
| M-n121-k7 | 1034 | 1041 a | 1036 a | 1034 | 1038 a | 1034 | 1040 |
| 88 | 89 | 80.62 | 1733.5 | 33.33 | |||
| (0.68) | (0.19) | (0.00) | (0.39) | (0.00) | (0.58) | ||
| P-n76-k4 | 593 | 599 a | 594 | 593 | 602 a | 598 | 617 |
| 51 | 48 | 53.48 | 496.3 | 16.11 | |||
| (1.01) | (0.17) | (0.00) | (1.52) | (0.84) | (4.05) | ||
| P-n101-k4 | 681 | 686 | 683 | 683 | 694 a | 692 | 699 |
| 99 | 86 | 64.92 | 977.5 | 20.17 | |||
| (0.73) | (0.29) | (0.29) | (1.91) | (1.62) | (2.64) | ||
| Average | -- | -- | -- | -- | -- | -- | |
| 47.81 | 60.63 | 55.78 | 517.3125 | 13.25 | |||
| (0.62) | (0.066) | (0.1) | (0.97) | (0.25) | (1.49) | ||
| SR1 | SR2 | PACO | HybPSO | BLS-PSO | |||
|---|---|---|---|---|---|---|---|
| Problem | BKS | Cost | Cost | Cost | Cost | Cost | AvgCost |
| BT | BT | BT | BT | AvgT | |||
| (gap) | (gap) | (gap) | (gap) | (gap) | (SD) | ||
| CMT1 | 524.61 | 524.61 | 524.61 | 524.61 | 524.61 | 524.61 | 524.61 |
| 21 | 24 | 32.3 | 3 | 2.19 | |||
| (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | ||
| CMT2 | 835.26 | 849.58 a | 844.42 a | 835.26 | 835.26 | 835.26 | 840.39 |
| 39 | 57 | 108 | 13 | 8.44 | |||
| (1.71) | (1.1) | (0.00) | (0.00) | (0.00) | (0.61) | ||
| CMT3 | 826.14 | 835.8 a | 829.4 a | 829.92 a | 826.14 | 826.14 | 836.44 |
| 61 | 101 | 142 | 19 | 10.58 | |||
| (1.17) | (0.39) | (0.46) | (0.00) | (0.00) | (1.25) | ||
| CMT4 | 1028.42 | 1067.57 a | 1048.89 a | 1040.23 | 1029.54 | 1042.8 | 1059.13 |
| 113 | 223 | 378 | 61 | 11.82 | |||
| (3.81) | (1.99) | (1.15) | (0.11) | (1.4) | (2.99) | ||
| CMT5 | 1291.29 | 1345.84 a | 1323.89 | 1348.73 a | 1294.13 | 1324.01 | 1348.27 |
| 188 | 413 | 1049 | 129 | 16.37 | |||
| (4.21) | (2.51) | (4.44) | (0.22) | (2.53) | (4.41) | ||
| CMT6 | 555.43 | 556.68 a | 555.43 | 555.43 | 555.43 | 555.43 | 555.43 |
| 21 | 30 | 28 | 3 | 9.11 | |||
| (0.23) | (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | ||
| CMT7 | 909.68 | 952.77 a | 917.68 a | 909.68 | 909.68 | 909.68 | 917.94 |
| 42 | 69 | 99 | 17 | 7.23 | |||
| (4.74) | (0.88) | (0.00) | (0.00) | (0.00) | (0.91) | ||
| CMT8 | 865.95 | 877.84 a | 867.01 | 868.61 | 868.45 | 870.03 | 884.2 |
| 61 | 115 | 118 | 53 | 19.41 | |||
| (1.37) | (0.12) | (0.31) | (0.29) | (0.47) | (2.11) | ||
| CMT9 | 1162.55 | Inf a | 1181.14 a | 1171.94 | 1164.35 | 1177.14 | 1190.07 |
| 125 | 295 | 506 | 94 | 25.21 | |||
| (Inf) | (1.6) | (0.81) | (0.16) | (1.25) | (2.37) | ||
| CMT10 | 1395.85 | 1465.66 a | 1428.46 | 1454.81 a | 1396.18 | 1436.84 | 1452.23 |
| 208 | 517 | 939 | 181 | 31.04 | |||
| (5.00) | (2.34) | (4.22) | (0.024) | (2.93) | (4.04) | ||
| CMT11 | 1042.12 | 1051.87 a | 1052.34 a | 1042.12 | 1044.03 a | 1042.12 | 1056.88 |
| 89 | 93 | 197 | 32 | 8.58 | |||
| (0.94) | (0.98) | (0.00) | (0.18) | (0.00) | (1.42) | ||
| CMT12 | 819.56 | 820.62 a | 819.56 | 819.56 | 819.56 | 819.56 | 819.56 |
| 60 | 88 | 149 | 23 | 10.08 | |||
| (0.13) | (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | ||
| CMT13 | 1541.14 | 1566.32 a | 1546.2 | 1562.64 a | 1544.18 | 1546.36 | 1558.35 |
| 86 | 160 | 321 | 25 | 15.54 | |||
| (1.63) | (0.33) | (1.4) | (0.197) | (0.34) | (1.12) | ||
| CMT14 | 866.37 | 867.13 a | 866.37 | 866.37 | 866.37 | 866.37 | 866.37 |
| 64 | 99 | 173 | 22 | 11.07 | |||
| (0.09) | (0.00) | (0.00) | (0.00) | (0.00) | (0.00) | ||
| Average | -- | -- | -- | -- | -- | -- | |
| 84.1 | 163.1 | 302.58 | 48.13 | 13.33 | |||
| (1.788) | (0.874) | (0.913) | (0.084) | (0.64) | (1.52) | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, A.K.M.F.; Sun, J.U. Bilayer Local Search Enhanced Particle Swarm Optimization for the Capacitated Vehicle Routing Problem. Algorithms 2018, 11, 31. https://doi.org/10.3390/a11030031
Ahmed AKMF, Sun JU. Bilayer Local Search Enhanced Particle Swarm Optimization for the Capacitated Vehicle Routing Problem. Algorithms. 2018; 11(3):31. https://doi.org/10.3390/a11030031
Chicago/Turabian StyleAhmed, A. K. M. Foysal, and Ji Ung Sun. 2018. "Bilayer Local Search Enhanced Particle Swarm Optimization for the Capacitated Vehicle Routing Problem" Algorithms 11, no. 3: 31. https://doi.org/10.3390/a11030031
APA StyleAhmed, A. K. M. F., & Sun, J. U. (2018). Bilayer Local Search Enhanced Particle Swarm Optimization for the Capacitated Vehicle Routing Problem. Algorithms, 11(3), 31. https://doi.org/10.3390/a11030031