
Improved Discrete-Time Active Disturbance Rejection Control for Enhancing Dynamics of Current Loop in LC-Filtered SPMSM Drive System


Abstract
1. Introduction
- (1)
- A comprehensive comparison demonstrating the superior performance of ZOH discretization in accurately modeling discrete system dynamics and the enhanced delay compensation capability of the proposed predictive observer over conventional approaches, establishing the necessity of the proposed method for high-performance applications.
- (2)
- Development of an accurate discrete-domain transfer function for the control system, accompanied by a systematic discrete-domain parameter design methodology based on frequency-domain analysis, ensuring robust stability and consistent dynamic performance under parameter variations.
- (3)
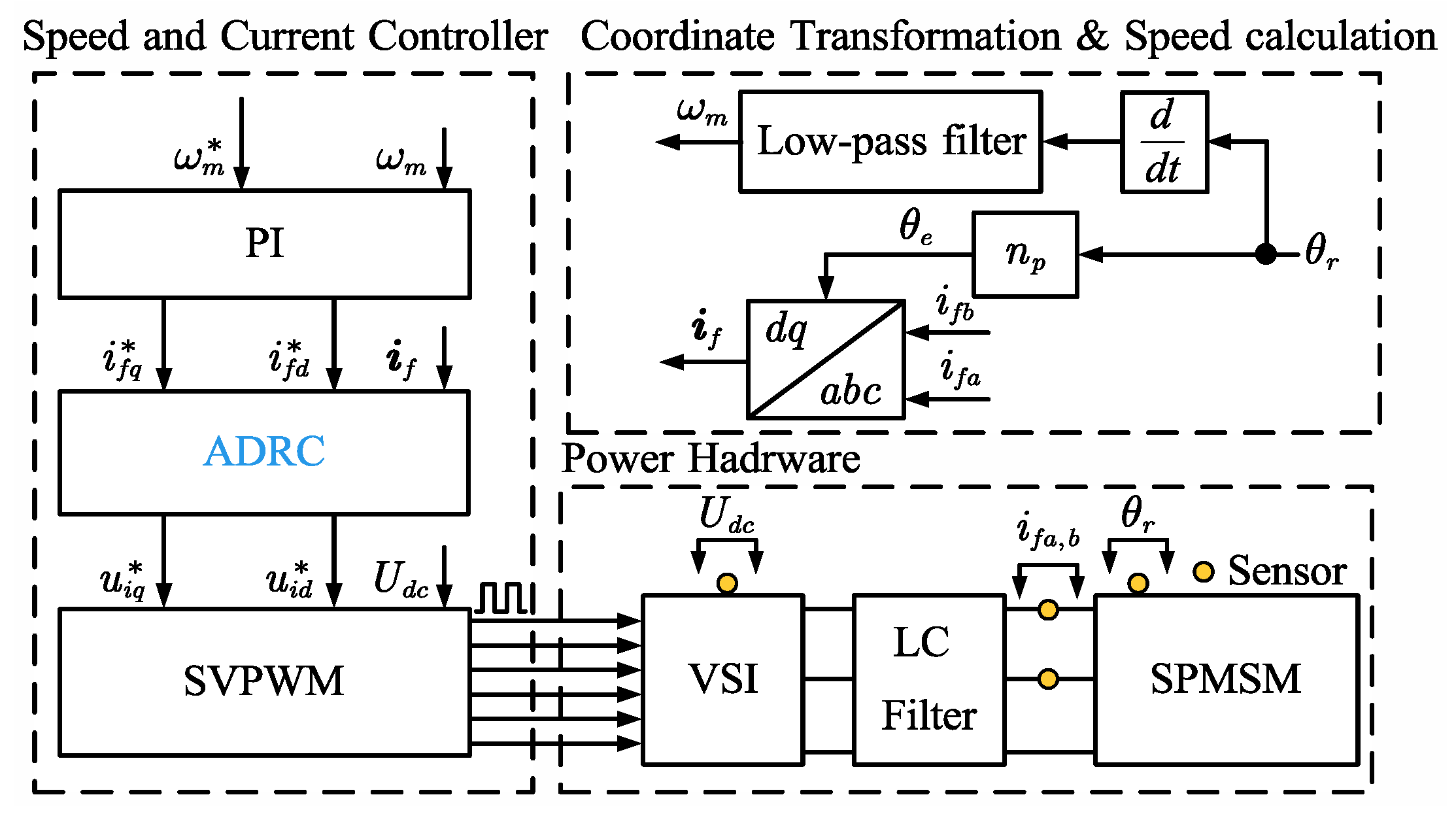
2. Modeling of LC-Filtered SPMSM Drive System and Traditional ADRC Design
2.1. Mathematical Modeling of System
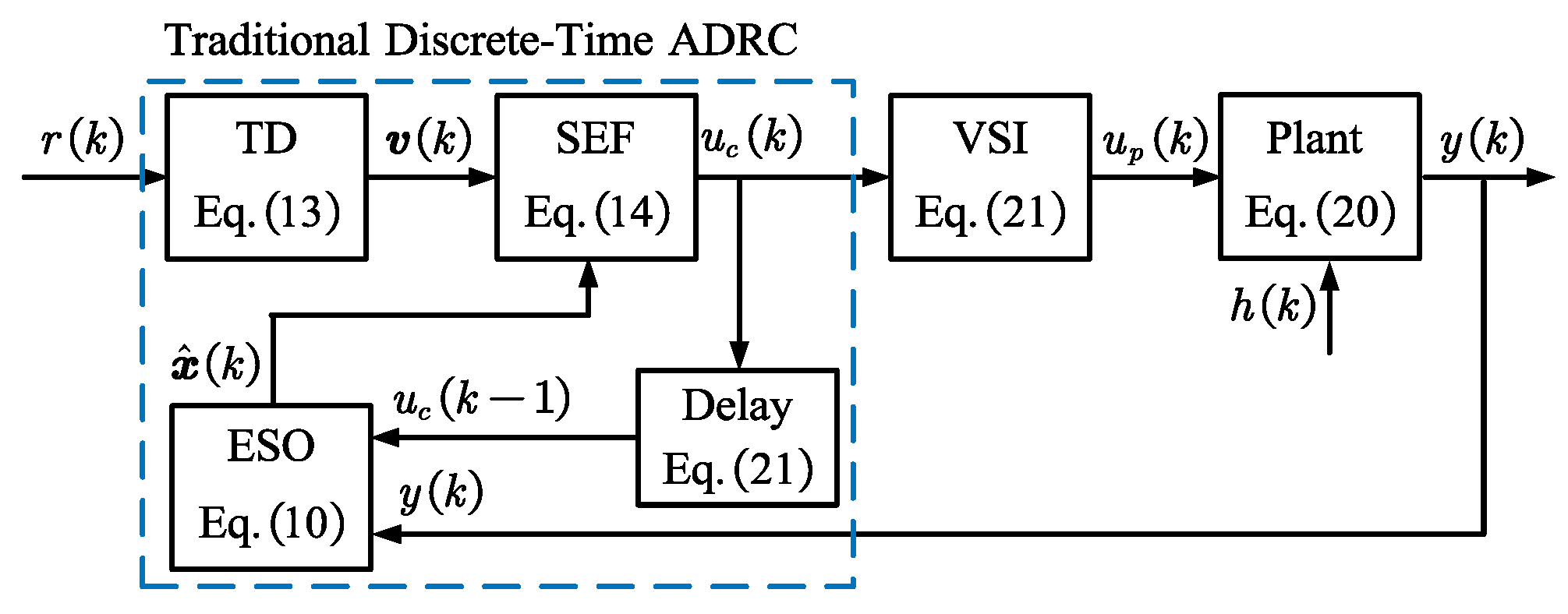
2.2. Design of the Third-Order ADRC in Continues Domain
2.3. Limitations of Euler Discretion and Current Observer
3. Proposed Predictive ESO for Delay Compensation and ZOH Accurate Discretization
3.1. Accurate Plant Discretization via ZOH Method
3.2. Improved Predictive ESO with One-Beat Lead
4. Robust Control Parameter Design Based on Open-Loop Transfer Function Margin Metrics
4.1. Open-Loop Transfer Function Derivation
4.2. Control Parameters Design and Margins Improvement
- A minimum phase margin of 40°.
- A minimum gain margin of 6 dB.
4.3. Tracking Differentiator and Step Response
5. Experimental Verification
5.1. Speed and Current Response During Startup
5.2. Current Step Responses of Proposed Discretization Method at Different Rotor Speeds
5.3. Comparison of Closed-Loop Performance with Different Discretization Methods
- (a)
- Frequency-domain: closed-loop frequency sweep with different discretization methods
- (b)
- Time-domain: step response with different discretization methods
5.4. Comparison with Existing Methods
5.5. Robustness Validation via Open-Loop Margins and Step Response Under Parameter Mismatches
- (a)
- Frequency-domain: open-loop transfer function frequency sweep
- (b) Time-domain: step response under parameter mismatches
5.6. Increasing and Reducing Load Torque
5.7. Voltage and Current Characteristics at Inverter Output and LC Filter Output
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SPMSM | Surface-mounted permanent magnet synchronous motor |
| ZOH | Zero-order hold |
| Eul. | Euler discretization |
| Cur. | Current observer |
| Pre. | Improved predictive observer |
| GM, PM | Gain margin, phase margin |
| MB, PB | Magnitude bandwidth, phase bandwidth |
| PO | Percentage of overshoot |
| ts | Settling time |
| ITAE | Integral of the time multiplied by the absolute error |
References
- Yang, J.; Chen, W.H.; Li, S.; Guo, L.; Yan, Y. Disturbance/ uncertainty estimation and attenuation techniques in PMSM drives—A survey. IEEE Trans. Ind. Electron. 2017, 64, 3273–3285. [Google Scholar] [CrossRef]
- Jiang, Y.; Wu, W.; He, Y.; Chung, H.S.; Blaabjerg, F. New passive filter design method for overvoltage suppression and bearing currents mitigation in a long cable based PWM inverter-fed motor drive system. IEEE Trans. Power Electron. 2017, 32, 7882–7893. [Google Scholar] [CrossRef]
- Velander, E.; Bohlin, G.; Sandberg, A.; Wiik, T.; Botling, F.; Lindahl, M.; Zanuso, G.; Nee, H.-P. An ultralow loss inductorless dv/dt filter concept for medium-power voltage source motor drive converters with SiC devices. IEEE Trans. Power Electron. 2018, 33, 6072–6081. [Google Scholar] [CrossRef]
- Mishra, P.; Maheshwari, R. Design analysis and impacts of sinusoidal LC filter on pulsewidth modulated inverter fed-induction motor drive. IEEE Trans. Ind. Electron. 2020, 67, 2678–2688. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Q.; Luo, H.; Wang, H.; Wang, J.; Han, F.; Wang, A.; Liu, X.; Yu, X.; Zhou, L. Sensorless starting control of permanent magnet synchro-nous motors with Step-up transformer for downhole electric drilling. In Proceedings of the 44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 689–694. [Google Scholar]
- Zheng, C.; Xie, M.; Dong, X.; Gong, Z.; Dragičević, T.; Rodriguez, J. Design and analysis of predictive inductor current control for PMSM drives with LC filter. IEEE Trans. Power Electron. 2025, 40, 1872–1885. [Google Scholar] [CrossRef]
- Zheng, C.; Xie, M.; Dong, X.; Gong, Z.; Dragičević, T.; Rodriguez, J. Modulated model predictive current control with active damping for LC-filtered PMSM drives. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 3848–3861. [Google Scholar] [CrossRef]
- Xue, C.; Zhou, D.; Li, Y. Finite-control-set model predictive control for three-level NPC inverter-fed PMSM drives with LC filter. IEEE Trans. Ind. Electron. 2021, 68, 11980–11991. [Google Scholar] [CrossRef]
- Zhou, J.; Yao, Y.; Huang, Y.; Peng, F. Motor Current feedback-only active damping controller with high robustness for LCL-equipped high-speed PMSM. IEEE Trans. Power Electron. 2023, 38, 8707–8718. [Google Scholar] [CrossRef]
- Vaishnav, N.; Bajjuri, N.K.; Jain, A.K. Inductor selection, improved active damping, and speed sensorless operation without voltage sensors in IM drive with LC filter. IEEE Trans. Power Electron. 2022, 37, 15272–15282. [Google Scholar] [CrossRef]
- Yao, Y.; Huang, Y.; Peng, F.; Dong, J.; Zhu, Z. Dynamic-decoupled active damping control method for improving current transient behavior of LCL-equipped high-speed PMSMs. IEEE Trans. Power Electron. 2022, 37, 3259–3271. [Google Scholar] [CrossRef]
- Lyu, Z.; Wu, L. Current control scheme for LC-equipped PMSM drive considering decoupling and resonance suppression in synchronous complex-vector frame. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 2061–2073. [Google Scholar] [CrossRef]
- Mukherjee, S.; Poddar, G. Fast control of filter for sensorless vector control SQIM drive with sinusoidal motor voltage. IEEE Trans. Ind. Electron. 2007, 54, 2435–2442. [Google Scholar] [CrossRef]
- Vaishnav, N.; Jain, A.K. Limitations in inner-loop PI controllers in IM drive with an LC filter and its remedies. IEEE Trans. Ind. Appl. 2022, 58, 3602–3612. [Google Scholar] [CrossRef]
- Li, S.; Lin, H. A capacitor-current-feedback positive active damping control strategy for LCL-type grid-connected inverter to achieve high robustness. IEEE Trans. Power Electron. 2022, 37, 6462–6474. [Google Scholar] [CrossRef]
- Yang, S.; Yin, Z.; Tong, C.; Sui, Y.; Zheng, P. Active damping current control for current-source inverter-based PMSM drives. IEEE Trans. Ind. Electron. 2023, 70, 3549–3560. [Google Scholar] [CrossRef]
- Li, Q.; Wang, D.; Liang, X.; Guo, P.; Ma, C. Complex vector-based stability analysis of the high-speed electric motor emulator. IEEE Trans. Power Electron. 2024, 39, 346–360. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Doval-Gandoy, J.; López, Ó.; Malvar, J.; Fernandez-Comesaña, P. Effects of discretization methods on the performance of resonant controllers. IEEE Trans. Power Electron. 2010, 25, 1692–1712. [Google Scholar] [CrossRef]
- Bae, B.-H.; Sul, S.-K. A compensation method for time delay of full-digital synchronous frame current regulator of PWM AC drives. IEEE Trans. Ind. Appl. 2003, 39, 802–810. [Google Scholar] [CrossRef]
- Wang, M.; Buticchi, G.; Li, J.; Gu, C.; Gerada, D.; Degano, M.; Xu, L.; Li, Y.; Zhang, H.; Geradab, C. Decoupled discrete current control for ac drives at low sampling-to-fundamental frequency ratios. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 1358–1369. [Google Scholar] [CrossRef]
- Pei, G.; Liu, J.; Gao, X.; Tian, W.; Li, L.; Kennel, R. Deadbeat predictive current control for SPMSM at low switching frequency with moving horizon estimator. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 345–353. [Google Scholar] [CrossRef]
- Dai, S.; Wang, J.; Sun, Z.; Chong, E. Deadbeat predictive current control for high-speed permanent magnet synchronous machine drives with low switching-to-fundamental frequency ratios. IEEE Trans. Ind. Electron. 2022, 69, 4510–4521. [Google Scholar] [CrossRef]
- Kim, H.-S.; Jung, H.-S.; Sul, S.-K. Discrete-time voltage controller for voltage source converters with LC filter based on state-space models. IEEE Trans. Ind. Appl. 2019, 55, 529–540. [Google Scholar] [CrossRef]
- Pérez-Estévez, D.; Doval-Gandoy, J.; Yepes, A.G.; López, Ó. Positive- and negative-sequence current controller with direct discrete-time pole placement for grid-tied converters with LCL filter. IEEE Trans. Power Electron. 2017, 32, 7207–7221. [Google Scholar] [CrossRef]
- Huang, K.; Zhou, J.; Zhao, H.; Lv, W.; Huang, S. Novel compensation method of digital delay for high-speed permanent magnet synchronous motor under low carrier ratio. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 3854–3861. [Google Scholar]
- Yim, J.-S.; Sul, S.-K.; Bae, B.-H.; Patel, N.R.; Hiti, S. Modified current control schemes for high-performance permanent-magnet ac drives with low sampling to operating frequency ratio. IEEE Trans. Ind. Appl. 2009, 45, 763–771. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Lin, X.; Wu, C.; Yao, W.; Liu, Z.; Shen, X.; Xu, R.; Sun, G.; Liu, J. Observer-Based Fixed-Time Control for Permanent-Magnet Synchronous Motors With Parameter Uncertainties. IEEE Trans. Power Electron. 2023, 38, 4335–4344. [Google Scholar] [CrossRef]
- Lin, X.; Liu, J.; Liu, Z.; Gao, Y.; Peretti, L.; Wu, L. Model-Free Current Predictive Control for PMSMs With Ultra-Local Model Employing Fixed-Time Observer and Extremum-Seeking Method. IEEE Trans. Power Electron. 2025, 40, 10682–10693. [Google Scholar] [CrossRef]
- Lin, X.; Xu, R.; Yao, W.; Gao, Y.; Sun, G.; Liu, J.; Peretti, L.; Wu, L. Observer-Based Prescribed Performance Speed Control for PMSMs: A Data-Driven RBF Neural Network Approach. IEEE Trans. Ind. Inform. 2024, 20, 7502–7512. [Google Scholar] [CrossRef]
- Li, P.; Bazzi, A.; Lin, H.; Gultekin, M.A. Seamless Start-up of Loaded PMSM Drive from Open-Loop Id/F to Sensorless FOC. In Proceedings of the 2023 IEEE International Electric Machines & Drives Conference (IEMDC), San Francisco, CA, USA, 15–18 May 2023; pp. 1–5. [Google Scholar]
- Li, Z.; Wang, J.; Yang, H.; Zhou, L. Fast and robust current controller for long-cable-fed PMSM drive using cascaded model-assisted active disturbance rejection control. IEEE J. Emerg. Sel. Top. Power Electron. 2025, 13, 480–491. [Google Scholar] [CrossRef]
- Ma, W.; Guan, Y.; Zhang, B.; Wu, L. Active disturbance rejection control based single current feedback resonance damping strategy for LCL-type grid-connected inverter. IEEE Trans. Energy Conver. 2021, 36, 48–62. [Google Scholar] [CrossRef]
- Cai, Y.; He, Y.; Zhou, H.; Liu, J. Active-damping disturbance rejection control strategy of LCL grid-connected inverter based on inverter-side current feedback. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 7183–7198. [Google Scholar] [CrossRef]
- Tran, T.V.; Kim, K.H.; Lai, J.S. Optimized active disturbance rejection control with resonant extended state observer for grid voltage sensorless LCL-filtered inverter. IEEE Trans. Power Electron. 2021, 36, 13317–13331. [Google Scholar] [CrossRef]
- Miklosovic, R.; Radke, A.; Gao, Z. Discrete implementation and generalization of the extended state observer. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 1–6. [Google Scholar]
- Du, B.; Wu, S.; Han, S.; Cui, S. Application of linear active disturbance rejection controller for sensorless control of internal permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2016, 63, 3019–3027. [Google Scholar] [CrossRef]
- Zheng, Q.; Gao, Z. Predictive active disturbance rejection control for processes with delay. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 4108–4113. [Google Scholar]
- Wu, J.-A.; Tian, C.; Yan, P. A predictor-based ADRC for input delay systems subject to unknown disturbances. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 2 November–2 December 2018; pp. 231–236. [Google Scholar]
- Yan, Q.; Wu, X.; Yuan, X.; Geng, Y. An improved grid-voltage feedforward strategy for high-power three-phase grid-connected inverters based on the simplified repetitive predictor. IEEE Trans. Power Electron. 2016, 31, 3880–3897. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Control Bandwidth and Observer Bandwidth | Phase Margin | Reduced Bandwidth | Phase Margin |
|---|---|---|---|---|
| “ZOH + Pre.” | 500 Hz; 1500 Hz | 63.8° | No need to reduce bandwidth | |
| “Eul. + Pre.” | 500 Hz; 1500 Hz | 18.5° | 300 Hz; 600 Hz | 41.2° |
| “ZOH + Cur.” | 500 Hz; 1500 Hz | 3.3° | 300 Hz; 600 Hz | 40.1° |
| “Eul. + Cur.” | 500 Hz; 1500 Hz | −73.5° | 150 Hz; 600 Hz | 34.5° |
| Methods | |||
|---|---|---|---|
| “ZOH + Pre.” | 500 Hz | 1500 Hz | 1000 Hz |
| “Eul. + Pre.” | 300 Hz | 600 Hz | 600 Hz |
| “ZOH + Cur.” | 300 Hz | 600 Hz | 600 Hz |
| “Eul. + Cur.” | 150 Hz | 600 Hz | 300 Hz |
| Symbol | Parameter | Value |
|---|---|---|
| Inductance of filter | 2.2 mH | |
| Resistance of filter | ||
| Capacitor of filter | ||
| Inductance of SPMSM | 6.5 mH | |
| Resistance of stator | ||
| Number of pole pairs | 4 | |
| Motor flux linkage | 0.086 Wb | |
| Rated motor current | 3.5 A | |
| Rated motor power | 750 W | |
| Rated rotor speed | 1500 r/min | |
| System moment of inertia (with load) | 0.005 kg·m2 | |
| DC-link voltage | 311 V | |
| Sampling and Switching frequency | 10 kHz |
| Methods | Settling Periods | Percentage of Overshoot | Voltage and Current Sensors |
|---|---|---|---|
| Proposed | 11 | Nearly 0% | Filter output current *2 |
| MPC [7] | 52 | 24% | Filter output current *2 Filter capacitor current *2 Inverter output current *2 |
| AD [9] | 40 | 30% | Filter output current *2 |
| TCPI [13] | 41 | 8% | Filter output current *2 Filter output voltage *2 Inverter output current *2 |
| ADRC 1 | 97 | 2% | Filter output current *2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Yang, H.; Wang, J.; Wang, Y.; Zhou, L. Improved Discrete-Time Active Disturbance Rejection Control for Enhancing Dynamics of Current Loop in LC-Filtered SPMSM Drive System. Energies 2025, 18, 2894. https://doi.org/10.3390/en18112894
Li Z, Yang H, Wang J, Wang Y, Zhou L. Improved Discrete-Time Active Disturbance Rejection Control for Enhancing Dynamics of Current Loop in LC-Filtered SPMSM Drive System. Energies. 2025; 18(11):2894. https://doi.org/10.3390/en18112894
Chicago/Turabian StyleLi, Zibo, Haitao Yang, Jin Wang, Yali Wang, and Libing Zhou. 2025. "Improved Discrete-Time Active Disturbance Rejection Control for Enhancing Dynamics of Current Loop in LC-Filtered SPMSM Drive System" Energies 18, no. 11: 2894. https://doi.org/10.3390/en18112894
APA StyleLi, Z., Yang, H., Wang, J., Wang, Y., & Zhou, L. (2025). Improved Discrete-Time Active Disturbance Rejection Control for Enhancing Dynamics of Current Loop in LC-Filtered SPMSM Drive System. Energies, 18(11), 2894. https://doi.org/10.3390/en18112894