1. Introduction
With development of nuclear, aviation, and power plant industries, which require high reliability and safety, the importance of flaw detection is increasing for safety diagnosis and integrity evaluation of structures. For this, ultrasonic inspection has been widely used; however, it is difficult for conventional ultrasonic flaw detection technologies to detect partially closed micro-scale defects caused by stress corrosion or thermal fatigue for which the crack surface has formed a contact interface due to thermal expansion or external stress. This limitation is because conventional methods are based on linear wave propagation and mostly use the amplitude change of ultrasonic waves reflected at or transmitted through the defect surface. However, the amplitude change at a closed interface is not significant and is difficult to detect. To solve this problem, nonlinear ultrasonic methods based on contact acoustic nonlinearity (CAN) have been studied [
1].
CAN is a phenomenon in which harmonic waves are generated due to a temporary opening and closing of the interface or a nonlinear pressure–displacement relationship when ultrasonic waves are reflected at or transmitted through the contact interface [
2,
3,
4,
5]. Related theories have been studied for decades. Richardson et al. [
6] analyzed the nonlinear dynamics of a system composed of an unbonded planar interface separating two semi-infinite linear elastic media. This is referred to as the hard contact condition, where the opening and closing of the interface is the origin of the nonlinearity. However, this theory does not consider that the contact state is variable with surface state. To supplement this point, Rudenko et al. [
7] studied the soft contact condition with the distributed-microasperity model.
Later, the ultrasonic response was quantified by modeling the contact interface with a rough surface as a spring with linear and nonlinear contact stiffness [
8,
9,
10], where the contact stiffness is dependent on the static pressure applied at the interface. This was followed by experimental verification by several researchers. Drinkwater et al. [
11] put in contact two aluminum block specimens, applied pressure from both sides, and analyzed the reflected wave at different excitation frequencies (4 MHz to 17 MHz) to confirm the frequency dependence and the relationship between the reflectivity and the contact stiffness by increasing the static pressure. Nam et al. [
12] carried out similar experiments but used an ultrasonic wave that was obliquely incident on the contact interface. Furthermore, Biwa et al. [
13,
14] tested the contact interface by pressing together two aluminum blocks with surface roughness and measured the contact stiffness against static pressure at the interface with different roughness values. The dependence of the second-order harmonic amplitude on the incident wave amplitude was verified experimentally only on a relatively smooth contact interface (the surface roughness Ra ≤ 1 μm).
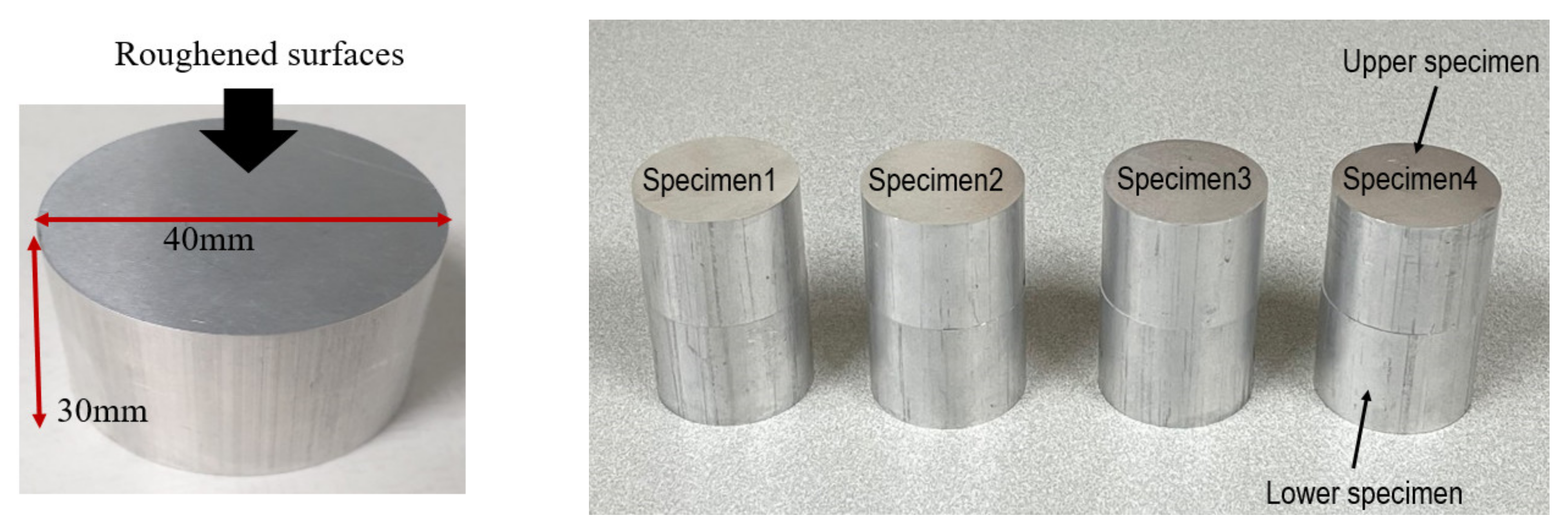
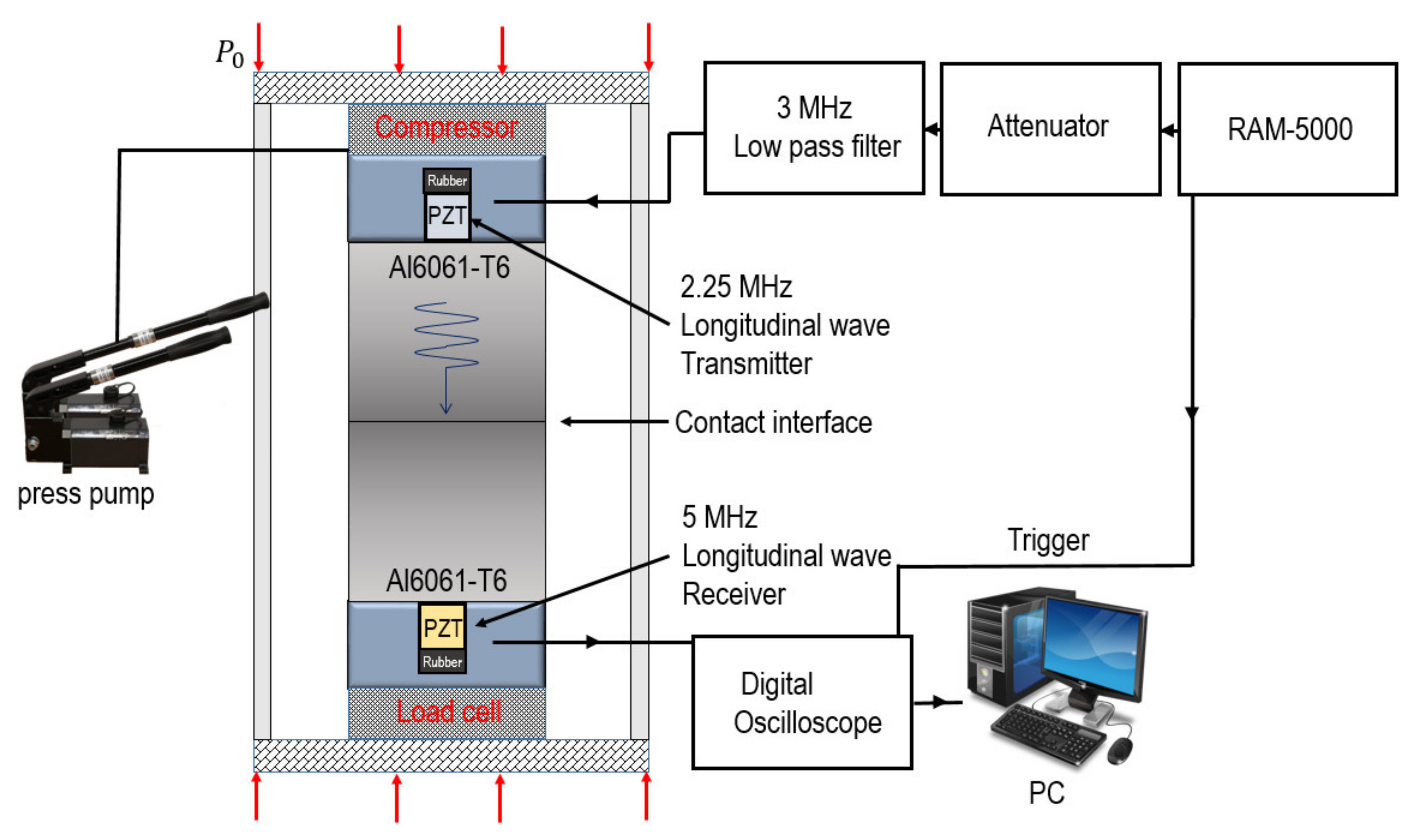
Therefore, in this study, we tried to confirm experimentally whether the CAN theory can be applied to a rough contact interface. To do this, four sets of two aluminum blocks with different surface roughness values (Ra = 0.179 to 4.524 μm) at the contact face were prepared. Two aluminum block specimens were put in contact, and static pressure was applied from both sides. The transmitting transducer was placed on one of the pressing surfaces, and the receiving transducer was placed on the other to receive the ultrasonic waves transmitted through the contact interface. While increasing the static pressure to 80 MPa, the change in transmission efficiency was measured to estimate the linear and nonlinear interfacial stiffness values expressed as a power function of pressure. From this, the amplitude of the second harmonic generated by CAN was obtained based on Biwa’s theory and compared with the experimental results. Since the contact interface of an actual crack, such as a stress corrosion crack or fatigue crack, can be very rough, this study will be useful by confirming that the CAN theory can be applied to detect actual closed cracks.
Additionally, second harmonics can be generated by inherent material nonlinearity or by measurement system nonlinearity [
15]. Therefore, a theoretical prediction that does not consider those extra harmonic components will show a difference from the experimental results. In this study, such a difference was verified by conducting a separate experiment for conditions without the CAN effect (using a single specimen without an interface), showing that the difference was due to nonlinearities other than those caused by the CAN effect.
In addition, since it is difficult to experimentally test the contact interface in various contact states, a numerical analysis approach that can replace the experiment will be useful. Therefore, in this study, numerical analysis using the finite element method (FEM) was performed, and it was determined whether the results fit well with the theoretical results.
The remainder of this paper is organized as follows.
Section 2 presents a brief description of the CAN theory with the theoretically estimated transmission efficiency and second harmonic amplitude according to variations of contact pressure.
Section 3 describes the FEM modeling and simulation results.
Section 4 describes the fabrication process used to create test samples, as well as the experimental setup. It also compares our experimental results with the results of the theoretical prediction and FEM simulation.
Section 5 presents our conclusions, the limitations of the current study, and suggestions for future works.
2. Contact Acoustic Nonlinearity at a Contact Interface
2.1. Theory
The longitudinal wave propagation through a contact interface with roughness can be analyzed using a spring model, as shown in
Figure 1. Since the details of this theory are well described in the literature [
5], it is only briefly introduced here. When pressure is applied to such an interface, large asperities collide and deform, producing elastic and plastic deformation. Therefore, the pressure–displacement relationship becomes nonlinear and can be expressed as follows:
Here,
P and
h are the pressure and gap displacement, respectively.
P0 is the static contact pressure, and h
0 is the initial gap at
P0, i.e.,
P0 =
P (
h0).
K1 and
K2 are the linear and nonlinear interfacial stiffness, respectively, and can be defined as follows from Equation (1).
Considering one-dimensional propagation, the approximate solution of the transmitted wave can be obtained as displacement for a harmonic wave as follows [
16].
Here, A0 is the displacement amplitude of the incident wave, c is the longitudinal wave velocity, is the density of the material, is the angular frequency of the incident wave, , and . The first term on the right side is the static displacement component. The second term represents the fundamental component of the incident wave frequency, which is a linear response, and its amplitude depends only on linear stiffness. The third term indicates the second harmonic component with a frequency twice that of the incident wave, and its amplitude depends not only on linear stiffness K1, but also on the nonlinear stiffness K2.
Then, amplitude
A1 of the fundamental component and amplitude
A2 of the second harmonic component in the transmitted wave can be determined from Equation (3) as follows.
Note that some terms of the amplitude of the harmonic component have been replaced by A1 in Equation (5).
Meanwhile, the transmission efficiency is defined as the ratio of
A1 and
A0, as follows.
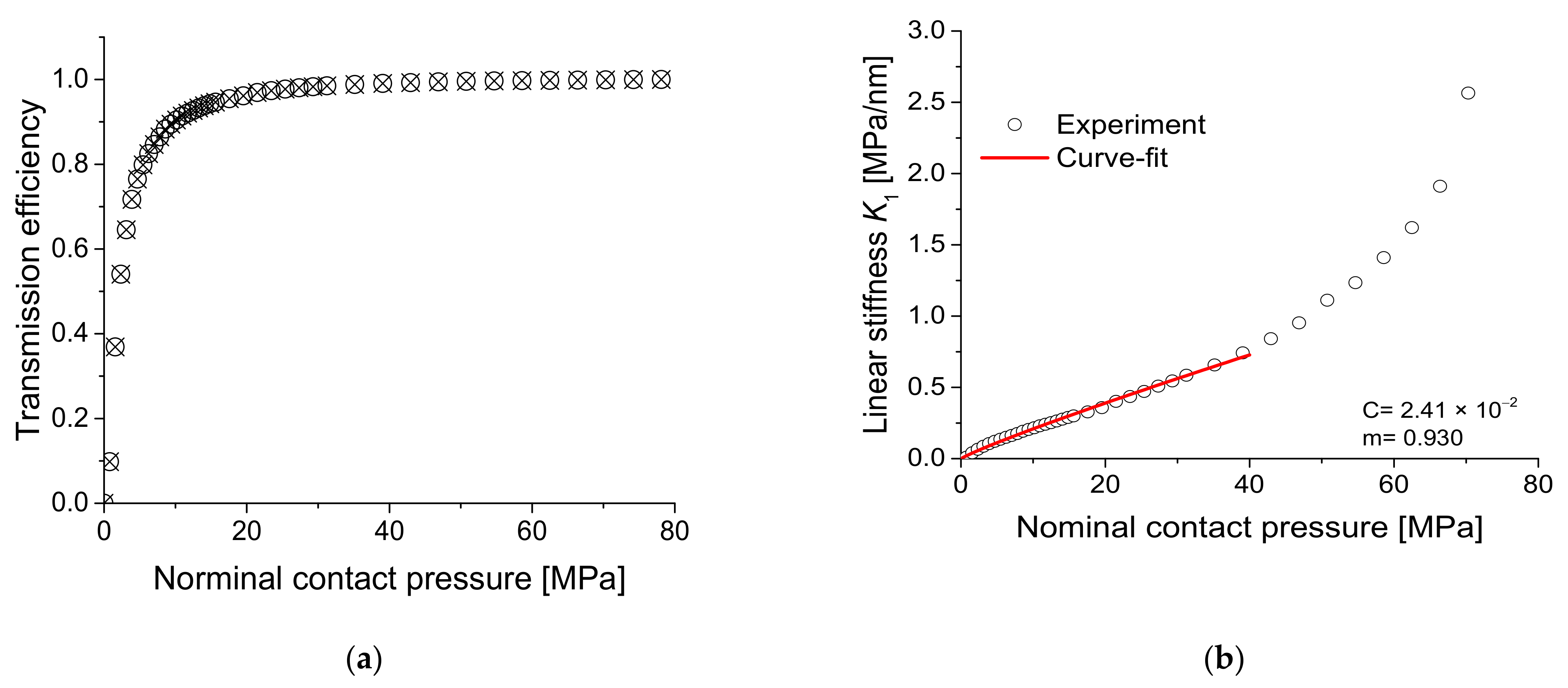
As linear stiffness
K1 increases, transmission efficiency increases. Therefore, as linear stiffness increases, the interface closes further. When
K1 increases to much greater than ρcω, the transmission efficiency converges to 1, and linear stiffness
K1 can be expressed as a power function of static pressure
, as follows [
5,
13,
14].
Here,
C and
m are positive constants related to the roughness of the interfacial surface. Substituting Equation (7) into Equation (6), transmission efficiency T is expressed as a function of pressure
. Then, the constants
C and
m can be determined by fitting the experimental results of T measured while varying static pressure
. Furthermore, the nonlinear stiffness
K2 of Equation (2) can be expressed as follows.
Therefore, Equation (1) can be rewritten as
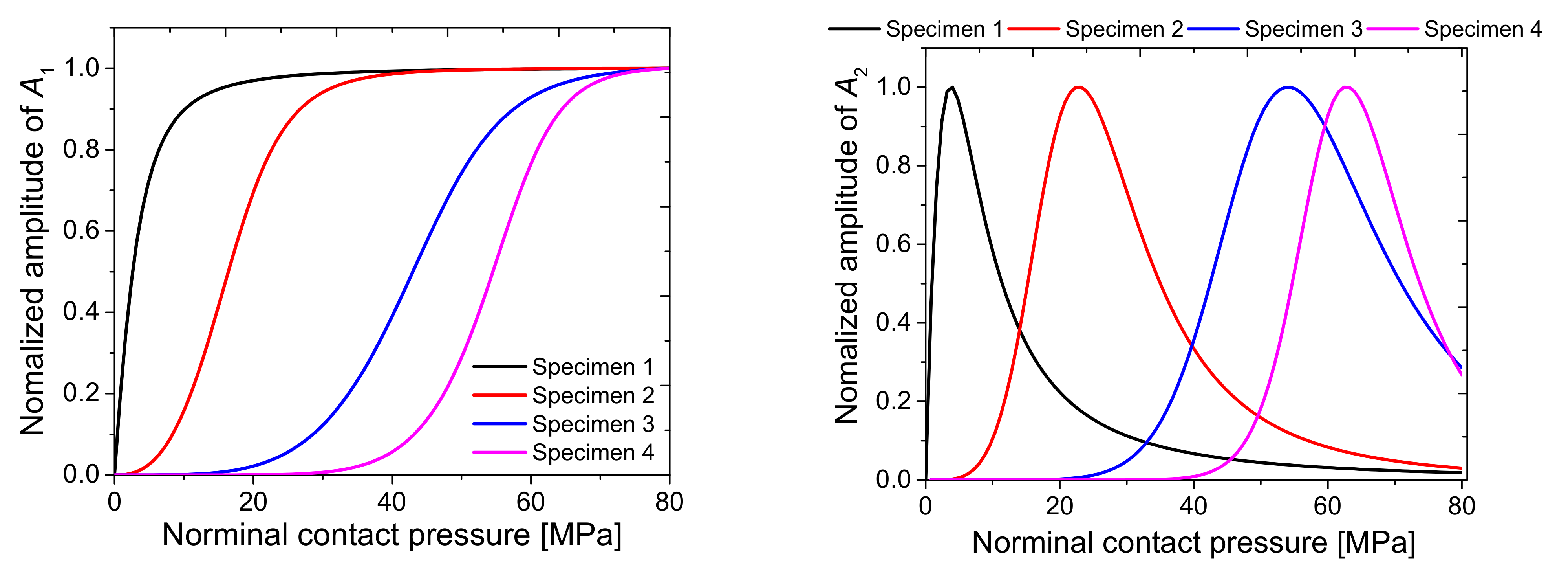
2.2. Theoretical Simulations of A1 and A2
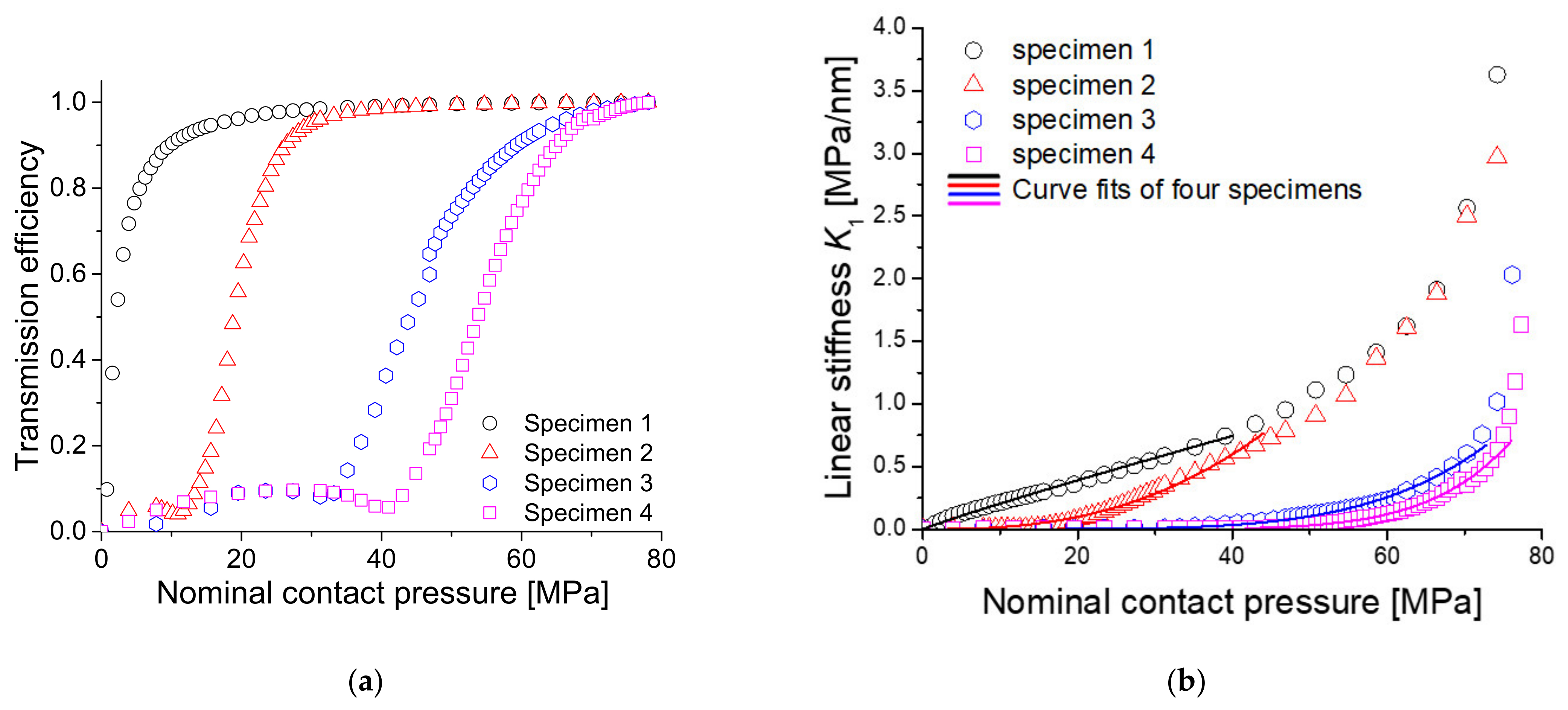
A theoretical simulation for the specimen to be tested in the experiment was conducted using the aforementioned theoretical model. In the experiment (
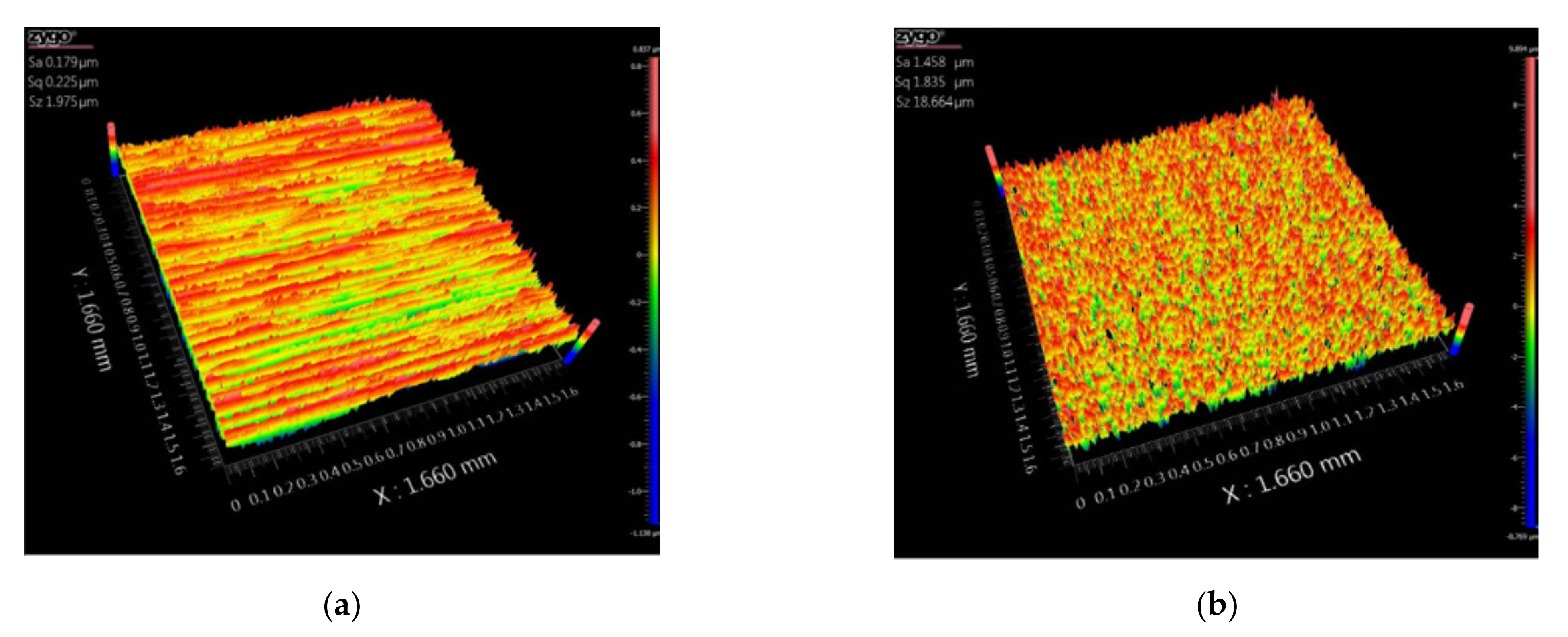
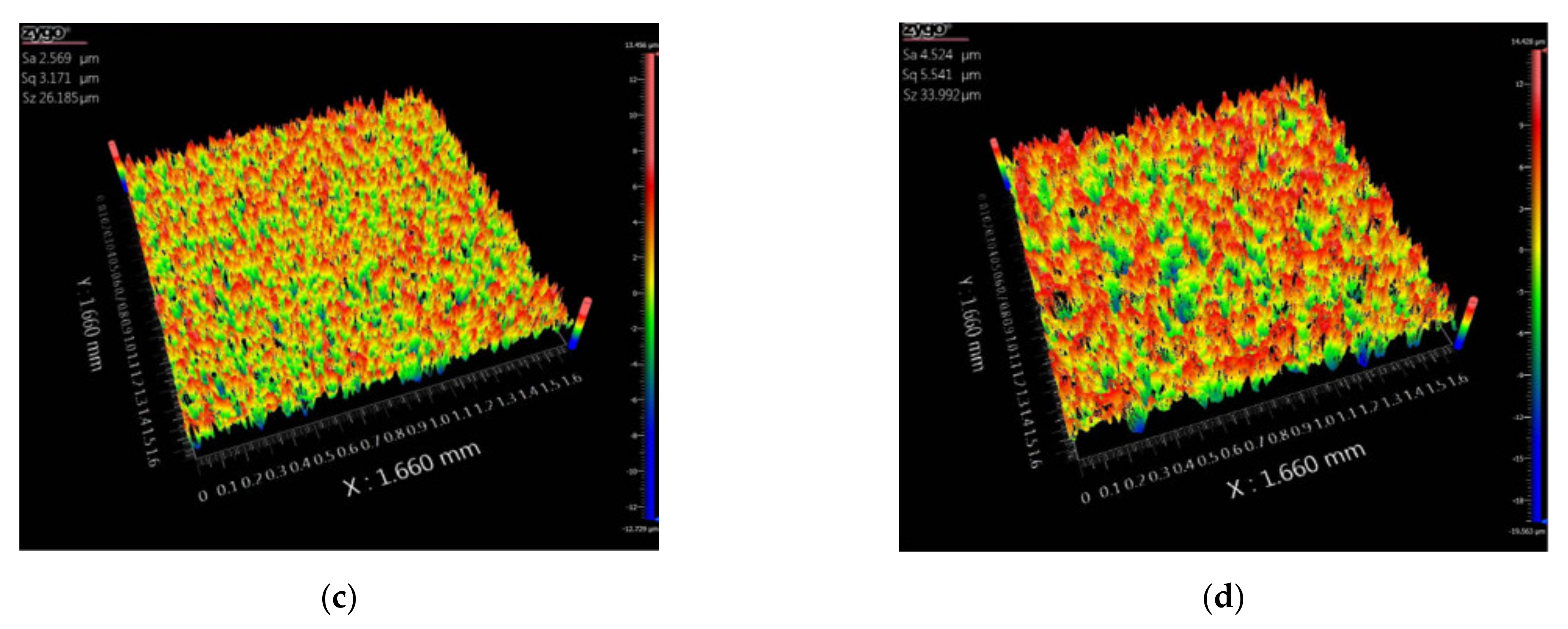
Section 4.1), four sets of specimens in which two aluminum alloy (Al6061-T6) blocks were contacted were tested, and the surface roughness of each set was varied. The interfacial surface roughness values of the specimens were Ra = 0.179, 1.458, 2.567, and 4.524 μm, respectively (
Table 1).
K1 and
K2 were obtained using the constants C and m, which were determined in the experiment (
Table 2) to calculate
A1 and
A2. Other parameters used for simulation were
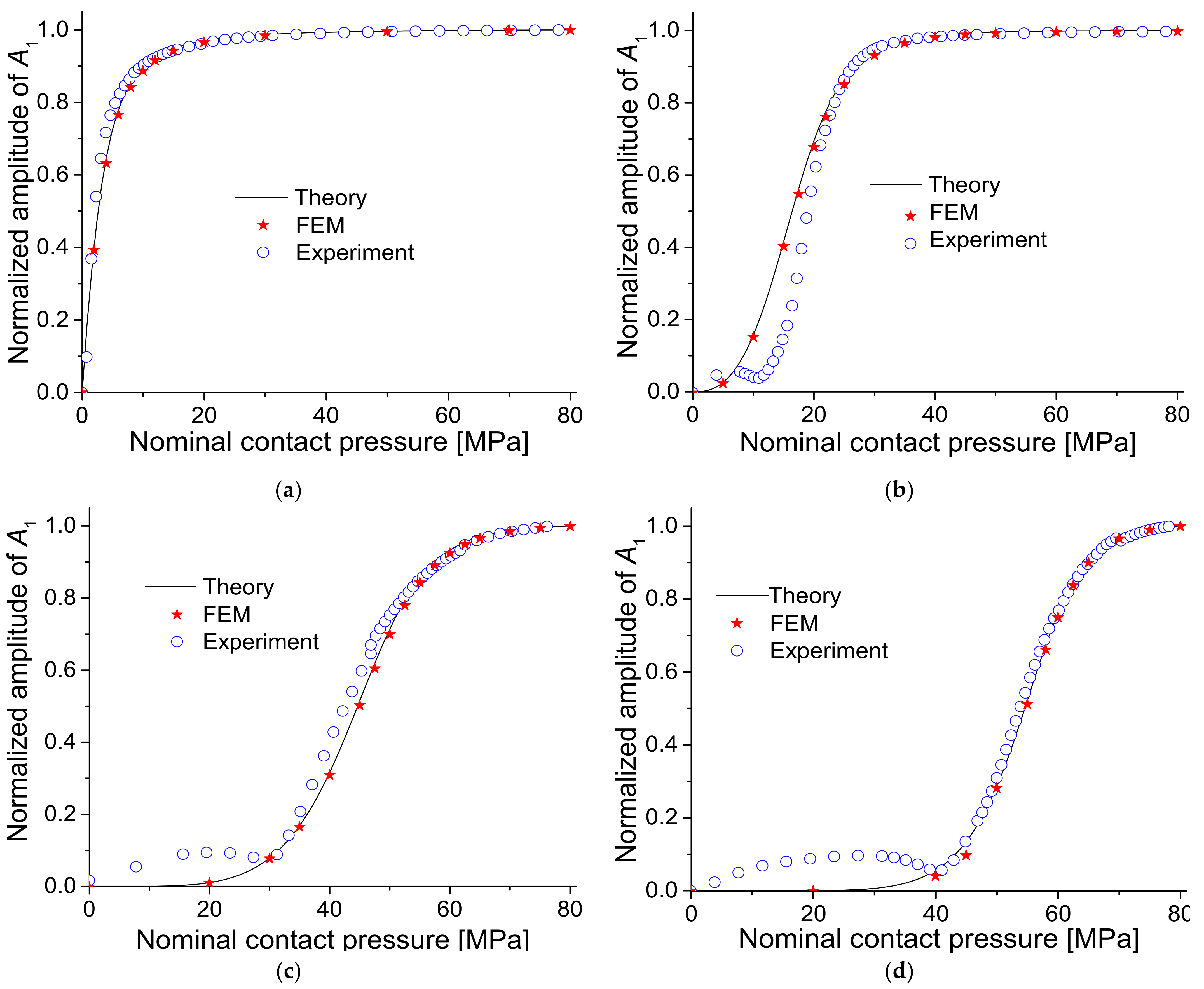
c = 6300 m/s, and frequency = 2 MHz, as in the experiment. The results are shown in
Figure 2, where the amplitudes were normalized to the maximum value.
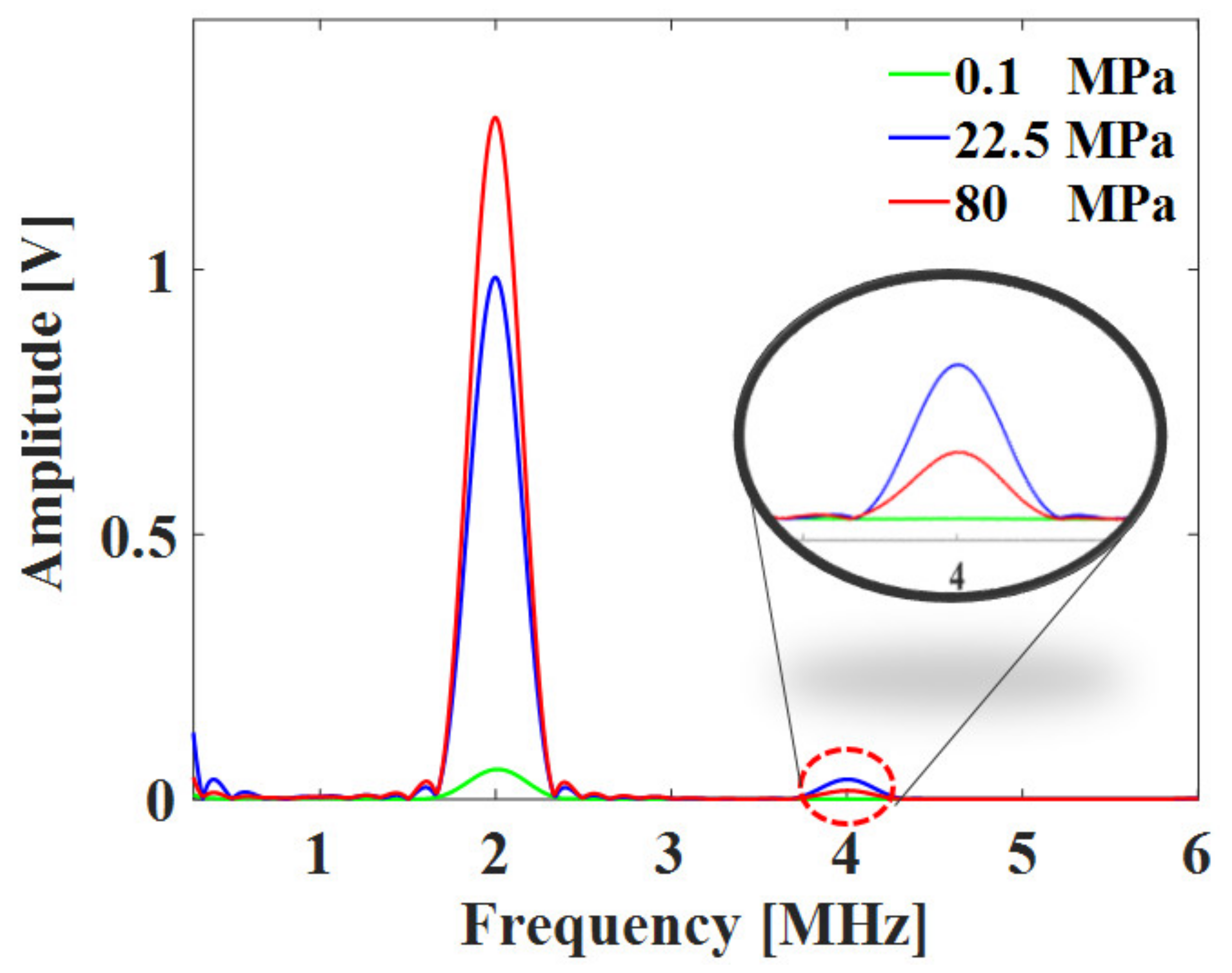
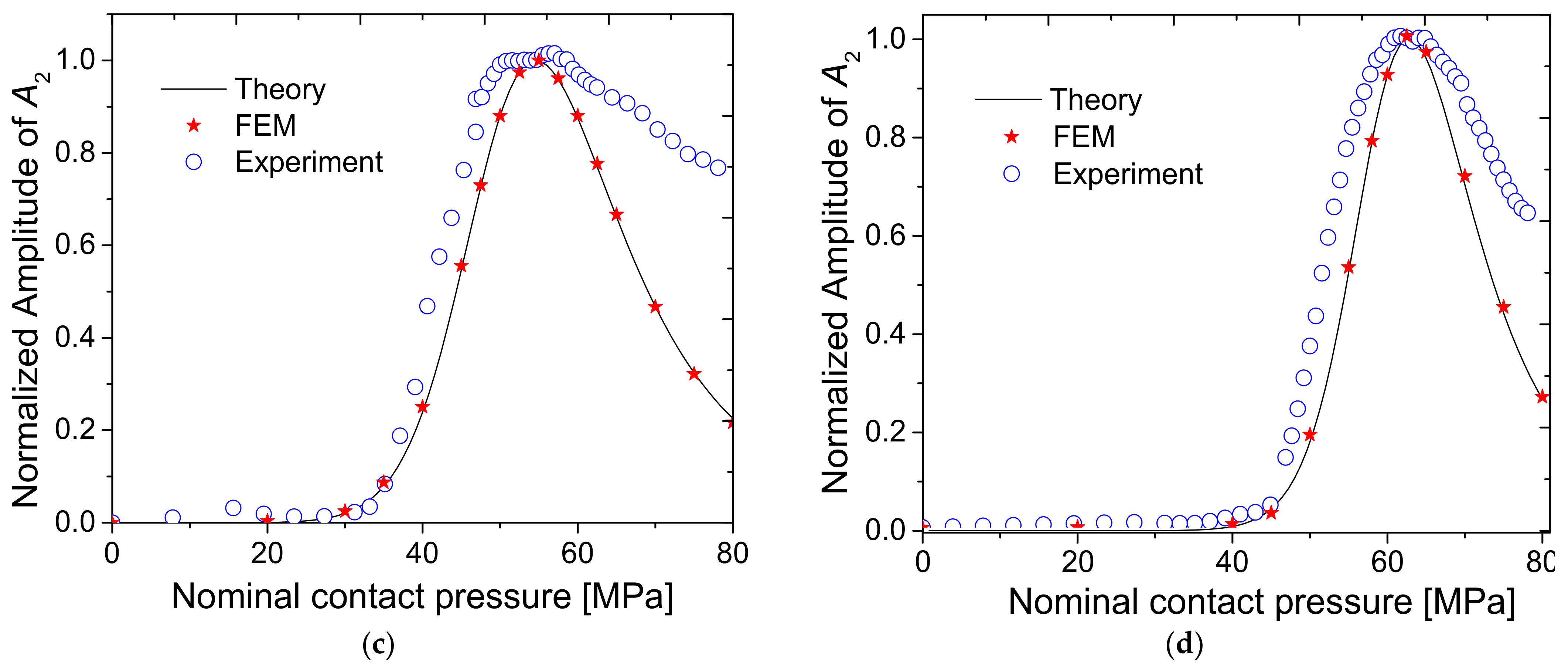
When the contact pressure is small, since the interface is open, the amplitude of fundamental component A1 is almost zero. As the pressure increases, the interface gradually closes and A1 increases. With a rougher interface, A1 starts to rise at a higher pressure. The normalized value of A1 converges to 1, which corresponds to a closed interface state, and the two specimens are considered as one body with no interface. Additionally, the rougher the interface, the greater the contact pressure when transmittance approaches 1. For second harmonic amplitude A2, a peak appears at a specific pressure, and the rougher the interface, the greater the peak pressure. This means that the CAN effect can be maximized at an appropriate interfacial gap. Additionally, the rougher the interface, the higher the pressure needed to achieve the appropriate gap.
5. Conclusions
In this paper, the theory of contact acoustic nonlinearity at an interface with roughness, in which the contact state of the interface is represented using linear and nonlinear interfacial stiffness (which vary according to contact pressure), was experimentally verified. To do this, four sets of specimens with different interface roughness values (Ra = 0.179 to 4.524 μm) were tested. One set of specimens consisted of two AL6061-T6 blocks facing each other. The second harmonic component of the transmitted signal was analyzed while applying force to both sides of the specimen set to change the contact state of the interface. The experimental results showed good agreement with the theoretical prediction, even with a rough interface. The amplitude of the second harmonic component was maximized at a specific contact pressure. Additionally, as the roughness of the contact surface increased, the second harmonic component was maximized at a higher contact pressure. The location of this maximal point was consistent in experimental and theoretical results. At high pressure, however, the interfacial stiffness was very large so that the amplitude of the second harmonic converged to zero in the theoretical results, while maintaining a constant value in the experimental results. Based on additional experiments conducted on a single specimen with the same propagation distance but no interface, this difference was determined to be caused by the nonlinearity of the material itself and the component due to the system nonlinearity.
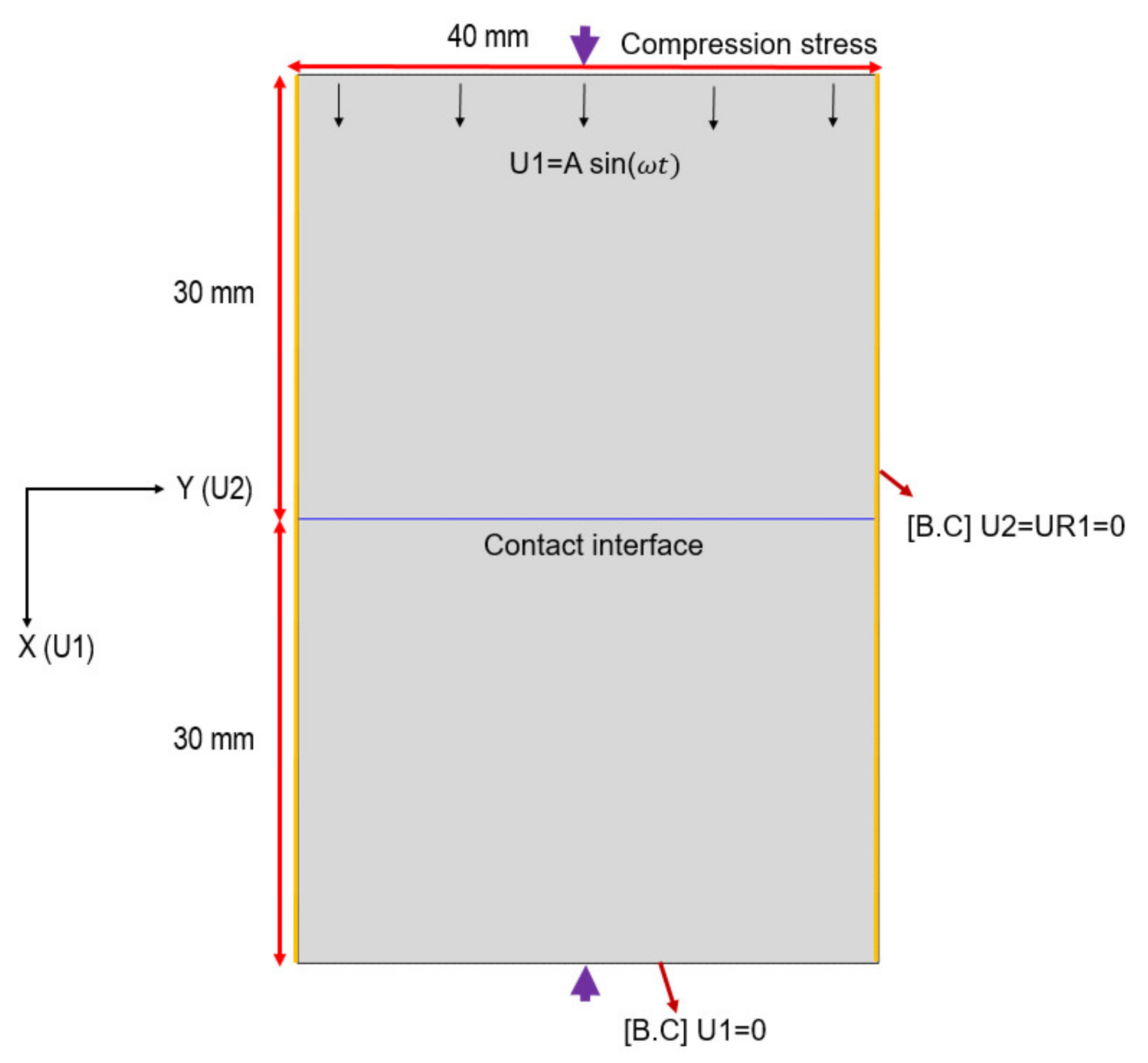
Additionally, FEM simulations were conducted in parallel, in which the contact interface was modeled in two dimensions using ABAQUS. Numerical simulation results for tested specimens were in good agreement with the theoretical predictions. The developed FEM model enables parametric studies on various states of contact interfaces.
It is very important that the magnitude of the second harmonic component be maximized at a specific pressure, and a quantitative relationship between this pressure and the gap needs to be identified in the future. In addition, higher pressure is required to demonstrate this behavior for surfaces that are rougher than those analyzed in this study.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















