
Assessing the Potential of Plug-in Electric Vehicles in Active Distribution Networks


 ,
,  and
and
Abstract
:1. Introduction
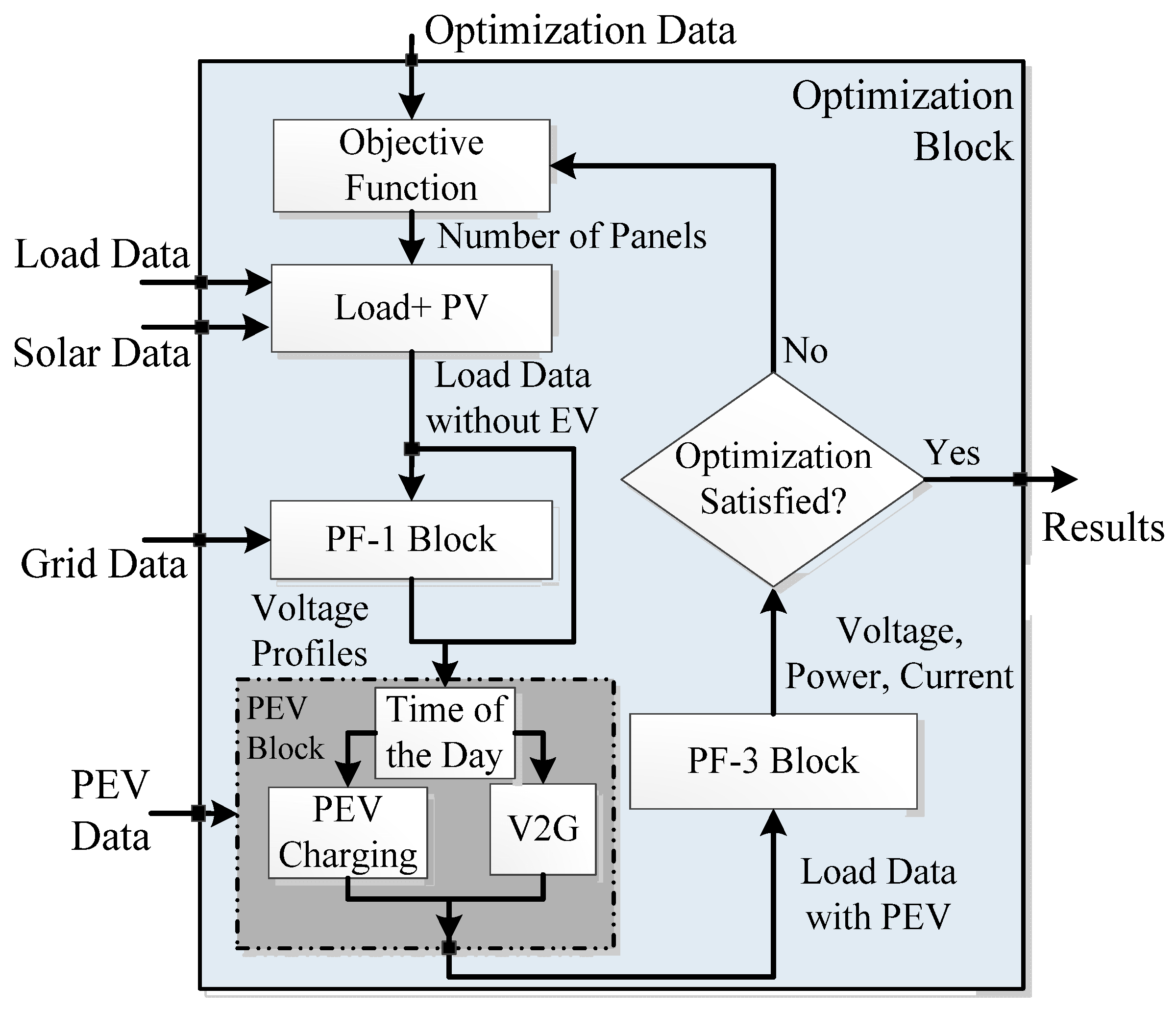
2. Proposed Intelligent Algorithm

2.1. Objective Function
- (1)
- Voltage of all buses must stay within a specific limit:
- (2)
- PF through the transformer must be less than transformer nominal power (transformer capacity), as presented in Equation (10):
- (3)
- Line currents should never exceed the nominal currents of the cables:
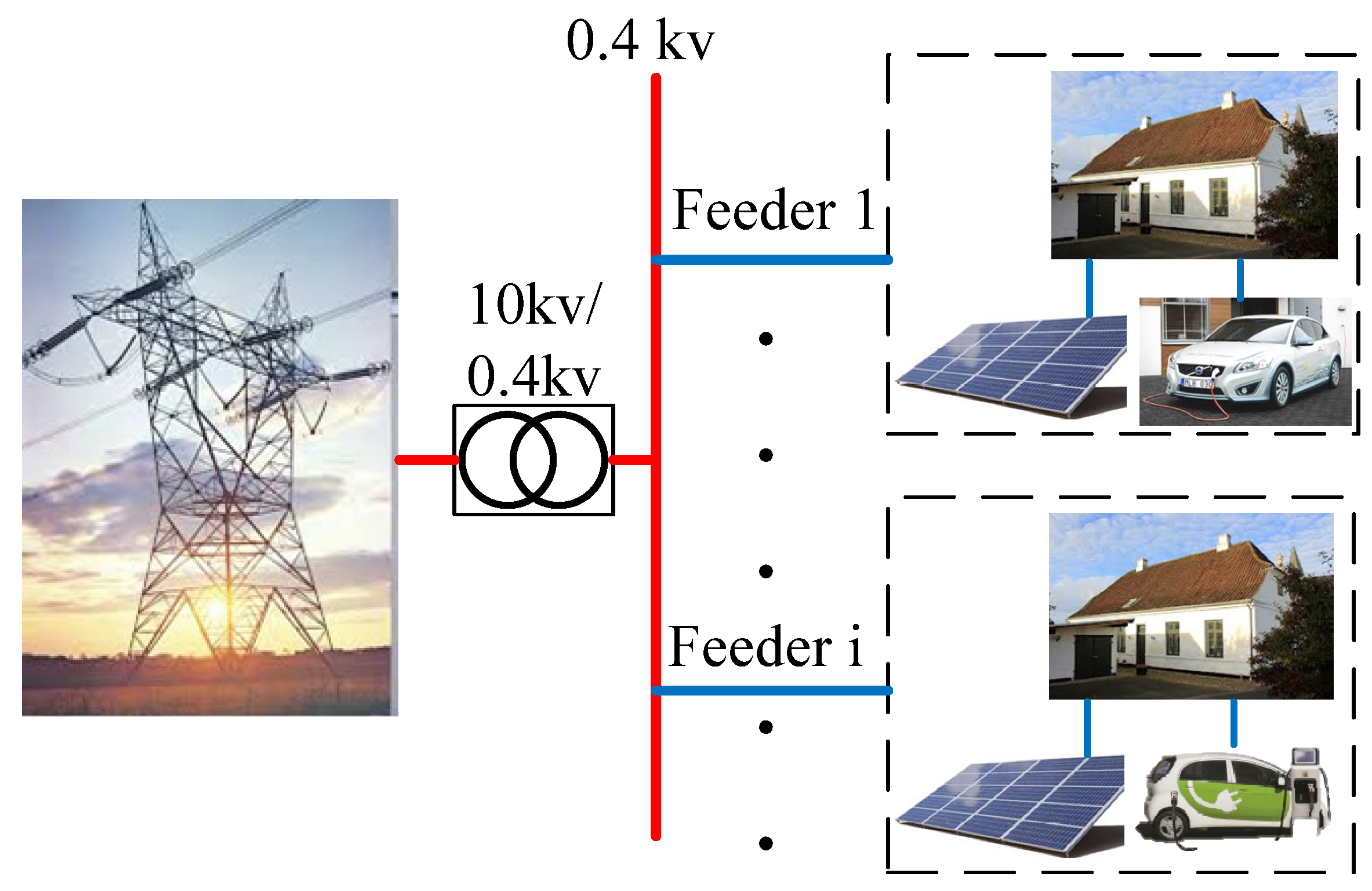
2.2. “Load + Photovoltaic” Block
2.3. Power Flow-1 Block
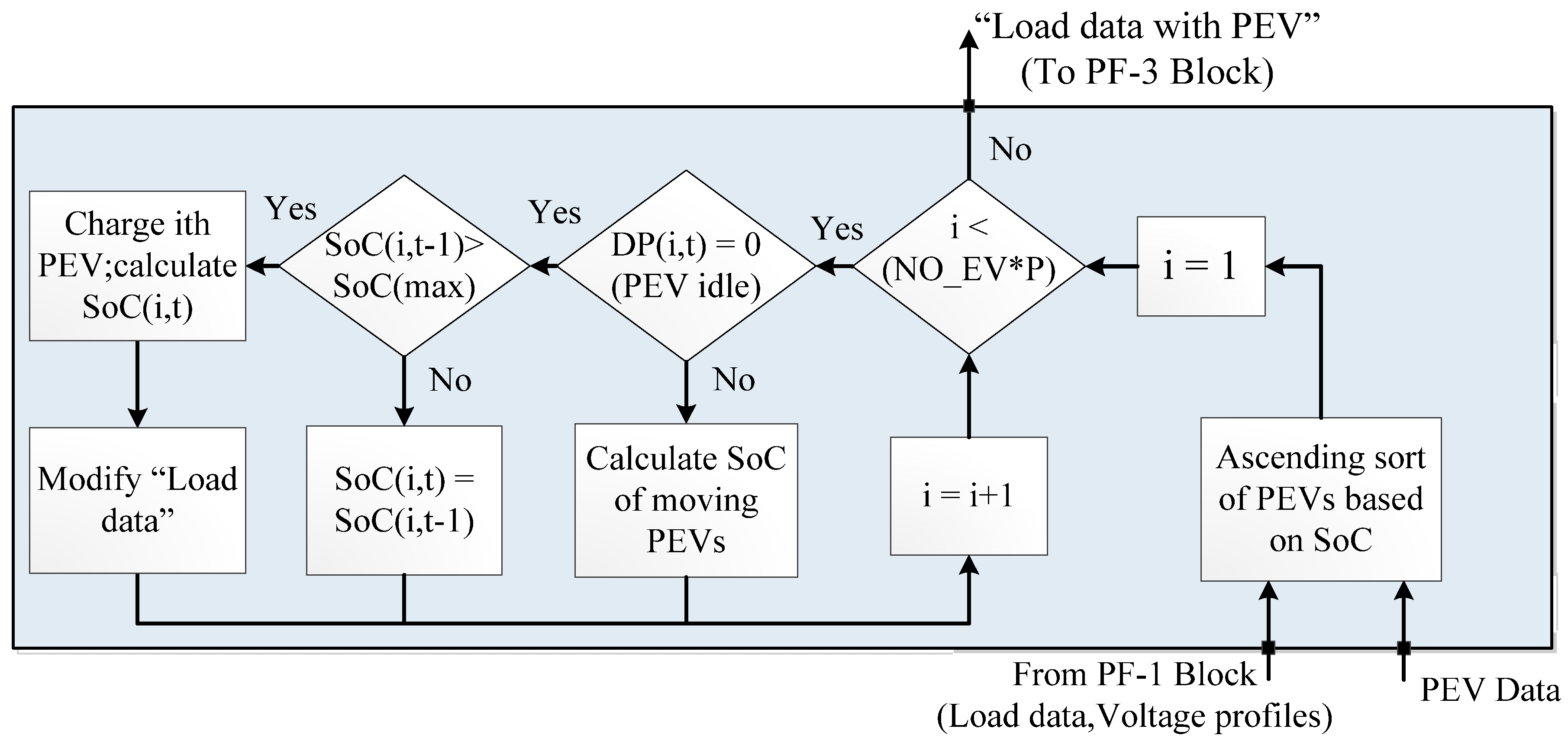
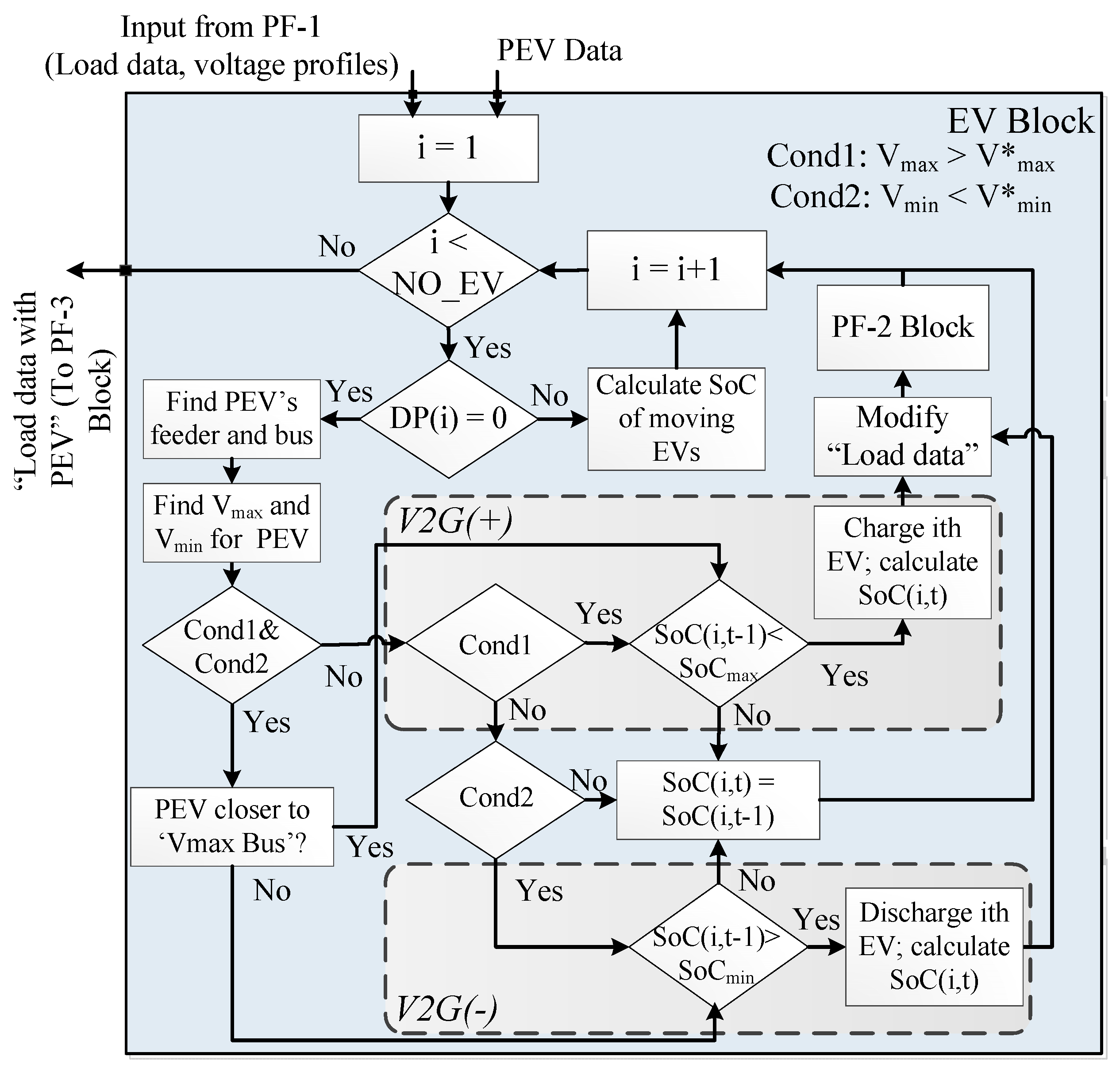
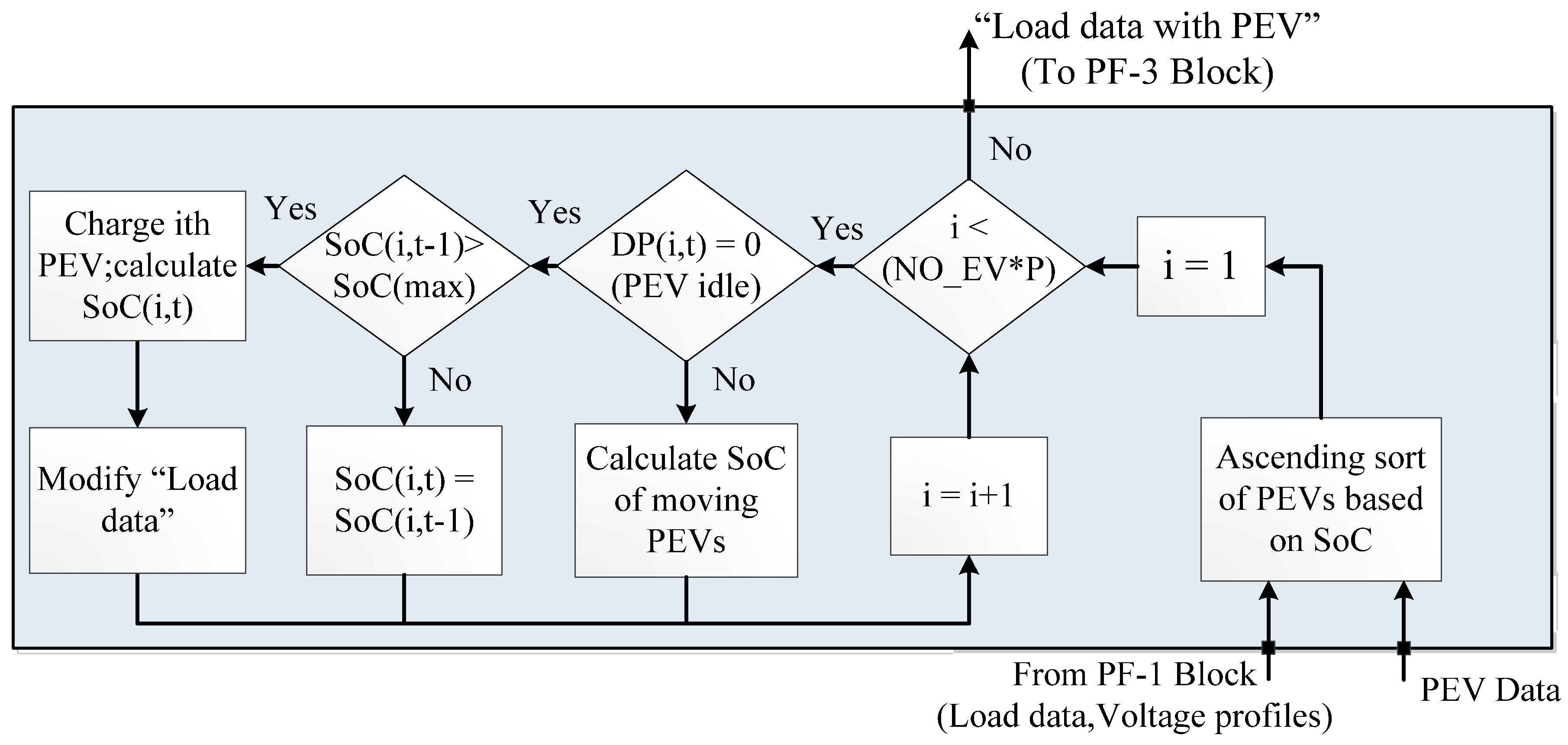
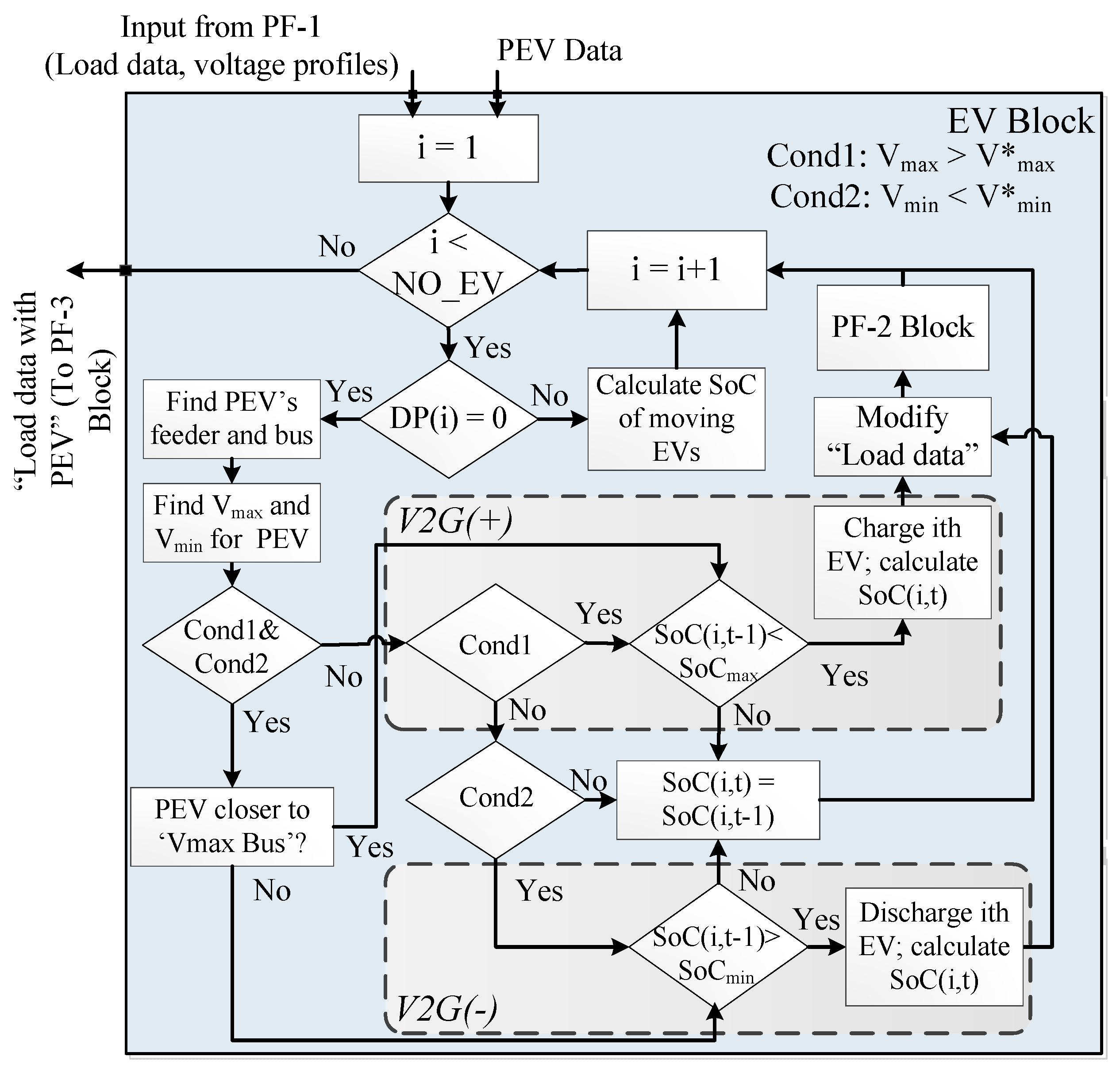
2.4. Plug-in Electric Vehicle Block
2.4.1. Plug-in Electric Vehicle Charging
2.4.2. Vehicle-to-Grid
2.5. Power Flow-3 Block
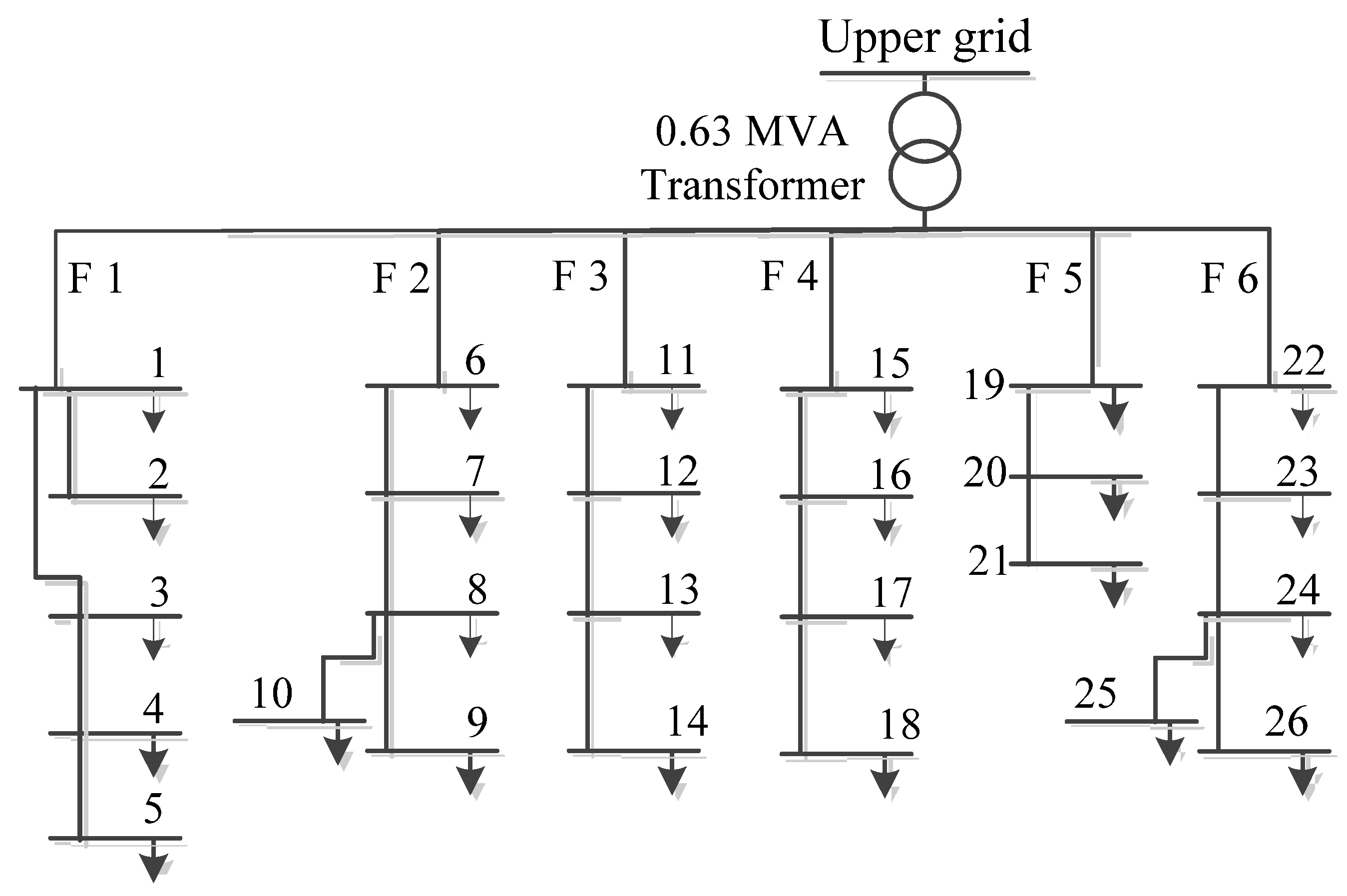
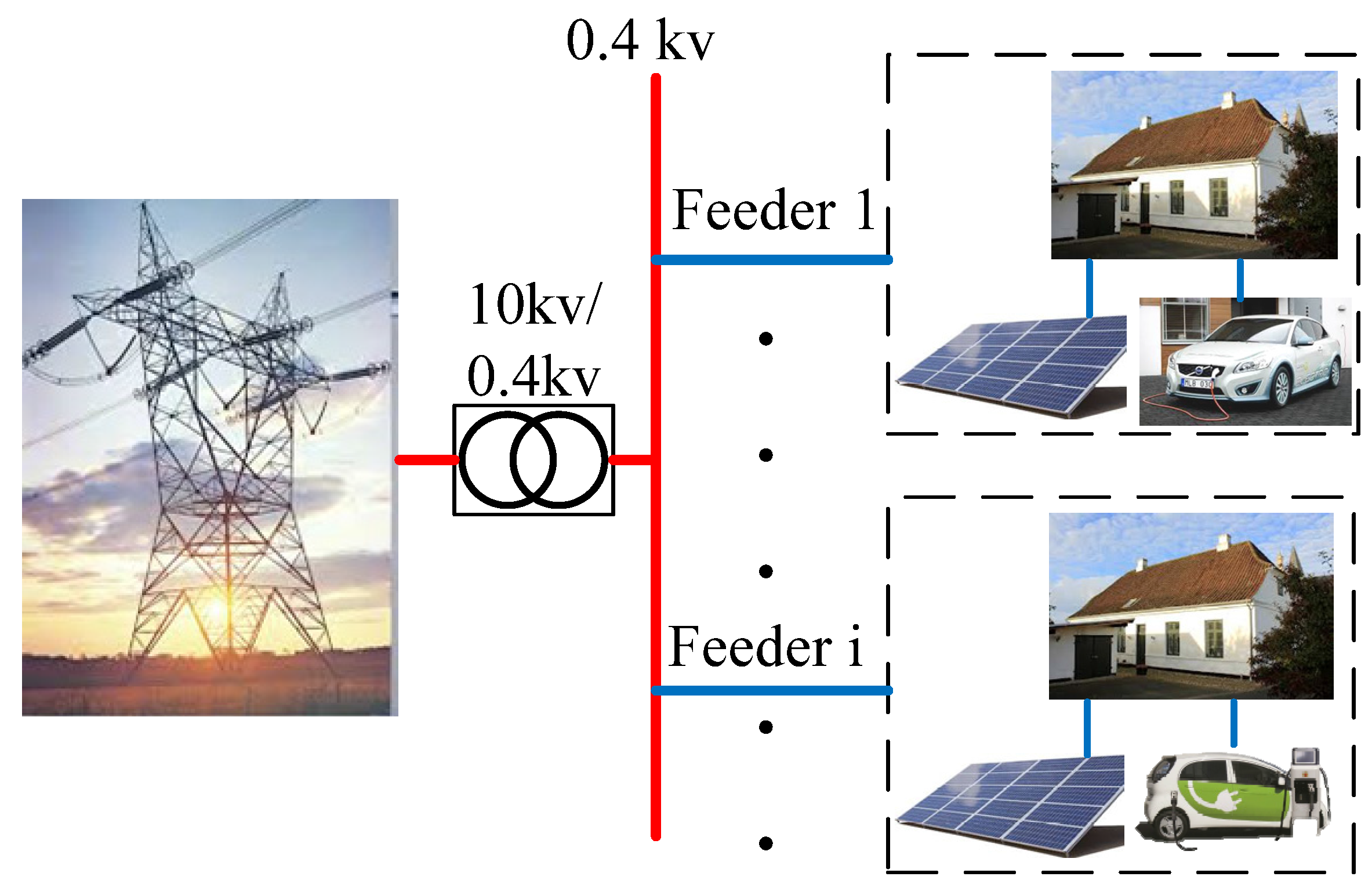
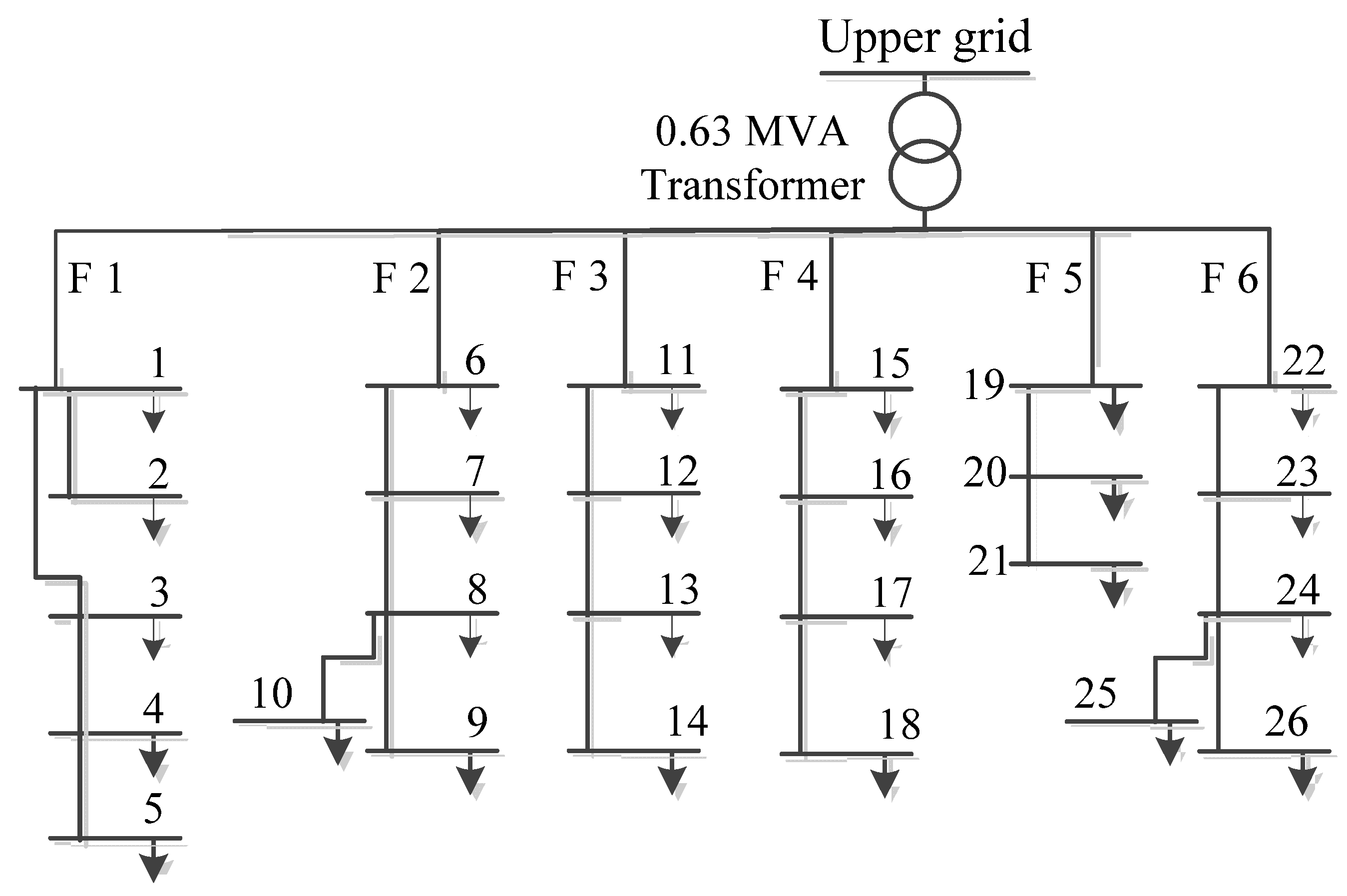
3. Grid Layout and Photovoltaic Modeling

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of households on grid feeders | Feeder | 1 | 2 | 3 | 4 | 5 | 6 |
| No. of household | 20 | 33 | 27 | 28 | 17 | 42 | |
| Details of PEVs | PEV type | % of PEVs | Battery (kWh) | Average consumption (Wh/km) | Charger power (kW) | Daily distance (km) | |
| Commuter | 80 | 30 | 150 | 7.2 | 40 | ||
| Family car | 20 | 30 | 150 | 7.2 | 25 | ||
4. Simulation Results
4.1. Case Studies
4.1.1. CASE I: Original Grid without Photovoltaic and Plug-in Electric Vehicle

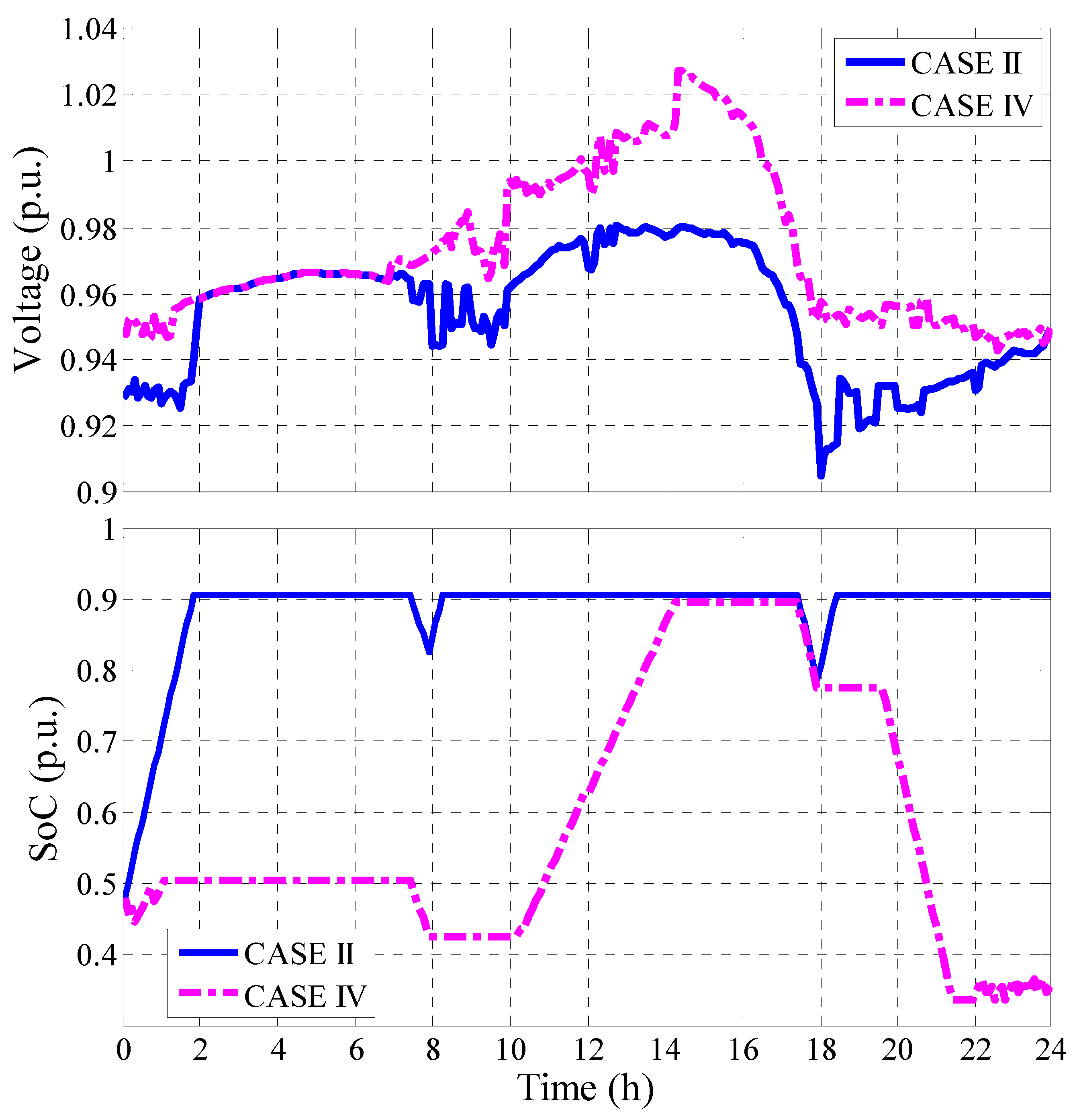
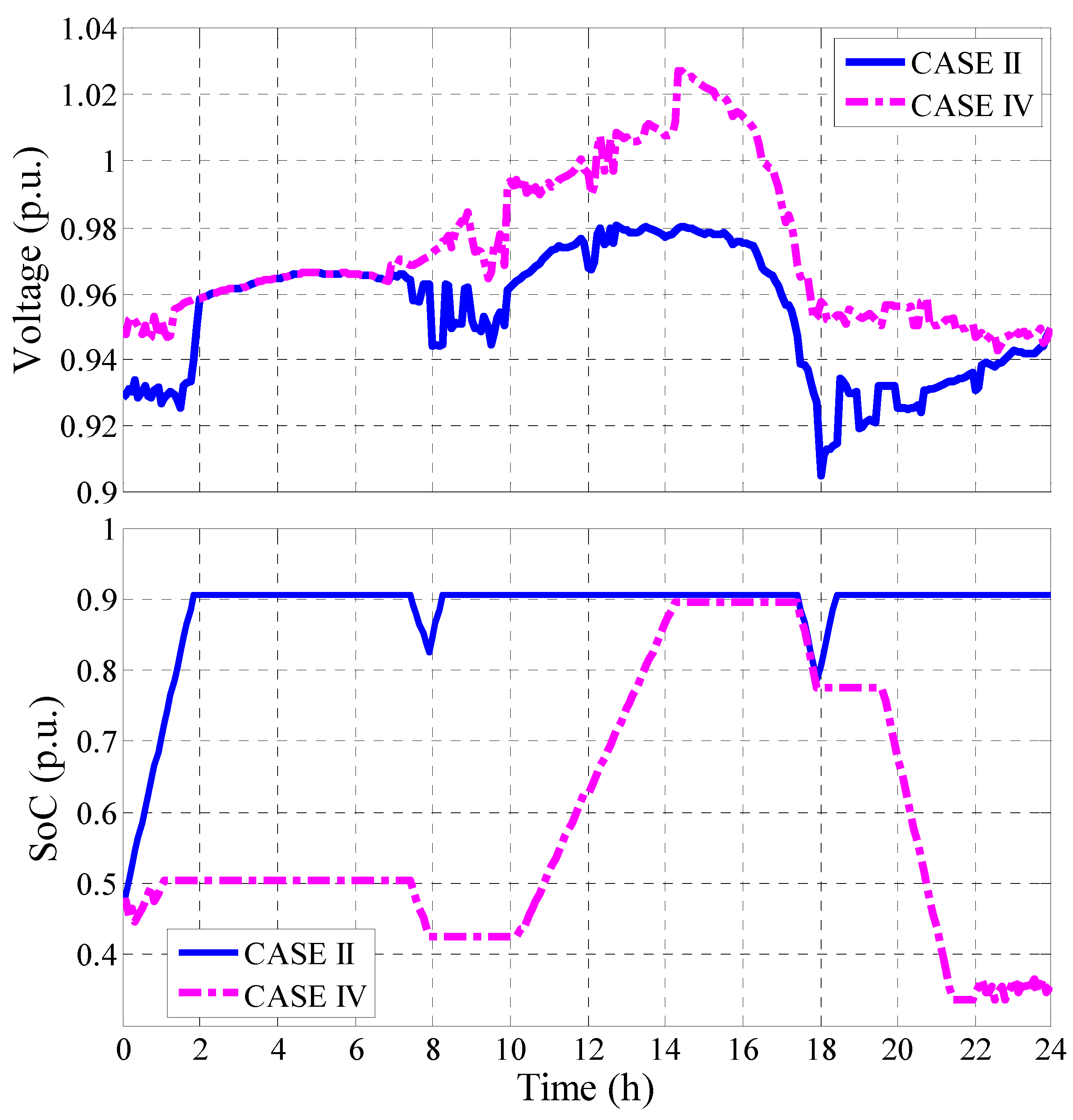
4.1.2. CASE II: Optimization without Grid Support
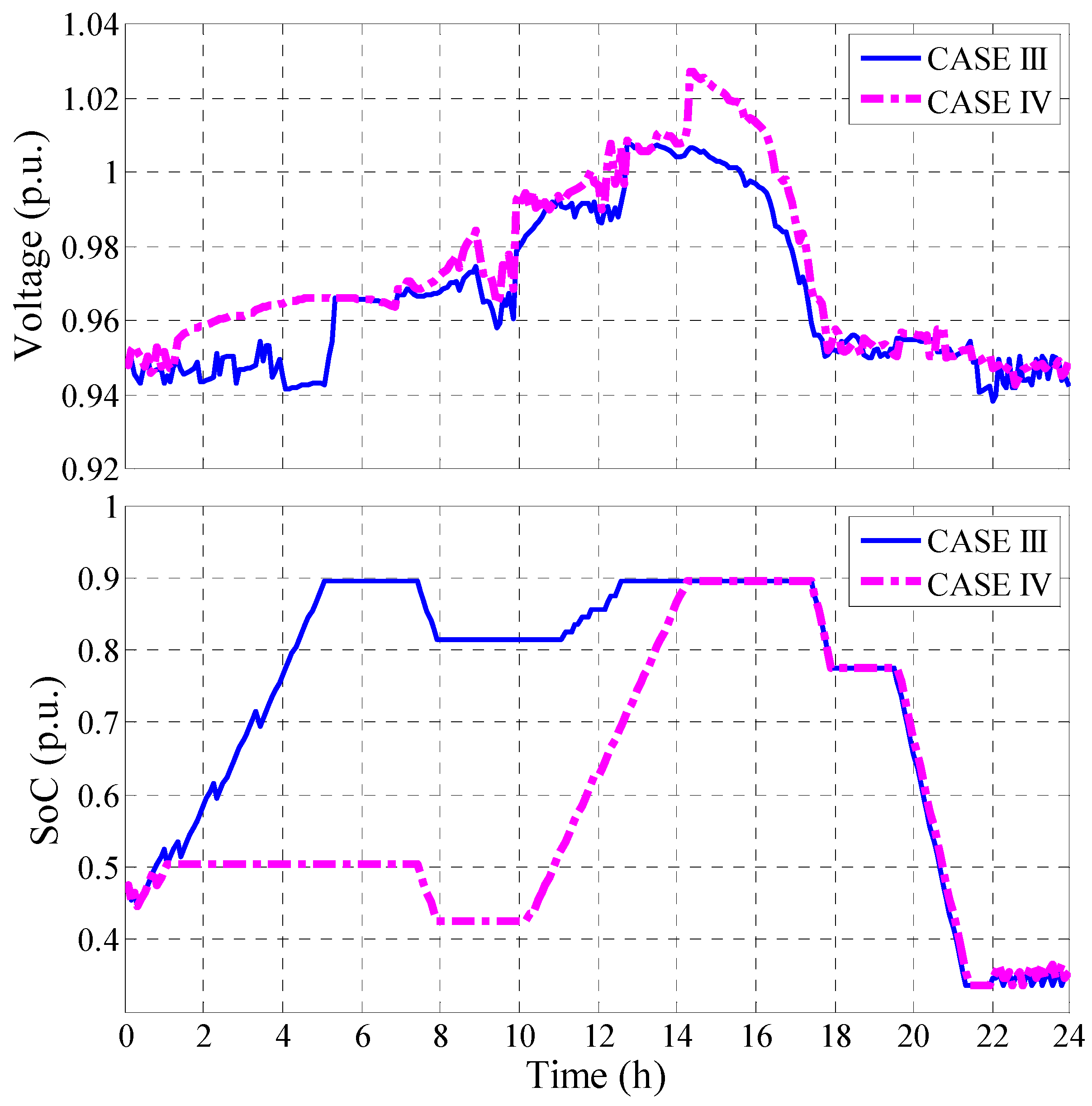
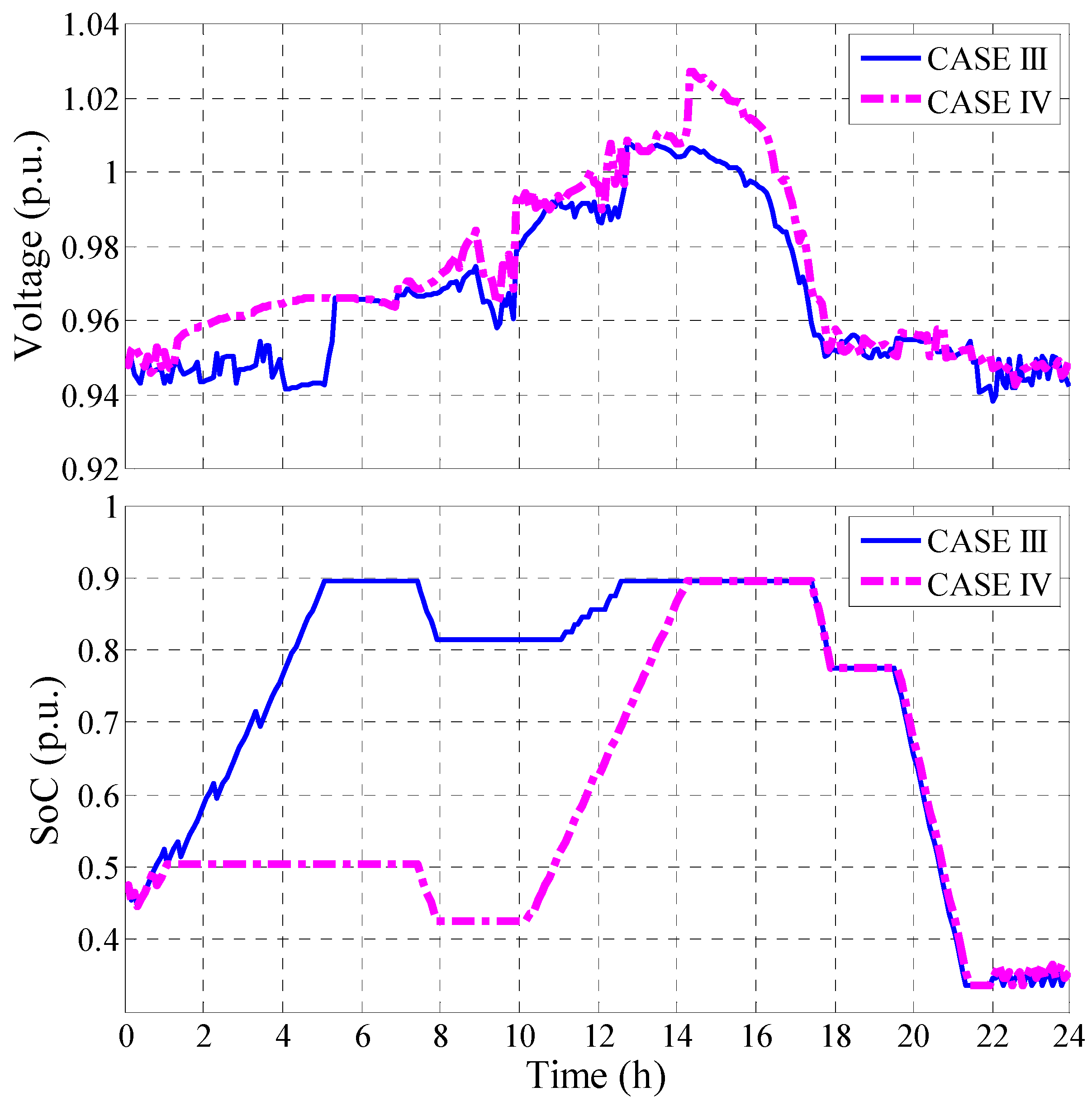
4.1.3. CASE III: Optimization Considering Grid Support
4.1.4. CASE IV: Optimization Considering Grid Support
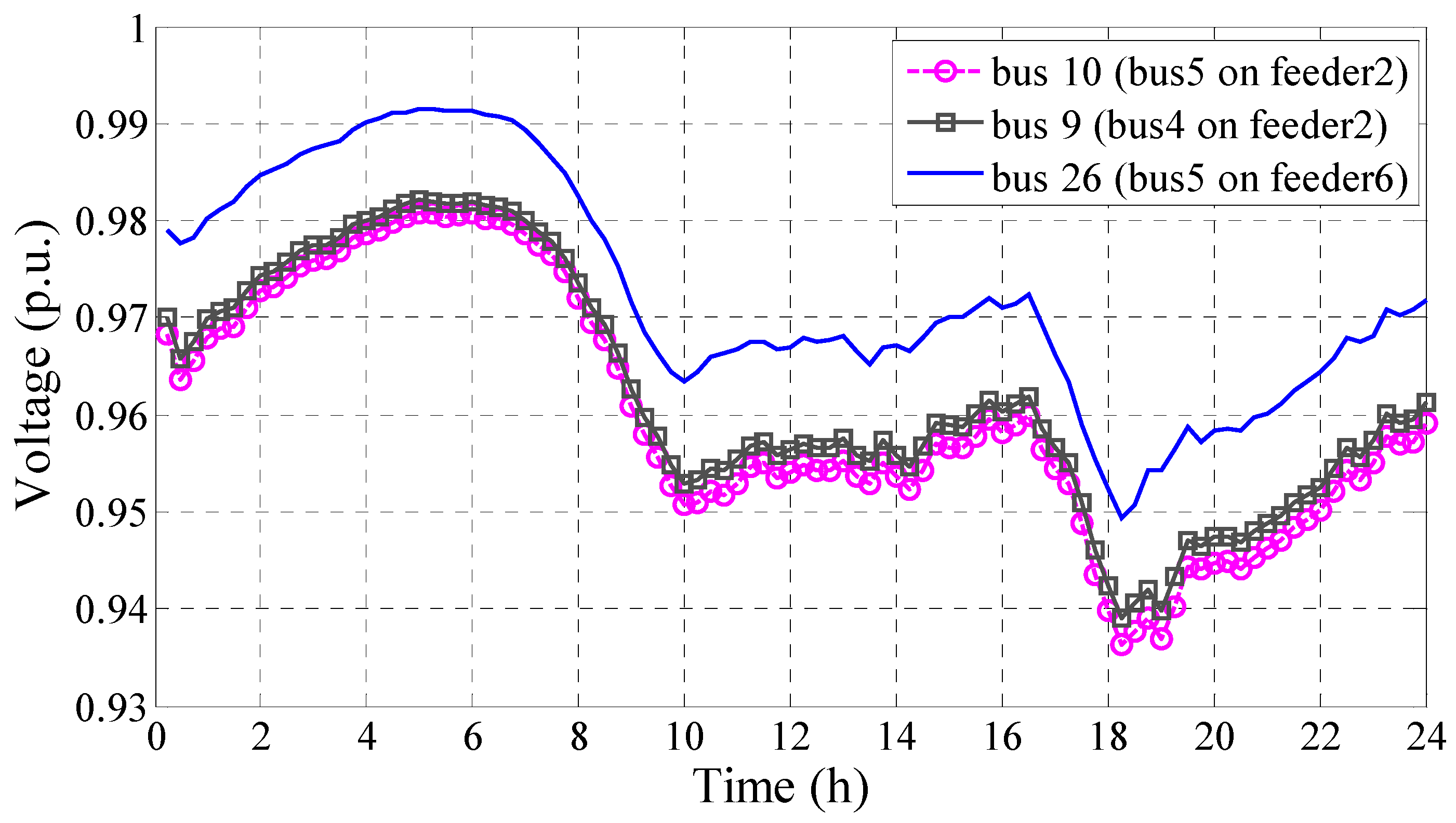
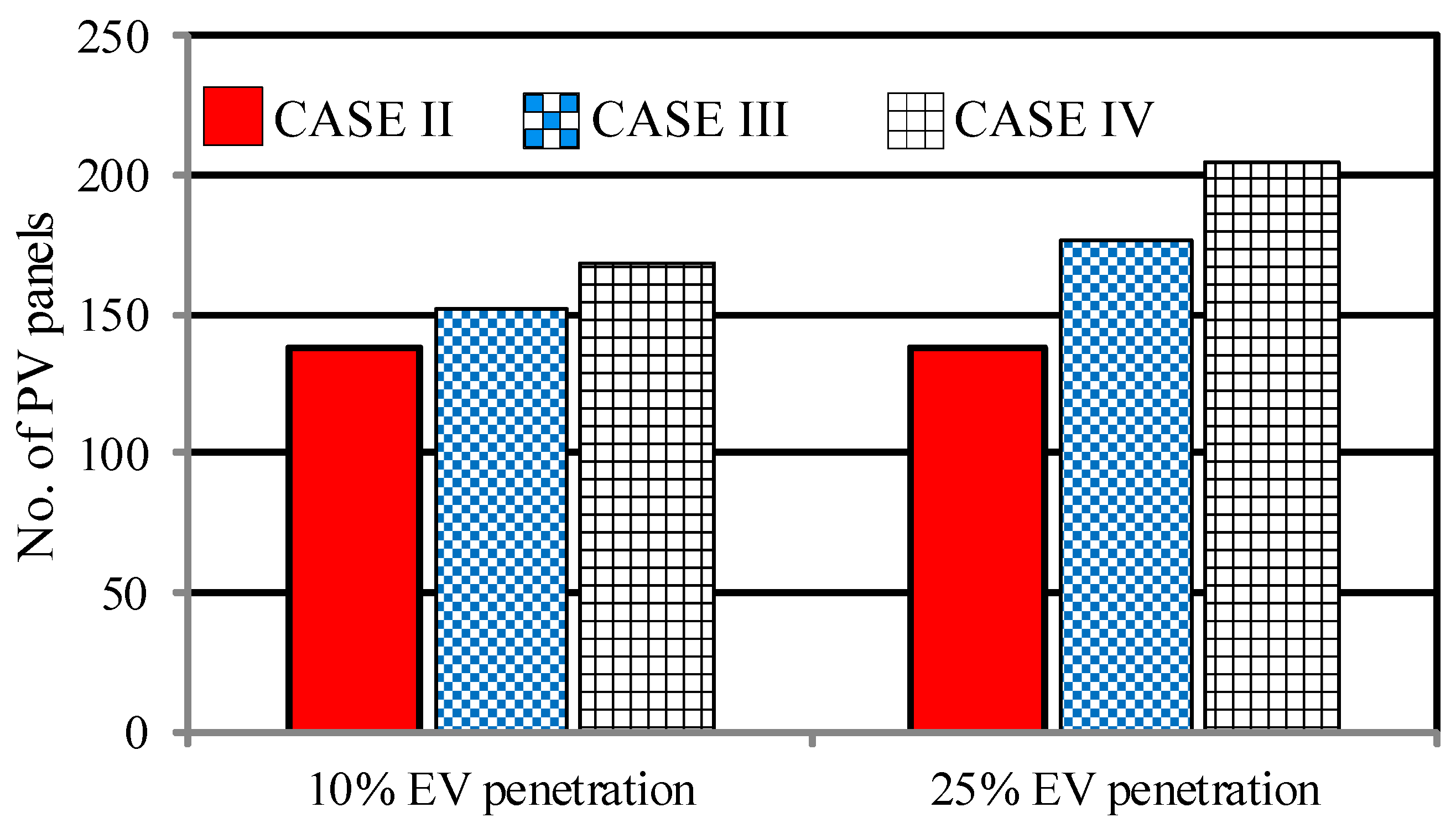
4.2. Optimization Results
| Bus | Case II | Case III | Case IV | |||
|---|---|---|---|---|---|---|
| 10% (16 PEV) | 25% (40 PEV) | 10% | 25% | 10% | 25% | |
| 1 | 2 | 2 | 2 | 3 | 2 | 3 |
| 2 | 6 | 6 | 6 | 7 | 8 | 9 |
| 3 | 1 | 1 | 3 | 4 | 3 | 6 |
| 4 | 4 | 4 | 4 | 5 | 4 | 7 |
| 5 | 3 | 3 | 4 | 4 | 4 | 4 |
| 6 | 6 | 6 | 6 | 6 | 6 | 7 |
| 7 | 9 | 9 | 10 | 12 | 11 | 12 |
| 8 | 2 | 2 | 3 | 5 | 6 | 10 |
| 9 | 4 | 4 | 4 | 6 | 6 | 7 |
| 10 | 1 | 1 | 2 | 4 | 4 | 6 |
| 11 | 3 | 3 | 5 | 8 | 6 | 8 |
| 12 | 10 | 10 | 10 | 10 | 10 | 10 |
| 13 | 4 | 4 | 5 | 6 | 5 | 8 |
| 14 | 2 | 2 | 3 | 5 | 4 | 6 |
| 15 | 6 | 6 | 6 | 6 | 6 | 6 |
| 16 | 8 | 8 | 9 | 10 | 10 | 10 |
| 17 | 8 | 8 | 9 | 9 | 9 | 10 |
| 18 | 8 | 8 | 8 | 8 | 8 | 8 |
| 19 | 10 | 10 | 10 | 10 | 10 | 10 |
| 20 | 8 | 8 | 8 | 8 | 8 | 8 |
| 21 | 8 | 8 | 8 | 8 | 8 | 8 |
| 22 | 5 | 5 | 6 | 8 | 7 | 11 |
| 23 | 6 | 6 | 7 | 8 | 8 | 9 |
| 24 | 8 | 8 | 8 | 8 | 8 | 10 |
| 25 | 5 | 5 | 5 | 6 | 6 | 8 |
| 26 | 1 | 1 | 1 | 3 | 2 | 4 |
| Total | 138 | 138 | 152 | 177 | 169 | 205 |

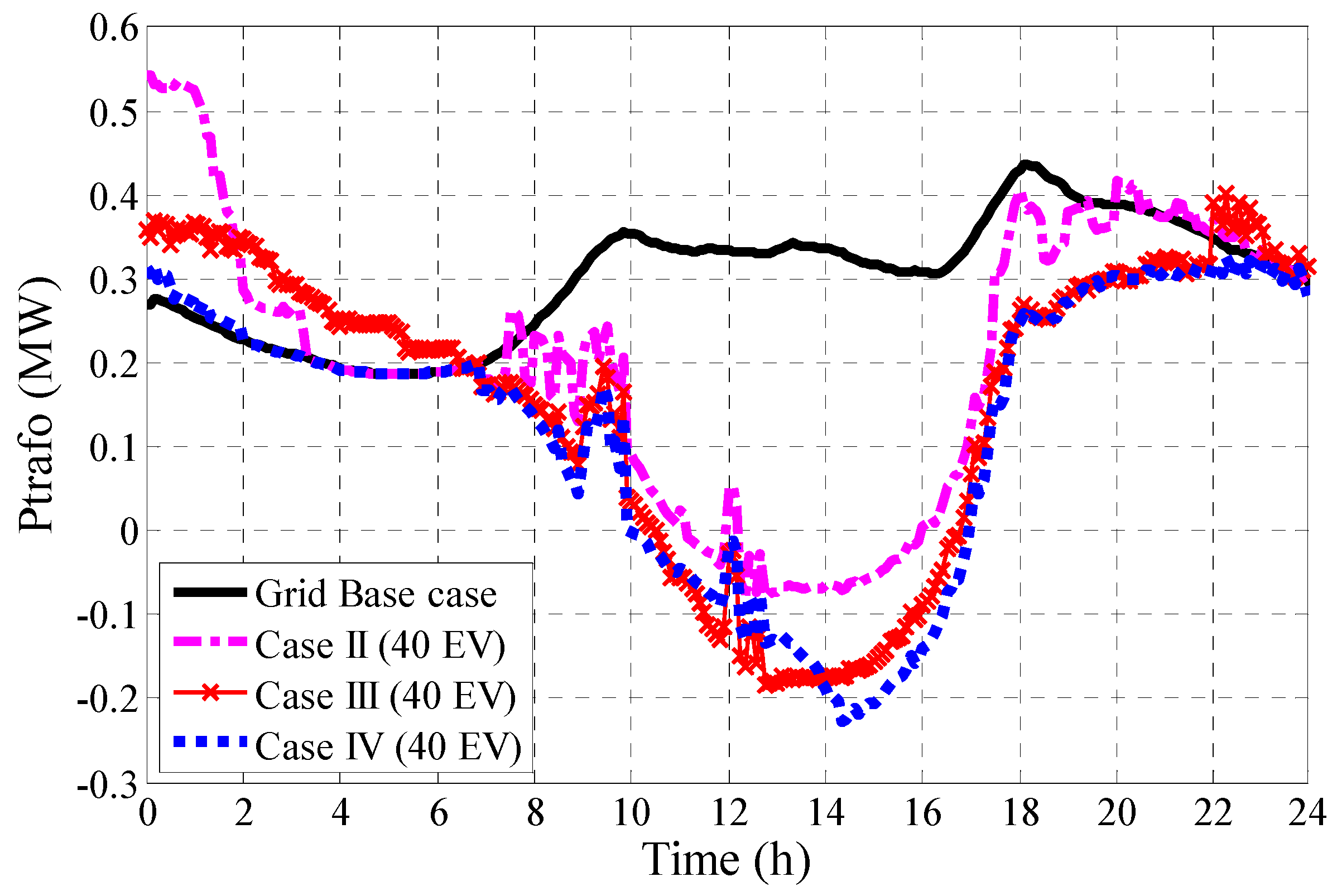
4.3. Analysis of Plug-in Electric Vehicle Impact
5. Conclusions
Author Contributions
Conflicts of Interest
Appendix A
| Parameter | Population | Number of Generation | Stall Generation | Tolerance Function |
|---|---|---|---|---|
| Value | 40 | 200 | 100 | 1 × 10−8 |
| Bus Number | R (Ω/km) | X (Ω/km) | R | X | R (p.u.) | X (p.u.) |
|---|---|---|---|---|---|---|
| Trafo →1 (feeder 1) | 0.2080 | 0.086 | 0.0859 | 0.0355 | 53,703 | 22,204 |
| 1 to 2 | 0.6420 | 0.0870 | 0.0399 | 0.0054 | 24,958 | 3382 |
| 1 to 3 | 0.6420 | 0.0870 | 0.0658 | 0.0089 | 41,128 | 5573 |
| 3 to 4 | 0.6420 | 0.0870 | 0.0642 | 0.0087 | 40.125 | 5438 |
| 4 to 5 | 0.3210 | 0.0860 | 0.0551 | 0.0148 | 34,467 | 9234 |
| Trafo →6 (feeder 2) | 0.2080 | 0.0840 | 0.0539 | 0.0217 | 33,657 | 13,592 |
| 6 to 7 | 0.2080 | 0.0840 | 0.0186 | 0.0075 | 11,609 | 4688 |
| 7 to 8 | 0.2080 | 0.0840 | 0.0448 | 0.0181 | 28,028 | 11,319 |
| 8 to 9 | 0.3210 | 0.0840 | 0.0544 | 0.0142 | 34,006 | 8899 |
| 9 to 10 | 0.3210 | 0.0840 | 0.0258 | 0.0068 | 16,130 | 4221 |
| Trafo →11 (feeder 3) | 0.2080 | 0.0840 | 0.0347 | 0.0140 | 21,671 | 8752 |
| 11 to 12 | 0.2080 | 0.0840 | 0.0233 | 0.0094 | 14,560 | 5880 |
| 12 to 13 | 0.3210 | 0.0840 | 0.0261 | 0.0068 | 16,331 | 4274 |
| 13 to 14 | 0.3210 | 0.0840 | 0.0546 | 0.0143 | 34,106 | 8925 |
| Trafo →15 (feeder 4) | 0.2080 | 0.0840 | 0.0613 | 0.0247 | 38,285 | 15,461 |
| 15 to 16 | 0.2080 | 0.0840 | 0.0223 | 0.0090 | 13,949 | 5633 |
| 16 to 17 | 0.2080 | 0.0840 | 0.0267 | 0.0108 | 16,718 | 6752 |
| 17 to 18 | 0.2080 | 0.0840 | 0.0132 | 0.0053 | 8268 | 3339 |
| Trafo →19 (feeder 5) | 0.2080 | 0.0860 | 0.0908 | 0.0376 | 56,771 | 23,473 |
| 19 to 20 | 0.3210 | 0.0840 | 0.0414 | 0.0108 | 25,901 | 6778 |
| 20 to 21 | 0.6420 | 0.0870 | 0.0545 | 0.0074 | 34,066 | 4616 |
| Trafo →22 (feeder 6) | 0.2080 | 0.0840 | 0.0590 | 0.0238 | 36,855 | 14,884 |
| 22 to 23 | 0.2080 | 0.0840 | 0.0146 | 0.0059 | 9100 | 3675 |
| 23 to 24 | 0.3890 | 0.0830 | 0.0204 | 0.0044 | 12,764 | 2723 |
| 24 to 25 | 0.3890 | 0.0830 | 0.0311 | 0.0066 | 19,450 | 4150 |
| 24 to 26 | 0.5260 | 0.0830 | 0.0395 | 0.0062 | 24,656 | 3891 |
References
- Guide for Smart Grid Interoperability of Energy Technology Operation with Electric Power System (EPS), and End-Use Applications and Loads; IEEE P2030; IEEE Standards Association: Piscataway, NJ, USA, 2011.
- CEN-CENELEC-ETSI Smart Grid Coordination Group-Sustainable Processes; European Committee for Electrotechnical Standardization-European Telecommunications Standards Institute (CENELEC-ETSI): Brussels, Belgium, 2012.
- Shafiullah, G.M.; Oo, A.M.T.; Jarvis, D.; Ali, A.B.M.S.; Wolfs, P. Potential Challenges: Integrating Renewable Energy with the Smart Grid. In Proceedings of the 20th Australasian Universities Power Engineering Conference, Christchurch, New Zealand, 5–8 December 2010; pp. 1–6.
- Omran, W.A.; Kazerani, M.; Salama, M.M.A. Investigation of Methods for Reduction of Power Fluctuations Generated from Large Grid-Connected Photovoltaic Systems. IEEE Trans. Energy Convers. 2011, 26, 318–327. [Google Scholar] [CrossRef]
- Ueda, Y.; Kurokawa, K.; Tanabe, T.; Kitamura, K.; Sugihara, H. Analysis Results of Output Power Loss Due to the Grid Voltage Rise in Grid-Connected Photovoltaic Power Generation Systems. IEEE Trans. Ind. Electron. 2008, 55, 2744–2751. [Google Scholar] [CrossRef]
- Tonkoski, R.; Turcotte, D.; EL-Fouly, T.H.M. Impact of High PV Penetration on Voltage Profiles in Residential Neighborhoods. IEEE Trans. Sustain. Energy 2012, 3, 518–527. [Google Scholar] [CrossRef]
- Hung, D.Q.; Mithulananthan, N. Multiple Distributed Generator Placement in Primary Distribution Networks for Loss Reduction. IEEE Trans. Ind. Electron. 2013, 60, 1700–1708. [Google Scholar] [CrossRef]
- Al-Sabounchi, A.; Gow, J.; Al-Akaidi, M. Simple Procedure for Optimal Sizing and Location of a Single Photovoltaic Generator on Radial Distribution Feeder. IET Renew. Power Gener. 2014, 8, 160–170. [Google Scholar] [CrossRef]
- Lin, C.H.; Hsieh, W.L.; Chen, C.S.; Hsu, C.T.; Ku, T.T. Optimization of Photovoltaic Penetration in Distribution Systems Considering Annual Duration Curve of Solar Irradiation. IEEE Trans. Power Syst. 2012, 27, 1090–1097. [Google Scholar] [CrossRef]
- Shaaban, M.F.; Atwa, Y.M.; El-Saadany, E.F. DG Allocation for Benefit Maximization in Distribution Networks. IEEE Trans. Power Syst. 2013, 28, 639–649. [Google Scholar] [CrossRef]
- Alsokhiry, F.; Lo, K.L. Distributed Generation Based on Renewable Energy Ancillary Services. In Proceedings of the 2013 Fourth International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 1200–1205.
- Kempton, W.; Tomić, J. Vehicle-to-Grid Power Implementation: From Stabilizing the Grid to Supporting Large-Scale Renewable Energy. J. Power Sources 2005, 144, 280–294. [Google Scholar] [CrossRef]
- Sortomme, E.; El-Sharkawi, M.A. Optimal Charging Strategies for Unidirectional Vehicle-to-Grid. IEEE Trans. Smart Grid 2011, 2, 131–138. [Google Scholar] [CrossRef]
- Hong, Y.-Y.; Lai, Y.-M.; Chang, Y.-R.; Lee, Y.-D.; Liu, P.-W. Optimizing Capacities of Distributed Generation and Energy Storage in a Small Autonomous Power System Considering Uncertainty in Renewables. Energies 2015, 8, 2473–2492. [Google Scholar] [CrossRef]
- Gao, S.; Chau, K.T.; Liu, C.; Wu, D.; Chan, C.C. Integrated Energy Management of Plug-in Electric Vehicles in Power Grid with Renewables. IEEE Trans. Veh. Technol. 2014, 63, 3019–3027. [Google Scholar] [CrossRef]
- Escudero-Garzas, J.J.; Garcia-Armada, A.; Seco-Granados, G. Fair Design of Plug-in Electric Vehicles Aggregator for V2G Regulation. IEEE Trans. Veh. Technol. 2012, 61, 3406–3419. [Google Scholar] [CrossRef]
- Rottondi, C.; Fontana, S.; Verticale, G. Enabling Privacy in Vehicle-to-Grid Interactions for Battery Recharging. Energies 2014, 7, 2780–2798. [Google Scholar] [CrossRef]
- Diaz, N.L.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Intelligent Distributed Generation and Storage Units for DC Microgrids—A New Concept on Cooperative Control Without Communications Beyond Droop Control. IEEE Trans. Smart Grid 2014, 5, 2476–2485. [Google Scholar] [CrossRef]
- Wu, D.; Tang, F.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. A Control Architecture to Coordinate Renewable Energy Sources and Energy Storage Systems in Islanded Microgrids. IEEE Trans. Smart Grid 2015, 6, 1156–1166. [Google Scholar] [CrossRef]
- Latvakoski, J.; Mäki, K.; Ronkainen, J.; Julku, J.; Koivusaari, J. Simulation-Based Approach for Studying the Balancing of Local Smart Grids with Electric Vehicle Batteries. Systems 2015, 3, 81–108. [Google Scholar] [CrossRef]
- Marler, R.T.; Arora, J.S. Survey of Multi-Objective Optimization Methods for Engineering. Struct. Multidiscip. Optim. 2004, 26, 369–395. [Google Scholar] [CrossRef]
- Kordkheili, R.A.; Pourmousavi, S.A.; Pillai, J.R.; Hasanien, H.M.; Bak-Jensen, B.; Nehrir, M.H. Optimal Sizing and Allocation of Residential Photovoltaic Panels in a Distribution Network for Ancillary Services Application. In Proceedings of the 2014 International Conference on Optimization of Electrical and Electronic Equipment, Bran, Romania, 22–24 May 2014; pp. 681–687.
- Liang, H.; Zhuang, W. Stochastic Modeling and Optimization in a Microgrid: A Survey. Energies 2014, 7, 2027–2050. [Google Scholar] [CrossRef]
- Technical Regulation 3.2.1 for Electricity Generation Facilities with a Rated Current of 16 A per Phase or Lower; Energinet.dk: Fredericia, Denmark, 2011.
- Saadat, H. Power System Analysis, 2nd ed.; Mc-Graw Hill: New York, NY, USA, 2002. [Google Scholar]
- Pillai, J.R.; Huang, S.; Bak-Jensen, B.; Mahat, P.; Thogersen, P.; Moller, J. Integration of Solar Photovoltaics and Electric Vehicles in Residential Grids. In Proceedings of the 2013 IEEE Power and Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013.
- Thompson, M.; Infield, D.G. Impact of Widespread Photovoltaics Generation on Distribution Systems. IET Renew. Power Gener. 2007, 1, 33–40. [Google Scholar] [CrossRef]
- Neimane, V. On Development Planning of Electricity Distribution Networks. Ph.D. Thesis, Kungliga Tekniska högskolan (KTH), Stockholm, Sweden, 2001. [Google Scholar]
- Kordkheili, R.A.; Bak-Jensen, B.; Pillai, J.R.; Mahat, P. Determining Maximum Photovoltaic Penetration in a Distribution grid Considering Grid Operation Limits. In Proceedings of the 2014 IEEE PES General Meeting/Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5.
- Alimisis, V.; Hatziargyriou, N.D. Evaluation of a Hybrid Power Plant Comprising Used EV-Batteries to Complement Wind Power. IEEE Trans. Sustain. Energy 2013, 4, 286–293. [Google Scholar] [CrossRef]
- Affanni, A.; Bellini, A.; Franceschini, G.; Guglielmi, P.; Tassoni, C. Battery Choice and Management for New-Generation Electric Vehicles. IEEE Trans. Ind. Electron. 2005, 52, 1343–1349. [Google Scholar] [CrossRef]
- Sundstrom, O.; Binding, C. Flexible Charging Optimization for Electric Vehicles Considering Distribution Grid Constraints. IEEE Trans. Smart Grid 2012, 3, 26–37. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmadi Kordkheili, R.; Pourmousavi, S.A.; Savaghebi, M.; Guerrero, J.M.; Nehrir, M.H. Assessing the Potential of Plug-in Electric Vehicles in Active Distribution Networks. Energies 2016, 9, 34. https://doi.org/10.3390/en9010034
Ahmadi Kordkheili R, Pourmousavi SA, Savaghebi M, Guerrero JM, Nehrir MH. Assessing the Potential of Plug-in Electric Vehicles in Active Distribution Networks. Energies. 2016; 9(1):34. https://doi.org/10.3390/en9010034
Chicago/Turabian StyleAhmadi Kordkheili, Reza, Seyyed Ali Pourmousavi, Mehdi Savaghebi, Josep M. Guerrero, and Mohammad Hashem Nehrir. 2016. "Assessing the Potential of Plug-in Electric Vehicles in Active Distribution Networks" Energies 9, no. 1: 34. https://doi.org/10.3390/en9010034
APA StyleAhmadi Kordkheili, R., Pourmousavi, S. A., Savaghebi, M., Guerrero, J. M., & Nehrir, M. H. (2016). Assessing the Potential of Plug-in Electric Vehicles in Active Distribution Networks. Energies, 9(1), 34. https://doi.org/10.3390/en9010034