



Friction and Regenerative Braking Shares Under Various Laboratory and On-Road Driving Conditions of a Plug-In Hybrid Passenger Car

 , ,
, ,  ,
,  and
and
Abstract
1. Introduction
2. Materials and Methods
2.1. Theoretical Background
2.1.1. Equations
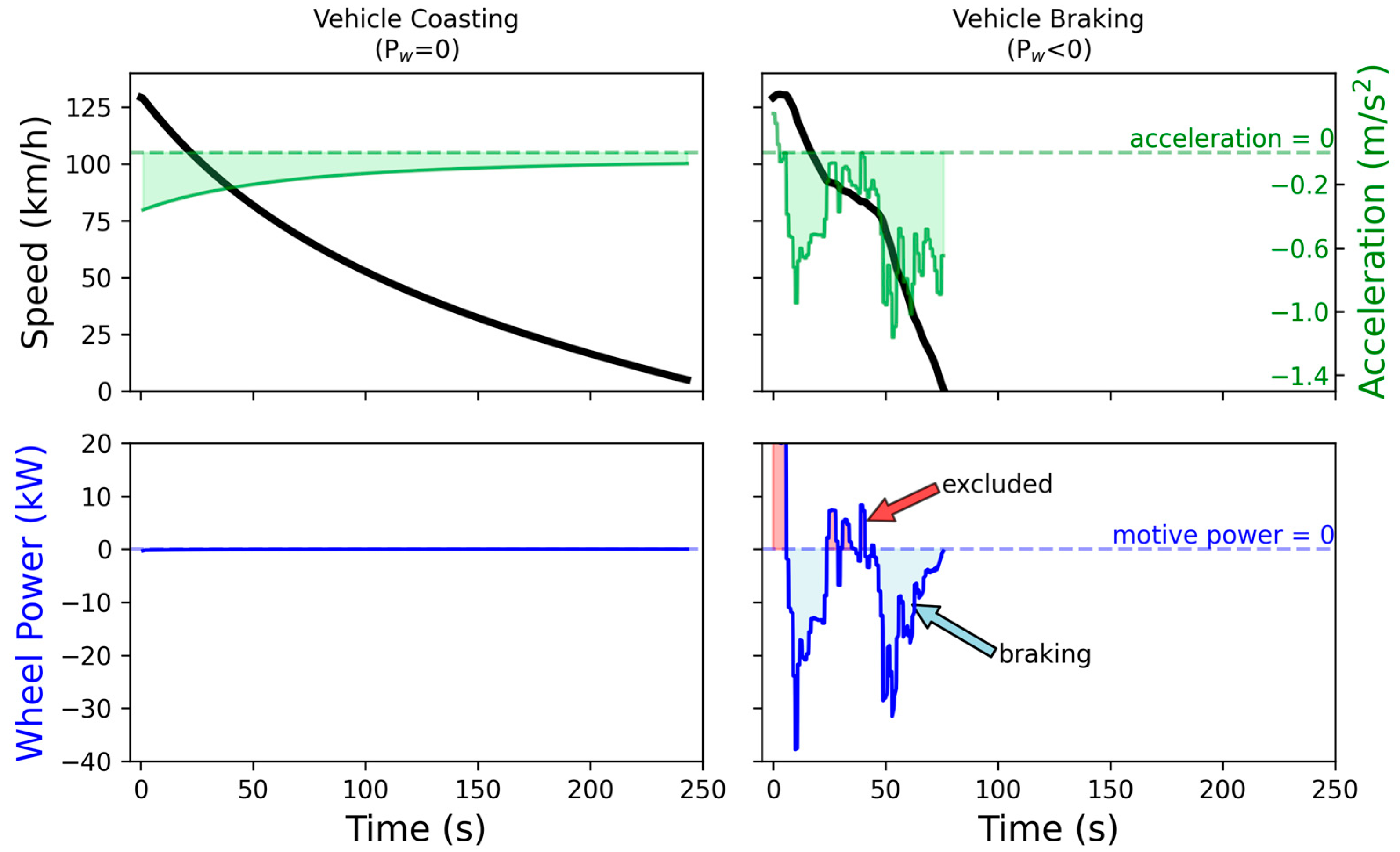
2.1.2. Coasting and Braking
2.2. Experimental Setup
2.2.1. Vehicle
2.2.2. Chassis Dynamometer and Cycles
2.2.3. Determination of Cp
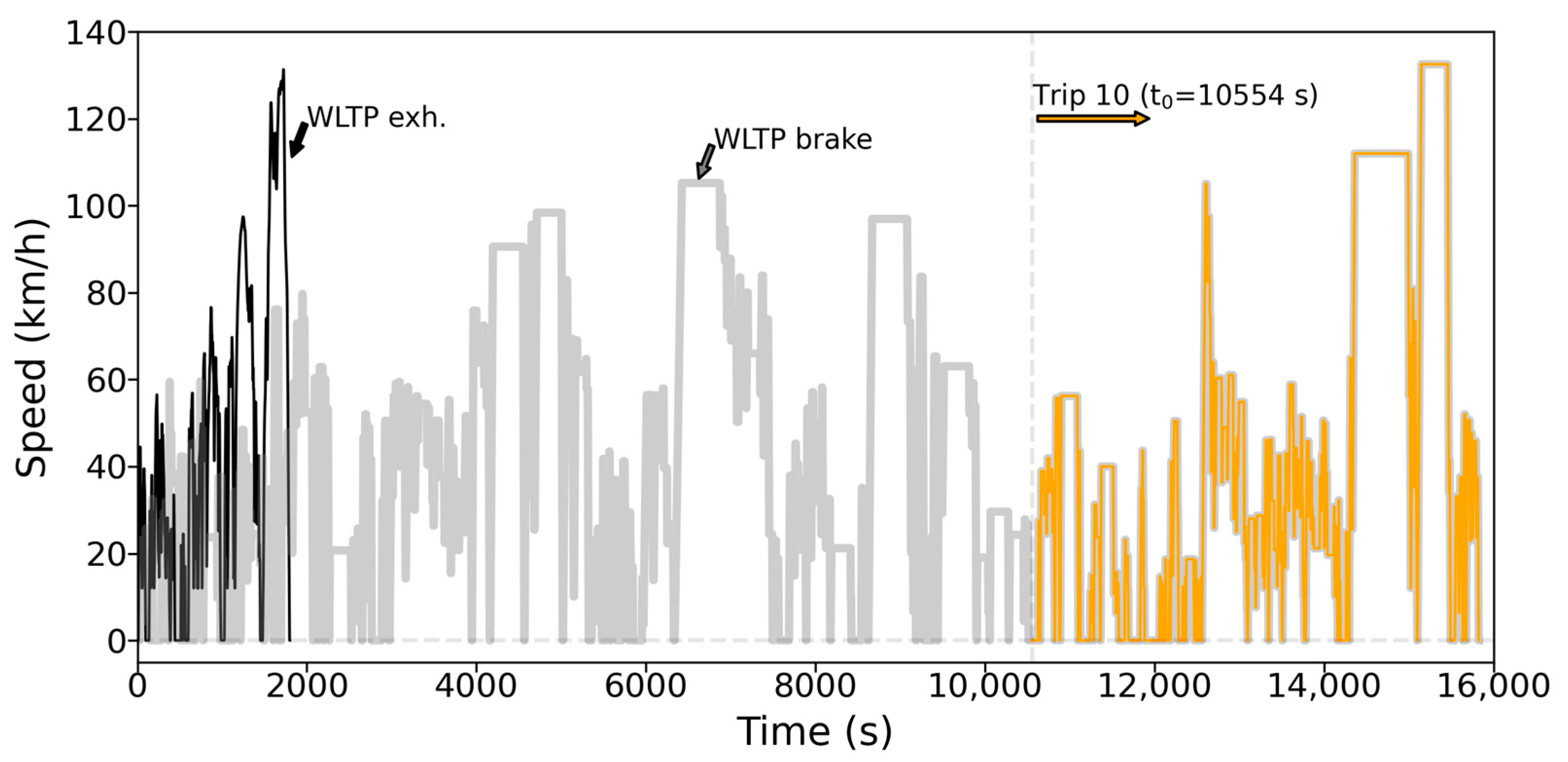
2.2.4. Real-World Trips
3. Results
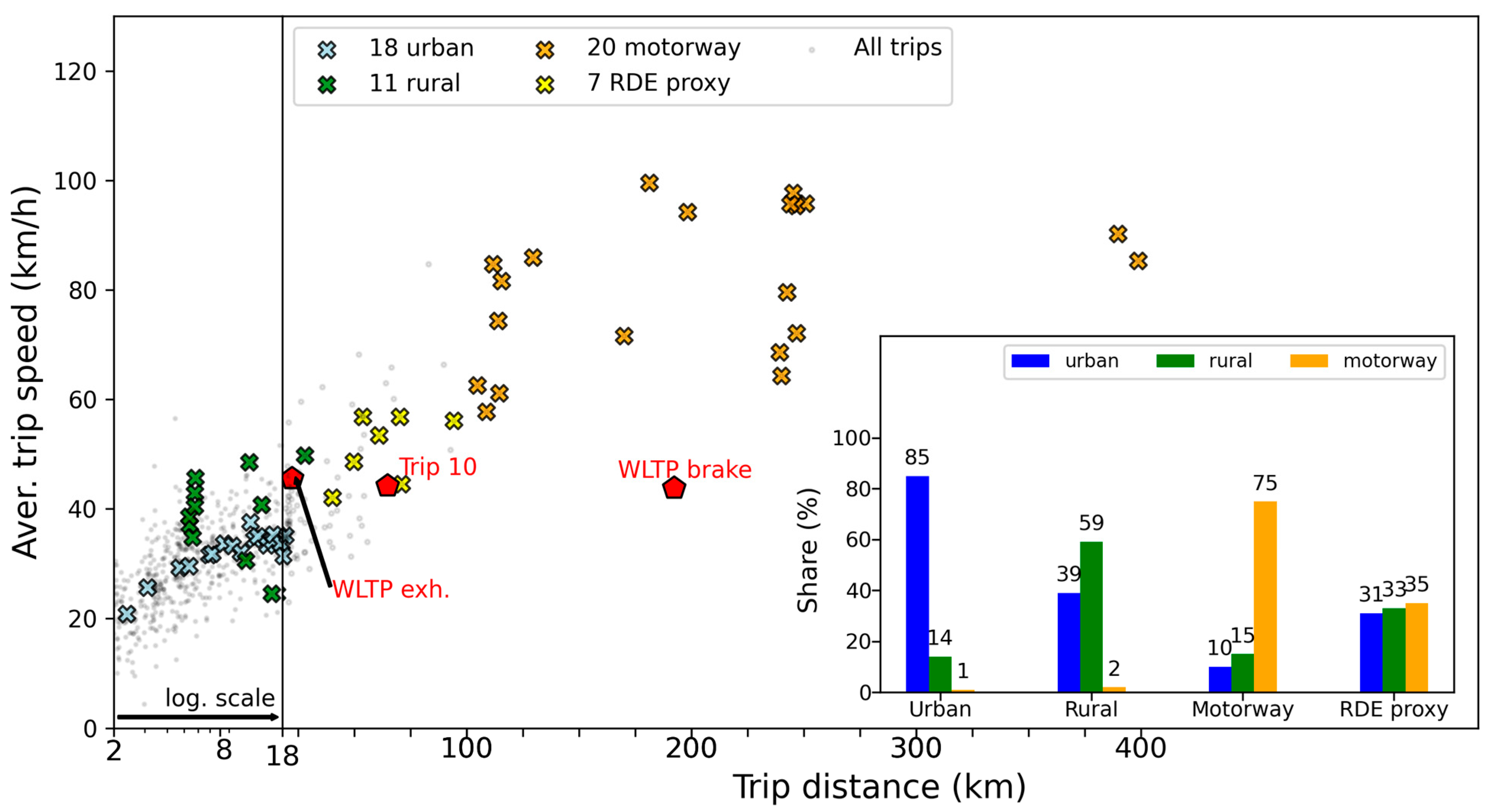
3.1. Characteristics of Real-World Trips
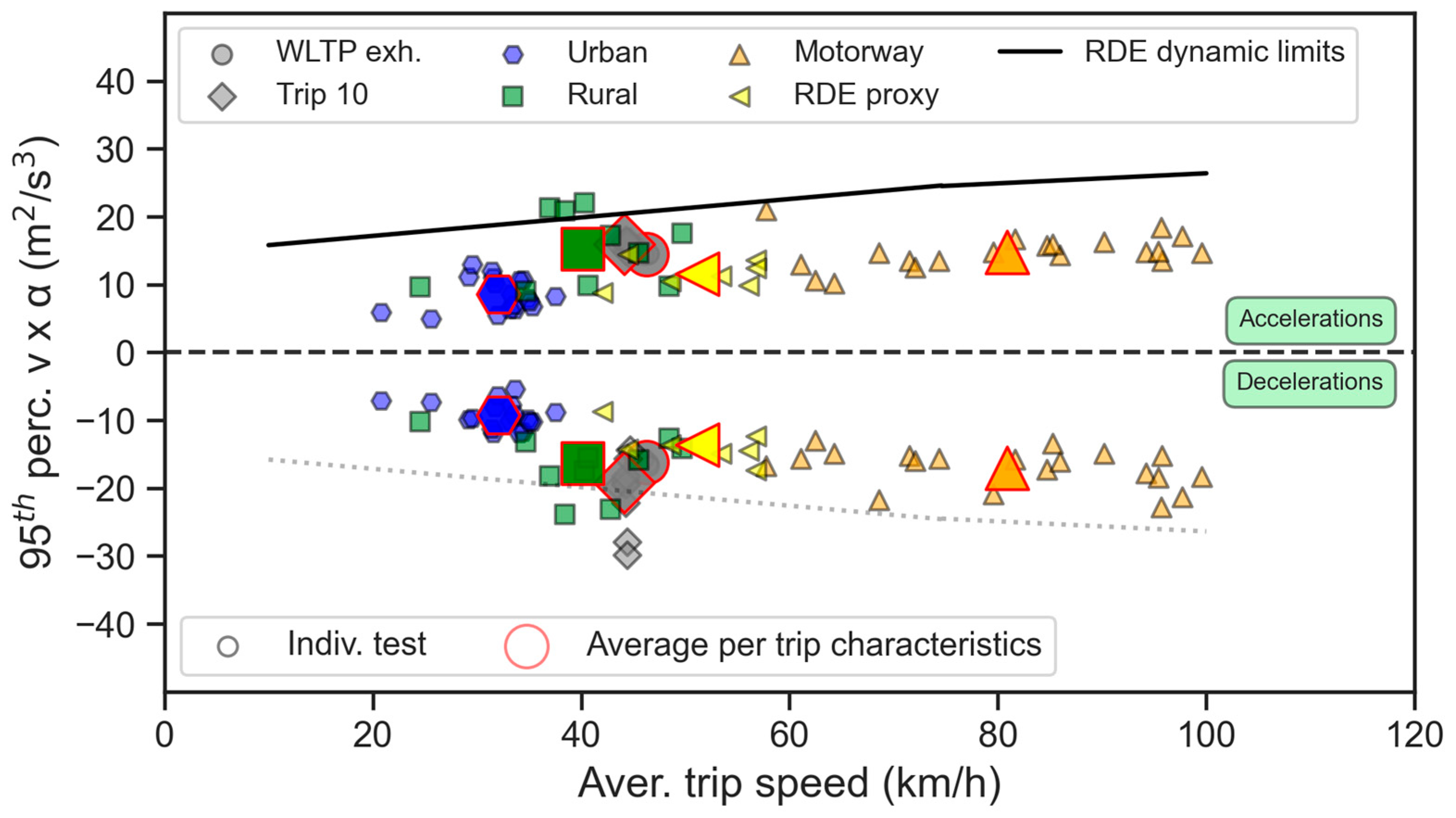
3.2. Dynamics of Laboratory Cycles and Real World Trips
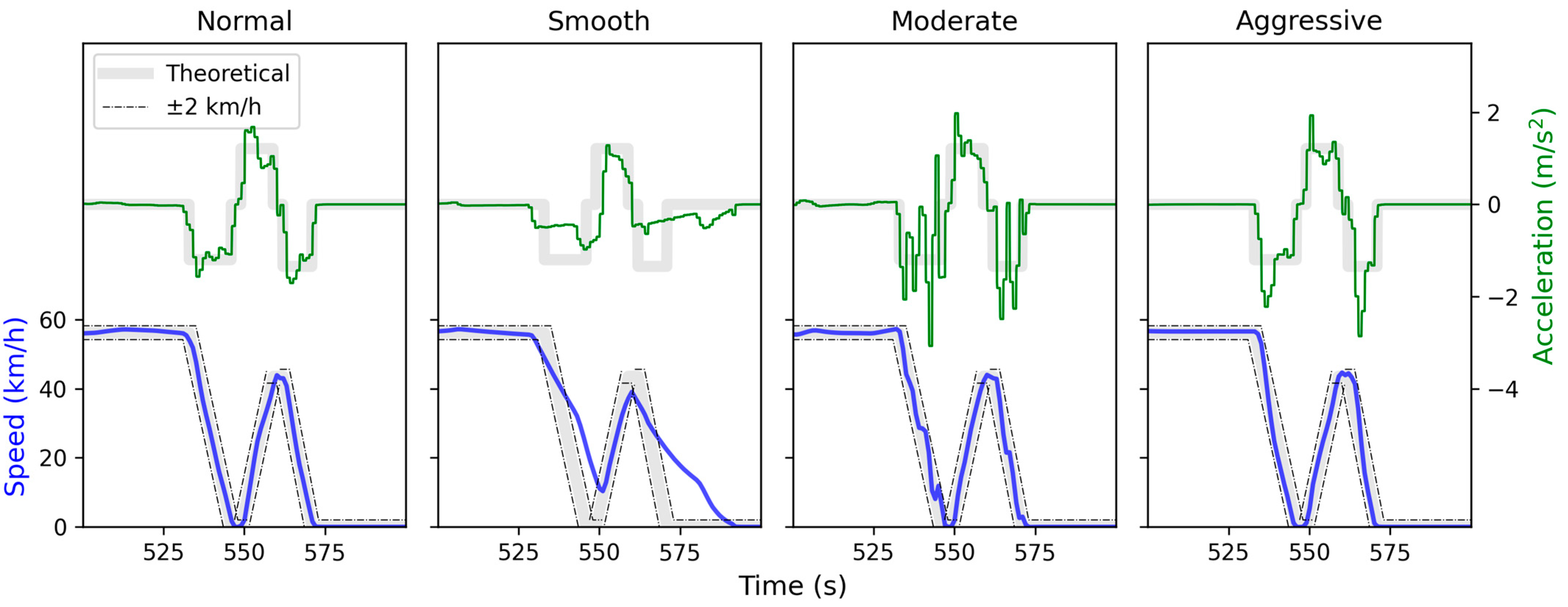
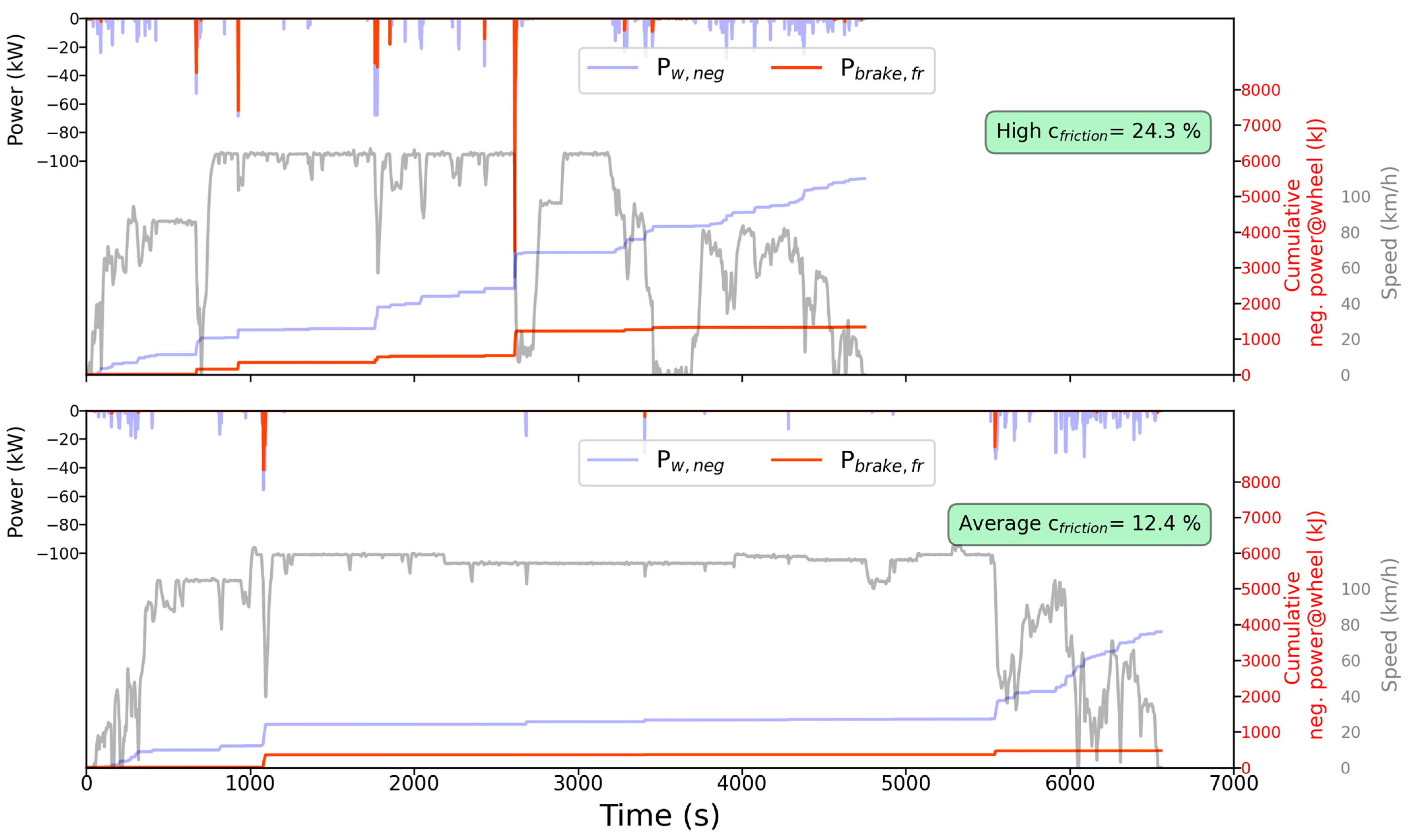
3.3. Real-Time Examples of Braking
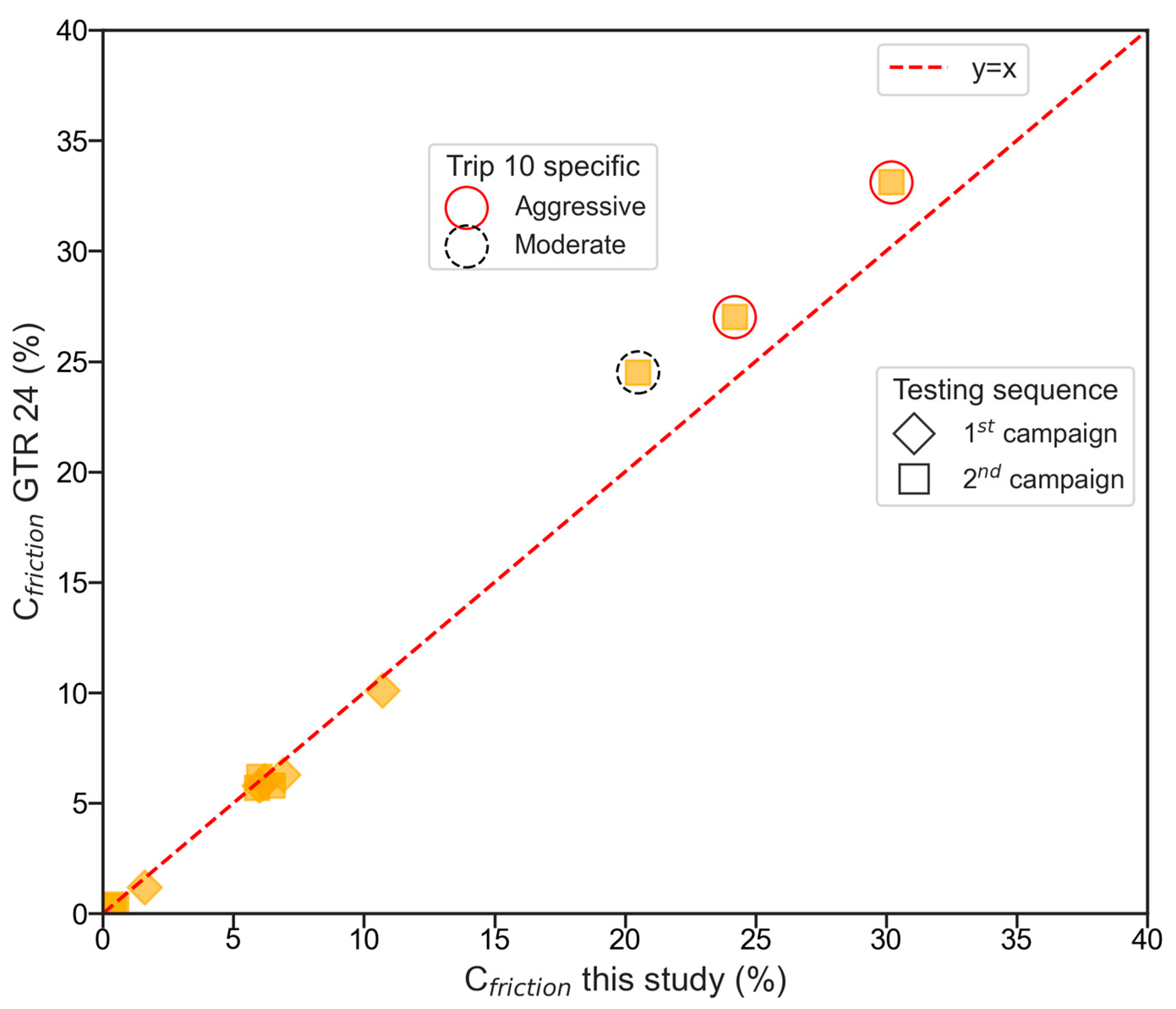
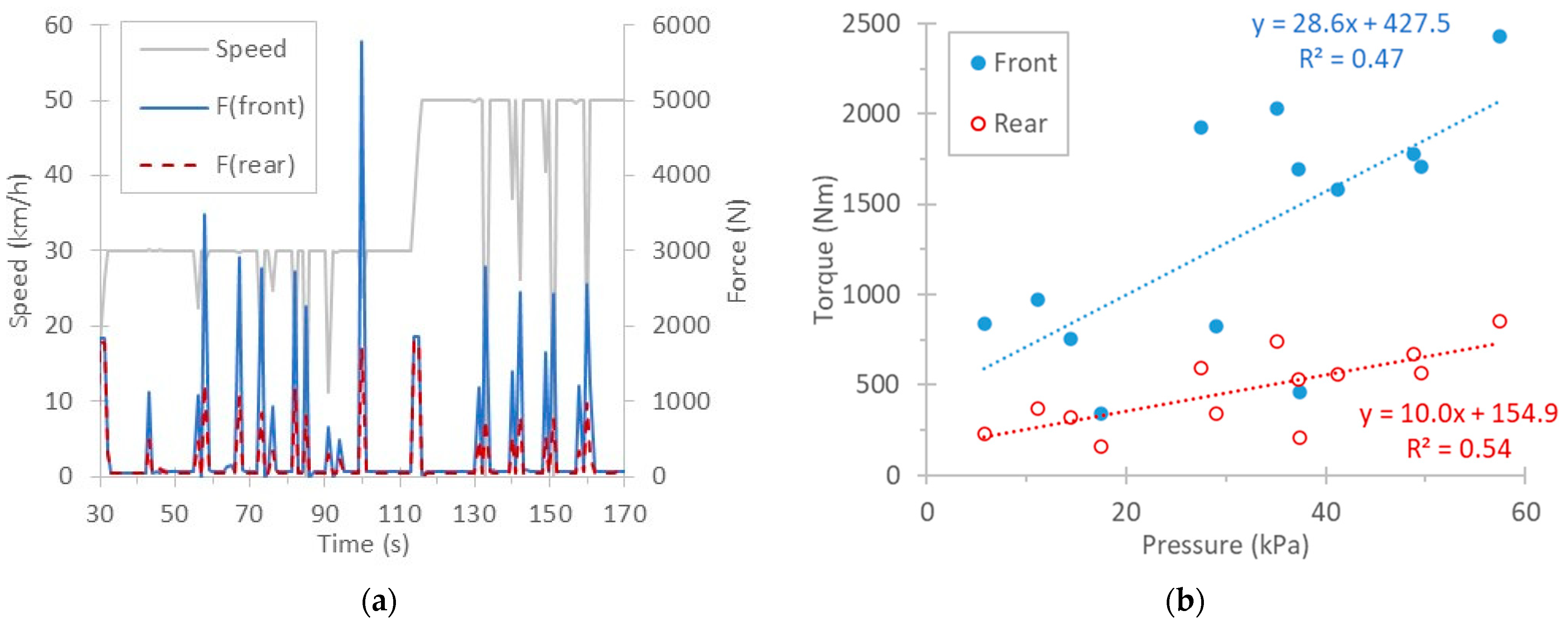
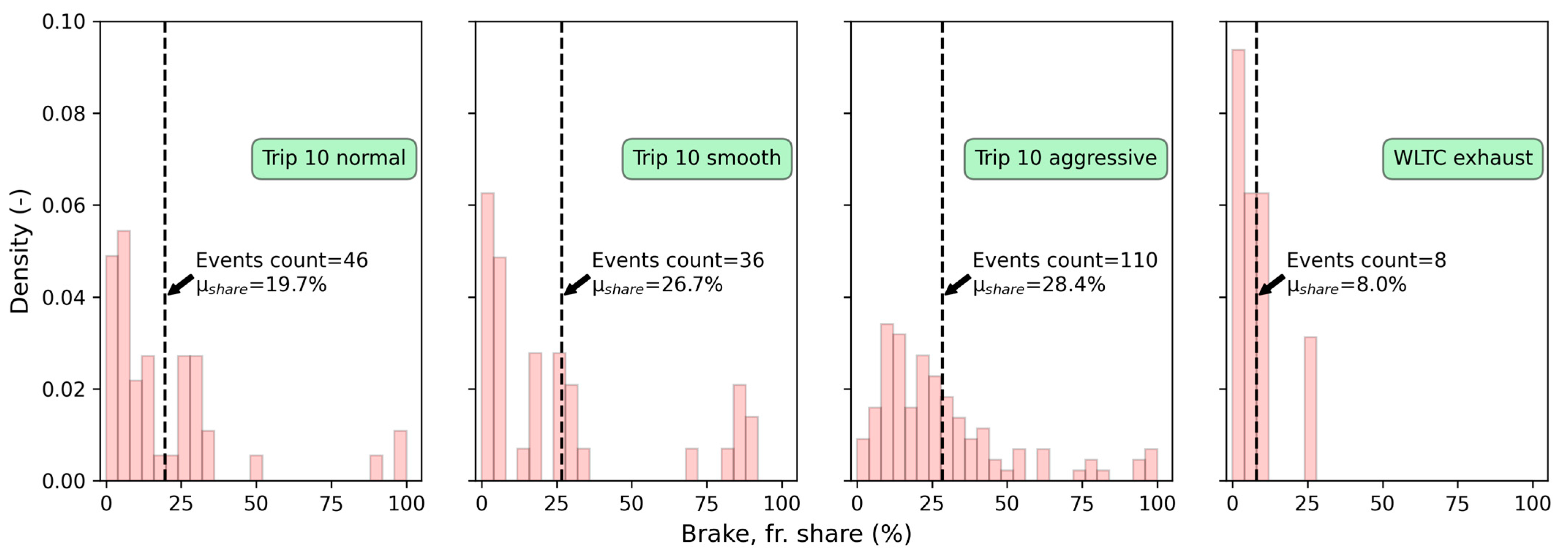
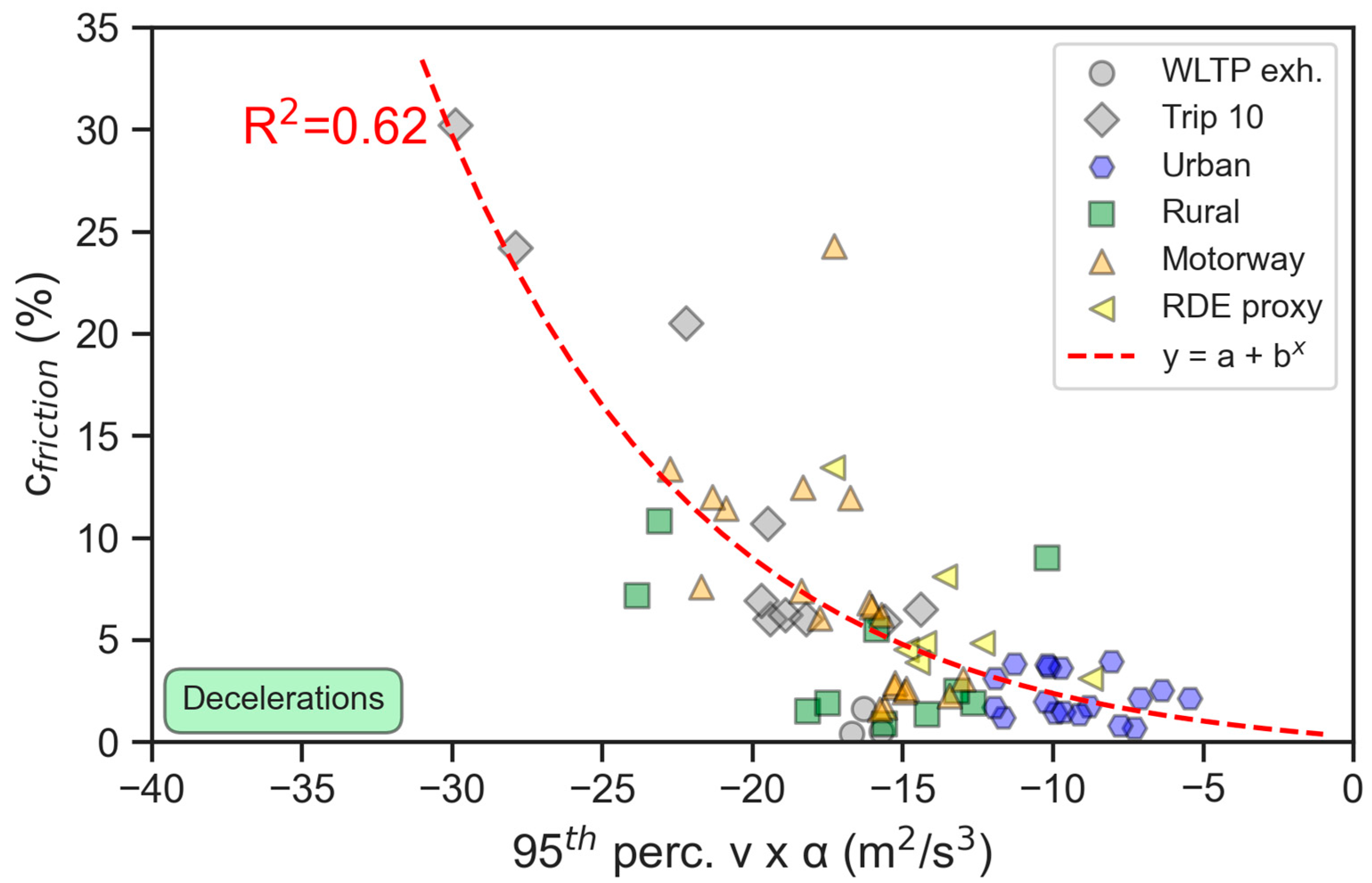
3.4. Friction Braking Shares
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| API | Application programming interface |
| EM | Electric motor |
| EU | European Union |
| FA | Front axle |
| FD | Force distribution |
| ICE | Internal combustion engine |
| IPDR | Inertial power difference rating |
| IPDW | Inertial power difference work |
| JRC | Joint Research Centre |
| GTR | Global technical regulation |
| NAO | Non-asbestos organic |
| OBD | On-board diagnostics |
| OICA | International Organization of Motor Vehicle Manufacturers (Organisation Internationale des Constructeurs d’Automobiles) |
| PM | Particulate matter |
| RA | Rear axle |
| RDE | Real-driving emission |
| SOC | State of charge |
| UNECE | United Nations Economic Commission for Europe |
| WLTP | Worldwide harmonised light vehicles test procedure |
Appendix A
Appendix A.1. Comparison to the Regulatory Method
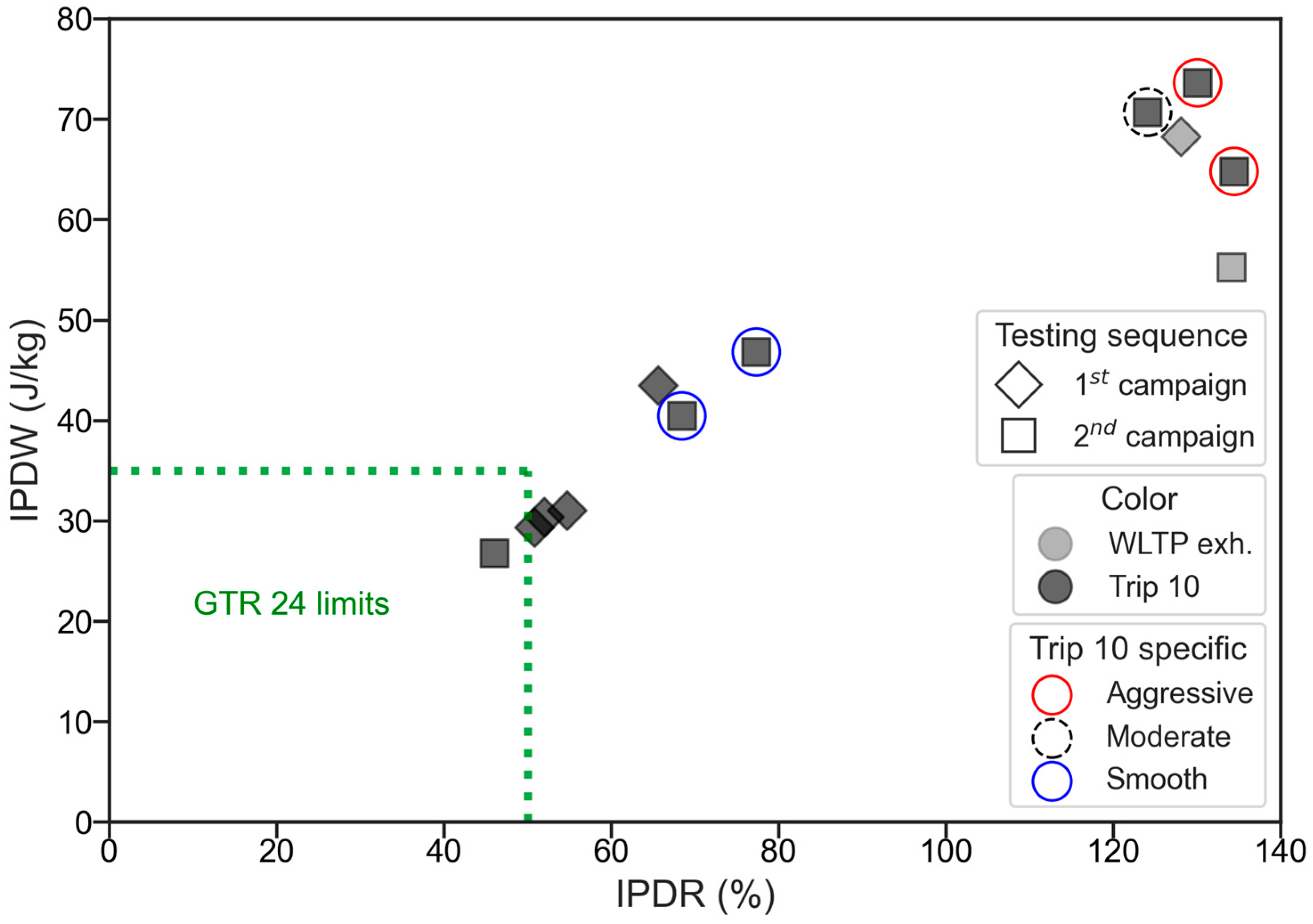
Appendix A.2. Test Quality Criteria for Laboratory Cycles
References
- Sicard, P.; Agathokleous, E.; De Marco, A.; Paoletti, E.; Calatayud, V. Urban population exposure to air pollution in Europe over the last decades. Environ. Sci. Eur. 2021, 33, 28. [Google Scholar] [CrossRef]
- Beloconi, A.; Vounatsou, P. Substantial Reduction in Particulate Matter Air Pollution across Europe during 2006–2019: A Spatiotemporal Modeling Analysis. Environ. Sci. Technol. 2021, 55, 15505–15518. [Google Scholar] [CrossRef]
- Wallington, T.J.; Anderson, J.E.; Dolan, R.H.; Winkler, S.L. Vehicle Emissions and Urban Air Quality: 60 Years of Progress. Atmosphere 2022, 13, 650. [Google Scholar] [CrossRef]
- Ravi, S.S.; Osipov, S.; Turner, J.W.G. Impact of Modern Vehicular Technologies and Emission Regulations on Improving Global Air Quality. Atmosphere 2023, 14, 1164. [Google Scholar] [CrossRef]
- Giechaskiel, B.; Grigoratos, T.; Dilara, P.; Karageorgiou, T.; Ntziachristos, L.; Samaras, Z. Light-Duty Vehicle Brake Emission Factors. Atmosphere 2024, 15, 97. [Google Scholar] [CrossRef]
- Hooftman, N.; Oliveira, L.; Messagie, M.; Coosemans, T.; Van Mierlo, J. Environmental Analysis of Petrol, Diesel and Electric Passenger Cars in a Belgian Urban Setting. Energies 2016, 9, 84. [Google Scholar] [CrossRef]
- Christou, A.; Giechaskiel, B.; Olofsson, U.; Grigoratos, T. Review of Health Effects of Automotive Brake and Tyre Wear Particles. Toxics 2025, 13, 301. [Google Scholar] [CrossRef]
- European Commission Regulation (EU) 2024/1257 of the European Parliament and of the Council on type-approval of motor vehicles and engines and of systems, components and separate technical units intended for such vehicles, with respect to their emissions and battery durability (Euro 7), amending Regulation (EU) 2018/858 of the European Parliament and of the Council and repealing Regulations (EC) no 715/2007 and (EC) no 595/2009 of the European Parliament and of the Council, Commission Regulation (EU) no 582/2011, Commission Regulation (EU) 2017/1151, Commission Regulation (EU) 2017/2400 and Commission implementing Regulation (EU) 2022/1362. Off. J. Eur. Comm. 2024, L, 1–49.
- Grigoratos, T.; Mamakos, A.; Vedula, R.; Arndt, M.; Lugovyy, D.; Hafenmayer, C.; Moisio, M.; Agudelo, C.; Giechaskiel, B. Characterization of Laboratory Particulate Matter (PM) Mass Setups for Brake Emission Measurements. Atmosphere 2023, 14, 516. [Google Scholar] [CrossRef]
- UNECE. UNECE Global Technical Regulation (GTR) 24; UNECE: Geneva, Switzerland, 2025; Available online: https://unece.org/transport/standards/transport/vehicle-regulations-wp29/global-technical-regulations-gtrs (accessed on 5 July 2025).
- Xu, G.; Li, W.; Xu, K.; Song, Z. An Intelligent Regenerative Braking Strategy for Electric Vehicles. Energies 2011, 4, 1461–1477. [Google Scholar] [CrossRef]
- Qiu, C.; Wang, G. New evaluation methodology of regenerative braking contribution to energy efficiency improvement of electric vehicles. Energy Convers. Manag. 2016, 119, 389–398. [Google Scholar] [CrossRef]
- Valladolid, J.; Calle, M.; Guiracocha, A. Analysis of regenerative braking efficiency in an electric vehicle through experimental tests. Ingenius Rev. Cienc. Tecnol. 2023, 29, 24–31. [Google Scholar] [CrossRef]
- Cai, W.; Liu, C. Long Downhill Braking and Energy Recovery of Pure Electric Commercial Vehicles. World Electr. Veh. J. 2024, 15, 51. [Google Scholar] [CrossRef]
- Pusztai, Z.; Kőrös, P.; Szauter, F.; Friedler, F. Implementation of Optimized Regenerative Braking in Energy Efficient Driving Strategies. Energies 2023, 16, 2682. [Google Scholar] [CrossRef]
- Georgiev, P.; De Filippis, G.; Gruber, P.; Sorniotti, A. On the Benefits of Active Aerodynamics on Energy Recuperation in Hybrid and Fully Electric Vehicles. Energies 2023, 16, 5843. [Google Scholar] [CrossRef]
- Castillo Aguilar, J.; Pérez Fernández, J.; Velasco García, J.; Cabrera Carrillo, J. Regenerative Intelligent Brake Control for Electric Motorcycles. Energies 2017, 10, 1648. [Google Scholar] [CrossRef]
- Fayad, A.; Ibrahim, H.; Ilinca, A.; Sattarpanah Karganroudi, S.; Issa, M. Energy Recovering Using Regenerative Braking in Diesel–Electric Passenger Trains: Economical and Technical Analysis of Fuel Savings and GHG Emission Reductions. Energies 2021, 15, 37. [Google Scholar] [CrossRef]
- Rego, N.; Castro, R. Regenerative Braking Applied to a Student Team’s Electric Racing Motorcycle Prototype: A Theoretical Study. Appl. Sci. 2023, 13, 3784. [Google Scholar] [CrossRef]
- Zhang, Q.; Yin, J.; Fang, T.; Guo, Q.; Sun, J.; Peng, J.; Zhong, C.; Wu, L.; Mao, H. Regenerative braking system effectively reduces the formation of brake wear particles. J. Hazard. Mater. 2024, 465, 133350. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, H.; Gao, J.; Li, Y.; Dave, K.; Chen, J.; Federici, M.; Perricone, G. Comparative analysis of non-exhaust airborne particles from electric and internal combustion engine vehicles. J. Hazard. Mater. 2021, 420, 126626. [Google Scholar] [CrossRef]
- Woo, S.-H.; Jang, H.; Lee, S.-B.; Lee, S. Comparison of total PM emissions emitted from electric and internal combustion engine vehicles: An experimental analysis. Sci. Total Environ. 2022, 842, 156961. [Google Scholar] [CrossRef]
- Jung, H. Fuel Economy of Plug-In Hybrid Electric and Hybrid Electric Vehicles: Effects of Vehicle Weight, Hybridization Ratio and Ambient Temperature. World Electr. Veh. J. 2020, 11, 31. [Google Scholar] [CrossRef]
- Agudelo, C.; Vedula, R.T.; Collier, S.; Stanard, A. Brake Particulate Matter Emissions Measurements for Six Light-Duty Vehicles Using Inertia Dynamometer Testing. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 3, 994–1019. [Google Scholar] [CrossRef]
- Storch, L.; Hamatschek, C.; Hesse, D.; Feist, F.; Bachmann, T.; Eichler, P.; Grigoratos, T. Comprehensive Analysis of Current Primary Measures to Mitigate Brake Wear Particle Emissions from Light-Duty Vehicles. Atmosphere 2023, 14, 712. [Google Scholar] [CrossRef]
- Dimopoulos Eggenschwiler, P.; Schreiber, D.; Habersatter, J. Brake Particle PN and PM Emissions of a Hybrid Light Duty Vehicle Measured on the Chassis Dynamometer. Atmosphere 2023, 14, 784. [Google Scholar] [CrossRef]
- Bondorf, L.; Köhler, L.; Grein, T.; Epple, F.; Philipps, F.; Aigner, M.; Schripp, T. Airborne Brake Wear Emissions from a Battery Electric Vehicle. Atmosphere 2023, 14, 488. [Google Scholar] [CrossRef]
- Hagino, H. Feasibility of Measuring Brake-Wear Particle Emissions from a Regenerative-Friction Brake Coordination System via Dynamometer Testing. Atmosphere 2024, 15, 75. [Google Scholar] [CrossRef]
- Komnos, D.; Broekaert, S.; Zacharof, N.; Ntziachristos, L.; Fontaras, G. A method for quantifying the resistances of light and heavy-duty vehicles under in-use conditions. Energy Convers. Manag. 2024, 299, 117810. [Google Scholar] [CrossRef]
- European Commission, Commission Regulation (EU) 2017/1151 of 1 June 2017 supplementing Regulation (EC) No 715/2007 of the European Parliament and of the Council on type-approval of motor vehicles with respect to emissions from light passenger and commercial vehicles (Euro 5 and Euro 6) and on access to vehicle repair and maintenance information, amending Directive 2007/46/EC of the European Parliament and of the Council, Commission Regulation (EC) No 692/2008 and Commission Regulation (EU) No 1230/2012 and repealing Commission Regulation (EC) No 692/2008. Off. J. Eur. Comm. 2017, L175, 1–643. Available online: http://data.europa.eu/eli/reg/2017/1151/2023-09-01 (accessed on 5 July 2025).
- Ilie, F.; Cristescu, A.-C. Tribological Behavior of Friction Materials of a Disk-Brake Pad Braking System Affected by Structural Changes—A Review. Materials 2022, 15, 4745. [Google Scholar] [CrossRef]
- JRC Transport Data Lab. Experimental Activities. 2024. Available online: https://green-driving.jrc.ec.europa.eu/Experimental_activities (accessed on 5 July 2025).
- Suarez, J.; Laverde, A.; Tansini, A.; Ktistakis, M.A.; Komnos, D.; Fontaras, G. Observations on the Driving of Plug-In Hybrid Cars in Real-World Conditions. In Smart Energy for Smart Transport; Lecture Notes in Intelligent Transportation and Infrastructure; Nathanail, E.G., Gavanas, N., Adamos, G., Eds.; Springer Nature: Cham, Switzerland, 2023; pp. 143–154. ISBN 978-3-031-23720-1. [Google Scholar]
- Pavlovic, J.; Tansini, A.; Suarez, J.; Fontaras, G. Influence of vehicle and battery ageing and driving modes on emissions and efficiency in Plug-in hybrid vehicles. Energy Convers. Manag. X 2024, 24, 100776. [Google Scholar] [CrossRef]
- GitHub Meteostat—Python. 2025. Available online: https://github.com/meteostat/meteostat-python (accessed on 5 July 2025).
- PMP Revised Technical Report for a New Amendment to UN GTR No. 24. 2025. Available online: https://unece.org/transport/documents/2025/03/informal-documents/pmp-revised-technical-report-new-amendment-un-gtr-no (accessed on 5 July 2023).
- Geng, C.; Ning, D.; Guo, L.; Xue, Q.; Mei, S. Simulation Research on Regenerative Braking Control Strategy of Hybrid Electric Vehicle. Energies 2021, 14, 2202. [Google Scholar] [CrossRef]
- Szumska, E.M. Regenerative Braking Systems in Electric Vehicles: A Comprehensive Review of Design, Control Strategies, and Efficiency Challenges. Energies 2025, 18, 2422. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engine Capacity [cm3] | Engine Power [kW] | Battery Capacity [KWh] | Motor Max Power [kW] | Test Mass 1 [kg] | Electric Range 1,2 [km] |
|---|---|---|---|---|---|
| 1987 | 111 | 13.6 | 120 | 1753 | 72 |
| Campaign | Origin | Braking Style | Number of Tests | Max-Min Initial SOC (%) | Max-Min Delta SOC (%) | Cell Temperature (°C) |
|---|---|---|---|---|---|---|
| First | Trip 10 | normal | 4 | 68–91 | 54–77 | 23 or 31 |
| WLTP exh. | normal | 1 | 81 | 27 | 23 | |
| Second | Trip 10 | aggressive | 2 | 91 | 78 | 23 |
| normal | 1 | 92 | 78 | 23 | ||
| smooth | 2 | 91 | 76 | 23 | ||
| moderate | 1 | 91 | 78 | 23 | ||
| WLTP exh. | normal | 2 | 55–58 | 26–29 | 23 |
| Scenario | Urban | Rural | Motorway | RDE Proxy |
|---|---|---|---|---|
| Base case | 2.3% | 4.2% | 7.3% | 6.1% |
| +10% mass | 2.0% | 3.8% | 6.3% | 5.4% |
| −10% mass | 2.6% | 4.8% | 8.5% | 7.0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Komnos, D.; Tansini, A.; Trentadue, G.; Fontaras, G.; Grigoratos, T.; Giechaskiel, B. Friction and Regenerative Braking Shares Under Various Laboratory and On-Road Driving Conditions of a Plug-In Hybrid Passenger Car. Energies 2025, 18, 4104. https://doi.org/10.3390/en18154104
Komnos D, Tansini A, Trentadue G, Fontaras G, Grigoratos T, Giechaskiel B. Friction and Regenerative Braking Shares Under Various Laboratory and On-Road Driving Conditions of a Plug-In Hybrid Passenger Car. Energies. 2025; 18(15):4104. https://doi.org/10.3390/en18154104
Chicago/Turabian StyleKomnos, Dimitrios, Alessandro Tansini, Germana Trentadue, Georgios Fontaras, Theodoros Grigoratos, and Barouch Giechaskiel. 2025. "Friction and Regenerative Braking Shares Under Various Laboratory and On-Road Driving Conditions of a Plug-In Hybrid Passenger Car" Energies 18, no. 15: 4104. https://doi.org/10.3390/en18154104
APA StyleKomnos, D., Tansini, A., Trentadue, G., Fontaras, G., Grigoratos, T., & Giechaskiel, B. (2025). Friction and Regenerative Braking Shares Under Various Laboratory and On-Road Driving Conditions of a Plug-In Hybrid Passenger Car. Energies, 18(15), 4104. https://doi.org/10.3390/en18154104