Data Merging of AE Sensors with Different Frequency Resolution for the Detection and Identification of Damage in Oxide-Based Ceramic Matrix Composites

 , and
, and
Abstract
1. Introduction
2. Experimental Procedure and Acoustic Emission Analysis
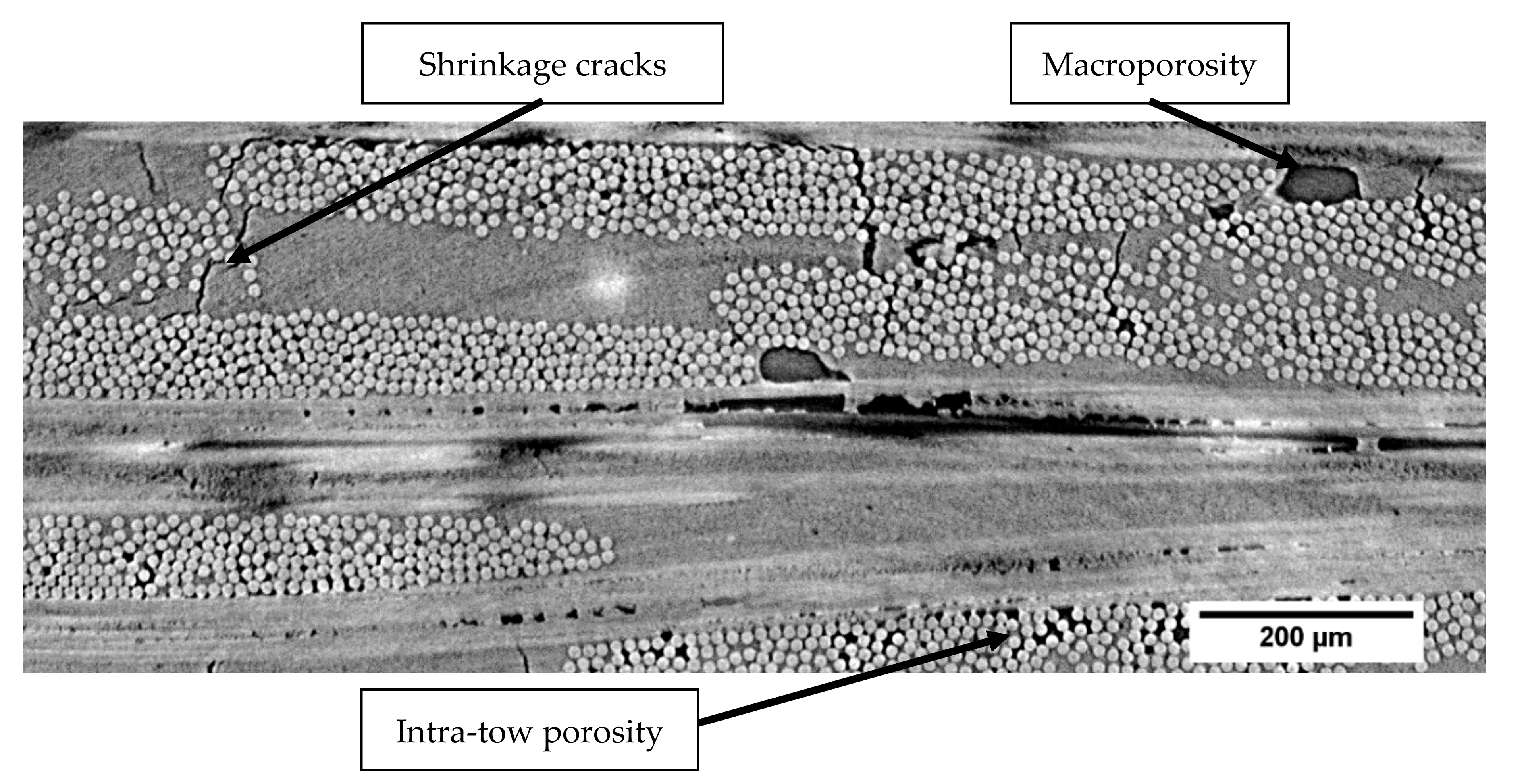
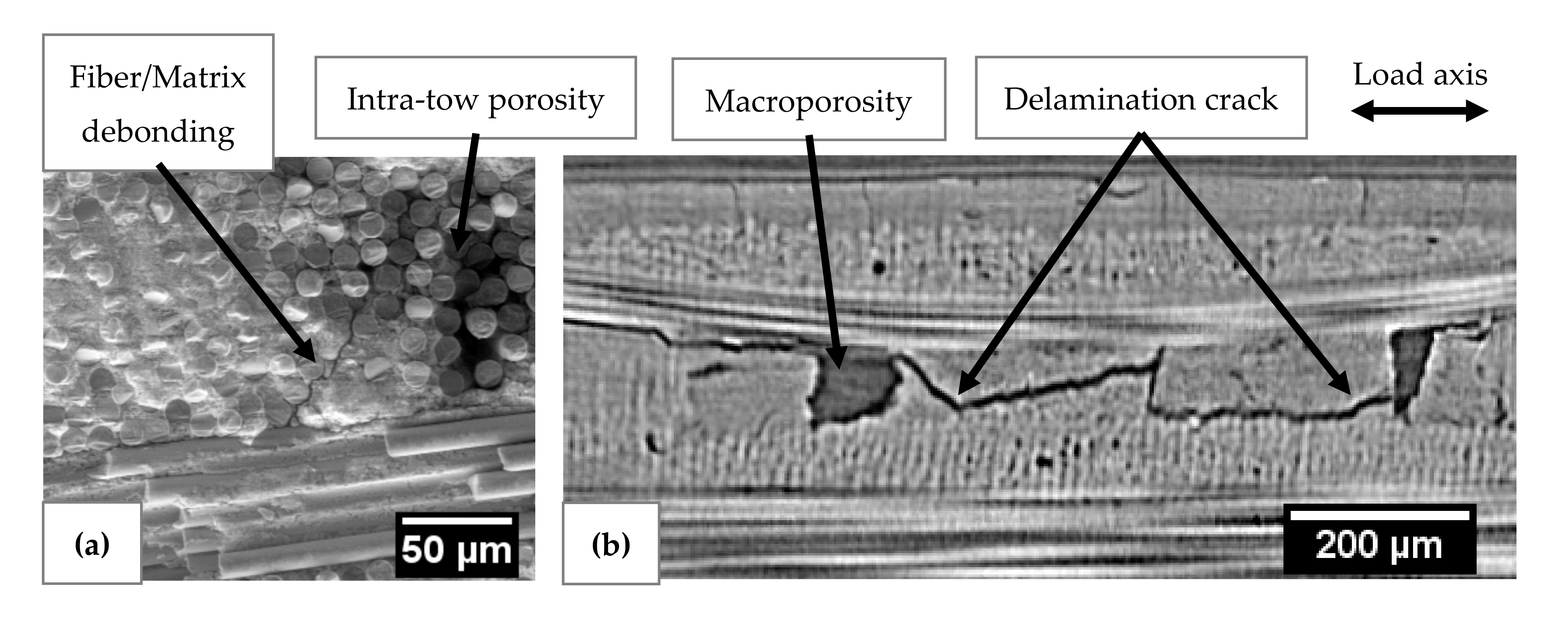
2.1. Description of the Material
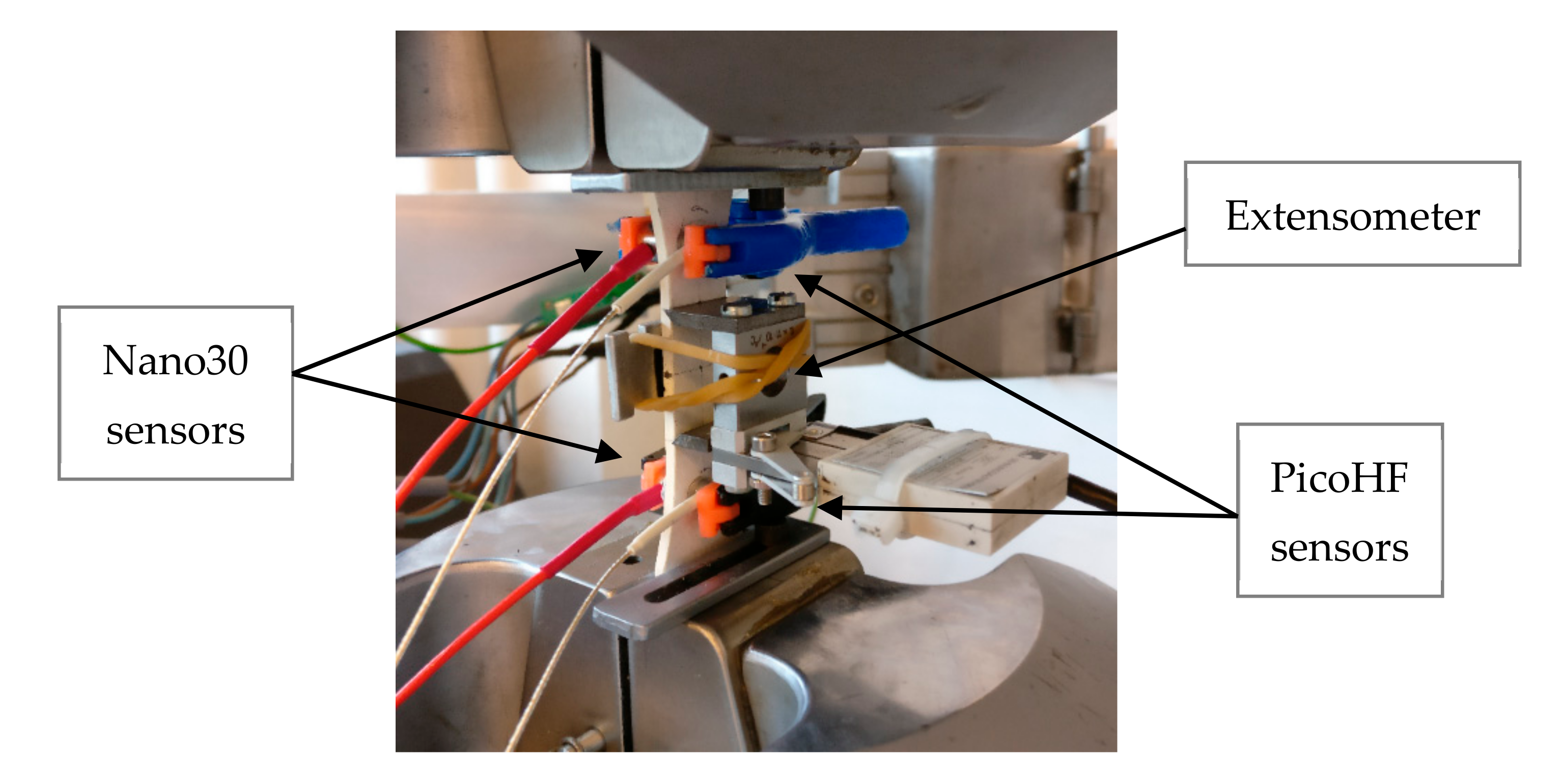
2.2. Tensile Test and Acoustic Emission Recording Procedure
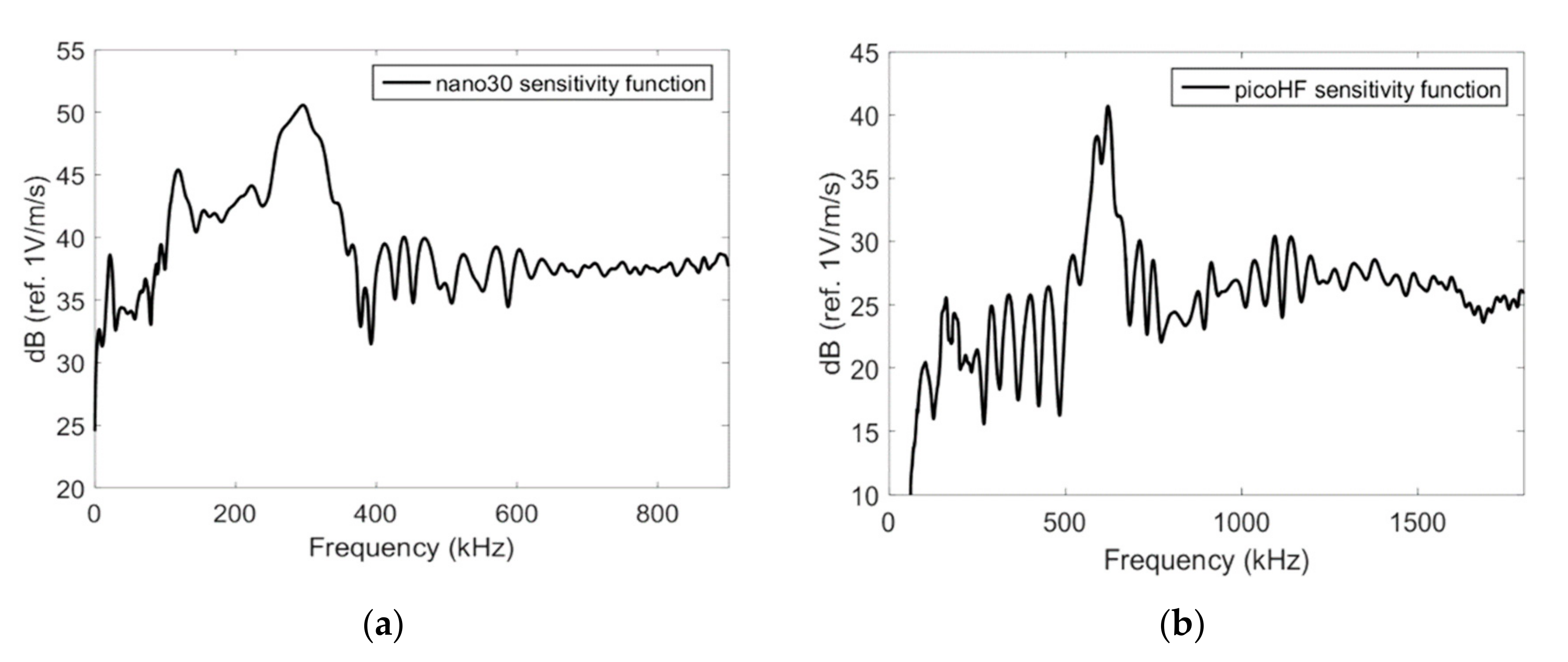
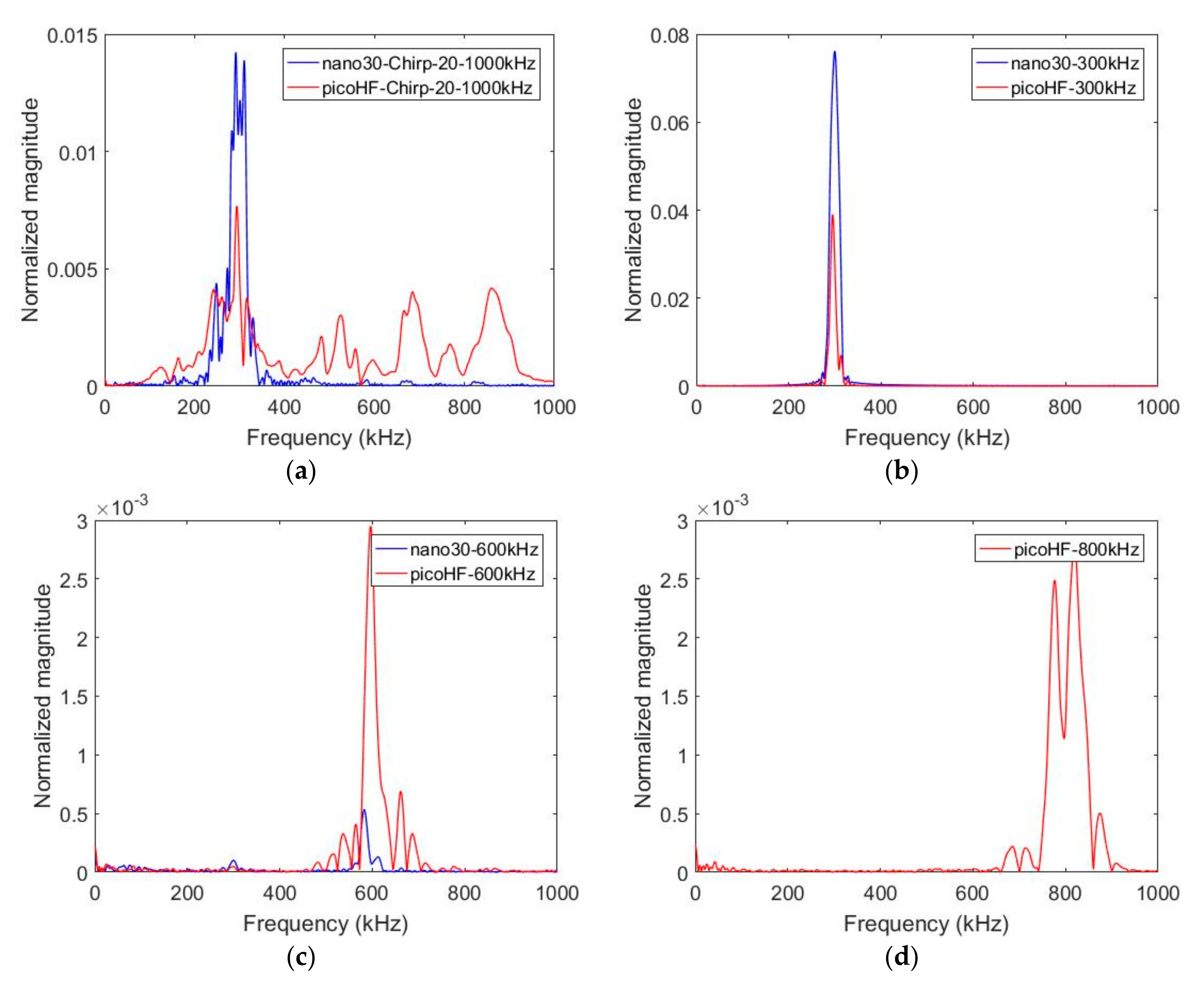
2.3. Characterization of the Sensor with an Acousto-Ultrasonic Card
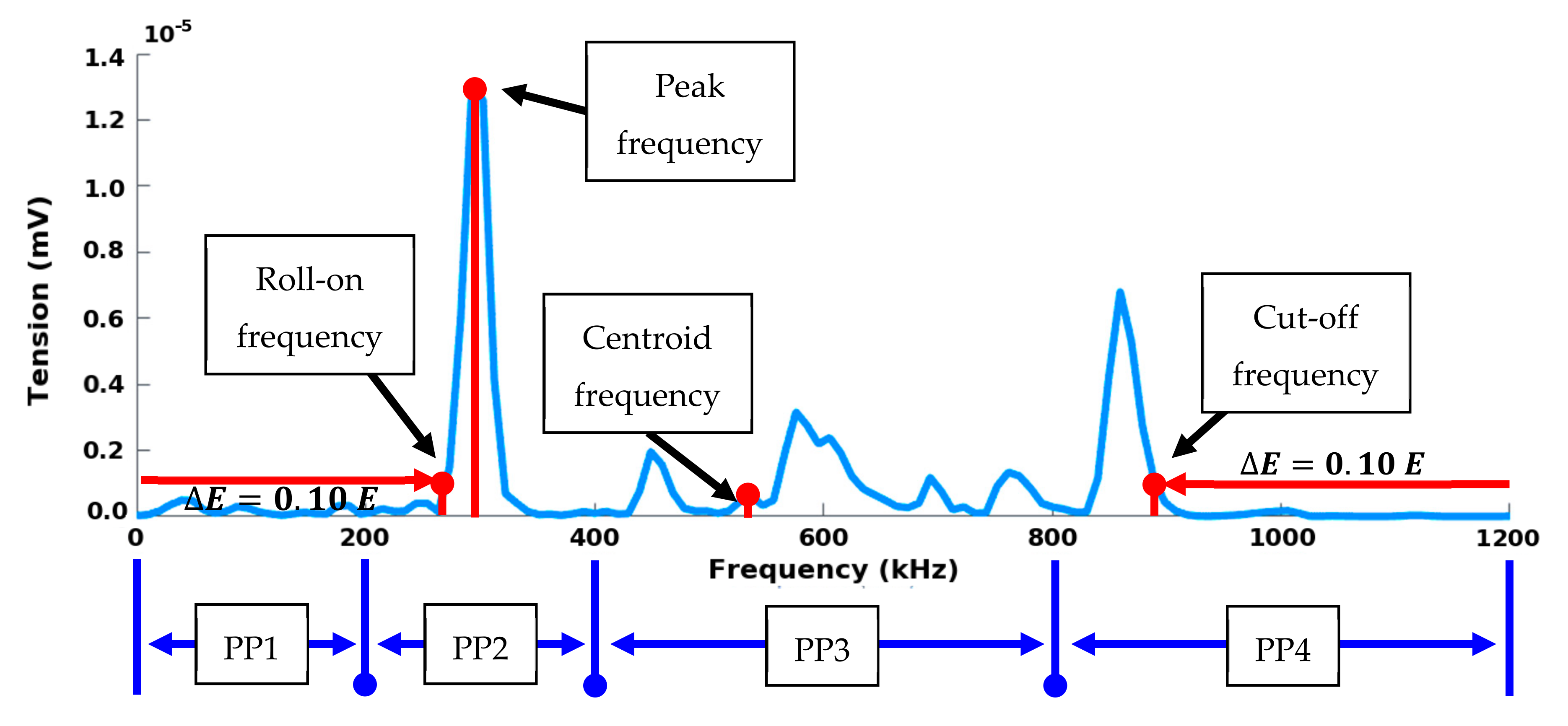
2.4. Pre-Processing of the Waveforms and Features Extraction
- -
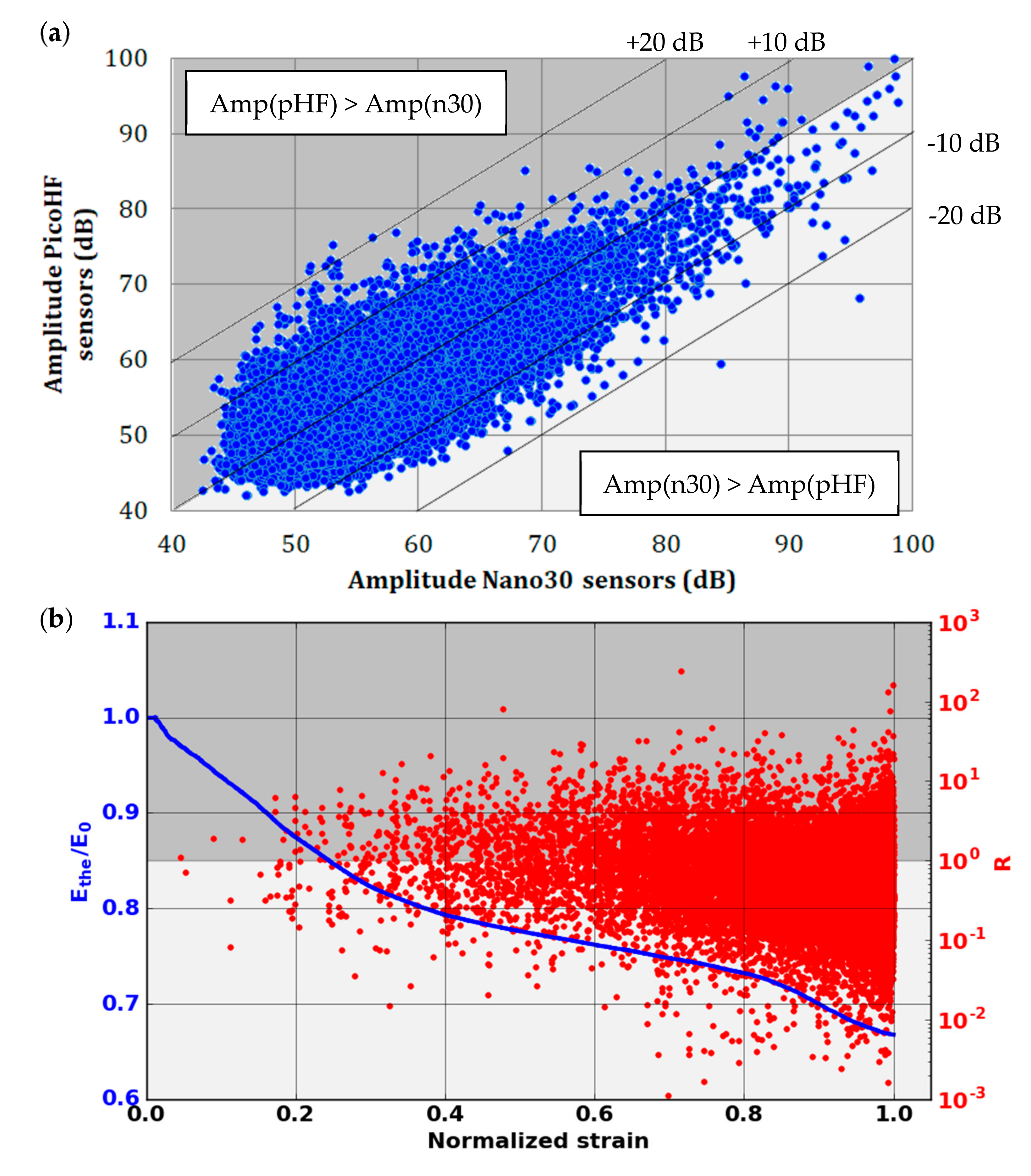
- if R is higher than 1, the content of the signal is mainly low-frequency, i.e., detected by Nano30 sensors,
- -
- if R is lower than 1, the content of the signal is mainly high-frequency, i.e., detected by PicoHF sensors.
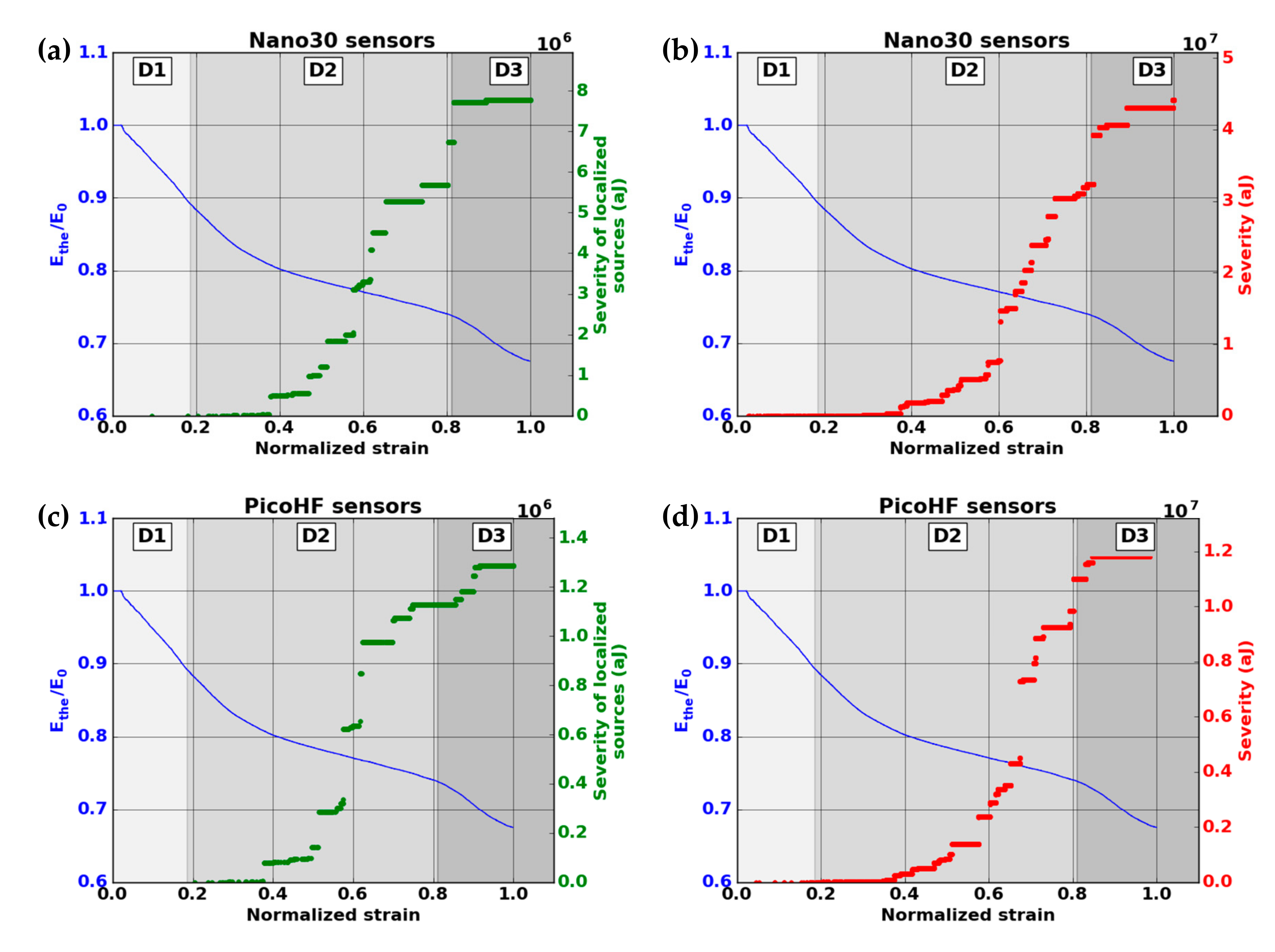
2.5. Damage Indicator
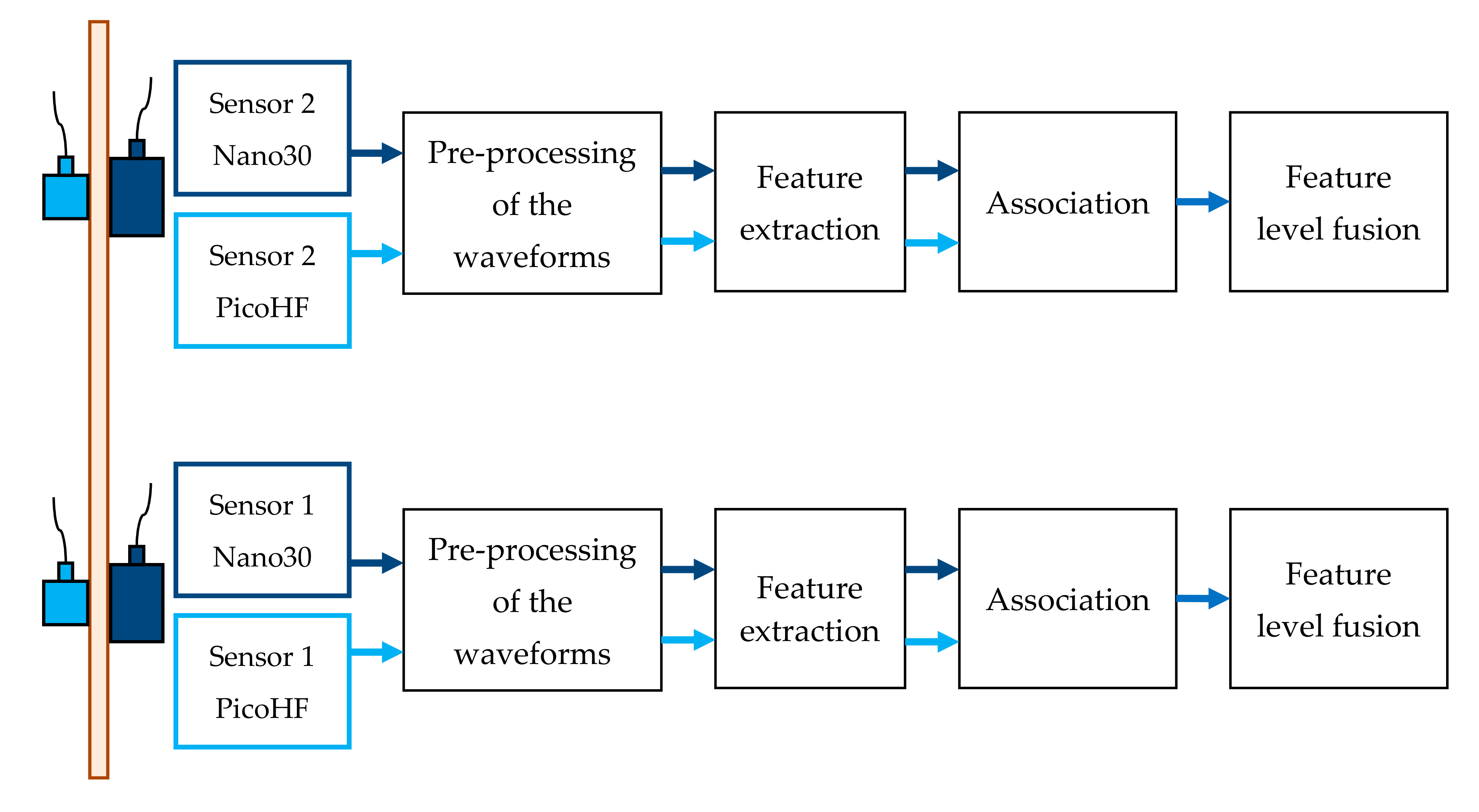
2.6. Signal Alignment and Feature Level Fusion
- -
- : descriptor i calculated from the two kinds of sensors,
- -
- : descriptor i calculated from the waveform recorded with Nano30 sensor,
- -
- : descriptor i calculated from the waveform recorded with PicoHF sensor.
2.7. Data Clustering: Unsupervised Approach
3. Results
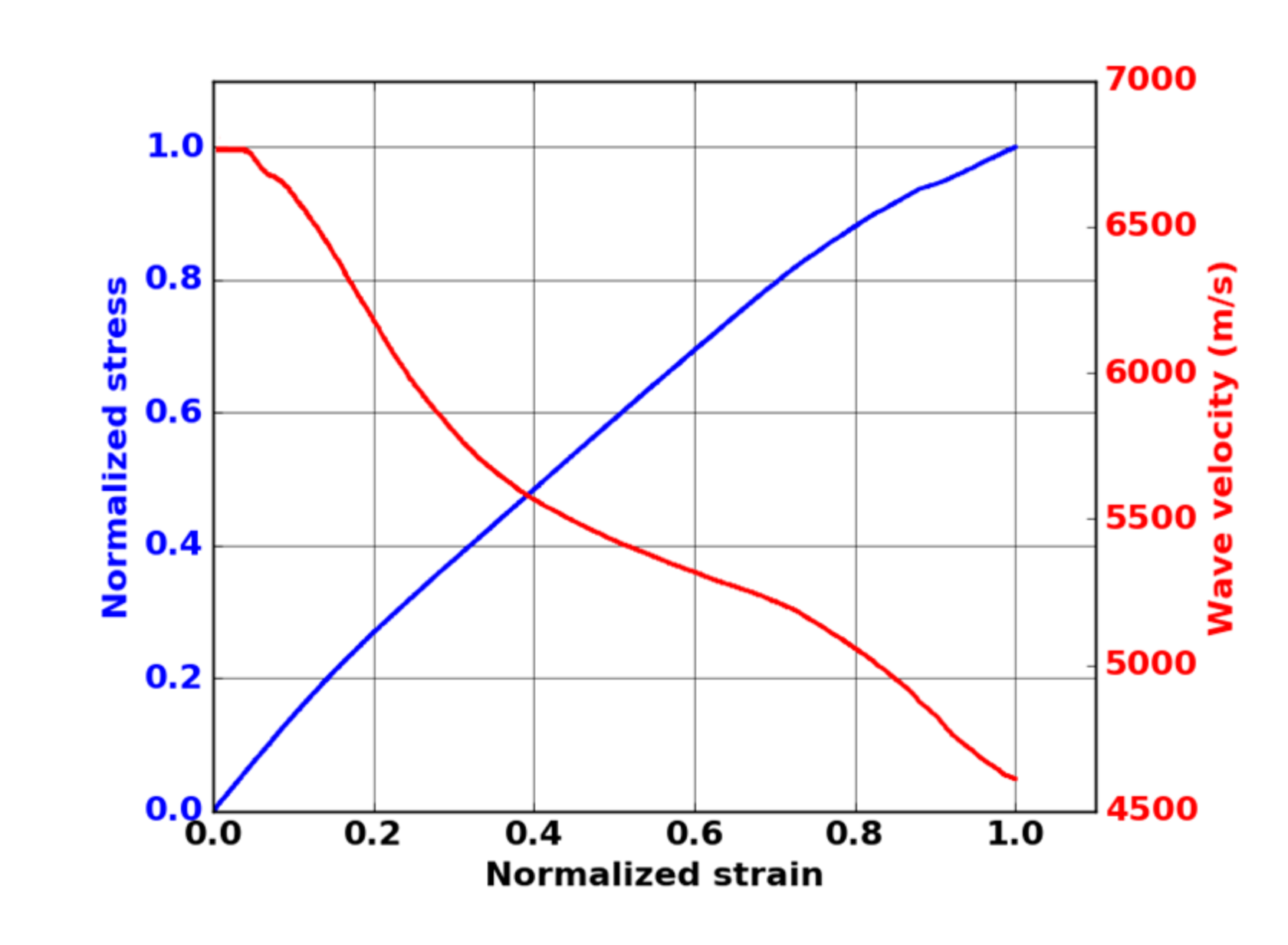
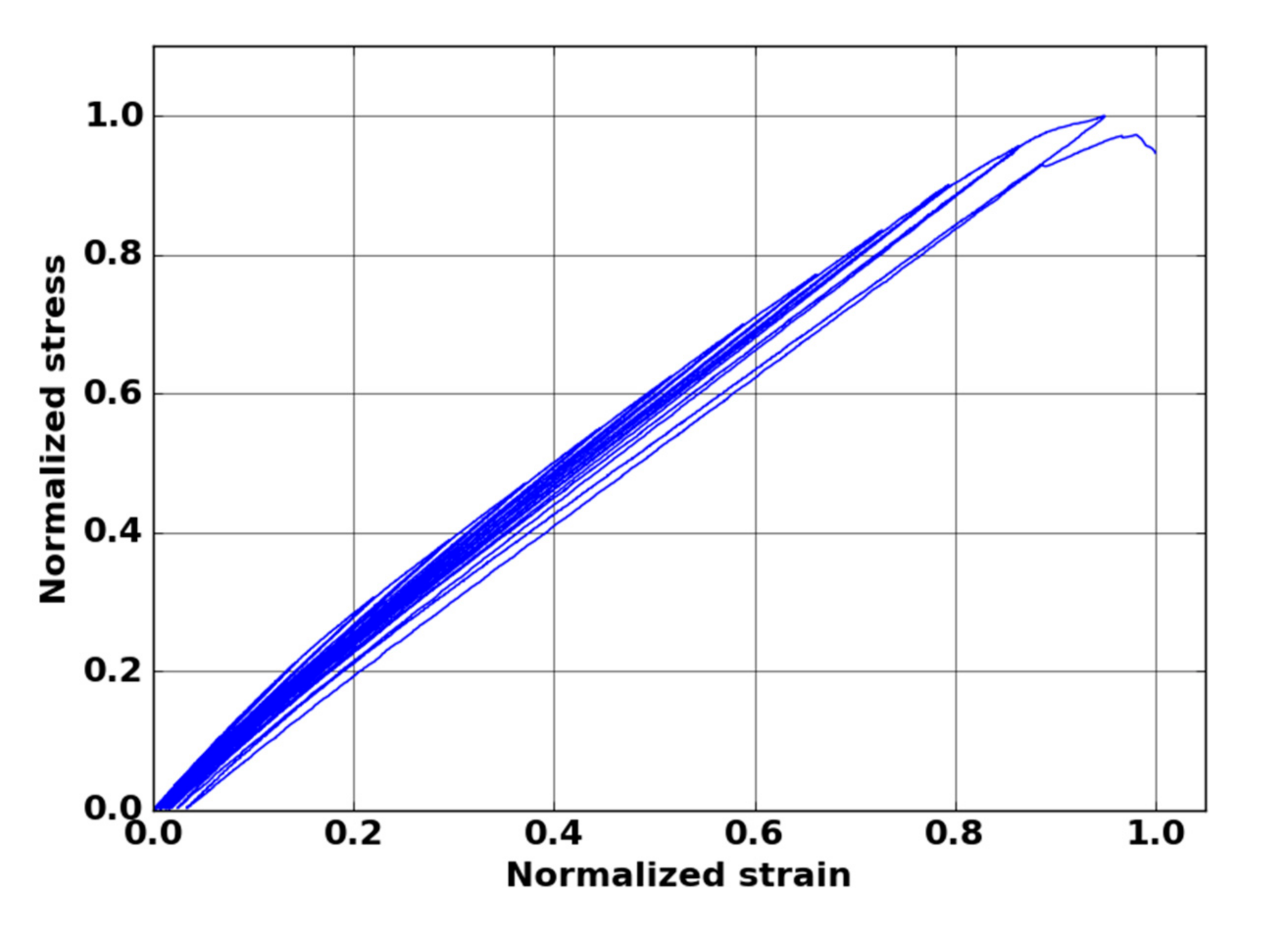
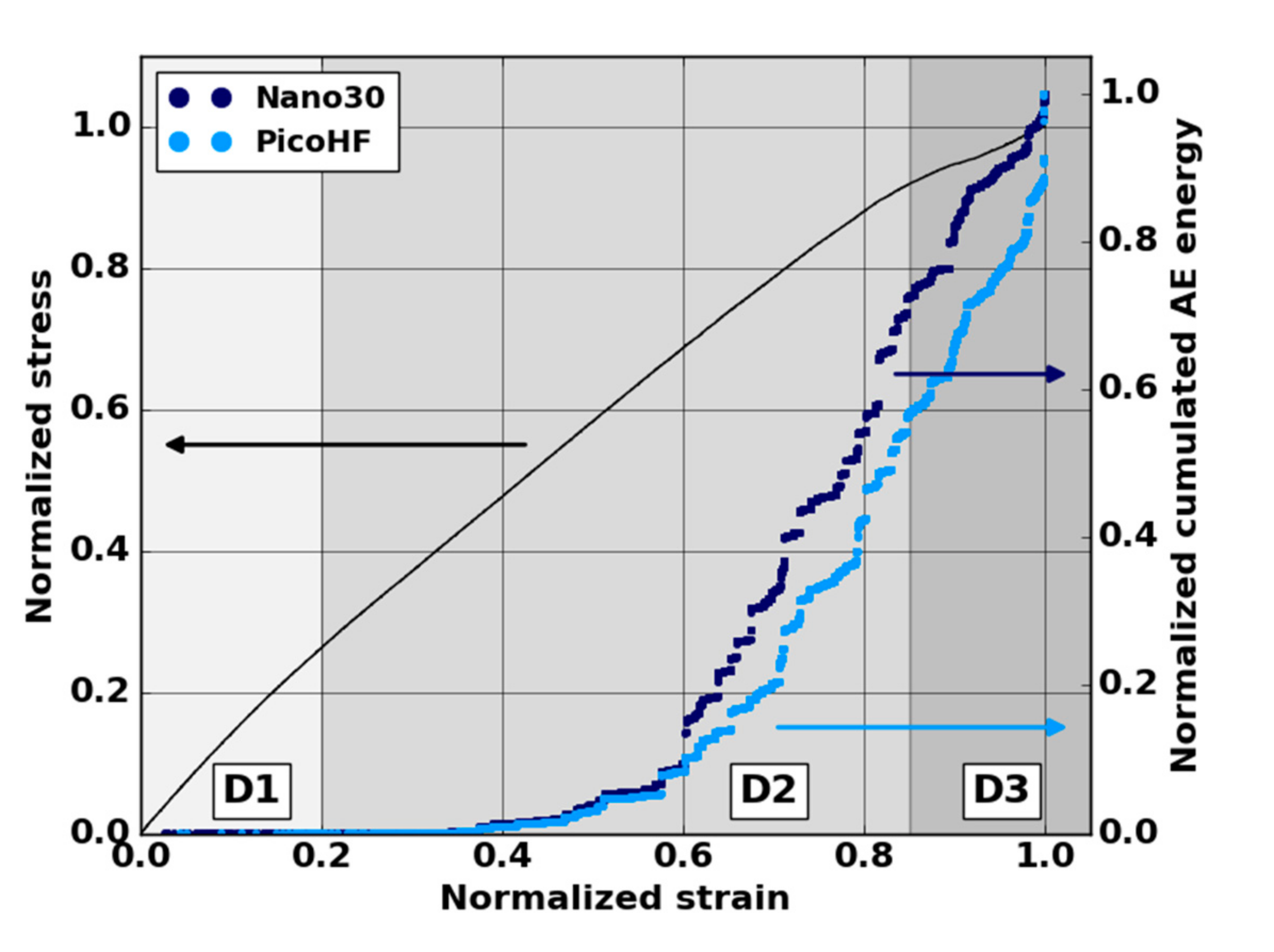
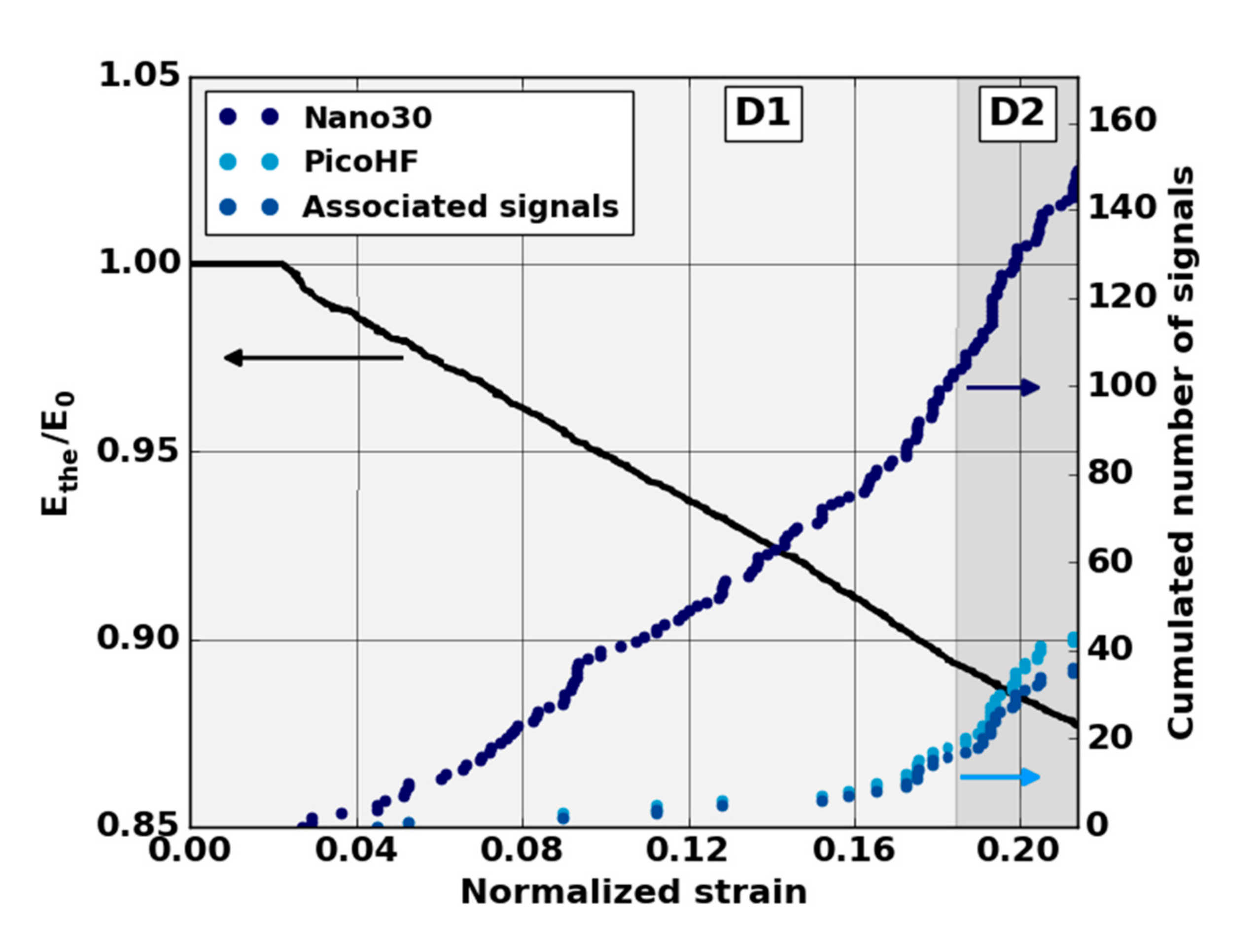
3.1. Global Mechanical Behavior and Ability to Detect Early Damage
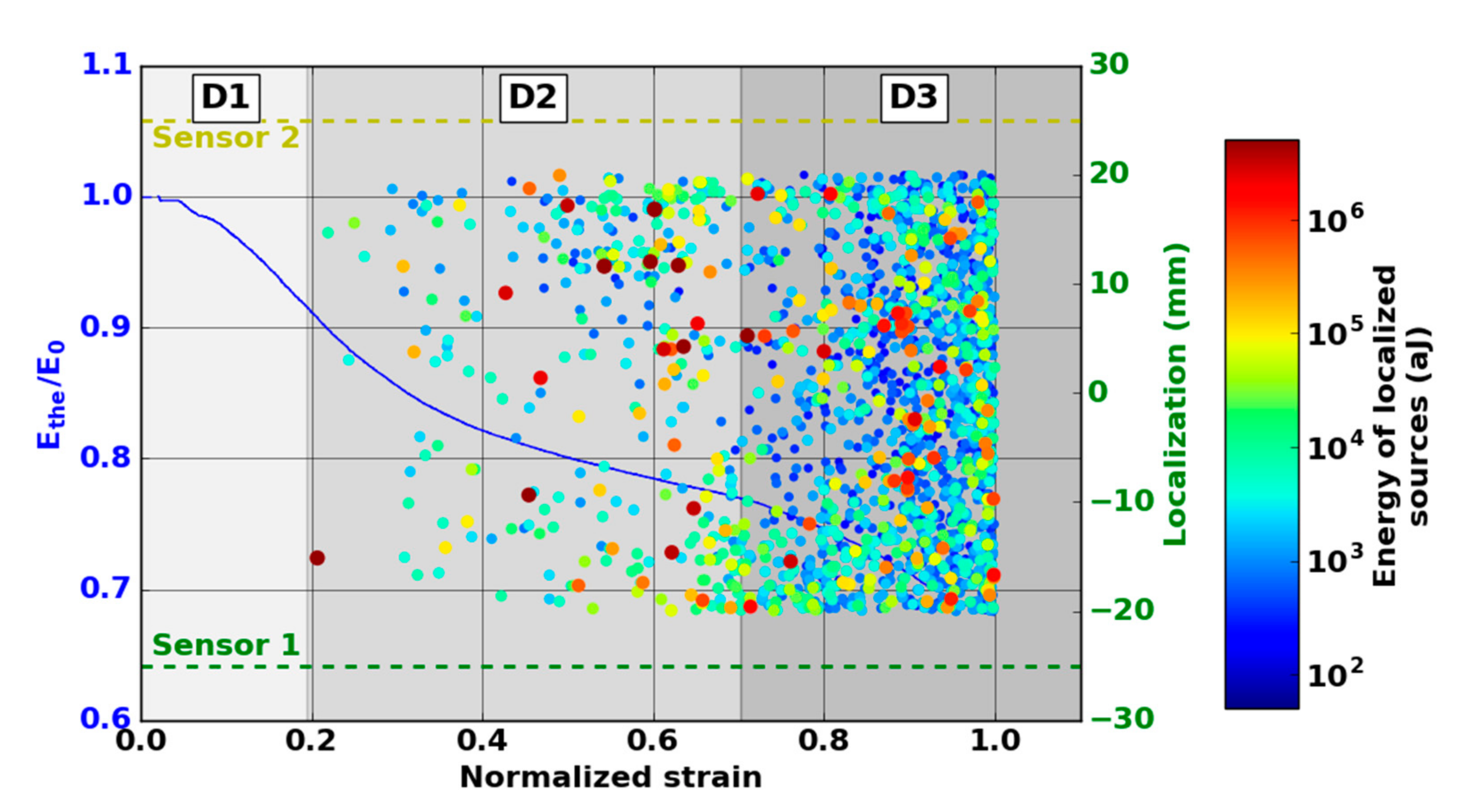
3.2. Damage Evolution
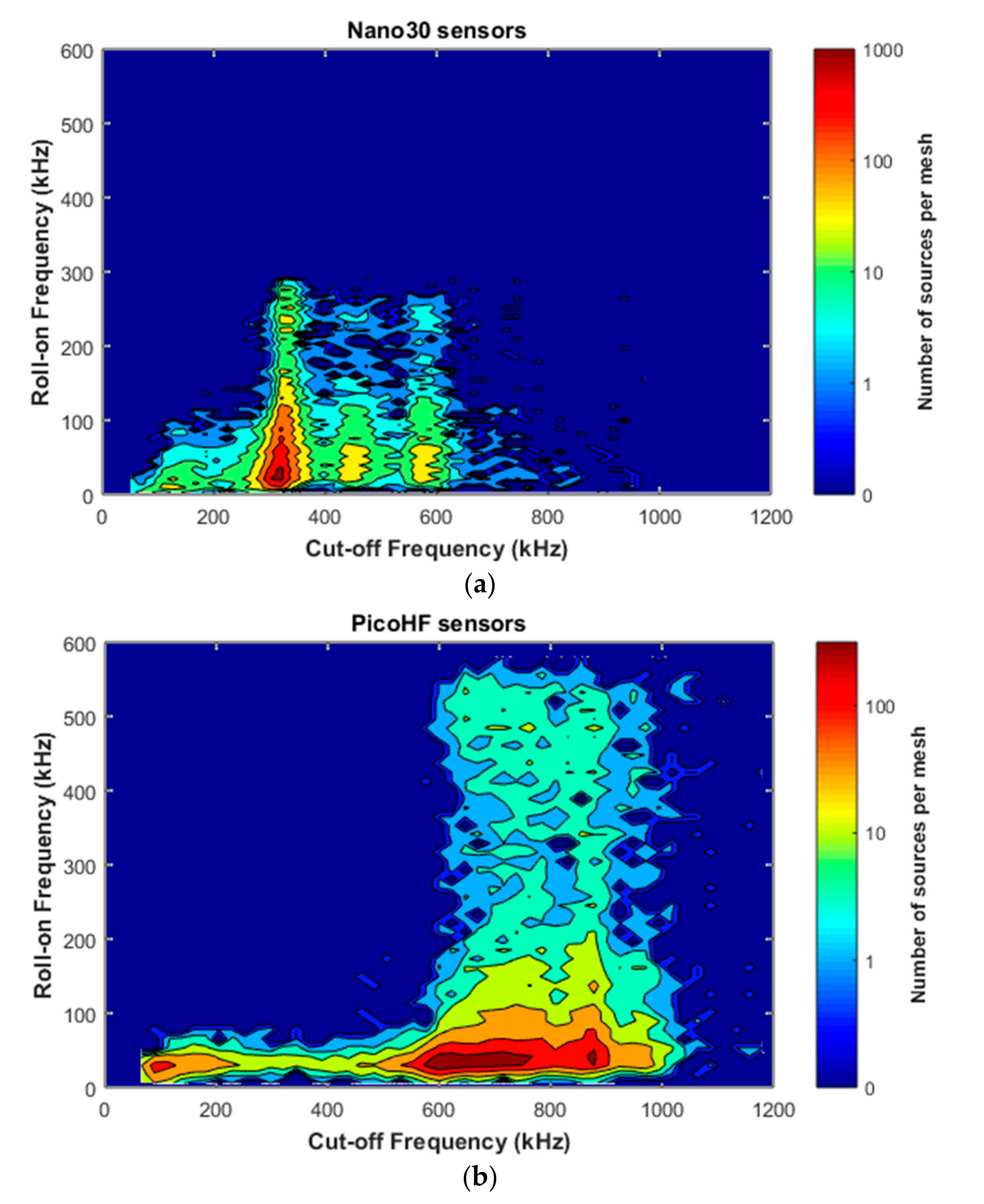
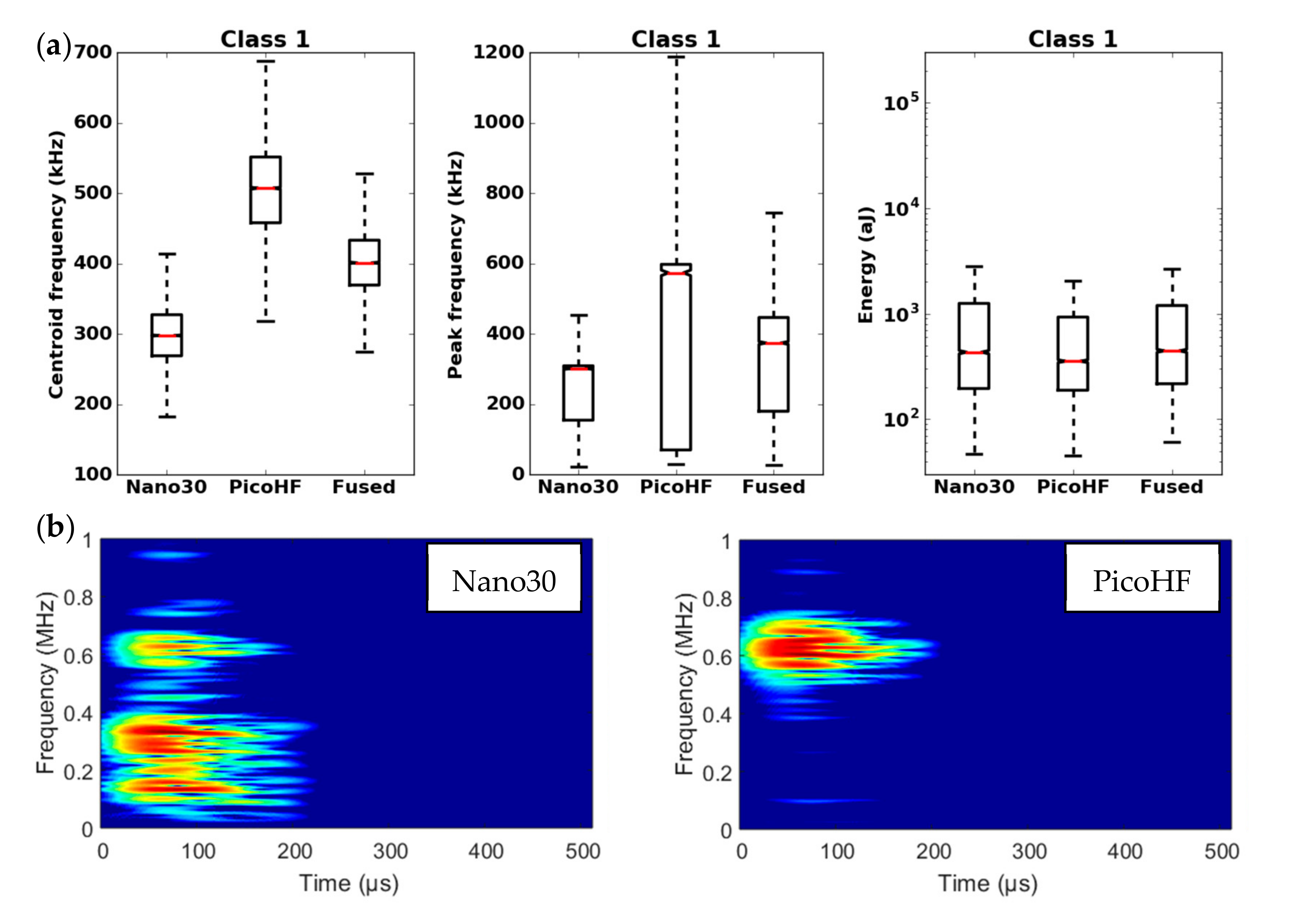
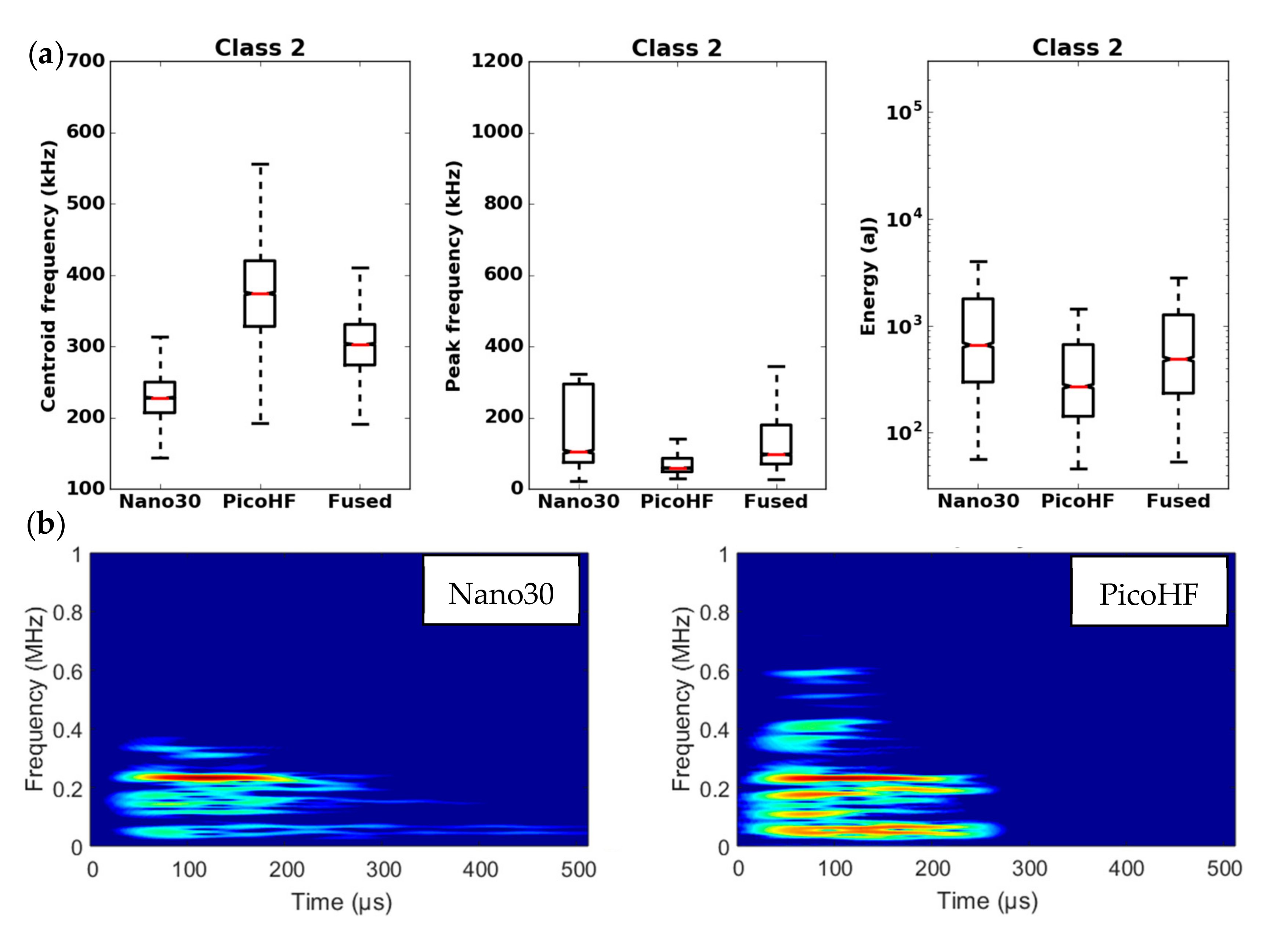
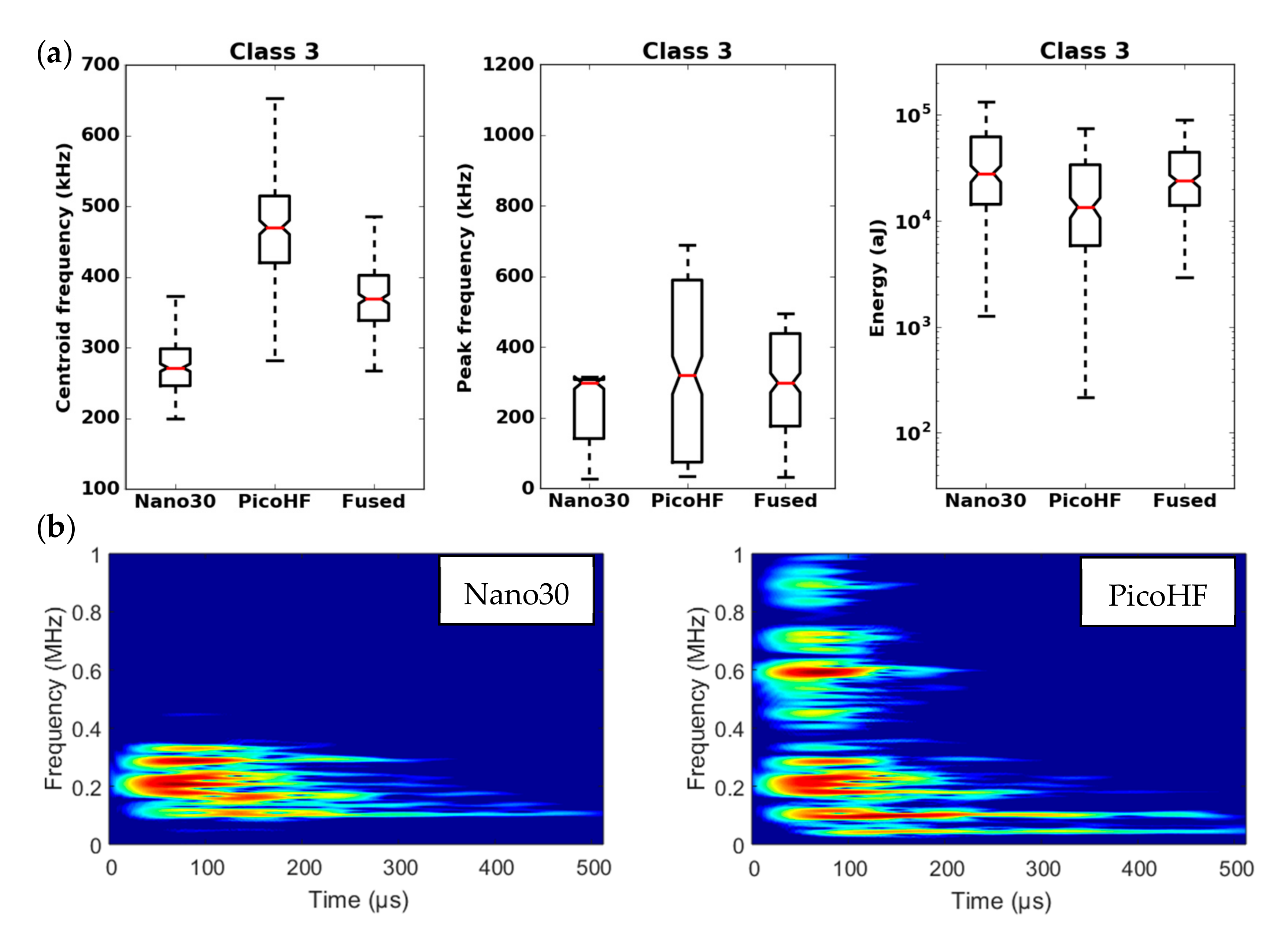
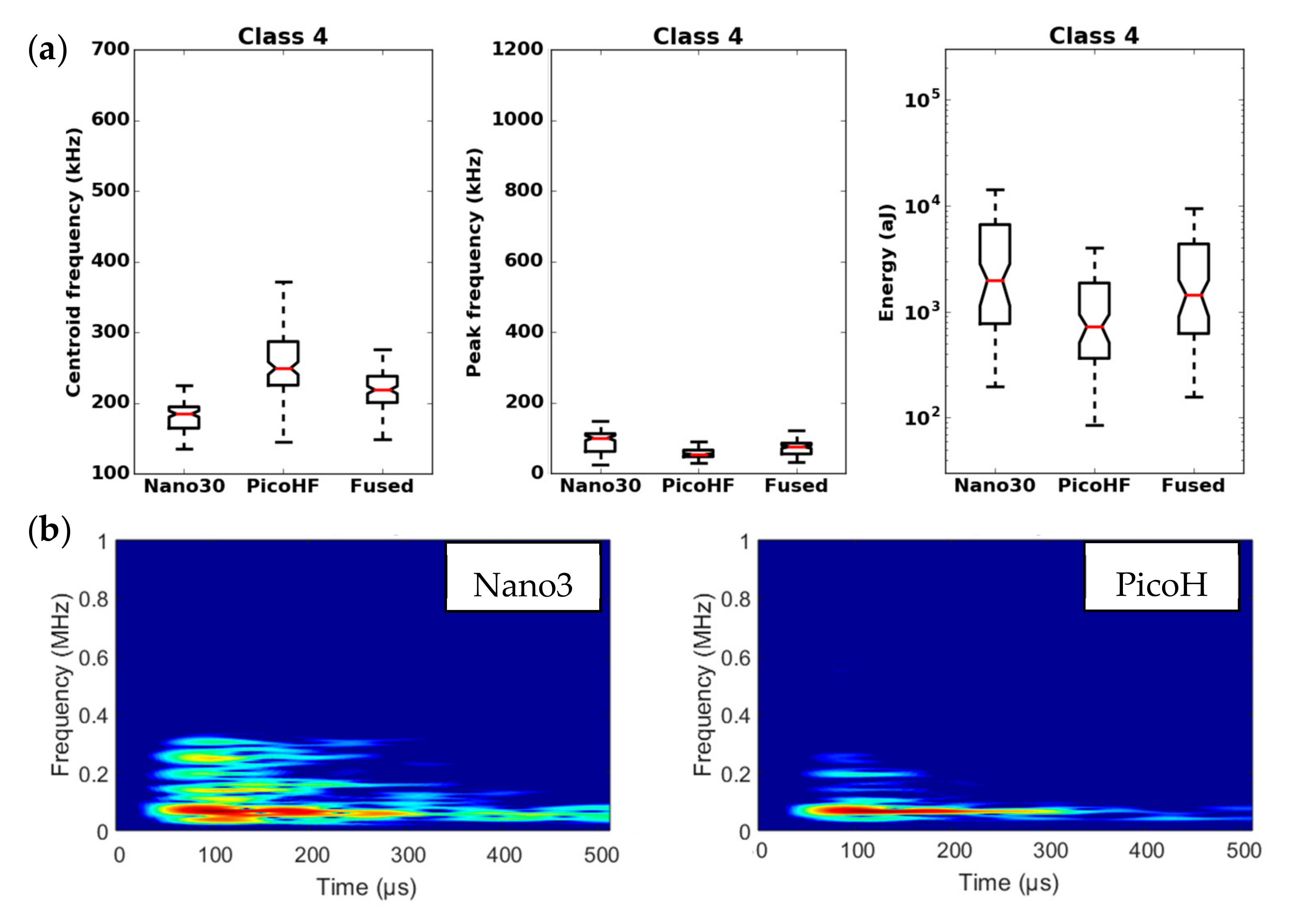
3.3. Waveforms Characteristics and the Combined Behavior of the Two Kinds of Sensors
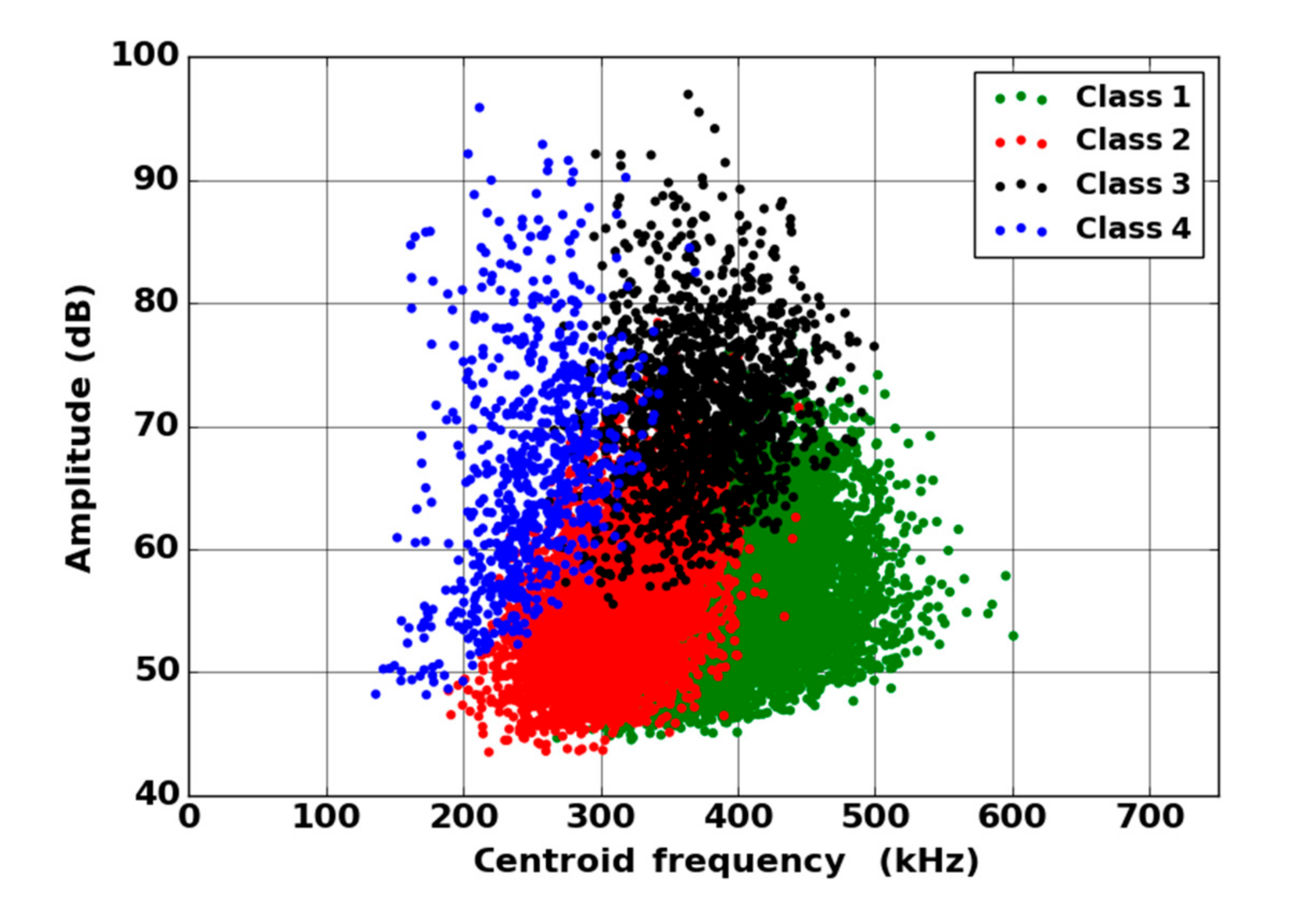
3.4. Unsupervised Clustering and Labelling of the Clusters
4. Conclusion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Newman, B.; Schäfer, W. Processing and Properties of Oxide/Oxide Composites for Industrial Applications; Wiley: Hoboken, NJ, USA, 2006; pp. 600–609. [Google Scholar]
- Wilson, D.; Visser, L. High performance oxide fibers for metal and ceramic composites. Compos. Part A Appl. Sci. Manuf. 2001, 32, 1143–1153. [Google Scholar] [CrossRef]
- Haslam, J.; Berroth, K.; Lange, F. Processing and properties of an all-oxide composite with a porous matrix. J. Eur. Ceram. Soc. 2000, 20, 607–618. [Google Scholar] [CrossRef]
- Levi, C.G.; Yang, J.Y.; Dalgleish, B.J.; Zok, F.W.; Evans, A.G. Processing and Performance of an All-Oxide Ceramic Composite. J. Am. Ceram. Soc. 2005, 81, 2077–2086. [Google Scholar] [CrossRef]
- Kaya, C.; Kaya, F.; Butler, E.G.; Boccaccini, A.R.; Chawla, K.K. Development and characterisation of high-density oxide fiber-reinforced oxide ceramic matrix composites with improved mechanical properties. J. Eur. Ceram. Soc. 2009, 29, 1631–1639. [Google Scholar] [CrossRef]
- Volkmann, E.; Tushtev, K.; Koch, D.; Wilhelmi, C.; Göring, J.; Rezwan, K. Assessment of three oxide/oxide ceramic matrix composites: Mechanical performance and effects of heat treatments. Compos. Part A Appl. Sci. Manuf. 2015, 68, 19–28. [Google Scholar] [CrossRef]
- Ben Ramdane, C.; Julian-Jankowiak, A.; Valle, R.; Renollet, Y.; Parlier, M.; Martin, E.; Diss, P. Microstructure and mechanical behaviour of a NextelTM610/alumina weak matrix composite subjected to tensile and compressive loadings. J. Eur. Ceram. Soc. 2017, 37, 2919–2932. [Google Scholar] [CrossRef]
- Mattoni, M.A.; Yang, J.Y.; Levi, C.G.; Zok, F.W. Effects of Matrix Porosity on the Mechanical Properties of a Porous-Matrix, All-Oxide Ceramic Composite. J. Am. Ceram. Soc. 2001, 84, 2594–2602. [Google Scholar] [CrossRef]
- Zok, F.W.; Levi, C.G. Mechanical properties of porous-matrix ceramic composites. Adv. Eng. Mater. 2001, 3, 15–23. [Google Scholar] [CrossRef]
- Kostopoulos, V.; Loutas, T.; Kontsos, A.; Sotiriadis, G.; Pappas, Y. On the identification of the failure mechanisms in oxide/oxide composites using acoustic emission. NDT E Int. 2003, 36, 571–580. [Google Scholar] [CrossRef]
- Weaver, J.H.; Rannou, J.; Mattoni, M.A.; Zok, F.W. Interface Properties in a Porous-Matrix Oxide Composite. J. Am. Ceram. Soc. 2006, 89, 2077–2086. [Google Scholar] [CrossRef]
- Godin, N.; Reynaud, P.; Fantozzi, G. Acoustic Emission and Durability of Composite Materials; Wiley: Hoboken, NJ, USA, 2018; ISBN 9781786300195. [Google Scholar]
- Sause, M.G.R.; Schmitt, S.; Kalafat, S. Failure load prediction for fiber-reinforced composites based on acoustic emission. Compos. Sci. Technol. 2018, 164, 24–33. [Google Scholar] [CrossRef]
- Loutas, T.; Eleftheroglou, N.; Zarouchas, D. A data-driven probabilistic framework towards the in-situ prognostics of fatigue life of composites based on acoustic emission data. Compos. Struct. 2017, 161, 522–529. [Google Scholar] [CrossRef]
- Godin, N.; Reynaud, P.; Fantozzi, G. Contribution of AE analysis in order to evaluate time to failure of ceramic matrix composites. Eng. Fract. Mech. 2019, 210, 452–469. [Google Scholar] [CrossRef]
- Anastassopoulos, A.; Philippidis, T.P. Clustering methodology for the evaluation of acoustic emission from composites. J. Acoust. Emiss. 1995, 13, 11–12. [Google Scholar]
- Godin, N.; Reynaud, P.; Fantozzi, G. Challenges and Limitations in the Identification of Acoustic Emission Signature of Damage Mechanisms in Composites Materials. Appl. Sci. 2018, 8, 1267. [Google Scholar] [CrossRef]
- Le Gall, T.; Monnier, T.; Fusco, C.; Godin, N.; Hebaz, S.E. Towards Quantitative Acoustic Emission by Finite Element Modelling: Contribution of Modal Analysis and Identification of Pertinent Descriptors. Appl. Sci. 2018, 8, 2557. [Google Scholar] [CrossRef]
- Hamam, Z.; Godin, N.; Fusco, C.; Monnier, T. Modelling of Acoustic Emission Signals Due to Fiber Break in a Model Composite Carbon/Epoxy: Experimental Validation and Parametric Study. Appl. Sci. 2019, 9, 5124. [Google Scholar] [CrossRef]
- Luo, R.C.; Yih, C.C.; Su, K.L. Multisensor fusion and integration: Approaches, applications, and future research directions. IEEE Sens. J. 2002, 2, 107–119. [Google Scholar] [CrossRef]
- Zhang, R.; Nie, F.; Li, X.; Wei, X. Feature selection with multi-view data: A survey. Inf. Fusion 2019, 50, 158–167. [Google Scholar] [CrossRef]
- Llinas, J.; Hall, D. An Introduction to Multi-Sensor Data Fusion; IEEE: Piscataway, NJ, USA, 2002. [Google Scholar] [CrossRef]
- Gros, X.E. Multisensor Data Fusion and Integration in NDT. In Applications of NDT Data Fusion; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2001; pp. 1–12. [Google Scholar]
- Eleftheroglou, N.; Zarouchasa, D.; Loutas, T.; Alderliesten, R.; Benedictus, R. Structural health monitoring data fusion for in-situ life prognosis of composite structures. Reliab. Eng. Syst. Saf. 2018, 178, 40–54. [Google Scholar] [CrossRef]
- Yang, J.; Yang, J.-Y.; Zhang, D.; Lu, J.-F. Feature fusion: Parallel strategy vs. serial strategy. Pattern Recognit. 2003, 36, 1369–1381. [Google Scholar] [CrossRef]
- Morscher, G.N.; Gyekenyesi, A.L. The velocity and attenuation of acoustic emission waves in SiC/SiC composites loaded in tension. Compos. Sci. Technol. 2002, 62, 1171–1180. [Google Scholar] [CrossRef]
- Hatano, H. Acoustic-emission transducer and its absolute calibration. J. Acoust. Soc. Am. 1976, 59, 344. [Google Scholar] [CrossRef]
- Dia, S.; Monnier, T.; Godin, N.; Zhang, F. Primary Calibration of Acoustic Emission Sensors by the Method of Reciprocity, Theoretical and Experimental Considerations. J. Acoust. Emiss. 2012, 30, 152–166. [Google Scholar]
- Goujon, L.; Baboux, J.C. Behaviour of acoustic emission sensors using broadband calibration techniques. Meas. Sci. Technol. 2003, 14, 903–908. [Google Scholar] [CrossRef]
- Morizet, N.; Godin, N.; Tang, J.; Maillet, E.; Frégonèse, M.; Normand, B. Classification of acoustic emission signals using wavelets and Random Forests: Application to localized corrosion. Mech. Syst. Signal Process. 2016, 70, 1026–1037. [Google Scholar] [CrossRef]
- Fowler, T.J. Acoustic emission of fiber reinforced plastics. J. Tech. Counc. ASCE 1979, 105, 281–289. [Google Scholar]
- Pohl, C.; Van Genderen, J.L. Review article Multisensor image fusion in remote sensing: Concepts, methods and applications. Int. J. Remote. Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef]
- D’Costa, A.; Sayeed, A.M. Collaborative Signal Processing for Distributed Classification in Sensor Networks. Information Processing in Sensor Networks; Springer: Berlin, Germany, 2003. [Google Scholar]
- Moevus, M.; Godin, N.; R’Mili, M.; Rouby, D.; Reynaud, P.; Fantozzi, G.; Farizy, G. Analysis of damage mechanisms and associated acoustic emission in two SiCf/[Si–B–C] composites exhibiting different tensile behaviours. Part II: Unsupervised acoustic emission data clustering. Compos. Sci. Technol. 2008, 68, 1258–1265. [Google Scholar] [CrossRef]
- Davies, D.L.; Bouldin, D.W. A Cluster Separation Measure. IEEE Trans. Pattern Anal. Mach. Intell. 1979, 1, 224–227. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Silhouettes: A graphical aid to the interpretation and validation of cluster analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef]
- Sibil, A.; Godin, N.; R’Mili, M.; Maillet, E.; Fantozzi, G. Optimization of Acoustic Emission Data Clustering by a Genetic Algorithm Method. J. Nondestruct. Eval. 2012, 31, 169–180. [Google Scholar] [CrossRef]
- Caty, O.; Mazars, V.; Bertrand, R.; Denneulin, S.; Couegnat, G.; Vignoles, G. Application of X-Ray computed micro-tomography to the study of damage, self healing and oxidation of thermostructural composite. In Proceedings of the 17th European Conference on Composite Materials, Munich, Germany, 26–30 June 2016. [Google Scholar]
- Sause, M.G.R.; Horn, S. Simulation of Acoustic Emission in Planar Carbon Fiber Reinforced Plastic Specimens. J. Nondestruct. Eval. 2010, 29, 123–142. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Descriptor | Unit |
|---|---|
| Time Features | |
| Amplitude | dB |
| Duration | µs |
| Energy, E | attoJ |
| Zero-crossing rate | % |
| Rise time | µs |
| Temporal centroid | µs |
| Entropy | - |
| Frequency Features | |
| Partial Power 1 ([0; 200] kHz), PP1 (0–200kHz) | % |
| Partial Power 2 ([200; 400] kHz), PP2 (200–400kHz) | % |
| Partial Power 3 ([400; 800] kHz), PP3 (400–800kHz) | % |
| Partial Power 4 ([800; 1200] kHz), PP4 (800–1200kHz) | % |
| Centroid frequency | kHz |
| Peak frequency | kHz |
| Spectral spread | kHz |
| Spectral skewness | - |
| Spectral kurtosis | - |
| Roll-off frequency (90%), fcut | kHz |
| Roll-on frequency (10%), fop | kHz |
| Combined descriptors | |
| Rise time/Duration | - |
| Duration/Amplitude | µs·dB−1 |
| Decay time (Duration –Rise time) | µs |
| Rise angle (Amplitude/Rise time) | dB/µs |
| Rise time/Decay Time | - |
| Energy/Amplitude | attoJ·dB−1 |
| Amplitude/Centroid frequency | dB·kHz−1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guel, N.; Hamam, Z.; Godin, N.; Reynaud, P.; Caty, O.; Bouillon, F.; Paillassa, A. Data Merging of AE Sensors with Different Frequency Resolution for the Detection and Identification of Damage in Oxide-Based Ceramic Matrix Composites. Materials 2020, 13, 4691. https://doi.org/10.3390/ma13204691
Guel N, Hamam Z, Godin N, Reynaud P, Caty O, Bouillon F, Paillassa A. Data Merging of AE Sensors with Different Frequency Resolution for the Detection and Identification of Damage in Oxide-Based Ceramic Matrix Composites. Materials. 2020; 13(20):4691. https://doi.org/10.3390/ma13204691
Chicago/Turabian StyleGuel, Nicolas, Zeina Hamam, Nathalie Godin, Pascal Reynaud, Olivier Caty, Florent Bouillon, and Aude Paillassa. 2020. "Data Merging of AE Sensors with Different Frequency Resolution for the Detection and Identification of Damage in Oxide-Based Ceramic Matrix Composites" Materials 13, no. 20: 4691. https://doi.org/10.3390/ma13204691
APA StyleGuel, N., Hamam, Z., Godin, N., Reynaud, P., Caty, O., Bouillon, F., & Paillassa, A. (2020). Data Merging of AE Sensors with Different Frequency Resolution for the Detection and Identification of Damage in Oxide-Based Ceramic Matrix Composites. Materials, 13(20), 4691. https://doi.org/10.3390/ma13204691