1. Introduction
Numerical modelling of concrete, cf. [
1,
2,
3], and its contact zones with other buildings material is and will continue to be a current topic due to advances in concrete technology and material engineering [
4]. In every reinforced concrete member, there are steel-to-concrete interfaces, which were thoroughly studied in reference [
5]. The interfaces could also be found in composite structures as tubular columns filled with concrete [
6] or in structures strengthened with composite sheets [
7]. The last mentioned reference shows how effective a modern finite element (FE) system can be for structure assessment, since the failure modes and force-deflection curves for complex retrofitted beams were perfectly captured in this study.
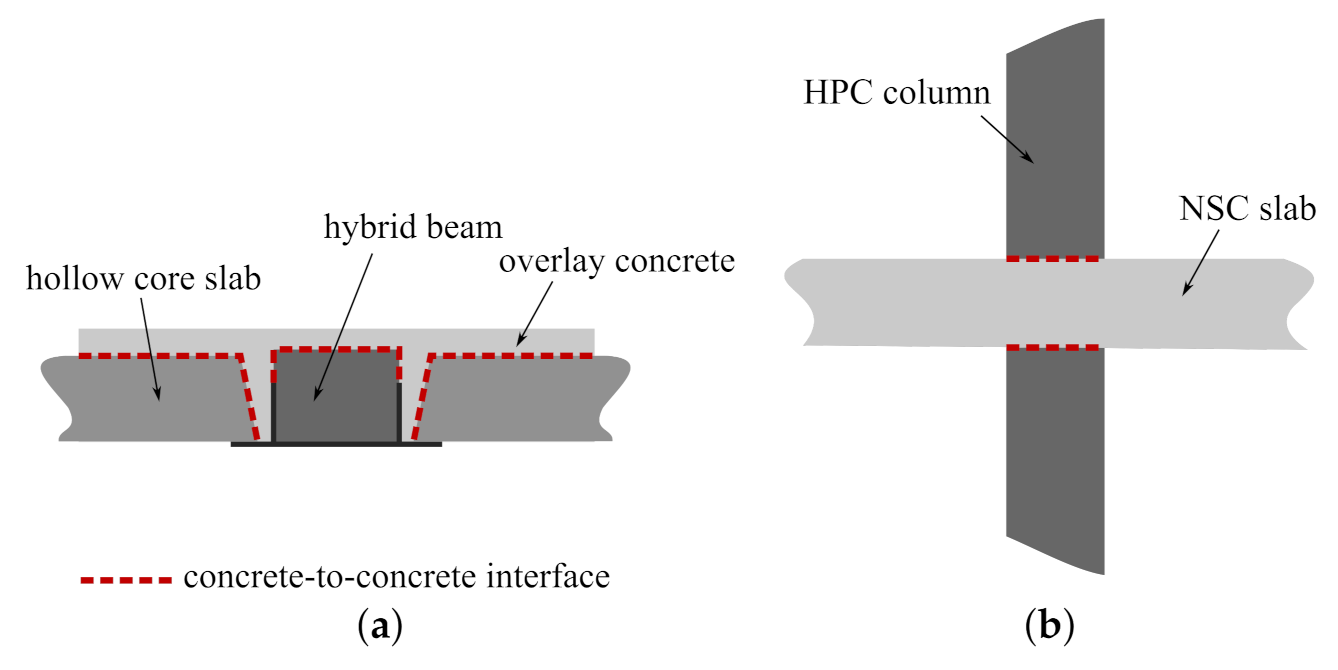
The present study puts forward concrete-to concrete interfaces. Interfaces of different types of concretes, whose strength properties vary significantly, can often be found in modern structures, cf.
Figure 1. For example, they occur in composite structures as slim-floors [
8,
9] or composite T-beams [
10]. In the former, they influence the structure load capacity and deformability tremendously, since they are located at the interface between prefabricated hollow slabs, hybrid beams, and cast in situ overlay concrete, so their total area is of great value. Such types of interfaces can also be found in high buildings at the connections between columns and floors [
11]. The columns are usually made of high-performance concrete (HPC), whereas the concrete class of floor can be remarkably lower. A concrete-to-concrete interface is also formed as a result of structure strengthening by casting additional concrete layers [
12].
Concrete-to-concrete interfaces usually have lower strength properties than the concrete layers that form it. Therefore, the proper and robust numerical model for the interface is crucial to simulate the behaviour of many composite structures. It has to precisely predict the strength of the interface (in a complex traction stress state, i.e., with normal and shear tractions) as well as its post-cracking behaviour. Such models are implemented in popular FE codes like ATENA [
13], ANSYS [
14], or Abaqus [
15]. The calibration of an interface model in the first code, which is dedicated to the modelling of concrete structures, is easier than in the other two general-purpose FE systems. Especially, the standard damage initiation criterion in the ANSYS or Abaqus code is not suitable for concrete under a complex traction state.
To determine the mechanical parameters of the interface model, the results of different strength tests can be used. They were widely described in many references [
12,
16,
17,
18,
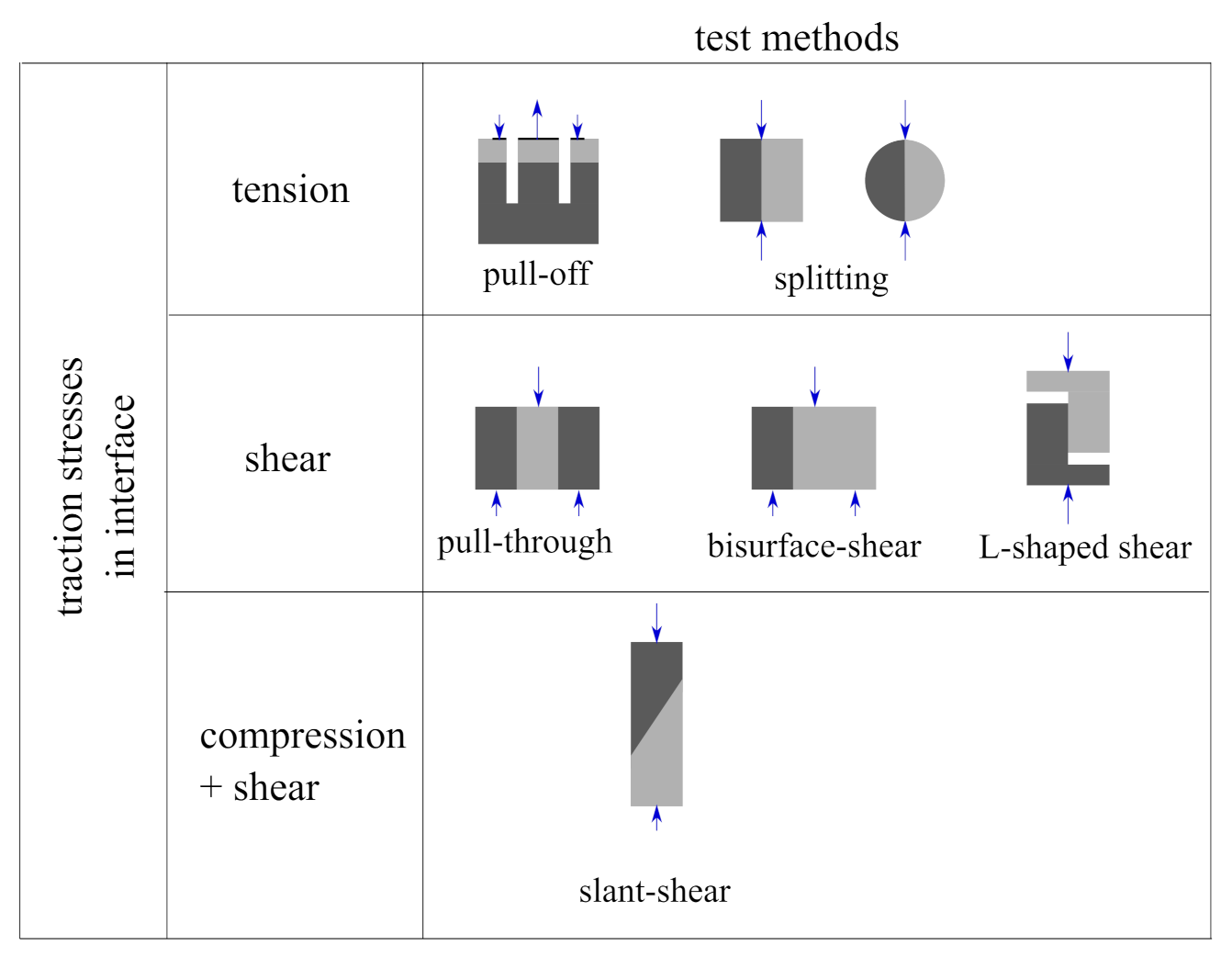
19]. In general, such tests aim to induce a homogenous traction stress state at the interface: tension or shear dominated (with compressive normal traction stresses as well). Schemes of the most popular test methods are shown in
Figure 2. A pull-off test is often used in a quick assessment of bond strength [
20] and can be used for in situ conditions as well. Modifications of standard laboratory tests for homogenous concrete like splitting or direct tension are also used for samples prepared in a laboratory [
18,
21]. In
Figure 2, the most popular tests for determination of interface shear strength were presented [
22,
23], but new testing methods have also been developed [
24]. The easiest way of testing the interface strength under compression and shear is a slant-shear test [
25]. To determine the fracture energy of an interface, methods initially developed for homogenous concrete are used, like the three-point bending sample with a notch [
26,
27] or the wedge splitting test [
28]. For a quick assessment of the strength properties of an interface, it is convenient to introduce the bond efficiency coefficient
[
16,
29] which can be calculated as follows:
where:
and
are the strength of the interface and the weaker concrete layer obtained from the same test method, respectively.
The bond strength between layers of concrete cast at different times is affected by many factors described in numerous references, cf. [
16,
25,
30,
31]. After the literature survey, the following factors can be considered as the most important: properties of the overlay and substrate concretes, surface characteristics (its cleanliness and mechanical preparation), compaction of concrete mix, and curing conditions, which influence shrinkage strains. The influence of the shrinkage is hard to capture with specimens of small dimensions, which was clearly presented in reference [
21].
There are a few recent studies concerning the calibration of a numerical model for the concrete-to-concrete interface. Frenzel and Cubarch [
32] performed shear tests of a concrete interface with regular, infra-lightweight, and foam concrete. On this basis, they calibrated a numerical model for a concrete-to-concrete interface subjected to pure shear in the ATENA code and obtained satisfactory agreement between the simulation and test results. Farzad et al. [
33] conducted three types of tests: flexural, direct shear, and slant-shear ones, which enabled them to obtain strength characteristics of ordinary-to-ultra-high performance concrete (UHPC) interface in different traction stress states. Afterwards, they proposed parameters for the concrete damage plasticity model (CDP) in the Abaqus code for fictitious continuum material corresponding to the interface behaviour. However, such an approach is not recommended by the Abaqus manual [
15]. Using continuum material models with an interface element is appropriate in the case of flexible interfaces (with lower stiffness than the stiffness of connected parts) and when it is possible to determine the strength and deformability of the material, which constitutes an interface in laboratory tests. Such a situation does not occur for a concrete-to-concrete interface—this kind of connection is obviously initially rigid, and it is impossible to extract its material due to its infinitesimal thickness. According to the manual [
15], a material model based on a traction–separation relation should be used for such kinds of interfaces. Valikhani et al. [
22] calibrated a model based on cohesive elements and the traction–separation law available in ATENA for a concrete-to-UHPC interface. Only shear loading was considered in this study. The latest study by Yuan et al. [
34] concerns a rock-to-concrete interface. It contains detailed research on composite beams made of concrete and rock as well as the proposition of calibration of the traction–separation law for interface subjected to tension (mode I of fracture) implemented in the ANSYS software [
14]. All in all, the authors of this study could not find in the literature a complete strategy for calibration of a concrete-to-concrete interface subjected to various loading conditions (combination of normal and tangential traction stresses), especially using cohesive elements and the traction–separation relation available by default in the Abaqus or ANSYS code.
The main aim of this study was to propose a complete strategy for calibration of a concrete-to-concrete interface according to the mentioned assumptions. Simulations were performed with the Abaqus code [
15] using cohesive elements and the traction–separation-type material model. The standard constitutive model was enhanced with a simple
USDFLD user subroutine coded in FORTRAN, which facilitates the correct prediction of the interface strength subjected to compressive normal forces. The issue of fracture energy in two modes of fracture (tensile and shear) was discussed and implemented in the analyses. The results of experimental tests found in the literature (i.e., in references [
21,
25,
26]), as well as the results obtained during own pilot studies, were used to validate the proposed strategy. The validation part was divided into four case studies (CS). The following types of concrete-to-concrete interface laboratory tests were examined: three-point bending of a beam with a notch, splitting of cubic specimens, and slant-shear tests on prisms.
The major novel elements presented within the article are as follows: a complete strategy for calibration of interface traction–separation laws for concrete-to-concrete interfaces available by default in the Abaqus code and the detailed non-linear simulation of the most popular strength tests of concrete-to-concrete interfaces. They took into account: advanced constitutive models for concretes and their interfaces as well as detailed geometry of the loading devices. It is worth mentioning that the progress of delamination of bi-material specimens is hard to follow with modern optical measurement systems due to their brittle failure modes, so only numerical studies could give a wider insight into this process at this point [
23,
27].
3. Numerical Modelling Strategy
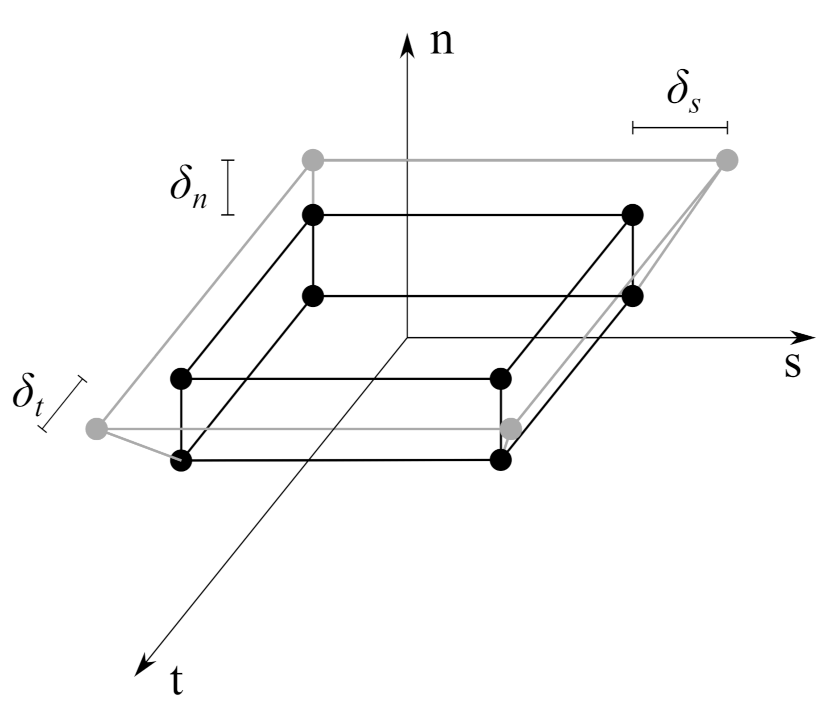
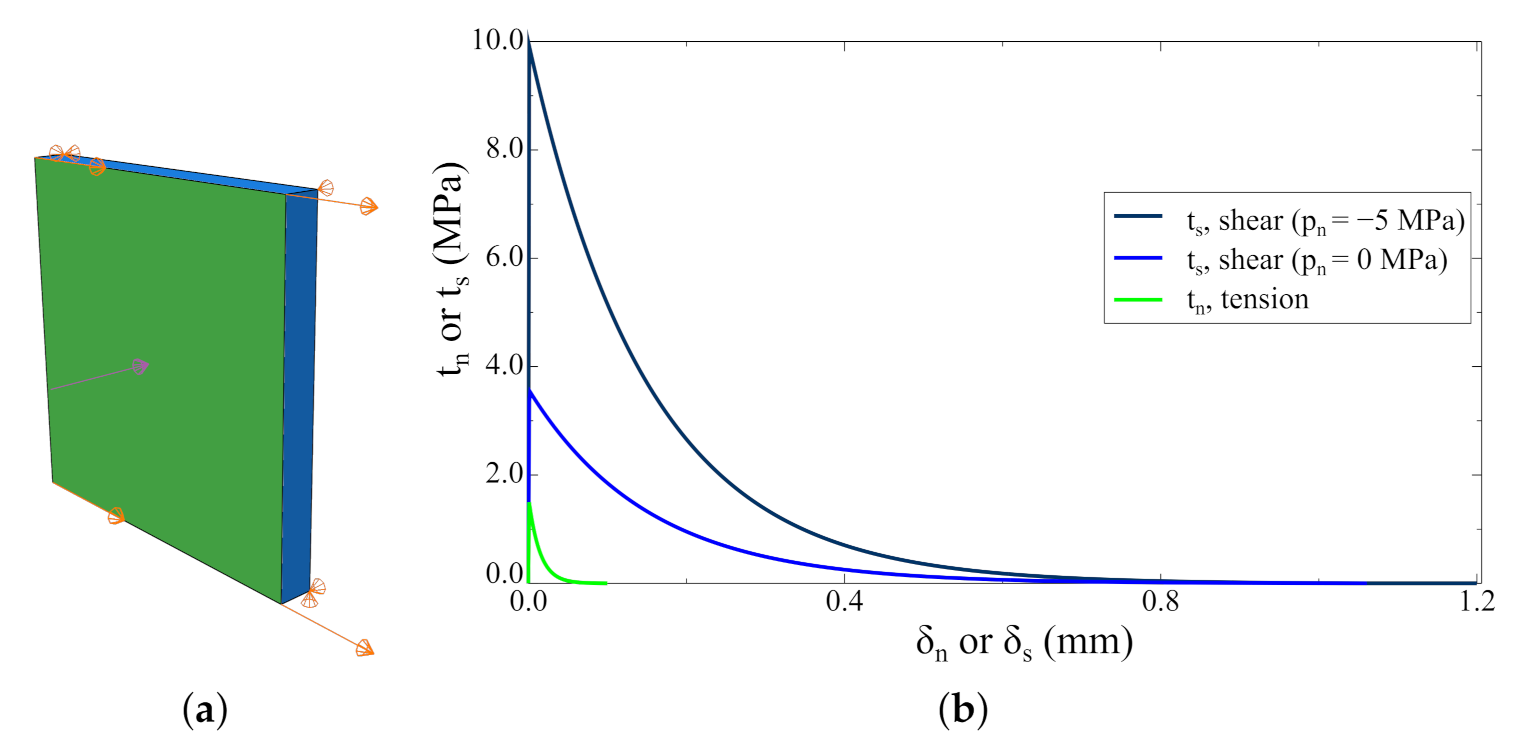
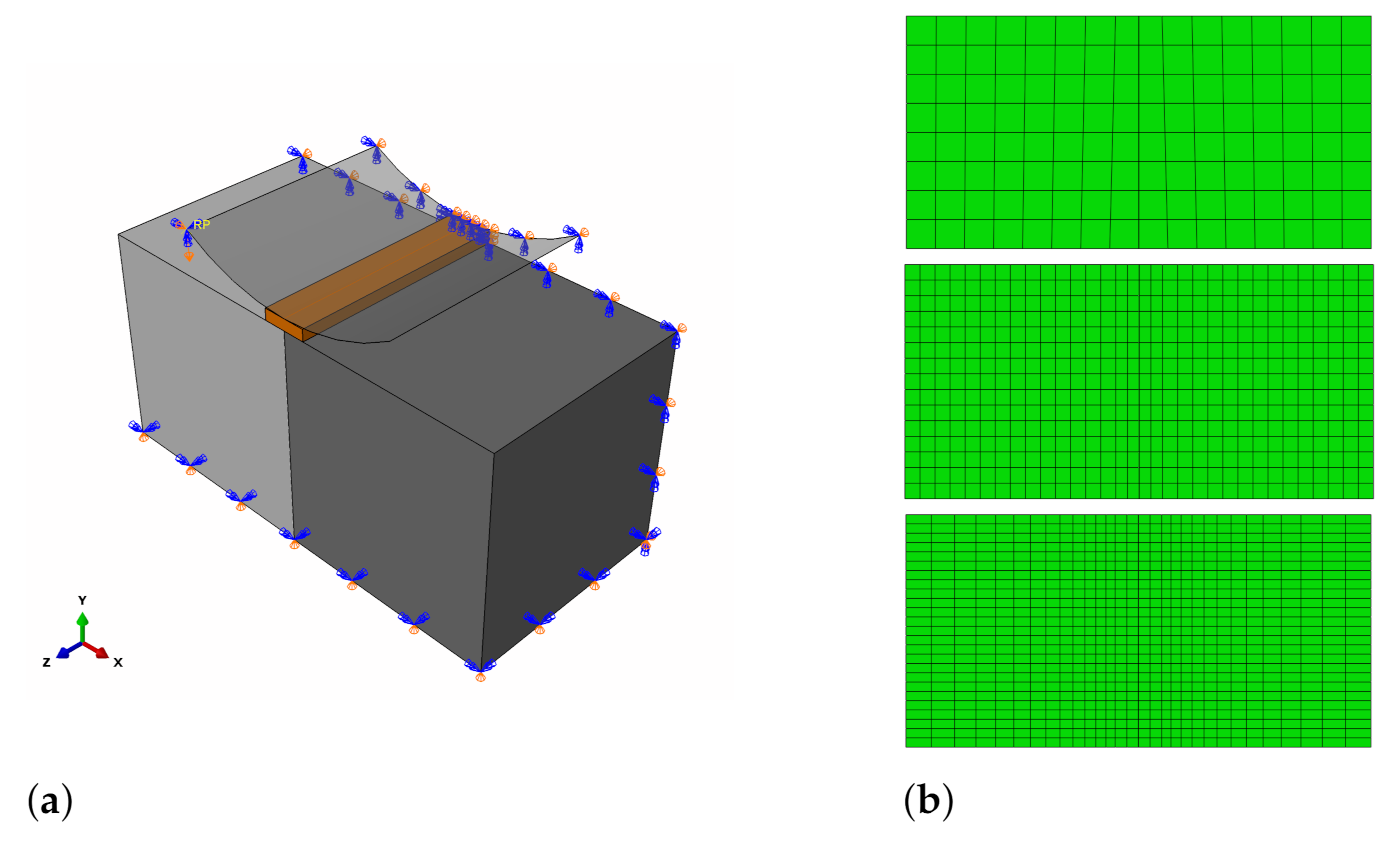
The interface was modelled using cohesive elements, whose symbol is COH3D8 according to programme documentation [
15]—see
Figure 4. Such elements have eight nodes, so they use a linear approximation of the displacement field inside the element. They can be used with continuum-based constitutive relations or with a constitutive model formulated in terms of a traction–separation function.
In a 3D domain in the
elastic regime (before damage initiation), the traction–separation law neglecting normal-shear states coupling has the following form:
where:
—the traction stress vector; indexes
n,
s, and
t mean normal, first, and second tangential direction, respectively, e.g.,
—traction normal to the interface;
,
, and
—the stiffness of interface material in three directions,
,
, and
, respectively—interface nominal strains,
—initial thickness of the interface,
,
, and
—separations (displacement jumps at an interface) in three orthogonal directions. It is worth mentioning that the traction stress vector is related to the Cauchy stress tensor (
) in the following manner
, where
is normal to the interface plane [
40,
41].
Equation (
4) can be rewritten as:
where:
,
, and
—which are stiffness factors of the interface. In such a form, the elastic part of constitutive model for interface is given in references [
13,
40]. The stiffness coefficients for concrete–concrete interfaces have no clear physical interpretation since the interface before degradation can be assumed as a rigid one. Some authors try to prescribe a
physical interpretation, e.g., the interface zone was assumed as a 100
m thickness in reference [
33]. However, assuming very small interface thickness, resulting in large values of its stiffness, can have an adverse influence on the convergence of the incremental-iterative procedure due to the large values of the unbalanced force vector. On the other hand, the introduction of too-small values can result in the wrong prediction of stress concentrations, which occur in the vicinity of two material connections. Therefore, the recommendations from the ATENA manual seem to be reasonable [
13]. It recommend there to assume the following stiffness for the cohesive elements for the concrete–concrete interface:
where:
a—the biggest dimension of the connected parts and
E and
G are Young’s and Kirchhoff’s modules of the weaker concrete, respectively.
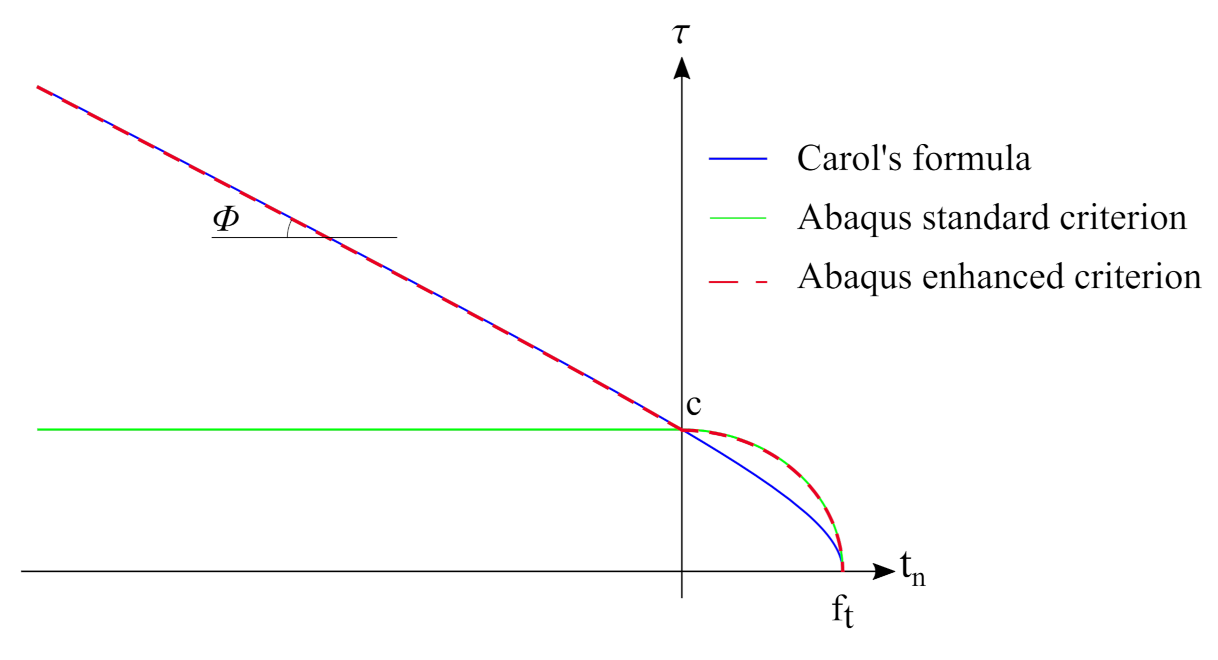
The inelastic part of the traction–separation law implemented in the Abaqus code was formulated in the framework of the damage theory. The onset to the damage state is indicated by the
damage initiation criterion. Among the few available ones, the quadratic nominal stress criterion was selected. It can be represented as:
where:
—maximum normal traction stress (i.e., tensile strength, associated with mode I in the nomenclature of fracture mechanics);
and
—maximal shear tractions in directions
n and
s (i.e., shear strength in pure shear), respectively.
—the Macaulay brackets, which means the following operation:
Therefore, damage factors are not activated in a pure compression state, and allowable shear stresses do not depend on normal stress—see
Figure 5. Such behaviour does not correspond to the concrete–concrete interface, since compressive normal stress causes an increase in the shear strength. Carol’s formula [
42] is believed to describe the failure envelope for the concrete—concrete interface correctly [
18,
40,
43]:
where:
—the resultant shear traction;
—the tensile strength of interface; and
c—the cohesion. The standard Abaqus damage traction–separation interface model was enhanced by a user subroutine
USDFLD to make the failure envelope pressure-dependent:
where:
,
and
—the tensile and shear strength, respectively.
The
USDFLD subroutine allowed us to modify the parameters of models implemented in the Abaqus code by default at the beginning of each increment of the Newton scheme. Consequently, it is important to set a small value of increment load size when one uses such an approach. On the other hand, the problem is highly non-linear, so small increments are necessary for the convergence of the incremental-iterative procedure. The proposed algorithm reads the normal traction and calculates the admissible shear stress according to Carol’s formula. All the discussed criteria are shown in
Figure 5.
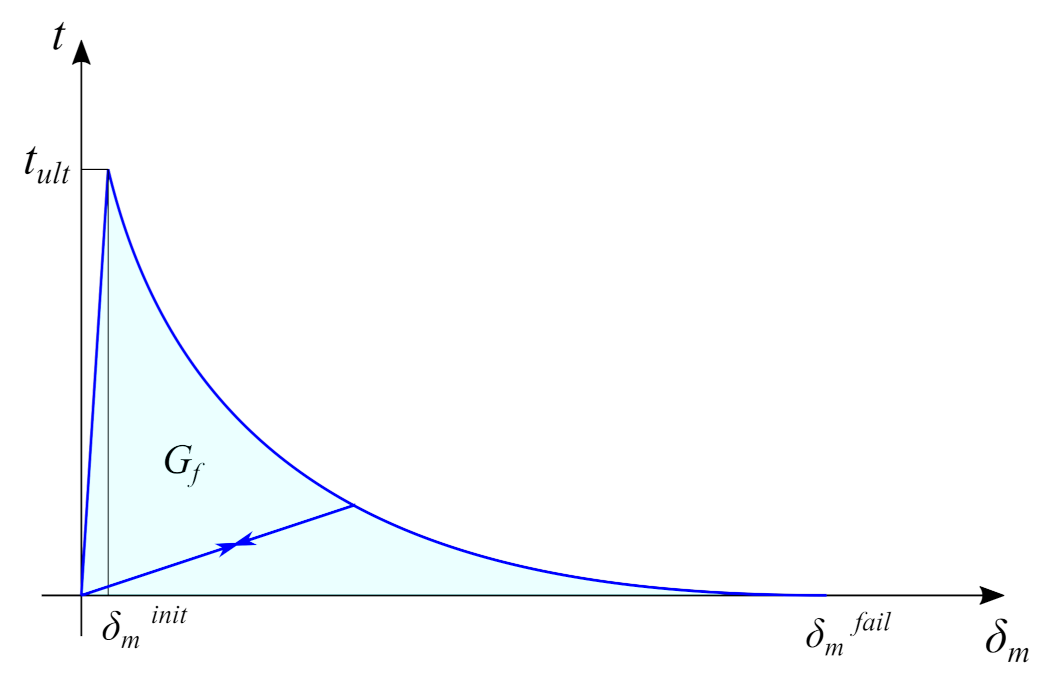
The last issue connected with a traction–separation interface model is its
post-cracking behaviour. After reaching the damage-initiation criterion, tractions are calculated taking into account the damage factor
D:
The above equation shows that in the case of interface compression, there is no reduction in normal stiffness. The evolution of the damage parameter under a combination of normal and shear deformation is described using an effective displacement:
In the present modelling strategy, exponential damage evolution was used, in which damage variable
D is described by the relation:
where:
—the maximum effective displacement during the loading history;
—the effective displacement at the damage initiation;
—the effective displacement at complete failure; and
—the parameter which controls the rate of softening (in the present studies, the typical assumed value for concrete was equal to 7.0 [
44]). The model behaviour is shown in
Figure 6.
The post-peak behaviour of the concrete-to-concrete interface differed significantly for tension and shear states. In the present study, the effective displacement at failure was related to the fracture energy for the mode I type of fracture (
) or for mode II (
). The energy dissipated in any mode (
) can be calculated according to:
where:
—the ultimate stress in the given mode. The first term can be neglected due to its very small value in comparison to the second one. After calculating the integral and some mathematical manipulations, the formula for the effective displacement of failure can be obtained:
The fracture energy in mode I is similar to the energy in mixed mode I-II conditions [
45], whereas in a pure mode II, it is much larger—about 20 times more [
46]. The fracture energy, when the interface is under simultaneous compression and shear, is even greater, since, after the crack formation, the interface is capable of transmitting shear stresses due to the shear-friction mechanism [
42,
47,
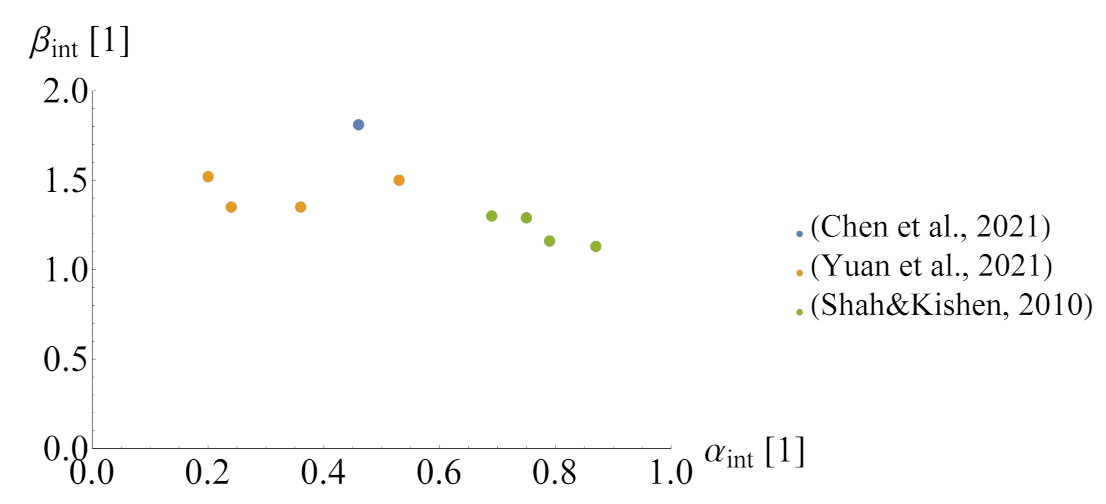
48]. Tests for a concrete-to-concrete interface, in which the fracture energy was determined in addition to its strength, are scarce, so the assumption of the correct value of this parameter is not an easy task. The following relation can be assumed between the fracture energy of the interface (
), the bond efficiency coefficient (
), and the fracture energy of rgw weaker concrete (
):
where:
—the coefficient that can be related to
. These relations obtained by three research teams ([
26,
34,
37]) are summarised in
Figure 7. After analysing the data, it can be concluded that the value of coefficient
should be taken from 1.2 to 2.0. In case of a lack of experimental results, the fracture energy of weaker concrete in modes I and II can be estimated with the following formulas [
36,
46]:
where:
—the maximum aggregate size (in (mm)), and
—the cubic compressive strength (in (MPa)).
The whole calibration strategy for a concrete-to-concrete interface was summarised in
Table 7. The viscous regularisation was used to obtain a stable model response in the post-peak regime. It is worth mentioning that in the CAE module of the Abaqus code, this parameter has to be introduced via the “Assign Element Type” window, which is not in the “Property” module.
The
concrete region was modelled with C3D8 continuum elements with selective integration [
15]. The concrete damage plasticity (CDP) was chosen as a constitutive model for concrete. The version without the scalar damage parameter was assumed since only monotonic loads were analysed. The theoretical background of this model was presented in references [
50,
51]. The model has gained significant popularity and was discussed in detail in many references, e.g., [
52,
53,
54,
55], so its thorough description could be omitted in this study.
In general, the model is formulated in the framework of the theory of plasticity with an additive strain tensor decomposition:
where:
and
—total and plastic strain tensors, respectively, and
—the elasticity tensor for isotropic material. The CDP model uses a yield criterion proposed by Lubliner [
50] and isotropic strain hardening/softening. The flow is governed by a non-associated flow rule. As the plastic potential, the smoothed Drucker–Prager cone is assumed. The hardening/softening in tension is controlled by equivalent plastic strain in tension (PEEQT according to the manual [
15]), whereas, in compression, another equivalent plastic strain is introduced (PEEQ according to [
15]). Distribution of these scalars can be used to analyse which regions of the model are cracked (PEEQT) and which regions are crushed under compression (PEEQ) during the loading history of the analysed specimen. The parameters that have to be entered into the programme are summarized in
Table 8.
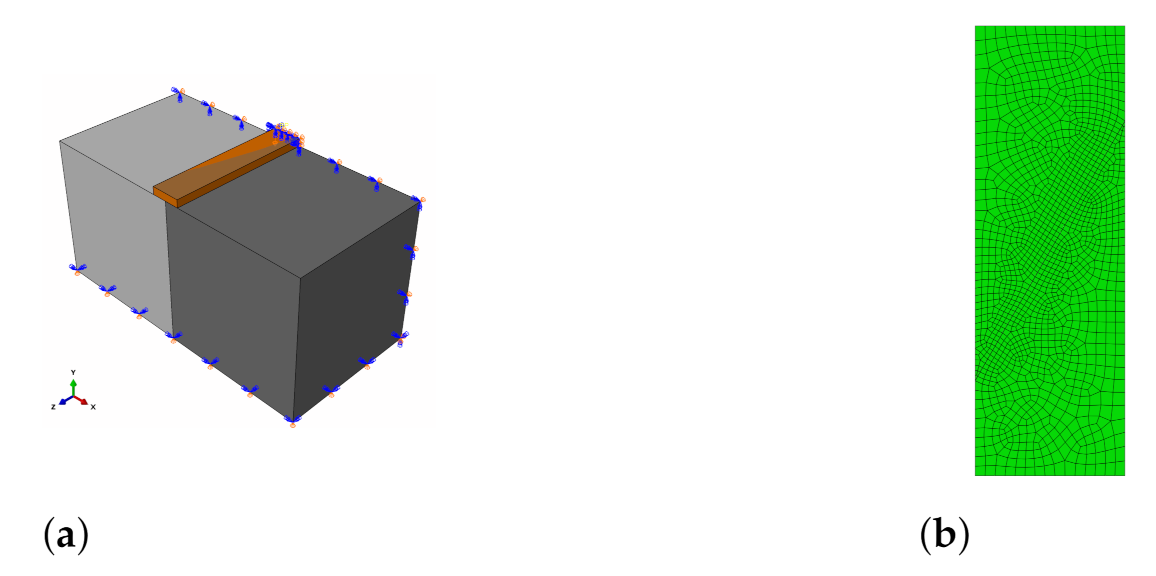
In all presented case studies, the shape of the loading device was modelled precisely. In order to reduce the computational effort, they were discretized with R3D4 rigid elements. Between the surfaces of the loading device and the specimens, the contact with Coulomb friction was assumed with the friction coefficient equal to 0.6. Due to convergence issues, the simulations were displacement-driven, i.e., as the boundary conditions, displacements of loading devices were assumed.
The non-linear problem was solved using an incremental-iterative Newton–Raphson algorithm. Two default convergence criteria were used, which are precisely described in reference [
3]. The tolerance for unbalanced forces was assumed as equal to 2%, whereas the tolerance for displacement correction vector was set to 1% (default values).
5. Discussion
The strategy for adjusting an interface model available by default in the Abaqus code to the behaviour of concrete-to-concrete interface was proposed in
Section 3. It was based on cohesive elements with the damage-elastic traction–separation constitutive model, which should be used to model initially rigid and thin connections between layers made of different concretes [
13,
15,
40]. The standard model was enhanced using the simple
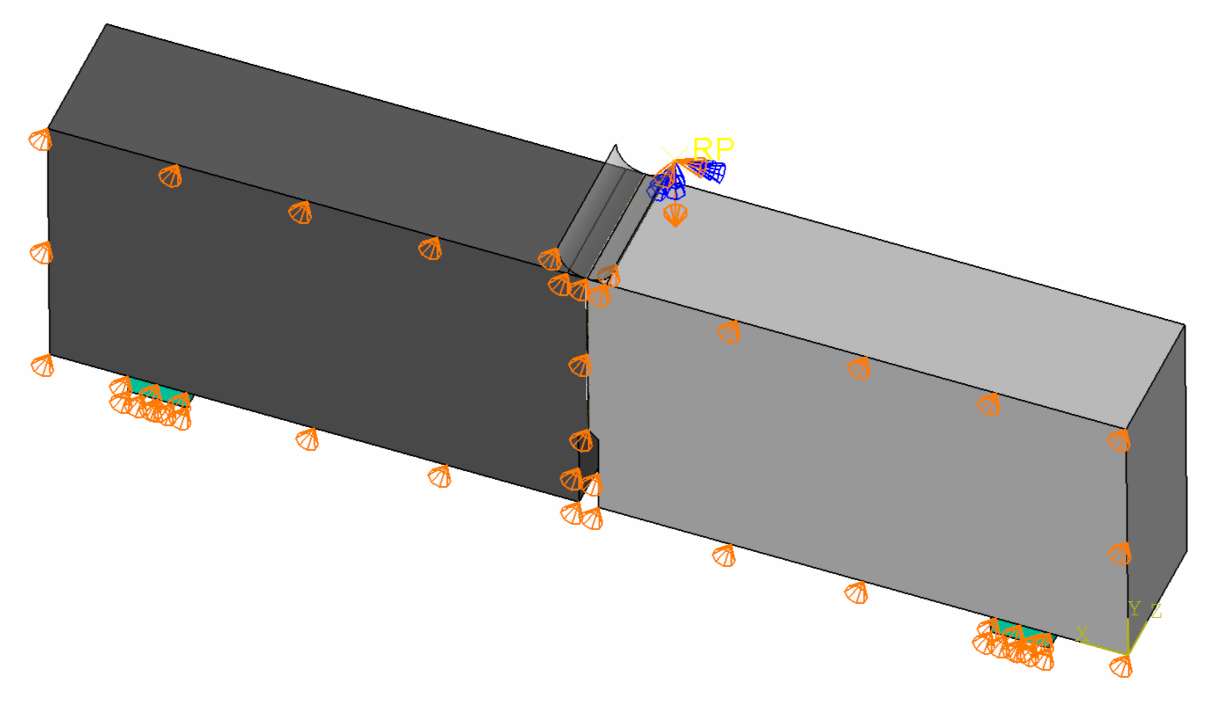
USDFLD user procedure, which enabled us to introduce the strength envelope, which is dependent on a normal traction value. The model took into account the different fracture energy values for modes of fractures I and II. The proposed approach was verified and validated with four case studies concerning: one element test, simulation of three-point bending of the bi-material notched beam [
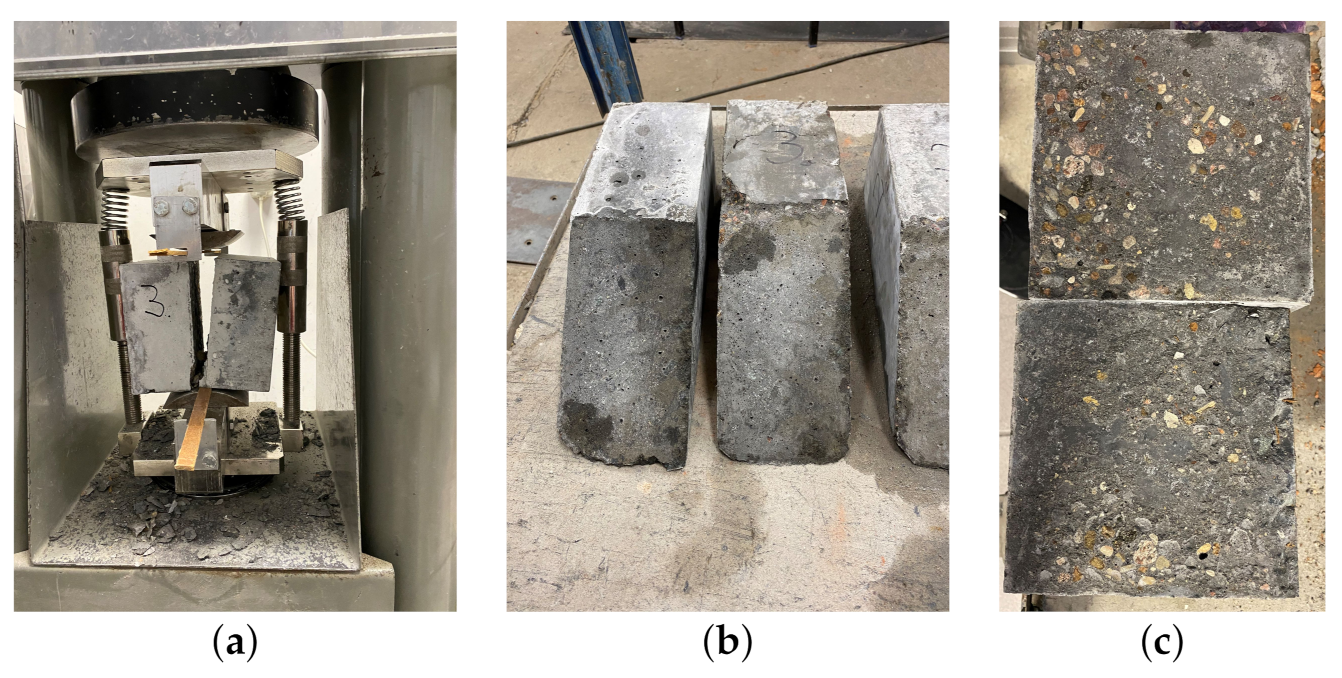
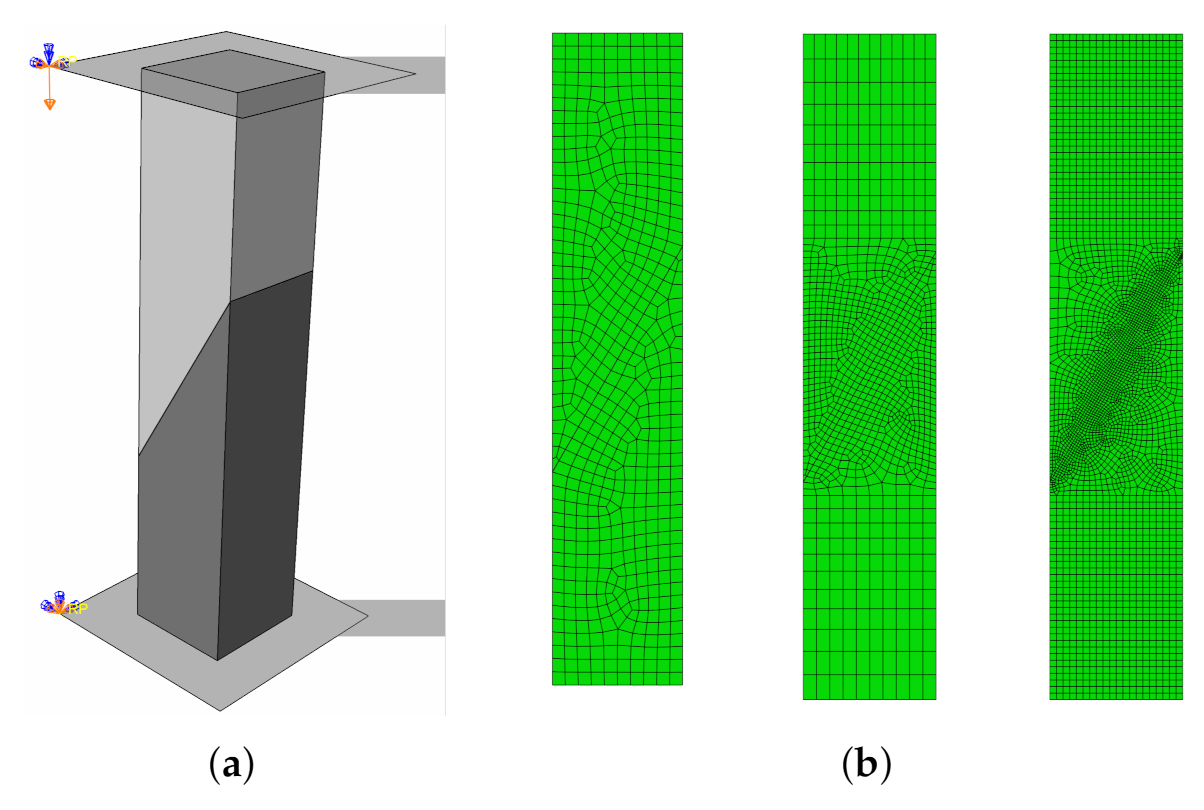
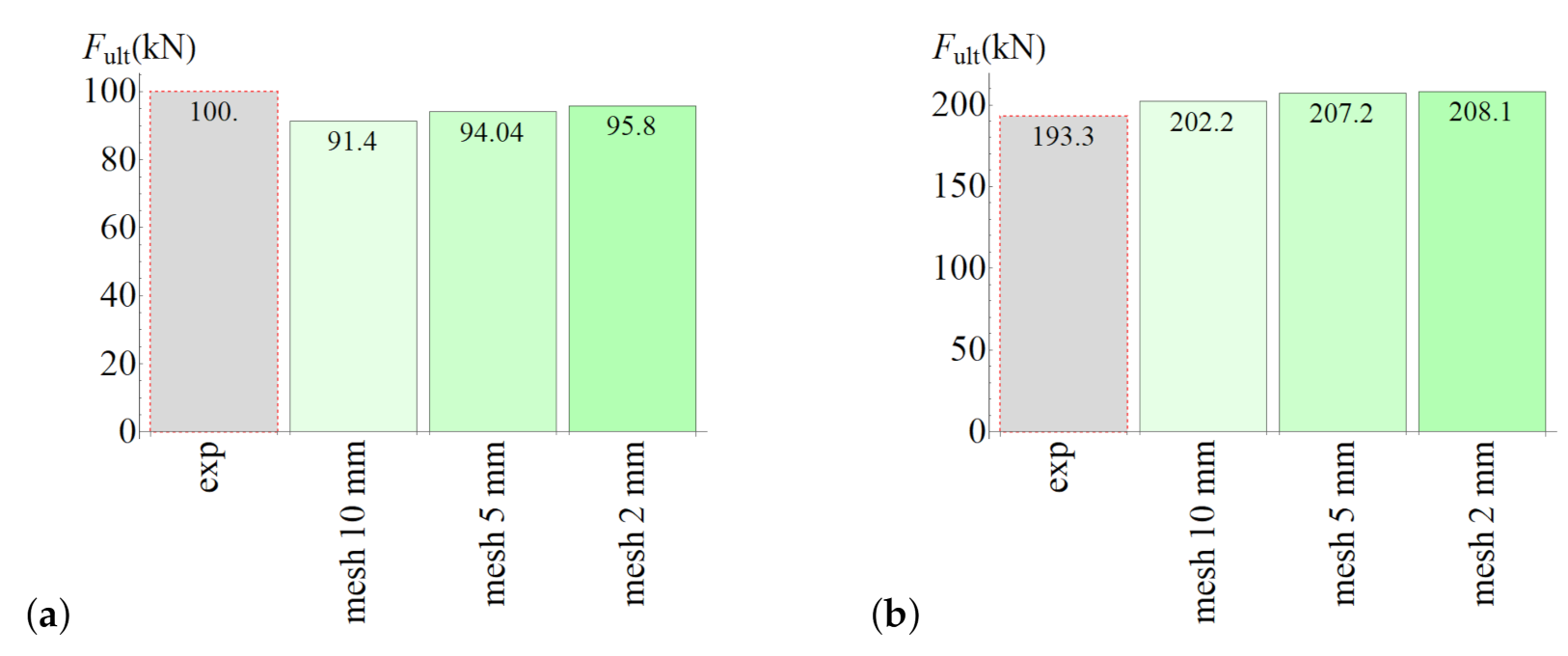
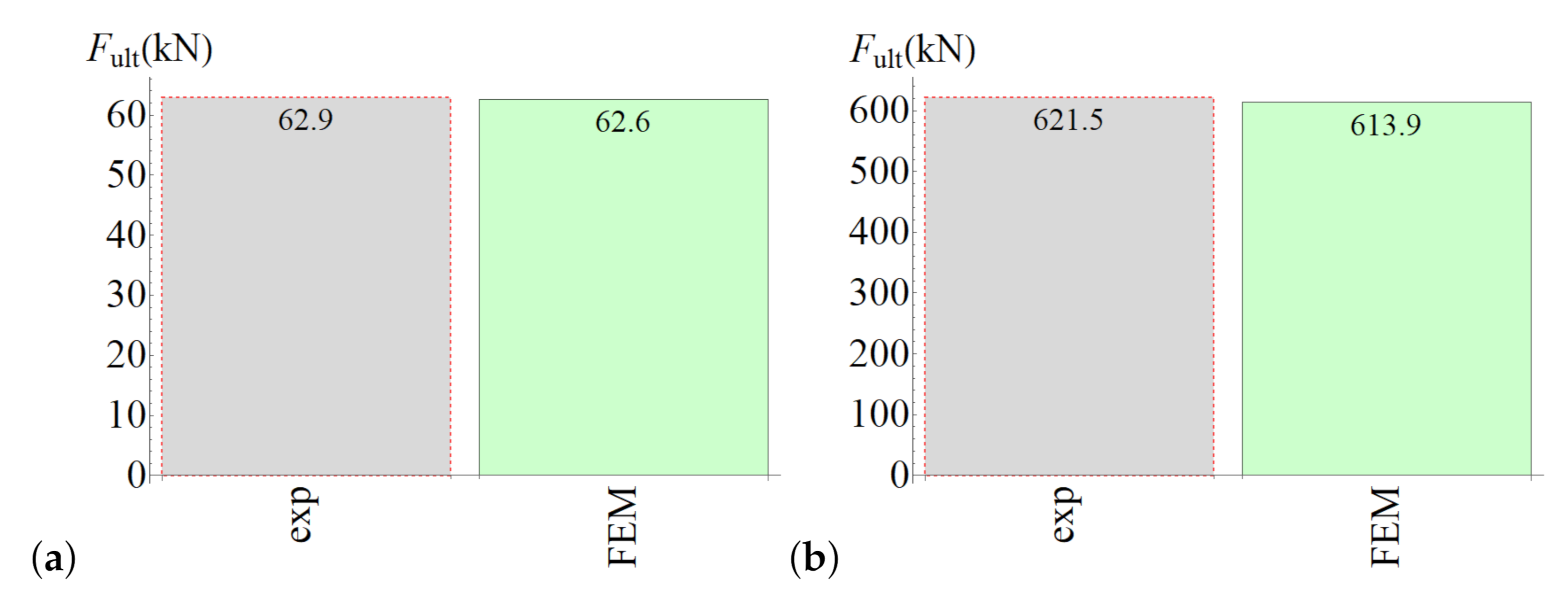
26], simulation of two series of splitting, and slant-shear tests—our own pilot research and the research made by Santos and Julio [
21,
25]. The results of the performed analyses are summarised in
Table 10. The ratio of the ultimate force predicted by the FEM model and obtained as an outcome of a laboratory test was calculated for CS2-CS4. Its mean value was 1.01, and the CoV was 5%, which proves the the accuracy of the proposed modelling strategy.
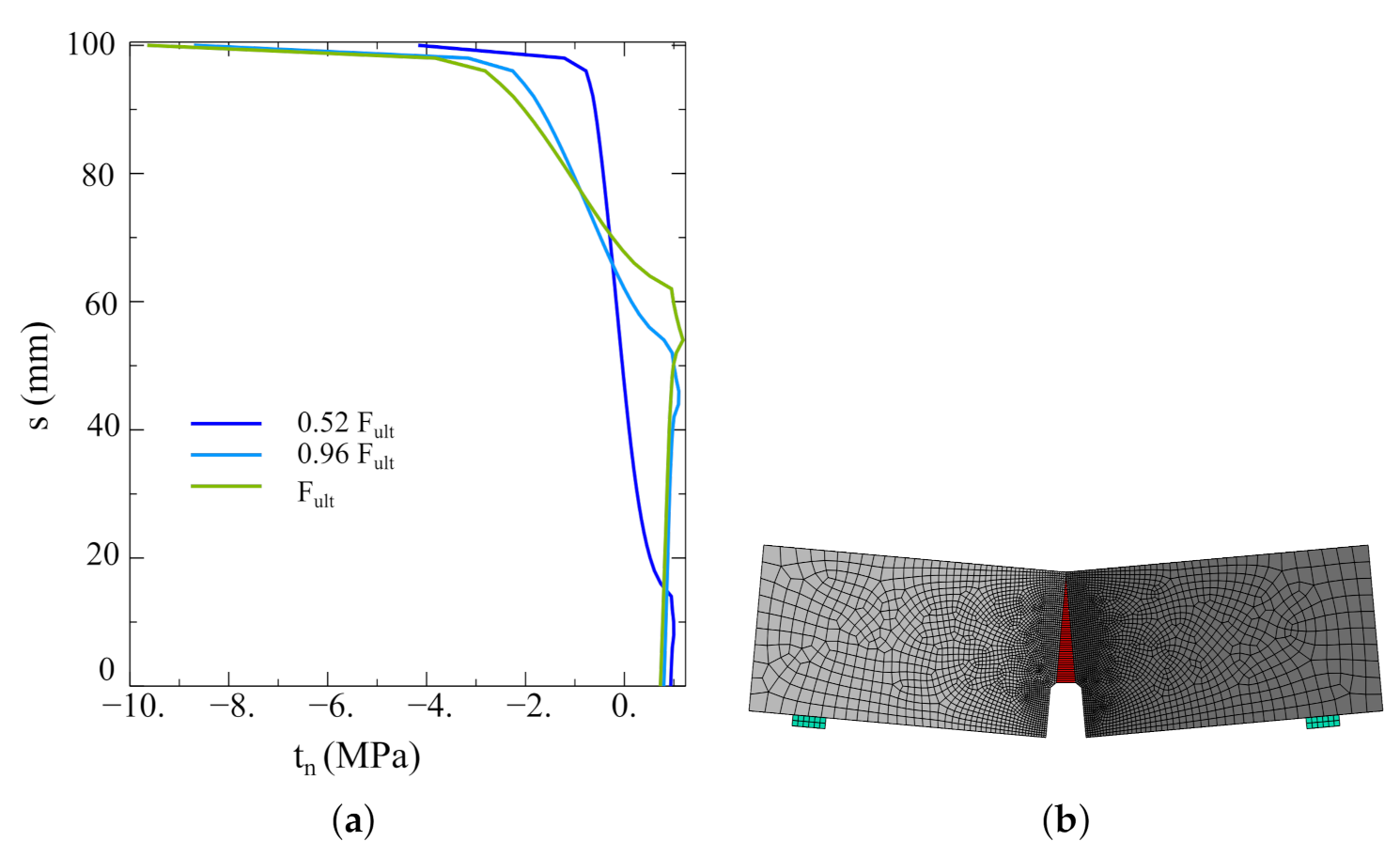
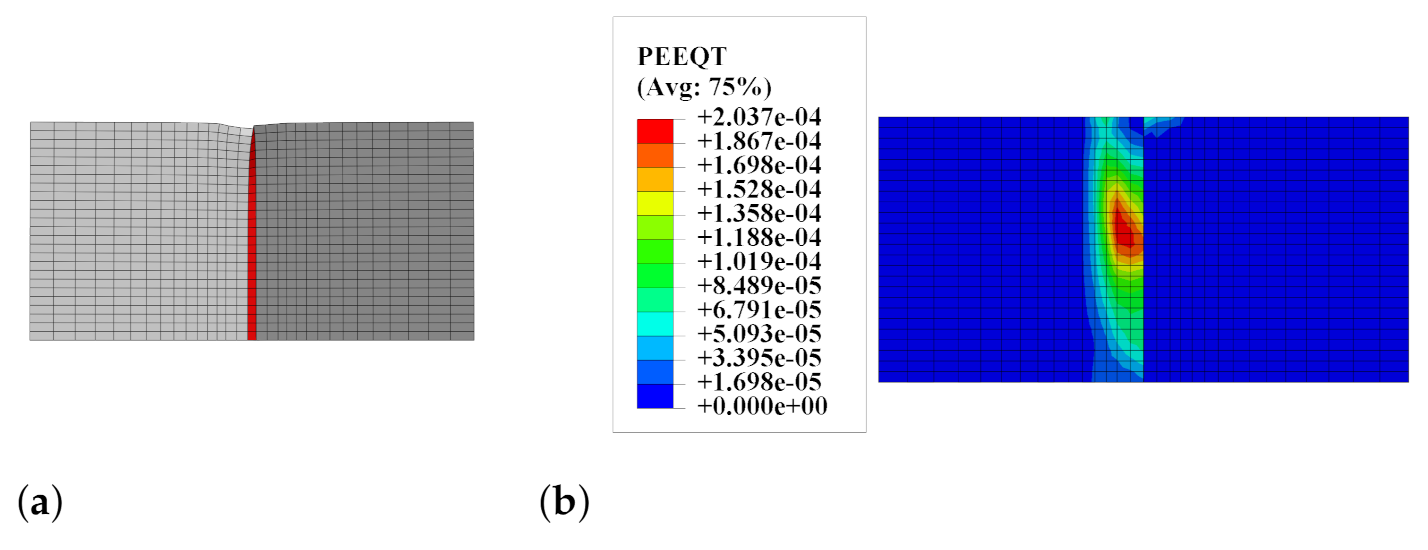
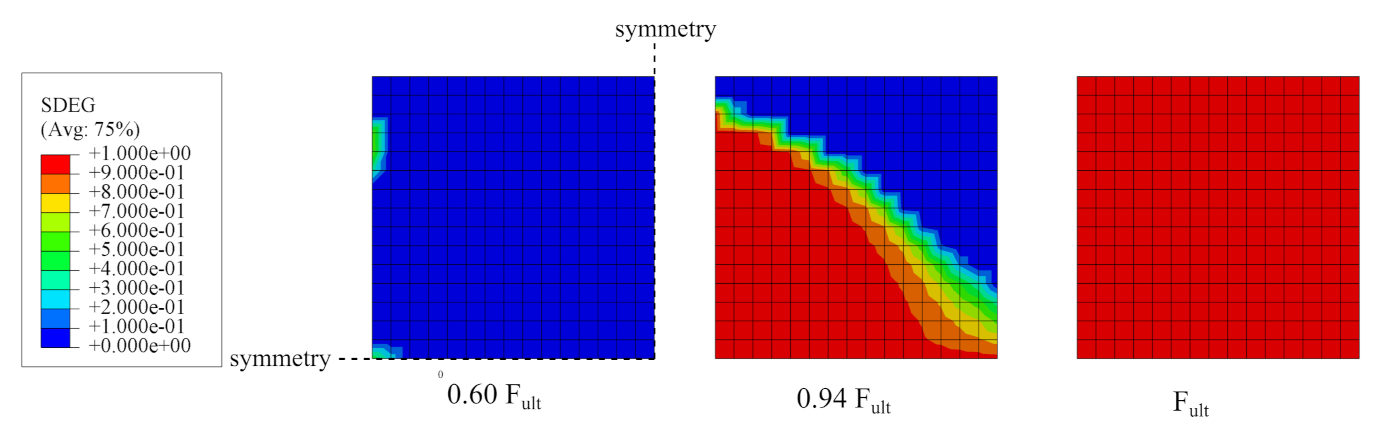
Besides, the fully non-linear simulation of the most popular laboratory tests aimed at determining the interface strength gave a better insight in the specimen’s behaviour under loading. The simulation for the three-point bending test of the notched beam showed the progressive delamination in the interface, cf.
Figure 12. Such a phenomenon can be examined using modern optical measurement techniques [
27]. On the contrary, such techniques fail in monitoring fracture process for other analysed tests (the splitting and slant-shear tests) due to the brittle failure mode of such specimens [
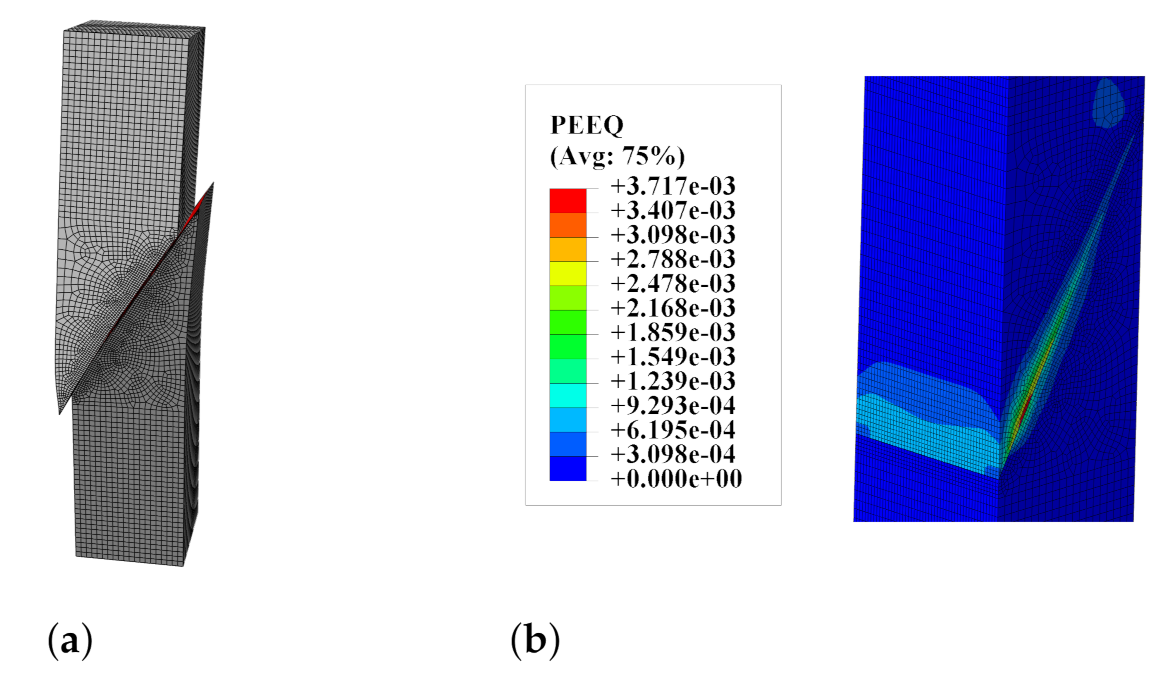
23]. Therefore, the numerical methods are appropriate tools to understand their behaviour in depth. In the present research, the characteristic features of their failure modes were reproduced, such as the mixed failure mode for cubic specimens in the splitting test—see
Figure 16—as well as the formation of chipping regions in the slant-shear test—see
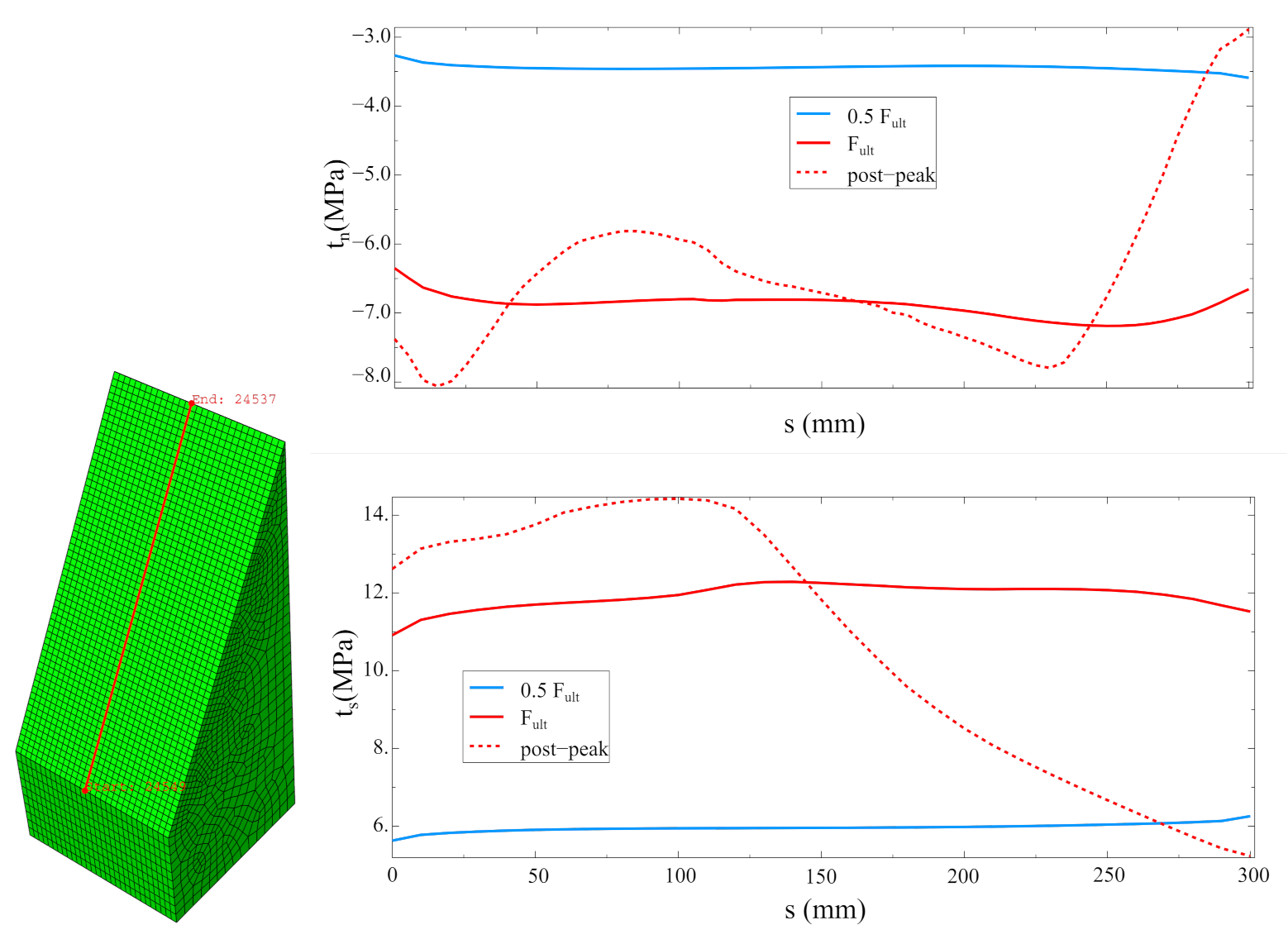
Figure 17. Moreover, the traction distributions along the interface in different stages of the tests were shown—see
Figure 22.
The limitation of the presented approach is the inability of the model to cover the residual strength envelope caused by the shear–friction phenomenon and the irreversible (plastic) slip since the default traction–separation material model was formulated in the framework of damage-elasticity without the plastic part. These issues can be overcome by the implementation of the traction–separation law within the
UMAT or
UEL user procedure [
57].


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}