
Novel Approaches to the Design of an Ultra-Fast Magnetorheological Valve for Semi-Active Control




Abstract
1. Introduction
2. Materials and Methods
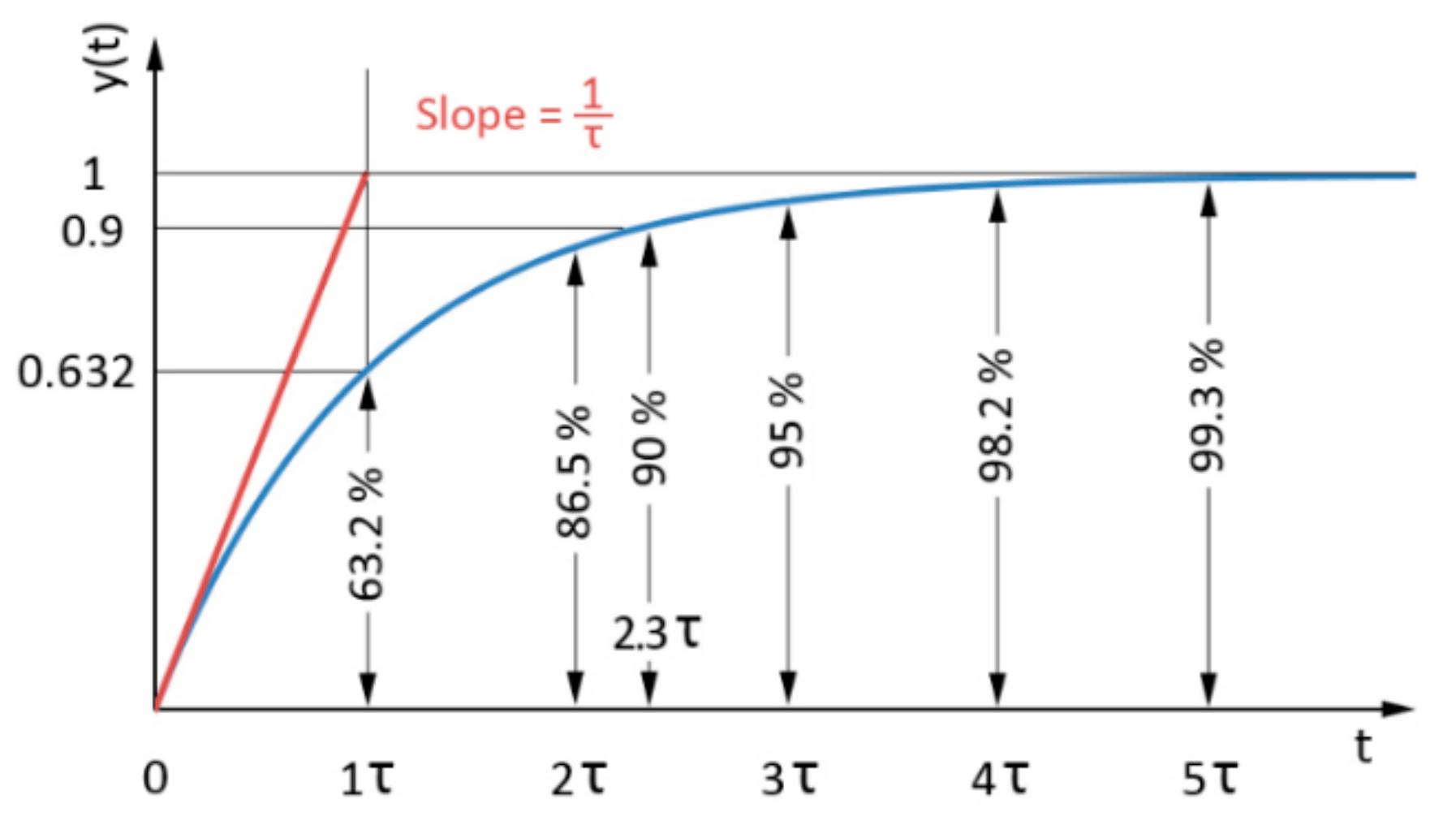
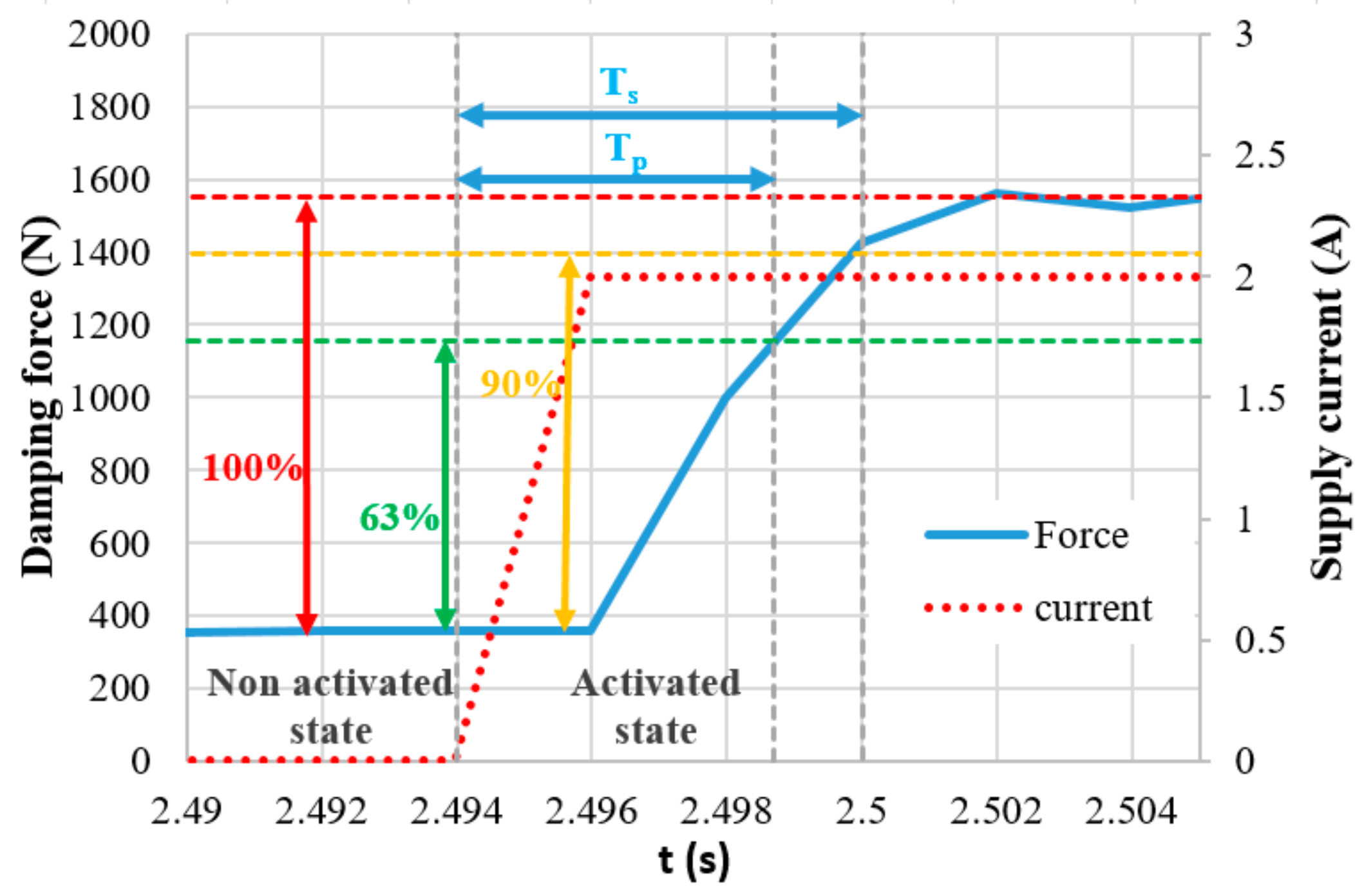
2.1. Definition of Response Time
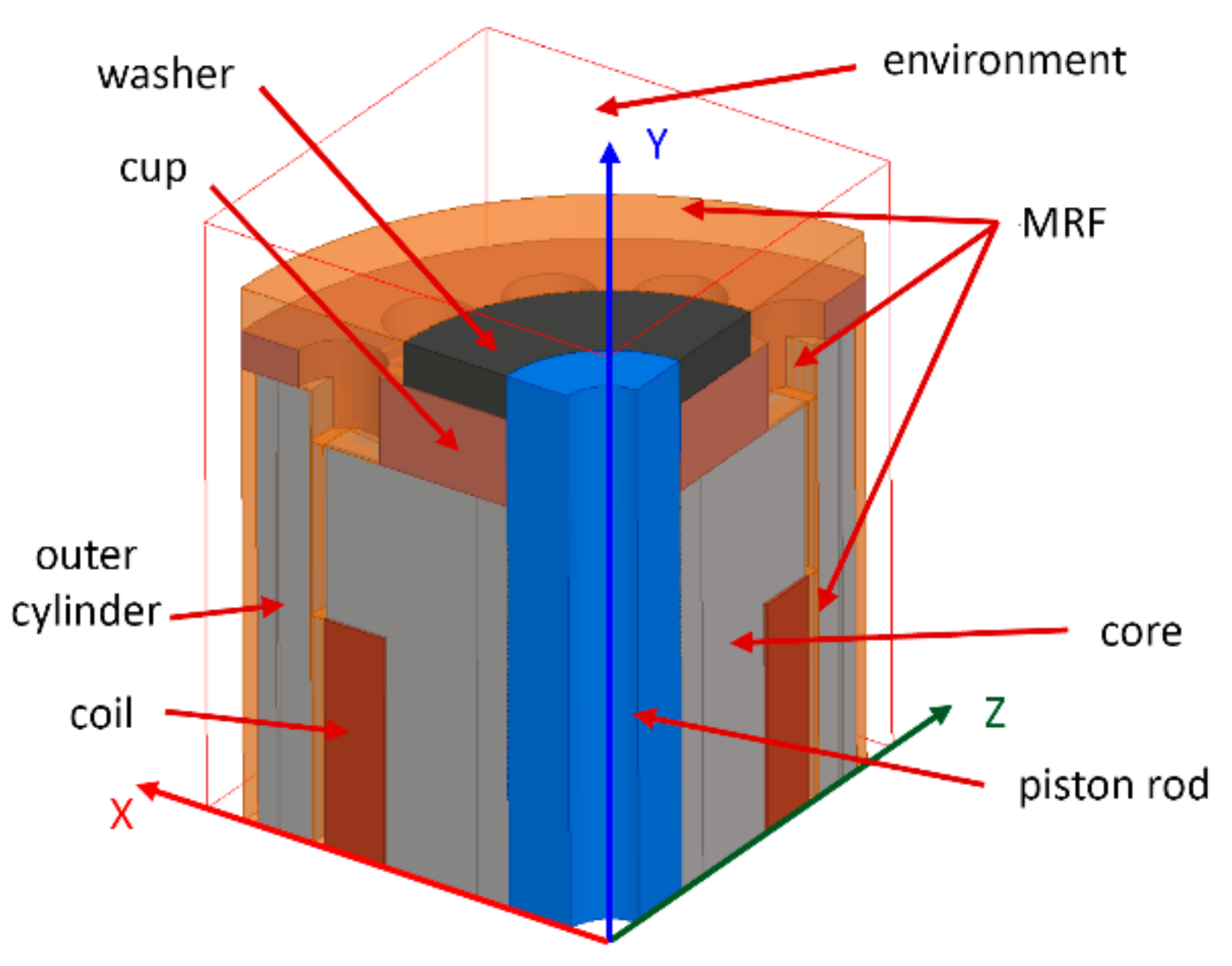
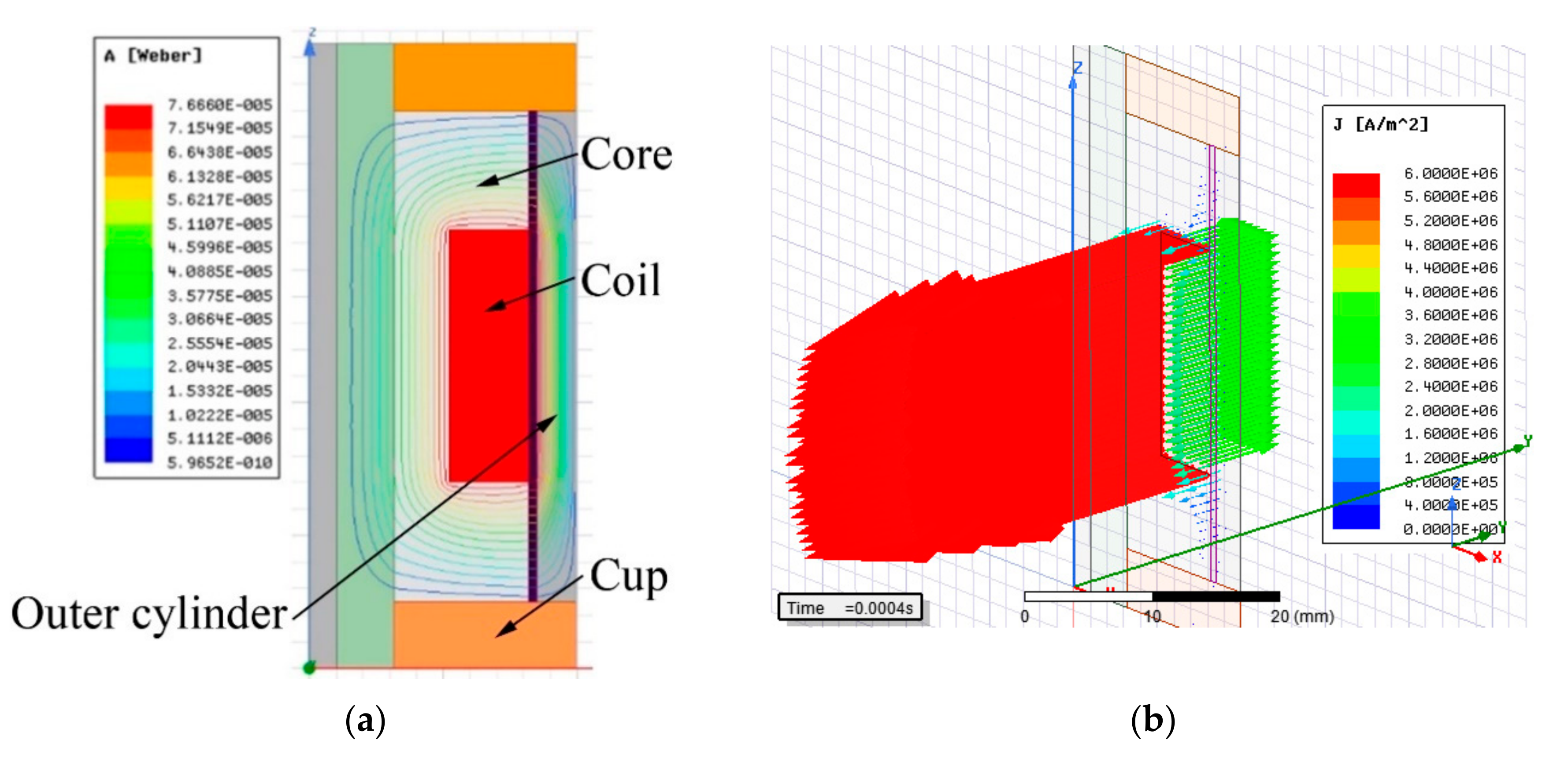
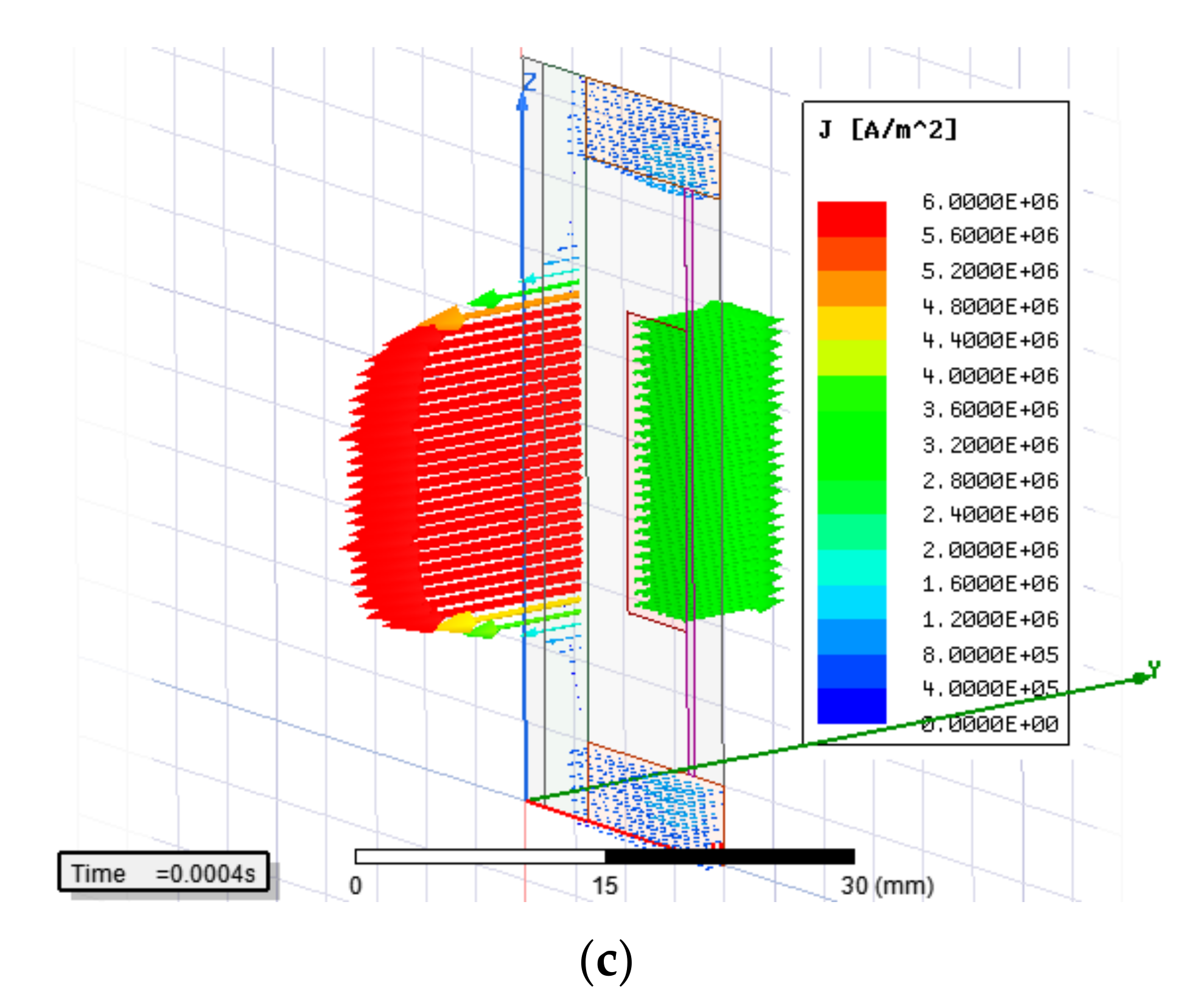
2.2. Transient Magnetic Simulation
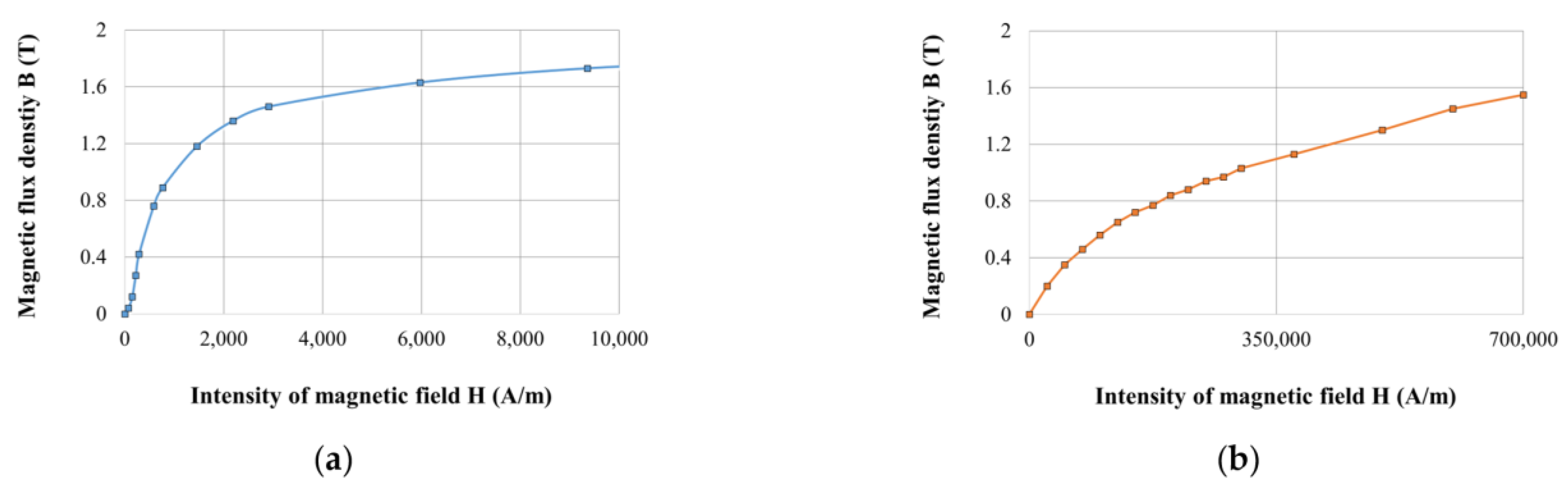
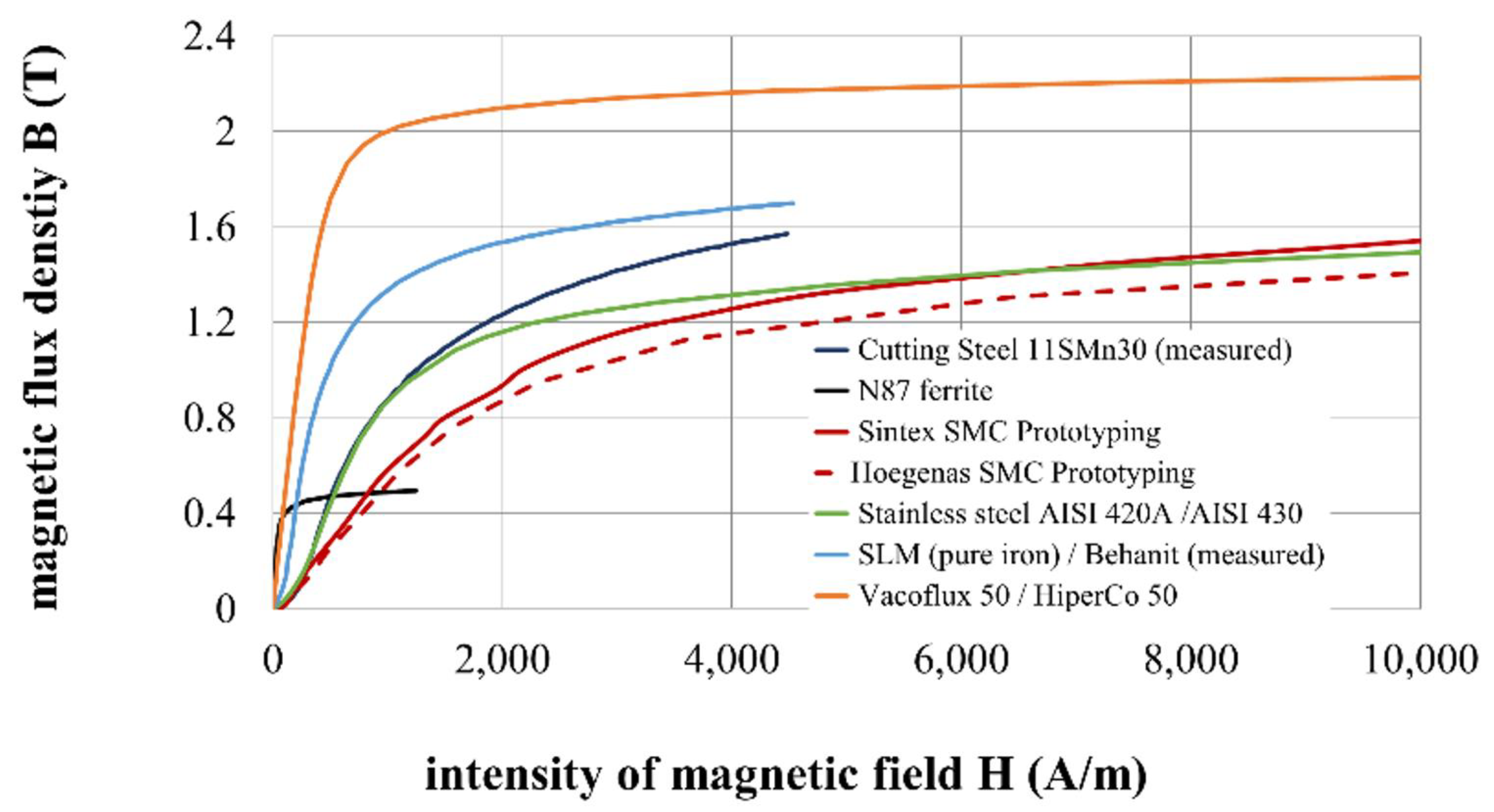
2.3. Materials for the Magnetic Circuit
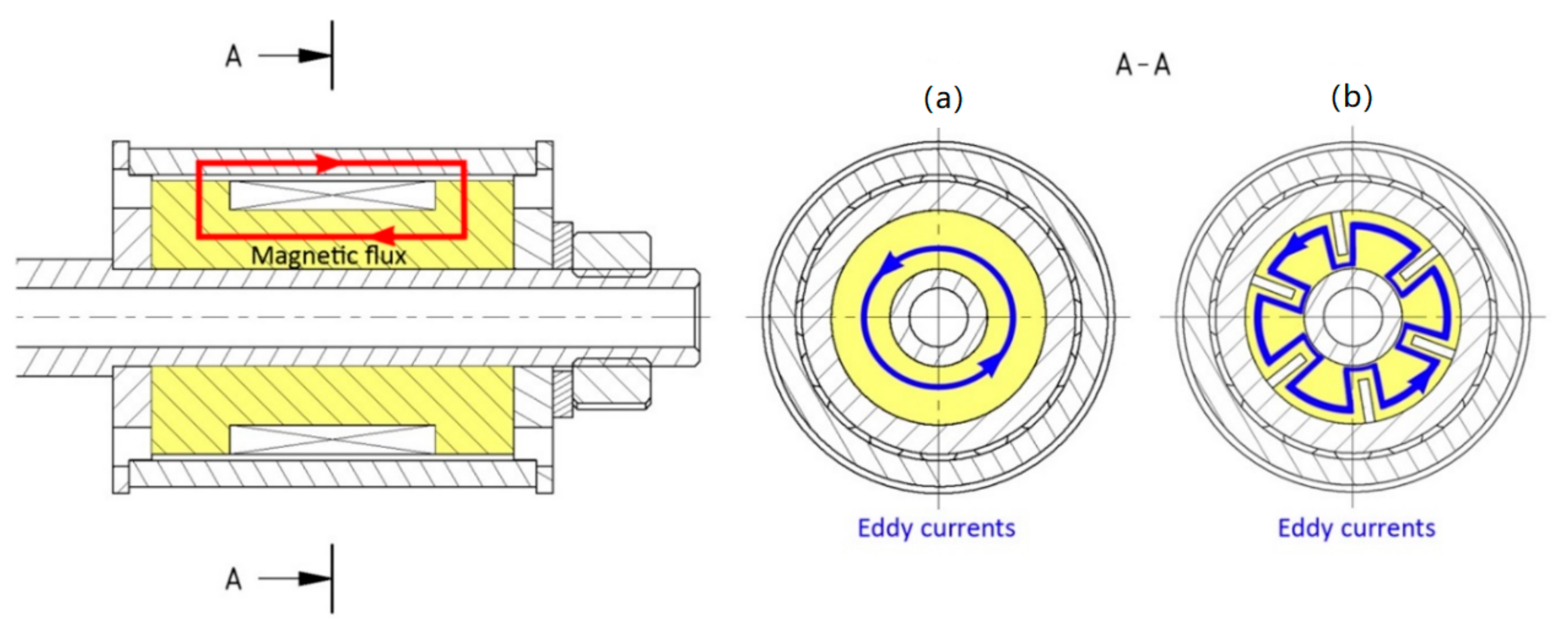
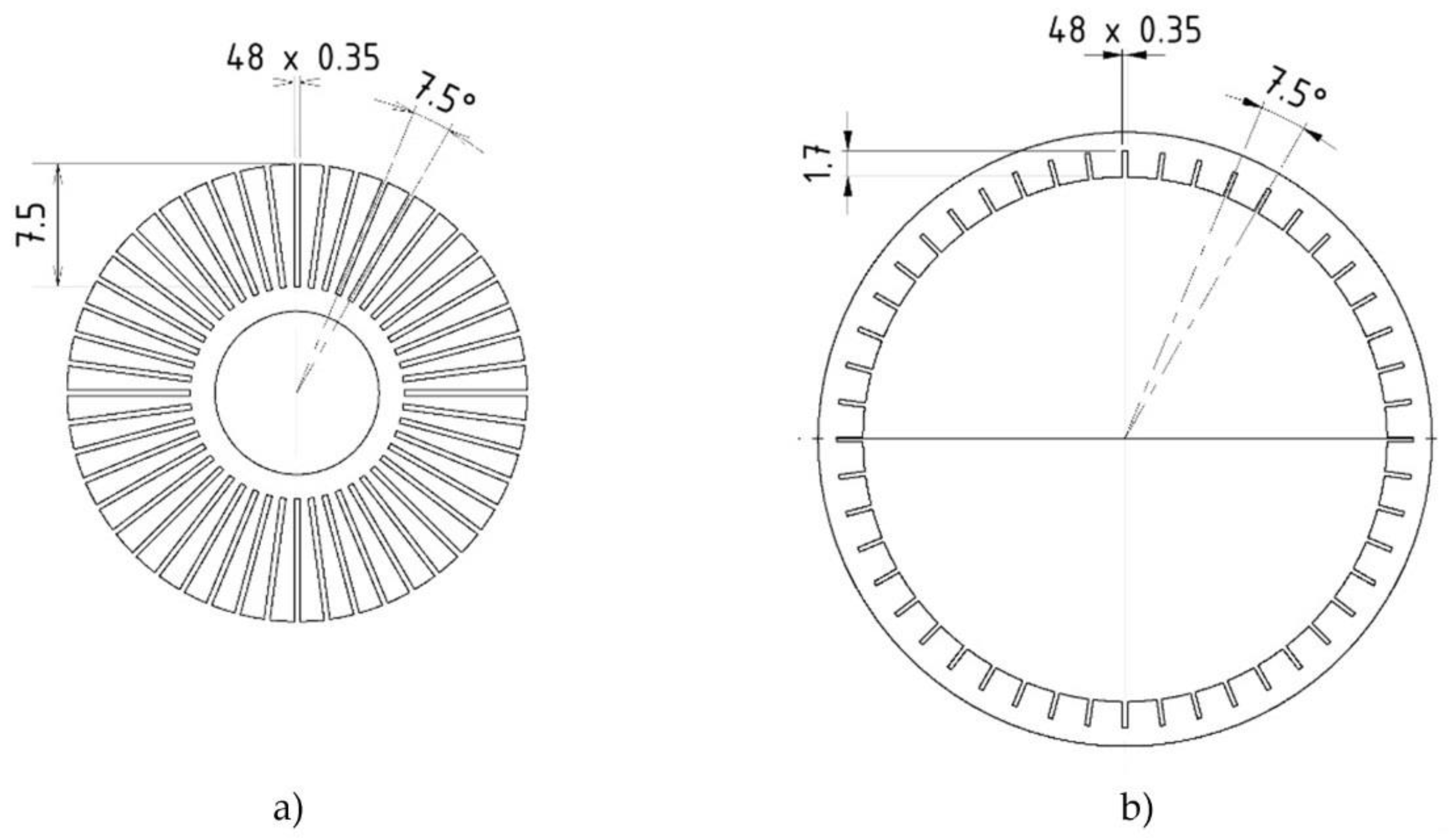
2.4. Shape Approach—Preventing the Eddy Currents by Shaping the Grooves
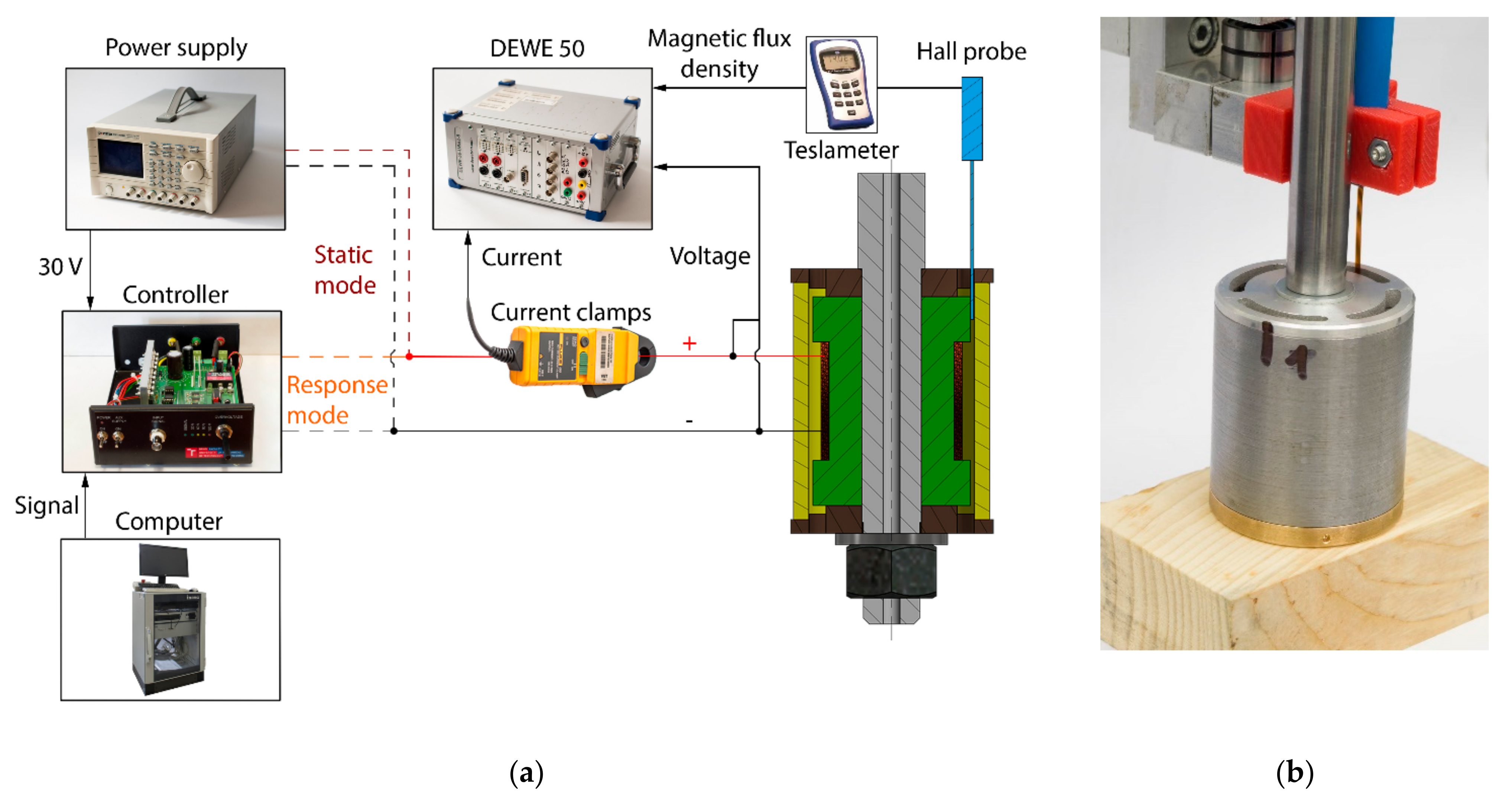
2.5. Measurement of the Magnetic Flux Density—Transient and Static Measurement
2.6. Measurement of the Damping Force—Transient and F-v Curves Measurement
3. Results and Discussion
3.1. Transient Responses of Magnetic Flux Density in the Gap with Air
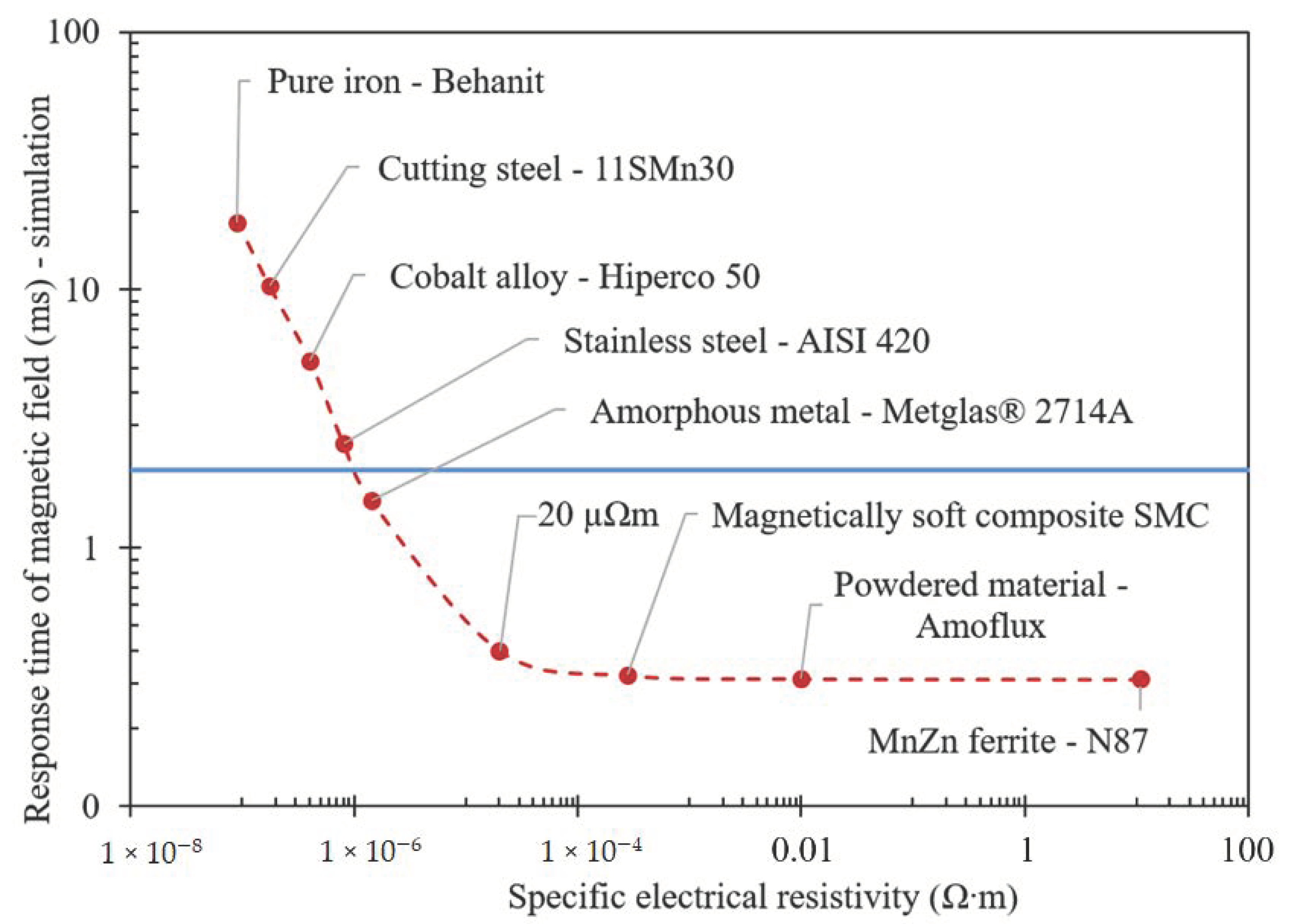
- MR valves made of ferrite materials exhibit the fastest response time. Ferrite material also exhibits the lowest remanence; however, only a small magnetic flux density can be achieved.
- Valves made of Sintex (SMC) are as fast as those of ferrite, despite a lower electrical resistivity than the ferrite. A magnetic circuit made of Sintex material achieves just as short a response time without grooves. The magnetic flux is significantly higher than in the case of ferrite.
- Vacoflux variants exhibit very high magnetic flux density and lower response time of magnetic flux density than any metal material. Six grooves reduced the response time almost to the level of the Sintex valve.
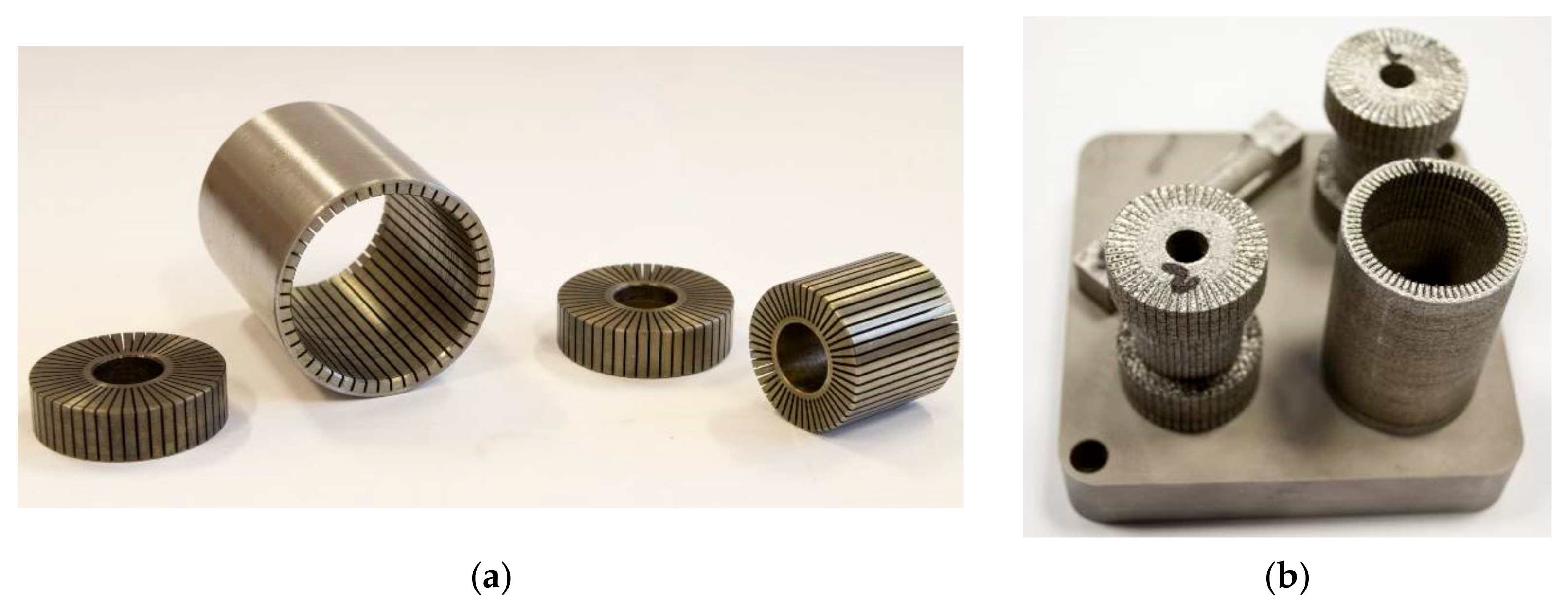
- The SLM sample (with and w/o the grooves) shows a high magnetic flux density because of the high permeability/magnetic saturation limit of the pure iron powder. The response time of the valve without grooves is the longest of all measured samples. This result was expected due to the lowest resistivity of pure iron. On the contrary, the version with grooves showed a more than 10 times shorter response time.
- The AISI 420A valve without grooves shows quite a low response time and high magnetic density, but also the highest remanence. High remanence is reducing the dynamic force range of the valve and it is also not advantageous for a fast current controller.
- In the 11SMn30 sample, an identical number of grooves as for the SLM must be fabricated in order to achieve a similar response time as the Sintex valve. The magnetic flux density is higher than in case of the Sintex valve, but slightly lower than the valve made of pure iron by SLM. During e fabrication, the parts of the magnetic circuit were cooled and the cutting speed was low in order to prevent overheating. Thanks to this, the valve exhibits low remanence and high permeability.
- There is some difference between the simulated and measured values. This is probably caused by input B-H curves and electrical resistivity of materials being taken from datasheets. Previous research has shown that the exact composition of alloys and, thus, B-H curves can differ for a smelting batch. In addition, the heat treatment and mechanical loading can change the magnetic and electrical properties. For more precise results, B-H curves and the resistivity of materials used for the circuit must be measured individually. However, the presented model is an effective tool for determining the transient behavior of a magnetic circuit.
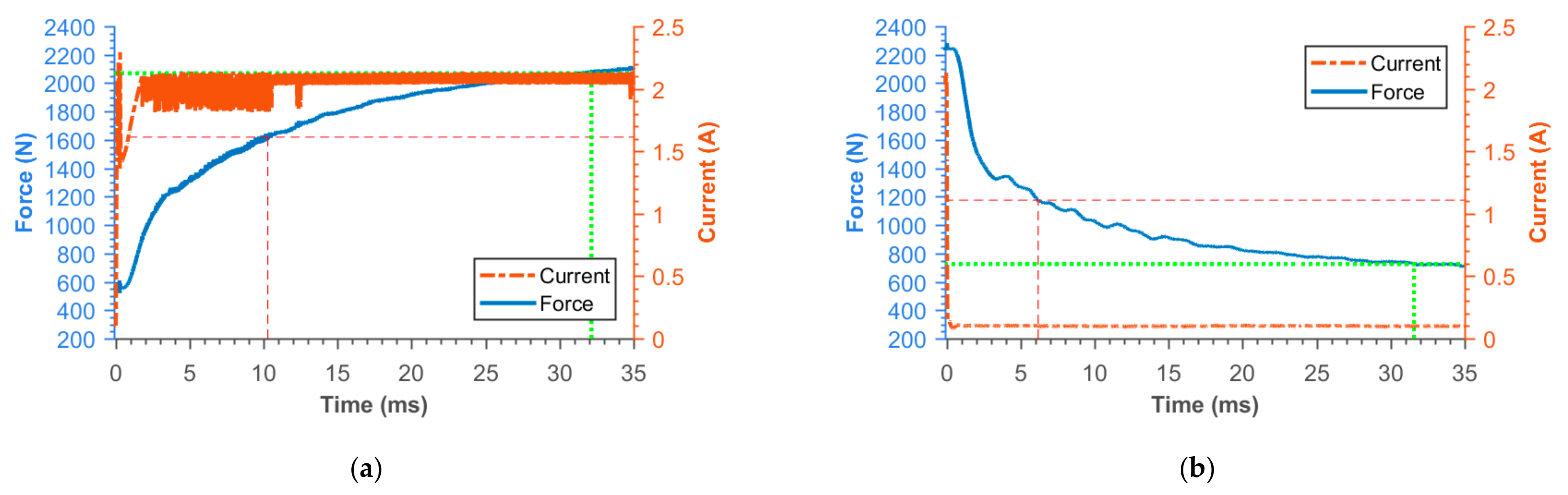
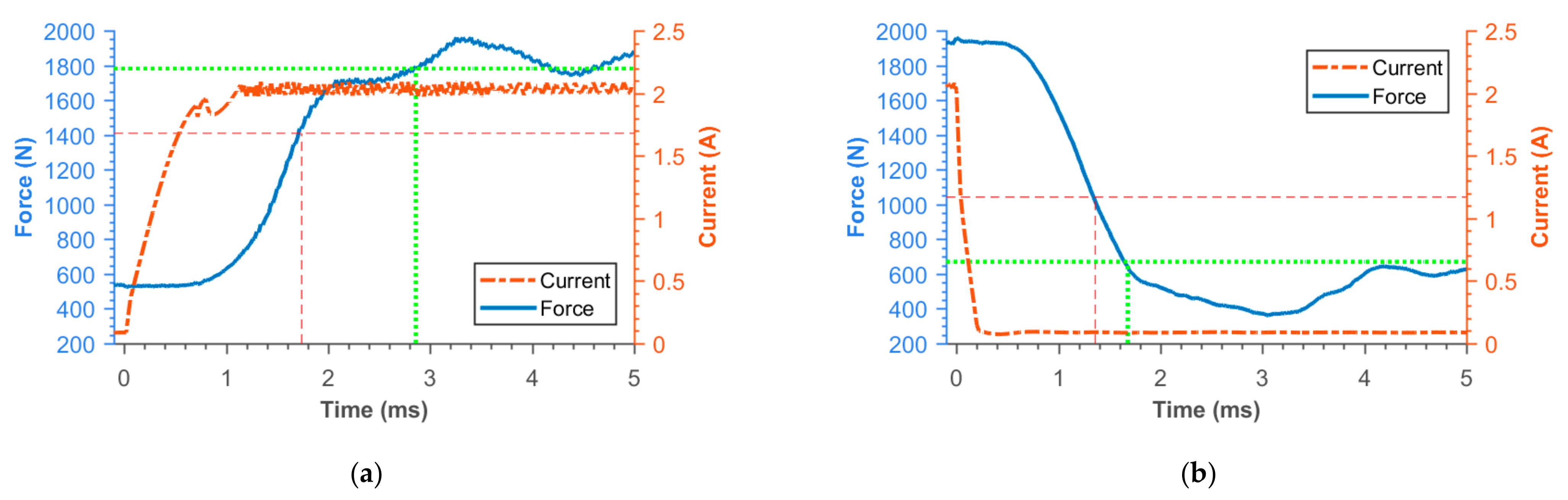
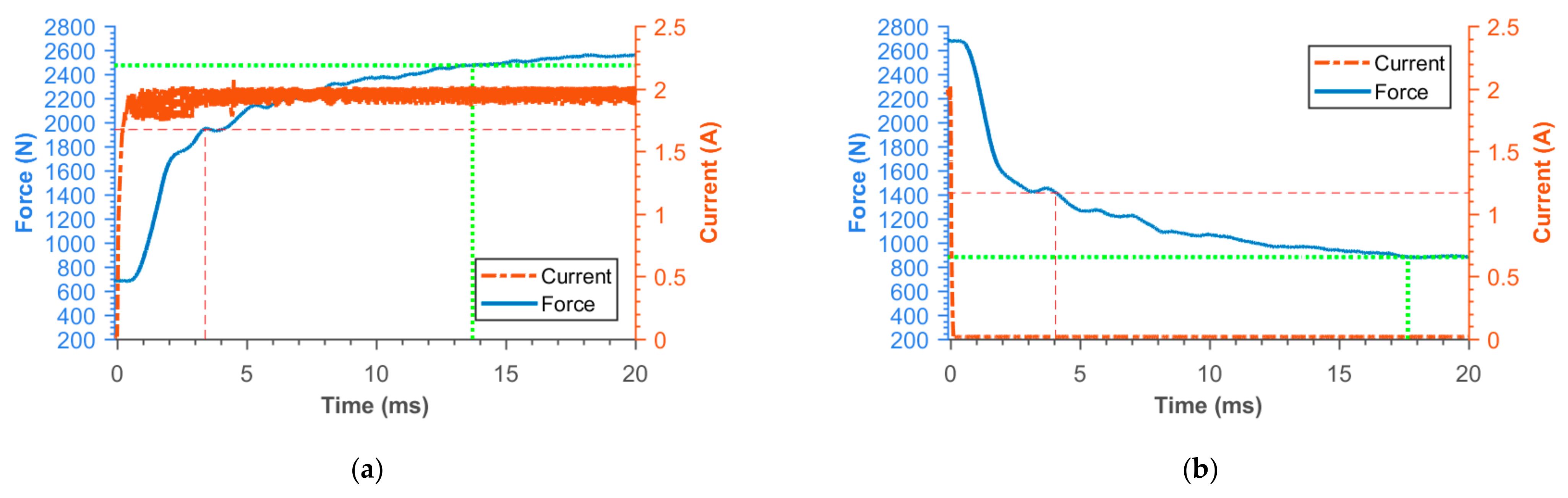
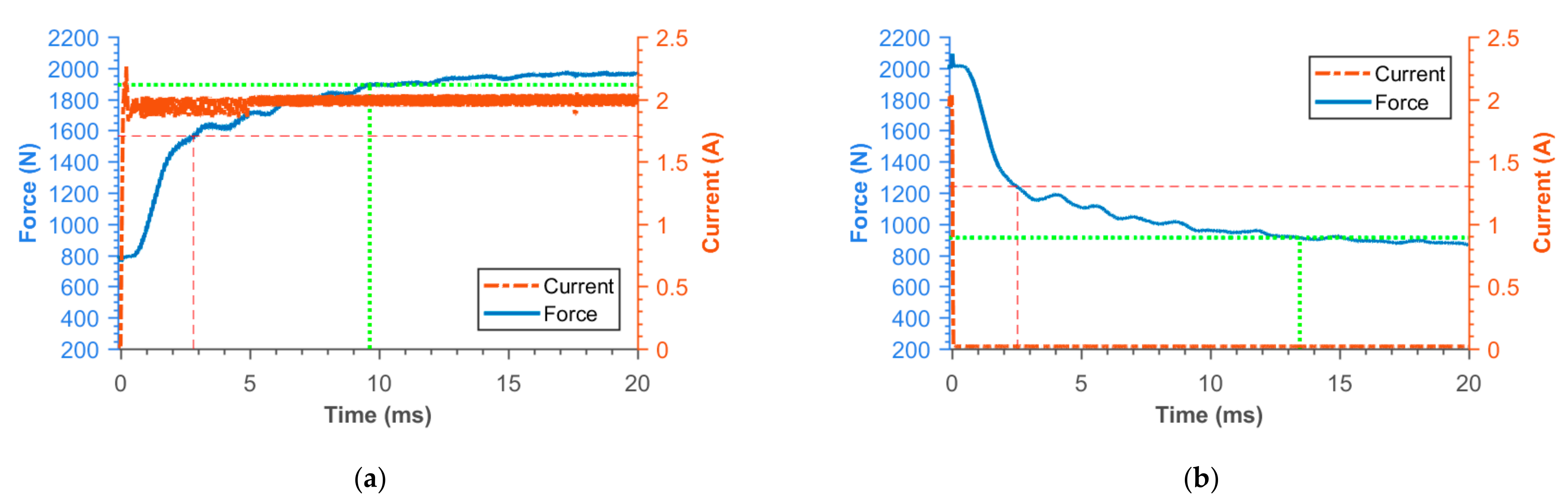
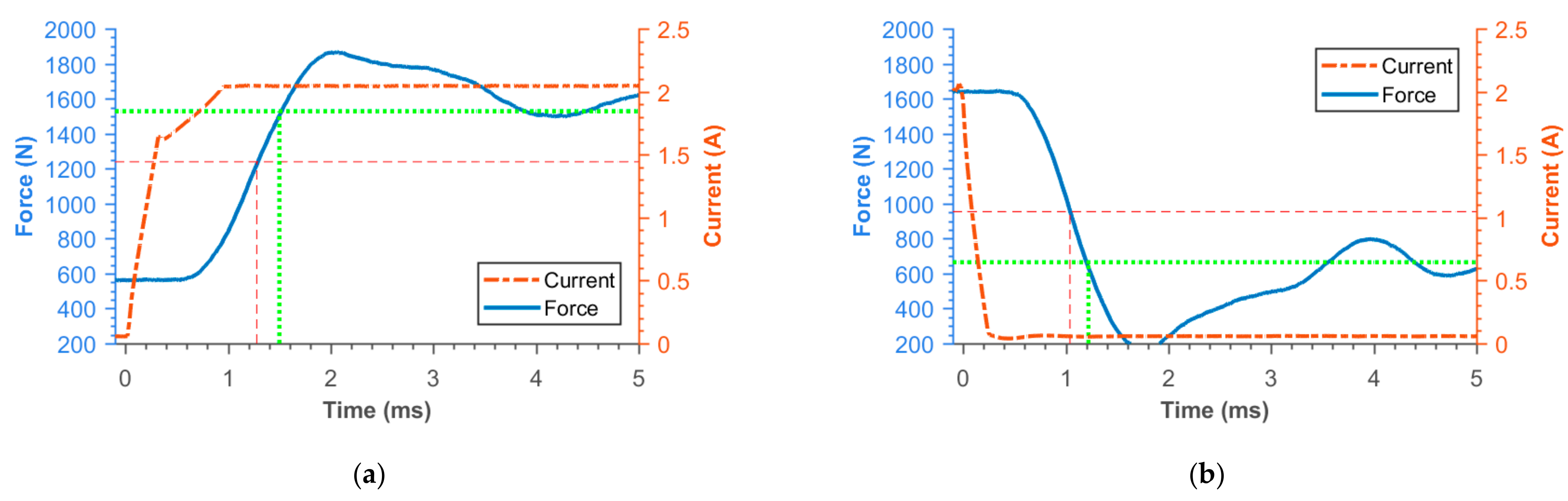
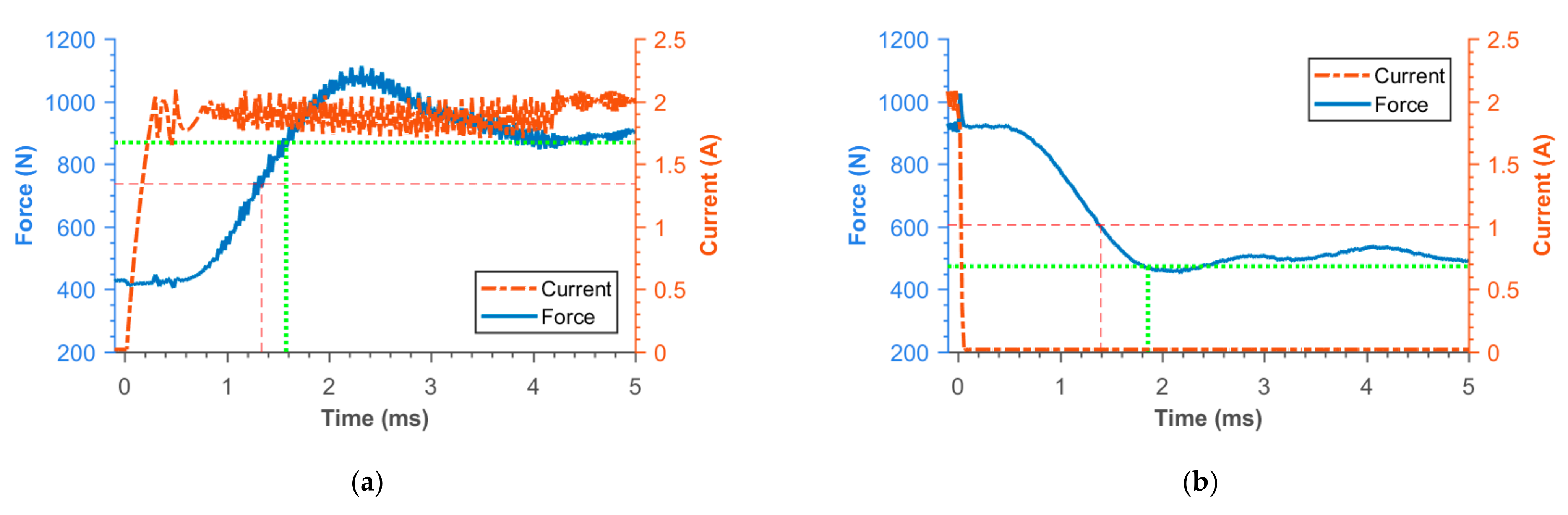
3.2. Transient Responses of MR Damper Force
- The response times of MR valves made of solid parts corresponds with their electrical resistivity.
- Grooves rapidly speed up the response time of MR valves made of metals.
- The force response course is similar to first-order dynamic systems only for pistons made of solid steel. In this case, the secondary response time is approximately 3 times longer than the primary response time.
- The secondary response time for pistons made of materials with high electrical resistivity is much shorter. The response of the force is copying the course of electric current with some delay. Approximation by a first-order dynamic system is therefore not very suitable.
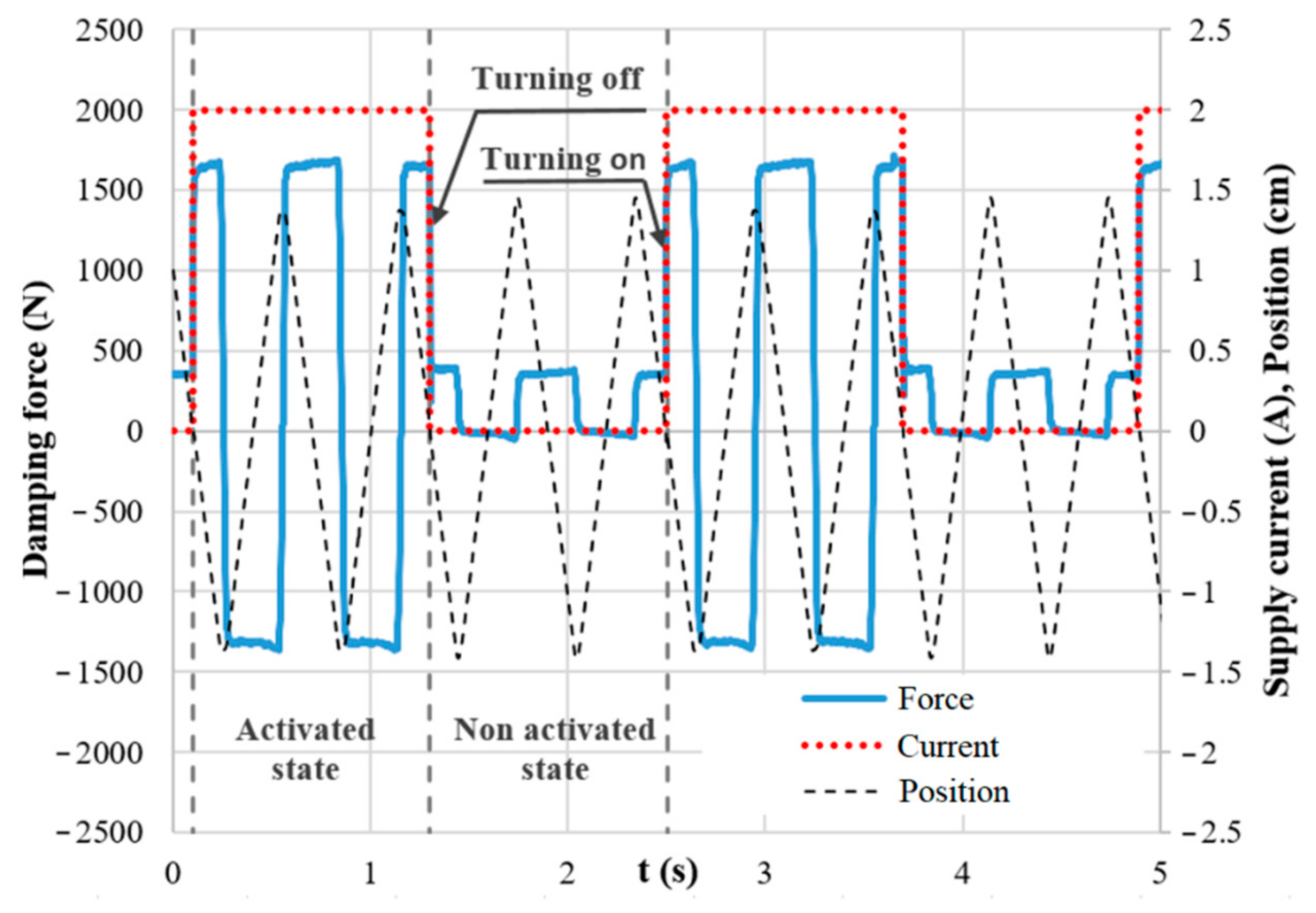
- The simulations for grooved pistons or pistons made of materials with high electrical resistivity predicted significantly shorter response time of the magnetic field (basically the same as the response time of the current). The difference between the measured and simulated values can be explained by the response time of the MR fluid itself. There is always a time delay of approximately 0.6 ms between the beginning of the electric current rise (or drop) and the force rise (or drop). This phenomenon is practically not dependent on piston material, or velocity.
- The best dynamic range can be achieved with the piston made of Hiperco/Vacoflux.
- The course of force in the case of pistons with a force secondary response time up to 3 ms exhibits quite heavy oscillations. This is probably caused by the compliance of MR fluid and other parts of the MR damper. This problem was explained in [57].
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rabinow, J. The Magnetic Fluid Clutch. Trans. Am. Inst. Electr. Eng. 1948, 67, 1308–1315. [Google Scholar] [CrossRef]
- Klingenberg, D.J. Magnetorheology: Applications and challenges. Am. Inst. Chem. Eng. 2001, 47, 246–249. [Google Scholar] [CrossRef]
- Bossis, G.; Lacis, S.; Meunier, A.; Volkova, O. Magnetorheological fluids. J. Magn. Magn. Mater. 2002, 252, 224–228. [Google Scholar] [CrossRef]
- Simon, T.M.; Reitich, F.; Jolly, M.R.; Ito, K.; Banks, H.T. The effective magnetic properties of magnetorheological fluids. Math. Comput. Model. 2001, 33, 273–284. [Google Scholar] [CrossRef]
- Carlson, J.D.; Jolly, M.R. MR fluid, foam and elastomer devices. Mechatronics 2000, 10, 555–569. [Google Scholar] [CrossRef]
- De Vicente, J.; Klingenberg, D.J.; Hidalgo-Alvarez, R. Magnetorheological fluids: A review. Soft Matter 2011, 7, 3701. [Google Scholar] [CrossRef]
- Plachy, T.; Cvek, M.; Kozakova, Z.; Sedlacik, M.; Moucka, R. The enhanced MR performance of dimorphic MR suspensions containing either magnetic rods or their non-magnetic analogs. Smart Mater. Struct. 2017, 26, 025026. [Google Scholar] [CrossRef]
- Karnopp, D. Active Damping in Road Vehicle Suspension Systems. Veh. Syst. Dyn. 1983, 12, 291–311. [Google Scholar] [CrossRef]
- Crews, J.H.; Mattson, M.G.; Buckner, G.D. Multi-objective control optimization for semi-active vehicle suspensions. J. Sound Vib. 2011, 330, 5502–5516. [Google Scholar] [CrossRef]
- Song, X.; Ahmadian, M.; Southward, S.; Miller, L.R. An Adaptive Semiactive Control Algorithm for Magnetorheological Suspension Systems. J. Vib. Acoust. 2005, 127, 493. [Google Scholar] [CrossRef]
- Seong, M.S.; Choi, S.B.; Sung, K.G. Control Strategies for Vehicle Suspension System Featuring Magnetorheological (MR) Damper. In Vibration Analysis and Control: New Trends and Developments; InTech: London, UK, 2011; pp. 97–114. [Google Scholar]
- Goldasz, J. Study of a modular magnetorheological valve 2017. In Proceedings of the 18th International Carpathian Control Conference (ICCC), Sinaia, Romania, 28–31 May 2017; Volume 63, pp. 306–309. [Google Scholar]
- Gołdasz, J.; Dzierżek, S. Parametric study on the performance of automotive MR shock absorbers. IOP Conf. Ser. Mater. Sci. Eng. 2016, 148, 012004. [Google Scholar] [CrossRef]
- Carlson, J.D.; Catanzarite, D.M.; St. Clair, K.A. Commercial magneto-rheological fluid devices. Int. J. Mod. Phys. B 1996, 10, 2857–2865. [Google Scholar] [CrossRef]
- Wu, X.; Griffin, M.J. A semi-active control policy to reduce the occurrence and severity of end-stop impacts in a suspension seat with an electrorheological fluid damper. J. Sound Vib. 1997, 203, 781–793. [Google Scholar] [CrossRef]
- Choi, S.B.; Nam, M.H.; Lee, B.K. Vibration Control of a MR Seat Damper for Commercial Vehicles. J. Intell. Mater. Syst. Struct. 2000, 11, 936–944. [Google Scholar] [CrossRef]
- McManus, S.J.; St. Clair, K.A.; Boileau, P.É.; Boutin, J.; Rakheja, S. Evaluation of vibration and shock attenuation performance of a suspension seat with a semi-active magnetorheological fluid damper. J. Sound Vib. 2002, 253, 313–327. [Google Scholar] [CrossRef]
- Choi, Y.T.; Wereley, N.M. Mitigation of biodynamic response to vibratory and blast-induced shock loads using magnetorheological seat suspensions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2005, 219, 741–753. [Google Scholar] [CrossRef]
- Dyke, S.J.; Spencer, B.F.; Sain, M.K.; Carlson, J.D. An experimental study of MR dampers for seismic protection. Smart Mater. Struct. 1998, 7, 693–703. [Google Scholar] [CrossRef]
- Li, H.; Wang, J. Experimental investigation of the seismic control of a nonlinear soil-structure system using MR dampers. Smart Mater. Struct. 2011, 20, 085026. [Google Scholar] [CrossRef]
- Dyke, S.J.; Spencer, B.F.; Sain, M.K.; Carlson, J.D. Modeling and control of magnetorheological dampers for seismic response reduction. Smart Mater. Struct. 1999, 5, 565–575. [Google Scholar] [CrossRef]
- Yang, G.; Spencer, B.F.; Carlson, J.D.; Sain, M.K. Large-scale MR fluid dampers: Modeling and dynamic performance considerations. Eng. Struct. 2002, 24, 309–323. [Google Scholar] [CrossRef]
- Ok, S.Y.; Kim, D.S.; Park, K.S.; Koh, H.M. Semi-active fuzzy control of cable-stayed bridges using magneto-rheological dampers. Eng. Struct. 2007, 29, 776–788. [Google Scholar] [CrossRef]
- Kim, I.H.; Jung, H.J.; Koo, J.H. Experimental evaluation of a self-powered smart damping system in reducing vibrations of a full-scale stay cable. IOP Sci. Smart Mater. Struct. 2010, 19, 115027. [Google Scholar] [CrossRef]
- BenLahcene, Z.; Faris, W.F.; Khan, M.R. Analysis of Semi-Active and Passive Suspensions System for Off-Road Vehicles. In Proceedings of the Conference on Intelligent Systems and Automation: 2nd Mediterranean Conference (CISA 2009), Zarzis, Tunisia, 23–25 March 2009; pp. 318–323. [Google Scholar]
- Rae-Kwan, K.; Keum-Shik, H. Skyhook control using a full-vehicle model and four relative displacement sensors. In Proceedings of the International Conference on Control, Automation and Systems 2007, Seoul, Korea, 17–20 October 2007; pp. 268–272. [Google Scholar]
- Rao, T.R.M.; Rao, G.V.; Rao, K.S.; Purushottam, A. Analysis of passive and semiactive controlled suspension for ride comfort in an omnibus passing over a speed bump. Int. J. Res. Rev. Appl. Sci. 2010, 5, 7–14. [Google Scholar]
- Choi, S.B.; Seong, M.S.; Ha, S.H. Vibration control of an MR vehicle suspension system considering both hysteretic behavior and parameter variation. Smart Mater. Struct. 2009, 18, 125010. [Google Scholar] [CrossRef]
- Yang, B.; Luo, J.; Dong, L. Magnetic circuit FEM analysis and optimum design for MR damper. Int. J. Appl. Electromagn. Mech. 2010, 33, 207–216. [Google Scholar] [CrossRef]
- Zhu, X.; Lai, C. Design and performance analysis of a magnetorheological fluid damper for drillstring. Int. J. Appl. Electromagn. Mech. 2012, 40, 67–83. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Choi, S.B. Optimal design of MR shock absorber and application to vehicle suspension. Smart Mater. Struct. 2009, 18, 035012. [Google Scholar] [CrossRef]
- Lee, H.; Nam, Y.; Park, M. Electromagnetic design for performance improvement of an MR valve. Int. J. Appl. Electromagn. Mech. 2012, 39, 575–581. [Google Scholar] [CrossRef]
- Strecker, Z.; Mazůrek, I.; Roupec, J.; Klapka, M. Influence of MR damper response time on semiactive suspension control efficiency. Meccanica 2015, 50, 1949–1959. [Google Scholar] [CrossRef]
- Cha, Y.J.; Agrawal, A.K.; Dyke, S.J. Time delay effects on large-scale MR damper based semi-active control strategies. Smart Mater. Struct. 2013, 22, 015011. [Google Scholar] [CrossRef]
- Koo, J.H.; Goncalves, F.D.; Ahmadian, M. A comprehensive analysis of the response time of MR dampers. Smart Mater. Struct. 2006, 15, 351–358. [Google Scholar] [CrossRef]
- Strecker, Z.; Roupec, J.; Mazůrek, I. Limiting factors of the response time of the magnetorheological damper. Int. J. Appl. Electromagn. Mech. 2014, 47, 541–550. [Google Scholar] [CrossRef]
- Strecker, Z.; Roupec, J.; Mazurek, I.; Machacek, O.; Kubik, M.; Klapka, M. Design of magnetorheological damper with short time response. J. Intell. Mater. Syst. Struct. 2015, 26, 1951–1958. [Google Scholar] [CrossRef]
- Goncalves, F.D.; Ahmadian, M.; Carlson, J.D. Investigating the magnetorheological effect at high flow velocities. Smart Mater. Struct. 2005, 15, 75–85. [Google Scholar] [CrossRef]
- Jolly, M.R.; Bender, J.W.; Mathers, R.T. Indirect Measurements of Microstructure Development in Magnetorheological Fluids. Int. J. Mod. Phys. B 1999, 13, 2036–2043. [Google Scholar] [CrossRef]
- Jiang, Z.; Christenson, R.E. A fully dynamic magneto-rheological fluid damper model. Smart Mater. Struct. 2012, 21, 065002. [Google Scholar] [CrossRef]
- Feeley, J.J. A simple dynamic model for eddy currents in a magnetic actuator. IEEE Trans. Magn. 1996, 32, 453–458. [Google Scholar] [CrossRef]
- Maas, J.; Güth, D. Experimental investigation of the transient behaviour of MR fluids. In Proceedings of the ASME 2011 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Scottsdale, AZ, USA, 18–21 September 2011; pp. 229–238. [Google Scholar]
- EPCOS. Data Book 2013: Ferrites and Accessories. 2013, p. 625. Available online: www.tdk-electronics.tdk.com/download/519704/069c210d0363d7b4682d9ff22c2ba503/ferrites-and-accessories-db-130501.pdf (accessed on 1 March 2021).
- Heck, C. Magnetic Materials and their Applications; Butterworth: London, UK, 1974; p. 11. [Google Scholar]
- Bhalla, D.; Singh, D.; Singh, S.; Seth, D. Material Processing Technology for Soft Ferrites Manufacturing. Am. J. Mater. Sci. 2013, 2, 165–170. [Google Scholar] [CrossRef][Green Version]
- Shokrollahi, H. The magnetic and structural properties of the most important alloys of iron produced by mechanical alloying. Mater. Des. 2009, 30, 3374–3387. [Google Scholar] [CrossRef]
- Shokrollahi, H.; Janghorban, K. Soft magnetic composite materials (SMCs). J. Mater. Process. Technol. 2007, 189, 1–12. [Google Scholar] [CrossRef]
- Gołdasz, J. Electro-mechanical analysis of a magnetorheological damper with electrical steel laminations | Koncepcja tłoka amortyzatora samochodowego z cieczą magnetoreologiczną. Prz. Elektrotechniczny 2013, 89, 8–12. [Google Scholar]
- Kostamo, E.; Kostamo, J.; Kajaste, J.; Pietola, M. Magnetorheological valve in servo applications. J. Intell. Mater. Syst. Struct. 2012, 23, 1001–1010. [Google Scholar] [CrossRef]
- Omekanda, A.M.; Nehl, T.W.; Namuduri, C.S.; Gopalakrishnan, S. Electromagnetic Actuator Structure. U.S. Patent 10480674B2, 19 November 2015. [Google Scholar]
- Yoon, D.S.; Park, Y.J.; Choi, S.B. An eddy current effect on the response time of a magnetorheological damper: Analysis and experimental validation. Mech. Syst. Signal Process. 2019, 127, 136–158. [Google Scholar] [CrossRef]
- Strecker, Z.; Kubík, M.; Vítek, P.; Roupec, J.; Paloušek, D.; Šreibr, V. Structured magnetic circuit for magnetorheological damper made by selective laser melting technology. Smart Mater. Struct. 2019, 28, 5. [Google Scholar] [CrossRef]
- Kubík, M.; Macháček, O.; Strecker, Z.; Roupec, J.; Mazůrek, I. Design and testing of magnetorheological valve with fast force response time and great dynamic force range. Smart Mater. Struct. 2017, 26, 4. [Google Scholar] [CrossRef]
- Strecker, Z.; Roupec, J.; Mazůrek, I.; Macháček, O.; Kubík, M. Influence of response time of magnetorheological valve in Skyhook controlled three-parameter damping system. Adv. Mech. Eng. 2018, 10, 168781401881119. [Google Scholar] [CrossRef]
- Free B(H) & Core Loss Curves. Available online: magweb.us/free-bh-curves (accessed on 1 March 2021).
- Roupec, J.; Mazurek, I.; Strecker, Z.; Kubik, M.; Macháček, O. Tensile strength of pure iron samples manufactured by Selective Laser Melting Method. Eng. Mech. 2017, 830–833. [Google Scholar]
- Kubík, M.; Goldasz, J. Multiphysics Model of an MR Damper including Magnetic Hysteresis. Shock Vib. 2019, 2019, 3246915. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Material | Electrical Conductivity (MSm−1) | Electrical Resistivity (10−6 Ω∙m) | Eddy Currents | Relative Permeability |
|---|---|---|---|---|---|
| Piston rod | S235JRG | 6.3 | 0.16 | Yes | B-H curve |
| Washer | S235JRG | 6.3 | 0.16 | Yes | B-H curve |
| Coil | copper | 58.0 | 0.02 | No | 1 |
| Cup | bronze | 10.0 | 0.10 | Yes | 1 |
| Environment | vacuum | 0 | - | No | 1 |
| MRF | MRF-132DG | 0.01 | 100 | No | B-H curve |
| Size of Element (mm) | Piston Rod | Coil | Cup | Environment | MRF | Outer Cylinder | Core |
|---|---|---|---|---|---|---|---|
| Material approach | 0.9–1.8 | 1.6 | 1.4–1.8 | 2.2–2.7 | 0.8–1.1 | 0.9–1.3 | 1.5 |
| Shape approach | 0.9 | 1.2 | 1.3 | 1.0 | 0.7 | 0.9 | max 1.35 and 0.8 |
| Material | Ultimate Strength (MPa) | Electrical Resistivity (10−6 Ω∙m) | Magnetic Saturation (T) | Relative Permeability | Machinability | Price |
|---|---|---|---|---|---|---|
| Cutting steel 11SMn30 | 470 | 0.17 | 1.9 | 1200 | very bad | Low |
| N87 ferrite | 30 | 10,000,000 | 0.5 | 6400 | very bad | Medium |
| Sintex SMC prototyping | 75 | 2800 | 1.45 | 430 | good | High |
| Stainless steel AISI 420A | 760 | 0.60 | 1.6 | 950 | good | Low |
| SLM (pure iron) | 460 | 0.13 | 1.7 | 1900 | good | High |
| Vacoflux 50 | 350 | 0.42 | 2.35 | 3850 | good | High |
| Material | Measurement | Model | |||||
|---|---|---|---|---|---|---|---|
| Grooves No. in Core/Outer Cylinder (-) | Max. Magnetic Flux Density at 2 A (mT) | Remanence at 0 A (mT) | Response Time Signal Rise (ms) | Response Time Signal Drop (ms) | Response Time Signal Drop (ms) | Max. Magnetic Flux at 2 A (mT) | |
| 11SMn30 | 0 | 173 | 14 | 1.43 | 1.61 | 2.1 | 202 |
| 11SMn 30 | 48/48 | 187 | 15 | 0.35 | 0.35 | 0.52 | 200 |
| Hiperco/Vacoflux 50 | 0 | 208 | 8 | 1 | 0.92 | 0.68 | 223 |
| Hiperco/Vacoflux 50 | 3/0 | 207 | 8.2 | 0.72 | 0.69 | 0.40 | 223 |
| Hiperco/Vacoflux 50 | 6/0 | 206 | 6.6 | 0.67 | 0.61 | 0.32 | 223 |
| stainless steel AISI 420A | 0 | 180 | 33 | 0.93 | 0.68 | 0.67 | 211 |
| SLM (pure iron) | 0 | 230 | 16 | 2.21 | 2.41 | 3.62 | 215 |
| SLM (pure iron) | 48/48 | 221 | 16 | 0.49 | 0.45 | 0.35 | 217 |
| Ferrite N87 | 0 | 134 | 3 | 0.31 | 0.35 | 0.23 | 156 |
| Sintex SMC | 0 | 152 | 11 | 0.35 | 0.29 | 0.27 | 184 |
| Sintex (core) 11SMn30 (cylinder) | 0/48 | 190 | 14 | 0.64 | 0.61 | 0.57 | 197 |
| Type of Piston | Measurement | Model | ||||
|---|---|---|---|---|---|---|
| Primary Force Response Time τ63 (ms) | Secondary Force Response Time τ63 (ms) | Dynamic Force Range (-) | Primary Response Time of Magnetic Field (ms) | Secondary Response Time of Magnetic Field (ms) | Flux Density at 2 A (mT) | |
| Solid piston (11SMn30) | 10.3 | 32.7 | 5.73 | 7.6 | 21.9 | 505 |
| Groved piston (11SMn 30) | 1.74 | 2.86 | 5.05 | 0.61 | 3 | 481 |
| Hiperco/Vacoflux 50 piston | 3.57 | 14.14 | 6.4 | 4.45 | 13.5 | 689 |
| AISI 420A piston | 2.82 | 9.69 | 3.17 | 2.38 | 6.2 | 452 |
| SLM (pure iron) 48/48 | 2.03 | 6.78 | 5.25 | 0.78 | 4.3 | 516 |
| Ferrite N87 bobbin + 11SMn30 outer cylinder | 1.34 | 1.54 | 3.5 | 0.39 | 3.05 | 361 |
| SMC piston | 1.28 | 1.49 | 4.03 | 0.23 | 0.38 | 467 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Strecker, Z.; Jeniš, F.; Kubík, M.; Macháček, O.; Choi, S.-B. Novel Approaches to the Design of an Ultra-Fast Magnetorheological Valve for Semi-Active Control. Materials 2021, 14, 2500. https://doi.org/10.3390/ma14102500
Strecker Z, Jeniš F, Kubík M, Macháček O, Choi S-B. Novel Approaches to the Design of an Ultra-Fast Magnetorheological Valve for Semi-Active Control. Materials. 2021; 14(10):2500. https://doi.org/10.3390/ma14102500
Chicago/Turabian StyleStrecker, Zbyněk, Filip Jeniš, Michal Kubík, Ondřej Macháček, and Seung-Bok Choi. 2021. "Novel Approaches to the Design of an Ultra-Fast Magnetorheological Valve for Semi-Active Control" Materials 14, no. 10: 2500. https://doi.org/10.3390/ma14102500
APA StyleStrecker, Z., Jeniš, F., Kubík, M., Macháček, O., & Choi, S.-B. (2021). Novel Approaches to the Design of an Ultra-Fast Magnetorheological Valve for Semi-Active Control. Materials, 14(10), 2500. https://doi.org/10.3390/ma14102500