

Fault Detection System for Smart City Distribution Networks: A Long Short-Term Memory-Based Approach
 ,
,  , and
, and
Abstract
1. Introduction
1.1. General Context
1.2. Literature Review
1.3. Paper Contributions
- Comprehensive consideration of operational scenarios: the proposed fault detection strategy explicitly accounts for key operational conditions, including topology changes, DER connection/disconnection, and MG operation modes (on-grid and off-grid), which are critical for the reliable operation of modern power systems;
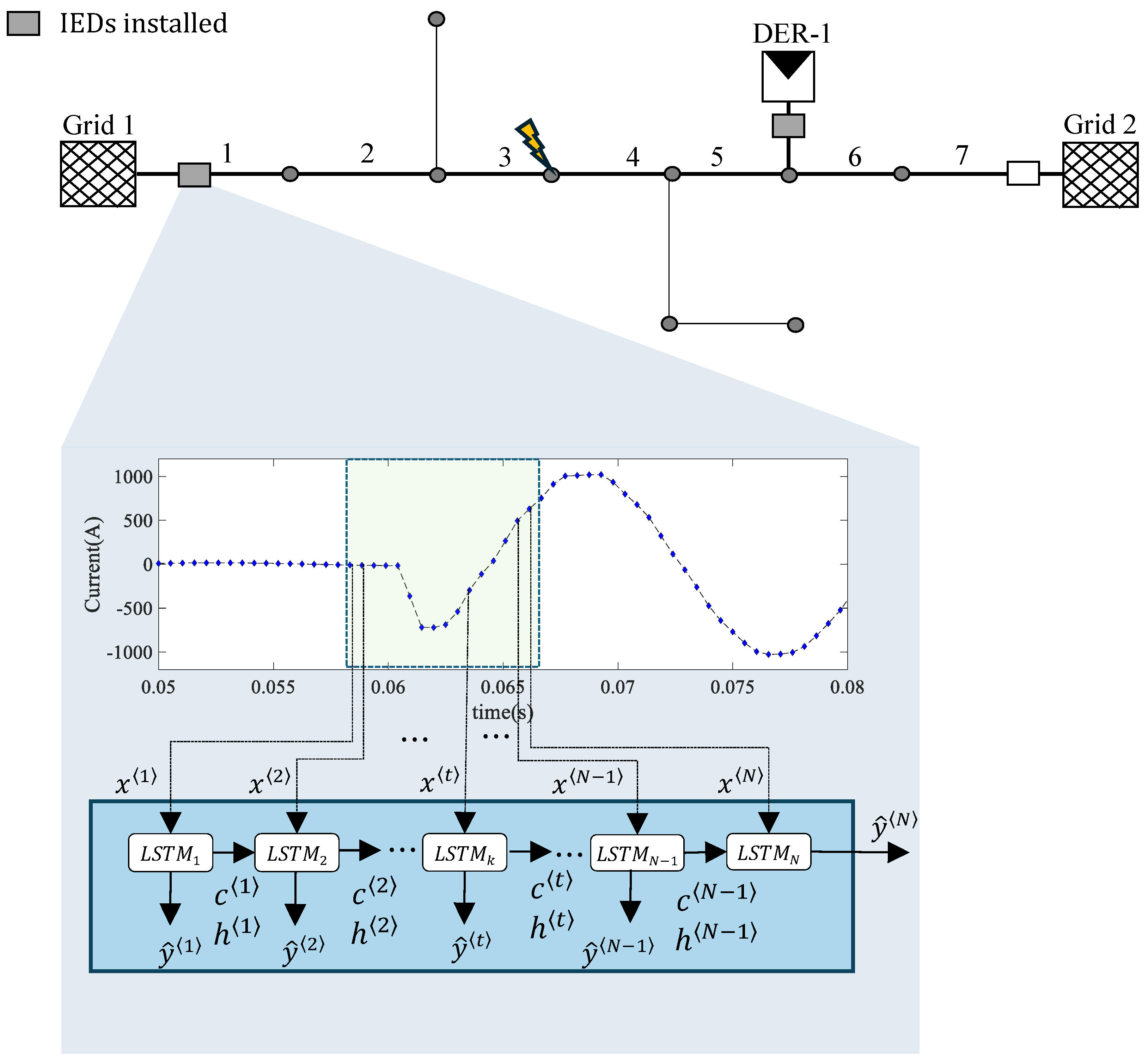
- Elimination of communication dependencies: by relying solely on instantaneous current measurements obtained locally by intelligent electronic devices (IEDs), the methodology removes the need for communication infrastructure and synchronization processes, thereby simplifying deployment and enhancing reliability;
- Automation of feature extraction: unlike conventional approaches, the use of LSTM networks enables automatic identification and optimization of the most relevant features for fault detection, bypassing labor-intensive preprocessing and feature engineering stages;
- Improved reliability-time trade-off: the strategy provides a robust balance between detection accuracy and response time, ensuring rapid and reliable fault identification tailored to the dynamic nature of SCDNs.
1.4. Paper Organization
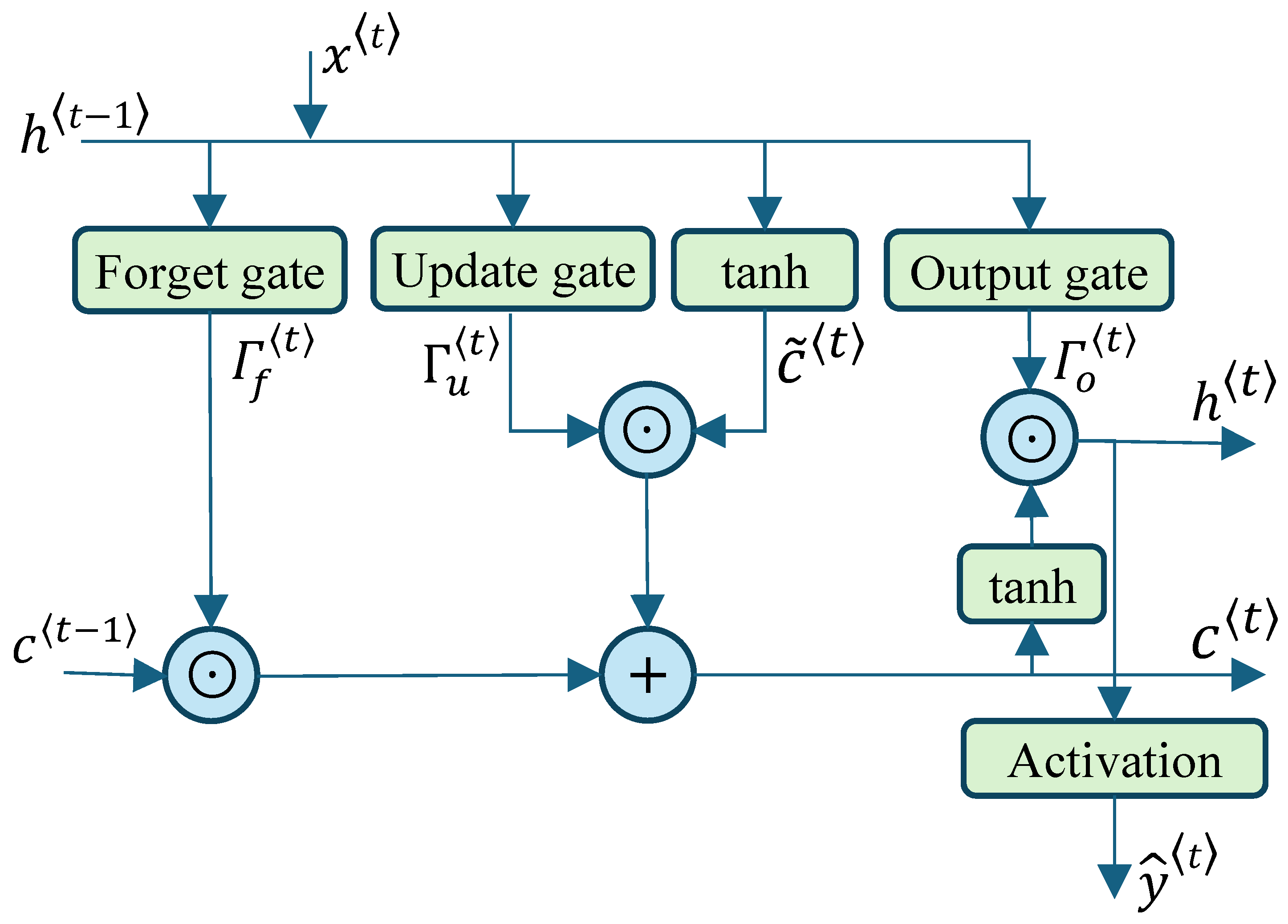
2. Long Short-Term Memory-Based Fault Detection Formulation
- Automatic feature discovery: LSTM networks autonomously identify higher-level features that maximize their performance without requiring human intervention [23];
- Long-term temporal dependency capture: LSTMs excel in retaining information over extended sequences, thanks to their memory mechanisms.
- The input gate () determines which new information should be added to the memory cell’s state;
- The forget gate () controls which information from the previous memory state should be retained or discarded;
- The output gate () decides which part of the cell state contributes to the output after passing through an activation function.
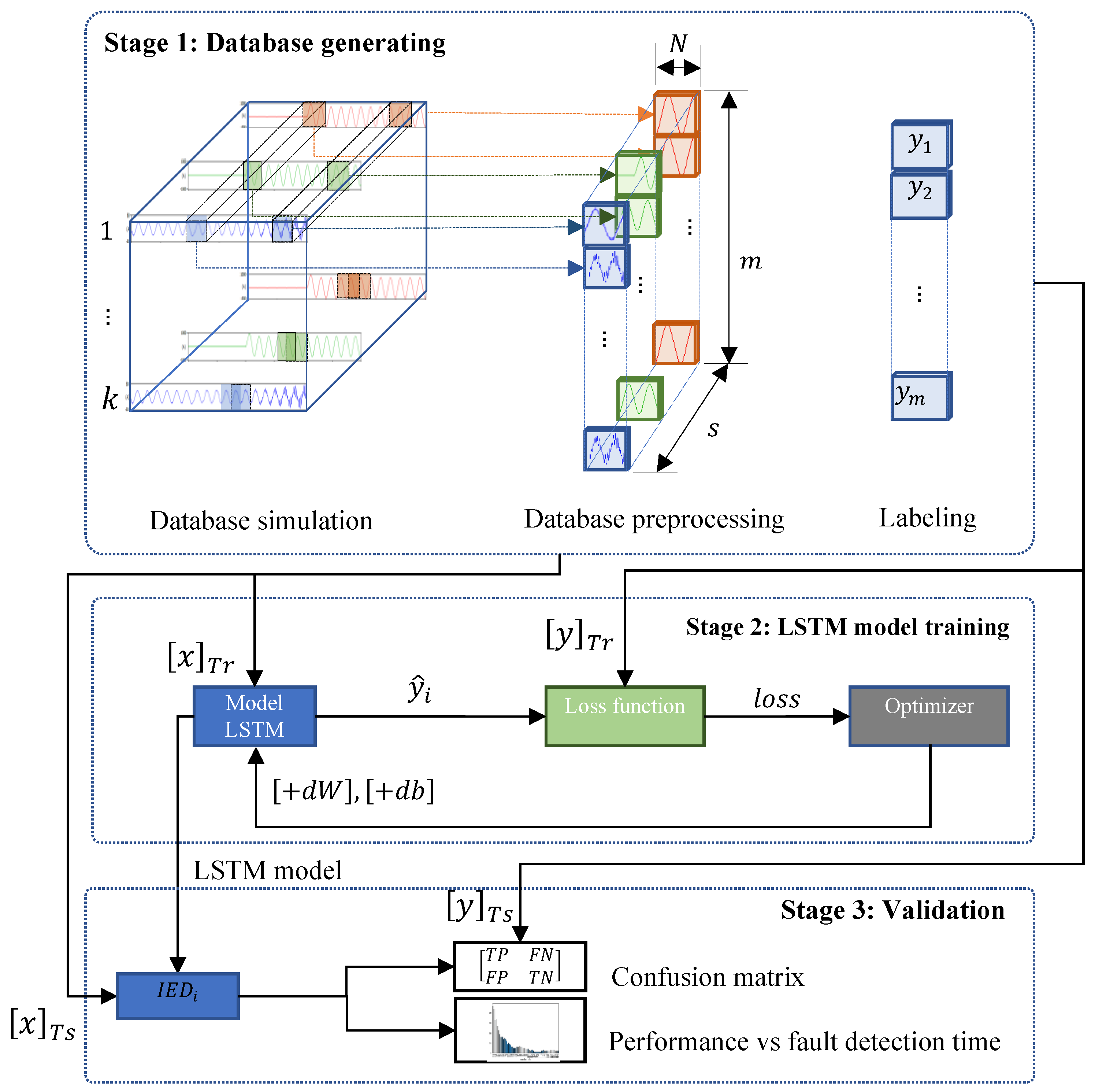
3. Long Short-Term Memory-Based Fault Detection Strategy
3.1. Database Generation
3.2. LSTM Model Training
3.3. Fault Detector Validation
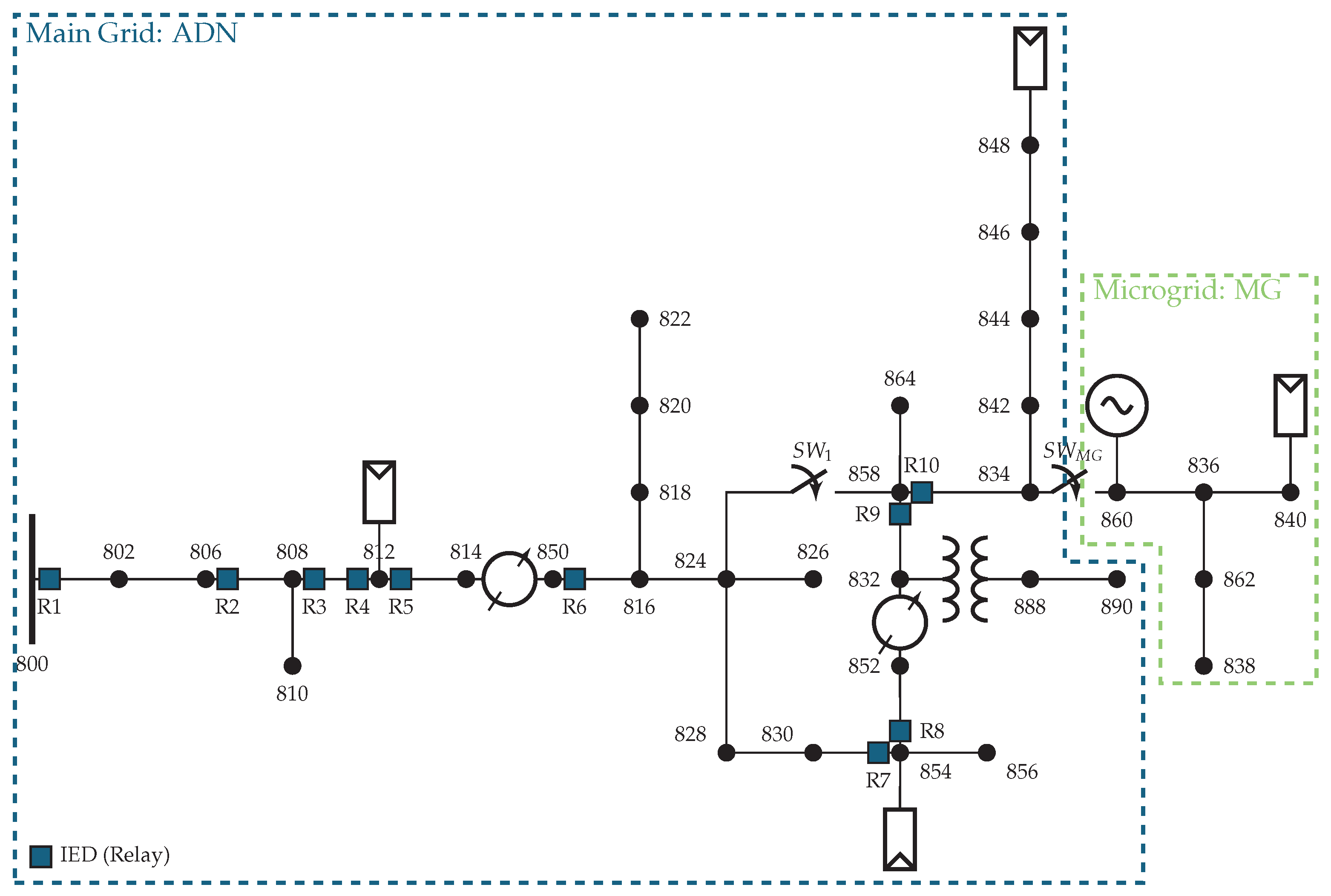
4. Case Study
5. Results and Discussion
5.1. Confusion Matrix Analysis
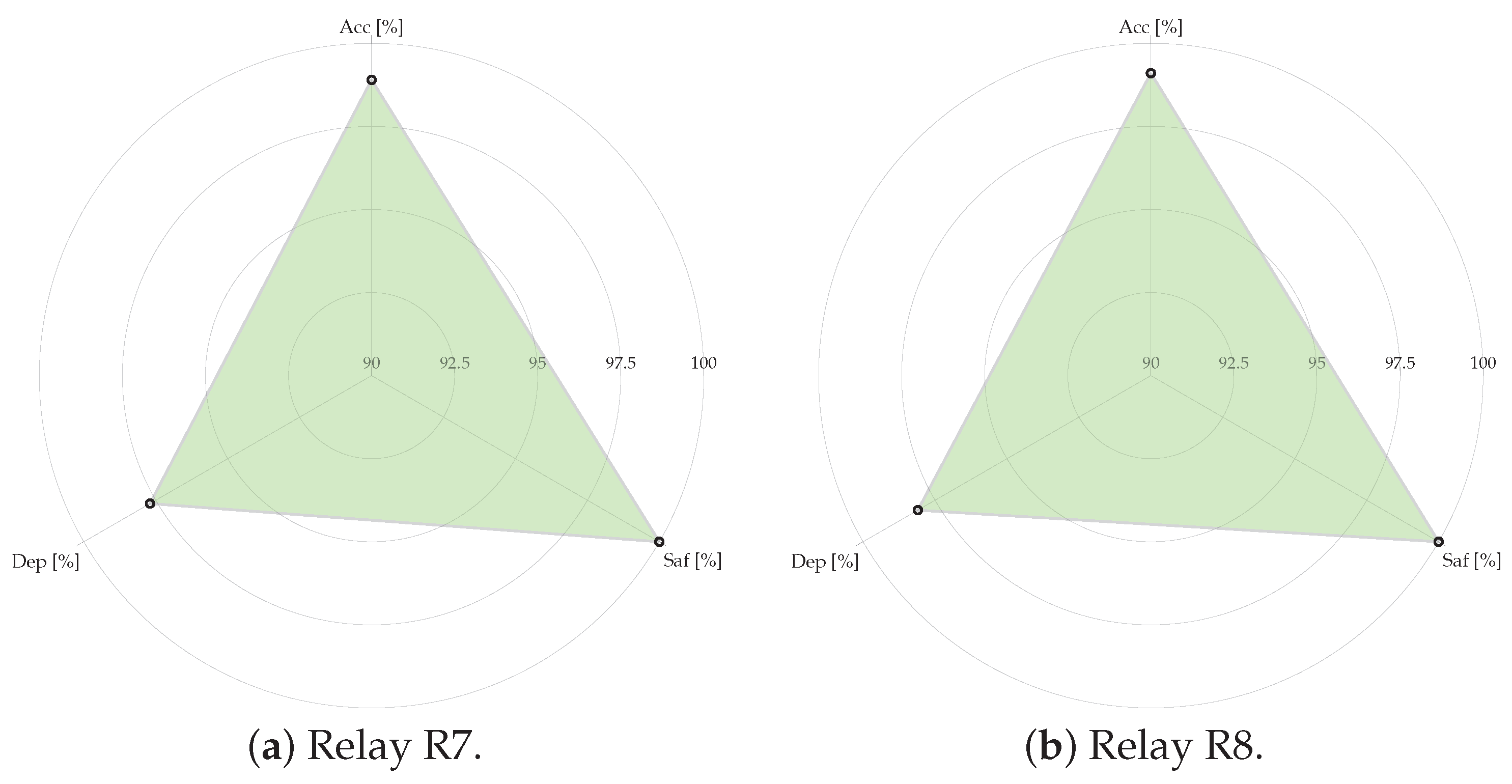
5.2. Performance Metric Analysis
- Figure 6 shows that relay R1 achieved perfect scores across all metrics, while R2 demonstrated strong performance with minor reductions in dependability;
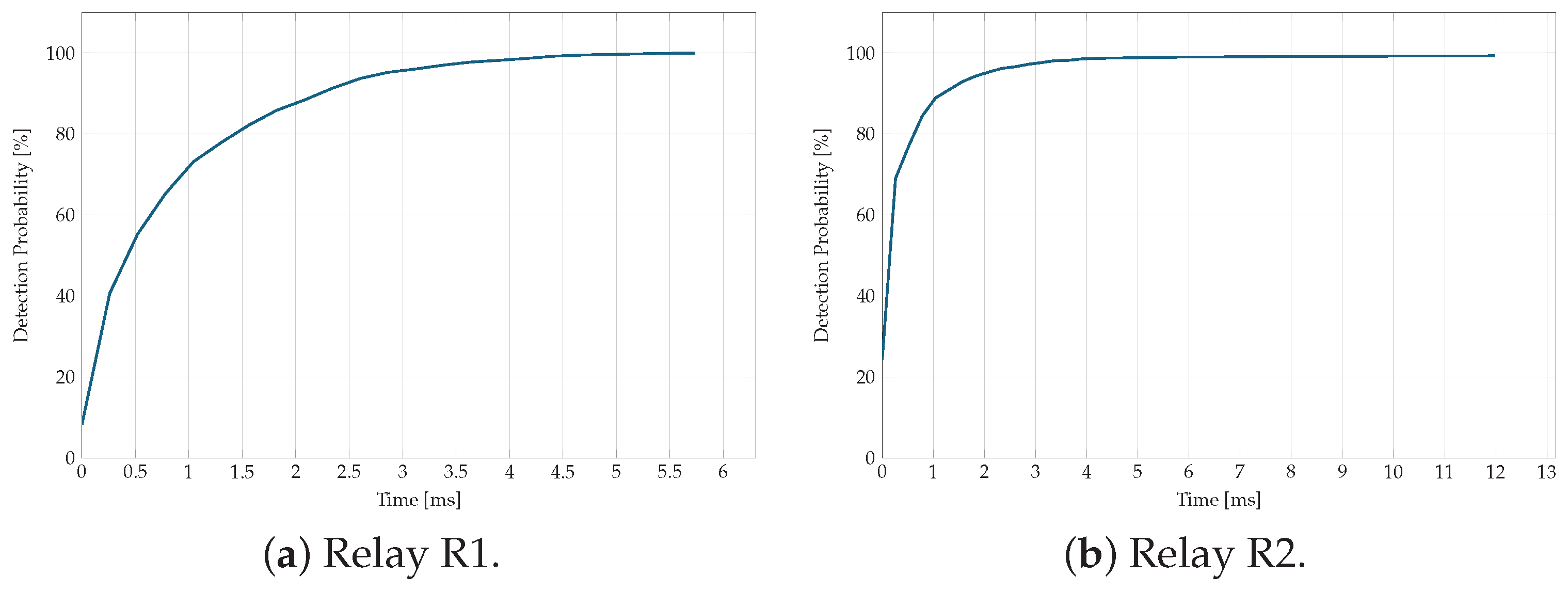
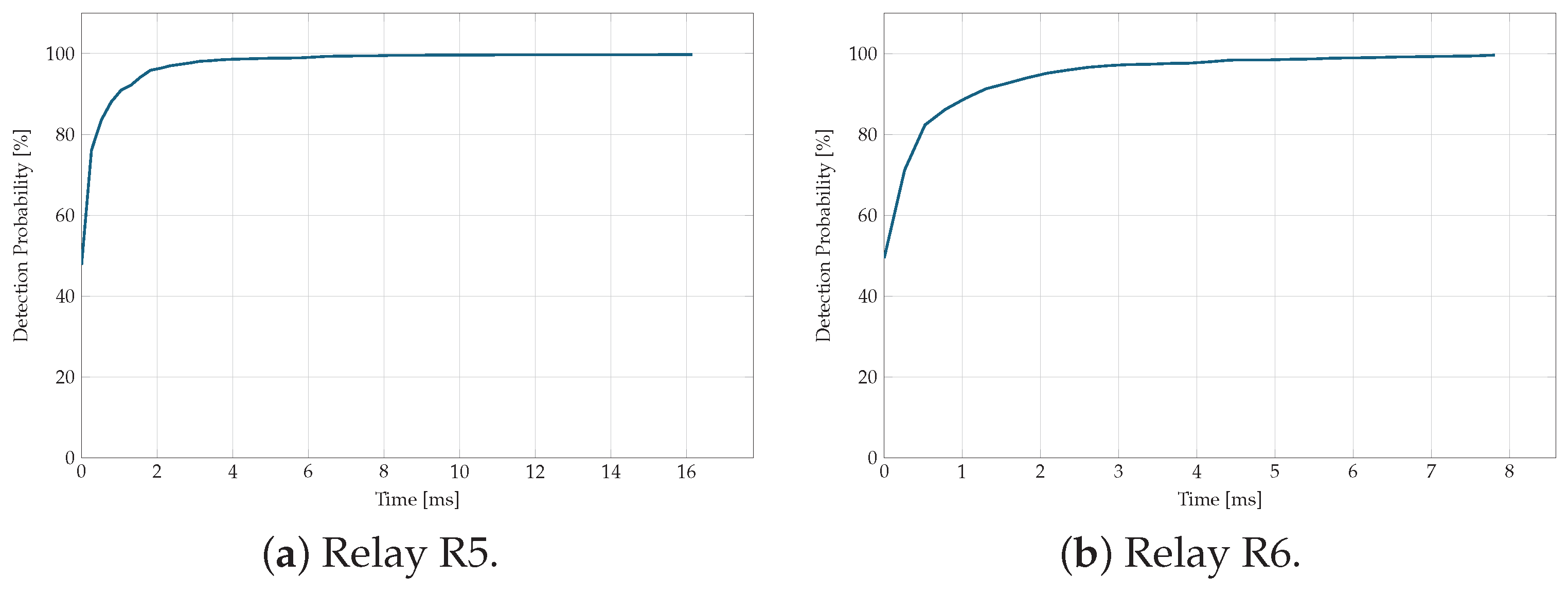
5.3. Detection Speed Analysis
5.4. Discussion on Fault Detection Trade-Offs
6. Conclusions, Limitations, and Perspectives
6.1. Summary and Key Contributions
6.2. Limitations and Future Work
- 1.
- Generality of trained models: the trained LSTM models are specific to the IEEE 34-node test feeder and its operational scenarios. Although fine-tuning could adapt these models to other networks, this requires further validation and testing in real-world ADNs;
- 2.
- High-impedance faults (HIF): The training dataset did not include high-impedance faults. As a result, the performance of the proposed strategy under such conditions remains untested. Future work should incorporate HIF scenarios to assess and potentially improve the method’s robustness in these cases;
- 3.
- Impact of model simplifications: The study assumed perfect and consistent signal acquisition at the IED level. Variations in real-world data quality, such as noise or signal distortion, may affect the detector’s performance. Further research should evaluate the strategy under such realistic conditions;
- 4.
- Scalability to larger systems: the application of this strategy to larger or more complex networks, with higher levels of DER integration or increased fault diversity, needs to be investigated to confirm scalability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cisco Systems. Distribution Automation—Secondary Substation Design Guide; Technical Report; Cisco Systems: San Jose, CA, USA, 2019; Available online: https://www.cisco.com/c/en/us/td/docs/solutions/Verticals/Distributed-Automation/Secondary-Substation/DG/DA-SS-DG.pdf (accessed on 23 October 2024).
- Omitaomu, O.A.; Niu, H. Artificial Intelligence Techniques in Smart Grid: A Survey. Smart Cities 2021, 4, 548–568. [Google Scholar] [CrossRef]
- Almihat, M.G.M.; Kahn, M.T.E.; Aboalez, K.; Almaktoof, A.M. Energy and Sustainable Development in Smart Cities: An Overview. Smart Cities 2022, 5, 1389–1408. [Google Scholar] [CrossRef]
- Shojaeiyan, S.; Dehghani, M.; Siano, P. Microgrids Resiliency Enhancement against Natural Catastrophes Based Multiple Cooperation of Water and Energy Hubs. Smart Cities 2023, 6, 1765–1785. [Google Scholar] [CrossRef]
- Bahramara, S.; Mazza, A.; Chicco, G.; Shafie-khah, M.; Catalão, J.P.S. Comprehensive review on the decision-making frameworks referring to the distribution network operation problem in the presence of distributed energy resources and microgrids. Int. J. Electr. Power Energy Syst. 2020, 115, 105466. [Google Scholar] [CrossRef]
- Hamanah, W.M.; Hossain, M.I.; Shafiullah, M.; Abido, M.A. AC Microgrid Protection Schemes: A Comprehensive Review. IEEE Access 2023, 11, 76842–76868. [Google Scholar] [CrossRef]
- ABB. Smart City Power Distribution; Technical Report; ABB, 2019. Available online: https://new.abb.com/docs/librariesprovider84/default-document-library/smart.pdf?sfvrsn=45a7c116_2 (accessed on 12 November 2024).
- Altaf, M.W.; Arif, M.T.; Islam, S.N.; Haque, M.E. Microgrid Protection Challenges and Mitigation Approaches—A Comprehensive Review. IEEE Access 2022, 10, 38895–38922. [Google Scholar] [CrossRef]
- Pothisarn, C.; Lertwanitrot, P.; Ngaopitakkul, A. A phase diagram approach to the detection and location of faulty capacitor units in A 115-kV capacitor bank based on unbalanced current arguments. Heliyon 2023, 9, e14589. [Google Scholar] [CrossRef]
- Li, C.; Wu, Q.; Zhang, L.; Shan, H.; Mai, Z.; Xu, X. Two-stage fault section location for distribution networks based on compressed sensing with estimated voltage measurements. Electr. Power Syst. Res. 2023, 223, 109702. [Google Scholar] [CrossRef]
- Sapountzoglou, N.; Lago, J.; De Schutter, B.; Raison, B. A generalizable and sensor-independent deep learning method for fault detection and location in low-voltage distribution grids. Appl. Energy 2020, 276, 115299. [Google Scholar] [CrossRef]
- Ajra, Y.; Hoblos, G.; Al Sheikh, H.; Moubayed, N. A Literature Review of Fault Detection and Diagnostic Methods in Three-Phase Voltage-Source Inverters. Machines 2024, 12, 631. [Google Scholar] [CrossRef]
- Yu, J.J.Q.; Hou, Y.; Lam, A.Y.S.; Li, V.O.K. Intelligent fault detection scheme for microgrids with wavelet-based deep neural networks. IEEE Trans. Smart Grid. 2019, 10, 1694–1703. [Google Scholar] [CrossRef]
- Kim, W.H.; Kim, J.Y.; Chae, W.K.; Kim, G.; Lee, C.K. LSTM-Based Fault Direction Estimation and Protection Coordination for Networked Distribution System. IEEE Access 2022, 10, 40348–40357. [Google Scholar] [CrossRef]
- Stanescu, D.; Digulescu, A.; Ioana, C.; Serbanescu, A. Transient power grid phenomena classification based on phase diagram features and machine learning classifiers. In Proceedings of the 2022 30th European Signal Processing Conference (EUSIPCO), Belgrade, Serbia, 29 August–2 September 2022; pp. 1676–1680. [Google Scholar] [CrossRef]
- Marín-Quintero, J.; Orozco-Henao, C.; Velez, J.C.; Bretas, A.S. Micro grids decentralized hybrid data-driven cuckoo search based adaptive protection model. Int. J. Electr. Power Energy Syst. 2021, 130, 106960. [Google Scholar] [CrossRef]
- Cepeda, C.; Orozco-Henao, C.; Percybrooks, W.; Pulgarín-Rivera, J.D.; Montoya, O.D.; Gil-González, W.; Vélez, J.C. Intelligent fault detection system for microgrids. Energies 2020, 13, 1223. [Google Scholar] [CrossRef]
- Reddy, O.Y.; Chatterjee, S.; Chakraborty, A.K.; Bhowmik, A.R. Fault detection and location estimation for LVDC microgrid using self-parametric measurements. Int. Trans. Electr. Energy Syst. 2020, 30, 1–13. [Google Scholar] [CrossRef]
- Rameshrao, A.G.; Koley, E.; Ghosh, S. A LSTM-based approach for detection of high impedance faults in hybrid microgrid with immunity against weather intermittency and N-1 contingency. Renew. Energy 2022, 198, 75–90. [Google Scholar] [CrossRef]
- Aqamohammadi, A.R.; Niknam, T.; Shojaeiyan, S.; Siano, P.; Dehghani, M. Deep Neural Network with Hilbert–Huang Transform for Smart Fault Detection in Microgrid. Electronics 2023, 12, 499. [Google Scholar] [CrossRef]
- Roy, B.; Adhikari, S.; Datta, S.; Devi, K.J.; Devi, A.D.; Alsaif, F. Deep Learning Based Relay for Online Fault Detection, Classification, and Fault Location in a Grid-Connected Microgrid. IEEE Access 2023, 11, 62674–62696. [Google Scholar] [CrossRef]
- Marín-Quintero, J.; Orozco-Henao, C.; Percybrooks, W.S.; Vélez, J.C.; Montoya, O.D.; Gil-González, W. Toward an adaptive protection scheme in active distribution networks: Intelligent approach fault detector. Appl. Soft Comput. 2020, 98, 106839. [Google Scholar] [CrossRef]
- Ozcanli, A.K.; Baysal, M. Islanding detection in microgrid using deep learning based on 1D CNN and CNN-LSTM networks. Sustain. Energy Grids Netw. 2022, 32, 100839. [Google Scholar] [CrossRef]
- Bengio, Y. Practical Recommendations for Gradient-Based Training of Deep Architectures. In Neural Networks: Tricks of the Trade, 2nd ed.; Montavon, G., Orr, G.B., Müller, K.R., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 437–478. [Google Scholar] [CrossRef]
- Hor, C.L.; Crossley, P.A. Knowledge extraction from intelligent electronic devices. In Transactions on Rough Sets III; Springer: Berlin/Heidelberg, Germany, 2005; pp. 82–111. [Google Scholar]
- Shahin, M.A.; Holger, M.R.; Jaksa, M.B. Data Division for Developing Neural Networks Applied to Geotechnical Engineering. J. Comput. Civ. Eng. 2004, 8, 105–114. [Google Scholar] [CrossRef]
- Sak, H.; Senior, A.; Beaufays, F. Long Short-Term Memory Based Recurrent Neural Network Architectures for Large Vocabulary Speech Recognition. arXiv 2014, arXiv:1402.1128. [Google Scholar]
- Mao, A.; Mohri, M.; Zhong, Y. Cross-Entropy Loss Functions: Theoretical Analysis and Applications. arXiv 2023, arXiv:2304.07288. [Google Scholar]
- Kingma, D.P.; Ba, J. ADAM: A method for stochastic optimization. arXiv 2015, arXiv:1412.6980. [Google Scholar]
- Institute of Electrical and Electronics Engineers (IEEE). IEEE standard dictionary of electrical and electronics terms. IEEE Trans. Power Appar. Syst. 1980, PAS-99, 37a. [Google Scholar] [CrossRef]
- Phadke, A.G.; Horowitz, S.H. Power System Relaying; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- IEEE Power and Energy Society. IEEE 34 Node Test Feeder. IEEE Power and Energy Society: Piscataway, NJ, USA, 2010. Available online: https://cmte.ieee.org/pes-testfeeders/resources/ (accessed on 23 March 2024).
- Hoidalen, H.K. ATPDraw Windows Version 7.2; NTNU: Trondheim, Norway, 2020; Available online: https://www.atpdraw.net/ (accessed on 23 March 2025).
- Plet, C.A.; Green, T.C. Fault response of inverter interfaced distributed generators in grid-connected applications. Electr. Power Syst. Res. 2014, 106, 21–28. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspects Considered | Reviewed Methods and References | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| [13] | [11] | [16] | [22] | [17] | [18] | [19] | [20] | [21] | [14] | PM 1 | |
| Network-Related Aspects | |||||||||||
| MG Mode (On/Off-Grid) | ✓ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ | ✓ | ✓ | ✗ | ✓ |
| Network Reconfiguration | ✓ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ |
| Unbalance | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ | ✓ | ✗ | ✗ | ✓ |
| Load Variability | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ | ✓ |
| DER Status (Conn./Disc.) | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ |
| Comprehensive Fault Coverage | ✓ | ✗ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ |
| Communication and Performance Aspects | |||||||||||
| Communication-Free Approach | ✓ | ✓ | ✓ | ✓ | ✓ | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ |
| No Feature Selection Required | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Reliability-Time Trade-Off | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ |
| Group | Factor | Levels |
|---|---|---|
| No-fault operation | Load change | High (120–90%), mid (90–60%), low (60–30%). Change by ±5% from its initial value |
| Topology change | Reconfiguration—section cut off—off grid | |
| Cut off generation | At least one DG to time | |
| Capacitor switching | At least one to time | |
| Operation mode microgrid | On-grid/off-grid | |
| Fault operation | Type of fault | Single-phase faults, double-phase faults, double-phase-to-ground faults and three-phase faults |
| Fault location | Overall distribution lines | |
| Fault resistance | 0 to 100 | |
| Fault location over line section | 0% to 50% |
| Prediction | ||||
|---|---|---|---|---|
| Positive | Negative | Total | ||
| Label | Positive | True positive (TP) | False negative (FN) | TP + FN |
| Negative | False positive (FP) | True negative (TN) | FP + TN | |
| Total | TP + FP | FN + TN | ||
| Parameter | CIDER-1 | CIDER-2 | CIDER-3 | CIDER-4 |
|---|---|---|---|---|
| [kW] | 200 | 100 | 100 | 100 |
| [V] | 400 | 400 | 400 | 400 |
| f [Hz] | 60 | 60 | 60 | 60 |
| [pu] | 1.6 | 1.6 | 1.6 | 1.6 |
| [pu] | 2.0 | 2.0 | 2.0 | 2.0 |
| Group | Factor | Level | Scenarios |
|---|---|---|---|
| No-fault operation | Load change by from its initial value | High (120–90%) | 8778 |
| Medium (90–60%) | |||
| Low (60–30%) | |||
| Fault operation | Type of fault | Single-phase faults | 8778 |
| Double-phase faults | |||
| Double-phase-to-ground faults | |||
| Three-phase faults | |||
| Fault location | Three-phase nodes (32 nodes) | ||
| Fault resistance | 0 to 50 in steps of 10 |
| True label | Predicted Label | ||||||
| Relay R1 | Relay R2 | Relay R3 | |||||
| Fault | No Fault | Fault | No Fault | Fault | No Fault | ||
| Fault | 1452 | 0 | 1442 | 10 | 1445 | 7 | |
| No Fault | 0 | 1548 | 0 | 1548 | 0 | 1548 | |
| True label | Predicted Label | ||||||
| Relay R4 | Relay R5 | Relay R6 | |||||
| Fault | No Fault | Fault | No Fault | Fault | No Fault | ||
| Fault | 1444 | 8 | 1448 | 4 | 1447 | 5 | |
| No Fault | 0 | 1548 | 0 | 1548 | 0 | 1548 | |
| True label | Predicted Label | ||||
| Relay R7 | Relay R8 | ||||
| Fault | No Fault | Fault | No Fault | ||
| Fault | 1419 | 33 | 1425 | 27 | |
| No Fault | 0 | 1548 | 0 | 1548 | |
| True label | Predicted Label | ||||
| Relay R9 | Relay R10 | ||||
| Fault | No Fault | Fault | No Fault | ||
| Fault | 1400 | 52 | 1394 | 58 | |
| No Fault | 0 | 1548 | 0 | 1548 | |
| Relay | Accuracy [%] | Dependability [%] | Safety [%] |
|---|---|---|---|
| R1 | 100.0 | 100.0 | 100.0 |
| R2 | 99.7 | 99.3 | 100.0 |
| R3 | 99.8 | 99.5 | 100.0 |
| R4 | 99.7 | 99.4 | 100.0 |
| R5 | 99.9 | 99.7 | 100.0 |
| R6 | 99.8 | 99.7 | 100.0 |
| R7 | 98.9 | 97.7 | 100.0 |
| R8 | 99.1 | 98.1 | 100.0 |
| R9 | 98.3 | 96.4 | 100.0 |
| R10 | 98.1 | 96.0 | 100.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Herrada, A.; Orozco-Henao, C.; Pulgarín Rivera, J.D.; Mora-Flórez, J.; Marín-Quintero, J. Fault Detection System for Smart City Distribution Networks: A Long Short-Term Memory-Based Approach. Energies 2025, 18, 3453. https://doi.org/10.3390/en18133453
Herrada A, Orozco-Henao C, Pulgarín Rivera JD, Mora-Flórez J, Marín-Quintero J. Fault Detection System for Smart City Distribution Networks: A Long Short-Term Memory-Based Approach. Energies. 2025; 18(13):3453. https://doi.org/10.3390/en18133453
Chicago/Turabian StyleHerrada, A., C. Orozco-Henao, Juan Diego Pulgarín Rivera, J. Mora-Flórez, and J. Marín-Quintero. 2025. "Fault Detection System for Smart City Distribution Networks: A Long Short-Term Memory-Based Approach" Energies 18, no. 13: 3453. https://doi.org/10.3390/en18133453
APA StyleHerrada, A., Orozco-Henao, C., Pulgarín Rivera, J. D., Mora-Flórez, J., & Marín-Quintero, J. (2025). Fault Detection System for Smart City Distribution Networks: A Long Short-Term Memory-Based Approach. Energies, 18(13), 3453. https://doi.org/10.3390/en18133453