


Efficient Online Inductance Tracking Algorithm for IPMSM Using Torque Estimation

Abstract
1. Introduction
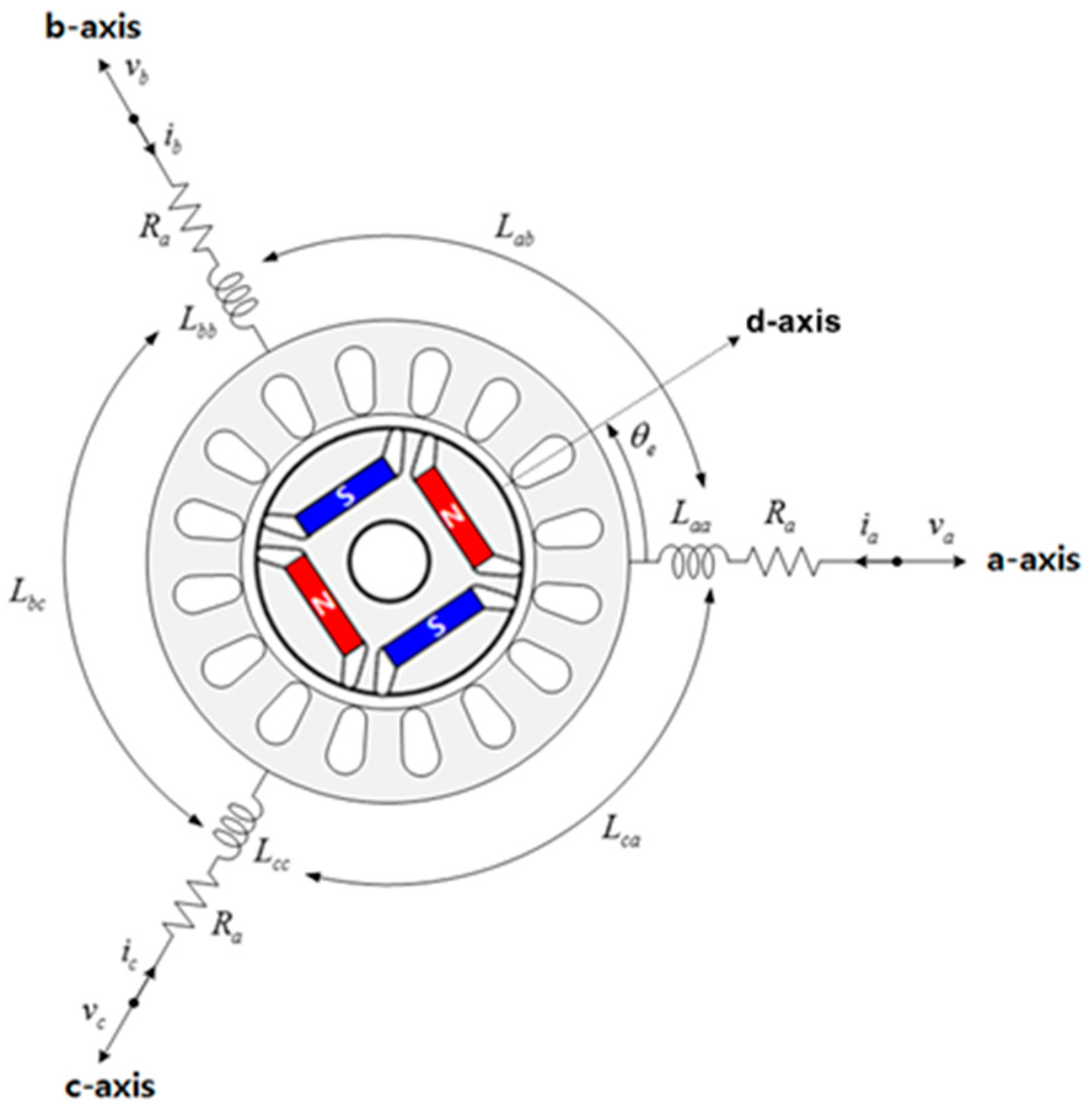
2. IPMSM Mathematic Model
2.1. IPMSM d-q Axis Voltage Equation
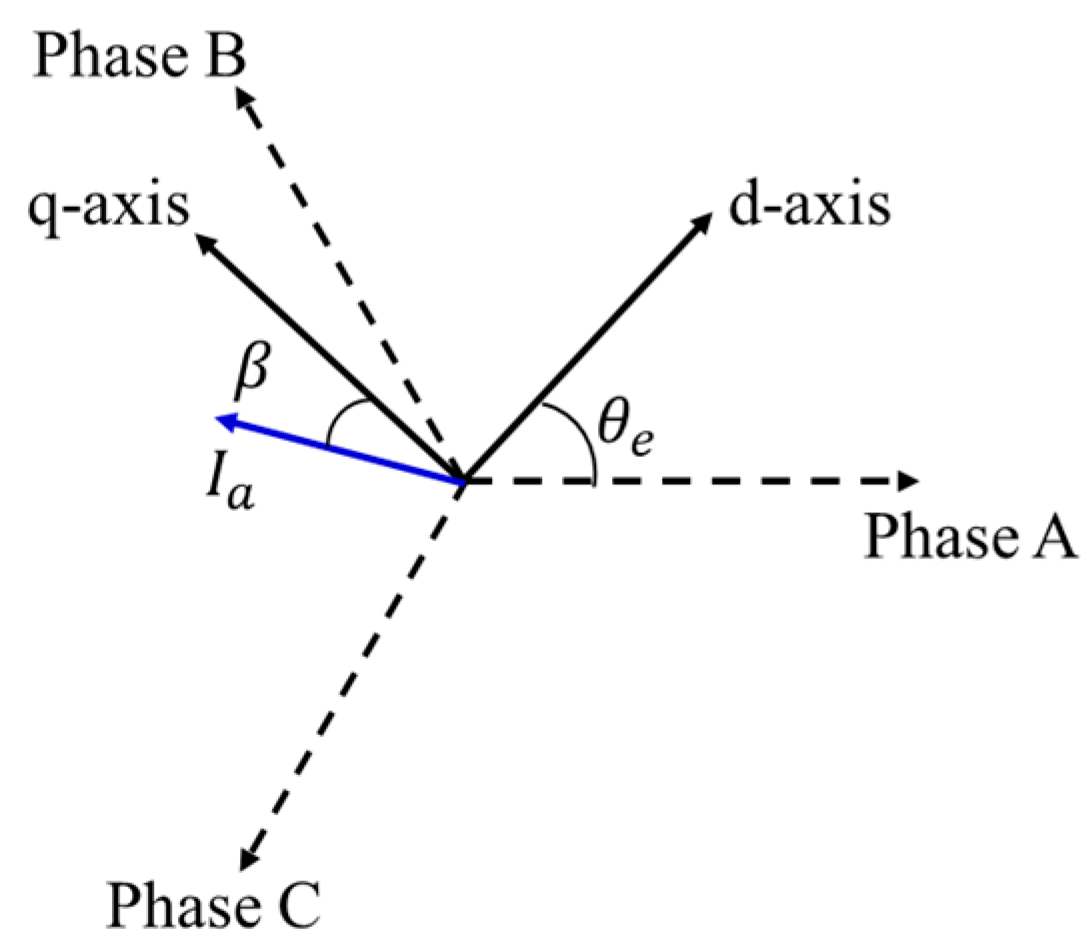
2.2. d-q Axis Current for Maximum Torque per Ampere (MTPA) Control
3. Electrical Torque Estimator
4. Online Parameter Tracking Methods
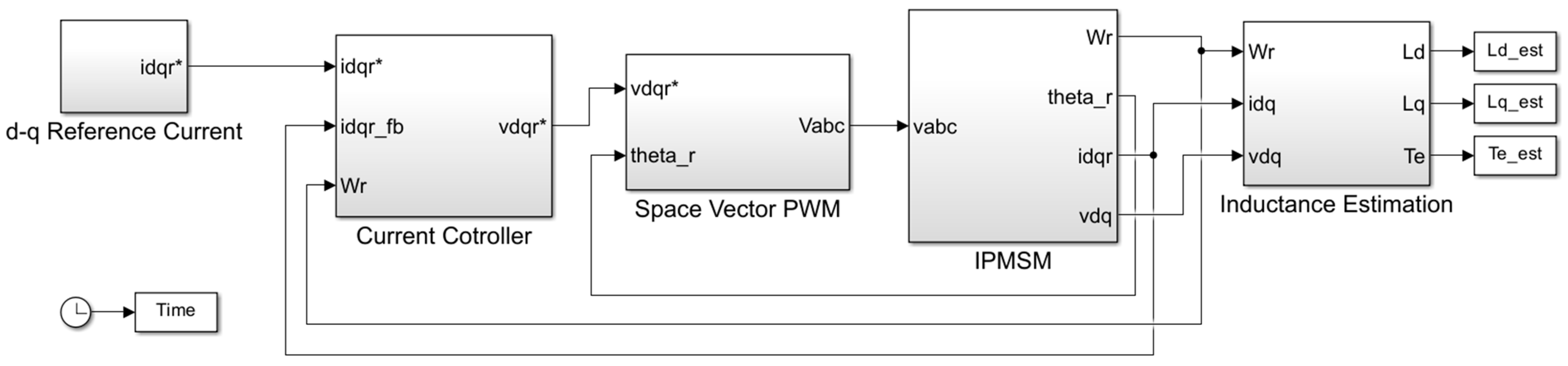
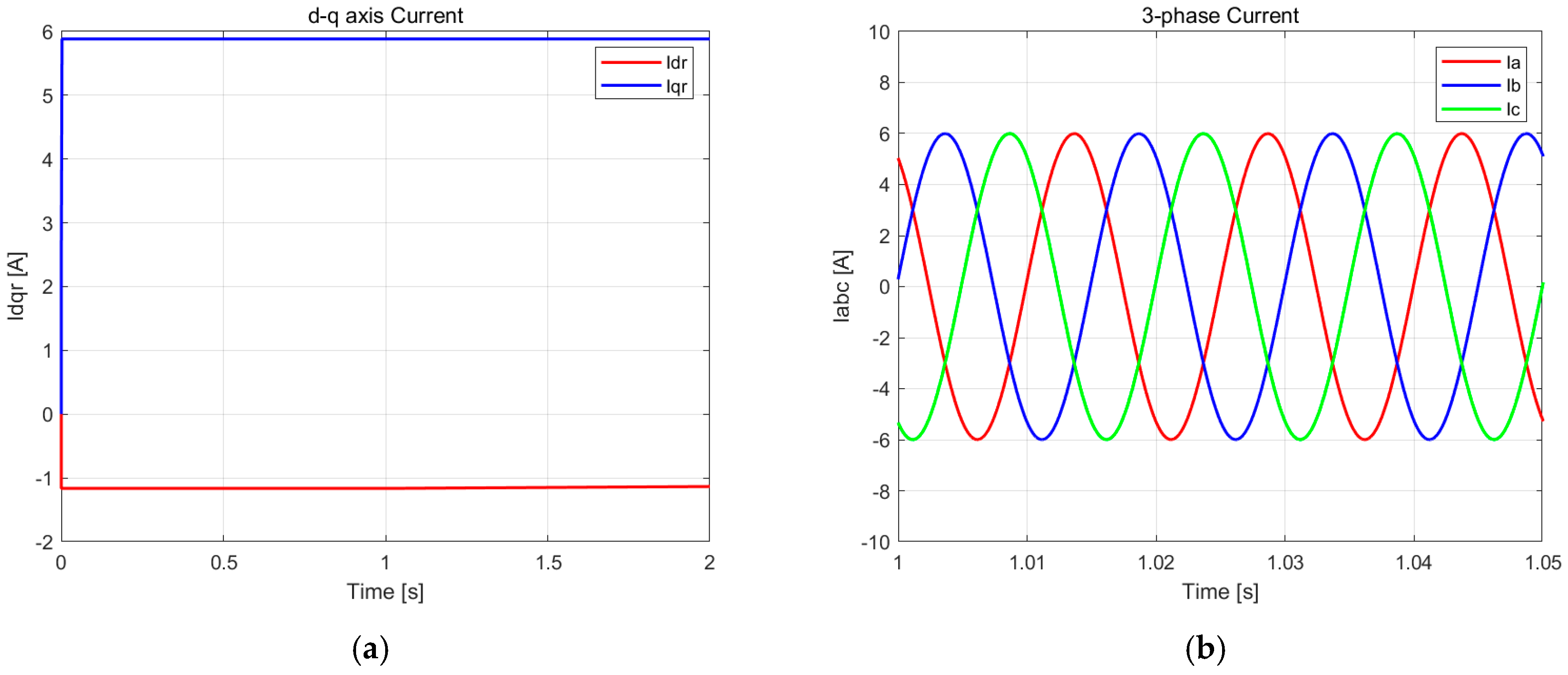
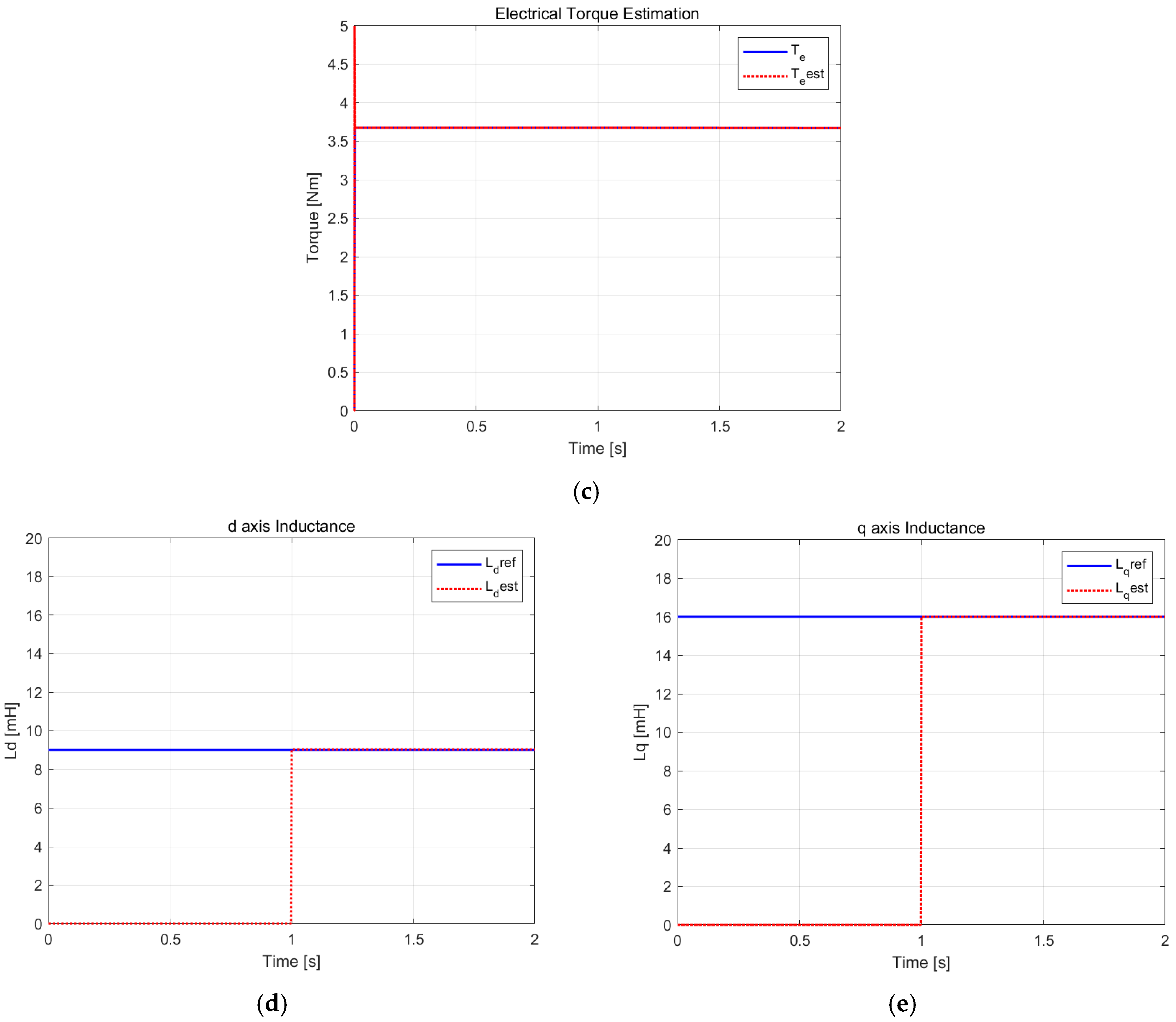
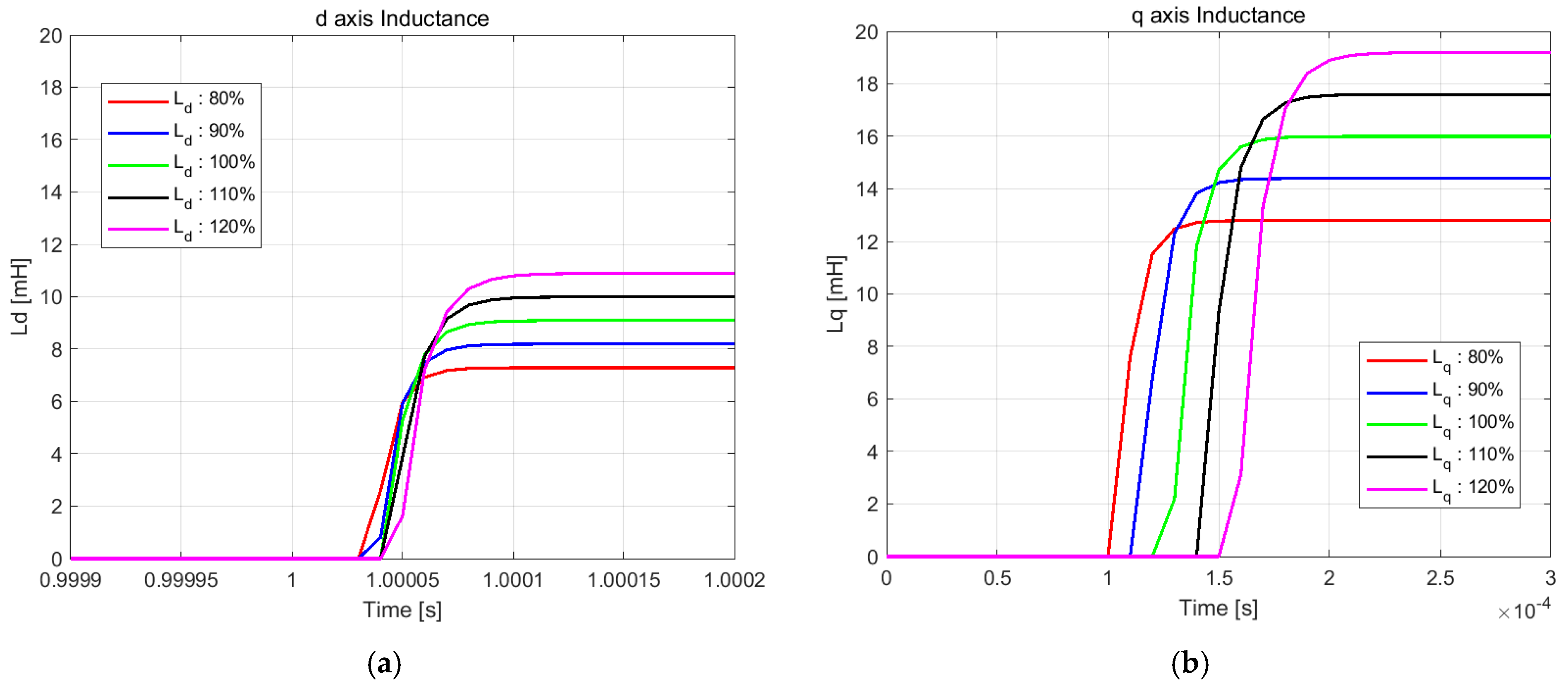
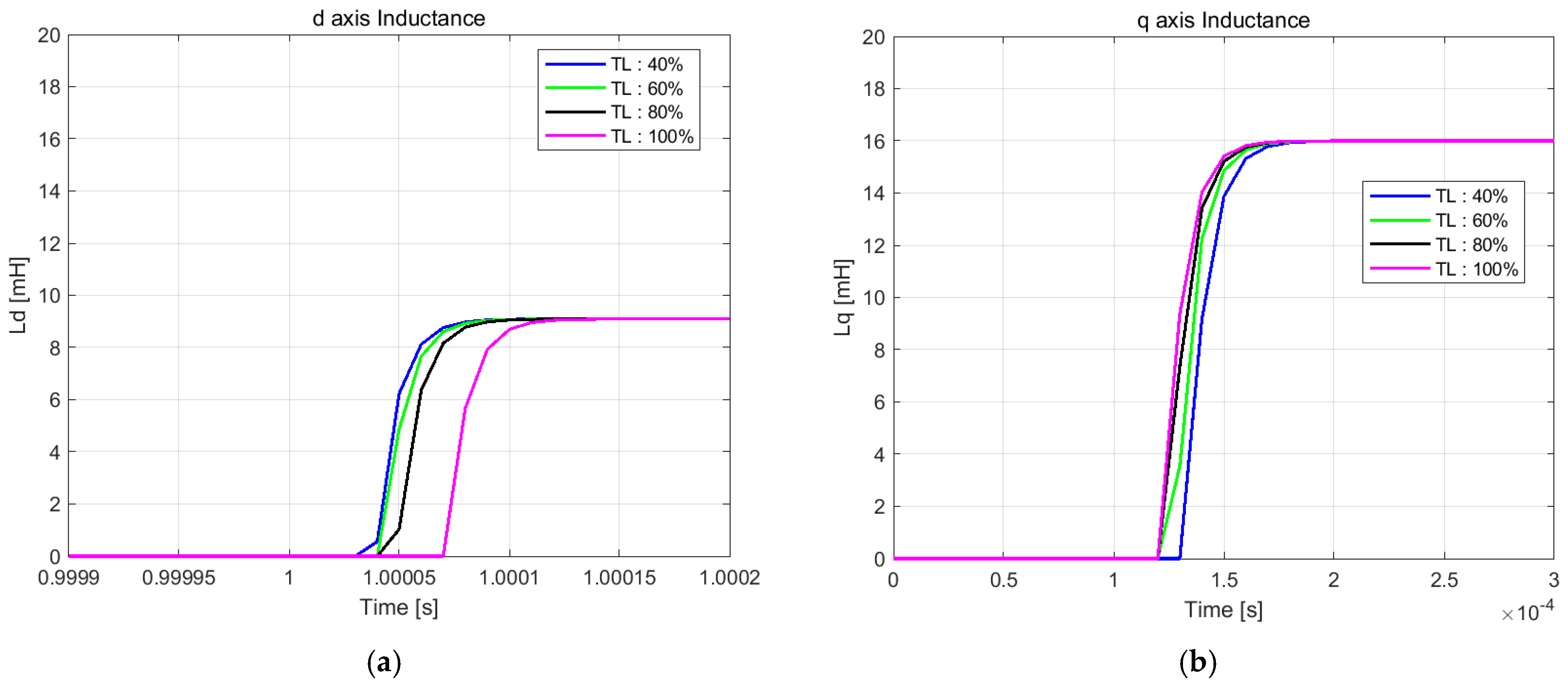
5. Simulation Results
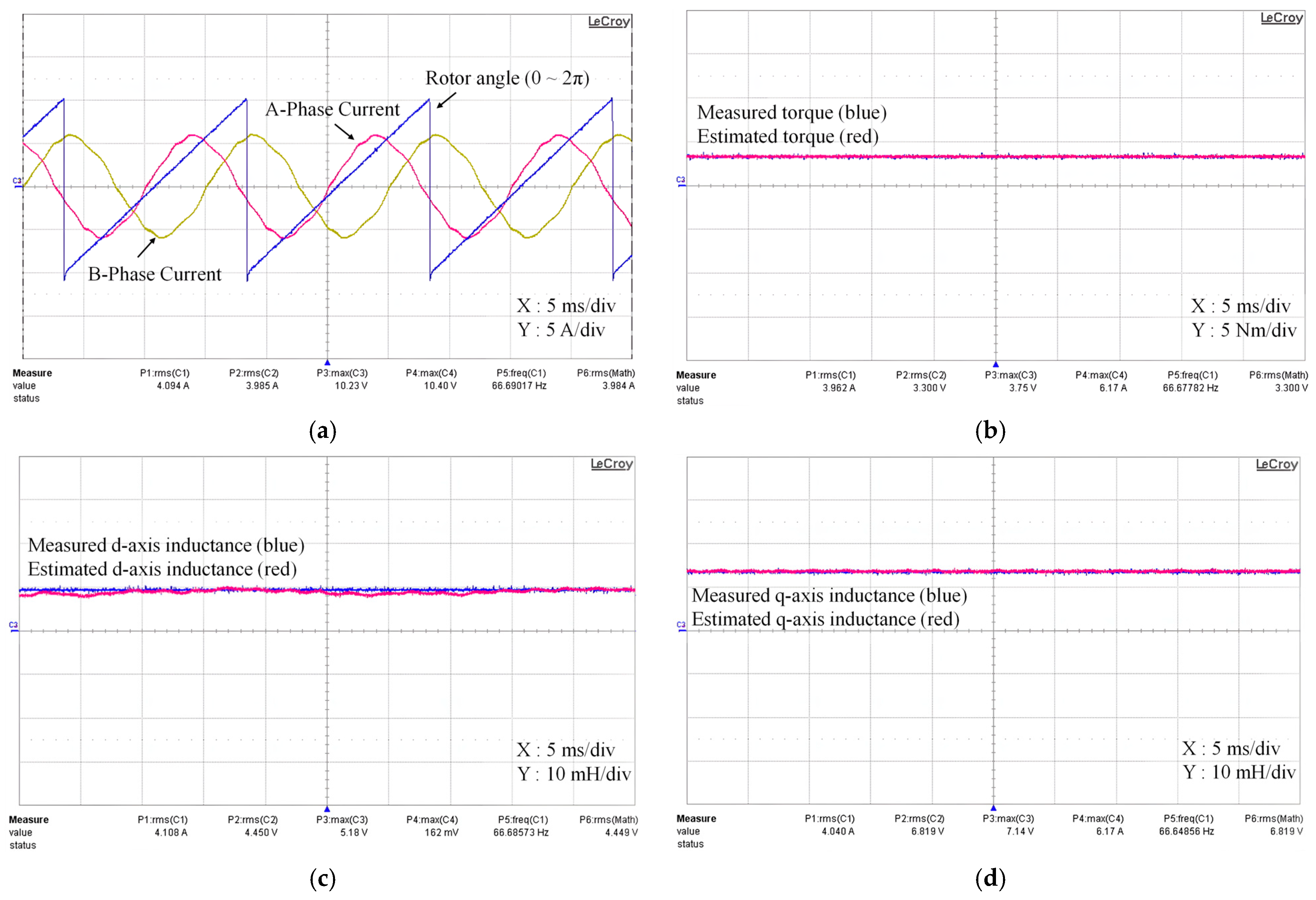
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the performances and parameters of interior PMSM used for electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Lee, K.D.; Lee, J.; Lee, H.W. Inductance Calculation of Flux Concentrating Permanent Magnet Motor Through Nonlinear Magnetic Equivalent Circuit. IEEE Trans. Magn. 2015, 51, 529–551. [Google Scholar] [CrossRef]
- Meessen, M.J.; Thelin, P.; Soulard, J.; Lomonova, E.A. Inductance Calculations of Permanent-Magnet Synchronous Machines Including Flux Change and Self- and Cross-Saturations. IEEE Trans. Magn. 2008, 44, 2324–2331. [Google Scholar] [CrossRef]
- Rahman, K.M.; Hiti, S. Identification of Machine Parameters of a Synchronous Motor. IEEE Trans. Ind. Appl. 2005, 41, 557–565. [Google Scholar] [CrossRef]
- Kim, H.S.; Sul, S.K. Real-Time Torque Control of IPMSM Under Flux Variations. IEEE J. Emerg. Sel. Topics Power Electron. 2022, 10, 3345–3356. [Google Scholar] [CrossRef]
- Erturk, F.; Akin, B. Spatial inductance estimation for current loop auto-tuning in IPMSM self-commissioning. IEEE Trans. Ind. Electron. 2020, 67, 3911–3920. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, J.; Jin, M. Adaptive finite-control-set model predictive current control for IPMSM drives with inductance variation. IET Electr. Power Appl. 2017, 11, 874–884. [Google Scholar] [CrossRef]
- Morimoto, S.; Sanada, M.; Takeda, Y. Mechanical Sensorless Drives of IPMSM with Online Parameter Identification. IEEE Trans. Ind. Appl. 2006, 42, 1241–1248. [Google Scholar] [CrossRef]
- Ahn, H.; Park, H.; Kim, C.; Lee, H. A Review of State-of-the-Art Techniques for PMSM Parameter Identification. J. Electr. Eng. Technol. 2020, 15, 1177–1187. [Google Scholar] [CrossRef]
- Boje, E.S.; Balda, J.C.; Harley, R.G.; Beck, R.C. Time-domain Identification of Synchronous Machine Parameters from Simple Standstill Test. IEEE Trans. Energy Convers. 1990, 5, 164–175. [Google Scholar] [CrossRef] [PubMed]
- Cavagnino, A.; Lazzari, M.; Profumo, F.; Tenconi, A. Axial Flux Interior PM Synchronous Motor: Parameters Identification and Steady-State Performance Measurements. IEEE Trans. Ind. Appl. 2000, 36, 1581–1588. [Google Scholar]
- Choi, C.; Lee, W.; Kwon, S.O.; Hong, J.P. Experimental Estimation of Inductance for Interior Permanent Magnet Synchronous Machine Considering Temperature Distribution. IEEE Trans. Magn. 2013, 49, 2990–2996. [Google Scholar] [CrossRef]
- Štumberger, B.; Štumberger, G.; Dolinar, D.; Hamler, A.; Trlep, M. Evaluation of Saturation and Cross-Magnetization Effects in Interior Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Appl. 2003, 39, 1264–1271. [Google Scholar] [CrossRef]
- Shuang, B.; Zhu, Z.Q. A Novel Method for Estimating the High Frequency Incremental DQ-Axis and Cross-Coupling Inductances in Interior Permanent Magnet Synchronous Motor. IEEE Trans. Ind. Appl. 2021, 57, 4913–4923. [Google Scholar] [CrossRef]
- Mohamed, Y.A.R.I.; Lee, T.K. Adaptive self-tuning MTPA vector controller for IPMSM drive system. IEEE Trans. Energy Convers. 2006, 21, 636–644. [Google Scholar] [CrossRef]
- Liu, K.; Zhu, Z.Q. Online Estimation of the Rotor Flux Linkage and Voltage-Source Inverter Nonlinearity in Permanent Magnet Synchronous Machine Drives. IEEE Trans. Power Electron. 2014, 29, 418–427. [Google Scholar] [CrossRef]
- Shi, Y.; Sun, K.; Huang, L.; Li, Y. Online Identification of Permanent Magnet Flux Based on Extended Kalman Filter for IPMSM Drive with Position Sensorless Control. IEEE Trans. Ind. Electron. 2012, 59, 4169–4178. [Google Scholar] [CrossRef]
- Nicola, M.; Nicola, C.-I. Improvement Performances of Sensorless Control for PMSM Based on FOC Strategy Using Luenberger Observer, Sine Cosine Algorithm, and RL-TD3 Agent. In Proceedings of the 2023 International Conference on Electromechanical and Energy Systems (SIELMEN), Craiova, Romania, 11–13 October 2023; pp. 1–7. [Google Scholar]
- Ren, W.; Wu, Y.; Du, R. A Vector Control System of PMSM with the Assistance of Fuzzy PID Controller. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 2205–2210. [Google Scholar]
- Alzayed, M.; Chaoui, H.; Farajpour, Y. Dynamic Direct Voltage MTPA Current Sensorless Drives for Interior PMSM-Based Electric Vehicles. IEEE Trans. Veh. Technol. 2023, 72, 3175–3185. [Google Scholar] [CrossRef]
- Alzayed, M.; Chaoui, H. Direct Voltage MTPA Speed Control of IPMSM-Based Electric Vehicles. IEEE Access 2023, 11, 33858–33871. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Jokien, T.; Hrabovcova, V. Design of Rotating Electrical Machines; John Wiely & Sons, Ltd.: Hoboken, NJ, USA, 2008. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Unit |
|---|---|---|
| Pole | 4 | - |
| DC Link Voltage | 310 | V |
| Max. Current | 6 | A |
| Max. Torque | 3.6 | Nm |
| Phase Resistance | 0.511 | Ohm |
| d-axis Inductance | 9 | mH |
| q-axis Inductance | 13 | mH |
| Magnetic Flux | 0.2 | Wb |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahn, H.-W.; Bae, S.; Park, H.-J. Efficient Online Inductance Tracking Algorithm for IPMSM Using Torque Estimation. Energies 2025, 18, 469. https://doi.org/10.3390/en18030469
Ahn H-W, Bae S, Park H-J. Efficient Online Inductance Tracking Algorithm for IPMSM Using Torque Estimation. Energies. 2025; 18(3):469. https://doi.org/10.3390/en18030469
Chicago/Turabian StyleAhn, Han-Woong, Sungil Bae, and Hyun-Jong Park. 2025. "Efficient Online Inductance Tracking Algorithm for IPMSM Using Torque Estimation" Energies 18, no. 3: 469. https://doi.org/10.3390/en18030469
APA StyleAhn, H.-W., Bae, S., & Park, H.-J. (2025). Efficient Online Inductance Tracking Algorithm for IPMSM Using Torque Estimation. Energies, 18(3), 469. https://doi.org/10.3390/en18030469