
Young’s Modulus Calculus Using Split Hopkinson Bar Tests on Long and Thin Material Samples


Abstract
:1. Introduction
2. Theory
2.1. Elastic Longitudinal Wave Propagation in Bars
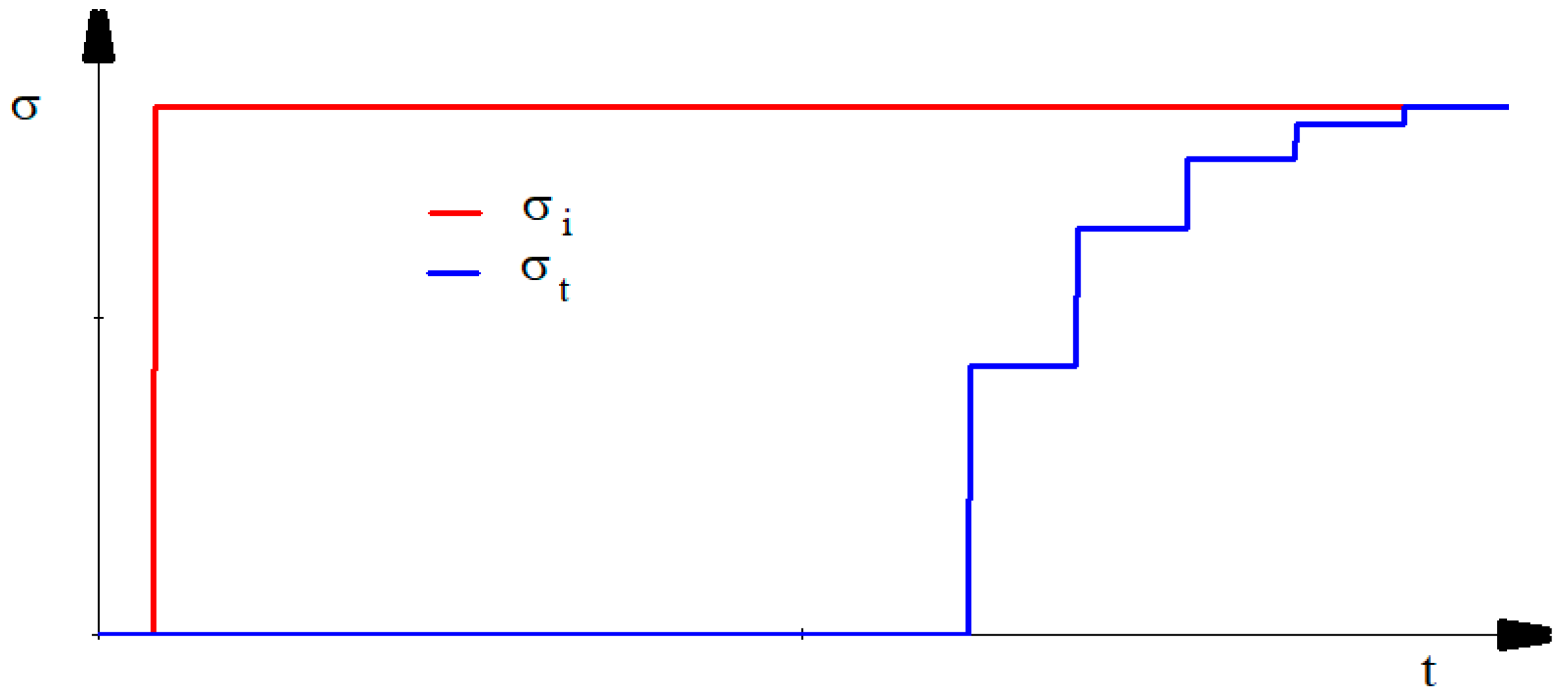
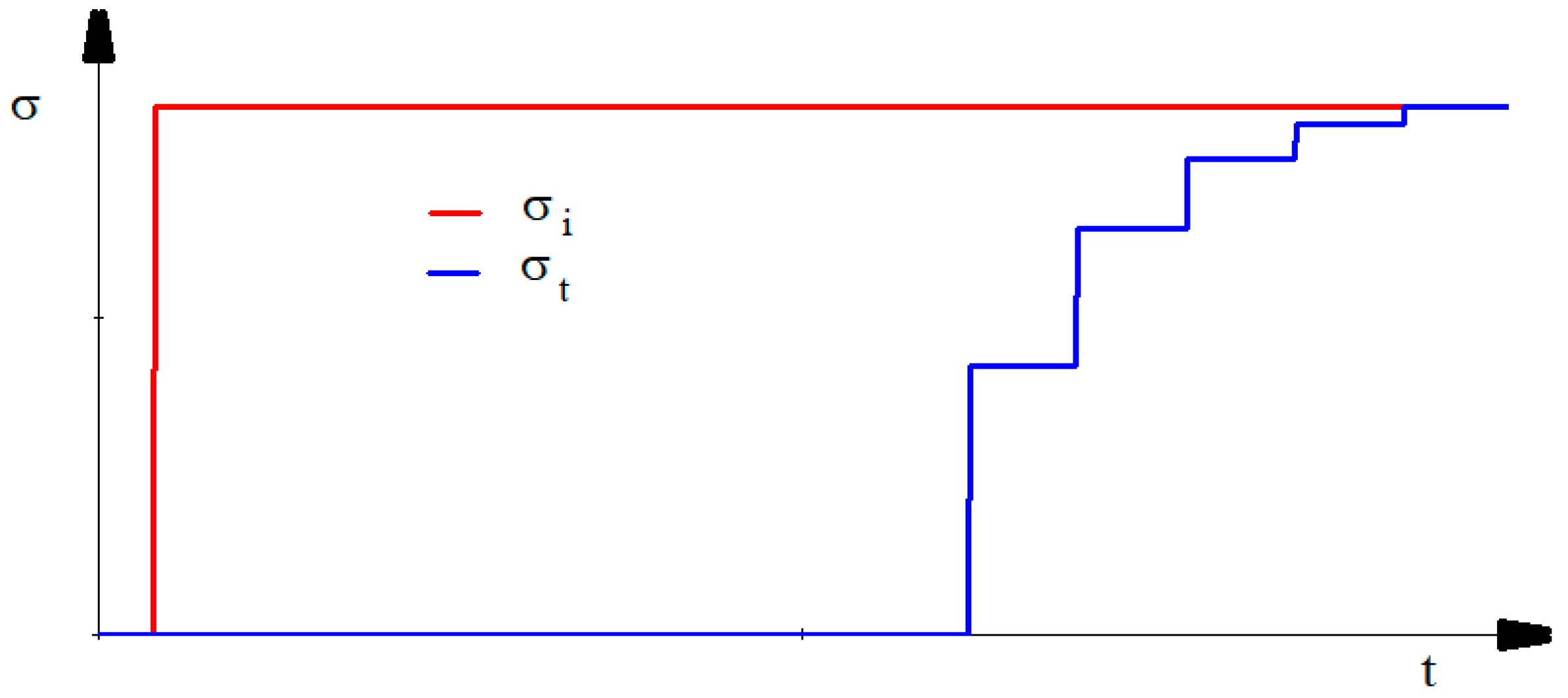
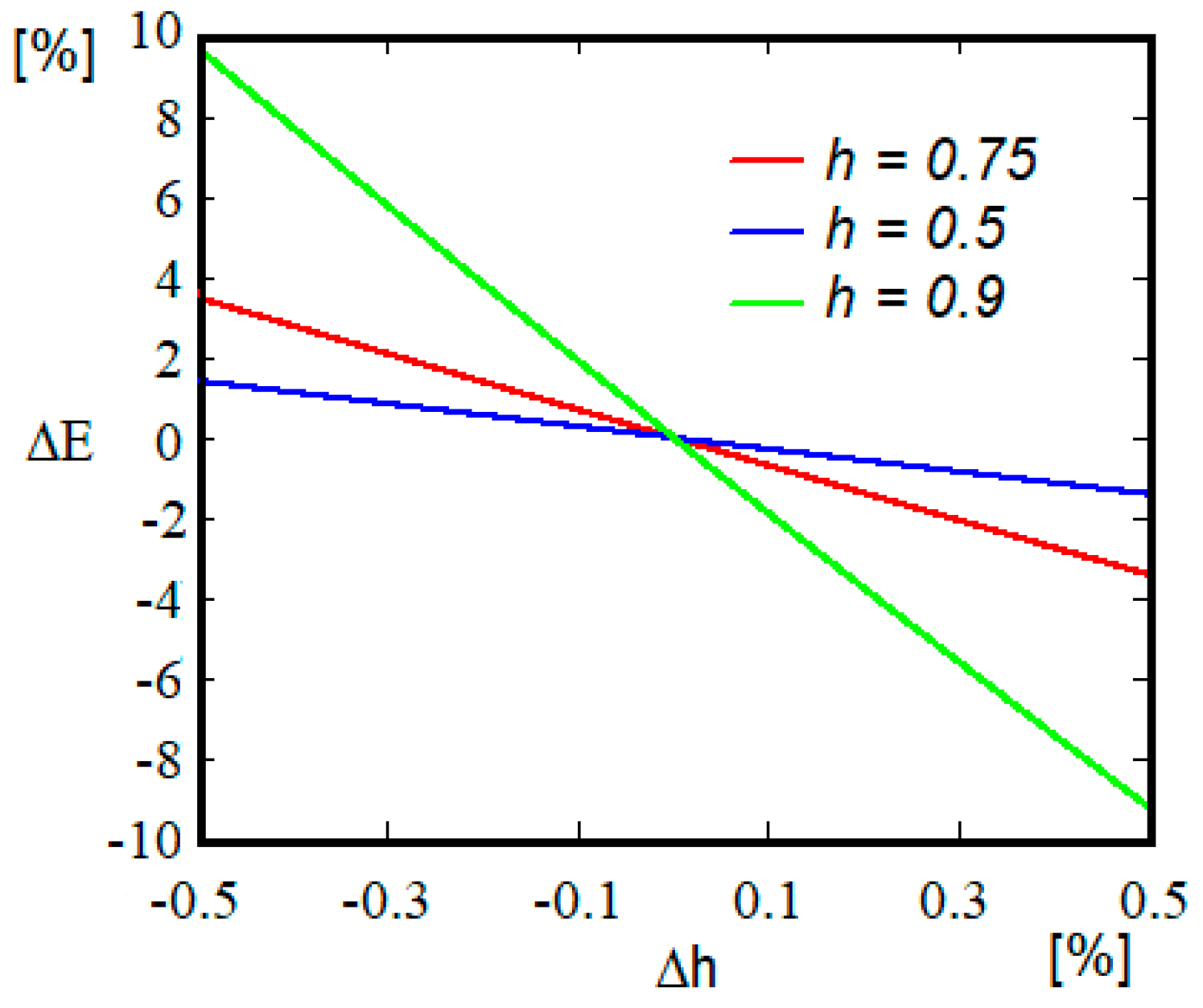
2.2. Influence of Impedance Mismatch on the Longitudinal Wave Propagation in Bars
- For the incident bar/sample interface
- For the sample/transmitter bar interface
3. Experimental Setup and Numerical Model
3.1. Tested Materials
3.2. SHPB Equipment
3.3. Numerical Model
- ➢
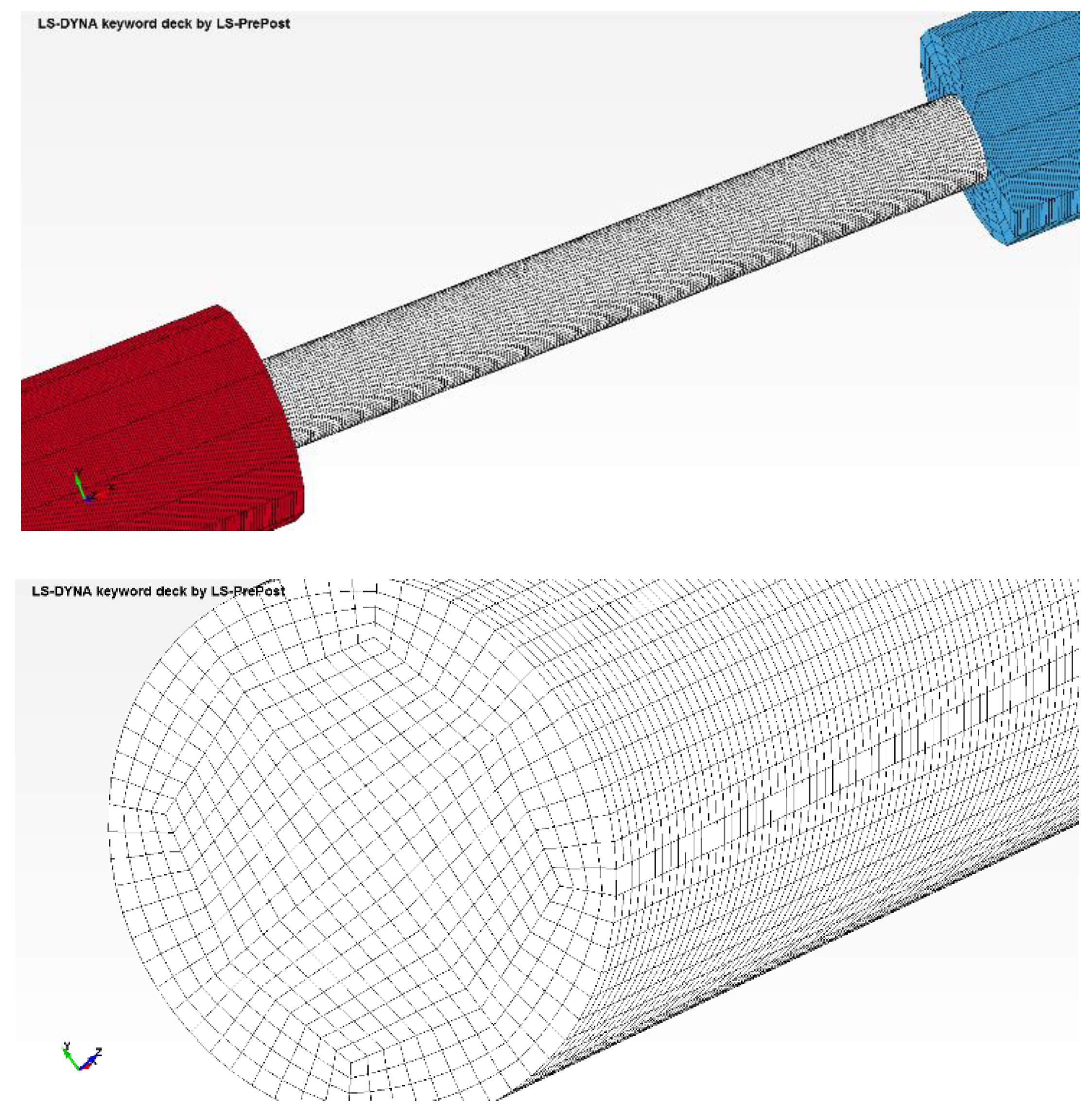
- A 3D modeling approach based on the real dimensions of the bars and samples, and also the real initial and boundaries conditions, is preferable. Both incident and transmitted bars are 20 mm in diameter and 2000 mm in length. The striker length is 385 mm. The specimen has 67.8 mm length and 8.2 mm diameter.
- ➢
- A fine mesh must be imposed for the longitudinal direction in order to capture the real phenomena. Thereby, a 0.25 mm length mesh was considered, a value smaller than the one usually used in mesh sensitivity analyses for similar SHPB tests [21,34,35]. The number of elements and nodes of every component of the SHPB are presented in Table 2.
- ➢
- The contact between parts must be as real as can be simulated which leads to the use of the *CONTACT_AUTOMATIC_SURFACE_TO_SURFACE_ID card. For the initial striker velocity, the *INITIAL_VELOCITY_GENERATION card was used.
4. Results
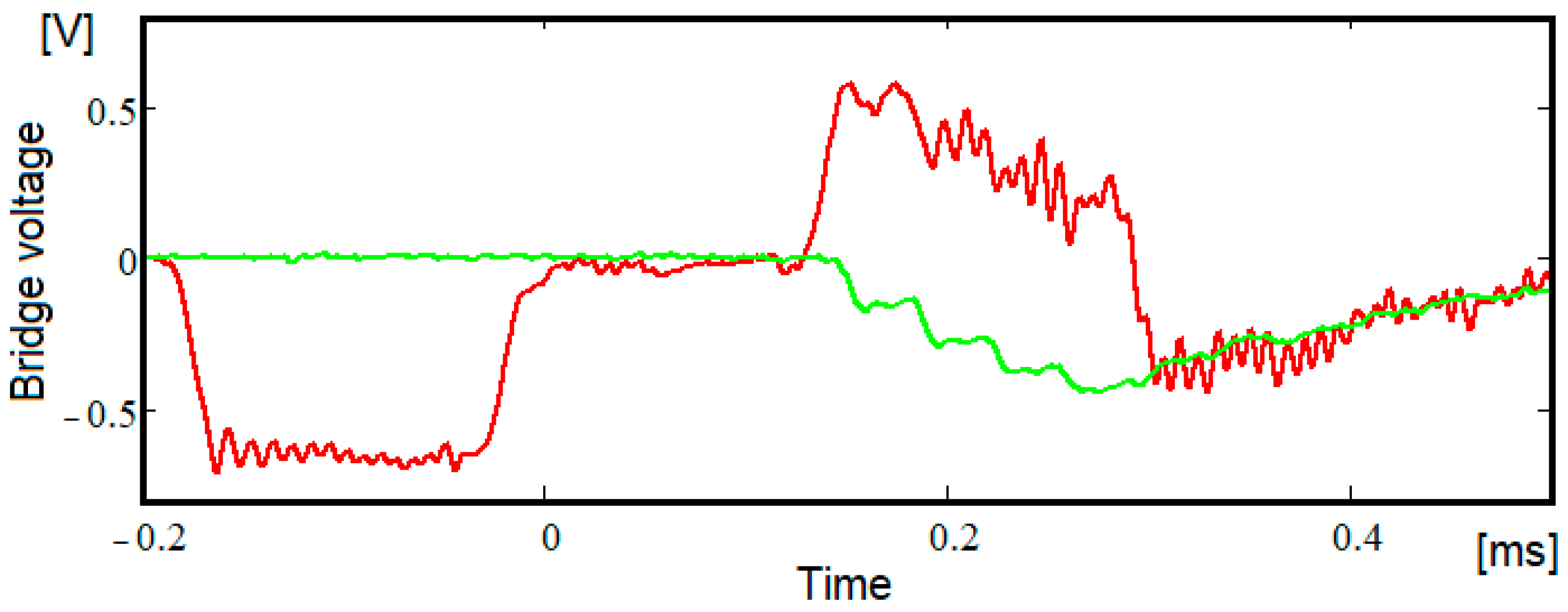
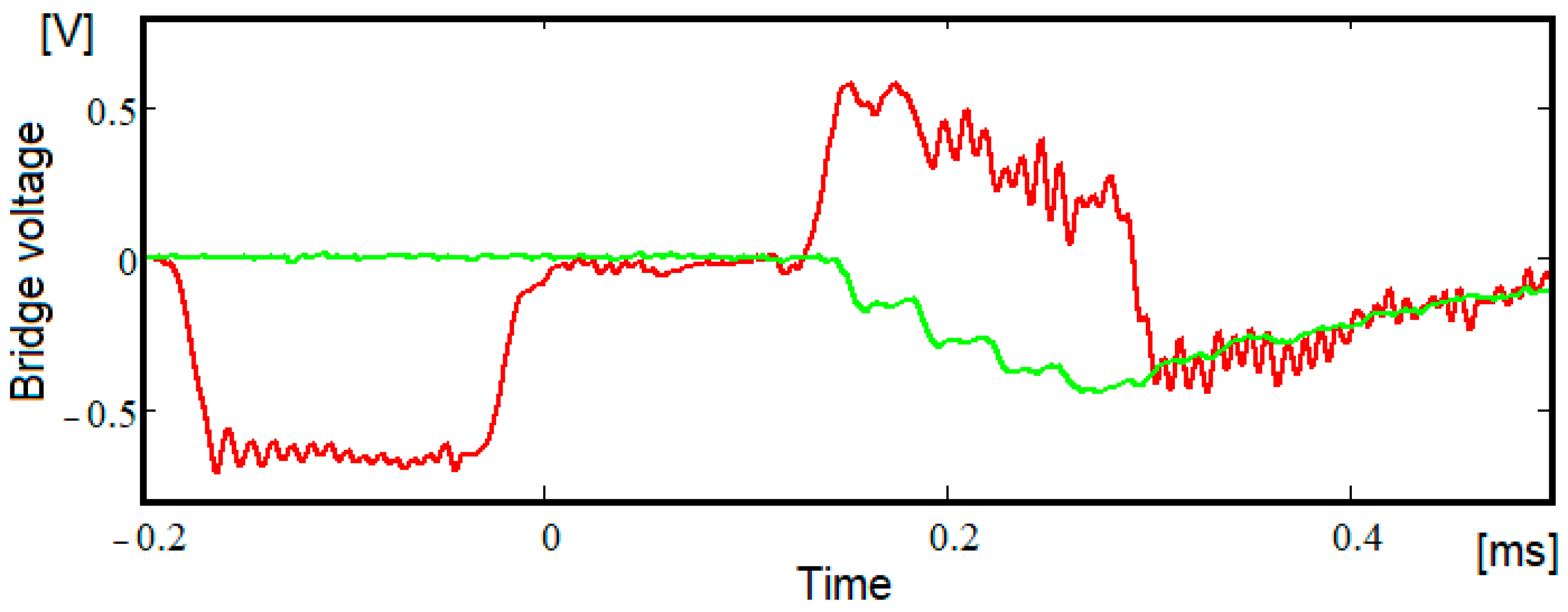
4.1. Measured Data
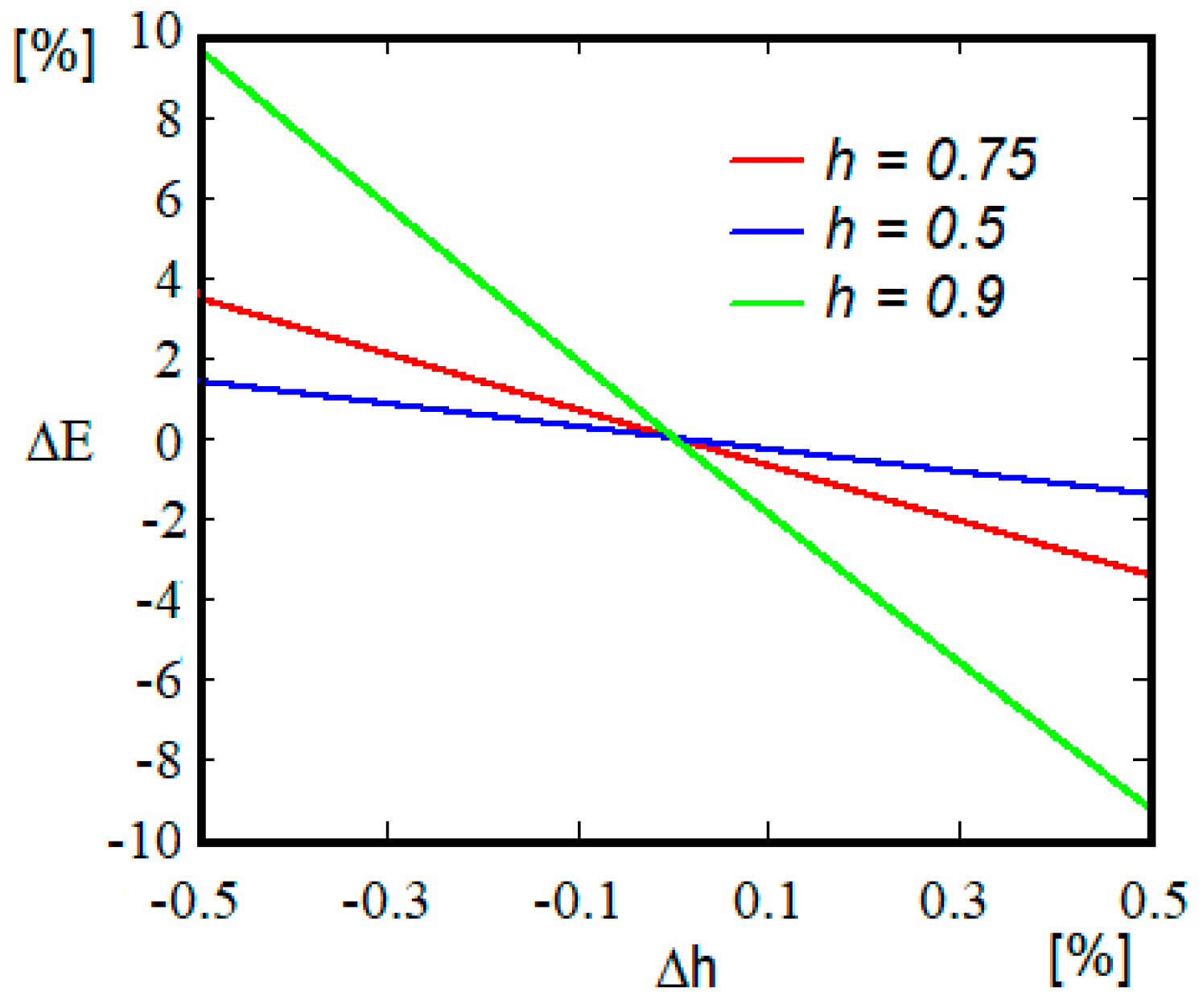
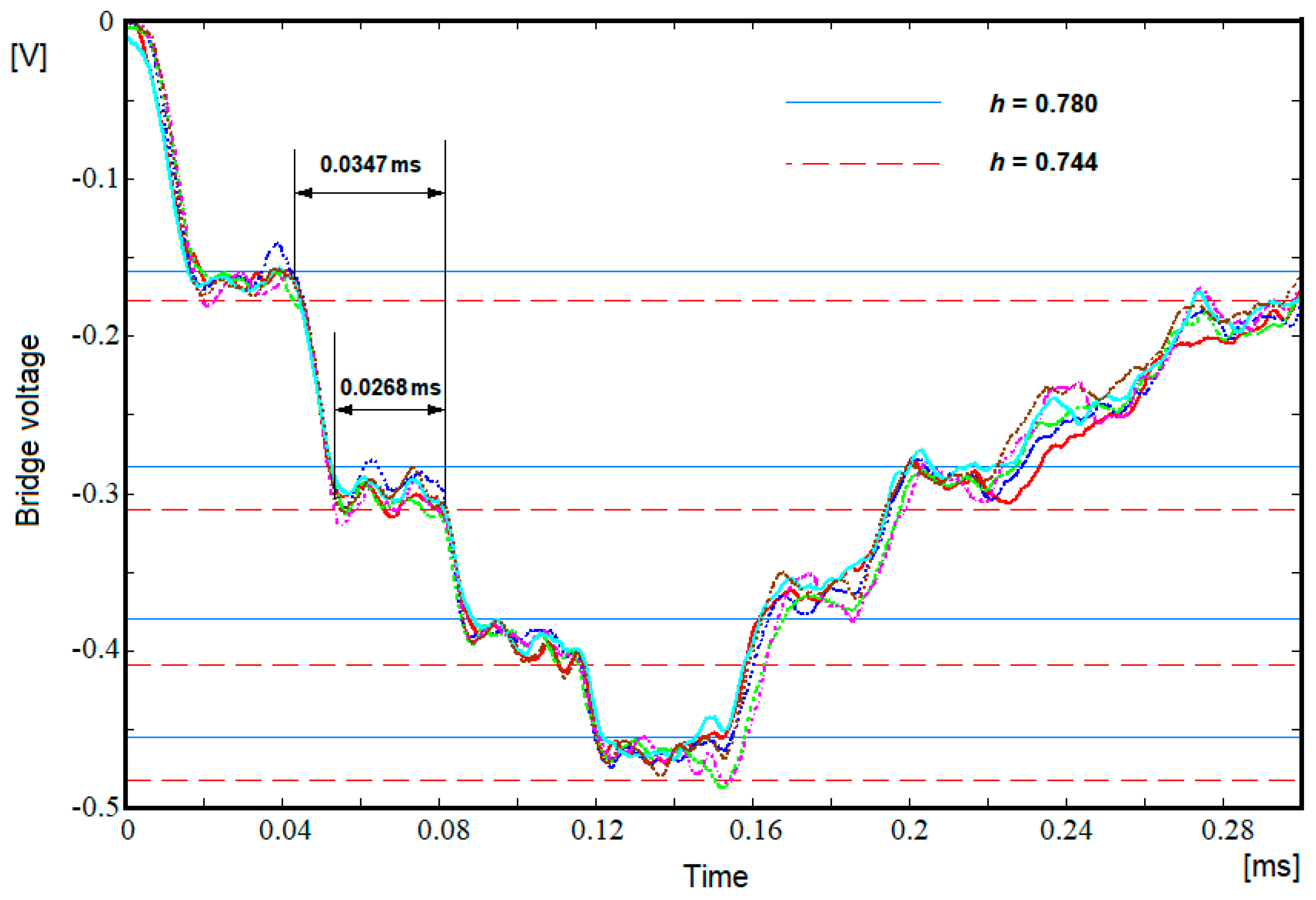
4.2. Methodology for Refining the Value of the Modulus of Elasticity
4.3. Numerical Results
5. Discussions
6. Conclusions
- (a)
- Despite the deduction of an analytical calculation in Formula (12), the real aspect of the acquired data prevents its reliable use;
- (b)
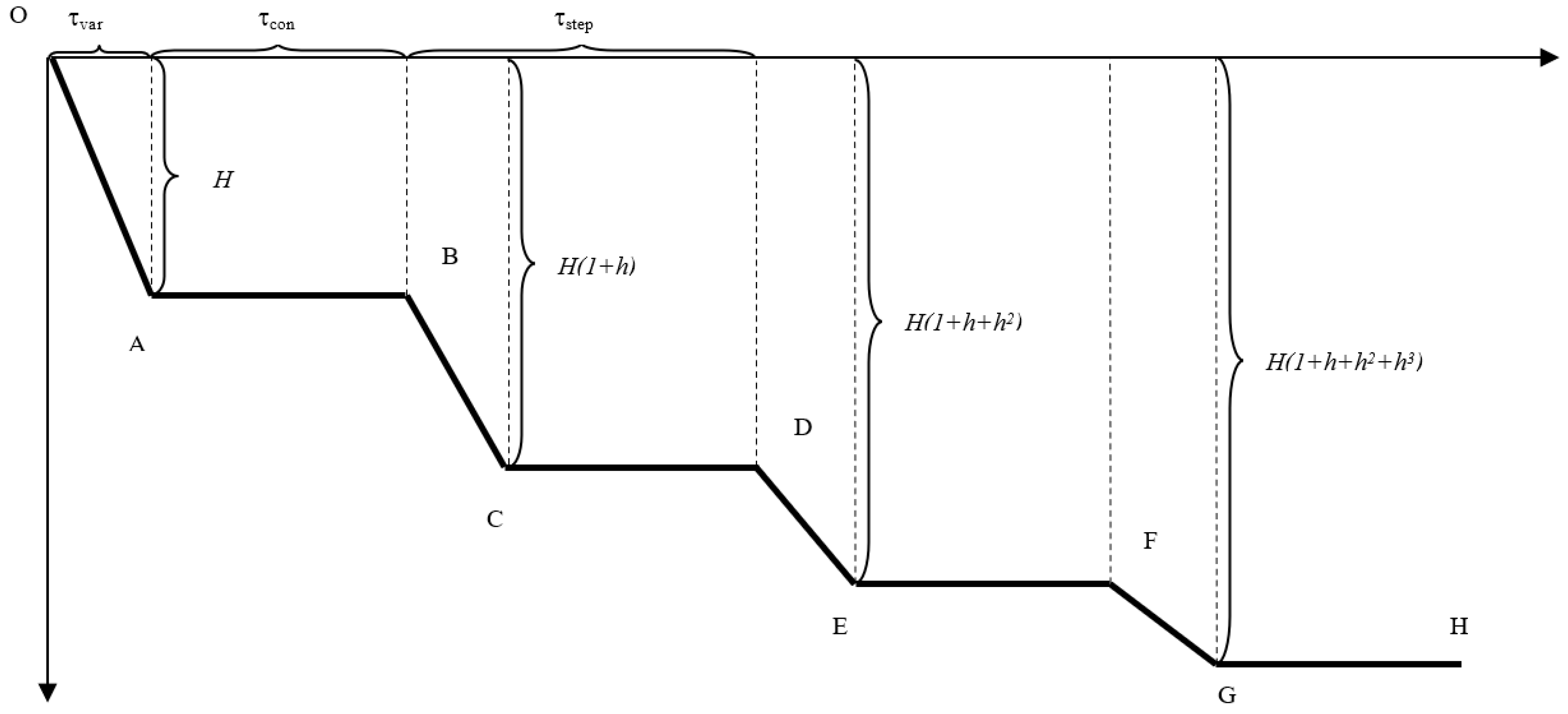
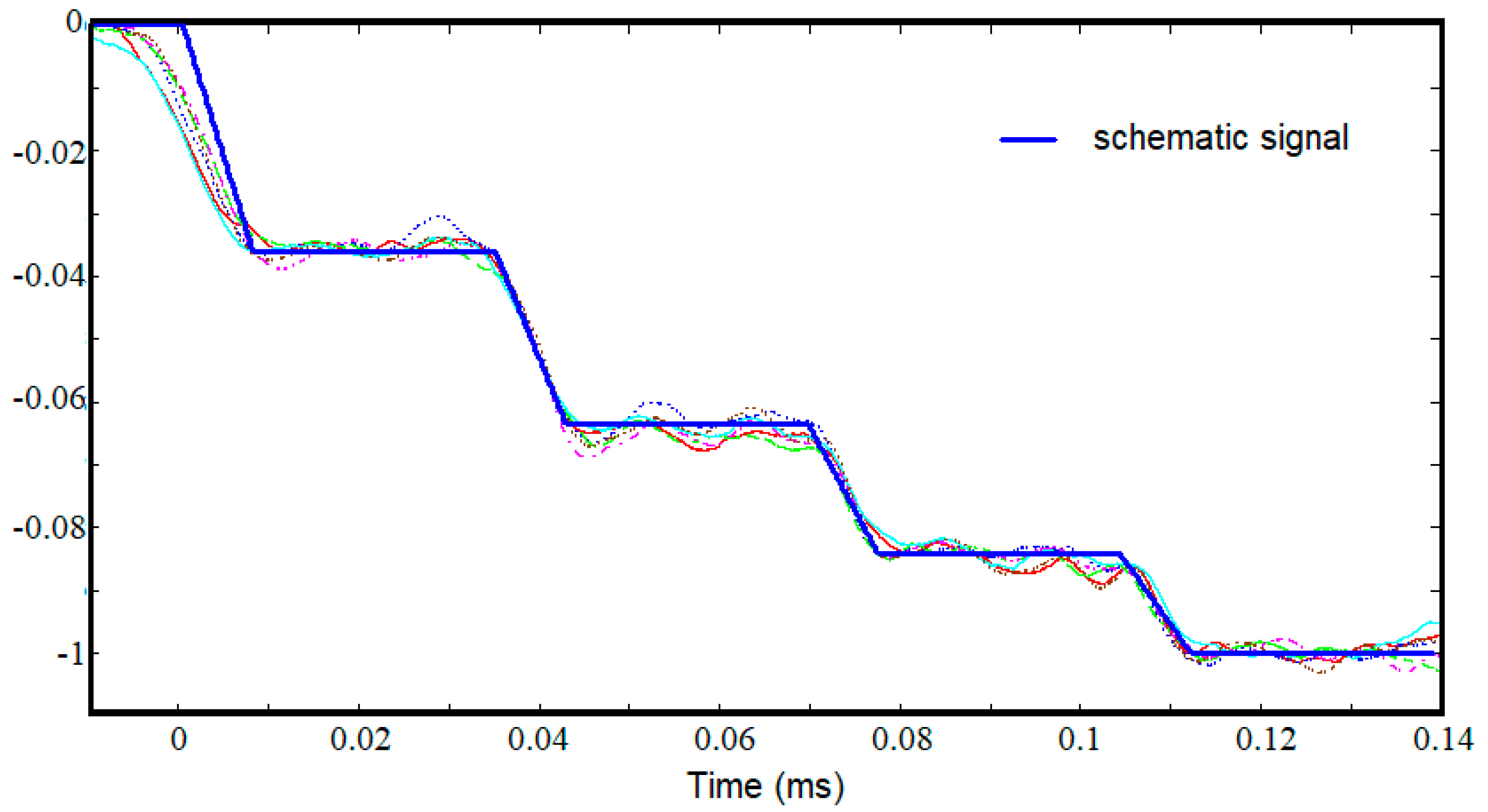
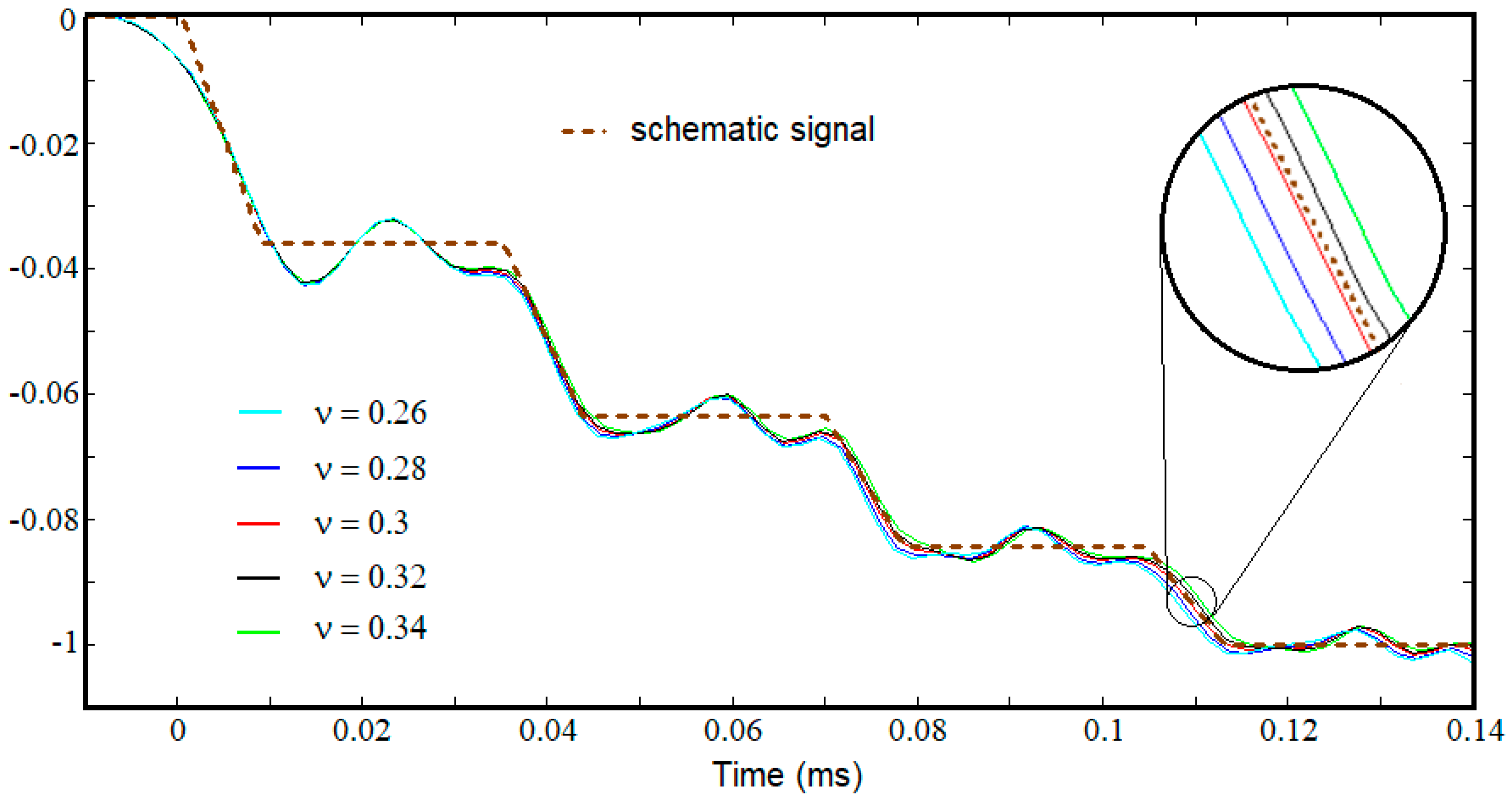
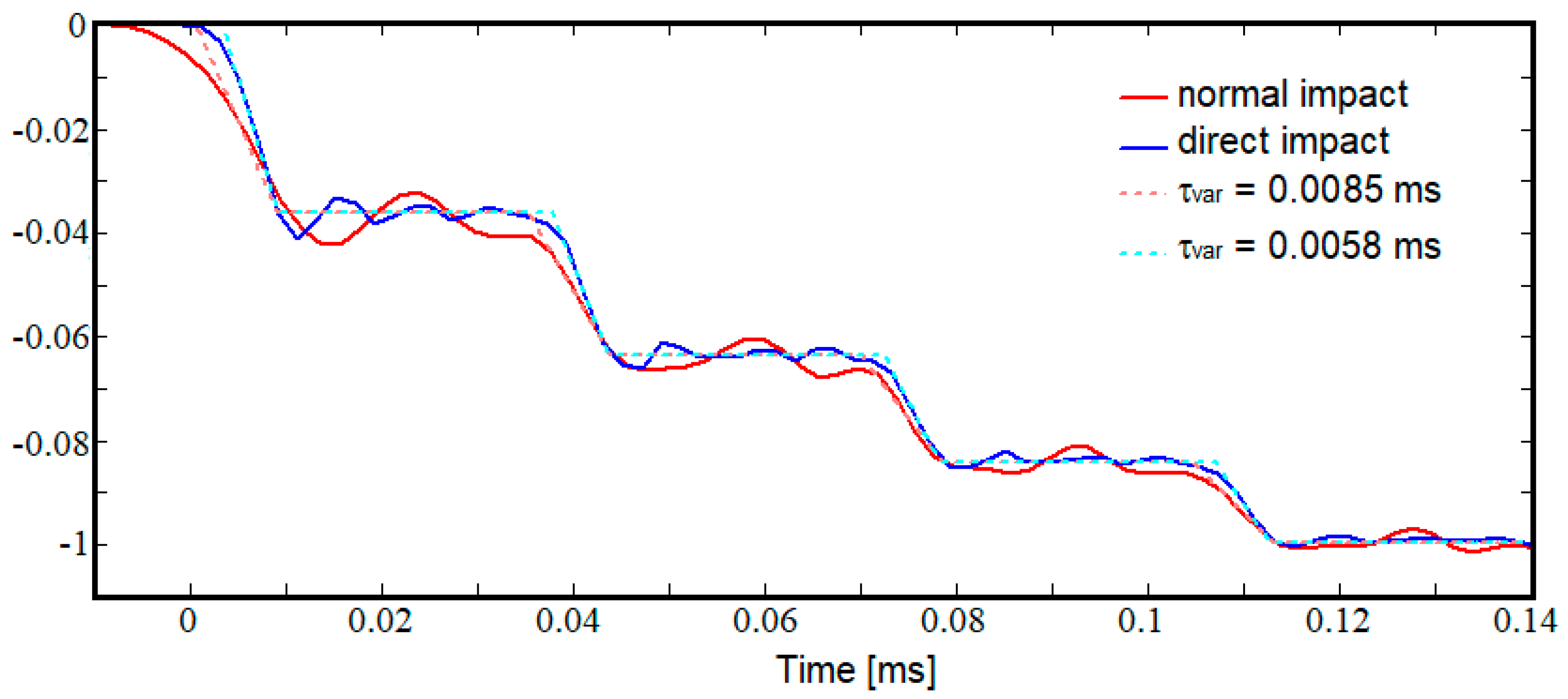
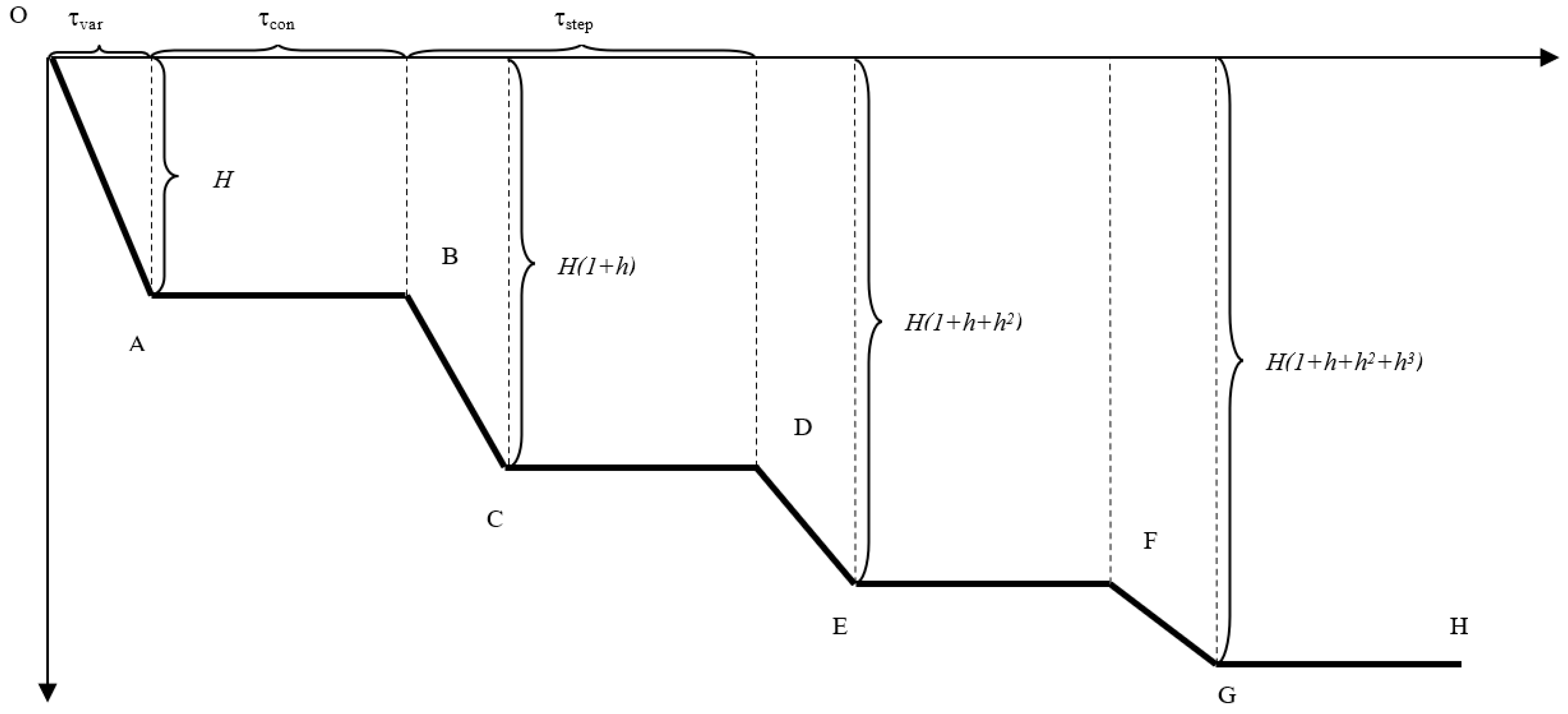
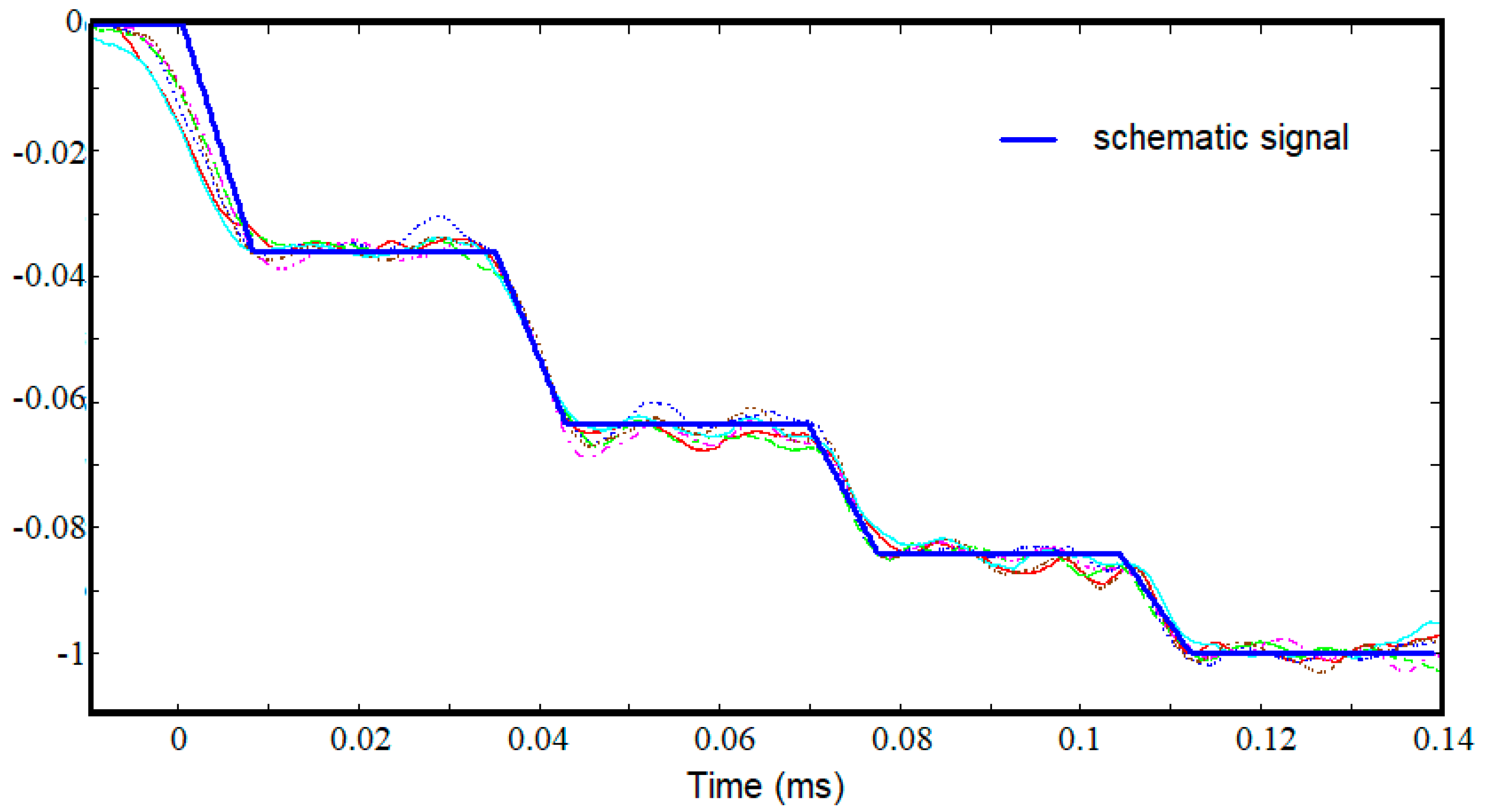
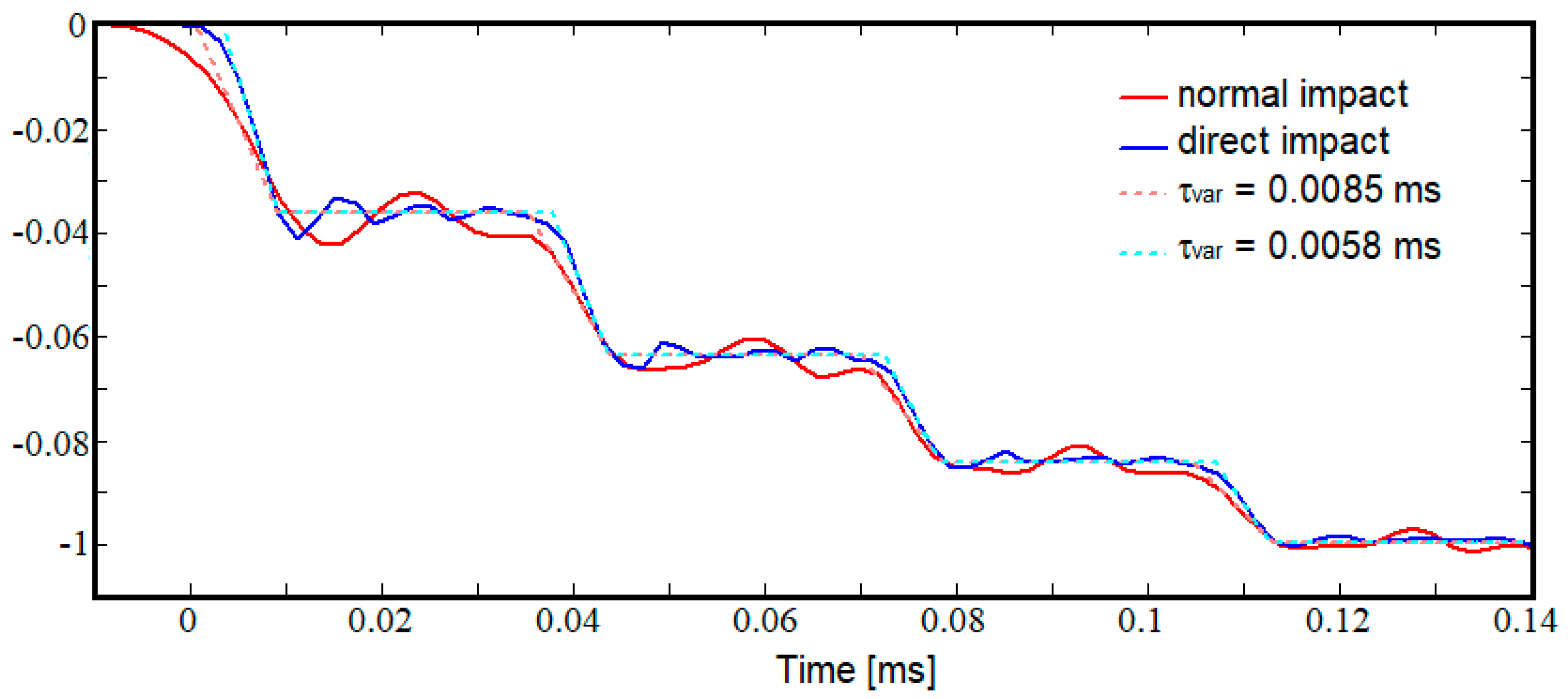
- The accurate calculation algorithm developed on the basis of a schematic signal, which is much closer to the real shape of the acquired signal, admits the existence of a finite jump time from one level to another, τvar;
- (c)
- The results of the tests and the FEM simulations performed so far prove the validity of the stated hypotheses on which this methodology is built;
- (d)
- There is a certain potential for improving the method as well as the possibility to be used in determining the transverse modulus of elasticity.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lord, J.D.; Morrell, R. Measurement Good Practice Guide No. 98, Elastic Modulus Measurement; National Physical Laboratory: London, UK, 2006. [Google Scholar]
- Randjbaran, E.; Majid, D.L.; Zahari, R.; Sultan, M.T.H.; Mazlan, N. Impacts of Volume of Carbon Nanotubes on Bending for Carbon-Kevlar Hybrid Fabrics. J. Appl. Comput. Mech. 2021, 7, 839–848. [Google Scholar] [CrossRef]
- Menčík, J.; Munz, D.; Quandt, E.; Weppelmann, E.R.; Swain, M.V. Determination of elastic modulus of thin layers using nanoindentation. J. Mater. Res. 1997, 12, 2475–2484. [Google Scholar] [CrossRef]
- Zhang, H.; Stewart, M.; De Luca, F.; Smet, P.F.; Sousanis, A.; Poelman, D.; Rungger, I.; Gee, M. Young’s modulus of thin SmS films measured by nanoindentation and laser acoustic wave. Surf. Coat. Technol. 2021, 421, 127428. [Google Scholar] [CrossRef]
- ASTM E1876; Standard Test Method for Dynamic Young’s Modulus, Shear Modulus and Poisson’s Ratio by Impulse Excitation of Vibration. ASTM International: West Conshohocken, PA, USA, 2022.
- ASTM E1875; Standard Test Method for Dynamic Young’s Modulus, Shear Modulus and Poisson’s Ratio by Sonic Resonance. ASTM International: West Conshohocken, PA, USA, 2021.
- Wolfenden, A.; Harmouche, M.R.; Blessing, G.V.; Chen, Y.T.; Terranova, P.; Dayal, V.; Kinra, V.K.; Lemmens, J.W.; Phillips, R.R.; Smith, J.S.; et al. Dynamic Young’s modulus measurements in metallic materials: Results of an in-terlaboratory testing program. J. Test. Eval. 1989, 17, 2–13. [Google Scholar] [CrossRef]
- Roebben, G.; Bollen, B.; Brebels, A.; Van Humbeeck, J.; Van der Biest, O. Impulse excitation apparatus to measure resonant frequencies, elastic moduli, and internal friction at room and high temperature. Rev. Sci. Instrum. 1997, 68, 4511–4515. [Google Scholar] [CrossRef]
- Lin, K. Non-Destructive Measurement for Young’s Modulus using a Self-Mixing Laser Diode. Ph.D. Thesis, University of Wollongong, Wollongong, NSW, Australia, 2018. [Google Scholar]
- Wang, B.; Liu, B.; An, L.; Tang, P.; Ji, H.; Mao, Y. Laser Self-Mixing Sensor for Simultaneous Measurement of Young’s Modulus and Internal Friction (Invited). Photonics 2021, 8, 550. [Google Scholar] [CrossRef]
- Skalak, R. Longitudinal Impact of a Semi-Infinite Circular Elastic Bar. J. Appl. Mech. 1957, 24, 59–64. [Google Scholar] [CrossRef]
- Bancroft, D. The Velocity of Longitudinal Waves in Cylindrical Bars. Phys. Rev. (Series I) 1941, 59, 588–593. [Google Scholar] [CrossRef]
- Frantz, C.; Follansbee, P.; Wright, W. New experimental techniques with the split Hopkinson pressure bar. In Proceedings of the 8th International Conference on High Energy Rate Fabrication, Pressure Vessel and Piping Division, San Antonio, TX, USA, 17–21 June 1984. [Google Scholar] [CrossRef] [Green Version]
- Follansbee, R.S. The Hopkinson Bar. Mechanical Testing, Metals Handbook, 9th ed.; American Society for Metals, Metals Park: Novelty, OH, USA, 1985; pp. 198–217. [Google Scholar]
- Christensen, R.Z.; Swanson, S.R.; Brown, W.S. Split-Hopkinson-Bar Tests on Rock under Confining Pressure. Exp. Mech. 1972, 29, 508–513. [Google Scholar] [CrossRef]
- Wu, X.J.; Gorham, D.A. Stress Equilibrium in the Split Hopkinson Pressure Bar Test. J. Phys. IV France 1997, 7, 91–96. [Google Scholar] [CrossRef] [Green Version]
- Nemat-Nasser, S.; Isaacs, J.B.; Starrett, J.E. Hopkinson Techniques for Dynamic Recovery Experi-ments. Prec. R. Soc. Lend. A 1991, 435, 371–391. [Google Scholar]
- Frew, D.J.; Forrestal, M.J.; Chen, W. A split Hopkinson pressure bar technique to determine compressive stress-strain data for rock materials. Exp. Mech. 2001, 41, 40–46. [Google Scholar] [CrossRef]
- Frew, D.J.; Forrestal, M.J.; Chen, W. Pulse shaping techniques for testing brittle materials with a Split Hopkinson Pressure Bar. Exp. Mech. 2001, 42, 93–106. [Google Scholar] [CrossRef]
- Mao, Y.J.; Li, Y.L.; Wang, R.; Guo, W.G.; Shi, F.F. Experimental and Numerical Study on Unreliability of Young’s Modulus Measurement by Conventional Split Hopkinson Bar. Appl. Mech. Mater. 2010, 29–32, 68–71. [Google Scholar] [CrossRef]
- Miao, Y.G.; Li, Y.-L.; Liu, H.-Y.; Deng, Q.; Shen, L.; Mai, Y.-W.; Guo, Y.-Z.; Suo, T.; Hu, H.T.; Xie, F.Q.; et al. Determination of dynamic elastic modulus of polymeric materials using vertical split Hopkinson pressure bar. Int. J. Mech. Sci. 2016, 108–109, 188–196. [Google Scholar] [CrossRef]
- Miao, Y.G.; Du, B.; Muhammad, Z.S. On measuring the dynamic elastic modulus for metallic materi-als using stress wave loading techniques. Arch. Appl. Mech. 2018, 88, 1953–1964. [Google Scholar] [CrossRef]
- Siviour, C.R. A measurement of wave propagation in the split Hopkinson pressure bar. Meas. Sci. Technol. 2009, 20, 065702. [Google Scholar] [CrossRef]
- Mitrica, D.; Badea, I.C.; Serban, B.A.; Olaru, M.T.; Vonica, D.; Burada, M.; Piticescu, R.-R.; Popov, V.V. Complex Concentrated Alloys for Substitution of Critical Raw Materials in Appli-cations for Extreme Conditions. Materials 2021, 14, 1197. [Google Scholar] [CrossRef]
- Yeh, J.-W. Recent progress in high-entropy alloys. Ann. Chim. Sci. Mater. 2006, 31, 633–648. [Google Scholar] [CrossRef]
- Mitrica, D.; Badea, I.C.; Olaru, M.T.; Serban, B.A.; Vonica, D.; Burada, M.; Geanta, V.; Rotariu, A.N.; Stoiciu, F.; Badilita, V.; et al. Modeling and Experimental Results of Selected Lightweight Complex Concentrated Alloys, before and after Heat Treatment. Materials 2020, 13, 4330. [Google Scholar] [CrossRef]
- Scutelnicu, E.; Simion, G.; Rusu, C.C.; Gheonea, M.C.; Voiculescu, I.; Geanta, V. High Entropy Alloys Behaviour during Welding. Rev. Chim. 2020, 3, 219–233. [Google Scholar] [CrossRef]
- Constantin, G.; Balan, E.; Voiculescu, I.; Geanta, V.; Craciun, V. Cutting behavior of Al0.6CoCrFeNi High Entropy Alloy. Materials 2020, 13, 4181. [Google Scholar] [CrossRef] [PubMed]
- Geantă, V.; Voiculescu, I.; Cherecheș, T.; Zecheru, T.; Matache, L.C.; Rotariu, A.N. Behavior to Dynamic Loads of Multi-layer Composite Structures. Rev. Mater. Compozite 2019, 56, 2. [Google Scholar] [CrossRef]
- Geantă, V.; Cherecheș, T.; Lixandru, P.; Voiculescu, I.; Ștefănoiu, R.; Dragnea, D.; Zecheru, T.; Matache, L. Virtual Testing of Composite Structures Made of High Entropy Alloys and Steel. Metals 2017, 7, 496. [Google Scholar] [CrossRef] [Green Version]
- Meyers, M.A. Dynamic Behaviour of Materials; John Wiley & Sons, Inc.: New York, NY, USA, 1994. [Google Scholar]
- Newman, F.H.; Searle, V.H.L. The General Properties of Matter, 5th ed.; Edward Arnold Ltd.: London, UK, 1959. [Google Scholar]
- Kaiser, M. Advancements in the Split Hopkinson Pressure Bar; Faculty of Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 1998. [Google Scholar]
- Gavrus, A.; Bucur, F.; Rotariu, A.; Cănănău, S. Analysis of Metallic Materials Behavior during Severe Loadings Using a FE Modeling of the SHPB Test Based on a Numerical Calibration of Elastic Strains with Respect to the Raw Measurements and on the Inverse Analysis Principle. Key Eng. Mater. 2013, 554–557, 1133–1146. [Google Scholar] [CrossRef]
- Gavrus, A.; Bucur, F.; Rotariu, A.; Cananau, S. Mechanical behavior analysis of metallic materials using a Finite Element modeling of the SHPB test, a numerical calibration of the bar’s elastic strains and an inverse analysis method. Int. J. Mater. Form. 2014, 8, 567–579. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alloy Al5Cu0.5Si0.2Zn1.5Mg0.2 | Composition, wt. % | ||||
|---|---|---|---|---|---|
| Al | Cu | Si | Zn | Mg | |
| Nominal | 49 | 11.54 | 2.05 | 35.64 | 1.77 |
| Experimental | 43.86 | 11.39 | 2.02 | 38.66 | 2.02 |
| SHPB Component | Elements | Nodes |
|---|---|---|
| Striker | 80,192 | 94,640 |
| Incident bar | 391,040 | 463,097 |
| Sample | 138,752 | 148,240 |
| Transmitted bar | 391,040 | 463,097 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rotariu, A.-N.; Trană, E.; Matache, L. Young’s Modulus Calculus Using Split Hopkinson Bar Tests on Long and Thin Material Samples. Materials 2022, 15, 3058. https://doi.org/10.3390/ma15093058
Rotariu A-N, Trană E, Matache L. Young’s Modulus Calculus Using Split Hopkinson Bar Tests on Long and Thin Material Samples. Materials. 2022; 15(9):3058. https://doi.org/10.3390/ma15093058
Chicago/Turabian StyleRotariu, Adrian-Nicolae, Eugen Trană, and Liviu Matache. 2022. "Young’s Modulus Calculus Using Split Hopkinson Bar Tests on Long and Thin Material Samples" Materials 15, no. 9: 3058. https://doi.org/10.3390/ma15093058
APA StyleRotariu, A.-N., Trană, E., & Matache, L. (2022). Young’s Modulus Calculus Using Split Hopkinson Bar Tests on Long and Thin Material Samples. Materials, 15(9), 3058. https://doi.org/10.3390/ma15093058