1. Introduction
Advanced optimization methods are used in engineering design to obtain the best functional performance and/or minimum production cost of a complex product or system in the increasingly competitive international market. Nature-inspired global optimization algorithms with superior search efficiency and robustness have been continuously introduced and improved to solve various complex, nonlinear optimization problems, which most traditional gradient-based optimization methods are incapable to deal with. Moreover, these nature-inspired global optimization (GO) algorithms become more useful when the objective function of the problem of interest is in implicit, black-box form and/or its derivative information of is unavailable, unreliable, or expensive to obtain. Development of the nature-inspired global optimization algorithm dated back to the introductions of the Genetic Algorithm (GA) based on Darwin’s principle of biological systems by Holland et al. [
1] Since then, Ant Colony Optimization (ACO) [
2], Simulated Annealing (SA) [
3], and Particle Swarm Optimization (PSO) [
4], as the most recognized nature-inspired global optimization algorithms have been introduced. Due to their general applicability, ease of implantation, and relatively fast convergence, GA, PSO, ABC and SA have attracted much attention in the past, and have been applied successfully for a wide range of global optimization applications. For instance, Brenna et al. [
5] employed GA optimizer to carry out multi-objective optimization for train schedules with minimum energy consumption and travel time; Zhao et al. [
6] proposed an improved ant colony optimization (ACO) method for the route planning of the omnidirectional mobile vehicle; and Herish et al. [
4,
7] applied PSO in multi-objective optimization for reliability-redundancy assignments in design.
Over the years, significant efforts have been devoted to the further developments of various global optimization methods of both deterministic and stochastic types. The deterministic approach solves an optimization problem through a predetermined sequence of searches and search points, converging to the same or very close global optimum. Direct search [
8], branch and bound [
9], clustering [
10], and tunneling methods [
11] are typical examples of this approach. Stochastic methods, including nature-inspired techniques, are based on randomly sampled search points. Therefore, their different runs may result in different optimization results due to the random nature of the search steps. These stochastic search algorithms have the capability to identify the global optimum efficiently for many optimization problems, simply using the evaluated values of the objective function without the need of its gradient information.
With the advance of computation hardware and software, computational intensive, numerical analysis and simulation tools, such as Finite Element Analysis (FEA) and Computational Fluid Dynamics (CFD), became commonly used means for evaluating the performance of a new design with many design parameters. Global optimization can be used to search through the design space of these implicit and multimodal objective functions to identify the optimal design solution in principle. However, these types of computationally expensive, black-box function optimization problems require extensive computation during each evaluation of its objective function. Conventional nature-inspired optimization algorithms, such as GA and SA, which require very large number of objective function evaluations with lengthy computation time, particularly for high-dimensional problems with many design variables, become impractical and infeasible to use.
To address this issue, a number of recently introduced nature-inspired optimization methods, such as the Artificial Bee Colony (ABC) [
12], Firefly Algorithm (FFA) [
13], Cuckoo Search (CS) [
14,
15], Bat Algorithm (BA) [
16], Flower Pollination Algorithm (FPA) [
17], and Grey Wolf Optimizer (GWO) [
18], have been introduced with improved ability to deal with complex and high-dimensional global optimization problems [
19].
This study tests and compares the performance of the aforementioned six nature-inspired GO search methods, BA, CSA, FFA, FPA, ABC and GWO, in terms of their capability of locating the true global optimum, search efficiency, and robustness in dealing with high-dimensional and computationally expensive black-box GO problems. These advanced GO methods are closely examined using a variety of test problems, ranging from benchmark test functions to real-life design optimization of complex mechanical systems. The paper begins with an overview on these relatively new algorithms, followed by a discussion on the evaluation criteria. The convergence process and results are discussed comprehensively to rank their search efficiency and robustness.
3. Nature-Inspired Global Optimization Methods
Nature-inspired Global Optimization approaches are a class of population-based methods commonly used for solving many practical global optimization problems including: GA, PSO, SA and ACO. However, these traditional GO algorithms need an enormous number of function evaluations during the search process in order to recognize the solution, and the number of search evaluations dramatically increases when the optimization problem becomes a high-dimensional problem. Hence, new effective and capable GO search methods become necessary. In recent years, a number of new search methods have been presented including the Artificial Bee Colony (ABC), the Firefly Algorithm (FFA), the Cuckoo Search (CS), the Bat Algorithm (BA), the Flower Pollination Algorithm (FPA), and the Grey Wolf Optimizer (GWO). In this section, the selected nature-inspired global optimization methods are discussed and explored in more detail. The pros and cons, as well as the applications of the six methods are also highlighted in this section. The methods have been chosen based on:
They have been introduced in the last decade.
They are frequently and widely used in solving many engineering globe optimization problems.
They share many similarities in general. For instance, all these methods begin with a randomly population group and operate a fitness value to evaluate this population. They all update the population and randomly search for the optimum. They use a sharing information mechanism wherein the evolution only looks for the best solution.
They have the potential to solve high-dimensional complex design problems especially when the number of iterations are limited.
3.1. Artificial Bee Colony Method
The Artificial Bee Colony (ABC) method, presented by Dervis Karaboga in 2005 [
19], was inspired by the search behaviour of bee colonies. Honeybees use several mechanisms, such as a waggle dance, to locate food sources. The waggle dance technique is used by scout bees to share information about the source of food. Bees can quickly and precisely modify their search pattern and search space in accordance to the updated information received from other bees. In the ABC method, artificial bees are classified into three different groups: employed bees, onlooker bees, and lastly, scout bees. Each of these groups is assigned different tasks in the ABC procedure. The employed bee’s task is to visit and collect information about a source of nectar and then share it with other bees in the hive. In the ABC algorithm, the number of employed bees and the number of food sources are equal since each employed bee is linked with only one source of nectar. The onlooker bees receive the data regarding the sources of nectar from the employed bees, and then the onlooker bees select one of the sources and start to transfer the food to the hive. The scout bees fly in random directions and have the responsibility of finding new sources of nectar. In the ABC method, the possible solution corresponds to the nectar source location in which the fitness of the solution mainly depends on the related nectar amount. Furthermore, the total number of best obtained solutions is also identical to the number of employed bees or equivalent onlooker bees.
In the ABC method, a number of parameters including population size
N, number of cycles (iterations), and the exploration parameter limit should be set prior to running the optimization. The number of cycles (iterations) and the parameter limits are equally important, and, to obtain the best results, should be set to their optimal values. It must be noted that in the ABC method, employed bees apply a local search to each nectar source, whereas the onlooker bees will likely update better food sources. Therefore, in the ABC algorithm, the employed bees are responsible for diversification whereas the onlooker bees are used for condensation. By implementing these three groups of bees (employed, onlooker and scout), the ABC algorithm easily escapes from minimums and improves its search efficiency. The ABC algorithm is competitive with other nature-inspired algorithms [
20]; its implementation is relatively easy, and it requires only a few tuning control parameters to be set.
Due to the high efficiency of the ABC method, many researchers have used their own points of view to utilize ABC for different purposes. For instance, Gao and Liu [
21], inspired by differential evolution (DE), developed a search strategy ABC/best/1 with a new chaotic initialization method with a subsequent improvement of the exploitation ability of ABC. Zhu and Kwong [
22] developed a global best- (gbest-) guided ABC algorithm (GABC) to improve the search ability as well as the efficiency by using the gbest solution with the original search formula of the ABC algorithm. Li et al. [
23] presented a modified ABC method (I-ABC) using the best-so-far solution, inertia weight, and coefficients to improve the search efficiency. Banharnsakun et al. [
24] presented an improved search equation that causes the solution to directly converge towards the best-so-far solution rather than through a randomly selected path. Xiang and An [
25] developed an efficient and robust ABC algorithm (ERABC), in which a combined solution search equation is used to accelerate the search process. Xianneng and Yang [
26] introduced a new ABC method with memory (ABCM) to guide the further foraging of the artificial bees by combining other search equations to select the best solution. Garg [
27] used ABC to handle reliability-redundancy allocation optimization problem. The core steps of the ABC approach can be found in the given reference [
28].
3.2. Firefly Algorithm Method
Xin-She Yang proposed the Firefly Algorithm (FFA) [
29] which was inspired by the flashing lights of fireflies. Almost all of the firefly species use flashing lights as an attraction communication signal between females and males. The recurring flash, the flashing rate, and the time delay between flashes are the key concepts used among fireflies to share information. Although the mechanism of flashing lights in fireflies is still largely unclear, it is obvious that this signaling system helps fireflies find food, protect themselves, and attract their prey.
FFA has become one of the most efficient global optimization algorithms and has been used in many real-life problems [
29]. In FFA, the objective function is connected to the flashing light. In other words, the brightness is proportional to the best solution of an optimization problem. Brightness will assist fireflies to travel to shinier and more attractive positions in order to find the global best solution. There are three important rules in the FFA procedure:
Fireflies are socially oriented insects, and regardless of their sex, all of them move towards more attractive and brighter fireflies.
The amount of attraction of a firefly is proportionate to its brightness; hence, a firefly that has less brightness will travel toward one that has higher brightness. The attractiveness decreases as the space from the other firefly rises since air absorbs light. If there is no brighter firefly in the vicinity, fireflies will travel randomly in the design space.
The brightness (light intensity) of a firefly is specified by the objective function value of the optimization problem.
In the firefly method, there are two essential keys: the variation of the light density and the formulation of the attractiveness. FFA assumes that the attraction of a firefly is determined by its shine, which is always connected with the value of the objective function:
, where
is the brightness of a firefly at position
and
is the value of the objective function.
is defined as the attractiveness of a firefly
i to firefly
j, which is affected by the distance between them.
is the attractiveness at
, where
is the space between two fireflies. Coefficient
is the fixed light absorption value. Over the iterations, fireflies converge to the local optimal solutions. The global solution can then be obtained by comparing the local solutions. Implementation of FFA is often easier than other nature-based GO algorithms such as PSO, BA and ACO. FFA is reasonably efficient in solving many continuous complex optimization problems that are challenging to other powerful GO algorithms such as GA and PSO [
30].
The Firefly algorithm has gained much attention, and, due to its simplicity, many modifications on the FFA have been achieved. Some instances of the attention that the Firefly algorithm has received are: Bhushan and Pillai [
31] compared the performance and the effectiveness of FFA in dealing with nonlinear optimization problems against GA. Farahani et al. [
32] employed FFA in solving continuous practical global optimization problems in dynamic environments. Younes et al. [
33] implemented a hybrid FFA for solving multi-objective continuous/discrete GO problems. Talatahari et al. [
34] used FFA to find the optimum design of structure design problems. Hassanzadeh et al. [
35] modified FFA to deal with image processing optimization problems. Jati [
36] employed FFA to solve many complicated GO problems such as TSP. Arora and Singh [
37] considered the optimal choice range of FFA parameters in different numeric experiments. Bidar and Rashidy [
38] improved FFA by adjusting the parameter controller in order to balance the exploitation and exploration of the algorithm. Gandomi et al. [
39] introduced a hybrid algorithm by combining the Fuzzy C-Means (FCM) with FFA to improve the clustering accuracy with global optimum solutions. Farahani et al. [
40] increased the efficiency of FFA by stabilizing the algorithm’s movement to direct the fireflies towards the global best if there is no better solution found.
3.3. Cuckoo Search Method
Another recent nature-inspired global optimization method is the Cuckoo Search (CS) approach developed by Yang in 2009 [
41]. The CS method is based on the natural obligatory brood parasitic behaviour of cuckoo birds in integration with the Lévy flight. A cuckoo bird places its eggs in another bird’s nest to be brooded by the mother bird of another species. In some cases, other birds engage in battle with the stranger cuckoos when the other bird realizes that the eggs in her nest are not her own. In this case, the other bird either destroys the unwelcome eggs in the nest or leaves its own nest and rebuilds a new one elsewhere. Some cuckoo female species have developed a new strategy based on imitating the colours and shapes of the eggs of other birds to increase the chance of reproduction and decrease the probability of desertion by the other bird. In general, the cuckoo’s eggs hatch before the other bird’s eggs, thus the first job of the cuckoo chick is to get rid of the other bird’s eggs to increase its own chance of being fed by the resident mother bird. This knowledge of the Cuckoo bird has been used to develop the CS algorithm.
The easiest way of applying the CS algorithm is achieved through the following three steps [
42]. First, every cuckoo bird places only one egg at a time in a random nest. Second, the best nests (solutions) with a good quality of eggs are selected for the next population. Third, the number of nests is constant, and the egg deposited by a cuckoo is recognized by the other bird with a probability of
. Therefore, the other bird may either destroy the alien eggs or relinquish the nest and establish a new nest. The last assumption can be estimated as the fraction
of the
nests when new nests (completely new solutions) are substituted. In the CS method, every egg in a nest expresses a solution, and each cuckoo can only deposit one egg. This algorithm can also be used when the problem is more complex such as where each nest could hold several eggs representing a number of solutions. Further, each cuckoo can be simply considered as a random point in the design space while the nest is the memories that are used to keep the previous solutions and compare them with the next solutions.
CS is used in dealing with high-dimensional, linear and nonlinear GO problems. A recent study showed that CS is more effective and robust than PSO and GA in multi-modal objective functions [
41,
42]. This is partly due to the fact that there are a limited number of parameters to be adjusted in the CS method compared to other GO algorithms such as PSO and GA. A comprehensive description of the structure of the CS method is available in [
42].
Since the development of the CS method in 2010, several studies have been introduced to improve its performance. Walton et al. [
43] modified the CS algorithm to be more effective in handling nonlinear GO problems such as mesh generation. Yildiz [
44] employed the CS algorithm to find the optimal parameters for a machine in the milling process. Vazquez [
45] used the CS algorithm with artificial neural network model can to deal with different linear and non-linear problems. Kaveh and Bakhshpoori [
46] applied the CS algorithm in designing steel frames. Chifu et al. [
47] used a modification of the CS algorithm to optimize the semantic web service. Tein and Ramli [
48] proposed a discrete CS algorithm to solve nurse scheduling problems. Choudhary and Purohit [
49] applied the CS algorithm to solve software data generation problems. Bulatovic’ et al. [
50] applied the CS algorithm in handling a six-bar optimization problem. Speed [
51] modified the CS algorithm to be used efficiently in dealing with large-scale problems.
3.4. Bat Algorithm Method
The Bat Algorithm (BA) is a mature nature-based algorithm proposed by Yang based on prey tracking behaviour [
52]. Using the concept of echolocation, bats create sounds while flying about hunting for food. These sounds are reflected to the bat providing useful information about the targets. This mechanism enables bats to identify the type of the objects, the distance from the target, and the kind and speed of the prey. Bats have the capability to establish three-dimensional pictures around the hunting area using their advanced echolocation strategy [
53,
54].
While hunting, bats move randomly with velocity
at location
sending pulses with a range of frequency
(wavelength of
and loudness
) while searching for prey. Bats can control the frequency pulses and regulate the rate of pulse emissions
where
expresses that there are no emissions, and
expresses that the emissions of bats are at their maximum power. In BA, the loudness can be controlled from maximum (positive)
to the lowest value. Note that
expresses that a bat has reached its target and has stopped releasing any sounds. In BA,
is the best so far global solution and is obtained from among all achieved solutions. The value of
depends on the size of the design space. The higher the frequency, the shorter the wavelength and the shorter the traveled distance. Bats use a limited range of frequencies from 200 to 500 kHz. The steps of BA are described in [
53,
54,
55].
BA is known as a very robust and efficient method in dealing with many engineering optimization problems [
56]. Although many publications on this algorithm exist, BA still attracts a great deal of interest from scientists and is used in a wide range of applications. Many researchers studied BA to ensure that it is able to avoid becoming trapped into local minima. For instance, Xie et al. [
57] introduced a combination of Lévy flight with the BA (DLBA). Lin et al. [
58] presented another hybrid of Lévy flight and bat approach (CLBA) for parameter approximation in a nonlinear dynamic model. Yılmaz and Kucuksille [
59], motivated by the PSO algorithm and the ABC algorithm, proposed an improved bat algorithm (IBA) to advance the exploration mechanism of the algorithm. Wang and Guo [
60] integrated the harmony search (HS) method into BA, and developed a hybrid metaheuristic (HSBA) method to increase the convergence speed of BA. Zhu et al. [
61] improved the exploration capability of BA by modifying its equations. Afrabandpey et al. [
54] introduced the chaotic sequences into BA in order to escape local convergence. Gandomi and Yang [
62] replaced the four parameters in BA by different chaotic systems to increase the global search capability of BA. Kielkowicz and Grela [
63] introduced some modification to the Bat Algorithm to solve nonlinear optimization.
3.5. Flower Pollination Algorithm Method
The Flower Pollination method (FPA) is stimulated by the nature of flower pollination [
64]. The main objective of flower pollination is reproduction. Pollination occurs in two main ways: abiotic and biotic. The majority of flowers use biotic pollination, where a pollinator such as a bee, a fly or a bird transfers pollen. In some cases, flowers and insects have special cooperation, where flowers catch the attention of and rely solely on a certain species of insect to ensure an effective pollination process. Abiotic pollination is the result of wind and moving water and does not need any pollinators [
64].
Self-pollination and cross-pollination are only two methods of flower pollination [
65]. Self-pollination can happen when pollen is transferred from the same flower or to a different flower on the same plant when no pollinator is available. Therefore, this is considered to be a local solution. Cross-pollination happens when pollination transfers from the flowers of another plant. Biotic, cross-pollination can happen with long distance pollination and can be achieved by pollinators as a global solution. Those pollinators can behave as Lévy flight obeying Levy distribution steps. Hence, this behaviour was used to design FPA. In FPA,
is considered to be the flower pollen population, where
indicates the current iteration, and the parameter
is the density of the pollination. In FFA both local search and global search can be adjusted by changing the probability between
in order to reach the optimum solution. The mechanisms described above are formulated into mathematical expression in order to solve any optimization problem of interest. FPA has many advantages in comparison to other nature-inspired algorithms—in particular its simplicity and flexibility. Moreover, FPA requires only a few tuning parameters making its implementation relatively easy. PA has been efficiency adapted to deal with a number of real-world design GO problems in engineering and science. Alam et al. [
66] used FPA for solving problems in the area of solar PV parameter estimation. Dubey et al. [
63] modified FPA to deal with the fuzzy selection of dynamic GO problems. Yang et al. [
17] extended FPA to solve multi-objective GO problems, developing a multi-objective flower pollination algorithm (MOFPA). Henawy et al. [
67] introduced a hybrid of FPA combined with harmony search (FPCHS) to increase the accuracy of FPA. Wang and Zhou [
68] presented a new search strategy called a Dimension by Dimension Improvement of FPA (DDIFPA) to enhance the convergence speed and solution quality of the original FPA. Kanagasabai et al. [
69] integrated FPA with PSO (FPAPSO) to deal with reactive power dispatch problems. Meng et al. [
70] presented a modified flower pollination algorithm (MFPA) while attempting to optimize five mechanical engineering design problems. Binh et al. [
71] proposed the Chaotic Flower Pollination Algorithm (CFPA) to overcome the large computation time and solution instability of FPA. Łukasik et al. [
72] studied FPA in solving continuous global optimization problems in intelligent systems. Sakib et al. [
73] also presented a comparative study of FPA and BA in solving continuous global optimization problems. The main steps and the mathematical equations of FPA are explained in detail in [
17].
3.6. Grey Wolf Optimizer Method
The Grey Wolf Optimizer (GWO) approach is a recently proposed algorithm by Seyedali [
74] and is based on the behaviour of grey wolves in the wild [
18,
74]. GWO simulates the leadership policy and hunting strategy of a grey wolf’s family in its natural habitat. GWO is similar to other nature-inspired population-based approaches such as GA, PSO and ACO. In a family of grey wolves, there are four different groups: alpha, beta, delta and omega. The alpha, which is always male, is in charge of making decisions in hunting, selecting rest and sleeping places, etc., and its decisions must be obeyed by the rest of the family. Due to its dominating role, alpha is placed at the top of the family pyramid. Beta is at the second level in the family, and its duty is to support the alpha’s decisions or other family initiatives. Beta can be female or male, and, because of its experience working alongside the alpha, can replace the alpha if it becomes necessary. Beta acts as a counsellor to the alpha and ensures that the alpha’s orders are applied in the community, while at the same time, it guides the lower-level wolves. Further down the pyramid is the Delta which must follow the orders of the alpha and beta wolves but has domination over the omega. The duty of the delta is to defend and provide safety to all family members [
75]. Omega is the lowest ranked among the grey wolf family and plays the role of scapegoat. Omegas are the last group of the grey wolf family to eat from the prey, and its duty is to take care of the new born pups. These three groups are used to simulate the leadership hierarchy in the grey wolf family. The first three groups lead omega wolves to search the space. During this search, all members update their positions according to the locations of the alpha, beta and delta.
In GWO, there are three steps of hunting which must be realized: finding prey, surrounding prey, and finally attacking and killing prey. Through the optimization procedure, the three most effective candidate solutions are alpha, beta and delta, as they are likely to be at the location of the optimal solution. Meanwhile the omega wolves must relocate with respect to the location of the other groups. As laid out in the GWO algorithm, alpha is the fittest candidate, but beta and delta gain better information about the potential position of prey than omegas. Accordingly, the best three solutions are saved in the database, while the rest of the search agents (omegas) are obliged to update their position according to the position of the best solution so far. In GWO, is the wolf population, indicates the number of iteration, and are random parameters , , represents the location vector of the prey, is the location of the agent, and is a random value to update position.
The GWO algorithm is recognized as being a capable and efficient optimization tool that can provide a very accurate result without becoming trapped in local optima [
76]. Because of its inherent advantages, GWO is used in several optimal design applications. Kamboj et al. [
77] successfully applied GWO in solving economic dispatch problems. Emary et al. [
78] dealt with feature subset selection problems using GWO. Gholizadeh [
79] utilized GWO to find the best design for nonlinear optimization problem of double layer grids. Yusof and Mustaffa [
80] developed GWO to forecast daily crude oil prices. Komaki and Kayvanfar [
81] employed GWO to solve scheduling optimization problems. El-Fergany and Hasanien [
82] integrated GWO and DE to handle single and complex power flow problems. Zawbaa et al. [
83] developed and applied a new version of GWO called the binary grey wolf optimization (BGWO) to find the optimal zone of the complex design space. Kohli and Arora [
84] introduced the chaos theory into the GWO algorithm (CGWO) with the aim of accelerating its global convergence speed. Mittal et al. [
85] proposed a modified grey wolf optimizer (MGWO) to improve the exploration and exploitation capability of the GWO that led to optimal efficiency of the method. GWO implementation steps are referenced in [
18,
81].
5. Experiments
Benchmark functions are used to assess the robustness and effectiveness of optimization algorithms. In this paper, fifteen benchmark functions, as computationally-expensive black-box functions with different properties and characteristics, are used to evaluate the efficiency of the aforementioned optimization approaches. In this regard, three experiments are performed. The first experiment compares the performance among the six discussed procedures (ABC, FFA, CS, BA, PFA, and GWO) while the iteration number is restricted. The second experiment tests the consequences of increasing the dimensions of the problem on the efficiency of the algorithm. The final experiment observes the sensitivity of the CPU time needed to obtain the global solution to the number of design variables (dimensional) change.
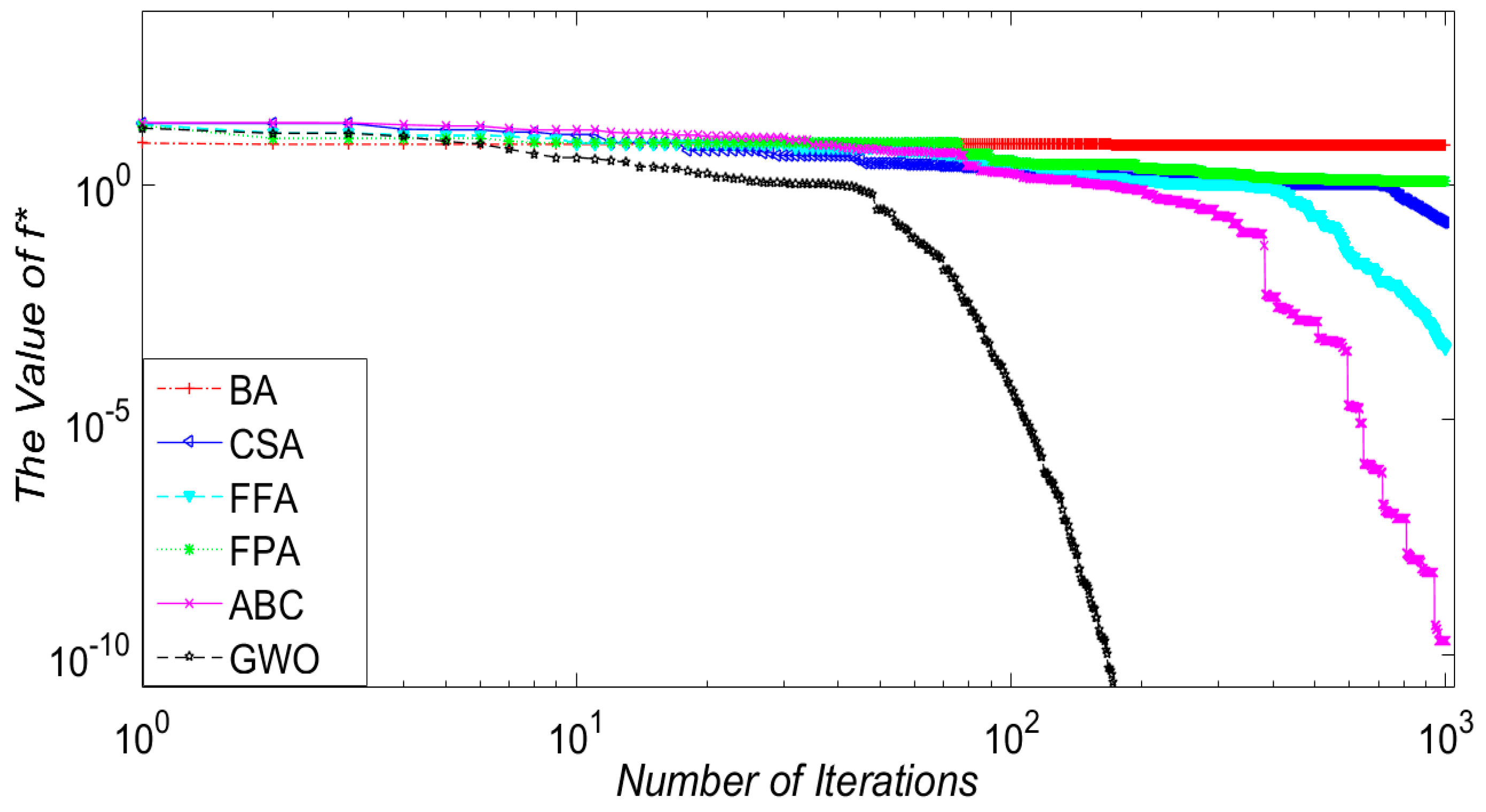
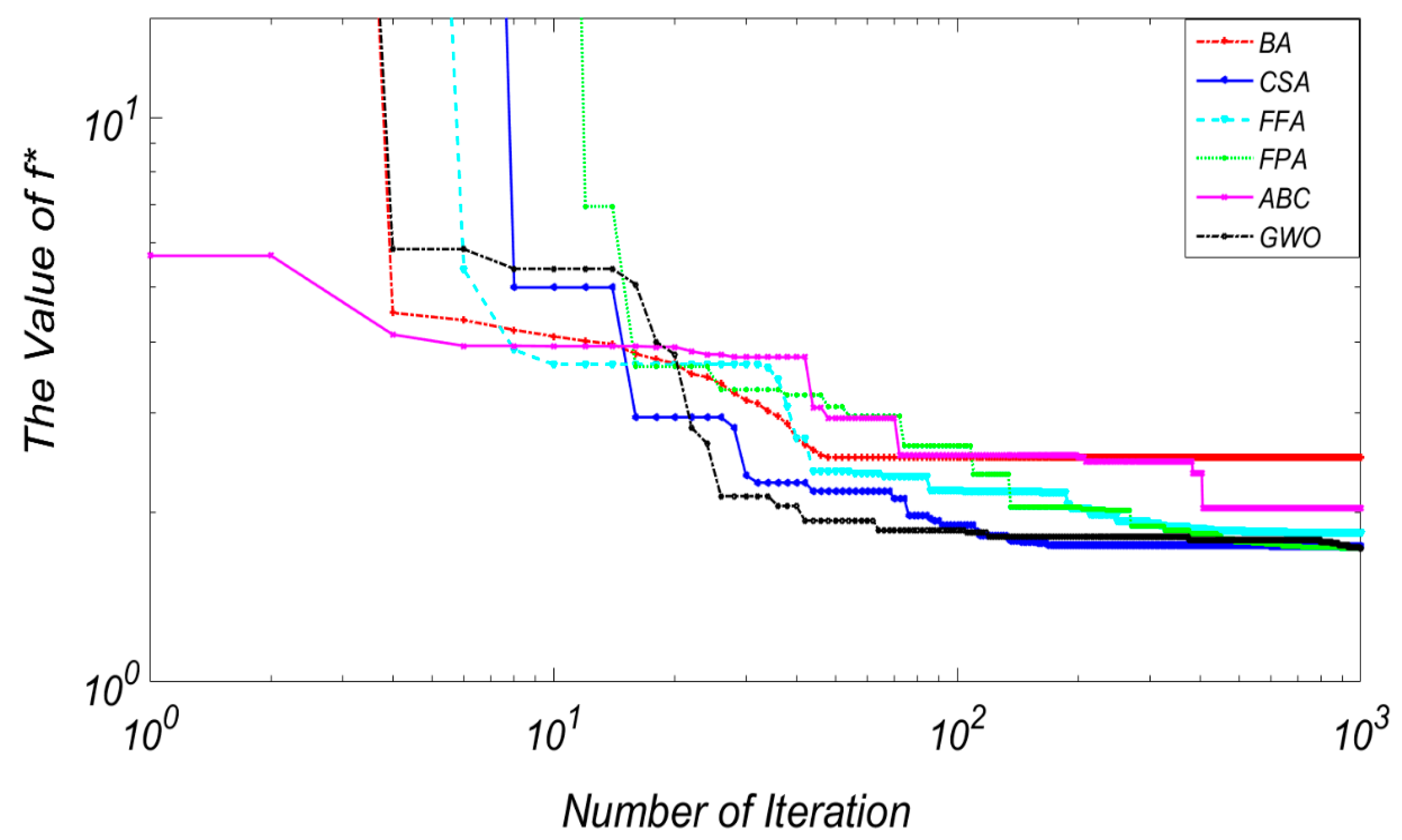
Experiment 1. The purpose of this experiment is to compare the optimization algorithms in terms of the efficiency when only a limited number of function evaluations (NFE) are available. In order to have unbiased comparisons, all approaches are restricted to the same iteration number (1000) as well as the same population size (40).
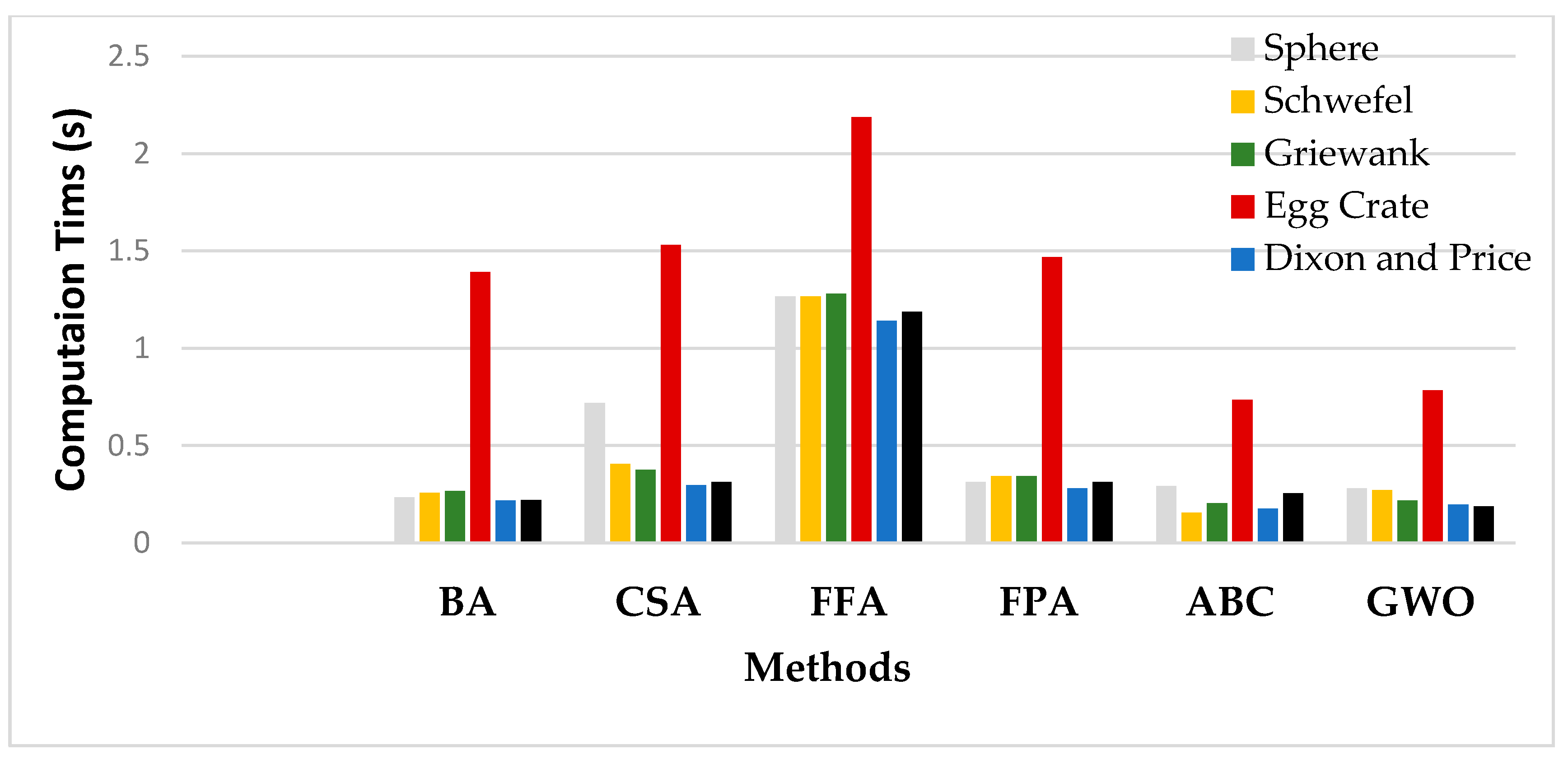
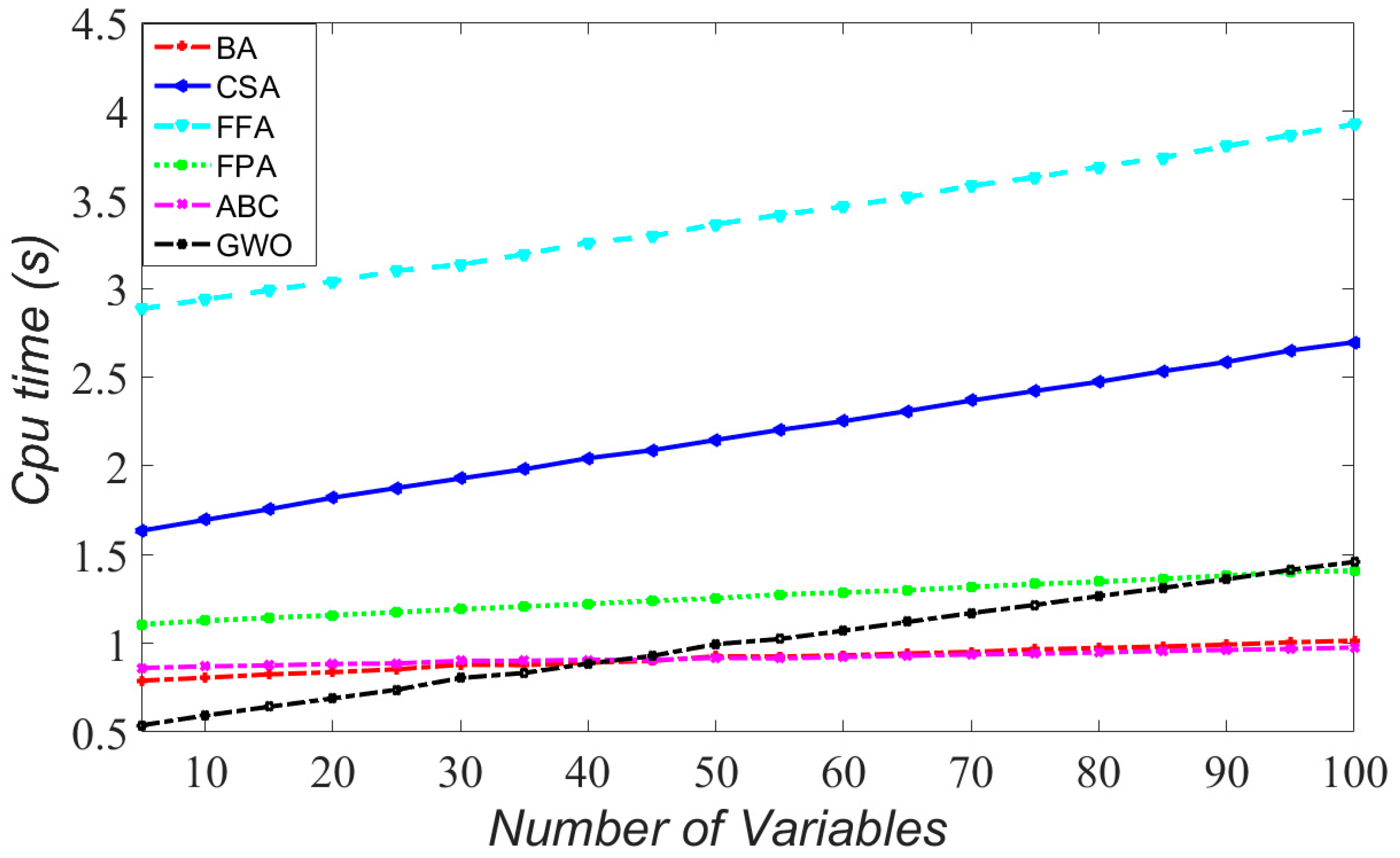
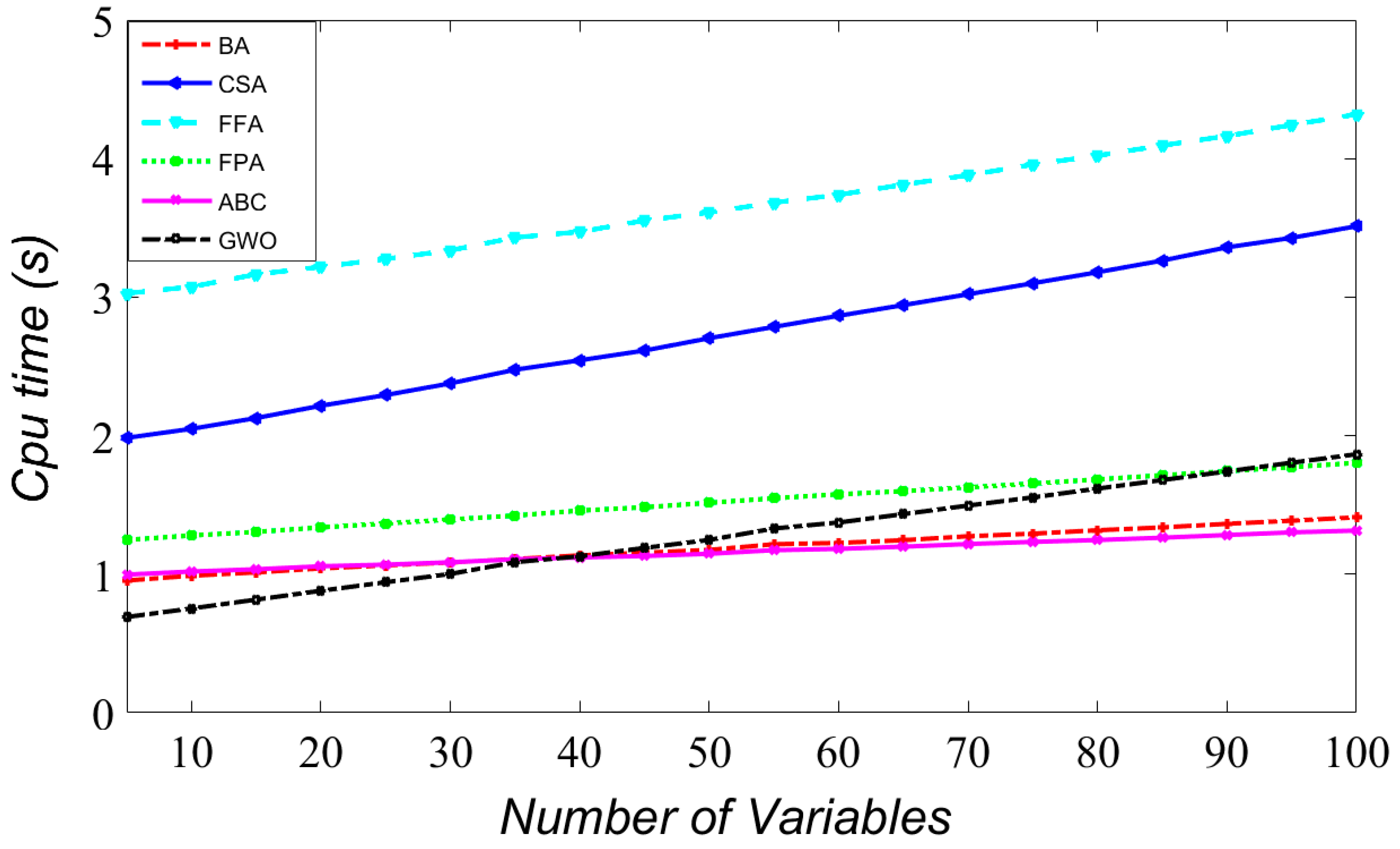
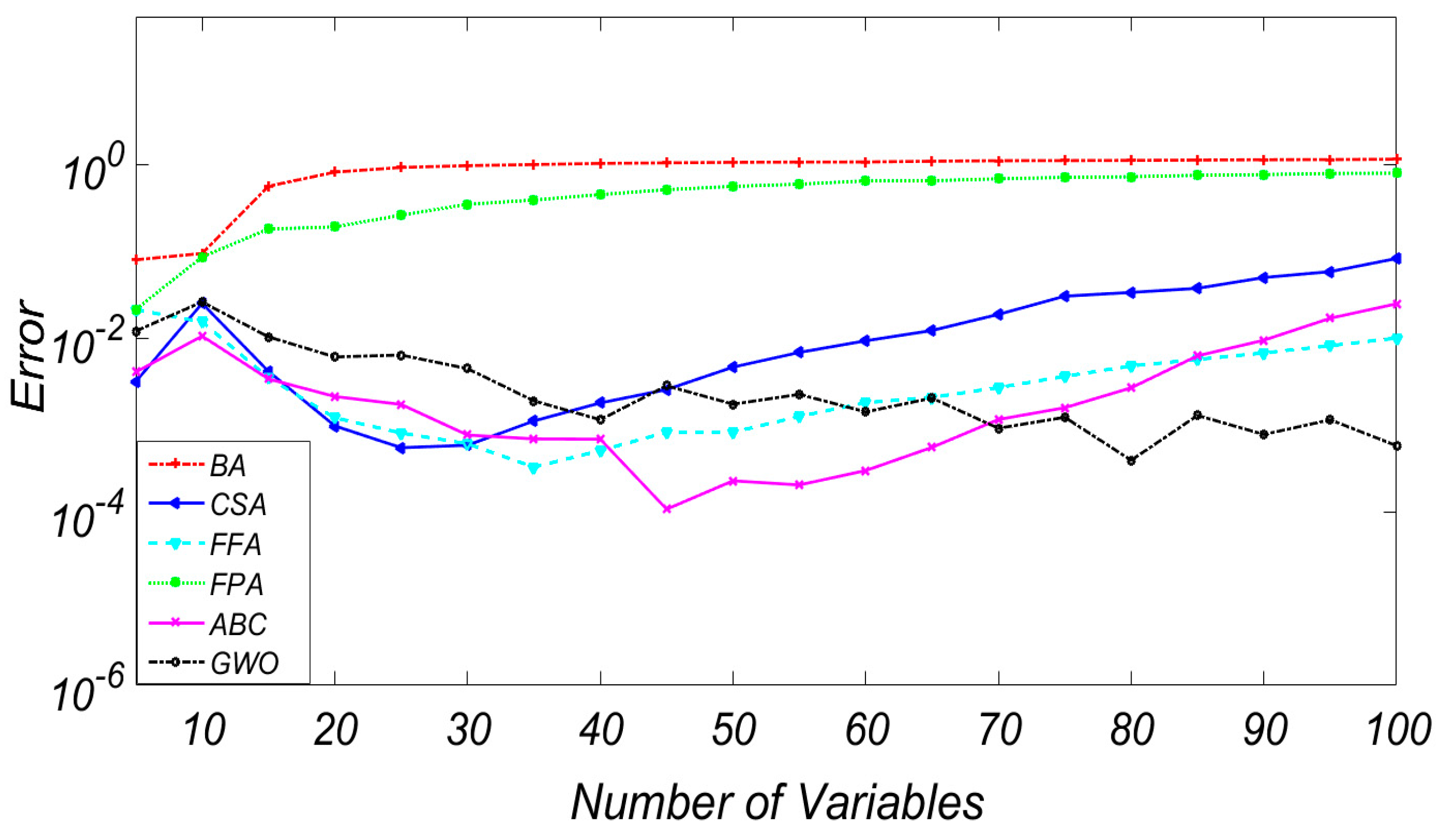
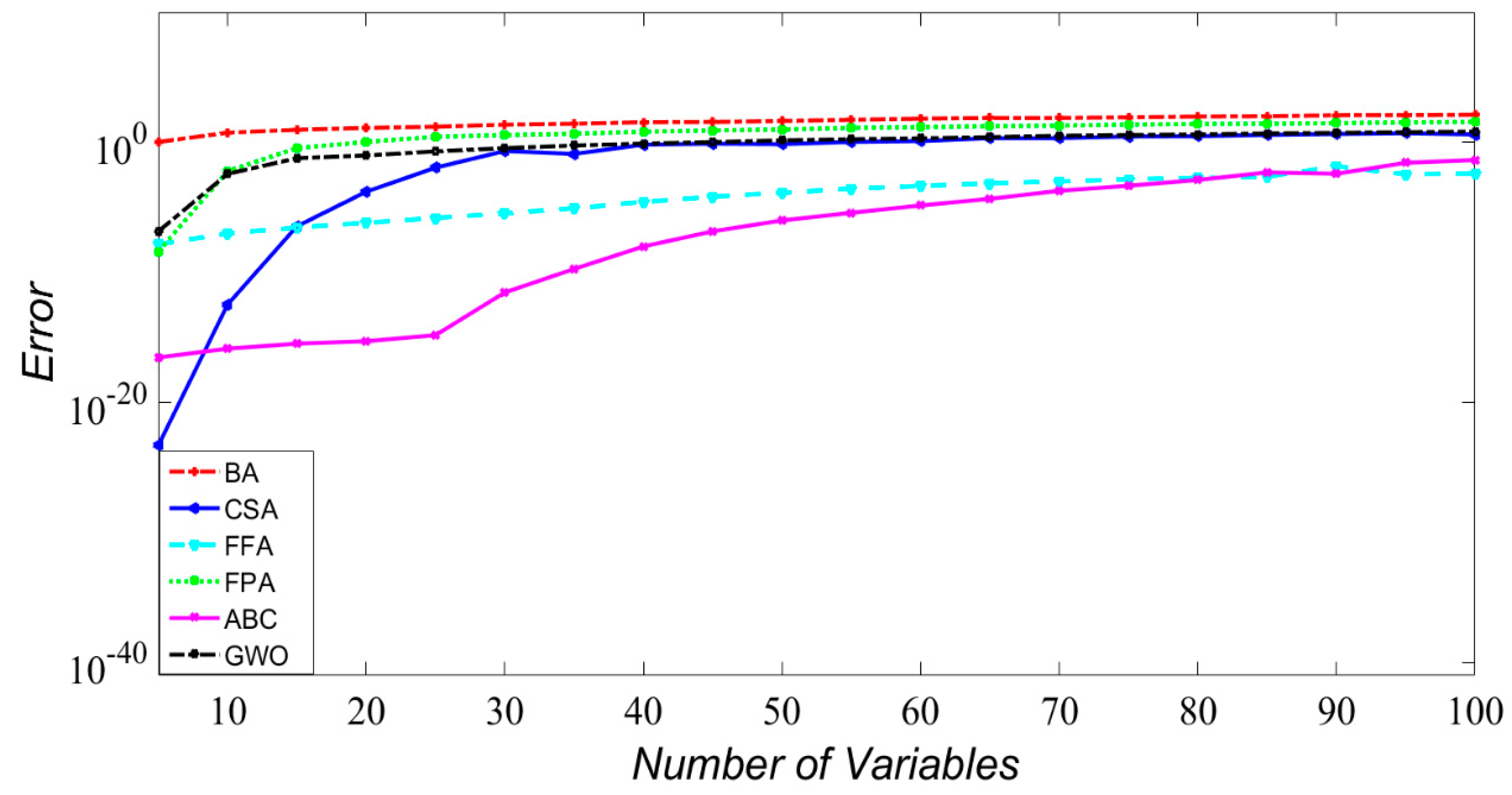
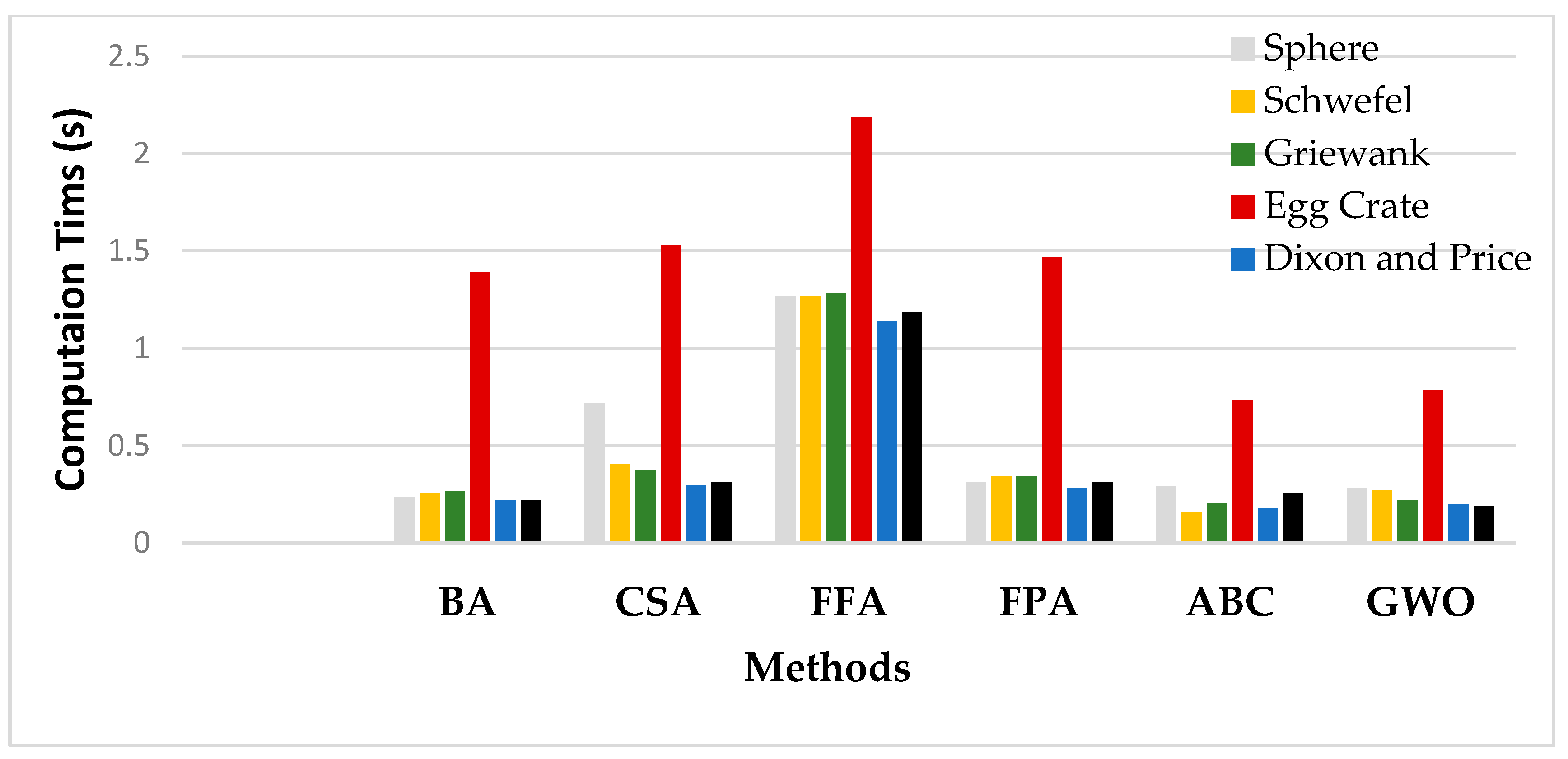
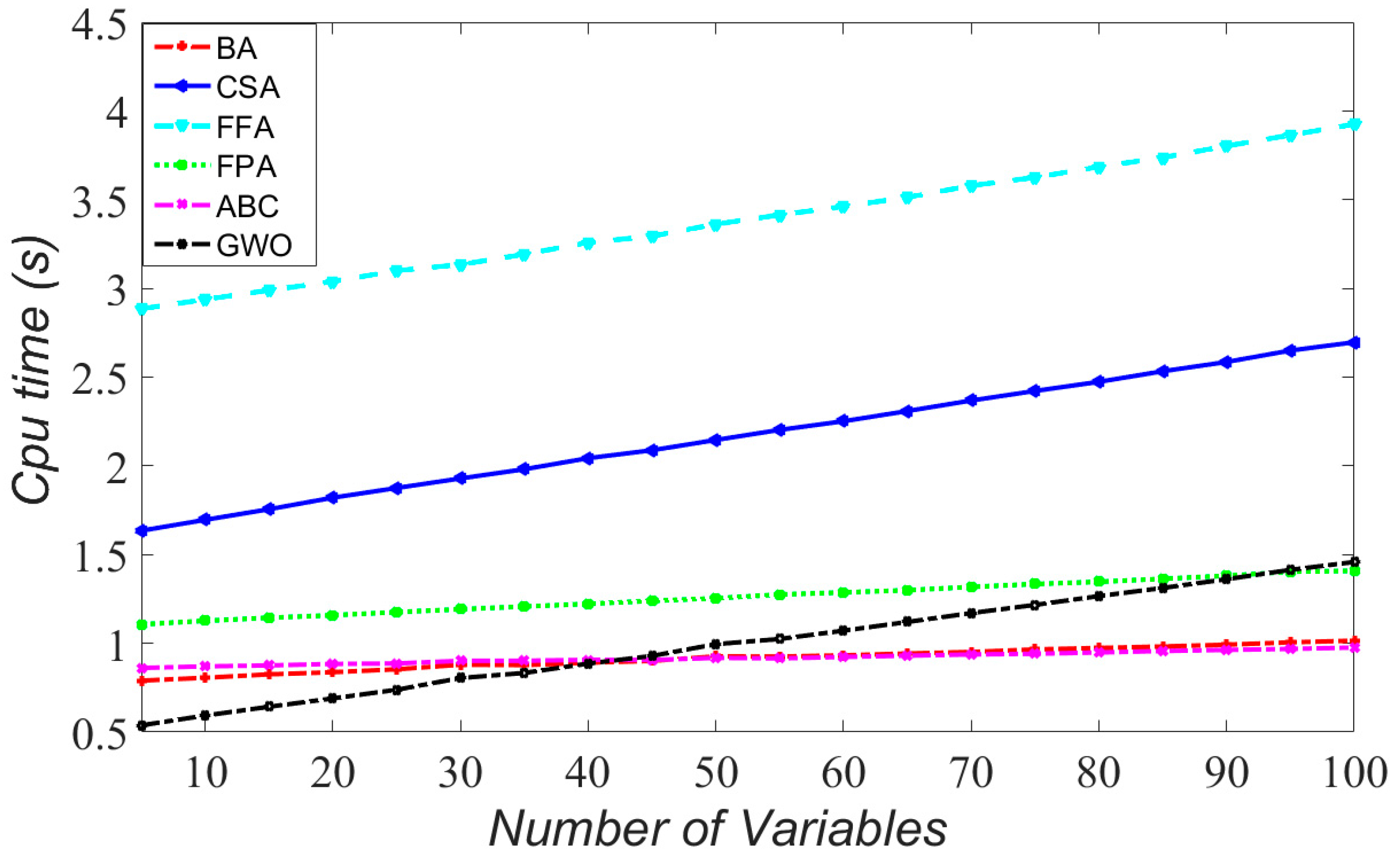
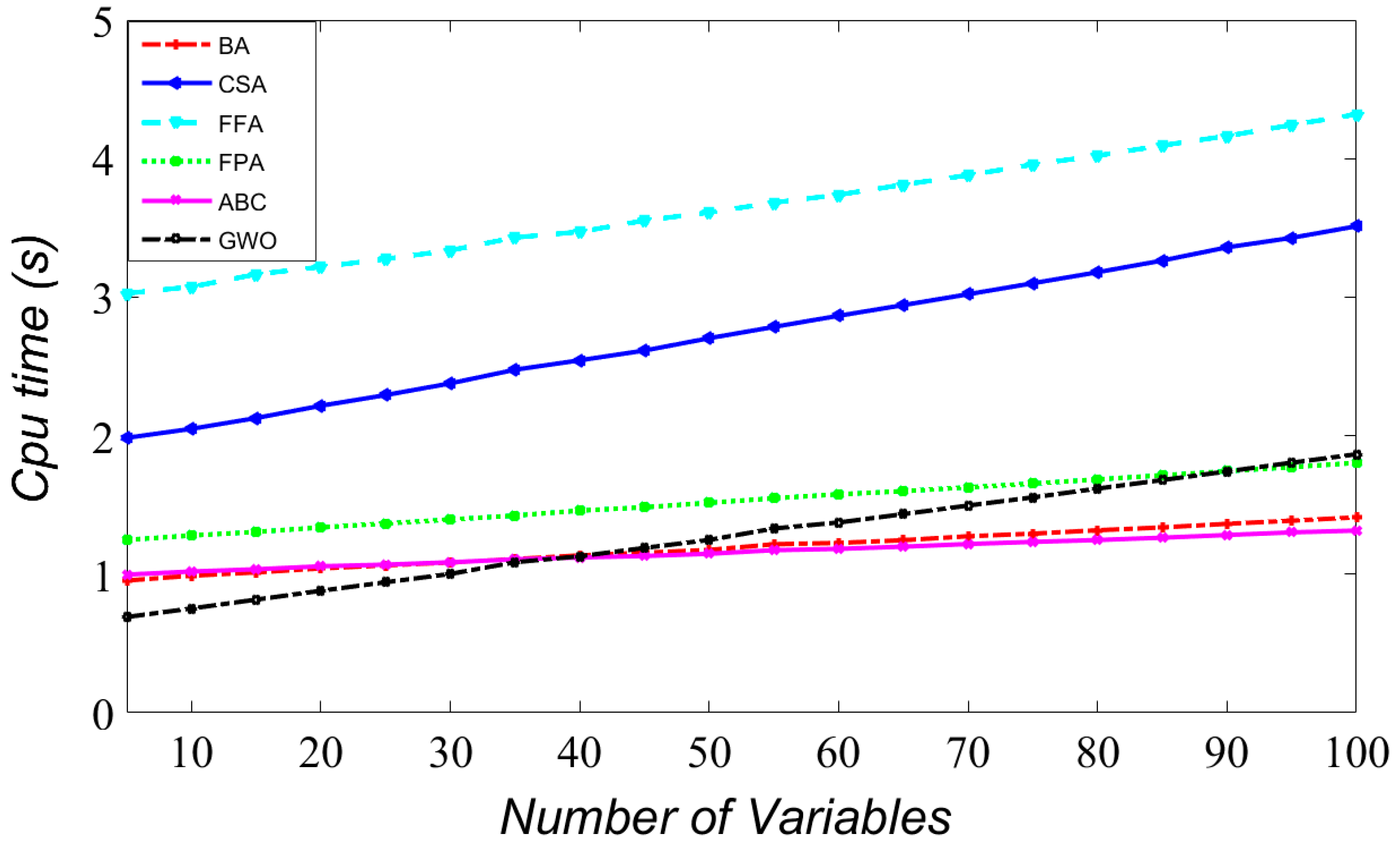
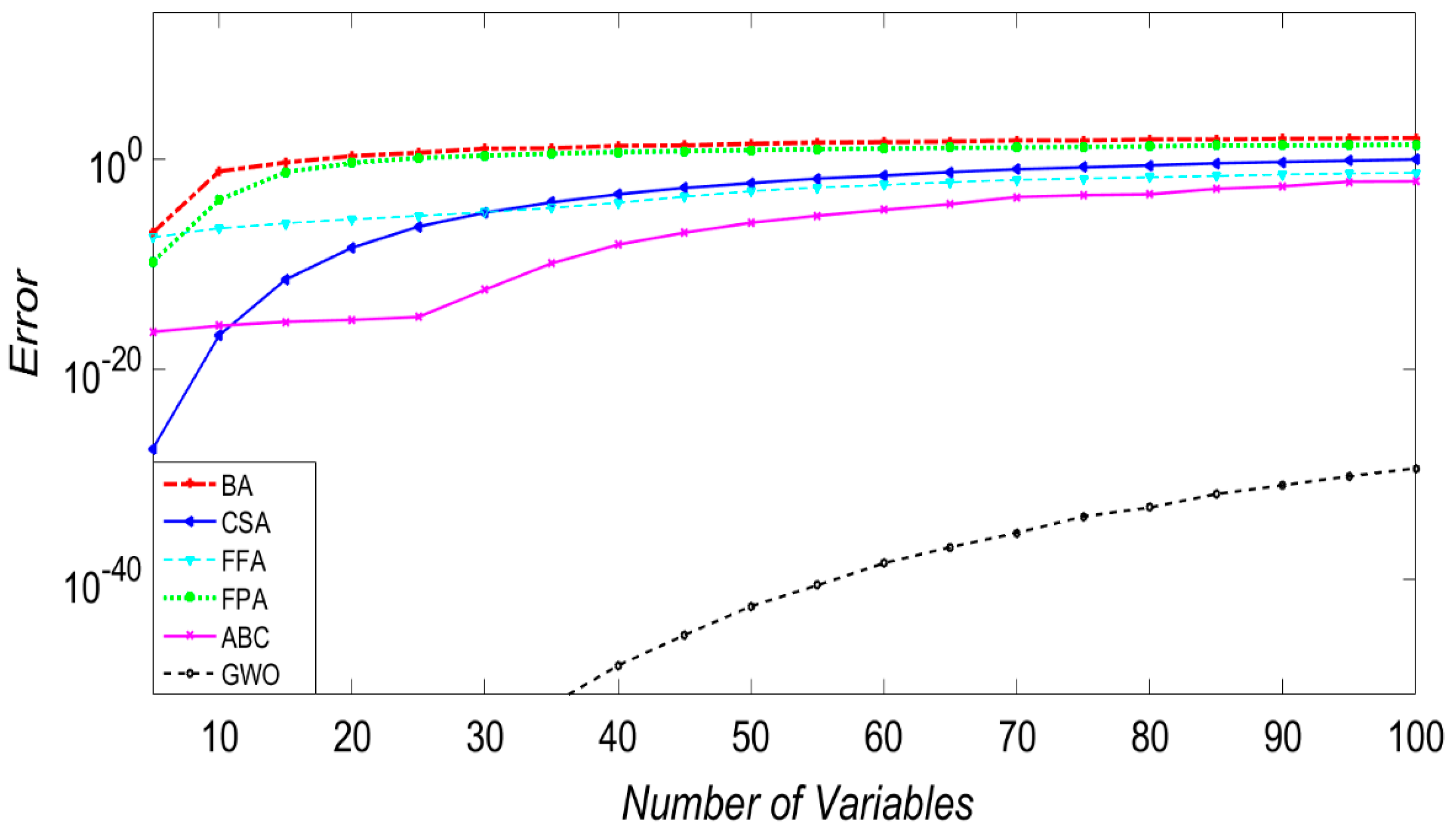
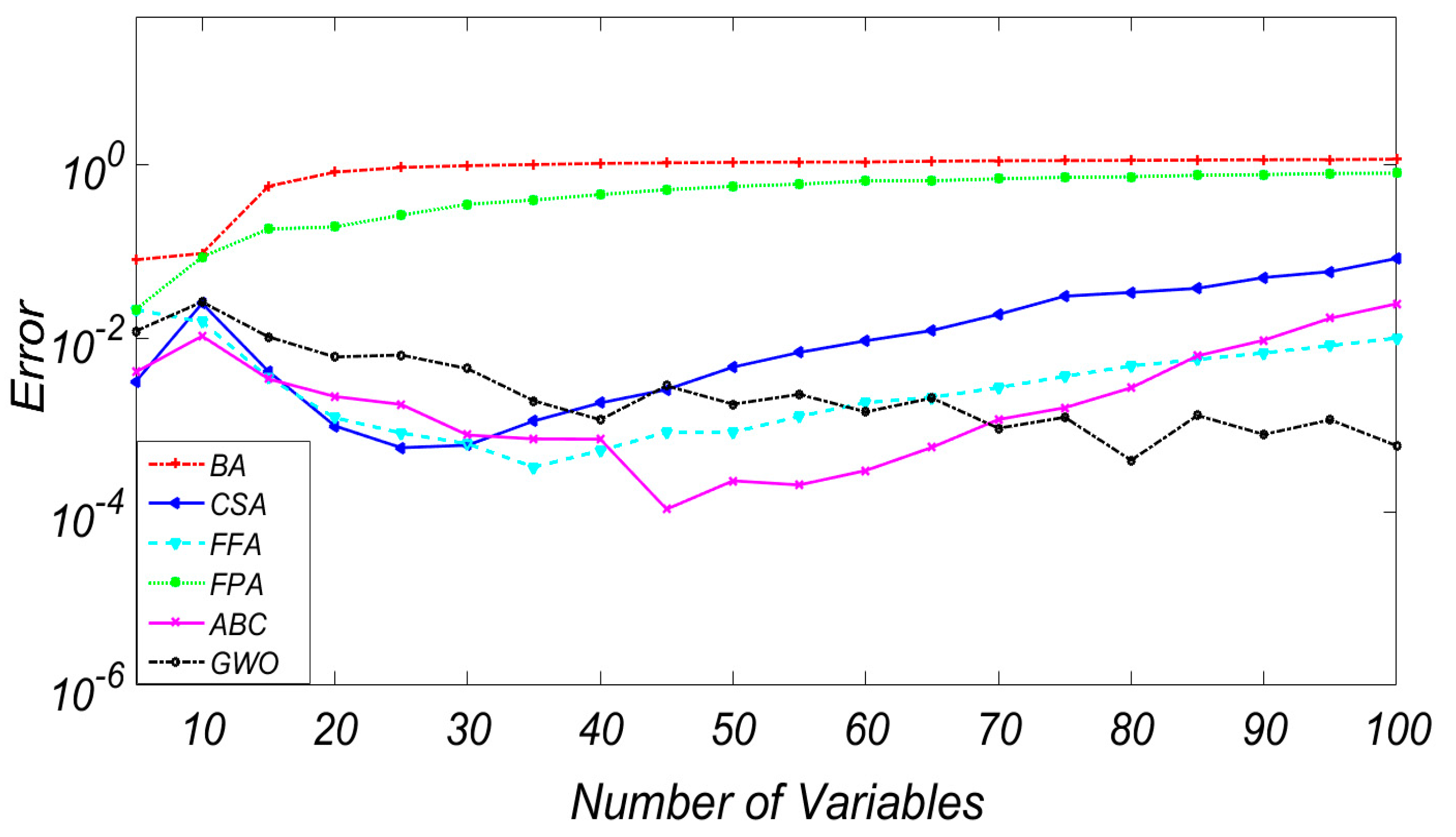
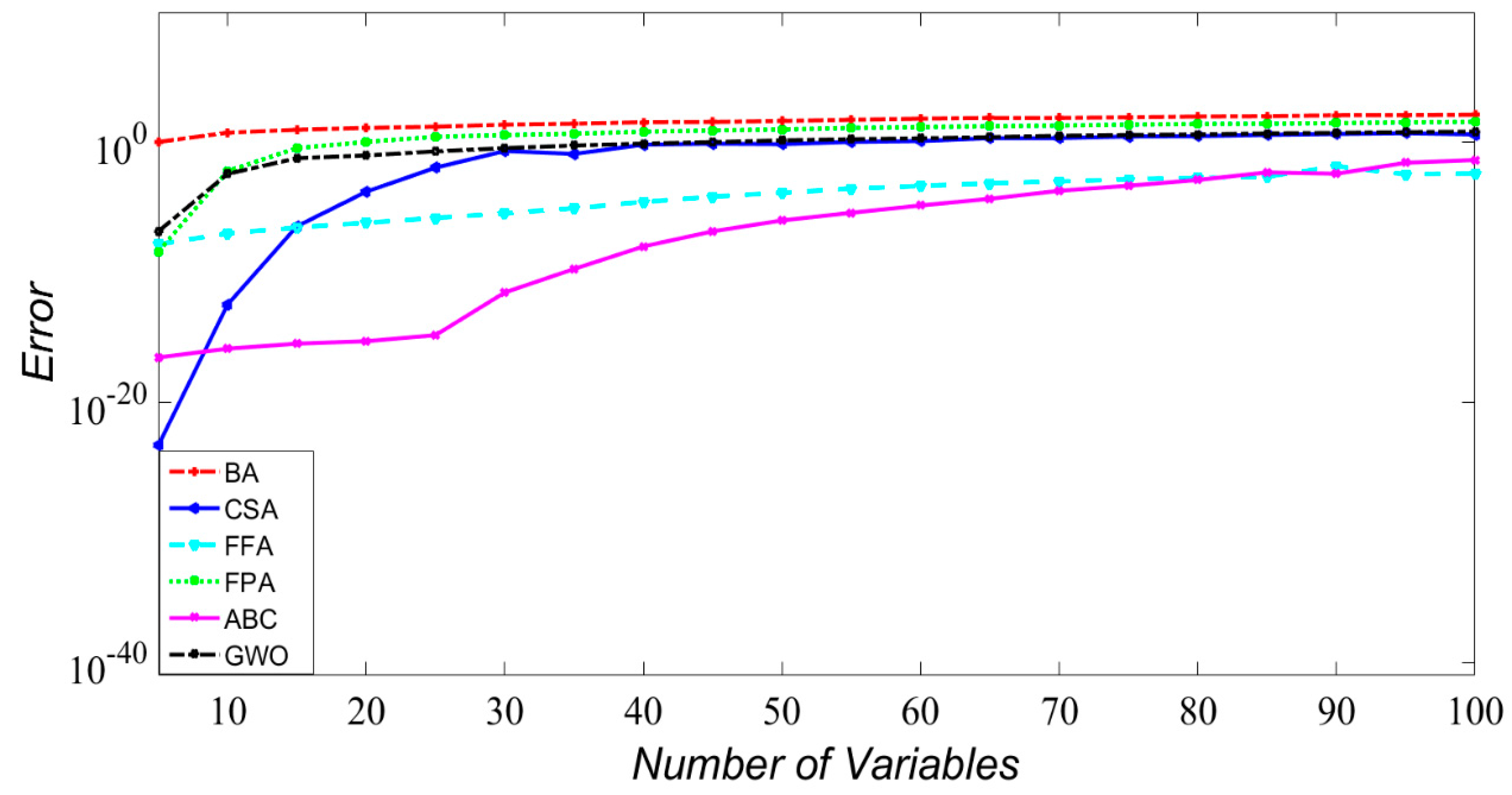
Experiment 2. The impact of increasing the number of variables on the resultant accuracy of the above algorithms is examined for fifteen high-dimensional benchmark functions considered as computationally expensive black-box problems. The selected benchmark problems with their properties are shown in Section 3.2. Experiment 3. The computation time needed for solving computationally-expensive black-box problems is the most important matter in assessing the efficiency of an algorithm. In this experiment, the above algorithms are also compared in terms of the computation (CPU) time required to reach the global solution on the same set of benchmark problems with different numbers of design variables (dimensions).
5.1. Setting Parameters in the Experiments
The setting of parameters is indeed an essential part of applying these algorithms, affecting the outcome of the search. It is imperative to set the parameters associated with each approach to its most appropriate values to obtain the best performance of the algorithms. Generally, these parameters are found prior to implementing the algorithm and remain unchanged during execution. Several studies indicate that the best mechanism for selecting parameters is based on intensive experiments to reach the optimal parameters of any algorithm [
88]. Yang X-S [
89] has conducted a number of runs to select the optimal setting parameters of BA. In the ABC algorithm, Akay and Karaboga [
90] have suggested efficient parameters to obtain the best results of ABC. Yuan et al. [
91] have recommended better parameter values in order to enhance the efficiency of FFA and converge the global optimum. Wang et al. [
92] have provided the optimal setting parameters of CS to solve the problem of Chaotic Systems in order to gain the best performance of the CA method. Yang [
93] has carried out parametric studies to obtain the best values for setting parameters of FPA. Rodríguez and Castillo [
94] have proposed the optimal setting parameters of the GWO to achieve the best performance of the GWO approach. The setting parameters used in
Table 3 of this paper are selected based on the studies mentioned in this section.
5.2. Experiments Results
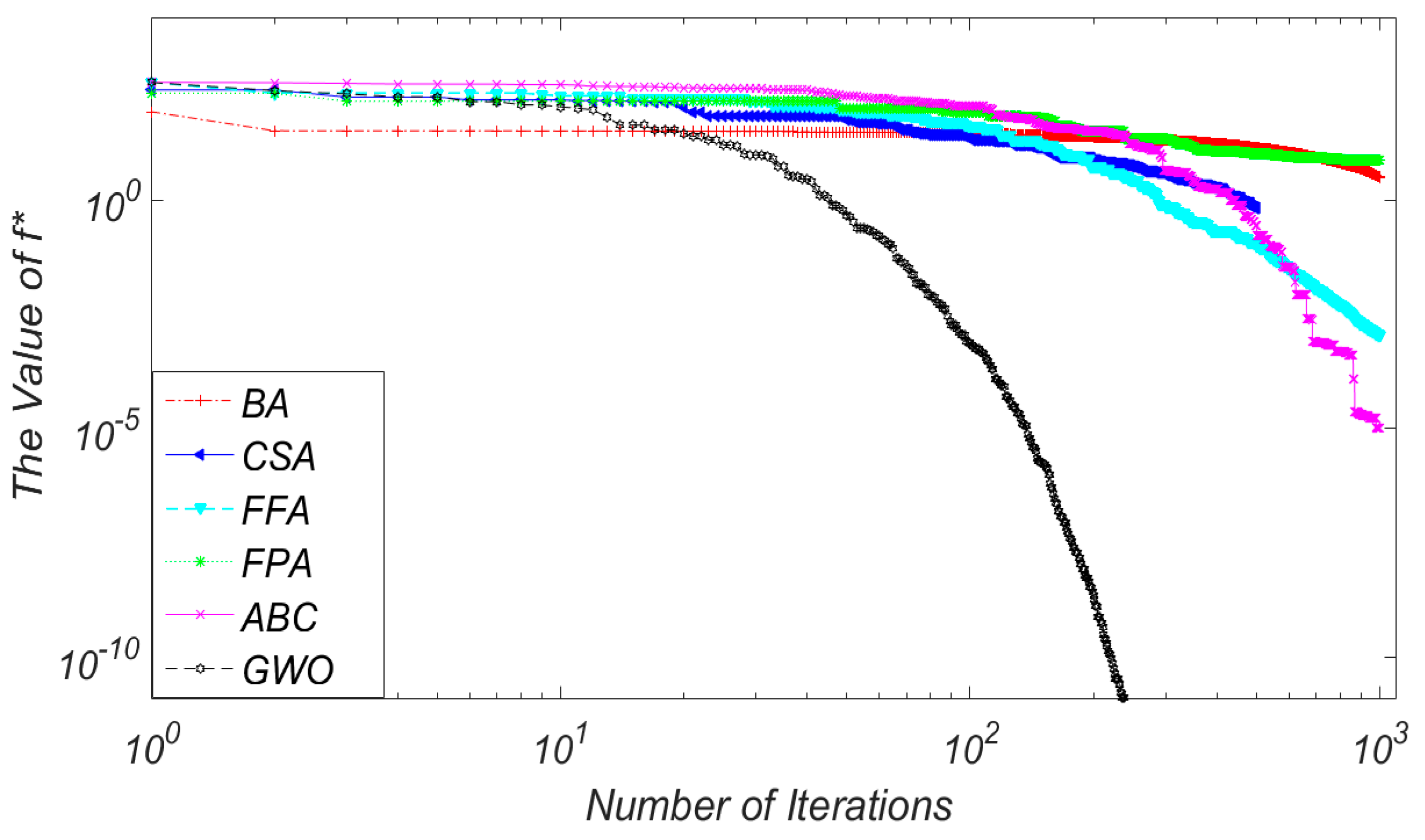
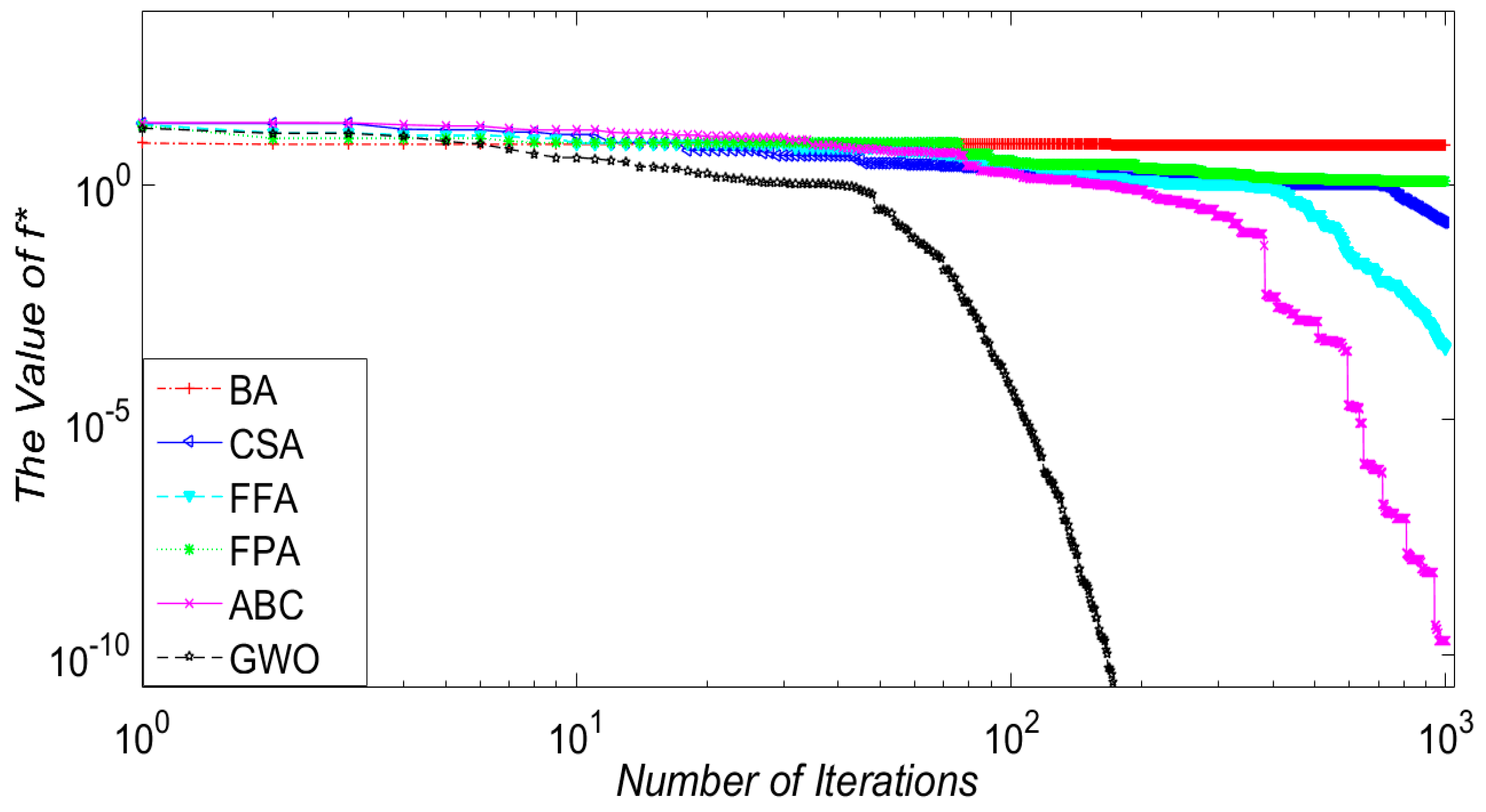
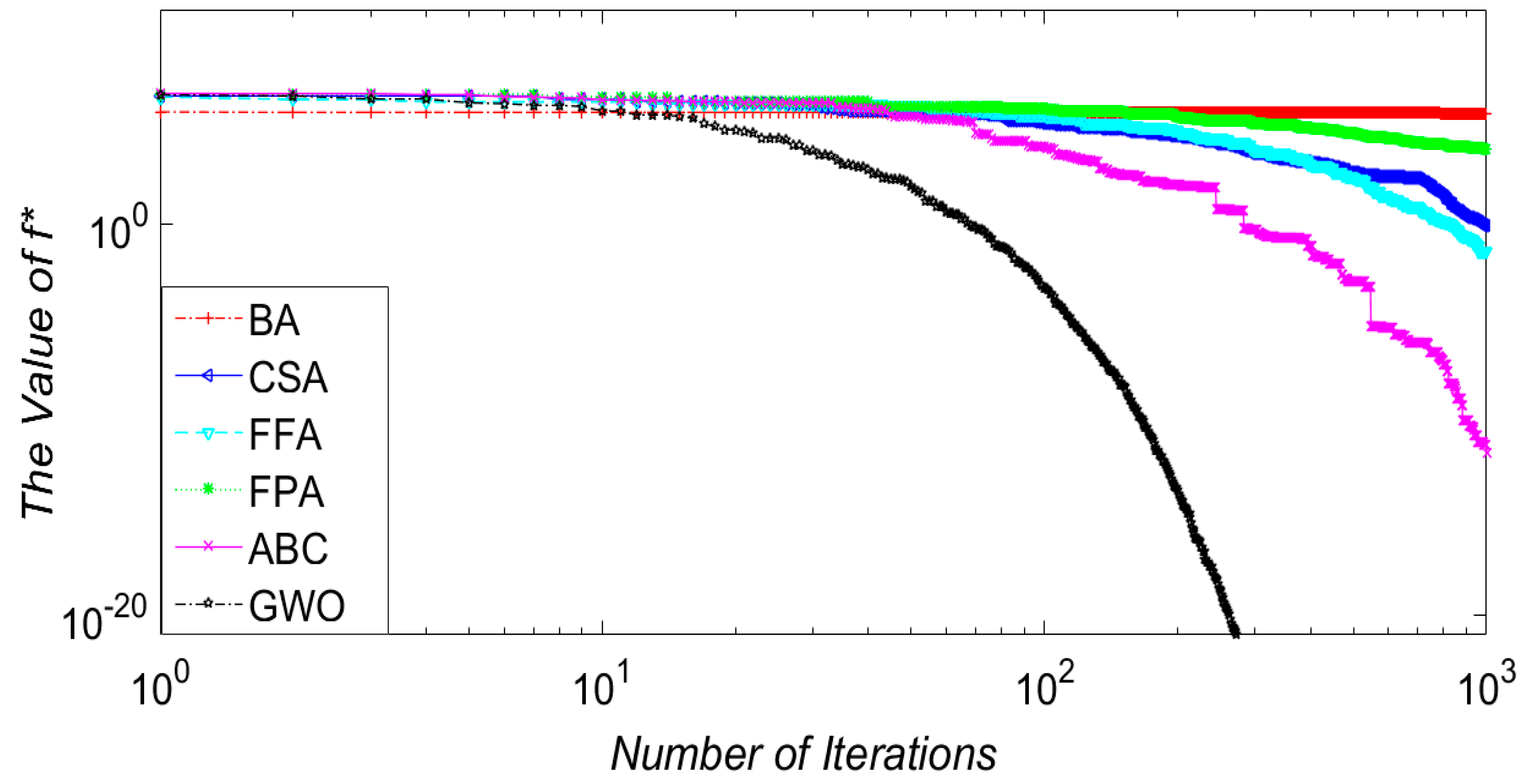
In this section, the optimization methods are compared against each other in terms of efficiency, capability and computational complexity using the fifteen high-dimensional benchmark functions. Although the overall performance of an optimization algorithm changes depending on setting parameters and other experimental criteria, benchmark problems can be used to indicate the efficiency of the algorithm under different levels of complexity. The statistical significance results from experiments on the selected benchmark functions are presented in
Table 4. From Figure 2 to Figure 10 present only the results for the constrained benchmark functions with different surface with
D = 25, 40 and 50. The outcome of this study may not reflect the overall efficiency of the tested algorithms under all conditions.
All experiments are conducted using a PC with a processor running at 2.60 GHz and 16 GB RAM in MATLAB R2015b running under Windows 8.1. It should be mentioned that the results are based on 25 independent runs for functions
f1 to
f15, with a population size set at 40 and the maximum number of iterations fixed at 1000. In these experiments, the basic versions of the selected algorithms are considered without further modification. All methods codes are obtained from different sources, and adjusted to be harmonic with our work objectives [
18,
28,
93].
7. Further Tests Using Nonlinear Constrained Engineering Applications
After testing the methods with fifteen unconstrained high-dimensional benchmark functions, four non-smooth constrained engineering design GO problems were selected to examine the effectiveness of these methods in practice and identify their advantages and drawbacks. These comprised four structural design applications, involving the Welded Beam Design (WBD), the Tension/Compression Spring Design (TSD), the Pressure Vessel Design (PVD) and the Speed Reducer Design (SRD) [
1]. Several authors in [
1,
15,
95,
96,
97,
98] have solved these problems using different methods such as the hybrid PSO-GA algorithm, the artificial bee colony, etc. All four of these selected constrained engineering problems have been considered to be computationally-expensive black-box problems. The problems chosen have design variables ranging from 3 to 7 with 4, 7, 4 and 11 constraints, respectively. An average of 25 independent runs were performed per problem, with a total of 20,000 NEF in each run. All algorithms were tested with the same stopping conditions to ensure that their convergence rate, efficiency and computation time would be examined using the same parameters.
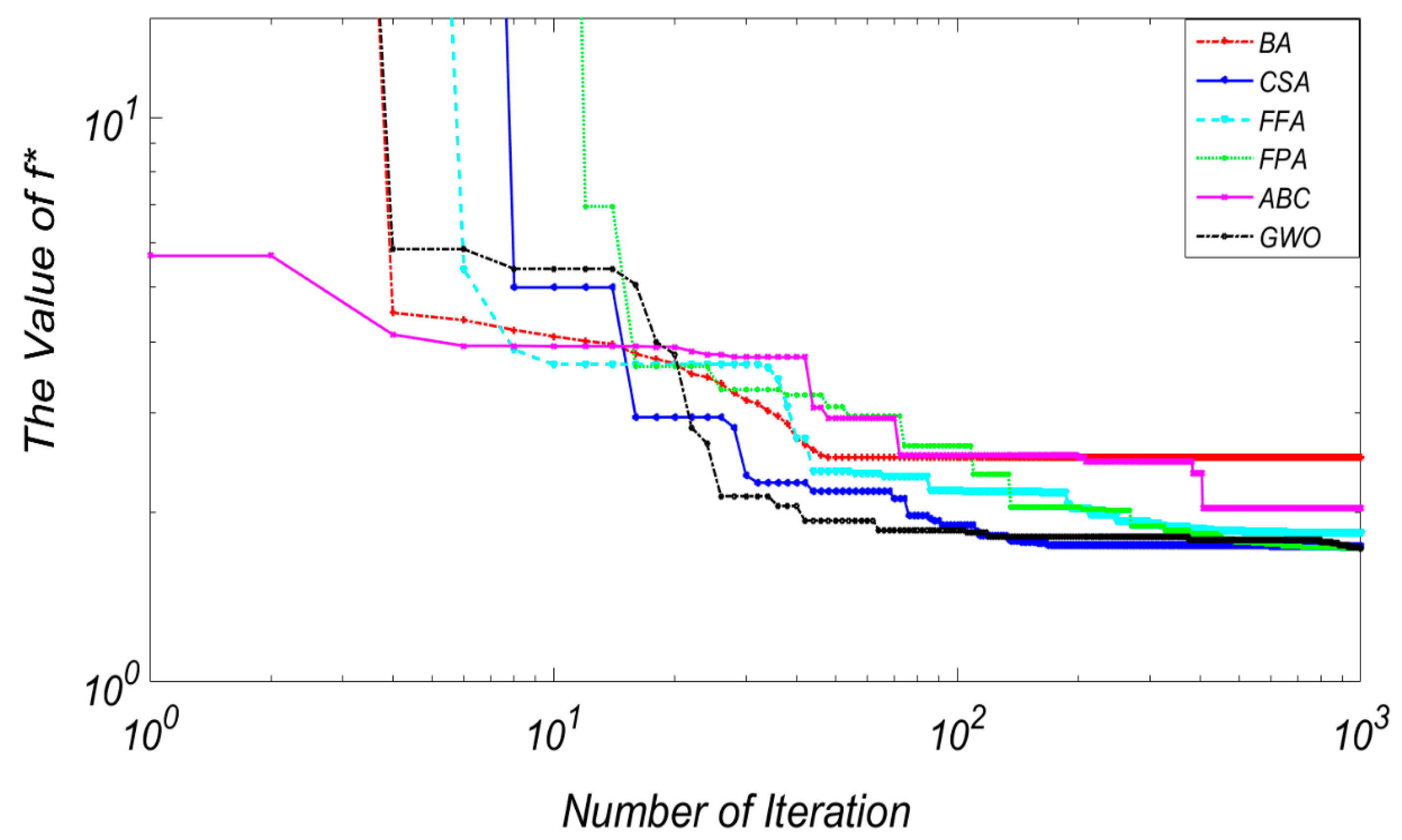
Figure 11 shows the welded beam design problem where ABC started the search with lower function values; however, it required additional time to converge, along with the algorithm, to the global minimum.
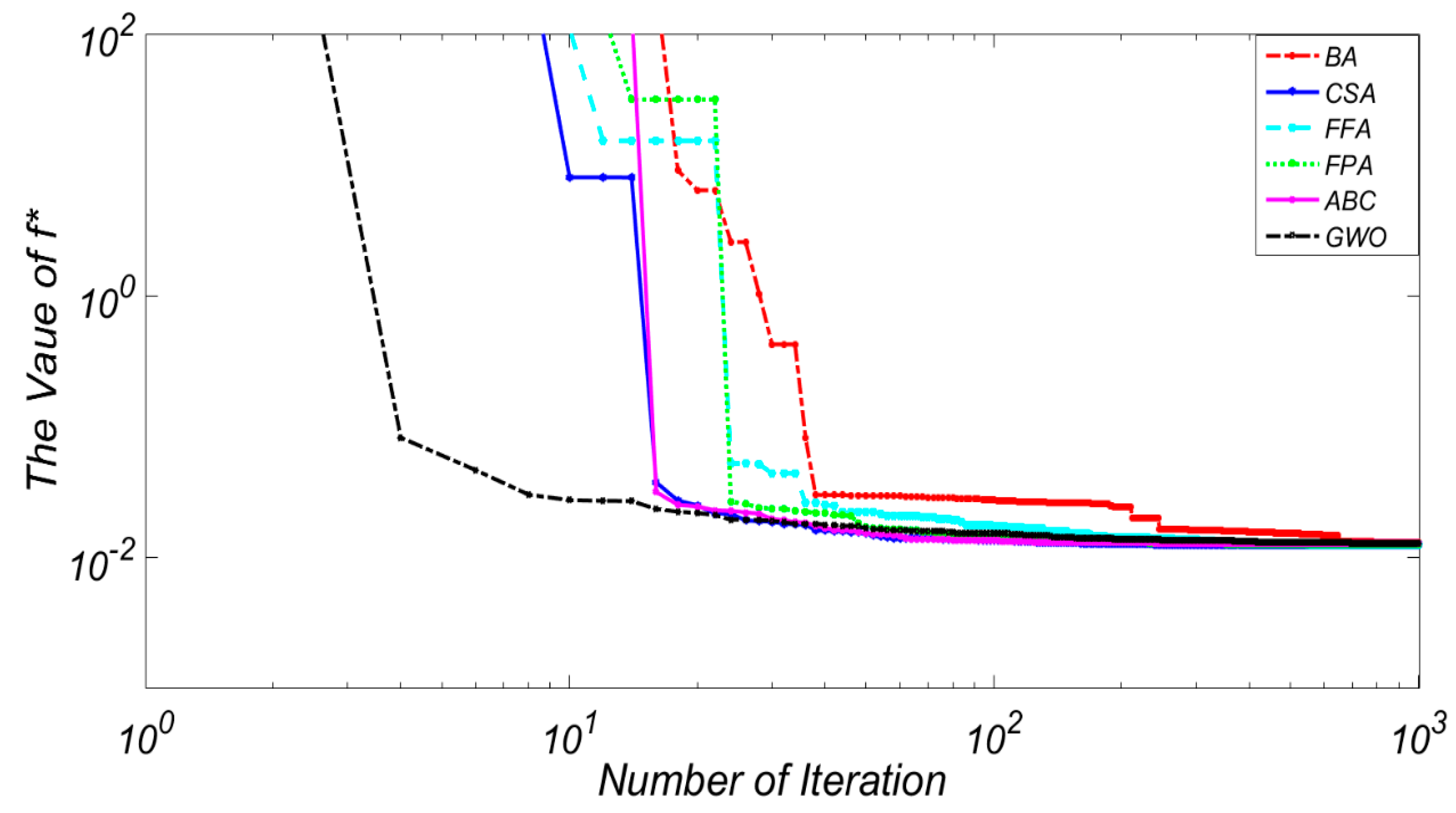
In relation to the tension/compression design problem,
Figure 12 shows that GWO outperformed other optimization algorithms, converging to global solution after only a few NFE. In addition, when compared to the other algorithms, GWO converged to global optimal with the least computation time and yielded better minimum values. In the pressure vessel problem, FPA had the best performance, with the lowest standard deviation value. FPA yielded the best global optimum function value, taking more computation time to converge in comparison to BA which had the lowest CPU time.
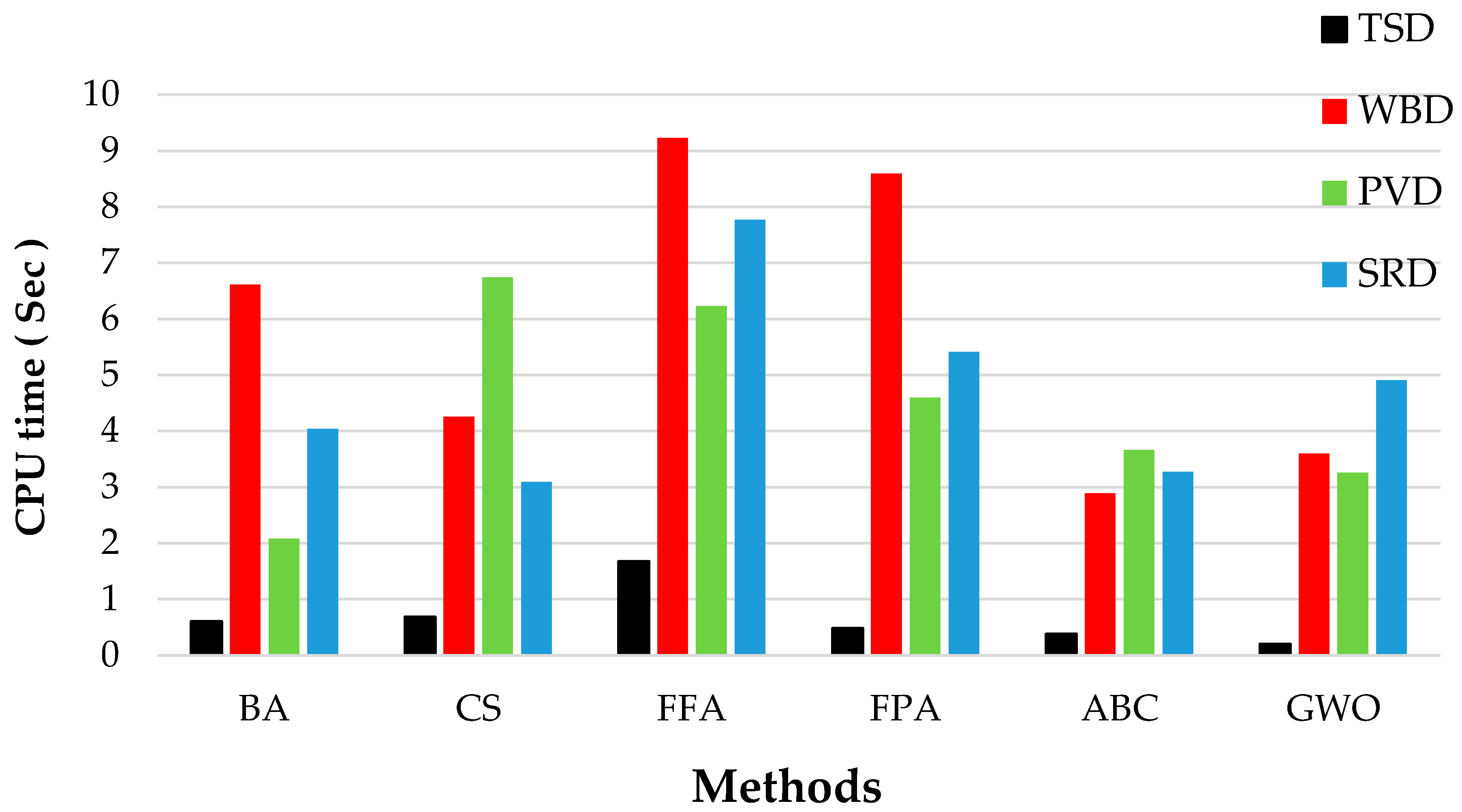
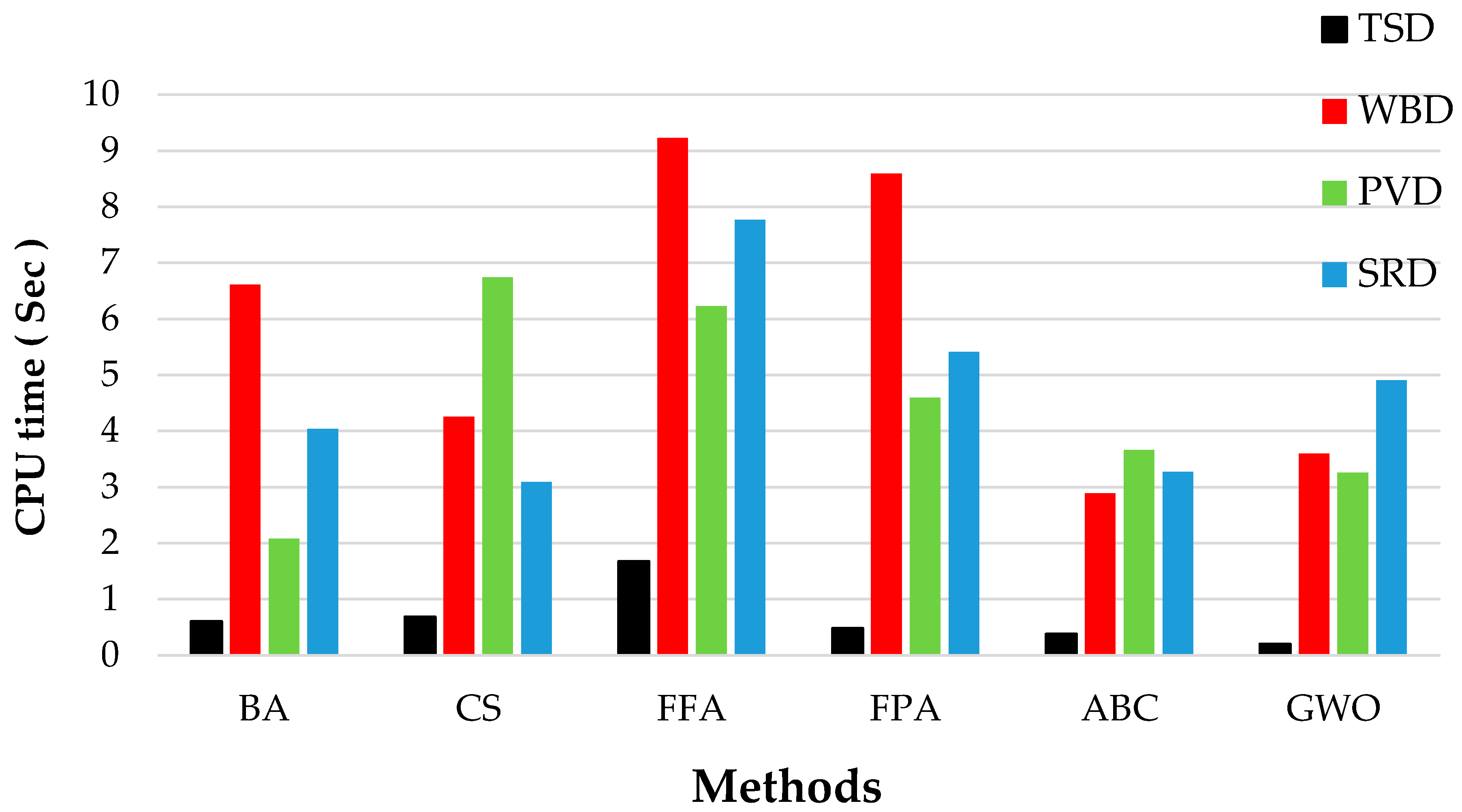
Figure 13 compares the required CPU time in dealing with the four selected constrained optimization problems. The obtained statistical results were analysed and compared to find out the performance of the algorithms when dealing with constrained problems. The results in
Table 5 have shown that:
ABC consistently requires lower NFE than the other algorithms.
GWO performs well in TSD, WBD and PVD cases, but it seems that the GWO needs more iterations to reach the exact global solution in the SRD case.
Results demonstrate that the other tested algorithms are sensitive when the number of variables increases, but they can provide competitive search efficiency in some problems.
We conclude that there is no specific superior optimization algorithm that can perform well for all engineering design problems. Clearly, an algorithm may work well for a specific engineering design problem and fail on another problem. The statistical results obtained are shown in
Table 5.
8. Real-life Application (Cost for Floating Offshore Wind Turbine Support Structures (FOWTs))
Wind energy technology is growing rapidly at commercial scales and is one the mature means of renewable energy generations [
99]. At the coastlines, higher wind speed resources are available and they provide consistent wind power. Therefore, offshore wind turbine technologies require floating platforms to harvest the wind energy in deep waters instead of using fixed structures which are suitable for shallow waters [
100]. This section provides a real life application for a group of optimization algorithms to evaluate FOWTs support structure cost based on the method reported in [
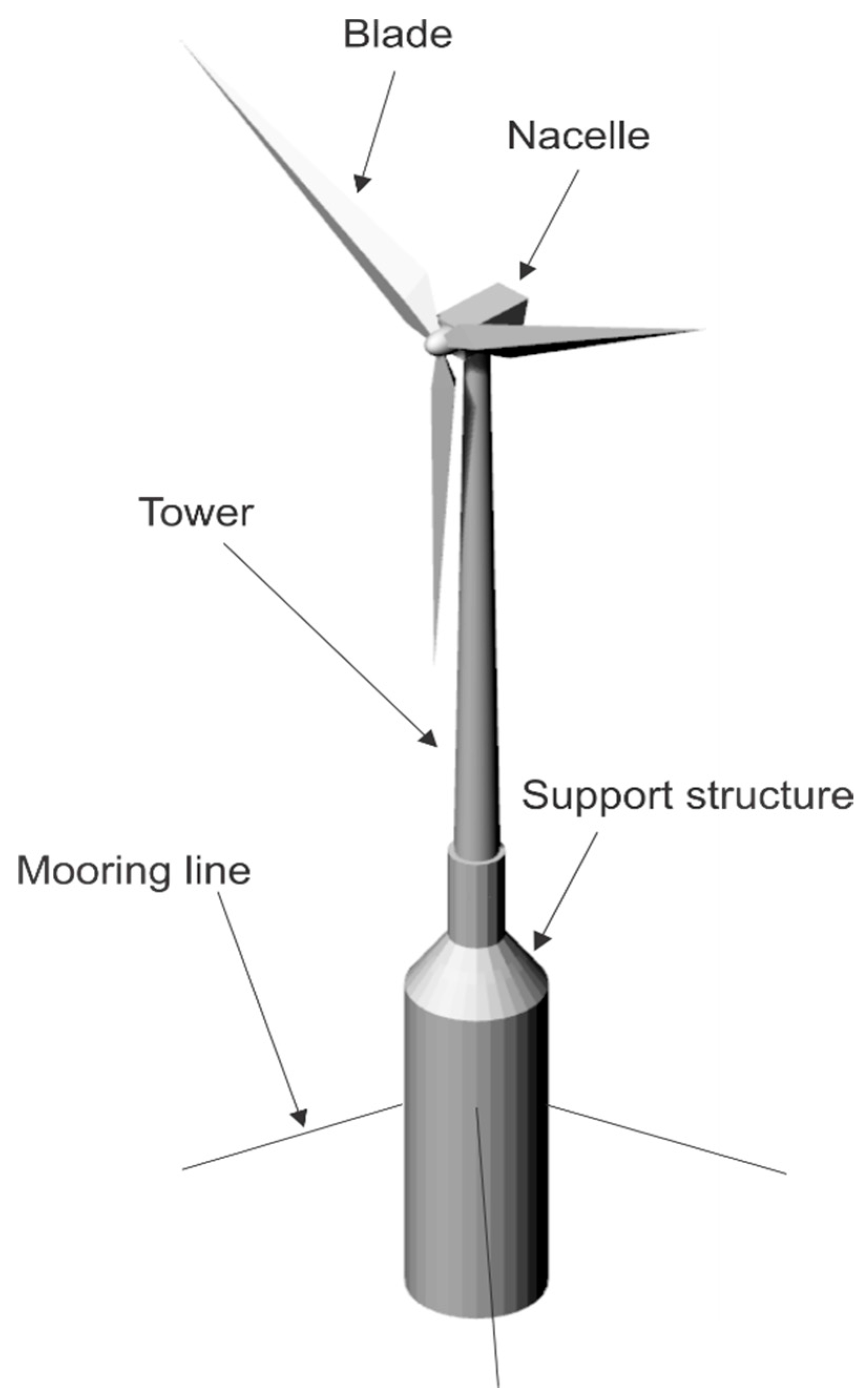
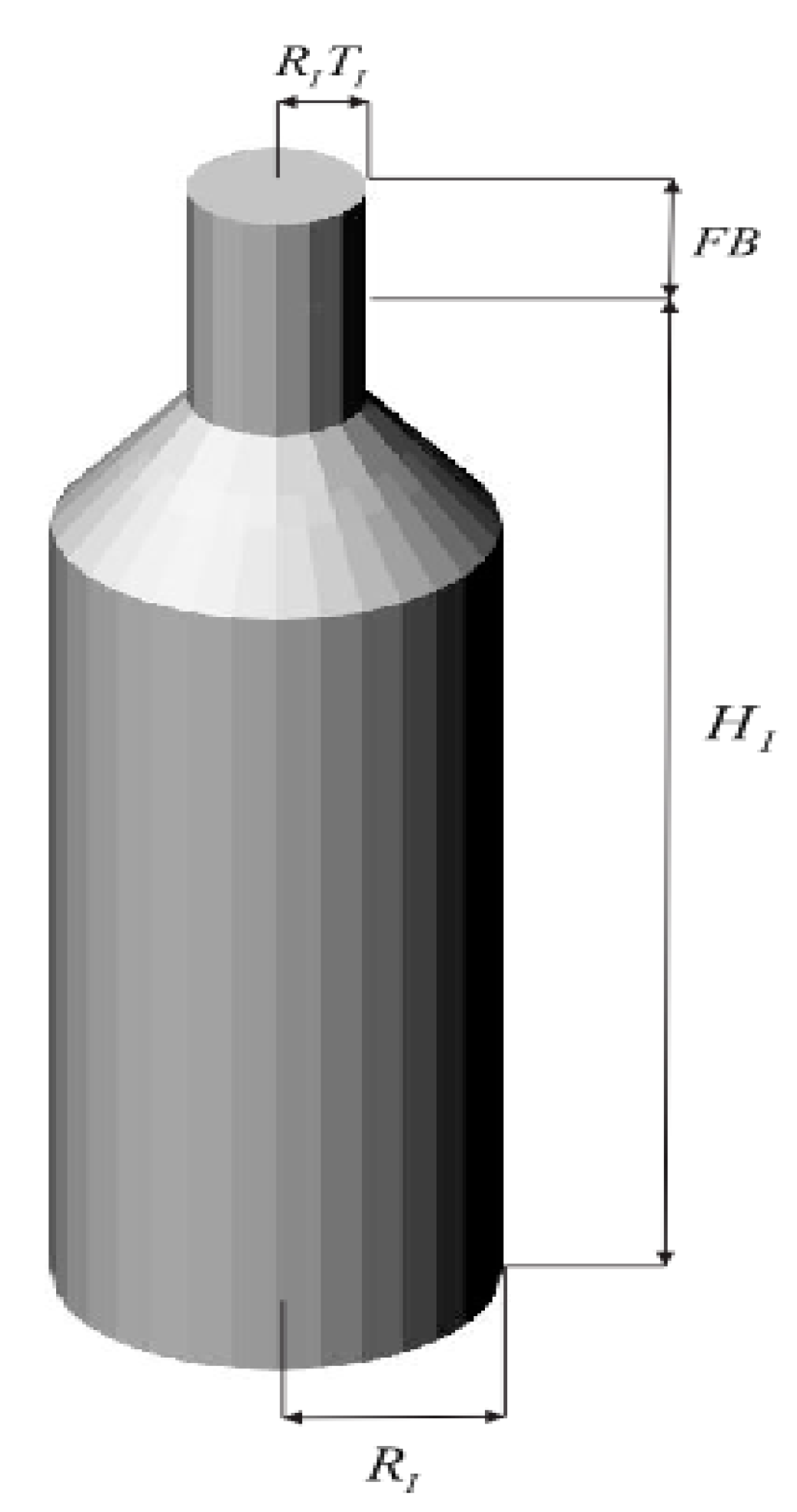
100]. A spar buoy platform is one of the structures that is currently used in offshore wind projects and has been selected in this study for cost analysis as shown in
Figure 14.
The approach used in this paper is to define a design parameterization for the support structure as well as a linearized frequency domain dynamic model which evaluates the stability of the floating system using the NREL 5 MW offshore wind turbine [
100,
101]. The support structure parametrization pattern used in this work provided the spar buoy platforms with a limited number of design variables. Hence, four design parameters are defined to shape the platform and mooring system: a central cylinder with a draft, HI, cylinder radius, RI, top tapper ratio, TI, and a catenary mooring system, XM for spar buoy platforms. Note that a free board (FB) of 5 m is used for all the spar buoy platform designs as a constant parameter. The geometric design variables are summarized in
Table 6 and
Figure 15. In this work, the mooring system design variable, XM defines the angled taut line and slack line configurations for the spar buoy platform. Three lines are used for this platform and they are located at the middle the cylinder height as presented in
Figure 15. The anchor position is defined by the mooring variation of XM from positioning under the platform to the horizontal spread of the lines. The mass properties for each spar buoy platform are determined using the platform and mooring design parameters. The mass of support structure is calculated using a wall thickness of 50 mm using a steel density of 8050 kg/m
3.
In this study, the cost of the FOWT design is defined based on three main components which include the mooring line, the 5 MW wind turbine, and the floating platform. To determine the stability of the floating system in a given environmental condition, the linearized characteristics of the hydrodynamics and aerodynamics of the FOWT must be collected in a frequency domain dynamic model. For floating platform hydrodynamics, the added mass, damping, and hydrostatic loads are calculated using WAMIT. The wind turbine dynamic characteristics are kept constant in this study. However, FAST is used to calculate the linearized dynamic properties for the NREL 5 MW offshore wind turbine. These properties include linearized stiffness, mass, and damping matrices of the offshore wind turbine in a given wind speed. Like the floating platform hydrodynamics, linearized mooring line properties can be added to the frequency domain dynamic model using a quasi-static mooring subroutine of FAST. All the calculated coefficients and loads are collected into a 6 × 6 system stiffness, mass, damping to generate the linearized frequency domain equation of motion for a FOWT Equation (1). The stability of the system is evaluated by calculating the complex response amplitude operator (RAO) for all modes of motion. More details about the dynamic model and platform parameterization can be found in [
101].
The performance of the FOWT in this study is defined as the standard deviation of nacelle acceleration and is shown below:
where
is the wave spectral density, and
is the fore-aft nacelle acceleration response amplitude operator. The complex forms of the nacelle displacement
and nacelle acceleration
are given by Equations (4) and (5):
where
is the wind turbine hub height. In Equations (4) and (5) the
includes the aero dynamic effects of the wind turbine implicitly from the linearized dynamic properties of the wind turbine.
The objective function to optimize in this study is the support structure cost including mooring system, anchor and floating platform costs:
The floating platform cost is defined as a function of the design parameters as shown in
Table 7. In this study, the platform cost contains the materials, manufacturing, and installation costs using a constant cost factor of
$2.5/kg [
100,
101]. The mooring system cost is calculated using the length of the mooring lines and the maximum steady state mooring line tension with a factor of
$0.42/m kN. The anchor cost is the third component of the cost model that includes the installation and technology costs. The drag embedment anchor technology is selected in this study for catenary mooring system. Therefore, the installation cost for each anchor is defined as 100
$/anchor/kN and the technology cost is based on 5000
$/anchor.
In this study, a number of constraints are also applied to the objective function. To avoid expensive design configurations, a constraint limits the cost of the platform to less than
$9 M. The performance metric
is also limited to less than 1. In addition, to avoid the floating platform turning over, the steady state pitch angle of the platform should be less than 10°. The expression of this constraint is given in the following equation:
where
is the steady thrust load,
is the mooring line pitching moment,
is the pitching moment from the ballast mass stabilizers,
is the platform displacement,
is the center of buoyancy of the platform,
is the total mass of the FOWT,
is the center of gravity location,
is the water plane moment of inertia in platform pitch motion,
is the mooring lines stiffness in pitch motion,
is the mooring line stiffness in pitch-surge motions, and
is the fairlead depth in pitch motion. For details of each constraint, the reader is referred to the study presented in [
101].
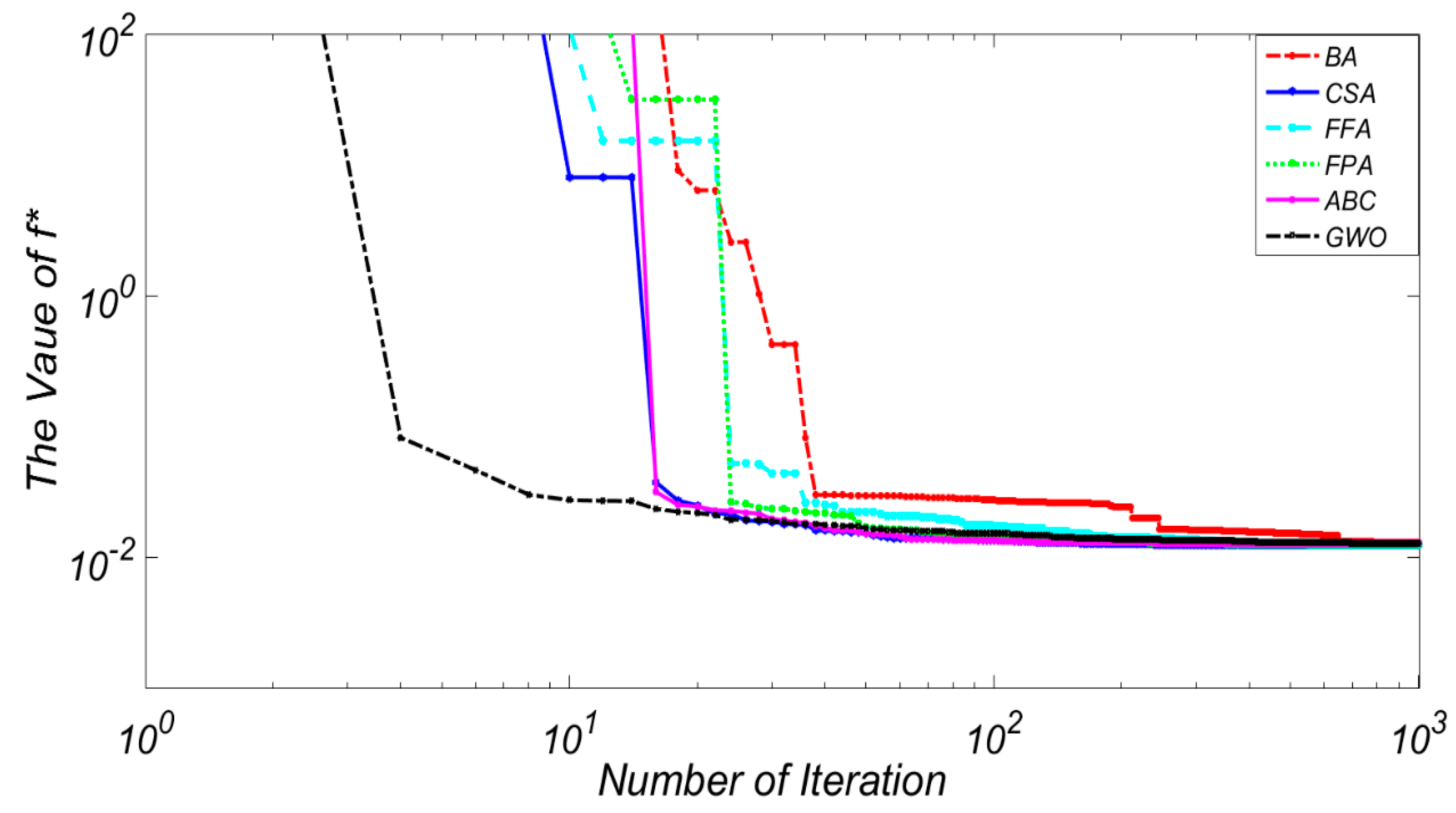
The optimization methods have been tested on this real-life engineering optimization problem. The exploration space for the various platform concepts helps identify the effective cost of structure for FOWTs. In order to obtain solid results, 25 independent runs have been performed. The test results are given in
Table 7 and the convergence history of each method is illustrated in
Figure 16. The ABC method still provides outstanding performance and could find the global optimum within 951 function evaluations of the original functions in this case study. According to the results from previously published performance tests [
101], the obtained optima are sufficiently accurate and the recorded NFEs are much lower.
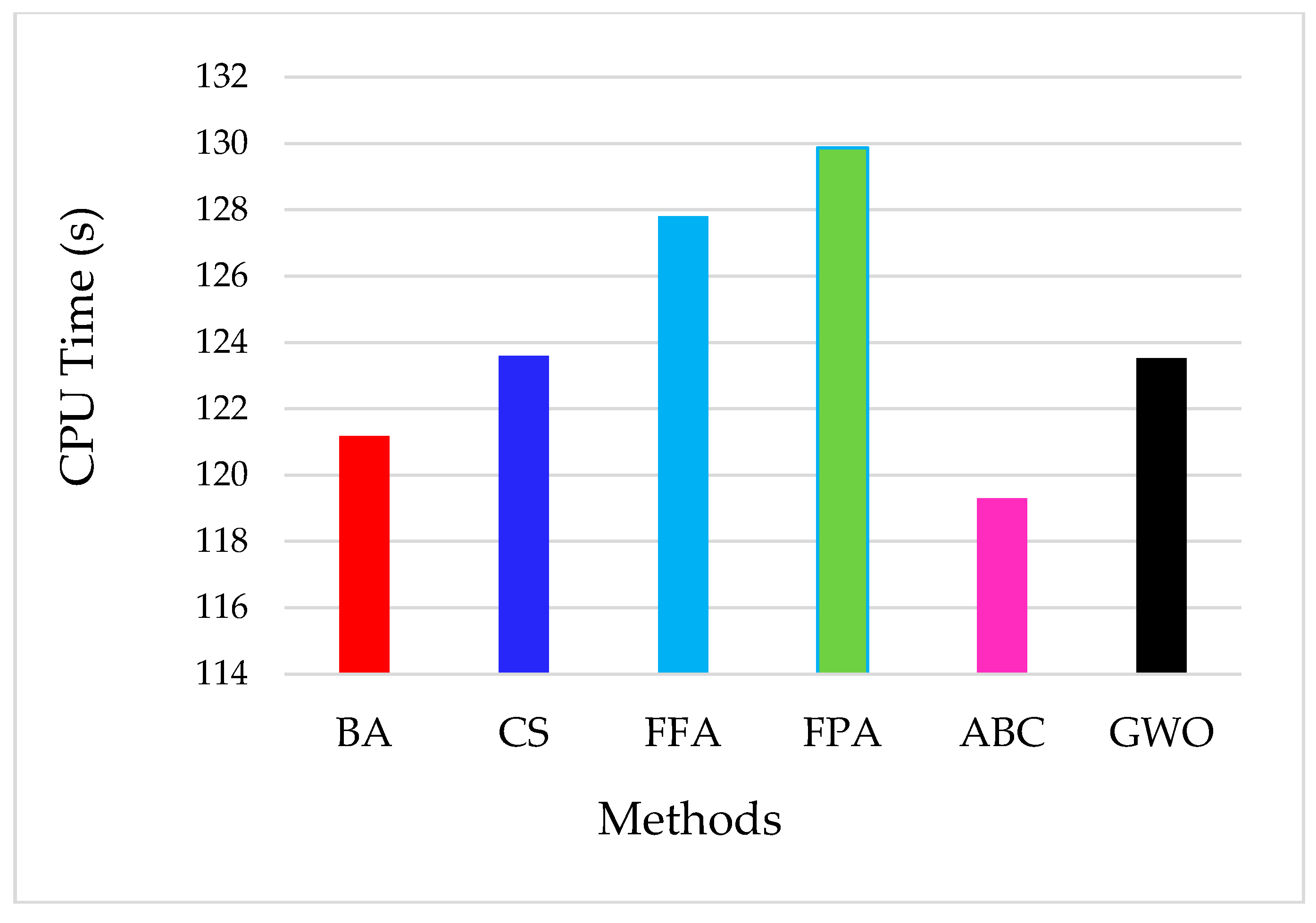
Figure 17 compares the optimization methods in terms of the required CPU time.
9. Conclusions
New and advanced GO algorithms have been continuously introduced to solve complex design optimization problems. These problems are characterized by using computation intensive numerical analyses and simulations as objective and constraint functions with a large number of design variables, forming the so-called computation intensive, black-box GO problems. The relatively new, nature-inspired global optimization methods, Artificial Bee Colony (ABC), Firefly Algorithm (FFA), Cuckoo Search (CS), Bat Algorithm (BA), Flower Pollination Algorithm (FPA) and Grey Wolf Optimizer (GWO), have been introduced to improve search efficiency by reducing the needed number of objective function evaluations and increasing the robustness and accuracy of the results. This study is aimed at gaining a better understanding of the relative overall performance of these six well-known new GO search methods. The systematically conducted comparative study under the same evaluation criteria has quantitatively illustrated each algorithm’s ability to handle a variety of GO problems to enable a user to better select an appropriate GO tool for their specific design applications.
Fifteen high-dimensional, unconstrained benchmark functions with unimodal and multimodal shapes; four constrained engineering optimization problems; and a real-life floating offshore wind turbine design optimization problem have been used to conduct the performance and robustness tests on these newer GO methods. These selected complex benchmark functions and real-life computationally expensive design optimization examples present either convergence or computation challenges.
The GWO and the ABC algorithms have been found most capable in providing the optimal solutions to the high-dimensional GO problems. The main advantages of the GWO method include quick convergence, more accurate results, highly robust, and strong exploration ability over the search space with an overall efficiency of 86%. The ABC method ranks as the second best with an overall efficiency of 80%. The FFA, CS, PFA and BA methods were found to be able to provide competitive results with other well-known algorithms, including SA, GA and PSO. Results from this comparative study show that the ability of these newer global optimization methods to obtain a good solution also declines as the dimension of the problem increases, and each specific application requires a particular type of GO search algorithm. The research contributes to future improvements of global optimization methods.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}