Material Characterization of Hardening Soft Sponge Featuring MR Fluid and Application of 6-DOF MR Haptic Master for Robot-Assisted Surgery




Abstract
1. Introduction
2. Hardening Sponge Featuring Magneto-Rheological (MR) Fluid
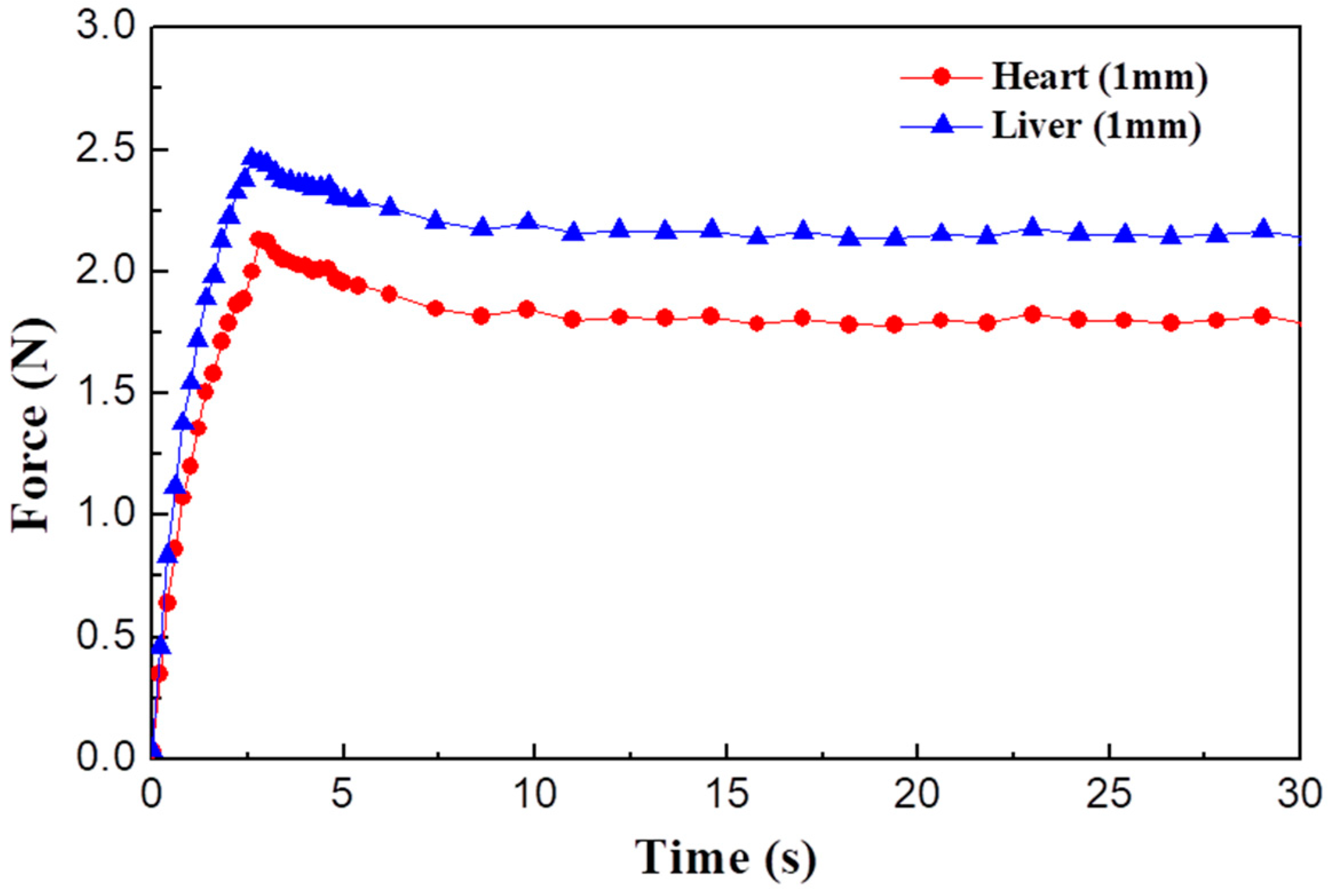
2.1. Force Measurement of Human-Like Tissues
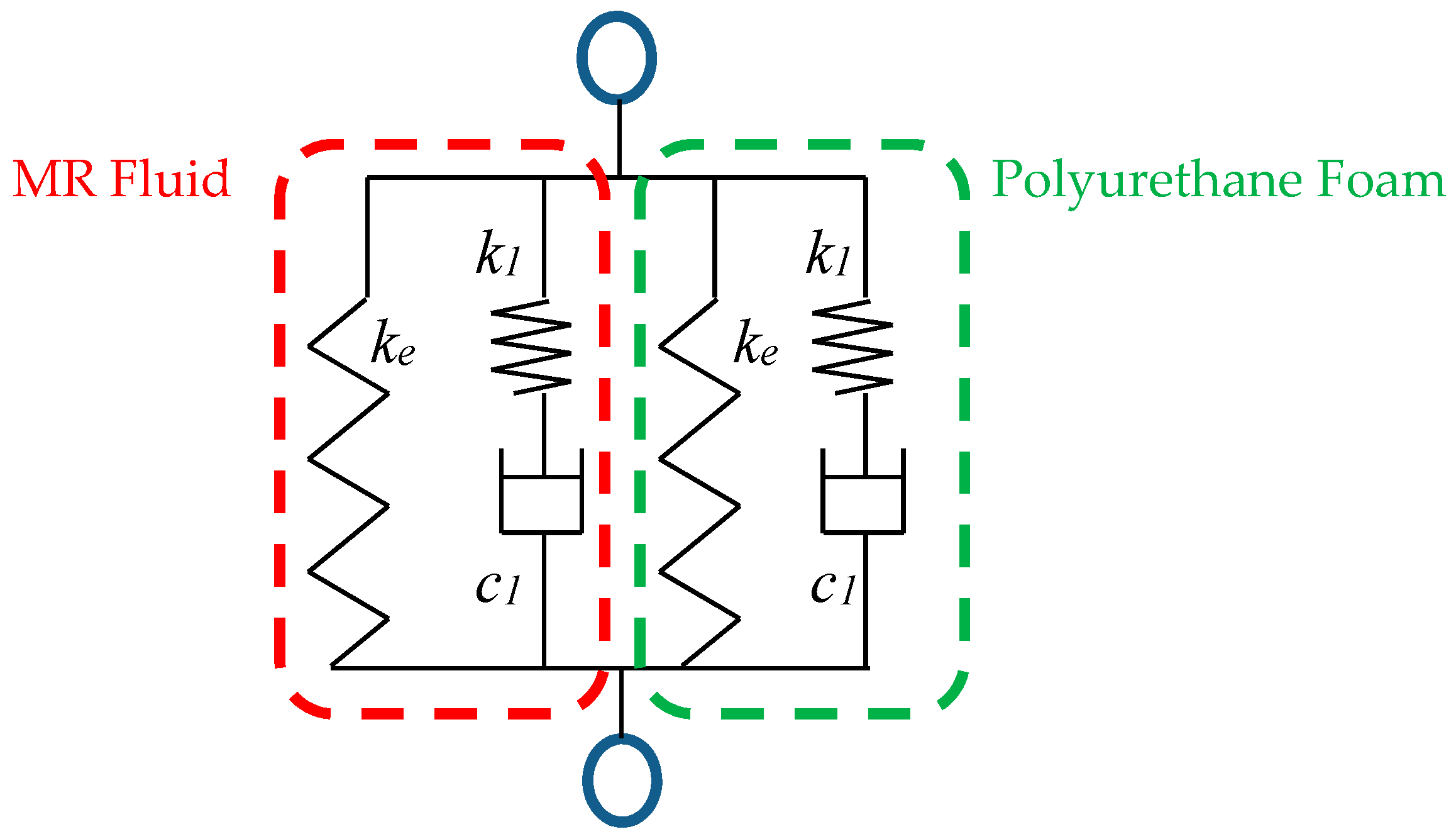
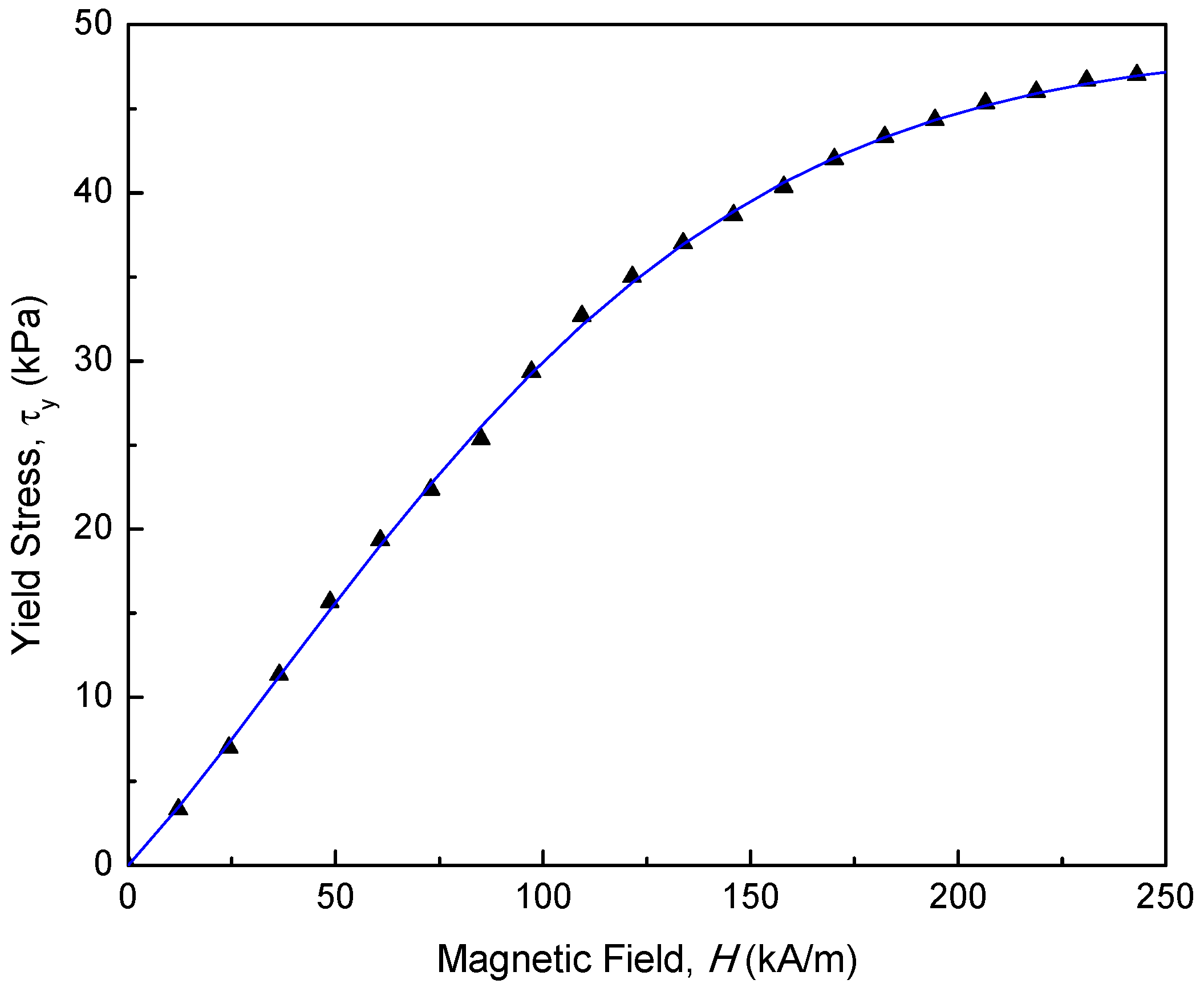
2.2. Material Property of Sponge and MR Fluid
2.3. Fabrication of MR Sponge
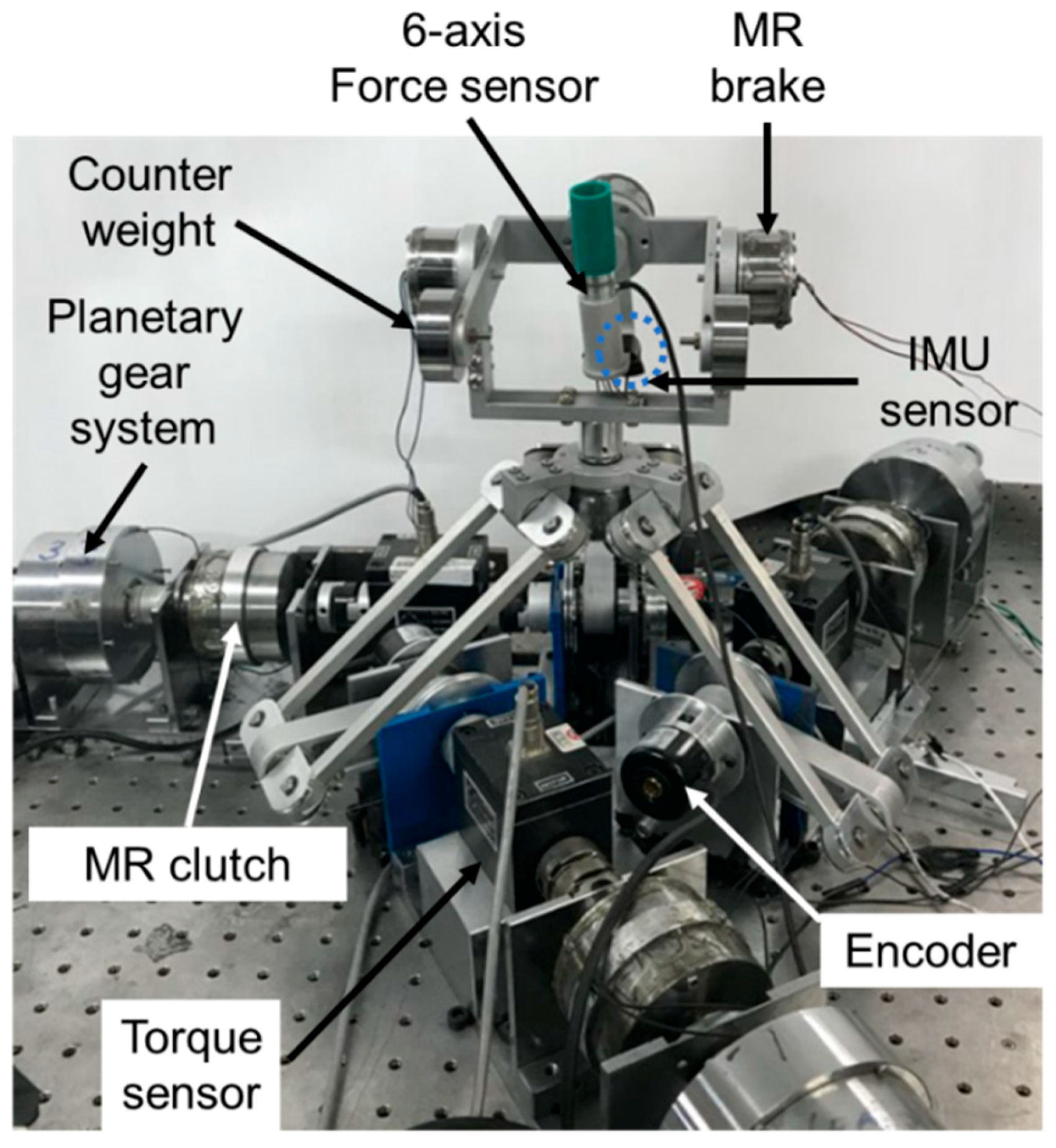
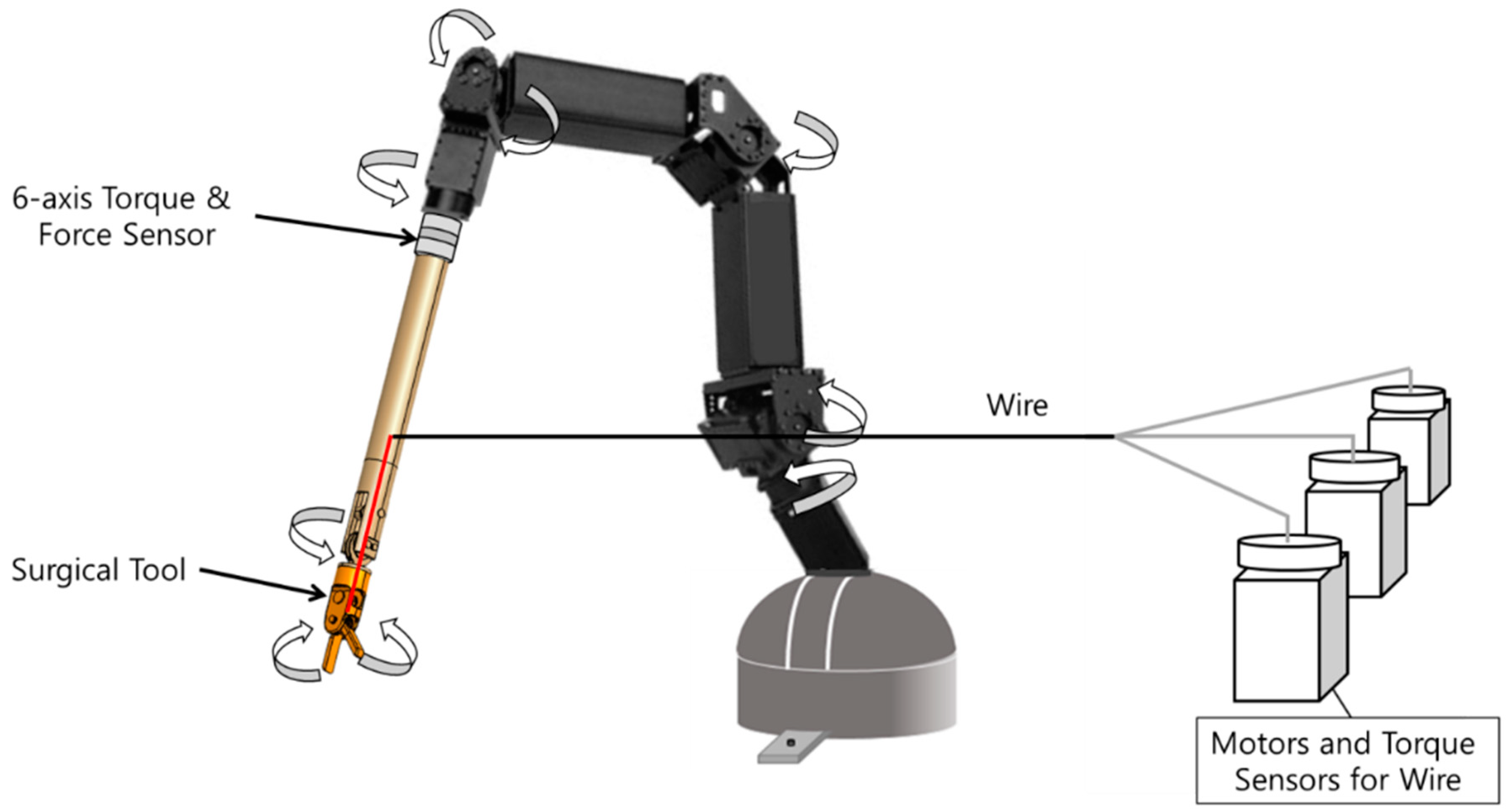
3. 6 Degrees-of-Freedom (DOF) Haptic Master with MR Actuators
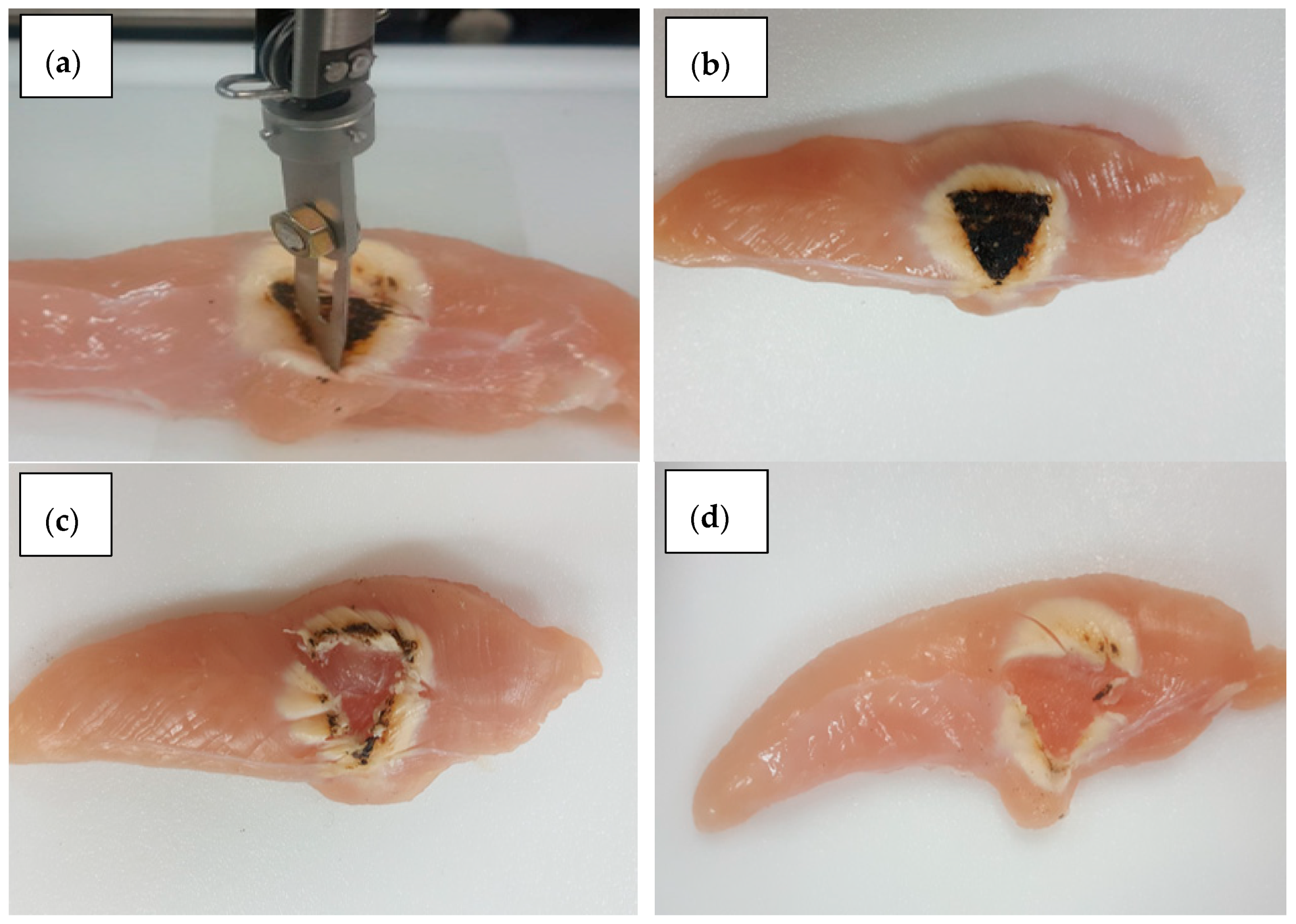
4. Robot Surgery Experiment
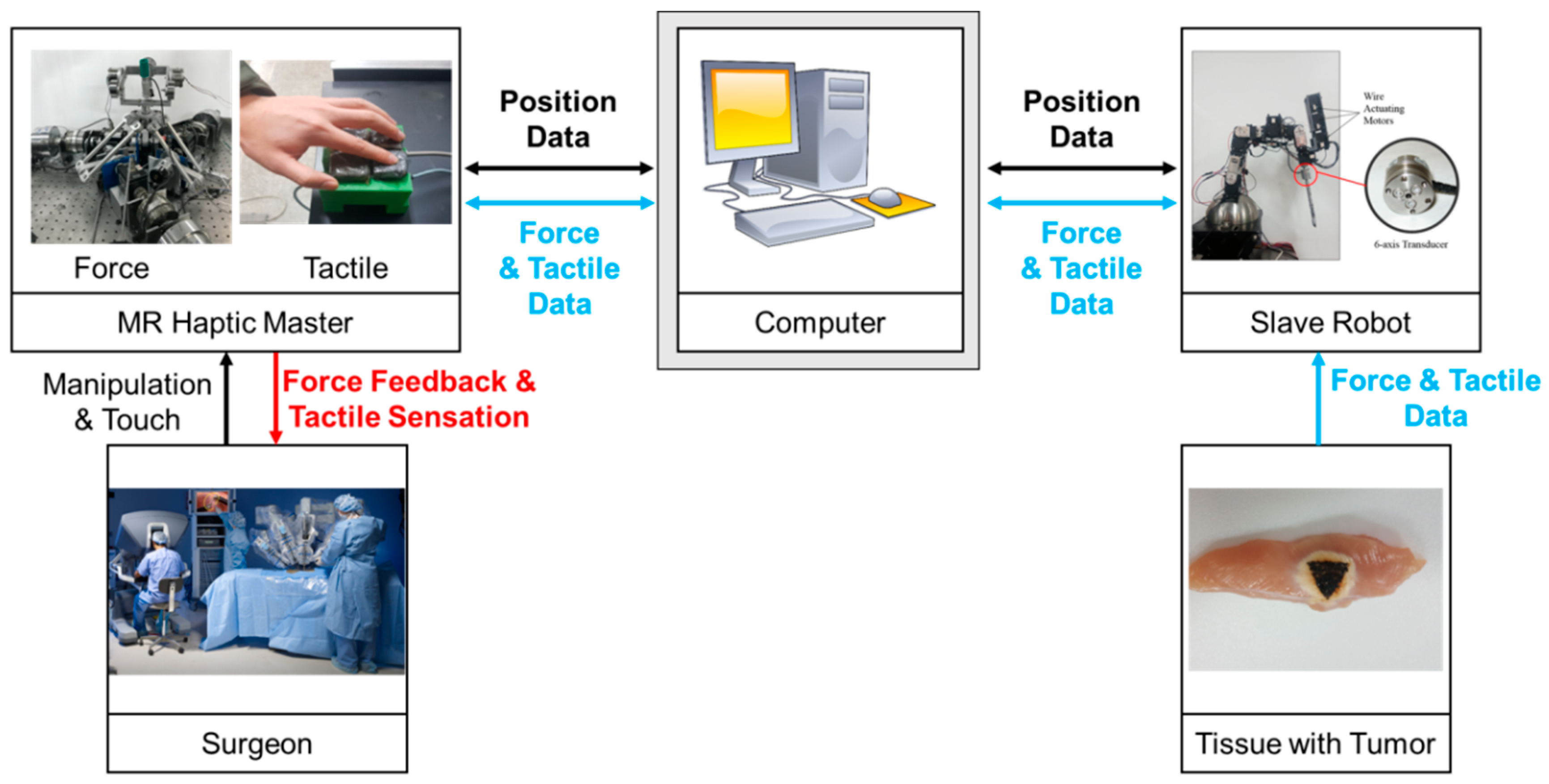
4.1. Integration of Haptic Master and Slave Robot
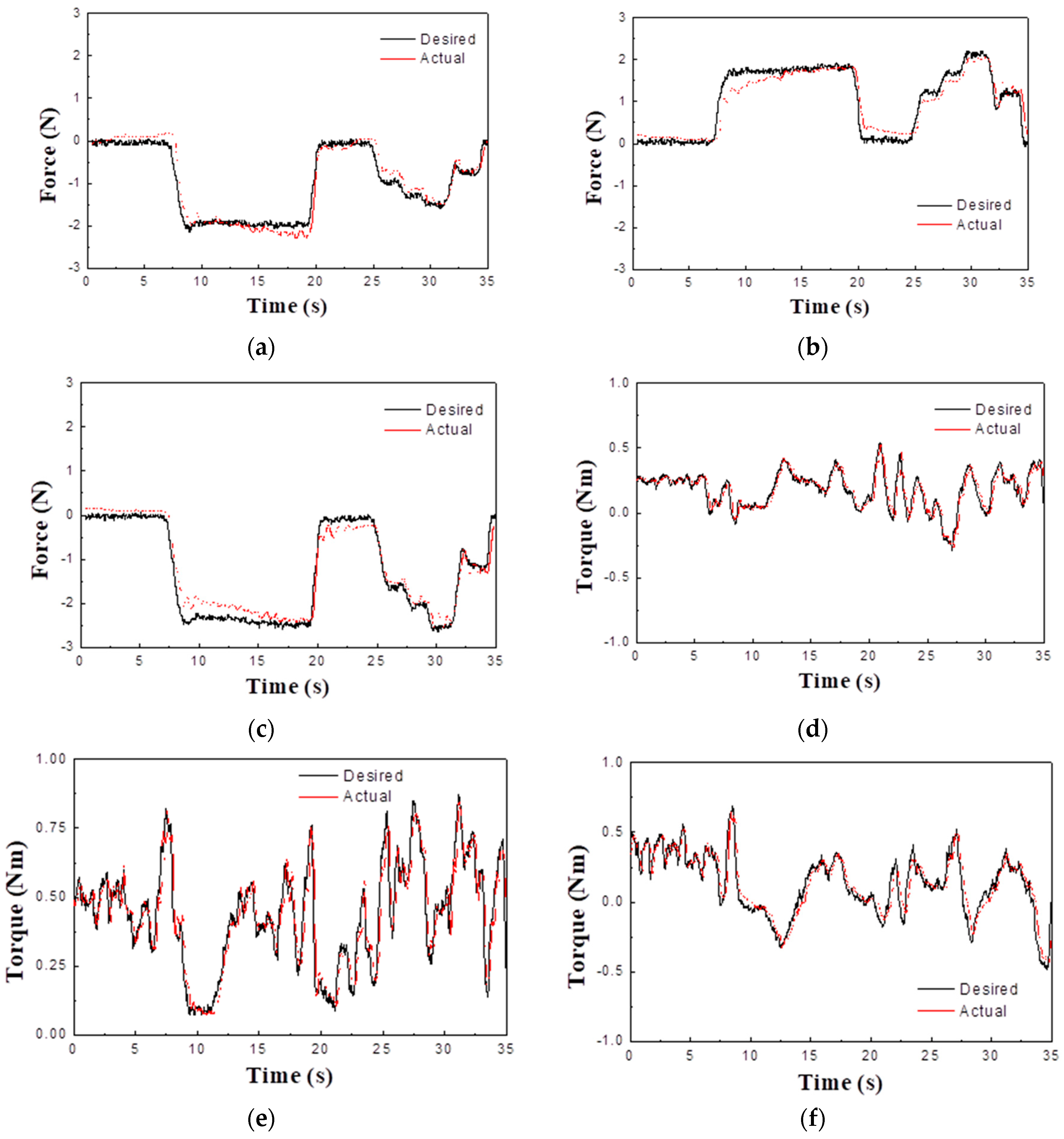
4.2. Experimental Results and Discussion
- Question: Can you distinguish the different stiffness represented by the tactile device?
- Answer: (Negative) 1 ------- 2 ------- 3 (Mean) ------- 4 ------- 5 (Positive)
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pierrot, F.; Dombre, E.; Dégoulange, E.; Urbain, L.; Caron, P.; Boudet, S.; Mégnien, J.L. Hippocrate: A safe robot arm for medical applications with force feedback. Med. Image Anal. 1999, 3, 285–300. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Choi, S.B. Optimal design of a vehicle magnetorheological damper considering the damping force and dynamic range. Smart Mater. Struct. 2008, 18, 015013. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Choi, S.B. Optimal design of an automotive magnetorheological brake considering geometric dimensions and zero-field friction heat. Smart Mater. Struct. 2010, 19, 115024. [Google Scholar] [CrossRef]
- Shafer, A.S.; Kermani, M.R. Design and validation of a magneto-rheological clutch for practical control applications in human-friendly manipulation. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 4266–4271. [Google Scholar]
- Senkal, D.; Gurocak, H. Compact MR-brake with serpentine flux path for haptics applications. In Proceedings of the World Haptics 2009—Third Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Salt Lake City, UT, USA, 18–20 March 2009; pp. 91–96. [Google Scholar]
- Nguyen, P.B.; Choi, S.B. A new approach to magnetic circuit analysis and its application to the optimal design of a bi-directional magnetorheological brake. Smart Mater. Struct. 2011, 20, 125003. [Google Scholar] [CrossRef]
- Tusset, A.M.; Janzen, F.C.; Piccirillo, V.; Rocha, R.T.; Balthazar, J.M.; Litak, G. On nonlinear dynamics of a parametrically excited pendulum using both active control and passive rotational (MR) damper. J. Vib. Control 2018, 24, 1587–1599. [Google Scholar] [CrossRef]
- Ulasyar, A.; Lazoglu, I. Design and analysis of a new magneto rheological damper for washing machine. J. Mech. Sci. Technol. 2018, 32, 1549–1561. [Google Scholar] [CrossRef]
- Li, W.H.; Liu, B.; Kosasih, P.B.; Zhang, X.Z. A 2-DOF MR actuator joystick for virtual reality applications. Sens. Actuators A Phys. 2007, 137, 308–320. [Google Scholar] [CrossRef]
- Senkal, D.; Gurocak, H. Spherical brake with MR fluid as multi degree of freedom actuator for haptics. J. Intell. Mater. Syst. Struct. 2009, 20, 2149–2160. [Google Scholar] [CrossRef]
- Ahmadkhanlou, F.; Washington, G.N.; Bechtel, S.E. Modeling and control of single and two degree of freedom magnetorheological fluid-based haptic systems for telerobotic surgery. J. Intell. Mater. Syst. Struct. 2009, 20, 1171–1186. [Google Scholar] [CrossRef]
- Song, B.K.; Oh, J.S.; Choi, S.B. Design of a new 4-DOF haptic master featuring magnetorheological fluid. Adv. Mech. Eng. 2014, 6, 843498. [Google Scholar] [CrossRef]
- Oh, J.S.; Choi, S.H.; Choi, S.B. Design of a 4-DOF MR haptic master for application to robot surgery: Virtual environment work. Smart Mater. Struct. 2014, 23, 095032. [Google Scholar] [CrossRef]
- Qiu, T.; Hamel, W.R.; Lee, D. Design and control of a low cost 6 DOF master controller. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5313–5318. [Google Scholar]
- Chen, X.; Xin, X.; Zhao, B.; He, Y.; Hu, Y.; Liu, S. Design and analysis of a haptic master manipulator for minimally invasive surgery. In Proceedings of the 2017 IEEE International Conference on Information and Automation (ICIA), Macau, China, 18–20 July 2017; pp. 260–265. [Google Scholar]
- Takei, M.; Shiraiwa, H.; Omata, S.; Motooka, N.; Mitamura, K.; Horie, T.; Ookubo, T.; Sawada, S. A new tactile skin sensor for measuring skin hardness in patients with systemic sclerosis and autoimmune Raynaud’s phenomenon. J. Int. Med. Res. 2004, 32, 222–231. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Ju, F.; Cao, Y.; Wang, Y.; Chen, B. A tactile sensor for measuring hardness of soft tissue with applications to minimally invasive surgery. Sens. Actuators A Phys. 2017, 266, 197–204. [Google Scholar] [CrossRef]
- Han, Y.-M.; Oh, J.-S.; Kim, J.-K.; Choi, S.-B. Design and experimental evaluation of a tactile display featuring magnetorheological fluids. Smart Mater. Struct. 2014, 23, 77001. [Google Scholar] [CrossRef]
- Oh, J.S.; Kim, J.K.; Lee, S.R.; Choi, S.B.; Song, B.K. Design of tactile device for medical application using magnetorheological fluid. J. Phys. Conf. Ser. 2013, 412, 12047. [Google Scholar] [CrossRef]
- Kim, S.; Kim, P.; Park, C.-Y.; Choi, S.-B. A new tactile device using magneto-rheological sponge cells for medical applications: Experimental investigation. Sens. Actuators A Phys. 2016, 239, 61–69. [Google Scholar] [CrossRef]
- Groenen, M.A.M.; Archibald, A.L.; Uenishi, H.; Tuggle, C.K.; Takeuchi, Y.; Rothschild, M.F.; Rogel-Gaillard, C.; Park, C.; Milan, D.; Megens, H.-J.; et al. Analyses of pig genomes provide insight into porcine demography and evolution. Nature 2012, 491, 393–398. [Google Scholar] [CrossRef] [PubMed]
- Nava, A.; Mazza, E.; Furrer, M.; Villiger, P.; Reinhart, W.H. In vivo mechanical characterization of human liver. Med. Image Anal. 2008, 12, 203–216. [Google Scholar] [CrossRef] [PubMed]
- Carter, F.J.; Frank, T.G.; Davies, P.J.; McLean, D.; Cuschieri, A. Measurements and modelling of the compliance of human and porcine organs. Med. Image Anal. 2001, 5, 231–236. [Google Scholar] [CrossRef]
- Cha, S.W.; Kang, S.R.; Hwang, Y.H.; Oh, J.S.; Choi, S.B. A controllable tactile device for human-like tissue realization using smart magneto-rheological fluids: Fabrication and modeling. Smart Mater. Struct. 2018, 27, 065015. [Google Scholar] [CrossRef]
- Bland, D.R. The Theory of Linear Viscoelasticity; Courier Dover Publications: New York, NY, USA, 2016. [Google Scholar]
- MRF-132DG. Available online: http://www.lordmrstore.com/lord-mr-products/mrf-132dg-magneto-rheological-fluid (accessed on 22 July 2018).
- Tsai, L.W.; Walsh, G.C.; Stamper, R.E. Kinematics of a novel three DOF translational platform. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; pp. 3446–3451. [Google Scholar]
- Tavakoli, M. Haptics for Teleoperated Surgical Robotic Systems; World Scientific: Singapore, 2008; Volume 1. [Google Scholar]
- Kim, P.; Kim, S.; Park, Y.D.; Choi, S.B. Force modeling for incisions into various tissues with MRF haptic master. Smart Mater. Struct. 2016, 25, 035008. [Google Scholar] [CrossRef]
- Han, Y.M.; Oh, J.S.; Kim, S.; Choi, S.B. Design of multi-degree motion haptic mechanisms using smart fluid-based devices. Mech. Based Des. Struct. Mach. 2017, 45, 135–144. [Google Scholar] [CrossRef]
- Kang, S.R. Design and Control of 6-DOF Haptic Master Using MR Fluid for Robot Surgery. Master’s Thesis, Inha University, Incheon, Korea, 2018. [Google Scholar]
- Hwang, Y.H. Design of 7-DOF Slave Robot Integrated with Magneto-Rheological Haptic Master. Master’s Thesis, Department of Mechanical Engineering, Inha University, Incheon, Korea, 2018. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MR Clutch | MR Brake | ||||
|---|---|---|---|---|---|
| Parameter | Explanation | Value | Parameter | Explanation | Value |
| Diameter of the MR clutch rotor | 50 mm | Internal diameter of the MR brake rotors | 4 mm | ||
| Diameter of the MR clutch’s outer housing | 61 mm | External diameter of the MR brake rotors | 34 mm | ||
| Diameter of the MR clutch’s shaft | 10 mm | Height of the rotor | 7 mm | ||
| Gap of the MR fluid | 1 mm | Height of the coil | 10 mm | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, J.-S.; Sohn, J.W.; Choi, S.-B. Material Characterization of Hardening Soft Sponge Featuring MR Fluid and Application of 6-DOF MR Haptic Master for Robot-Assisted Surgery. Materials 2018, 11, 1268. https://doi.org/10.3390/ma11081268
Oh J-S, Sohn JW, Choi S-B. Material Characterization of Hardening Soft Sponge Featuring MR Fluid and Application of 6-DOF MR Haptic Master for Robot-Assisted Surgery. Materials. 2018; 11(8):1268. https://doi.org/10.3390/ma11081268
Chicago/Turabian StyleOh, Jong-Seok, Jung Woo Sohn, and Seung-Bok Choi. 2018. "Material Characterization of Hardening Soft Sponge Featuring MR Fluid and Application of 6-DOF MR Haptic Master for Robot-Assisted Surgery" Materials 11, no. 8: 1268. https://doi.org/10.3390/ma11081268
APA StyleOh, J.-S., Sohn, J. W., & Choi, S.-B. (2018). Material Characterization of Hardening Soft Sponge Featuring MR Fluid and Application of 6-DOF MR Haptic Master for Robot-Assisted Surgery. Materials, 11(8), 1268. https://doi.org/10.3390/ma11081268