Analysis of Force Signals for the Estimation of Surface Roughness during Robot-Assisted Polishing



Abstract
1. Introduction
2. Experimental Procedure
2.1. Polishing Tests
2.2. Acquisition of Force Signal during Polishing Tests
2.3. Surface Roughness Measurements
2.4. Analysis of Force Data
3. Results and Discussion
4. Conclusions
- -
- After 180 polishing passes under the polishing conditions used in this study, the endpoint detection is almost reached; this is after 45 min of polishing under the cutting conditions employed in this study.
- -
- In spite of the fact that for the all the polishing tests a constant contact force between the tool and the workpiece was applied, different features extracted from the signal force detected during the process can be considered valuable data for the indirect evaluation of surface roughness.
- -
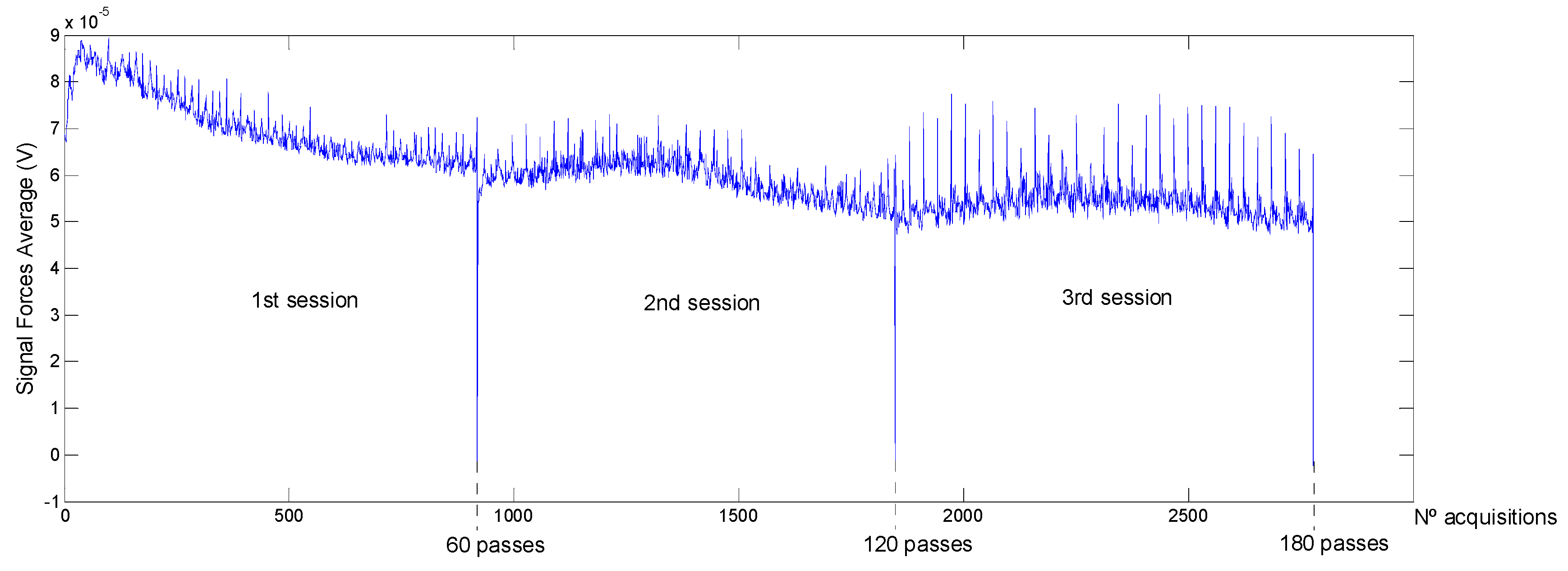
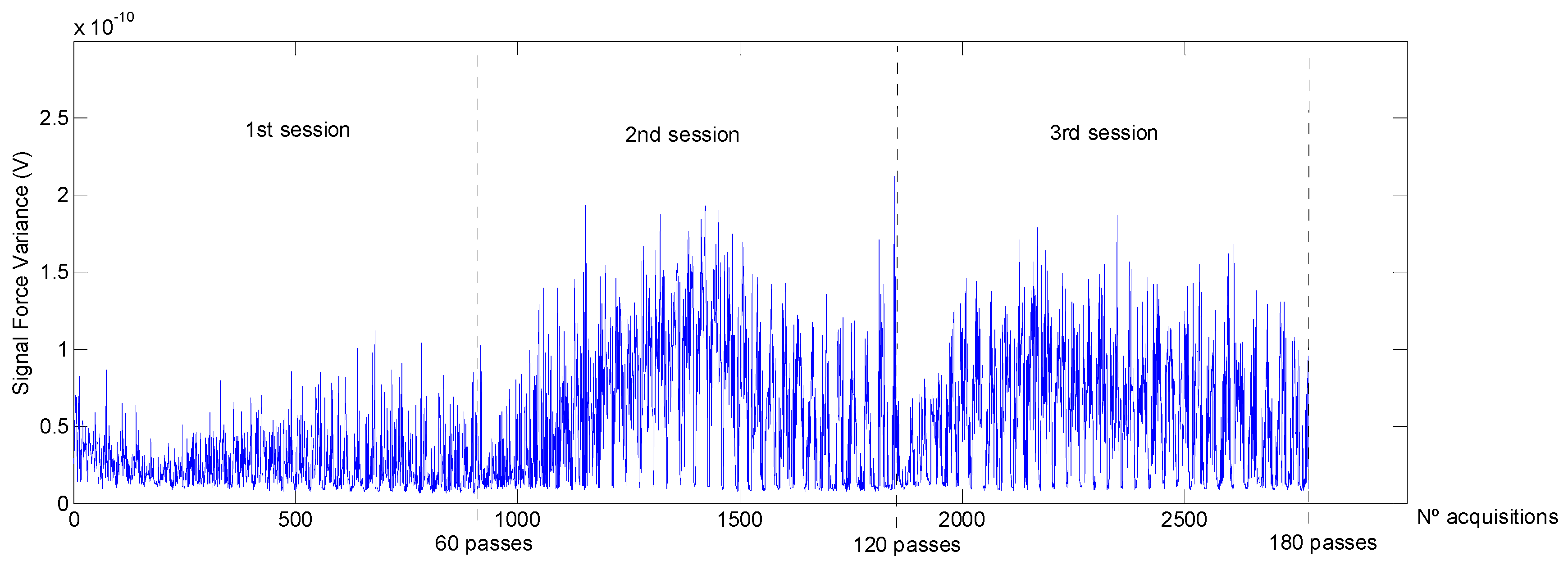
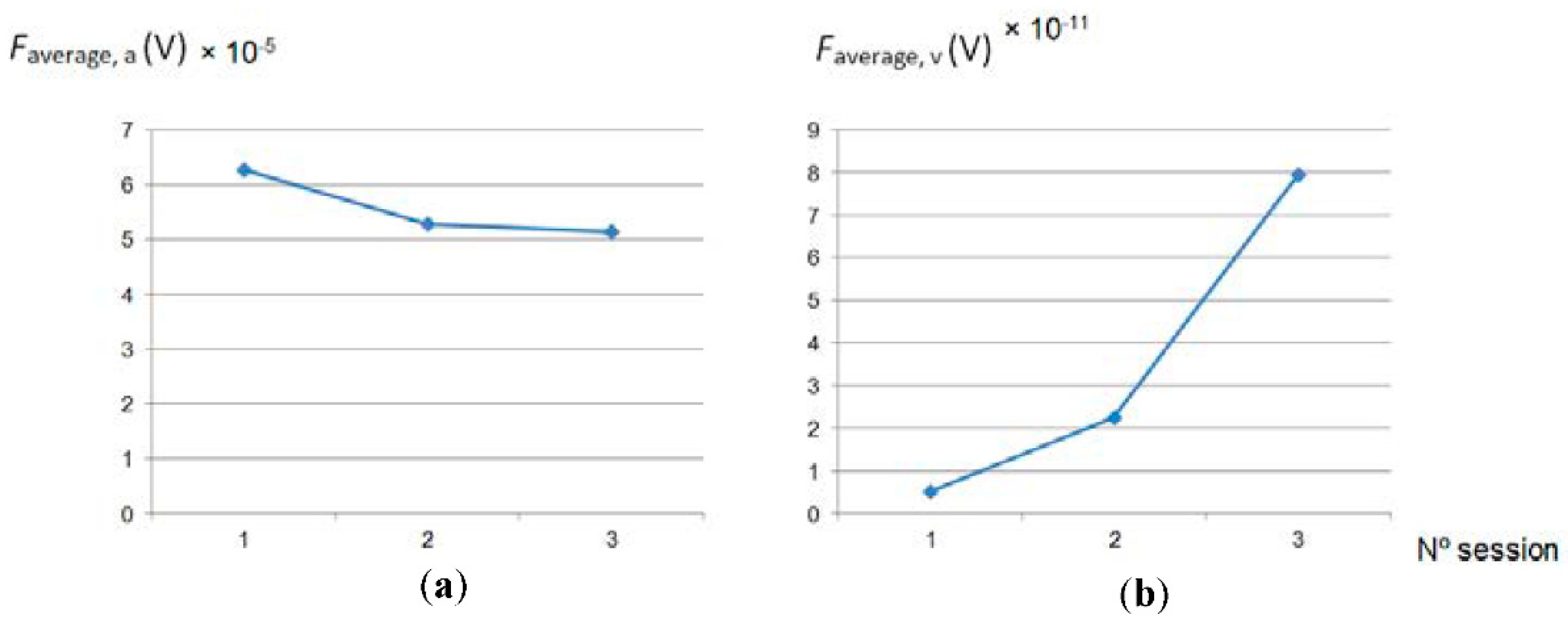
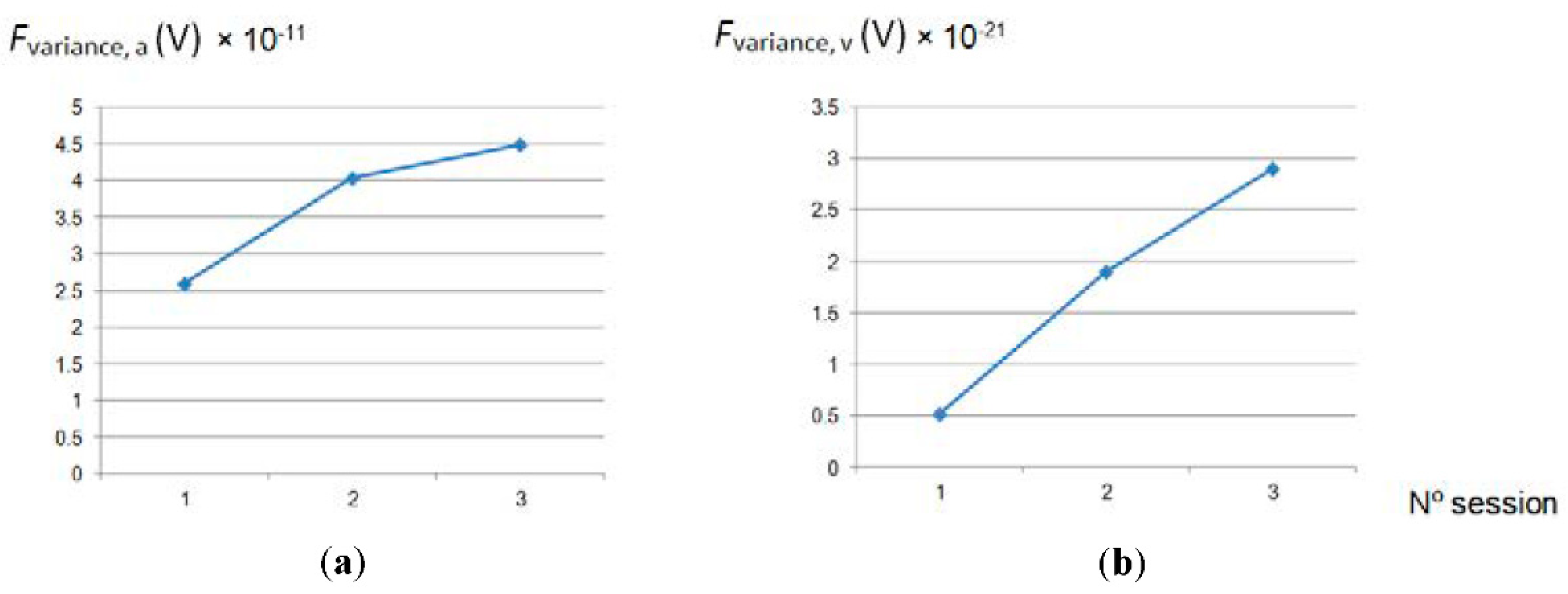
- In the time domain, average and variance were calculated for each acquisition of force signal and from these signals a feature per polishing session (average and variance) was extracted to compare with the surface roughness, designated in this study by Faverage,a, Faverage,v, Fvariance,a and Fvariance,v. This makes their relationship with the surface roughness, in the case of Faverage,a, proportional, and in the case of Faverage,v, Fvariance,a and Fvariance,v, inversely proportional.
- -
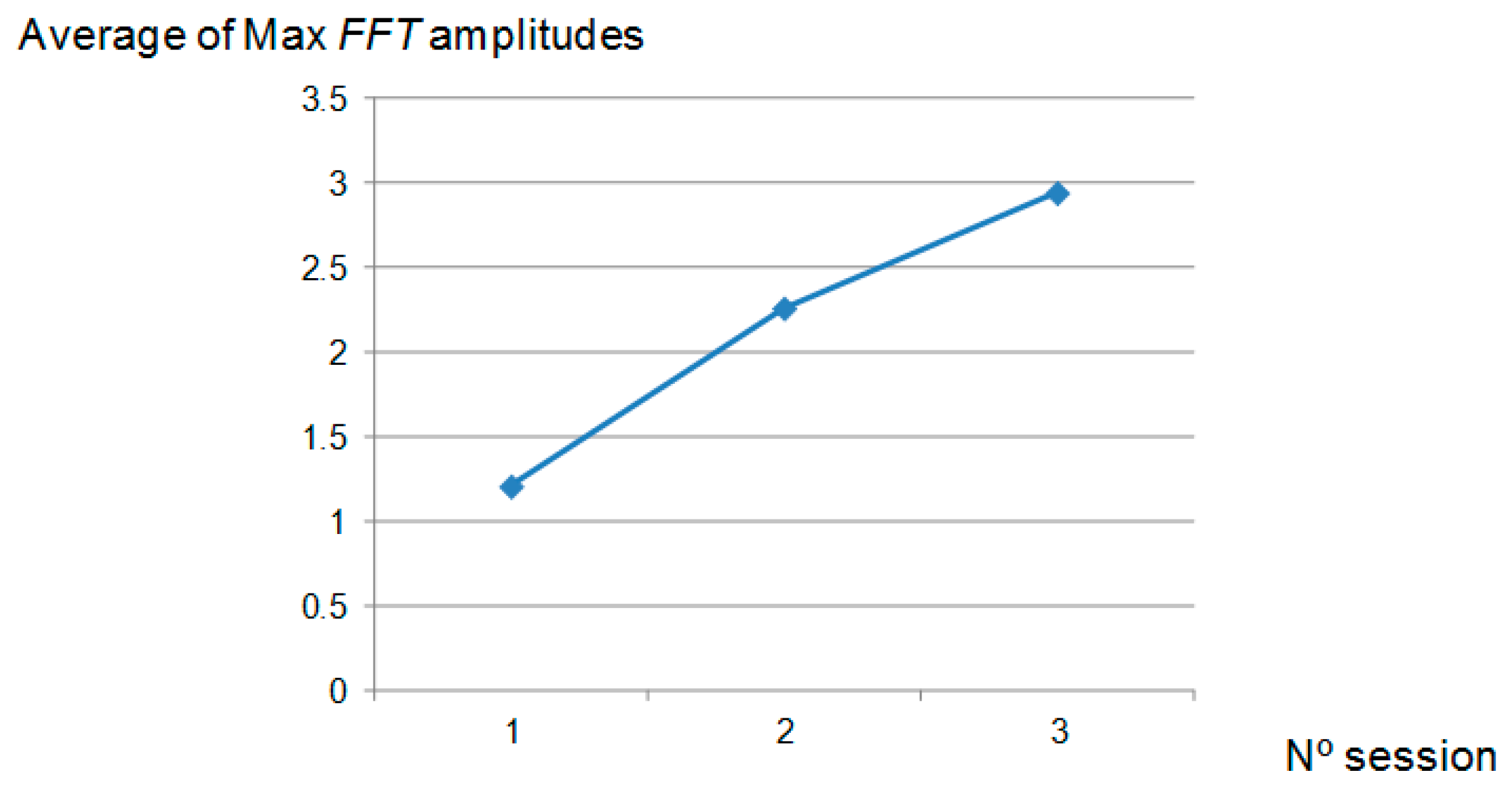
- In the frequency domain, within the range of frequencies between 100 and 1000 Hz a feature was calculated. This is the maximum amplitude of the peak reached in the range of frequencies for each acquisition of force signal. The average calculated per polishing session is inversely proportional to the surface roughness, so it is a valuable feature for the estimation of Ra in polishing processes.
- -
- Finally, for future research it is proposed to collect valuable data from the force signal (concretely average feature according to this study) during polishing processes, together with features extracted from other sensors, to further develop polishing systems.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liao, L.; Xi, F.; Liu, K. Modeling and control of automated polishing/deburring process using a dual-purpose compliant tool head. Int. J. Mach. Tools Manuf. 2008, 48, 1454–1463. [Google Scholar] [CrossRef]
- Ahn, J.H.; Shen, Y.F.; Kim, H.Y.; Jeong, H.D.; Cho, K.K. Development of a sensor information integrated expert system for optimizing die polishing. Robot. Comput. Integr. Manuf. 2001, 17, 269–276. [Google Scholar] [CrossRef]
- Yin, Y.H.; Hu, H.; Xia, Y.C. Active tracking unknown surface using force sensing and control technique for robot. Sens. Actuators A Phys. 2004, 112, 313–319. [Google Scholar] [CrossRef]
- Güvenç, L. An overview of robot-assisted die and mold polishing with emphasis on process modeling. J. Manuf. Syst. 1997, 16, 48–58. [Google Scholar] [CrossRef]
- Yoshikawa, T. Dynamic hybrib position/force control of robot manipulators-description of hand contraints and calculations of joint driving force. J. Robot. Autom. 1987, 3, 386–392. [Google Scholar] [CrossRef]
- Huissoon, J.P.; Ismail, F.; Jafari, A.; Bedi, S. Automated polishing of die steel surfaces. Int. J. Adv. Manuf. Technol. 2002, 19, 285–290. [Google Scholar] [CrossRef]
- Kakinuma, Y.; Igarashi, K.; Katsura, S.; Aoyama, T. Development of 5-axis polishing machine capable of simultaneous trajectory, posture, and force control. CIRP Ann. Manuf. Technol. 2013, 62, 379–382. [Google Scholar] [CrossRef]
- Kuo, R.Y.; Cohen, P.H. Manufacturing process control through integration of neural network and fuzzy model. Fuzzy Sets Syst. 1998, 98, 15–31. [Google Scholar] [CrossRef]
- Rososhansky, M.; Xi, F. Coverage based tool-path planning for automated polishing using contact mechanics theory. J. Manuf. Syst. 2011, 30, 144–153. [Google Scholar] [CrossRef]
- Warkentin, A.; Ismail, S.; Bedi, F. Intersection approach to multi-point machining of sculptured surfaces. Comput. Aided Geom. Des. 1998, 15, 567–584. [Google Scholar] [CrossRef]
- Klocke, F.; Dambon, O.; Schneider, U.; Zunke, R.; Waechter, D. Computer-based monitoring of the polishing processes using LabView. J. Mater. Process. Technol. 2009, 209, 6039–6047. [Google Scholar] [CrossRef]
- Kim, S.Y.; Park, C.J.; Seo, Y.J. Signal analysis of the end point detection method based on motor current. Microelectron. Eng. 2003, 66, 472–479. [Google Scholar] [CrossRef]
- Commercial Standard CS 271-65. Grading of Abrasive Grain for Grinding Wheels; U.S. Department of Commerce: Washington, DC, USA, 12 April 1965.
- ISO 4288:1996 Geometrical Product Specifications (gps). Surface Texture: Profile Method. Rules and Procedures for the Assessment of Surface Texture; ISO: Genève, Switzerland, 1996.
- Chang, Y.P.; Hashimura, M.M.; Dornfeld, D.A. An investigation of the AE Signals in the lapping process. CIRP Ann. Manuf. Technol. 1996, 45, 331–334. [Google Scholar] [CrossRef]
- Lazarev, R. Monitoring and Control of Fine Abrasive Polishing Processes. Ph.D. Thesis, University of Southern Denmark, Sønderborg, Denmark, 2012. [Google Scholar]
- Agustina, B.; Marín, M.M.; Teti, R.; Rubio, E.M. Surface roughness evaluation based on acoustic emission signals in Robot Assisted Polishing. Sens. Actuators A Phys. 2014, 14, 21514–21522. [Google Scholar] [CrossRef] [PubMed]
- Ahn, J.H.; Lee, M.C.; Jeong, H.D.; Kim, S.R.; Cho, K.K. Intelligently automated polishing for high quality surface formation of sculptured die. J. Mater. Process. Technol. 2002, 133–134, 339–344. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forces (N) | Voltage Signals (V) |
|---|---|
| 0.0 | 0.00025 |
| 0.98 | 0.0035 |
| 1.96 | 0.0071 |
| 2.94 | 0.011 |
| 4.9 | 0.0185 |
| 6.86 | 0.0263 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Agustina, B.; Marín, M.M.; Teti, R.; Rubio, E.M. Analysis of Force Signals for the Estimation of Surface Roughness during Robot-Assisted Polishing. Materials 2018, 11, 1438. https://doi.org/10.3390/ma11081438
De Agustina B, Marín MM, Teti R, Rubio EM. Analysis of Force Signals for the Estimation of Surface Roughness during Robot-Assisted Polishing. Materials. 2018; 11(8):1438. https://doi.org/10.3390/ma11081438
Chicago/Turabian StyleDe Agustina, Beatriz, Marta María Marín, Roberto Teti, and Eva María Rubio. 2018. "Analysis of Force Signals for the Estimation of Surface Roughness during Robot-Assisted Polishing" Materials 11, no. 8: 1438. https://doi.org/10.3390/ma11081438
APA StyleDe Agustina, B., Marín, M. M., Teti, R., & Rubio, E. M. (2018). Analysis of Force Signals for the Estimation of Surface Roughness during Robot-Assisted Polishing. Materials, 11(8), 1438. https://doi.org/10.3390/ma11081438