
A Scalable Data-Driven Surrogate Model for 3D Dynamic Wind Farm Wake Prediction Using Physics-Inspired Neural Networks and Wind Box Decomposition


Abstract
1. Introduction
1.1. Background and Motivation
1.2. Literature Review and Research Gap
1.3. Physics-Informed Neural Networks in Energy Systems
1.4. Contributions and Paper Organization
- Physics-inspired neural network architecture: A novel NN architecture for dynamic wake prediction is proposed that leverages an autoencoder (AE) structure. The encoder maps the high-dimensional 3D flow field to a low-dimensional latent space, where simpler dynamics are learned to predict the temporal evolution. The decoder reconstructs the full flow field from the latent state. This design is inspired by the time–space structure of the Navier–Stokes equations, where complex spatial dependencies are coupled with temporal evolution, aiming to facilitate learning and potentially improve interpretability by separating these concerns.
- Scalable wind box decomposition: To handle large wind farms without requiring monolithic simulations, a “wind box” methodology based on domain decomposition is introduced. The farm domain is decomposed into smaller, canonical subdomains (boxes) containing either a single turbine or no turbine. Separate NN surrogate models are trained for each box type using data from these smaller, standardized configurations. These models can then be stitched together, exchanging information at their boundaries, to simulate the wake propagation across arbitrary farm layouts, significantly reducing data generation requirements and enhancing model versatility compared to training on specific large layouts.
- Efficient data generation pipeline: An efficient general-purpose batch simulation tool for SOWFA, including containerized deployment (Docker 19.03.12), Python 3.9.5 APIs for parameter control and workflow management, and automated post-processing using ParaView, was developed and implemented, enabling the efficient generation of the large datasets required for NN training from multiple SOWFA runs.
- Comprehensive validation: The proposed surrogate model is validated against SOWFA simulations for both single-turbine and multi-turbine (two-turbine via three wind boxes) scenarios under varying inflow conditions and turbine yaw angles. High accuracy in predicting the 3D velocity field dynamics is demonstrated, and the significant computational acceleration achieved is quantified, illustrating its potential for real-time applications.
2. Problem Formulation and Governing Equations
2.1. Governing Physics: Navier–Stokes Equations
2.2. Challenges and Surrogate Modeling Goal
- Computational cost: High-resolution requirements for capturing turbulent eddies and small time steps lead to extremely long simulation times.
- Complexity: Nonlinearity, turbulence, and tight coupling between velocity and pressure make the equations difficult to solve rapidly.
- Scalability: Computational cost increases dramatically with the size of the wind farm (number of turbines and domain volume), often super-linearly.
- is the discretized state vector representing the flow field (e.g., velocity components on a grid) within a specific wind box at time t.
- represents the turbine control parameters (like yaw angle) relevant to the specific box at time t. For an empty box, this is null.
- represents the inflow and boundary conditions influencing the specific box at time t. In the wind box decomposition, this is primarily the flow field information from adjacent upstream boxes.
- is the surrogate model’s prediction for the state of the box at time .
- represents the trainable parameters (weights and biases) of the neural network .
3. Methodology
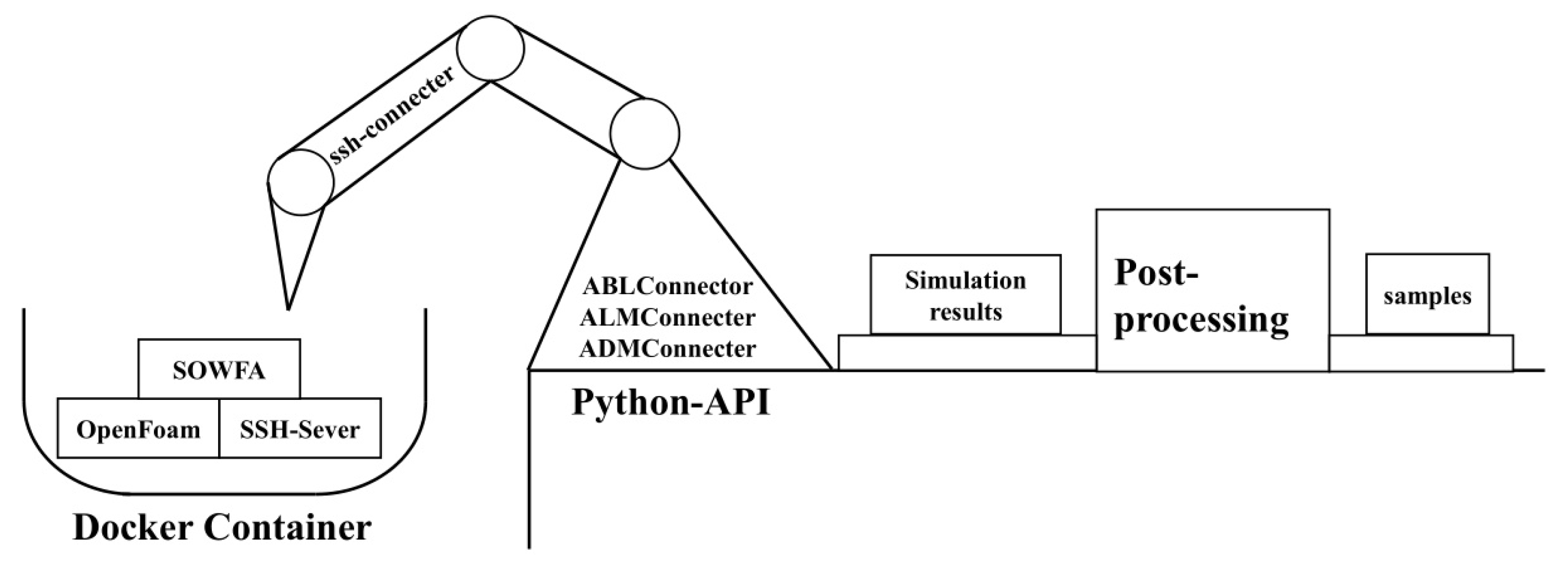
3.1. SOWFA Batch Simulation and Data Processing Tool
- Containerized SOWFA environment: Docker was utilized to create a portable SOWFA image containing all necessary dependencies (OpenFOAM, SOWFA source, compilers, etc.). This eliminates complex installations and ensures reproducibility across different computing environments. An SSH server was configured within the container for remote access and control.
- Python API for simulation management: A Python API was developed to interact with the SOWFA container via SSH. This API provides high-level functions to
- Configure simulation parameters (e.g., wind speed, direction, turbine yaw/pitch angles, simulation time, mesh settings, and turbulence model parameters) by editing SOWFA input files based on templates. Examples of configurable parameters include mean wind speed, hub height, turbulence characteristics for ABL simulation, turbine rotor diameter, thrust and power curves, initial yaw angle, and dynamic yaw setpoints. The API includes basic validation checks for parameter ranges.
- Manage the two-stage SOWFA simulation workflow for wind farm simulations using the actuator disk model (ADM):
- -
- ABL simulation: Simulate the atmospheric boundary layer (ABL) without turbines to generate realistic turbulent inflow conditions using LES with dynamic subgrid-scale models. The API handles setup, execution (‘ABLConnector’), and the extraction of time-varying boundary data for subsequent turbine simulations.
- -
- Turbine simulation: Introduce turbines (using ADM) into the pre-computed ABL flow and simulate the wake generation and propagation. The API (‘ADMConnector’) manages case setup based on ABL results and turbine parameters, execution, and basic checks.
- Orchestrate batch simulations by iterating through different parameter combinations (e.g., varying mean wind speeds, yaw angles, and initial ABL states).
- Automated post-processing: The Python interface of ParaView was leveraged. Python scripts were developed to automatically:
- Load simulation results from multiple cases.
- Extract relevant data, such as the 3D velocity field () at specific time steps within defined regions (corresponding to wind boxes).
- Sample the data onto a regular grid matching the desired NN input/output resolution.
- Export the processed data into a format suitable for NN training (e.g., NumPy ‘.npy’ files).
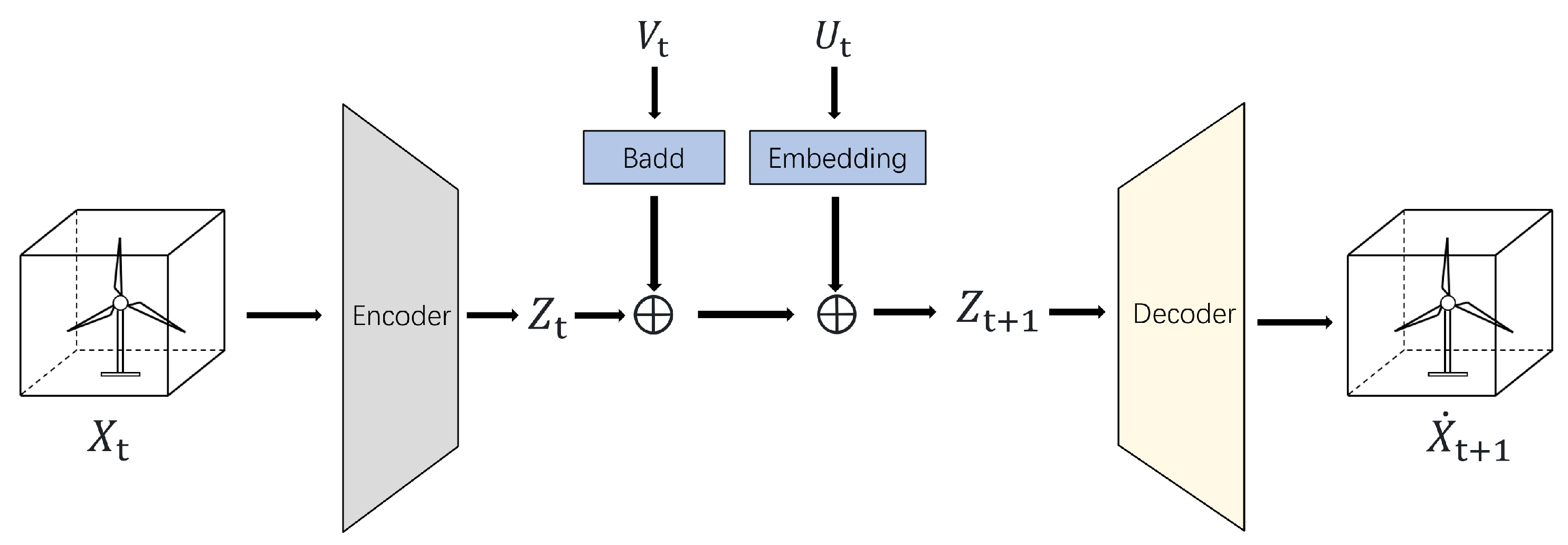
3.2. Physics-Inspired Neural Network Architecture
- Encoder (E): Maps the high-dimensional input state (the 3D velocity field on a grid within a wind box) to a low-dimensional latent vector . This is implemented using 3D convolutional neural networks (CNNs) which are effective at capturing spatial hierarchies and patterns in volumetric data. The encoder compresses the essential spatial information of the flow field into , where is the dimension of the latent space (). A typical encoder structure involves several 3D convolutional layers with an increasing number of filters and pooling operations (e.g., max pooling or strided convolutions) to reduce spatial dimensions, followed by flattening and fully connected layers to produce the latent vector.
- Latent dynamics model (): Predicts the latent state at the next time step, . This module takes the current latent state , the turbine controls (if applicable), and processed boundary/inflow information as input. It is implemented using fully connected layers (MLPs). The hypothesis is that the dynamics in the learned latent space are simpler and more predictable than in the original high-dimensional space, potentially approximating an ordinary differential equation (ODE) system . A specific loss term (, see Section 3.4) encourages smooth evolution in the latent space.
- Decoder (D): Reconstructs the full-dimensional state prediction from the predicted latent state. This is implemented using 3D Transposed Convolutional Neural Networks (TCNNs), effectively reversing the operations of the encoder to generate the 3D velocity field grid. A typical decoder structure mirrors the encoder, using transposed convolutional layers and upsampling to increase spatial dimensions, culminating in a layer that outputs the desired grid size.
3.3. Wind Box Decomposition for Scalability
- Turbine wind box (): A box containing a single wind turbine centered within it. The NN model for this box () is trained to predict the flow evolution considering the turbine’s presence and its operating parameters (), based on uniform or pre-calculated non-uniform inflow ().
- Empty wind box (): A box located in a region without a turbine, primarily responsible for modeling wake propagation and recovery. Its NN model () is trained to predict the flow evolution based on its upstream inflow conditions (). The governing N-S equations simplify as the turbine force term is zero in this region, although turbulent stresses remain.
- Reduced data generation cost: SOWFA simulations are only needed for the smaller, canonical wind box configurations, rather than for every potential large farm layout. This drastically reduces the computational resources and time required for data generation.
- Scalability: Simulating large farms involves stitching together predictions from multiple smaller, fast NN models running in parallel or sequence, which is computationally much cheaper than a monolithic large-scale CFD or NN model. The total computational cost scales roughly linearly with the number of boxes.
- Versatility/generalization: Arbitrary farm layouts and potentially different turbine types (by training specific models) can potentially be assembled using the pre-trained canonical box models, enhancing the model’s applicability to diverse farm designs, provided that the canonical training data cover the relevant inflow conditions and turbine states.
3.4. Training Procedure
- : The primary prediction loss, measuring the difference between the predicted state , and the true SOWFA state . The mean squared error (MSE) of the velocity components is used:where and denotes the squared L2 norm (sum of squared differences) over all grid points and velocity components within the box.
- : The reconstruction loss (as in Equation (4)) is retained with a small weight () to ensure that the AE component remains effective in finding meaningful latent representations during end-to-end training.
- : A latent space regularization term encouraging smooth evolution in the learned dynamics. As used in this work, this penalizes large second-order differences in the latent space, encouraging a behavior similar to a simple discrete time integration step:This term aims to make the learned latent dynamics locally approximate linear dynamics, making the latent space trajectories smoother and potentially more predictable. This is conceptually related to ensuring that velocity in the latent space () changes smoothly over time, rather than exhibiting sudden jumps or chaotic behavior, which can improve the stability of multi-step rollouts.
- : An optional weight regularization term (e.g., L2) to prevent overfitting, .
4. Test Cases and Results Analysis
4.1. Test Case Setup and Data Generation
- Turbine model: NREL 5MW reference turbine, modeled using ADM with standard parameters.
- Domain size: Varied by case. For single-box studies, canonical box dimensions were . For the two-turbine/three-box case, the total SOWFA simulation domain was .
- Grid resolution: The SOWFA mesh used approximately resolution in the turbine and wake regions. The NN input/output grid resolution within each wind box was fixed at points (approx. spacing), sampled from the high-resolution SOWFA output using ParaView scripts.
- Atmospheric conditions: Standard neutral atmospheric boundary layer (ABL) conditions were simulated first using LES with a dynamic Smagorinsky subgrid-scale model. Turbulent inflow conditions for turbine simulations were generated using the ‘ABLConnector’ tool. Inflow mean wind speeds ranged from to at hub height. Turbulence intensity was approximately 8%.
- Turbine operation: Yaw angles were varied. Static cases used yaw angles like . Dynamic cases involved step changes or continuous variations in yaw angle (e.g., changing from to or over time, assuming mean wind from ).
- Simulation time: Dynamic simulations typically ran for of physical time after an initial spin-up period to establish quasi-steady flow. Data snapshots of the 3D velocity field were saved every .
- SOWFA output (velocity fields ) was processed using the ParaView scripts, extracting the velocity components on the grid within each defined wind box volume.
- For dynamic models, each SOWFA simulation run (e.g., 100 time steps over 200 s) constituted a sequence sample. Training data consisted of pairs along with corresponding inputs for each time step t.
- The datasets were split into training () and testing () sets at the simulation run level. For the multi-turbine case, the dataset was generated from 369 dual-turbine SOWFA runs with varying wind speeds and yaw maneuvers, yielding corresponding sequence samples for each of the three boxes.
- The dataset size of 369 runs for the two-turbine case was chosen to capture variability across different inflow speeds and yaw maneuvers for the specific box configurations used in this study under neutral ABL. Generalizing to significantly different conditions, turbine types, or more complex layouts may require expanding the training dataset to cover the necessary parameter space.
4.2. Case 1: Single Wind Turbine Dynamic Wake Prediction
- Accuracy: The NN surrogate model demonstrated good agreement with the SOWFA results. Figure 4 shows a qualitative comparison of the velocity field on a horizontal slice at hub height for a dynamic yaw maneuver, indicating that the NN captures the main wake features like the velocity deficit shape and trajectory accurately. Figure 5 plots the average velocity error (AVE) on the test set. AVE is defined as the root mean square error (RMSE) of the three velocity components () averaged over all grid points within the box, for a prediction rollout over 100 time steps (200 s physical time). The AVE remained consistently low, typically below across different inflow wind speeds on the test set. The average relative error (AVE divided by the mean inflow speed) was generally below .
- Speed: The NN model achieved significant acceleration. Simulating 200 s of physical time using a trained NN model took approximately 0.4–0.5 on a V100 GPU, compared to approximately for the corresponding SOWFA simulation on a multi-core CPU (Intel Xeon E5-2680 v4, 2.4 GHz, utilizing multiple cores). This represents an acceleration factor of over 10,000×.
4.3. Case 2: Multi-Turbine Dynamic Wake Prediction Using Wind Box Stitching
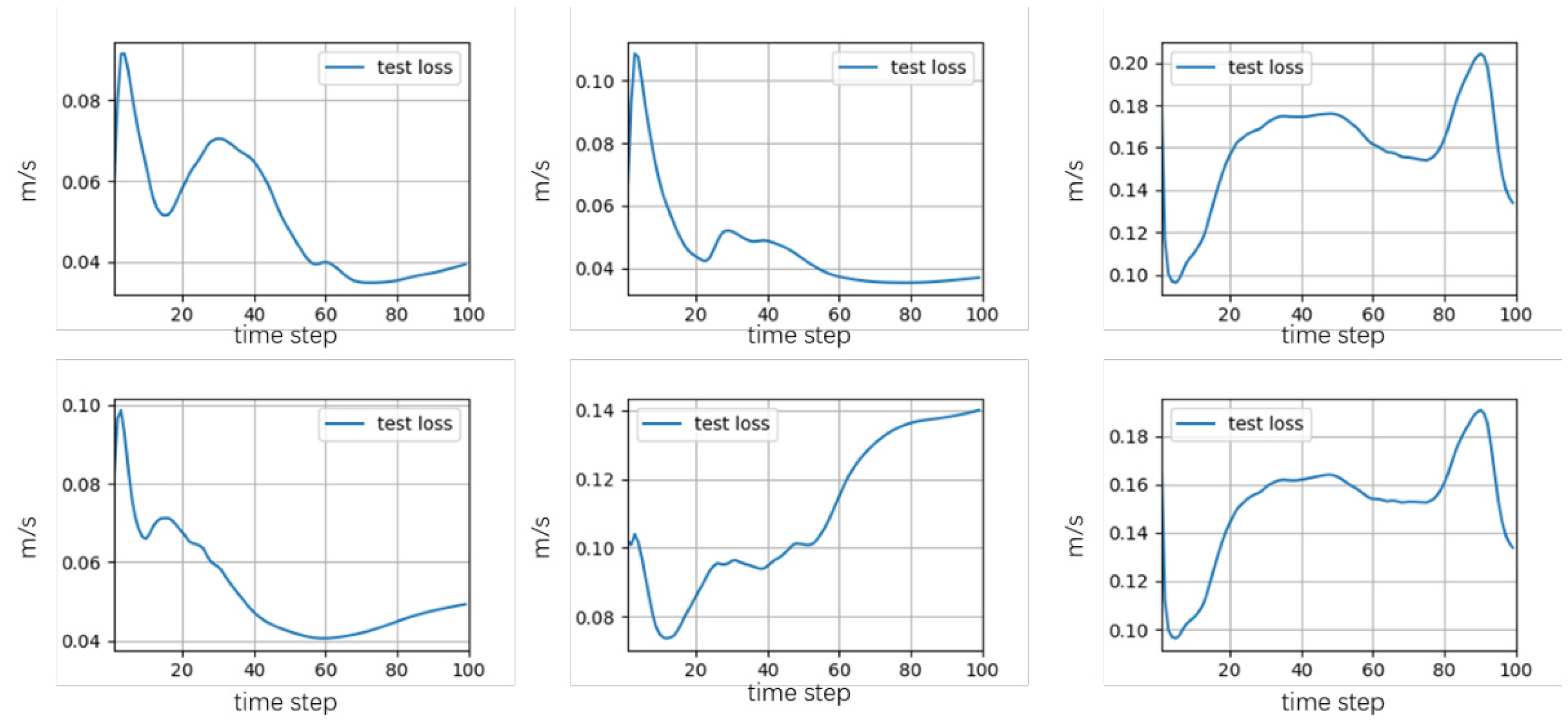
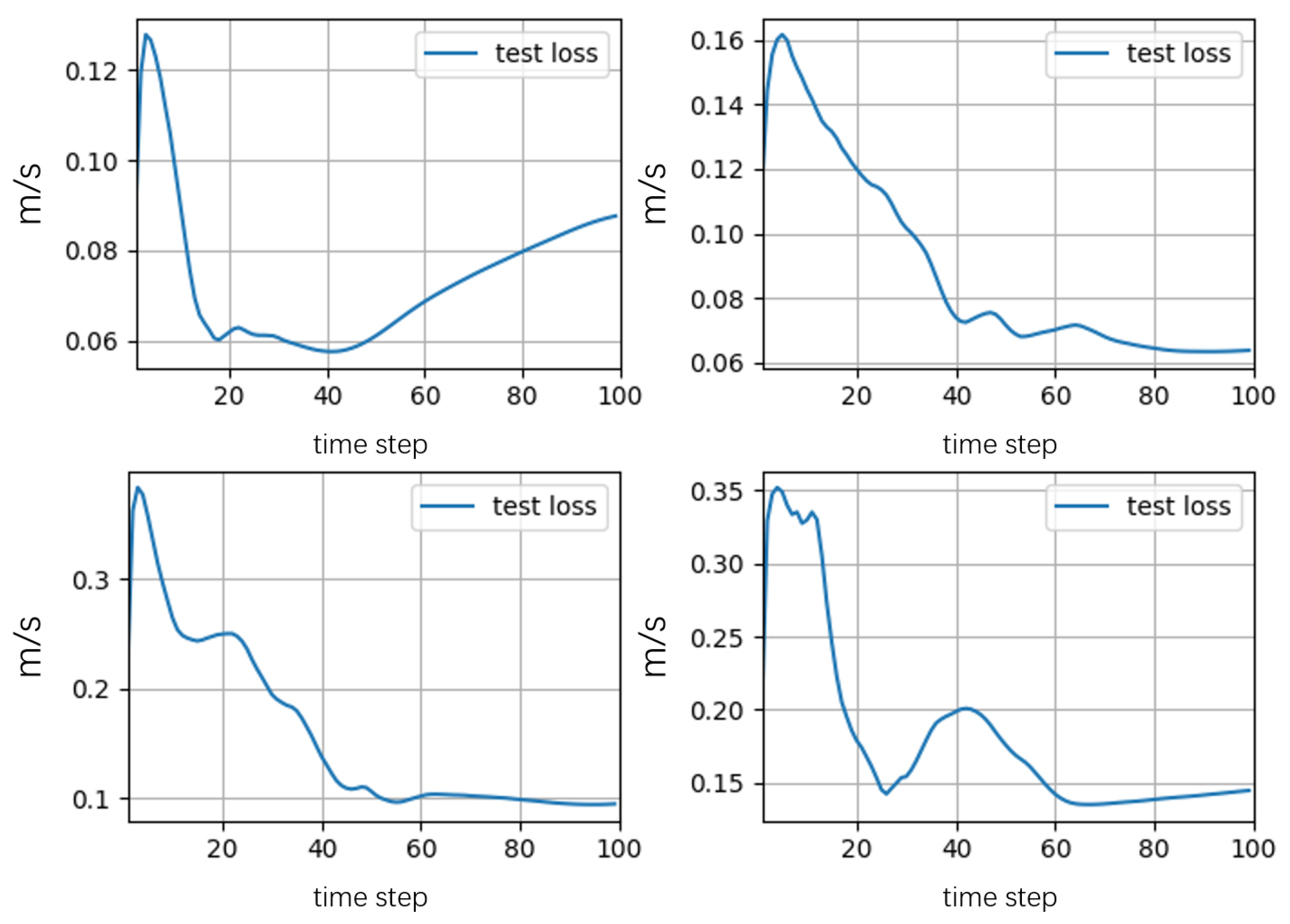
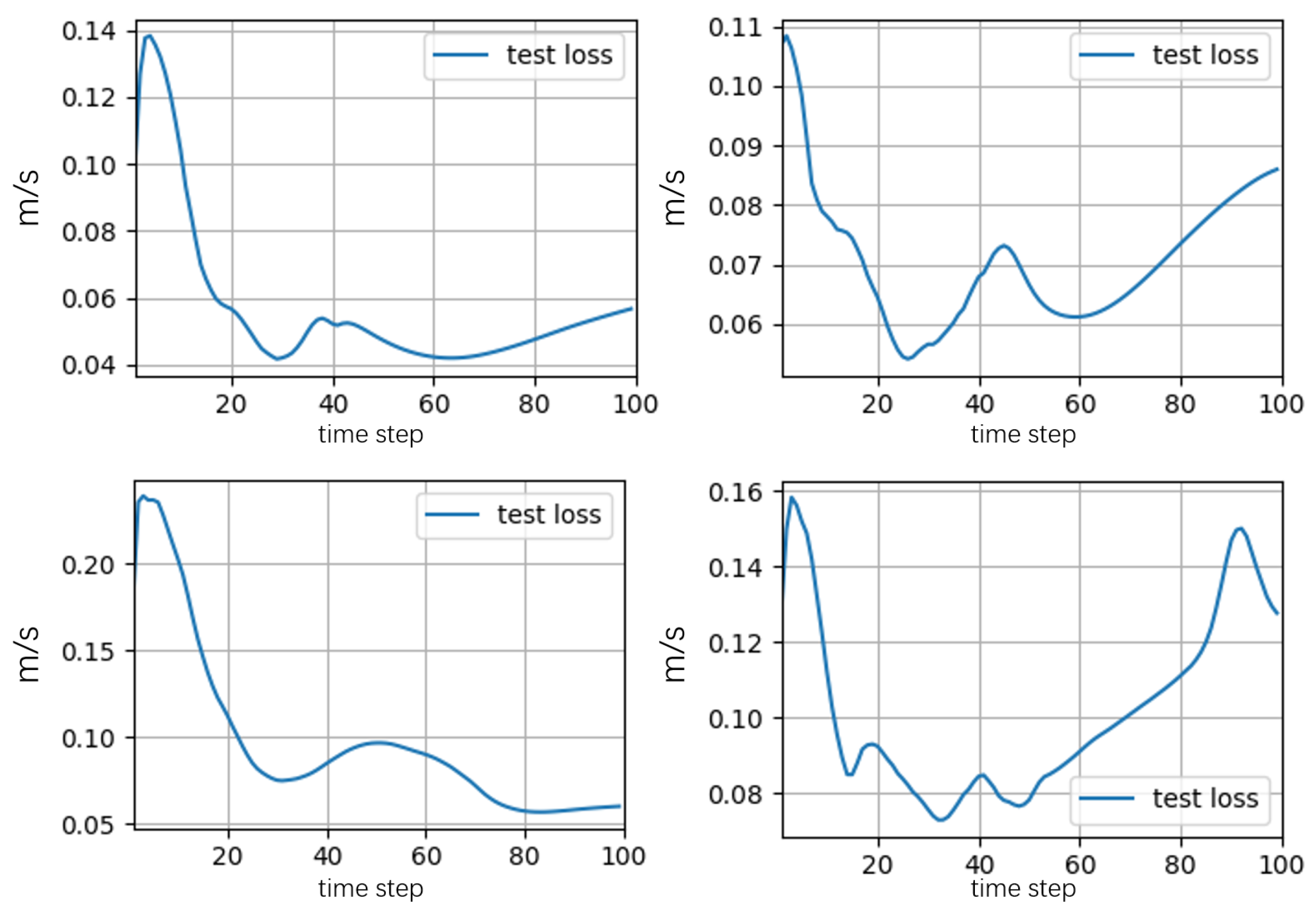
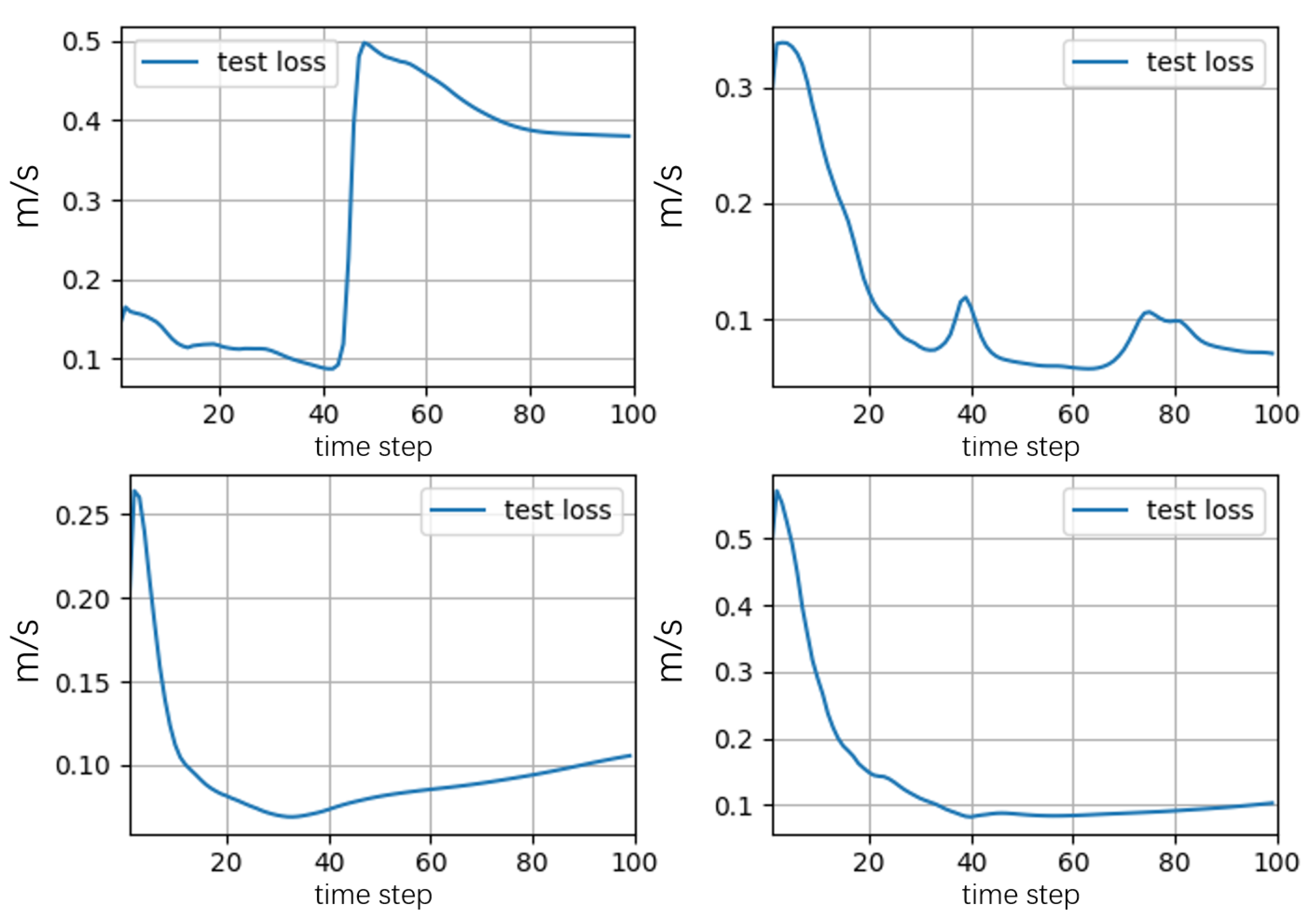
- Accuracy: Figure 6, Figure 7 and Figure 8 show the time evolution of the average velocity error (AVE) within each box compared to the monolithic SOWFA simulation of the two-turbine system on the test set.
- -
- Box 1 (upstream turbine): Similar to the single-turbine case, the AVE remained low, mostly below .
- -
- Box 2 (empty propagation): AVEs remained generally low, also mostly below , indicating that the model effectively propagated the wake structure based on the inflow derived from Box 1’s NN prediction.
- -
- Box 3 (downstream turbine): AVEs were slightly higher than in Box 1 or 2, which is expected due to wake interaction and potential error accumulation through the stitching process. The AVEs generally stayed below on average over the full rollout, with brief peaks during dynamic transitions. The average relative errors remained mostly within 2–5%, which is often considered acceptable for wake modeling applications.
Overall, the stitched wind box model successfully captured the main dynamics of wake interaction, including the reduced velocity impinging on the downstream turbine, demonstrating the potential for this approach to model larger farm wake dynamics. - Speed: Simulating the two-turbine 200 s scenario using the three stitched NN models took approximately 0.9–1.0 on a V100 GPU (summing the inference time for each box). The corresponding monolithic SOWFA simulation took approximately on a multi-core CPU (Intel Xeon E5-2680 v4, 2.4 GHz). The acceleration remains substantial (over 10,000×), demonstrating the computational efficiency of the wind box approach for extended farm layouts.
4.4. Discussion
- Data source and problem formulation: Wang et al. [44] primarily focus on **reconstructing** the wake field from *sparse LiDAR measurement data*, effectively solving an inverse problem constrained by PDEs. Our work, conversely, focuses on **predicting** the future 3D flow field in a *time-stepping manner* given a full initial state, using high-fidelity SOWFA (LES) data as ground truth. This is a crucial distinction: reconstruction (inferring the current state from sparse observations) and prediction (forecasting future states) serve different purposes and have different computational characteristics for continuous operation.
- Scalability to large wind farms: Our proposed “wind box” decomposition strategy is specifically designed to address the scalability challenge for **large wind farms** by breaking down the complex domain into smaller, canonical boxes that can be stitched together. This modularity allows for modeling arbitrary layouts without re-training a monolithic model for each new configuration, a challenge not explicitly addressed by reconstruction-focused PINNs like [44] which typically operate on a single, fixed-size subdomain around a turbine.
- Computational efficiency for long rollouts: Our NN surrogate model achieves a acceleration factor of over 10,000× for multi-time step *predictions* (reducing simulation times from hours to seconds). While PINNs are generally more efficient than full CFD, their computational cost for dynamic *prediction* over long time horizons, especially for high-resolution 3D turbulent flows with full PDE constraints, can still be substantial compared to our compact latent dynamics approach. The “time-stepping” nature of our model, facilitated by the autoencoder and latent dynamics, is highly efficient for multi-step rollouts, which is critical for real-time control applications.
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Neural Network and Training Details
Appendix A.1. Neural Network Architecture
- Layer 1: Conv3D (in-channels 3, kernel size 3, stride [1,1,1], padding [2,2,0]), output shape: . ReLU, BatchNorm3D.
- Layer 2: Conv3D (in-channels 2 kernel size 3, stride [2,2,1], padding 0), output shape: . ReLU, BatchNorm3D.
- Layer 4: Conv3D (in-channels 4 kernel size 3, stride [2,2,2], padding 0), output shape: . ReLU, BatchNorm3D.
- Layer 5: Conv3D (in-channels 8 kernel size 3, stride [2,2,2], padding 0), output shape: . ReLU, BatchNorm3D.
- Layer 6: MaxPool3D (kernel size 3, stride 2, padding 1), output shape: . Dropout3d.
- Layer 7: Flatten, output size .
- Layer 8: Linear, fully connected output size .
- Embedder layer 1: Linear (input , output size 16), ReLU
- Embedder layer 2: Linear (input size 16, output size 32), ReLU
- Embedder layer 3: Linear (input size 32, output size 64), ReLU
- Embedder layer 4: Linear (input size 64, output size 300)
- Badd layer 1: Conv2D (input , kernel size 3, stride [1,2], padding 1), output shape: . ReLU, BatchNorm2D.
- Badd layer 2: Conv2D (in-channels 2, kernel size 3, stride [1,2], padding 1), output shape: . ReLU, BatchNorm2D.
- Badd layer 3: Conv2D (in-channels 4, kernel size 3, stride [2,2], padding 1), output shape: . ReLU, BatchNorm2D.
- Badd layer 4: Conv2D (in-channels 8, kernel size 3, stride [2,2], padding 1), output shape: . ReLU, BatchNorm2D.
- Badd layer 5: MaxPool2D (kernel size 3, stride 2, padding 1), output shape: . Dropout2d
- Badd layer 6: Flatten, output size .
- Badd layer 7: Linear, fully connected output size .
- CatNet layer 1: Linear (input , Embedder (), Badd (), input size 900, output size 256), ReLU
- CatNet layer 2: Linear (input size 256, output size 256), ReLU
- CatNet layer 3: Linear (input size 256, output size 300)
- Layer 1: Linear, fully connected output size .
- Layer 2: Unflatten, (input size ), output shape: . ReLU.
- Layer 3: UpConv3D (in-channels 16, kernel size 3, stride [2,2,2], padding [1,1,1]), output shape: . ReLU, BatchNorm3D.
- Layer 4: UpConv3D (in-channels 8, kernel size 3, stride [2,2,1], padding 0), output shape: . ReLU, BatchNorm3D.
- Layer 5: UpConv3D (in-channels 4 kernel size 3, stride [2,2,2], padding 0), output shape: . ReLU, BatchNorm3D.
- Layer 6: UpConv3D (in-channels 2 kernel size [3,3,4], stride [2,2,2], padding 0), output shape: . ReLU, BatchNorm3D.
Appendix A.2. Training Hyperparameters
- Optimizer: Adam
- Learning rate: Initial learning rate of , decayed by a factor of 0.5 every 50 epochs.
- Batch size: 16
- Epochs: 200 for formal training (pre-training for AE was done for 100 epochs).
- Loss weights: , , .
- Regularization: L2 weight regularization with .
References
- Xi, J. Keynote Speech at the Leaders’ Summit of the Fifteenth Meeting of the Conference of the Parties to the Convention on Biological Diversity (Full Text). Central People’s Government of China. Available online: https://www.gov.cn/xinwen/2021-10/12/content_5642048.htm (accessed on 12 October 2021).
- Xi, J. Speech During the Inspection Tour in Sichuan. Central People’s Government of the People’s Republic of China. Available online: https://www.gov.cn/yaowen/liebiao/202307/content_6895414.htm?device=app (accessed on 29 July 2023).
- China Wind Energy Committee, China Renewable Energy Society. 2023 China Wind Power Installation Capacity Statistical Brief; China Wind Energy Committee, China Renewable Energy Society: Beijing, China, 2024. [Google Scholar]
- National Energy Administration. 2023 National Power Industry Statistical Data; National Energy Administration: Beijing, China, 2024. Available online: https://www.gov.cn/lianbo/bumen/202401/content_6928723.htm (accessed on 28 January 2024).
- National Energy Administration. Modern Energy System Plan for the 14th Five-Year Period; National Energy Administration: Beijing, China, 2022.
- Sourkounis, C.; Tourou, P. Grid code requirements for wind power integration in europe. In Conference Papers in Science; Hindawi: London, UK, 2013; Volume 2013. [Google Scholar]
- National Technical Committee on Power Regulation Standardization. Technical Regulations for Wind Farm Connection to Power Systems [Standard]; China Standards Press: Beijing, China, 2011. [Google Scholar]
- Sichuan Economic and Information Technology Commission. Sichuan Automatic Generation Control Ancillary Service Market Trading Rules. n.d. Available online: http://www.escn.com.cn/news/show-738126.html (accessed on 17 May 2019).
- VanLuvanee, D.R. Investigation of Observed and Modeled Wake Effects at Horns rev Using Windpro; Technical University of Denmark, Department of Mechanical Engineering: Kongens Lyngby, Denmark, 2006. [Google Scholar]
- Zhao, L.; Gong, F.; Chen, S.; Wang, J.; Xue, L.; Xue, Y. Optimization study of control strategy for combined multi-wind turbines energy production and loads during wake effects. Energy Rep. 2022, 8, 1098–1107. [Google Scholar] [CrossRef]
- Hardy, S.; Ergun, H.; Van Hertem, D. A Greedy Algorithm for Optimizing Offshore Wind Transmission Topologies. IEEE Trans. Power Syst. 2022, 37, 2113–2121. [Google Scholar] [CrossRef]
- Ge, X.; Qian, J.; Fu, Y.; Lee, W.-J.; Mi, Y. Transient Stability Evaluation Criterion of Multi-Wind Farms Integrated Power System. IEEE Trans. Power Syst. 2022, 37, 3137–3140. [Google Scholar] [CrossRef]
- Peña, A.; Réthoré, P.-E.; van der Laan, M.P. On the application of the Jensen wake model using a turbulence-dependent wake decay coefficient: The Sexbierum case. Wind. Energy 2016, 19, 763–776. [Google Scholar] [CrossRef]
- Shen, Y.; Xiao, T.; Lv, Q.; Zhang, X.; Zhang, Y.; Wang, Y.; Wu, J. Coordinated optimal control of active power of wind farms considering wake effect. Energy Rep. 2022, 8, 84–90. [Google Scholar] [CrossRef]
- Tao, S.; Kuenzel, S.; Xu, Q.; Chen, Z. Optimal Micro-Siting of Wind Turbines in an Offshore Wind Farm Using Frandsen–Gaussian Wake Model. IEEE Trans. Power Syst. 2019, 34, 4944–4954. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. A new analytical model for wind-turbine wakes. Renew. Energy 2014, 70, 116–123. [Google Scholar] [CrossRef]
- Gebraad, P.M.; Teeuwisse, F.; Van Wingerden, J.; Fleming, P.A.; Ruben, S.D.; Marden, J.R.; Pao, L.Y. Wind plant power optimization through yaw control using a parametric model for wake effects—A cfd simulation study. Wind Energy 2016, 19, 95–114. [Google Scholar] [CrossRef]
- Boersma, S.; Doekemeijer, B.M.; Gebraad, P.M.; Fleming, P.A.; Annoni, J.; Scholbrock, A.K.; Frederik, J.A.; van Wingerden, J.W. A tutorial on control-oriented modeling and control of wind farms. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1–18. [Google Scholar]
- Chorin, J.A. Numerical solution of the Navier–Stokes equation. Math. Comput. 1968, 22, 745–762. [Google Scholar] [CrossRef]
- Deskos, G.; Piggott, M.D. Mesh-adaptive simulations of horizontal-axis turbine arrays using the actuator line method. Wind Energy 2018, 21, 1266–1281. [Google Scholar] [CrossRef]
- Han, Y.; Stoellinger, M.; Naughton, J. Large eddy simulation for atmospheric boundary layer flow over flat and complex terrains. J. Phys. Conf. Ser. 2016, 753, 032044. [Google Scholar] [CrossRef]
- Martínez-Tossas, L.A.; Churchfield, M.J.; Leonardi, S. Large eddy simulations of the flow past wind turbines: Actuator line and disk modeling. Wind Energy 2015, 18, 1047–1060. [Google Scholar] [CrossRef]
- Churchfield, M.; Lee, S.; Moriarty, P. Overview of the Simulator for Offshore Wind Farm Application (Sowfa) National Renewable Energy Laboratory; NREL/TP-5000-54704; NREL: Golden, CO, USA, 2012.
- von Rueden, L.; Mayer, S.; Sifa, R.; Bauckhage, C.; Garcke, J. Combining Machine Learning and Simulation to a Hybrid Modelling Approach: Current and Future Directions. In Advances in Intelligent Data Analysis XVIII; Berthold, M.R., Feelders, A., Krempl, G., Eds.; Springer International Publishing: Konstanz, Germany, 2020; pp. 548–560. [Google Scholar]
- Lavin, A.; Zenil, H.; Paige, B.; Krakauer, D.; Gottschlich, J.; Mattson, T.; Brehmer, J.; Anandkumar, A.; Choudry, S.; Rocki, K.; et al. Simulation Intelligence: Towards a New Generation of Scientific Methods. arXiv 2021, arXiv:2112.03235. [Google Scholar]
- Xiao, T.; Chen, Y.; Wang, J.; Huang, S.; Tong, W.; He, T. Exploration of Artificial Intelligence Oriented Power System Dynamic Simulators. J. Mod. Power Syst. Clean Energy 2022, 11, 401–411. [Google Scholar] [CrossRef]
- Bahaghighat, M.; Abedini, F.; Xin, Q.; Zanjireh, M.M.; Mirjalili, S. Using machine learning and computer vision to estimate the angular velocity of wind turbines in smart grids remotely. Energy Rep. 2021, 7, 8561–8576. [Google Scholar] [CrossRef]
- Marin, R.; Ciortan, S.; Rusu, E. A novel method based on artificial neural networks for selecting the most appropriate locations of the offshore wind farms. Energy Rep. 2022, 8, 408–413. [Google Scholar] [CrossRef]
- Ali, N.; Cal, R.B. Data-driven modeling of the wake behind a wind turbine array. J. Renew. Sustain. Energy 2020, 12, 033304. [Google Scholar] [CrossRef]
- Chen, K.; Lin, J.; Qiu, Y.; Liu, F.; Song, Y. Deep learning-aided model predictive control of wind farms for AGC considering the dynamic wake effect. Control Eng. Pract. 2021, 116, 104925. [Google Scholar] [CrossRef]
- Stevens, R.J.A.M.; Martinez-Tossas, L.A.; Meneveau, C. Large eddy simulation of the atmospheric boundary layer over a wind farm: Validation and sensitivity to the actuator disk model. J. Renew. Sustain. Energy 2016, 8, 154–168. [Google Scholar]
- Churchfield, M.J.; Lee, S.; Michaud, S.R.; NREL SOWFA Team. SOWFA: Simulating the Wind Farm Atmosphere; NREL/TP-5000-56093; 2012. Available online: https://www.nrel.gov/docs/libraries/wind-docs/sowfa-tutorial.pdf?sfvrsn=eb8c7763_1 (accessed on 20 June 2025).
- Cai, S.; Mao, Z.; Wang, Z.; Yin, M.; Em Karniadakis, G. Physics-informed neural networks (PINNs) for fluid mechanics: A review. Acta Mech. Sin. 2021, 37, 1727–1738. [Google Scholar] [CrossRef]
- Ali, M.; Cal, R.B. Deep learning for wind turbine wake estimation. Appl. Energy 2020, 269, 115042. [Google Scholar]
- Chen, T.; Qian, Z.; Chen, C.; Zhang, Y. A deep learning-based model predictive control for wind farm considering dynamic wake effects. Appl. Energy 2021, 300, 117392. [Google Scholar]
- Kim, J.; Lee, S. A review of machine learning applications in wind energy systems: A comprehensive overview. Energy Rep. 2021, 7, 7254–7278. [Google Scholar]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics informed deep learning (part I): Data-driven solutions of nonlinear partial differential equations. arXiv 2017, arXiv:1711.10561. [Google Scholar]
- Liu, B.; Wang, Y.; Rabczuk, T.; Olofsson, T.; Lu, W. Multi-scale modeling in thermal conductivity of polyurethane incorporated with phase change materials using physics-informed neural networks. Renew. Energy 2024, 220, 119565. [Google Scholar] [CrossRef]
- Li, P.; Liu, M.; Alfarrla, M.; Tahmasebi, P.; Grana, D. Probabilistic physics-informed neural network for seismic petrophysical inversion. Geophysics 2024, 89, M17–M32. [Google Scholar] [CrossRef]
- Huang, B.; Wang, J. Applications of physics-informed neural networks in power systems-a review. IEEE Trans. Power Syst. 2022, 38, 572–588. [Google Scholar] [CrossRef]
- Stiasny, J.; Misyris, G.S.; Chatzivasileiadis, S. Transient stability analysis with physics-informed neural networks. arXiv 2021, arXiv:2106.13638. [Google Scholar]
- Daniele, L.-O.; Meanti, G.; Pagliana, N.; Verri, A.; Mazzino, A.; Rosasco, L.; Seminara, A. Physics informed machine learning for wind speed prediction. Energy 2023, 268, 126628. [Google Scholar]
- Wang, L.; Chen, M.; Luo, Z.; Zhang, B.; Xu, J.; Wang, Z.; Tan, Z.C.C. Dynamic wake field reconstruction of wind turbine through Physics-Informed Neural Network and Sparse LiDAR data. Energy 2024, 291, 130401. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, X. Digital twin of wind farms via physics-informed deep learning. Energy Convers. Manag. 2023, 293, 117507. [Google Scholar] [CrossRef]
- Xiao, T.; Cao, Y.; Liang, B.; Wang, Y.; Wang, J.; Chen, Y. Design and implementation of a general batch simulation tool of SOWFA and its application in training a single-turbine surrogate. Energy Rep. 2023, 9, 419–426. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature/Method | Analytical Models | Data-Driven |
|---|---|---|
| Computational cost | Very low | Low to moderate |
| Accuracy | Low to moderate | High |
| Generalizability | High | Low |
| Generalizability | Moderate | Moderate to high |
| Training requirement | Low | Very high |
| Scalability | Good | Poor |
| Interpretability | Good | Low |
| Handling of local features | Limited | Good |
| Component | Type | Input | Output |
|---|---|---|---|
| Encoder | 3D CNNs | 3D velocity grid | Latent vector (e.g., ) |
| Latent dynamics | MLPs | Concatenated , , | Predicted latent vector |
| Decoder | 3D TCNNs | Predicted latent vector | Predicted 3D velocity grid (e.g., ) |
| Scenario | SOWFA (CFD) Time | NN Surrogate Time | Acceleration Factor |
|---|---|---|---|
| Single turbine (Case 1) | ∼ 1 h 46 min | 0.4–0.5 s | >10,000× |
| Two turbines (Case 2) | ∼ 3 h 30 min | 0.9–1.0 s | >10,000× |
| Analytical (e.g., FLORIDyn) * | N/A | ∼2–3 s | N/A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Q.; Cao, Y.; Xie, P.; Chen, Y.; Lin, Y. A Scalable Data-Driven Surrogate Model for 3D Dynamic Wind Farm Wake Prediction Using Physics-Inspired Neural Networks and Wind Box Decomposition. Energies 2025, 18, 3356. https://doi.org/10.3390/en18133356
Lu Q, Cao Y, Xie P, Chen Y, Lin Y. A Scalable Data-Driven Surrogate Model for 3D Dynamic Wind Farm Wake Prediction Using Physics-Inspired Neural Networks and Wind Box Decomposition. Energies. 2025; 18(13):3356. https://doi.org/10.3390/en18133356
Chicago/Turabian StyleLu, Qiuyu, Yuqi Cao, Pingping Xie, Ying Chen, and Yingming Lin. 2025. "A Scalable Data-Driven Surrogate Model for 3D Dynamic Wind Farm Wake Prediction Using Physics-Inspired Neural Networks and Wind Box Decomposition" Energies 18, no. 13: 3356. https://doi.org/10.3390/en18133356
APA StyleLu, Q., Cao, Y., Xie, P., Chen, Y., & Lin, Y. (2025). A Scalable Data-Driven Surrogate Model for 3D Dynamic Wind Farm Wake Prediction Using Physics-Inspired Neural Networks and Wind Box Decomposition. Energies, 18(13), 3356. https://doi.org/10.3390/en18133356