
Toward Personalized Vibrotactile Support When Learning Motor Skills


Abstract
:
1. Introduction
2. Background
3. Vibrotactile Feedback in Motor Skills Training Systems
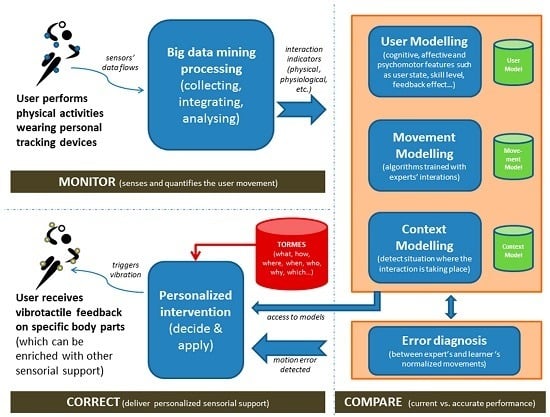
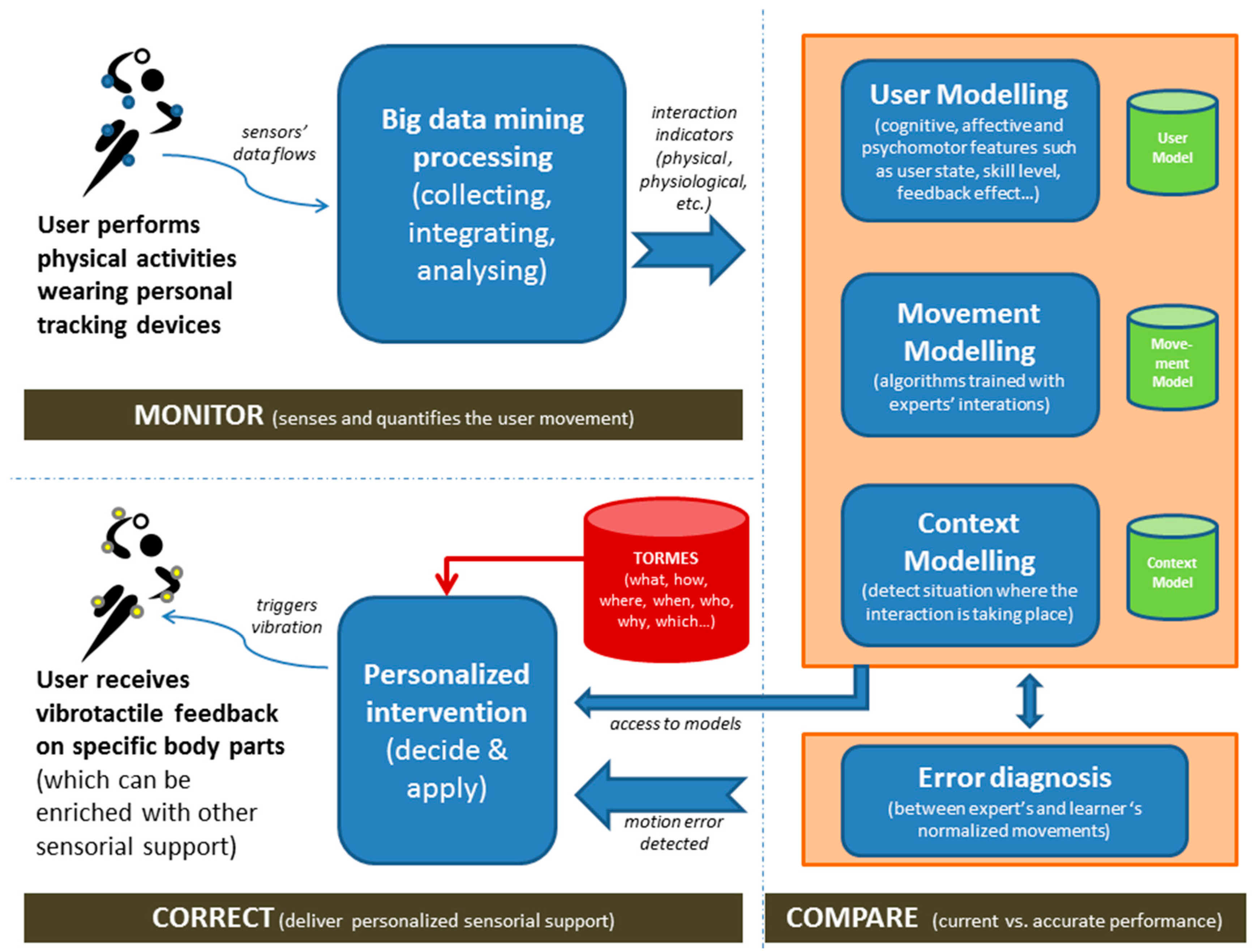
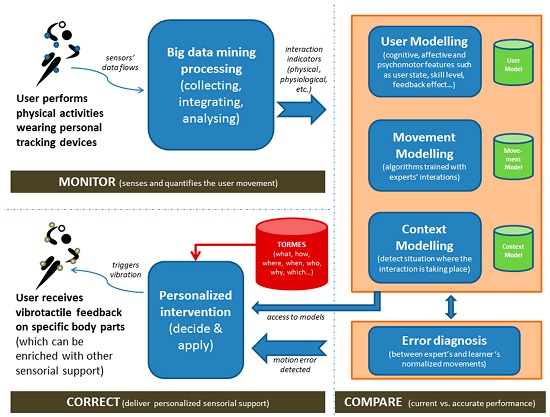
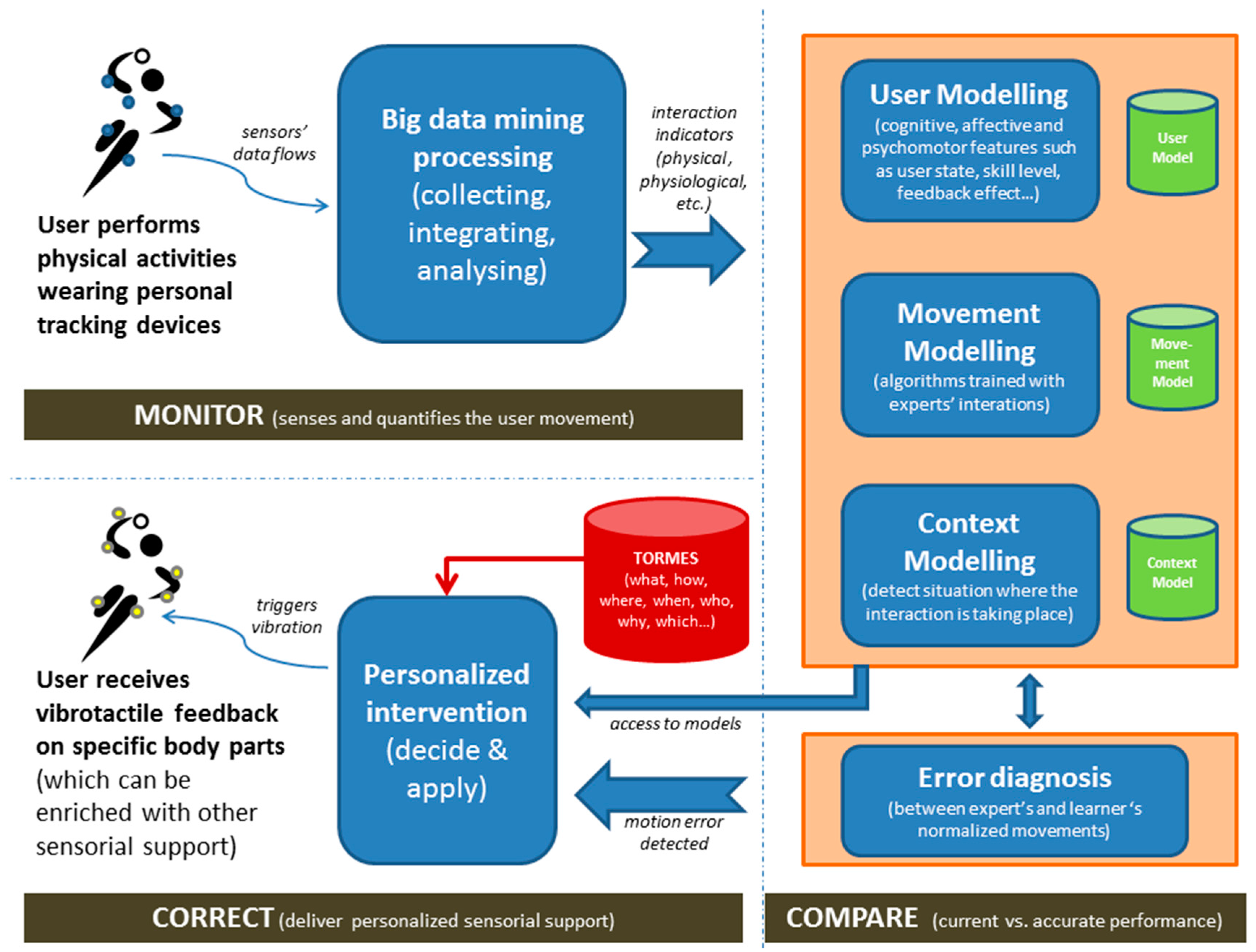
4. A Proposal for Personalized Vibrotactile Feedback to Support Motor Skills Learning
5. Conclusions
Conflicts of Interest
References
- Scheer, K.S.; Siebrant, S.M.; Brown, G.A.; Shaw, B.S.M.; Shaw, I. Wii, Kinect, and Move. Heart Rate, Oxygen Consumption, Energy Expenditure, and Ventilation due to Different Physically Active Video Game Systems in College Students. Int. J. Exerc. Sci. 2014, 7, 22–32. [Google Scholar] [PubMed]
- Tang, R.; Yang, X.-D.; Bateman, S.; Jorge, J.; Tang, A. Physio@Home: Exploring Visual Guidance and Feedback Techniques for Physiotherapy Exercises. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems (CHI ‘15), Seoul, Korea, 18–23 April 2015; pp. 4123–4132.
- Di Tore, P.A.; Raiola, G. Exergames and motor skills learning: A brief summary. Int. Res. J. Appl. Basic Sci. 2012, 3, 1161–1164. [Google Scholar]
- Shank, R.C.; Berman, T.R.; Macpherson, K.A. Learning by Doing. In Instructional-Design Theories and Models: A New Paradigm of Instructional Theory; Reigeluth, C.M., Ed.; Lawrence Erlbaum Associates: Mahwah, NJ, USA, 1999; Volume II, pp. 161–181. [Google Scholar]
- Bruner, J.S. Toward a Theory of Instruction; Harvard University Press: Cambridge, MA, USA, 1966. [Google Scholar]
- Luciani, A.; Cadoz, C. (Eds.) Enaction and Enactive Interfaces: A Handbook of Terms; Enactive System Books: Grenoble, France, 2007.
- Raymaekers, C. Special issue on enactive interfaces. Interact. Comput. 2009, 21, 1–2. [Google Scholar] [CrossRef]
- Soderstrom, N.C.; Bjork, R.A. Learning Versus Performance: An Integrative Review. Perspect. Psychol. Sci. 2015, 10, 176–199. [Google Scholar] [CrossRef] [PubMed]
- Santos, O.C. Training the Body: The Potential of AIED to support Personalized Motor Skills Learning. Int. J. Artif. Intell. Educ. 2016, 26, 730–755. [Google Scholar] [CrossRef]
- Santos, O.C.; Boticario, J.G. Practical guidelines for designing and evaluating educationally oriented recommendations. Comput. Educ. 2015, 81, 354–374. [Google Scholar] [CrossRef]
- Sigrist, R.; Rauter, G.; Riener, R.; Wolf, P. Augmented visual, auditory, haptic, and multimodal feedback in motor learning: A review. Psychon. Bull. Rev. 2013, 20, 21–53. [Google Scholar] [CrossRef] [PubMed]
- Alahakone, A.U.; Senanayake, S.M.N.A. Vibrotactile feedback systems: Current trends in rehabilitation, sports and information display. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 1148–1153.
- Bark, K.; Hyman, E.; Tan, F.; Cha, E.; Jax, S.A.; Buxbaum, L.J.; Kuchenbecker, K.J. Effects of Vibrotactile Feedback on Human Learning of Arm Motions. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 51–63. [Google Scholar] [CrossRef] [PubMed]
- Ahmaniemi, T.; Marila, J.; Lantz, V. Design of Dynamic Vibrotactile Textures. IEEE Trans. Haptics 2010, 3, 245–256. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.Z.-H.; Wong, D.W.-C.; Lam, W.K.; Wan, A.H.-P.; Lee, W.C.-C. Balance Improvement Effects of Biofeedback Systems with State-of-the-Art Wearable Sensors: A Systematic Review. Sensors 2016, 16, 434. [Google Scholar] [CrossRef] [PubMed]
- Lieberman, J.; Breazeal, C. TIKL: Development of a Wearable Vibrotactile Feedback Suit for Improved Human Motor Learning. IEEE Trans. Robot. 2007, 23, 919–926. [Google Scholar] [CrossRef]
- Bloomfield, A.; Badler, N. Virtual Training via vibrotactile arrays. Teleoper. Virtual Environ. 2008, 17, 103–120. [Google Scholar] [CrossRef]
- Portillo-Rodriguez, O.; Sandoval-Gonzalez, O.; Ruffaldi, E.; Leonardi, R.; Avizzano, C.; Bergamasco, M. Real-time gesture recognition, evaluation and feed-forward correction of a multimodal Tai-Chi platform. Lect. Notes Comput. Sci. 2008, 5270, 30–39. [Google Scholar]
- Spelmezan, D.; Schanowski, A.; Borchers, J. Wearable automatic feedback devices for physical activities. In Proceedings of the Fourth International Conference on Body Area Networks, Los Angeles, CA, USA, 1–3 April 2009.
- Miaw, D.; Raskar, R. Second Skin: Motion capture with actuated feedback for motor learning. In Proceedings of the IEEE Virtual Reality Conference, Waltham, MA, USA, 20–24 March 2010; pp. 289–290.
- Van der Linden, J.; Schoonderwaldt, E.; Bird, J.; Johnson, R. MusicJacket—Combining Motion Capture and Vibrotactile Feedback to Teach Violin Bowing. IEEE Trans. Instrum. Meas. 2011, 60, 104–113. [Google Scholar] [CrossRef]
- Bloom, B.S.; Engelhart, M.D.; Furst, E.J.; Hill, W.H.; Krathwohl, D.R. Taxonomy of educational objectives: The classification of educational goals. In Handbook I: Cognitive Domain; Longman: New York, NY, USA, 1956. [Google Scholar]
- Fairclough, S.H.; Gilleade, K.M. Construction of the biocybernetic loop: A case study. In Proceedings of the 14th ACM International Conference on Multimodal Interaction, Santa Monica, CA, USA, 22–26 October 2012; pp. 571–578.
- Mukhopadhyay, S.C. Wearable Sensors for Human Activity Monitoring: A Review. IEEE Sens. J. 2015, 15, 1321–1330. [Google Scholar] [CrossRef]
- Swan, M. The Quantified Self: Fundamental Disruption in Big Data Science and Biological Discovery. BIG DATA 2013, 1, 85–99. [Google Scholar] [CrossRef] [PubMed]
- Shmueli, G. Analyzing Behavioral Big Data: Methodological, Practical, Ethical, and Moral Issues. Qual. Eng. 2017, 29, 57–74. [Google Scholar]
- Fan, W.; Bifet, A. Mining big data: Current status, and forecast to the future. SIGKDD Explor. Newsl. 2013, 14, 1–5. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, X.; Wu, G.Q.; Ding, W. Data mining with big data. IEEE Trans. Knowl. Data Eng. 2014, 26, 97–107. [Google Scholar]
- Xu, X.; Sheng, Q.Z.; Zhang, L.; Fan, Y.; Dustdar, S. From Big Data to Big Service. Computer 2015, 48, 80–83. [Google Scholar] [CrossRef]
- Kuflik, T.; Kay, J.; Quigley, A. Preface to the special issue on ubiquitous user modeling and user-adapted interaction. User Model. User Adapt. Interact. 2015, 25, 185–187. [Google Scholar] [CrossRef]
- Santos, O.C. Emotions and Personality in Adaptive e-Learning Systems: An Affective Computing Perspective. In Emotions and Personality in Personalized Systems; Tkalčič, M., De Carolis, B., de Gemmis, M., Odić, A., Košir, A., Eds.; Springer: New York, NY, USA, 2016; pp. 278–279. [Google Scholar]
- Santos, O.C.; Uria-Rivas, R.; Rodriguez-Sanchez, M.C.; Boticario, J.G. An Open Sensing and Acting Platform for Context-Aware Affective Support in Ambient Intelligent Educational Settings. IEEE Sens. J. 2016, 16, 3865–3874. [Google Scholar] [CrossRef]
- Santos, O.C. Beyond Cognitive and Affective Issues: Designing Smart Learning Environments for Psychomotor Personalized Learning. In Learning, Design, and Technology; Springer: New York, NY, USA, 2016; pp. 1–24. [Google Scholar]
- Santos, O.C. Education still needs Artificial Intelligence to support Personalized Motor Skill Learning: Aikido as a case study. Workshop on Les Contes du Mariage: Should AI stay married to Ed? In Proceedings of the 17th International Conference on Artificial Intelligence in Education (AIED 2015), Madrid, Spain, 22–26 June 2015; pp. 72–81.
- Nye, B.D. ITS, The End of the World as We Know It: Transitioning AIED into a Service-Oriented Ecosystem. Int. J. Artif. Intell. Educ. 2016, 26, 756–770. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| System Details | Monitoring | Comparing | Correcting | Personalization Issues |
|---|---|---|---|---|
| TIKL Lieberman and Breazeal, 2007 [16] Body part: arm Activity: sports training, motor rehabilitation, dance, postural retraining… | Sensors: optical motion capture system (Vicon). Processing approach: Vicon software computes 3D skeletal models. Measures: joint angles and positions (wrist flexion/extension, wrist abduction/adduction, forearm rotation, elbow flexion/extension, upper arm rotation). | User modelling: - Movement modelling: - Context modelling: - Error diagnosis: ad hoc software that compares student’s and teacher’s performance. A proportionality constant is used to allow typical movement levels for each joint. | Actuators: tactors (from Tactaid) placed at quadrants around the joint so that the vibration direction is perpendicular to the skin. Feedback: joints moving in error receive vibrations (changing amplitude and frequency) proportional to the amount of error till position is corrected. Sensory saltation phenomenon used to simulate continuously the rotation signal with the four actuators in each joint. | Calibration routine in Vicon software as users have different joint lengths and offsets (so user can be matched to the skeletal template). |
| PHANToM Bloomfield and Badler, 2008 [17] Body part: arm Activity: karate | Sensors: infrared motion capture system (Reactor by ATC). Processing approach: body pose in 3D space provided by the motion capture system. Measures: angle of wrist (wrist rotation), position of elbow and wrist. | User modelling: - Movement modelling: relative to the shoulder, requires holding the position for 15 seconds, assumes that the user is facing the screen. Context modelling: - Error diagnosis: positional differences in a given range of elbow and wrist with correct position and scaled angular difference of wrist rotation with correct rotation selects the frame (in the 15 seconds period) with the lowest average distance. | Actuators: sleeve of tactors (vibrotactile arrays) with four rings of four tactors each in the forearm and upper arm plus eight on the hand. Feedback: Guides the user to correct her body pose (correct position and rotation of the arm) by stimulating appropriate tractors with on/off relay boards (frequency variable, amplitude fixed). Indicates which part of the arm needs to be moved. One tactor: move away from that direction; four tactors: turn in the rotation direction. | Forearm and upper arm lengths and rotation angle are normalized before they are compared. |
| Multimodal Tai Chi Platform Portillo-Rodriguez et al., 2008 [18] Body part: hands Activity: tai-chi | Sensors: optical motion capture system (Vicon). Processing approach: gesture recognition system (probabilistic neural network and finite state machine). Measures: not specified. | User modelling: - Movement modelling: eighteen variables: twelve angles (elbows, wrists and shoulders), two distances (hands, elbows), four positional vectors (hands-chest, elbows-chest). Context modelling: - Error diagnosis: motion analysis compares expert’s (pattern) and student’s movements and obtains error values. | Actuators: wireless vibrotactile device (SHAKE), 3D sound system and XVR graphical scenario. Feedback: multimodal feedback (audio–visual–tactile) to correct errors with feed-forward strategy (estimates in advance the next correction values to compensate user’s perceived delays). Multimodality: -audio: pitch and volume to indicate where the error is located and its intensity. -visual: energy line showing distance error of the hands in the virtual environment representation. -tactile: vibrations at different frequencies depending on error distance of hands. | Calibration process to adjust the kinematics model (placed at position ‘stand and attention’). Normalized factor when computing the error. |
| SensAct box Spelmezan et al., 2009 [19] Body part: full body Activity: snowboarding | Sensors: force-sensitive resistor, bend sensor, accelerometer, and inertial measurement unit with digital compass (body vs. board rotation). Processing approach: empirical algorithm. Measures: forces, weight distribution. | User modelling: - Movement modelling: posture classification (turn and edge detection, knee flexion). Context modelling: activity recognition (pause, riding). Error diagnosis: - | Actuators: vibration motors (from Nokia 3210 mobile). Feedback: vibration patterns triggered across the body (ten instructions to indicate how to move) modifying intensity (on/off), duration, spatial-temporal patterns to differentiate between movements. | Calibration (standing on level ground). |
| Second Skin Miaw and Raskar, 2010 [20] Body part: arm Activity: sports training, dance practice, health care | Sensors: infrared motion tracking (extends MERL for 3D tracking). Processing approach: motion tracking system. Measures: limb angles. | User modelling: - Movement modelling: - Context modelling: - Error diagnosis: against the recorded movements of an expert. | Actuators: tactors (AEC). Feedback: Corrects movement and position errors (real-time corrective mode). Vibrational intensity indicates degree of deviation. | Use limb angles instead of absolute positions because it is more tolerant with users of different builds and body structures. |
| MusicJacket van der Linden et al., 2011 [21] Body part: arms and torso Activity: violin playing | Sensors: inertial motion capture suit (Animazoo) with accelerometer, gyroscope and magnetometer. Processing approach: motion capture system processing unit computes the 3D orientation data from each sensor using a hierarchical skeleton model. Measures: inertial values obtained from suit (not specified). | User modelling: - Movement modelling: posture holding the violin and bowing action on target trajectory. Context modelling: - Error diagnosis: bowing and posture parameters compared to individual ideal path obtained in calibration and considering the tolerance margins. | Actuators: seven vibration motors (Precision Microdrives) controlled by Arduino board. Feedback: strong vibration when error (away from desired bowing trajectory of arm position). | The hierarchical skeleton model is specific to the subject being measured. The ideal straight path is individual (user build, way of holding the violin, teachers’ pedagogy) and obtained with calibration (straight bow stroke with correct violin position). Tolerance margins are customized. |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santos, O.C. Toward Personalized Vibrotactile Support When Learning Motor Skills. Algorithms 2017, 10, 15. https://doi.org/10.3390/a10010015
Santos OC. Toward Personalized Vibrotactile Support When Learning Motor Skills. Algorithms. 2017; 10(1):15. https://doi.org/10.3390/a10010015
Chicago/Turabian StyleSantos, Olga C. 2017. "Toward Personalized Vibrotactile Support When Learning Motor Skills" Algorithms 10, no. 1: 15. https://doi.org/10.3390/a10010015
APA StyleSantos, O. C. (2017). Toward Personalized Vibrotactile Support When Learning Motor Skills. Algorithms, 10(1), 15. https://doi.org/10.3390/a10010015