


Non-Linear Analytical Model for Bread-Loaf Linear PM Motor



Abstract
1. Introduction
2. Proposed Model
2.1. Permeance Sample
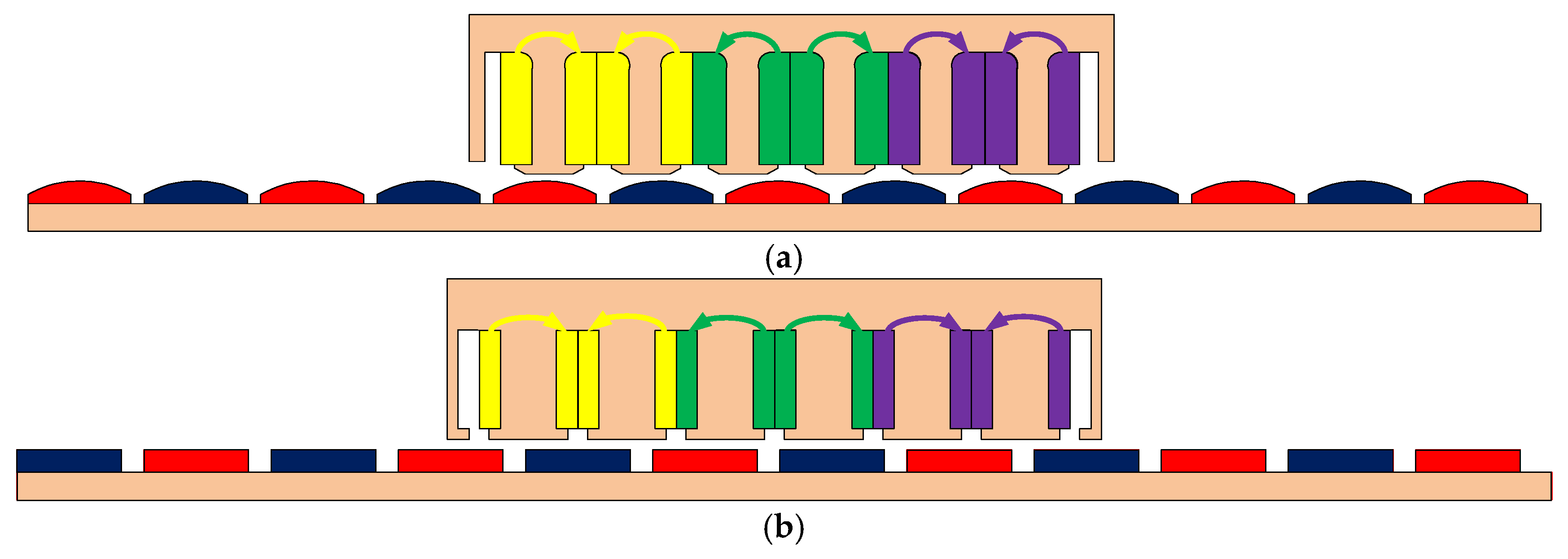
2.2. Air-Gap Modeling
2.3. Stator Modeling
2.4. Magnetic Source Modeling
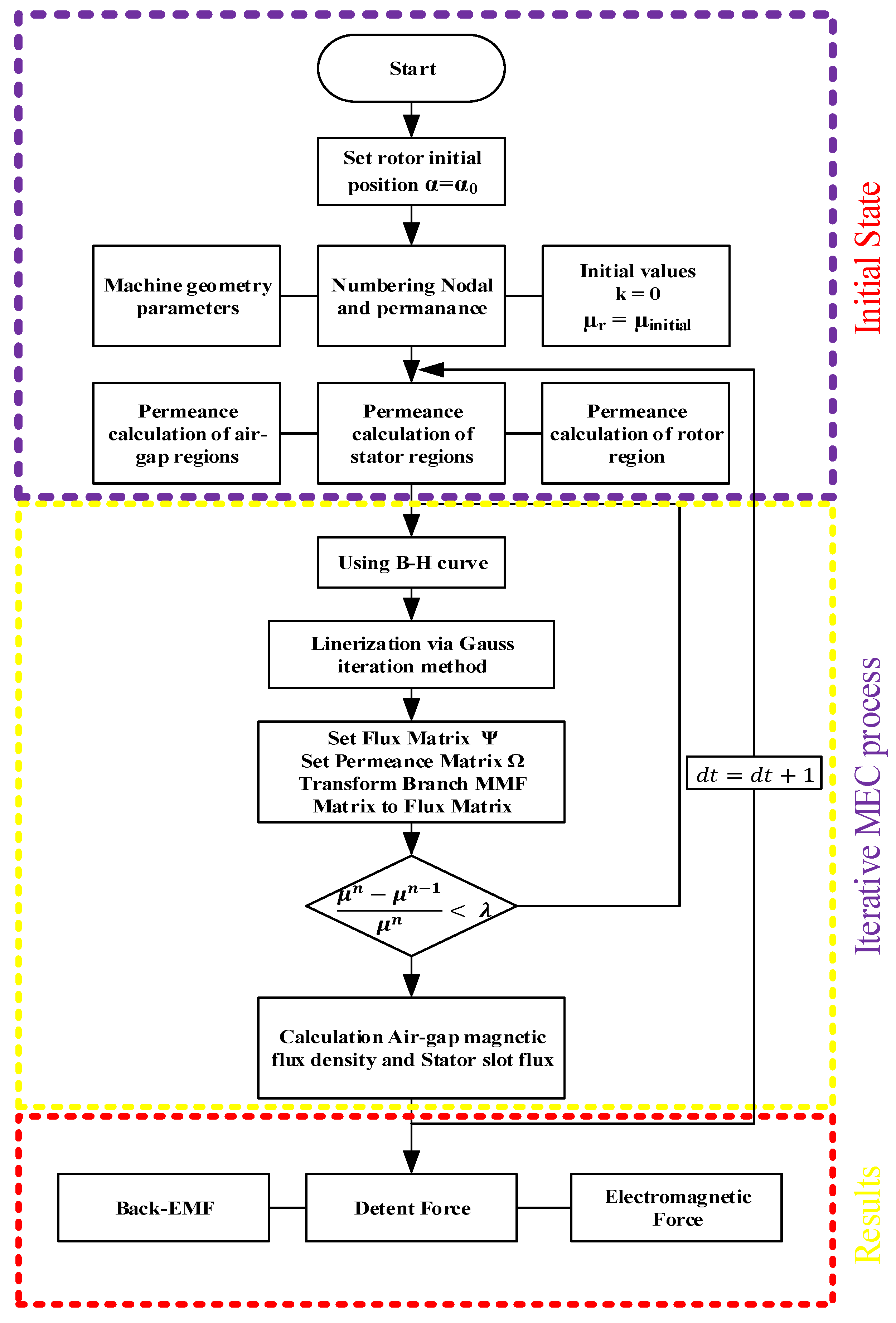
2.5. Iterative MEC Technique
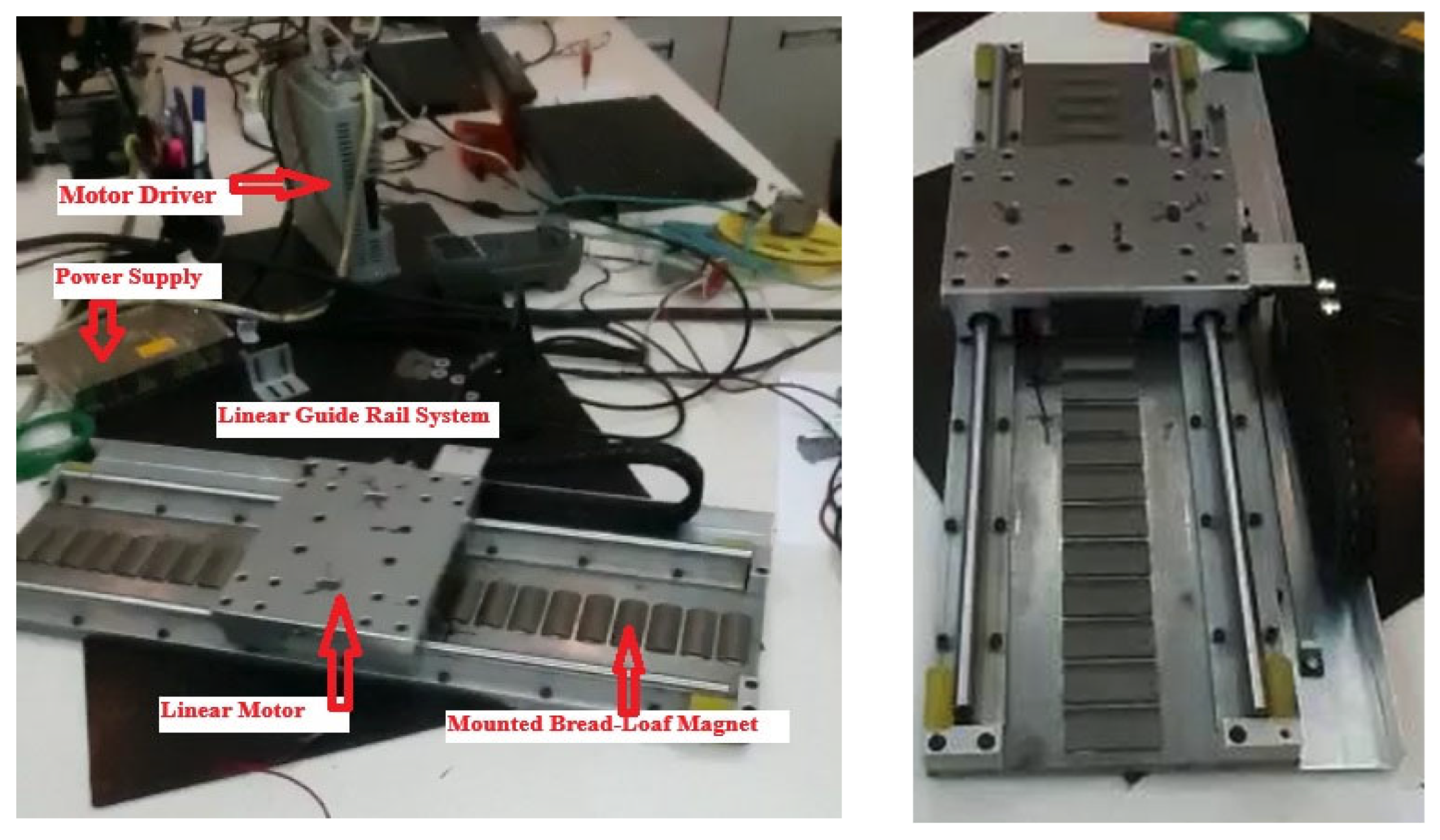
3. FEA and Experimental Validation
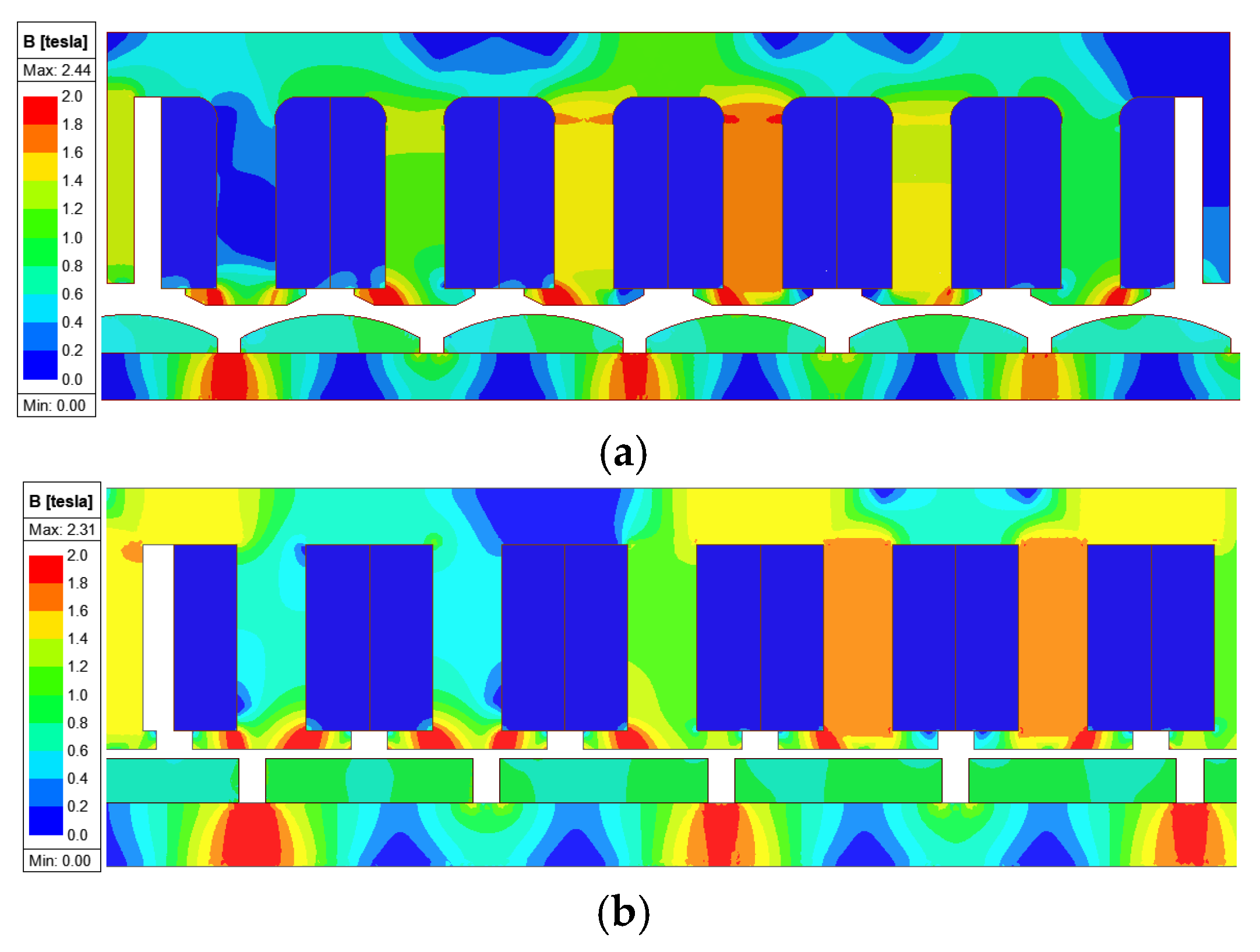
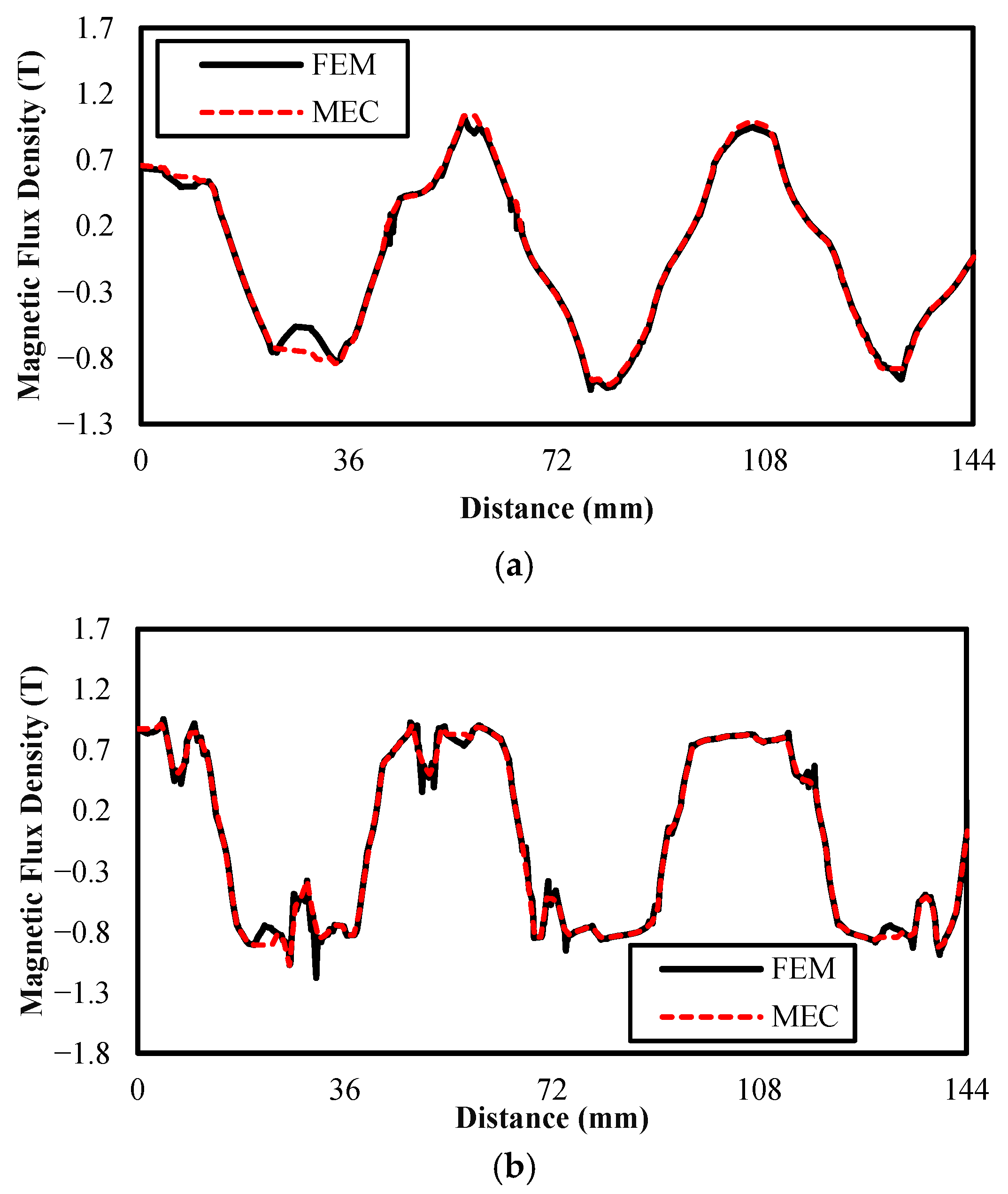
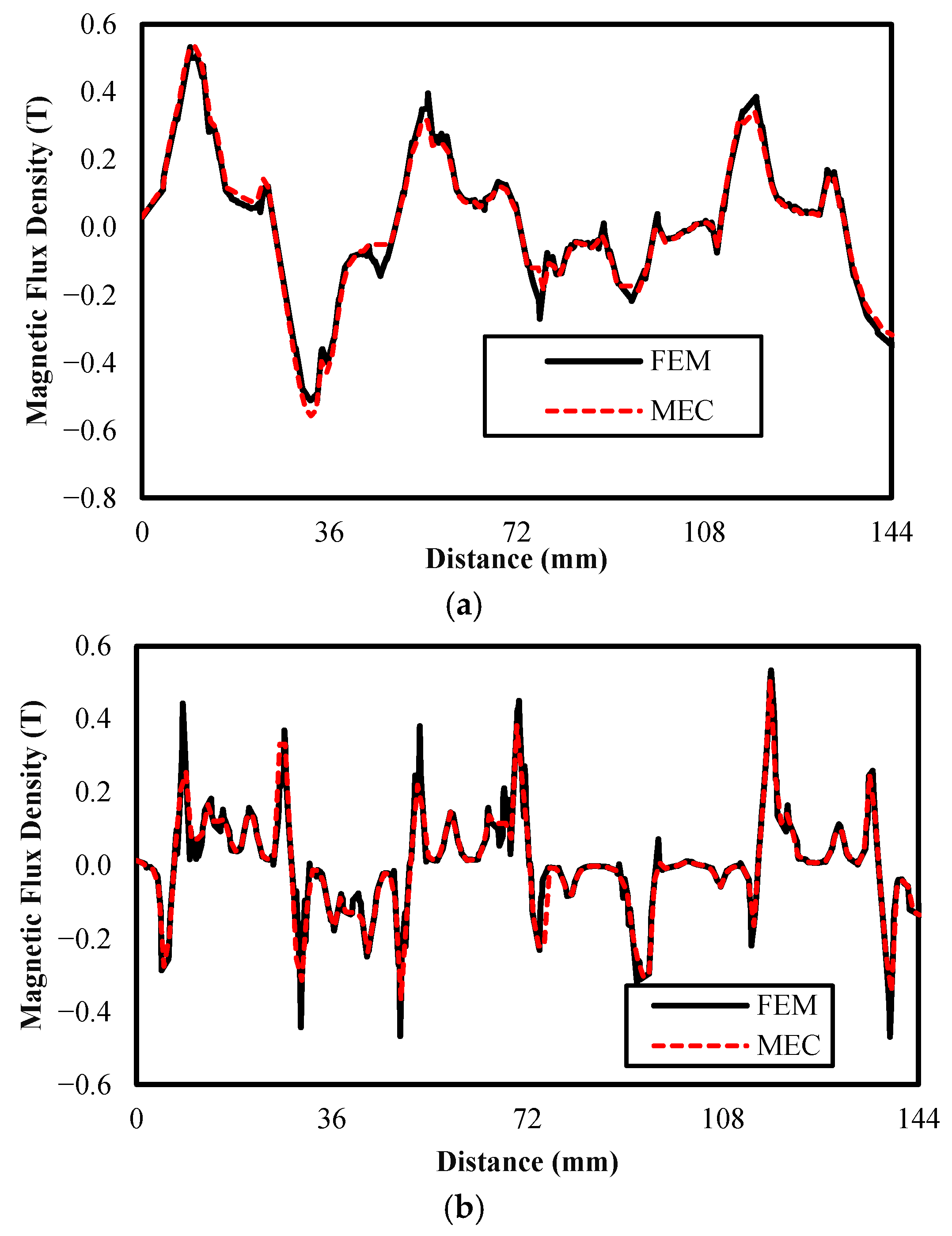
3.1. Air-Gap MF Density
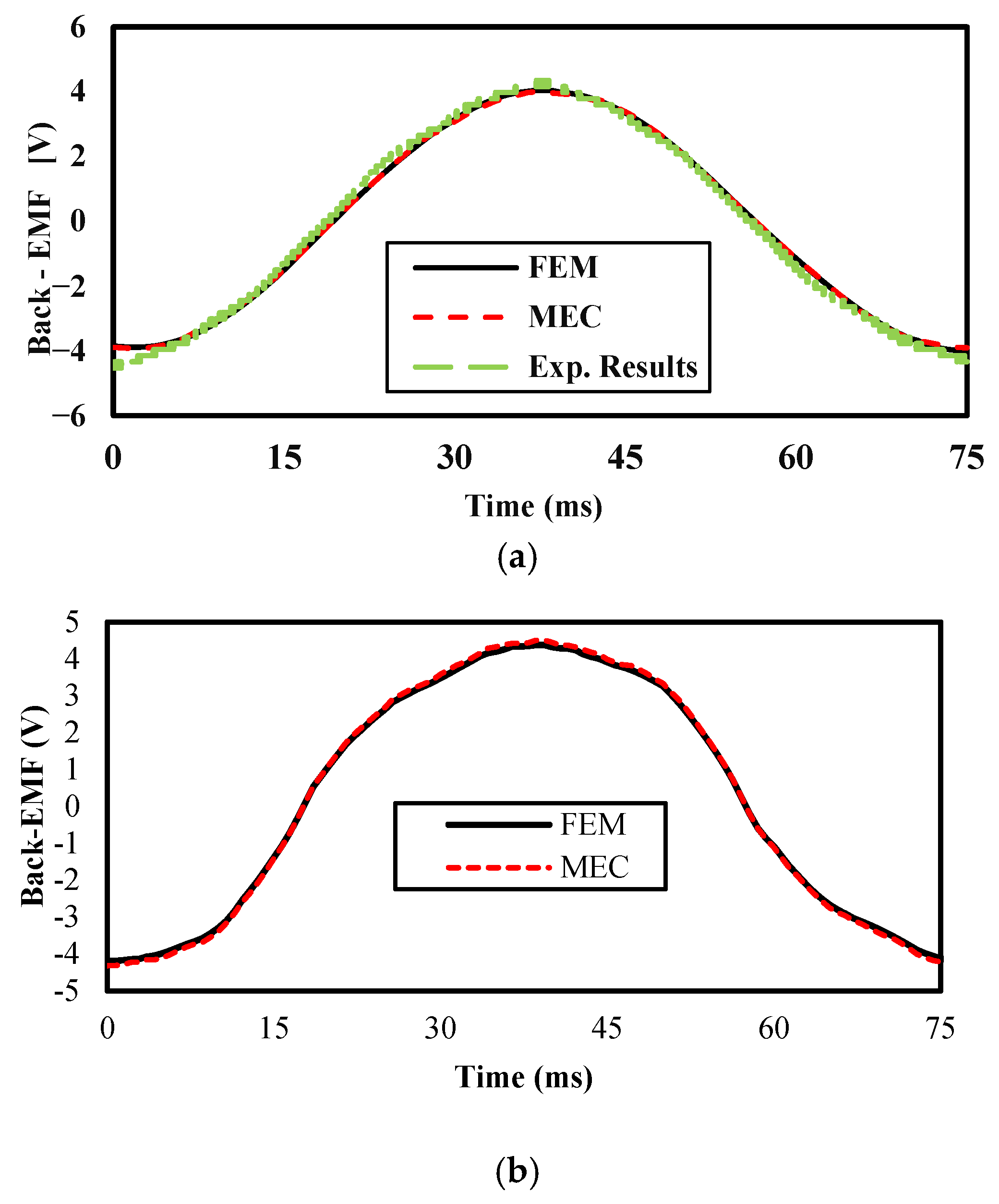
3.2. Back-EMF
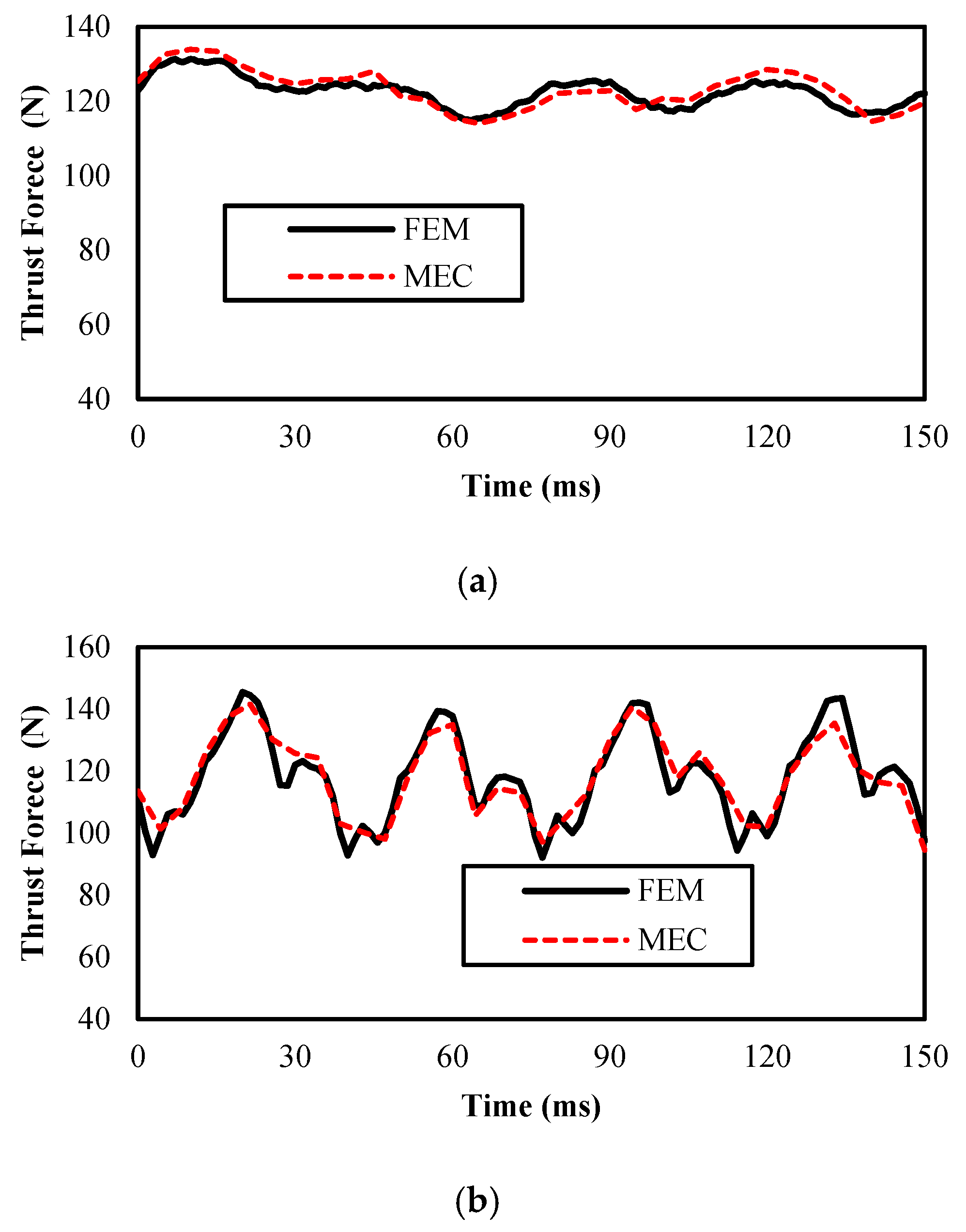
3.3. Electromagnetic and Detent Force
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rahideh, A.; Ghaffari, A.; Barzegar, A.; Mahmoudi, A. Analytical model of slotless brushless PM linear motors considering different magnetization patterns. IEEE Trans. Energy Convers. 2018, 33, 1797–1804. [Google Scholar] [CrossRef]
- Hu, H.; Zhao, J.; Liu, X.; Guo, Y. Magnetic Field and Force Calculation in Linear Permanent-Magnet Synchronous Machines Accounting for Longitudinal End Effect. IEEE Trans. Ind. Electron. 2016, 63, 7632–7643. [Google Scholar] [CrossRef]
- Wu, T.; Feng, Z.; Wu, C.; Lei, G.; Guo, Y.; Zhu, J.; Wang, X. Multiobjective Optimization of a Tubular Coreless LPMSM Based on Adaptive Multiobjective Black Hole Algorithm. IEEE Trans. Ind. Electron. 2020, 67, 3901–3910. [Google Scholar] [CrossRef]
- Sapmaz, T.; Oner, Y. Improved magnetic equivalent circuit for dual stator consequent pole permanent magnet machine. J. Magn. Magn. Mater. 2022, 550, 169039. [Google Scholar] [CrossRef]
- Solak, B.; Sapmaz, T.; Oner, Y. Non-linear analytical model for synchronous reluctance machine. J. Magn. Magn. Mater. 2023, 571, 170570. [Google Scholar] [CrossRef]
- Sapmaz, T.; Oner, Y. A novel hybrid model of electromagnetic performance for induction machine. Electr. Eng. 2022, 104, 3381–3390. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Cai, Y.; Lei, G.; Guo, Y.; Zhu, J. Driving-Cycle-Oriented Design Optimization of a Permanent Magnet Hub Motor Drive System for a Four-Wheel-Drive Electric Vehicle. Trans. Transp. Electrif. 2020, 6, 1115–1125. [Google Scholar] [CrossRef]
- Sun, X.; Xu, N.; Yao, M. Sequential Subspace Optimization Design of a Dual Three-Phase Permanent Magnet Synchronous Hub Motor Based on NSGA III. IEEE Trans. Transp. Electrif. 2023, 9, 622–630. [Google Scholar] [CrossRef]
- Jin, Z.; Sun, X.; Chen, L.; Yang, Z. Robust Multi-Objective Optimization of a 3-Pole Active Magnetic Bearing Based on Combined Curves with Climbing Algorithm. IEEE Trans. Ind. Electron. 2022, 69, 5491–5501. [Google Scholar] [CrossRef]
- Hu, H.; Liu, X.; Zhao, J.; Guo, Y. Analysis and minimization of detent end force in linear permanent magnet synchronous machines. IEEE Trans. Ind. Electron. 2018, 65, 2475–2486. [Google Scholar] [CrossRef]
- Ghaffari, A.; Rahideh, A.; Ghaffari, H.; Vahaj, A.; Mahmoudi, A. Comparison between 2-D and 0-D analytical models for slotless double-sided inner armature linear permanent magnet synchronous machines. Int. Trans. Electr. Energy Syst. 2020, 30, e12509. [Google Scholar] [CrossRef]
- Guo, R.; Yu, H.; Xia, T.; Shi, Z.; Zhong, W.; Liu, X. A Simplified Subdomain Analytical Model for the Design and Analysis of a Tubular Linear Permanent Magnet Oscillation Generator. IEEE Access 2018, 6, 42355–42367. [Google Scholar] [CrossRef]
- Amini, S.; Faiz, J. Performance analysis of linear permanent magnet Vernier machine using mixed subdomain and magnetic equivalent circuit techniques including end-effect. IET Electr. Power Appl. 2022, 16, 966–984. [Google Scholar] [CrossRef]
- Zhou, Y.; Wu, X. Analytical calculation of magnetic field of bearingless flux-switching permanent-magnet machine based on doubly-salient relative permeance method. IET Electr. Power Appl. 2020, 14, 872–884. [Google Scholar] [CrossRef]
- Devillers, E.; Le Besnerais, J.; Lubin, T.; Hecquet, M.; Lecointe, J.P. An Improved 2-D Subdomain Model of Squirrel-Cage Induction Machine Including Winding and Slotting Harmonics at Steady State. IEEE Trans. Magn. 2018, 54, 2. [Google Scholar] [CrossRef]
- Roshandel, E.; Mahmoudi, A.; Kahourzade, S.; Soong, W.L. Saturation Consideration in Modeling of the Induction Machine Using Subdomain Technique to Predict Performance. IEEE Trans. Ind. Appl. 2022, 58, 261–272. [Google Scholar] [CrossRef]
- Pourahmadi-Nakhli, M.; Rahideh, A.; Mardaneh, M. Analytical 2-D model of slotted brushless machines with cubic spoke-Type permanent magnets. IEEE Trans. Energy Convers. 2018, 33, 373–382. [Google Scholar] [CrossRef]
- Zhu, M.; Zeng, P.; Lou, X.; Mao, G.; Dou, Y.; He, Z. Analytical model of a dual-stator spoke-type permanent magnet synchronous machines accounting for tooth-tips. IET Electr. Power Appl. 2022, 16, 1117–1134. [Google Scholar] [CrossRef]
- Faradonbeh, V.Z.; Rahideh, A.; Markadeh, G.A. Analytical model for slotted stator brushless surface inset permanent magnet machines using virtual current theory. IET Electr. Power Appl. 2020, 14, 2750–2761. [Google Scholar] [CrossRef]
- Wu, L.J.; Zhu, Z.Q.; Staton, D.; Popescu, M.; Hawkins, D. Analytical prediction of electromagnetic performance of surface-mounted PM machines based on subdomain model accounting for tooth-tips. IET Electr. Power Appl. 2011, 5, 597–609. [Google Scholar] [CrossRef]
- Ghahfarokhi, M.M.; Faradonbeh, V.Z.; Amiri, E.; Bafrouei, S.M.M.; Aliabad, A.D.; Boroujeni, S.T. Computationally Efficient Analytical Model of Interior Permanent Magnet Machines Considering Stator Slotting Effects. IEEE Trans. Ind. Appl. 2022, 58, 4587–4601. [Google Scholar] [CrossRef]
- Chen, C.; Wu, X.; Yuan, X.; Ding, Z.; Zheng, X. Hybrid analytical model for air-gap magnetic field prediction of surface-mounted permanent magnet motors with a quasi-regular polygon rotor. IET Electr. Power Appl. 2023, 17, 1136–1147. [Google Scholar] [CrossRef]
- Wang, W.; Cheng, M. Analytical model of a fractional slot double-layer-winding vernier permanent magnet machine. IET Electr. Power Appl. 2023, 17, 293–305. [Google Scholar] [CrossRef]
- Vahaj, A.A.; Rahideh, A.; Zamani Faradonbeh, V.; Salehi, A.R.; Ghaffari, A.; Shahnazari, M.; Lubin, T. 2-D analytical magnetic model for optimal design of an outer rotor permanent magnet synchronous machine. IET Electr. Power Appl. 2023, 17, 1–13. [Google Scholar] [CrossRef]
- Hu, H.; Zhao, J.; Liu, X.; Guo, Y.; Zhu, J. No-Load Magnetic Field and Cogging Force Calculation in Linear Permanent-Magnet Synchronous Machines with Semiclosed Slots. IEEE Trans. Ind. Electron. 2017, 64, 5564–5575. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, M.; Zhang, Y.; Tuo, J.; Luo, S.; Xu, J. Analytical field model of segmented Halbach array permanent magnet machines considering iron nonlinearity. IET Electr. Power Appl. 2021, 15, 717–727. [Google Scholar] [CrossRef]
- Guo, B.; Du, Y.; Peng, F.; Huang, Y. Magnetic Field Calculation in Axial Flux Permanent Magnet Motor with Rotor Eccentricity. IEEE Trans. Magn. 2022, 58, 9. [Google Scholar] [CrossRef]
- Ilhan, E.; Motoasca, E.T.; Paulides, J.J.; Lomonova, E.A. Conformal mapping: Schwarz-Christoffel method for flux-switching PM machines. Math. Sci. 2012, 6, 37. [Google Scholar] [CrossRef]
- Xue, L.; Luo, L. Semi-Analytical Calculation of the Unsaturated Magnetic Field Distribution of a Slotted Spoke-Type Interior Permanent Magnet Machine with Conformal Mapping Method. IEEE Trans. Magn. 2022, 58, 5. [Google Scholar] [CrossRef]
- Zhou, Y.; Xue, Z. Analytical Method for Calculating the Magnetic Field of Spoke-Type Permanent Magnet Machines Accounting for Eccentric Magnetic Pole. IEEE Trans. Ind. Electron. 2021, 68, 2096–2107. [Google Scholar] [CrossRef]
- Boughrara, K.; Zarko, D.; Ibtiouen, R.; Touhami, O.; Rezzoug, A. Magnetic field analysis of inset and surface-mounted permanent-magnet synchronous motors using schwarz-christoffel transformation. IEEE Trans. Magn. 2009, 45, 3166–3178. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, J.; Xiao, Y.; Zhou, L.; Kang, H. Transfer learning-based surrogate-assisted design optimisation of a five-phase magnet-shaping PMSM. IET Electr. Power Appl. 2021, 15, 1281–1299. [Google Scholar] [CrossRef]
- Mirahki, H.; Moallem, M.; Ebrahimi, M.; Fahimi, B. Combined ON/OFF and conformal mapping method for magnet shape optimisation of SPMSM. IET Electr. Power Appl. 2018, 12, 1365–1370. [Google Scholar] [CrossRef]
- Ramakrishnan, K.; Zarko, D.; Hanic, A.; Mastinu, G. Improved method for field analysis of surface permanent magnet machines using Schwarz-Christoffel transformation. IET Electr. Power Appl. 2017, 11, 1067–1075. [Google Scholar] [CrossRef]
- Ramakrishnan, K.; Curti, M.; Zarko, D.; Mastinu, G.; Paulides, J.J.H.; Lomonova, E.A. Comparative analysis of various methods for modelling surface permanent magnet machines. IET Electr. Power Appl. 2017, 11, 540–547. [Google Scholar] [CrossRef]
- Taravat, S.; Kiyoumarsi, A.; Bracikowski, N. Mitigation of cogging torque in TFPM machines with flux concentrators and evaluation of the structures by using the SC method. IET Electr. Power Appl. 2020, 14, 552–560. [Google Scholar] [CrossRef]
- Anglada, J.R.; Sharkh, S.M. Analytical calculation of the torque produced by transverse flux machines. IET Electr. Power Appl. 2017, 11, 1298–1305. [Google Scholar] [CrossRef]
- Tessarolo, A. Modeling and analysis of synchronous reluctance machines with circular flux barriers through conformal mapping. IEEE Trans. Magn. 2015, 51, 4. [Google Scholar] [CrossRef]
- Ayat, Y.S.; Pahlavani, M.R.A. 3D computation of no-load magnetic flux density in slotless axial-flux permanent-magnet synchronous machines using conformal mapping. IET Electr. Power Appl. 2017, 11, 1391–1396. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, F.; Guo, B. Modelling and Research on a Laminated Tubular Linear Oscillating Generator for Free-piston Stirling Energy Conversion. IEEE Trans. Magn. 2022, 58, 9. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Y.; Lu, Q. An Accurate No-Load Analytical Model of Flat Linear Permanent Magnet Synchronous Machine Accounting for End Effects. IEEE Trans. Magn. 2023, 59, 1. [Google Scholar] [CrossRef]
- Naderi, P.; Heidary, M.; Vahedi, M. Performance analysis of ladder-secondary-linear induction motor with two different secondary types using Magnetic Equivalent Circuit. ISA Trans. 2020, 103, 355–365. [Google Scholar] [CrossRef] [PubMed]
- Jun, C.S.; Kwon, O.; Kwon, B., II. Sensitivity Comparison of Open-Circuit Airgap Flux between Surface-Mounted Permanent Magnet and Spoke-Type Permanent Magnet Machines Considering Manufacturing Tolerances. IEEE Access 2019, 7, 165908–165918. [Google Scholar] [CrossRef]
- Faradonbeh, V.Z.; Rahideh, A. 2-D analytical on-load electromagnetic model for double-layer slotted interior permanent magnet synchronous machines. IET Electr. Power Appl. 2022, 16, 394–406. [Google Scholar] [CrossRef]
- Luo, C.; Sun, J. Semi-interior permanent-magnet actuators for high-magnet-utilisation and low-cost applications. IET Electr. Power Appl. 2019, 13, 223–229. [Google Scholar] [CrossRef]
- Ilka, R.; Alinejad-Beromi, Y.; Yaghobi, H. Techno-economic design optimisation of an interior permanent-magnet synchronous motor by the multi-objective approach. IET Electr. Power Appl. 2018, 12, 972–978. [Google Scholar] [CrossRef]
- Mohammadi, S.; Mirsalim, M. Double-sided permanent-magnet radial-flux eddycurrent couplers: Three-dimensional analytical modelling, static and transient study, and sensitivity analysis. IET Electr. Power Appl. 2013, 7, 665–679. [Google Scholar] [CrossRef]
- Naderi, P. Magnetic-equivalent-circuit approach for inter-turn and demagnetisation faults analysis in surface mounted permanent-magnet synchronous machines using pole specific search-coil technique. IET Electr. Power Appl. 2018, 12, 916–928. [Google Scholar] [CrossRef]
- Davarpanah, G.; Mohammadi, S.; Lang, J.H.; Kirtley, J.L. Two-phase switched reluctance motor with hybrid excitation: Modeling and evaluation. IET Electr. Power Appl. 2023, 17, 939–951. [Google Scholar] [CrossRef]
- Ding, W.; Hu, Y.; Fu, H.; Chen, Q. Analysis and evaluation of modular E-shaped stator switched reluctance machines employing segmented and conventional rotor topologies. IET Electr. Power Appl. 2016, 10, 939–951. [Google Scholar] [CrossRef]
- Ghaffarpour, A.; Vatani, M.; Kondelaji, M.A.J.; Mirsalim, M. Analysis of linear permanent magnet switched reluctance motors with modular and segmental movers. IET Electr. Power Appl. 2023, 17, 756–772. [Google Scholar] [CrossRef]
- Sharouni, S.; Naderi, P.; Hedayati, M.; Hajihosseini, P. Performance analysis of a novel outer rotor flux-switching permanent magnet machine as motor/generator for vehicular and aircraft applications. IET Electr. Power Appl. 2021, 15, 243–254. [Google Scholar] [CrossRef]
- Ajamloo, A.M.; Ghaheri, A.; Shirzad, H.; Afjei, E. Non-linear analytical modelling and optimisation of a 12/8 rotor excited flux-switching machine. IET Electr. Power Appl. 2020, 14, 1592–1603. [Google Scholar] [CrossRef]
- Radmanesh, H.; Farmahini Farahani, E. Performance evaluation of a new modular split-tooth permanent magnet-assisted switched reluctance motor. IET Electr. Power Appl. 2023, 17, 441–451. [Google Scholar] [CrossRef]
- Nyitrai, A.; Kuczmann, M. Magnetic equivalent circuit and finite element modelling of anisotropic rotor axial flux permanent magnet synchronous motors with fractional slot distributed winding. IET Electr. Power Appl. 2023, 17, 709–720. [Google Scholar] [CrossRef]
- Ojaghlu, P.; Vahedi, A.; Totoonchian, F. Magnetic equivalent circuit modelling of ring winding axial flux machine. IET Electr. Power Appl. 2018, 12, 293–300. [Google Scholar] [CrossRef]
- Ghaheri, A.; Ajamloo, A.M.; Torkaman, H.; Afjei, E. Design, modelling and optimisation of a slotless axial flux permanent magnet generator for direct-drive wind turbine application. IET Electr. Power Appl. 2020, 14, 1291–1310. [Google Scholar] [CrossRef]
- Deshan, K.; Dazhi, W.; Wenhui, L.; Sihan, W.; Zhong, H. Analysis of a novel flux adjustable axial flux permanent magnet eddy current coupler. IET Electr. Power Appl. 2023, 17, 181–194. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Gao, S. 3-D magnetic equivalent circuit model for a coreless axial flux permanent-magnet synchronous generator. IET Electr. Power Appl. 2021, 15, 1261–1273. [Google Scholar] [CrossRef]
- Gao, H.; Zhang, Z.; Wang, C.; Geng, W.; Liu, Y. Analysis of end effect in ironless stator AFPM machine via MEC model. IET Electr. Power Appl. 2020, 14, 147–156. [Google Scholar] [CrossRef]
- Mohammadi, S.; Kirtley, J.; Azari, M.N. Modelling of axial-flux eddy-current couplers. IET Electr. Power Appl. 2020, 14, 1238–1246. [Google Scholar] [CrossRef]
- Naderi, P.; Sharouni, S.; Moradzadeh, M. Linear vernier machine wave converter modelling and analysis by MEC. IET Electr. Power Appl. 2020, 14, 751–761. [Google Scholar] [CrossRef]
- Krämer, C.; Kugi, A.; Kemmetmüller, W. Modeling of a permanent magnet linear synchronous motor using magnetic equivalent circuits. Mechatronics 2021, 76, 102558. [Google Scholar] [CrossRef]
- Niknafs, S.; Shiri, A.; Bagheri, S. Design and optimization of air-cored double-sided linear permanent magnet generators for wave energy conversion. Energy Sci. Eng. 2022, 10, 4481–4495. [Google Scholar] [CrossRef]
- Heidary, M.; Naderi, P.; Shiri, A. Modeling and analysis of a multi-segmented linear permanent-magnet synchronous machine using a parametric magnetic equivalent circuit. Electr. Eng. 2022, 104, 705–715. [Google Scholar] [CrossRef]
- Sheikh-Ghalavand, B.; Vaez-Zadeh, S.; Hassanpour Isfahani, A. An improved magnetic equivalent circuit model for iron-core linear permanent-magnet synchronous motors. IEEE Trans. Magn. 2010, 46, 112–120. [Google Scholar] [CrossRef]
- Ullah, W.; Khan, F.; Sulaiman, E.; Umair, M.; Ullah, N. 2-D analytical modelling of novel consequent pole linear permanent magnet flux switching machine. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 307. [Google Scholar] [CrossRef]
- Zouaghi, M.W.; Souissi, A.; Abdennadher, I.; Masmoudi, A. Position varying MEC-based investigation of the no-load operation of T-LPMSMs. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2015, 34, 1687–1702. [Google Scholar] [CrossRef]
- Vaez-Zadeh, S.; Isfahani, A.H. Enhanced modeling of linear permanent-magnet synchronous motors. IEEE Trans. Magn. 2007, 43, 33–39. [Google Scholar] [CrossRef]
- Souissi, A.; Zouaghi, M.W.; Abdennadher, I.; Masmoudi, A. MEC-based modeling and sizing of a tubular linear PM synchronous machine. IEEE Trans. Ind. Appl. 2015, 51, 2181–2194. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Literature | Saturation | Modeling Difficulty | Accuracy | Flux Leakage Model | Geometric Flexibility | MST |
|---|---|---|---|---|---|---|---|
| Subdomain | [6,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27] | No | Easy | High | Yes | No | Yes |
| Conformal mapping | [22,28,29,30,31,32,33,34,35,36,37,38,39] | No | Easy | Medium/ High | No | No | Yes |
| MEC | [42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63] except for [45] | Yes | Difficult | Low/Medium | No | Yes | No |
| MEC for linear PM machine | [62,63,64,65,66,67,68,69,70] | Yes | Moderate | Medium | No | Yes | No |
| Improved MEC | - | Yes | Moderate | High | Yes | Yes | Yes |
| Value [Unit] | |||||
|---|---|---|---|---|---|
| Item [Symbol] | Bread-Loaf | Surface | Item [Symbol] | Bread-Loaf | Surface |
| Rated power | 100 [W] | 8.26 [mm] | 6.25 [mm] | ||
| Rated speed | 0.7 [m/s] | Stator slot opening width | 14 [mm] | ||
| Number of stator slots [] | 7 | Stator slot width [] | 6.2 [mm] | 4 [mm] | |
| Number of poles | 13 | Stator slot opening height [] | 2.06 [mm] | ||
| Number of turns [] | 35 | 50 | Rotor width [] | 338 [mm] | |
| Stator width [] | 144 [mm] | 148 [mm] | Stator yoke width [] | 6 [mm] | 7 [mm] |
| Stator outer height [] | 47.25 [mm] | 42 [mm] | PM permeability | 1.05 | 1 |
| Stator yoke height [] | 39 [mm] | 35.75 [mm] | Remanence MFD | 1.23 [T] | 1 [T] |
| Stator tooth height [] | 6.25 [mm] | 13 [mm] | PM height max | 5 [mm] | |
| Stator tooth width [] | 7.67 [mm] | 7.7 [mm] | PM height min [] | 2 [mm] | 5 [mm] |
| Stator tooth thickness [] | 24.68 [mm] | 21 [mm] | PM width [] | 23 [mm] | |
| Stator slot opening width [] | 8.31 [mm] | 4 [mm] | Air-gap [] | 1.25 [mm] | 1 [mm] |
| Analyze Type | Machine Type | MEC | FEA |
|---|---|---|---|
| No-Load | Surface | 18 | 461 |
| Bread-Loaf | 18 | 680 | |
| On-Load | Surface | 25 | 572 |
| Bread-Loaf | 24 | 644 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turun, F.; Sapmaz, T.; Öner, Y.; Ali, S.; Marignetti, F. Non-Linear Analytical Model for Bread-Loaf Linear PM Motor. Energies 2025, 18, 3940. https://doi.org/10.3390/en18153940
Turun F, Sapmaz T, Öner Y, Ali S, Marignetti F. Non-Linear Analytical Model for Bread-Loaf Linear PM Motor. Energies. 2025; 18(15):3940. https://doi.org/10.3390/en18153940
Chicago/Turabian StyleTurun, Ferhat, Tunahan Sapmaz, Yasemin Öner, Salman Ali, and Fabrizio Marignetti. 2025. "Non-Linear Analytical Model for Bread-Loaf Linear PM Motor" Energies 18, no. 15: 3940. https://doi.org/10.3390/en18153940
APA StyleTurun, F., Sapmaz, T., Öner, Y., Ali, S., & Marignetti, F. (2025). Non-Linear Analytical Model for Bread-Loaf Linear PM Motor. Energies, 18(15), 3940. https://doi.org/10.3390/en18153940