
Mean Field Game-Based Algorithms for Charging in Solar-Powered Parking Lots and Discharging into Homes a Large Population of Heterogeneous Electric Vehicles


Abstract
1. Introduction
- (i)
- As fair as possible: We want, at the end of charging or discharging, for each customer to have the state of charge of their battery to always be close to the average of the states of charge of the batteries of all customers, regardless of their state of charge upon arrival. We are therefore leaning towards a charging or discharging algorithm a priori favoring BEVs which are the emptiest compared to those that are more full when they arrive. The justification for this bias in favor of emptier vehicles is the potential urgency of charging them in the parking lot in the case of early departures, but also, by the appropriate equalization of vehicle states of charge, we maximize a priori the chances of participation of a given vehicle in grid support operations during peak evening hours. However, the emptiest BEVs upon arrival must in no way exceed those arriving fuller when charging in the parking lot or discharging into the grid.
- (ii)
- As decentralized as possible: From the aggregator’s point of view, decentralized control strategies are quite desirable because they minimize the information exchange and the need to observe the individual batteries, which could be complex and invasive. Additionally, a local policy allows a customer to interrupt their charging or discharging process at any time (emergency departure, battery life cycle health, etc.).
- (i)
- A novel MFG inverse Nash algorithm for charging heterogeneous BEVs in a solar-powered parking lot or discharging their energy into the grid.
- (ii)
- A rigorous justification of the existence of the solution to the MFG inverse Nash problem for deterministic data aimed at achieving a fair and decentralized charging or discharging algorithm.
- (iii)
- Testing and validation of the MFG inverse Nash algorithm for charging and discharging a large population of heterogeneous BEVs, based on realistic data while considering the physical constraints of vehicle batteries, on three days in a year (the sunniest, an average, and the cloudiest).
2. Mean Field Game-Based Control for Charging or Discharging a Large Population of Heterogeneous BEVs
2.1. Battery Model
2.1.1. Heterogeneous Batteries
2.1.2. Homogeneous Batteries
2.2. Establishment of Individual Battery Cost Function
- (i)
- is the control horizon.
- (ii)
- is a discount coefficient to guarantee the convergence of the cost J in a context of extension to an infinite horizon (). Then, for a finite horizon .
- (iii)
- r is a coefficient common to all BEVs which penalizes charging or discharging intensity. Therefore, we would like it to be as small as possible.
- (iv)
- is the state of charge of BEV i at time t. Note that at , the states of charge of BEVs are assumed to be known, with a finite mean and a finite standard deviation (STD) .
- (v)
- y is a state-of-charge value serving as a possible final destination for Therefore, in the vehicle charging problem and in the vehicle discharging problem.
- (vi)
- is a coefficient, at time t, common to all BEVs which penalizes any distance from y. Then, is the pressure field that would give priority to the less-full BEVs upon arrival. It would be calculated in the reverse engineering mechanism (called inverse Nash) [27,28,45] detailed in Appendix A, the aim of which is to reduce the standard deviation in the states of charge of BEVs at the end of charging or discharging. It is that creates the link between agents (here, BEVs) in the game (i.e., as the mean field).
- (vii)
- is a coefficient common to all BEVs which penalizes any distance from . Then, would preserve the order of the states of charge upon arrival and so, added with the effect of , the emptiest BEVs upon arrival must in no way exceed those arriving fuller. We consequently obtain a fair and decentralized algorithm.
2.3. Implementation of the MFG Inverse Nash Algorithm
- (i)
- The MFG inverse Nash algorithm is implemented under deterministic consideration, i.e., the data on solar acquisition in the parking lot, the duration of the evening peak, and the numbers of arriving and departing BEVs are assumed to be known in advance, such that all BEVs start and finish charging or discharging at the same time.
- (ii)
- There exists a two-way communication infrastructure to coordinate BEVs charging in the parking lot or discharging into the grid.
- (iii)
- BEV owners use chargers that are equipped with microprocessors allowing them to compute and implement a local feedback-based algorithm for charging or discharging their batteries.
- (iv)
- BEV owners communicate their battery energy on their usable capacity upon arrival (for example, 25 kWh/100 kWh 0.25 of SOC) and then the aggregator provides them with the common pressure field trajectory that each BEV owner uses to locally compute their optimal feedback-based charging or discharging policy .
2.4. MFG Inverse Nash Algorithm for Charging or Discharging Heterogeneous BEVs
| Algorithm 1 MFG Inverse Nash algorithm for Charging or Discharging Heterogeneous BEVs |
|
3. Charging a Large Population of Heterogeneous BEVs in a Parking Lot
3.1. Experimental Platform and Data Sources in the Case of Charging
- (i)
- (ii)
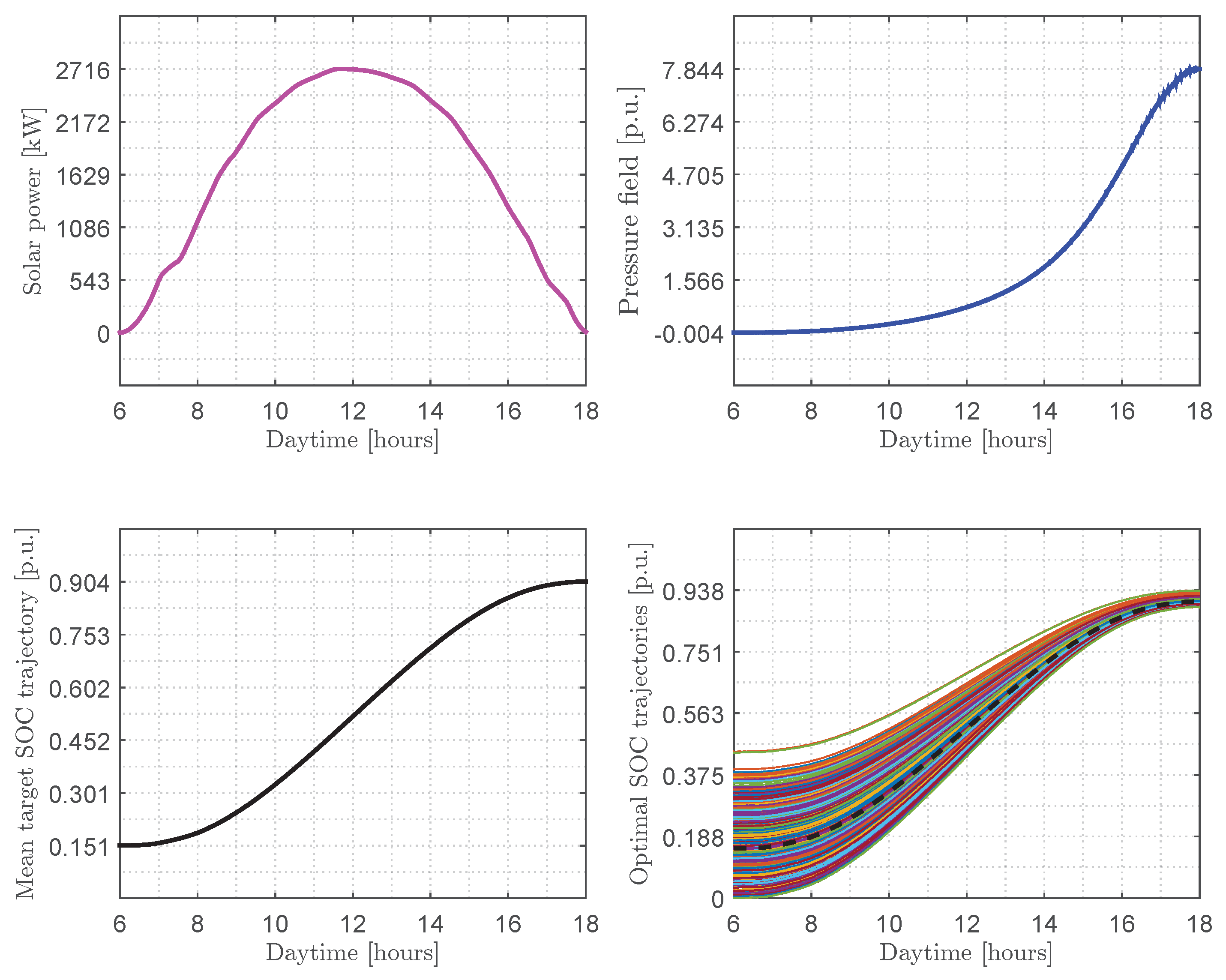
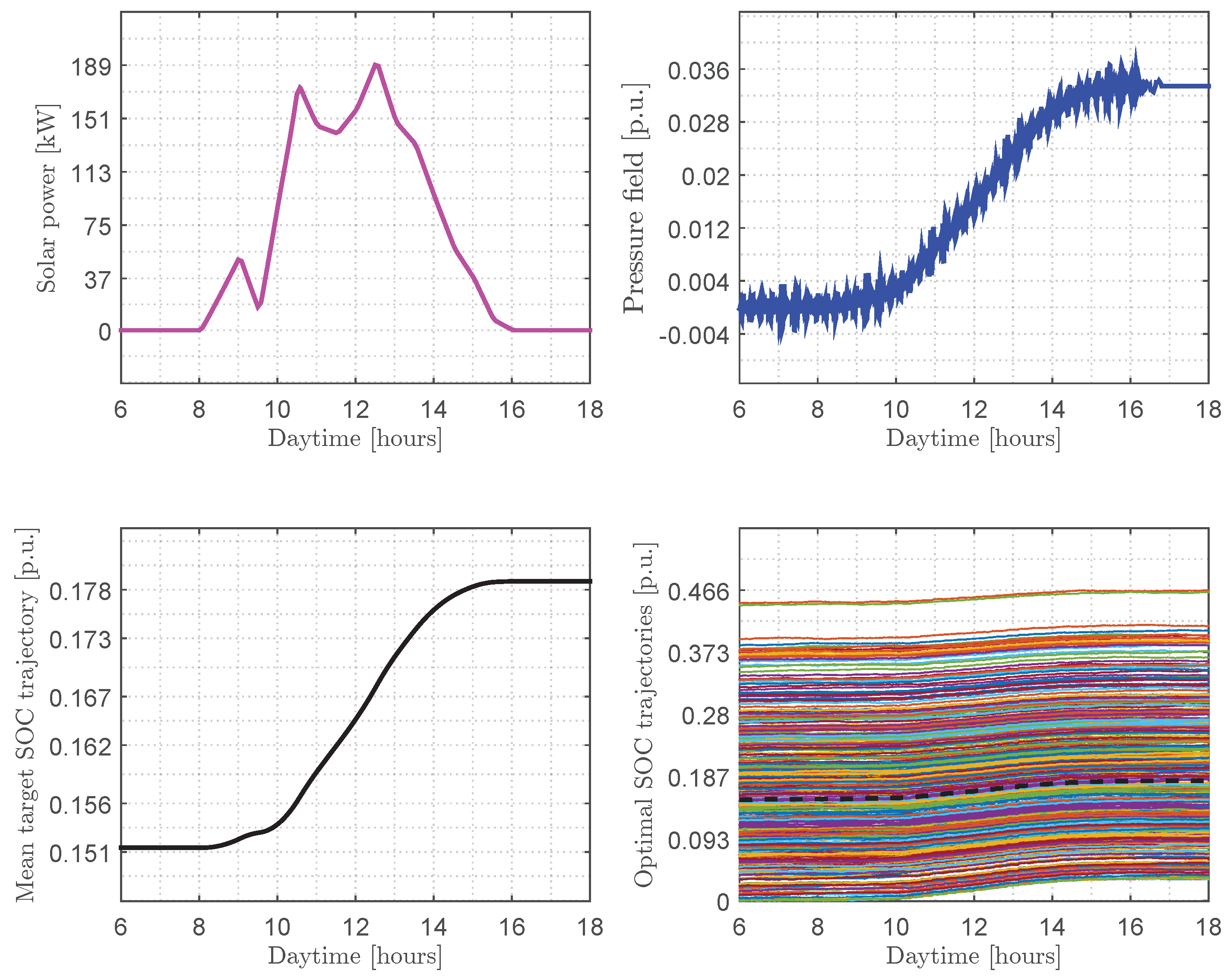
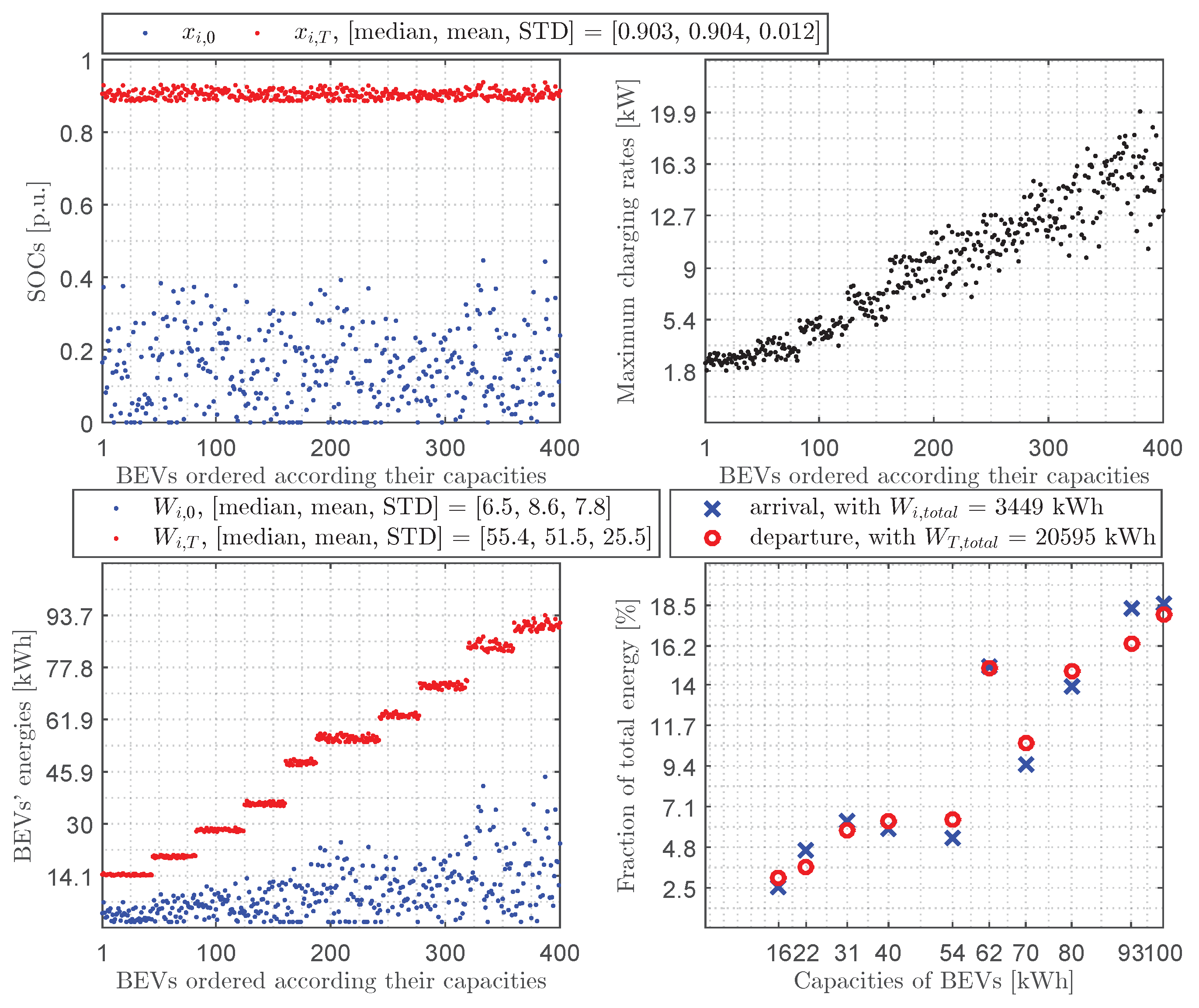
- Simulation prerequisites: We consider charging heterogeneous BEVs between and (i.e., the charging of all BEVs in the parking lot starts at 6 a.m. and stops at 6 p.m.) with a random normal distribution of SOCs upon arrival (with an average of and a standard deviation of ), which is the result of a daily traffic pattern from home to the parking lot, and h, and . The MFG inverse Nash algorithm and numerical results are carried out in Matlab 2021b software.
- (iii)
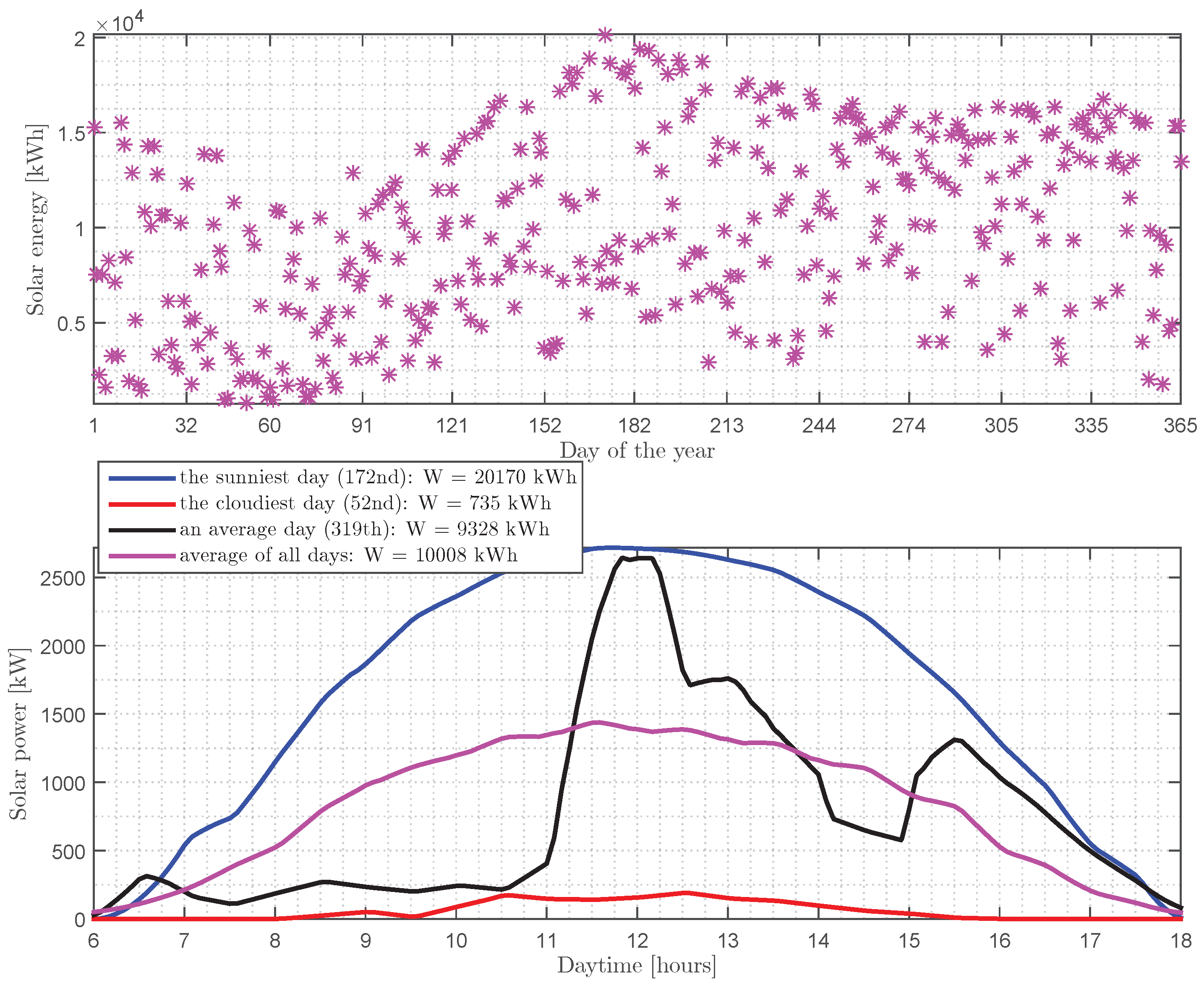
- Solar generation based on realistic data [28]: we consider installing 250 solar panels in a parking lot ( North, West) in the city of Montréal (Québec, Canada) to obtain, in a year, daily solar power curves and daily solar energies between 6 a.m. and 6 p.m., by using data from the Photovoltaic Geographical Information System (PVGIS) website and the Transient System Simulation (TRNSYS) tool.
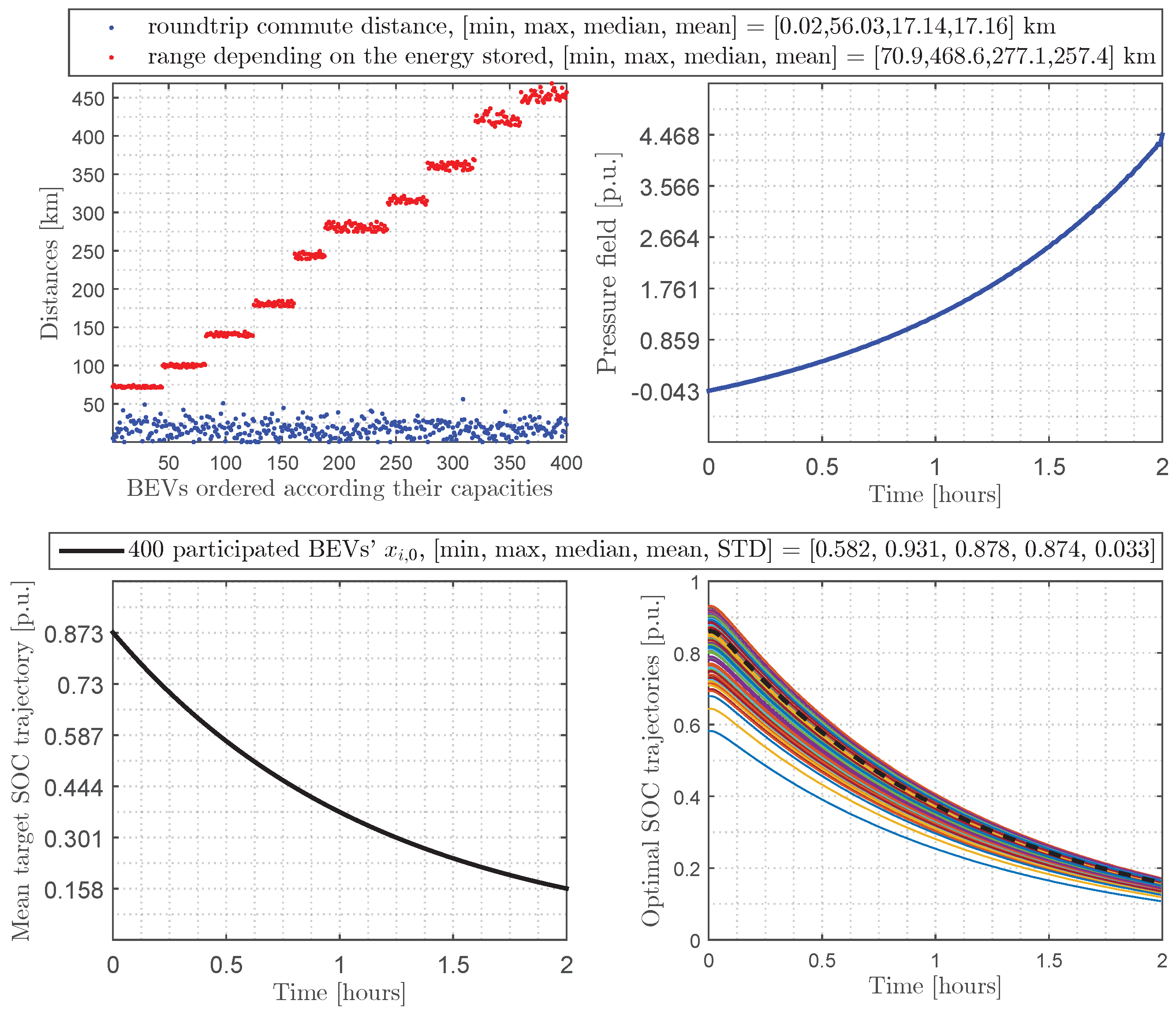
3.2. Calculation of the Average Target SOC Trajectory in the Case of Charging
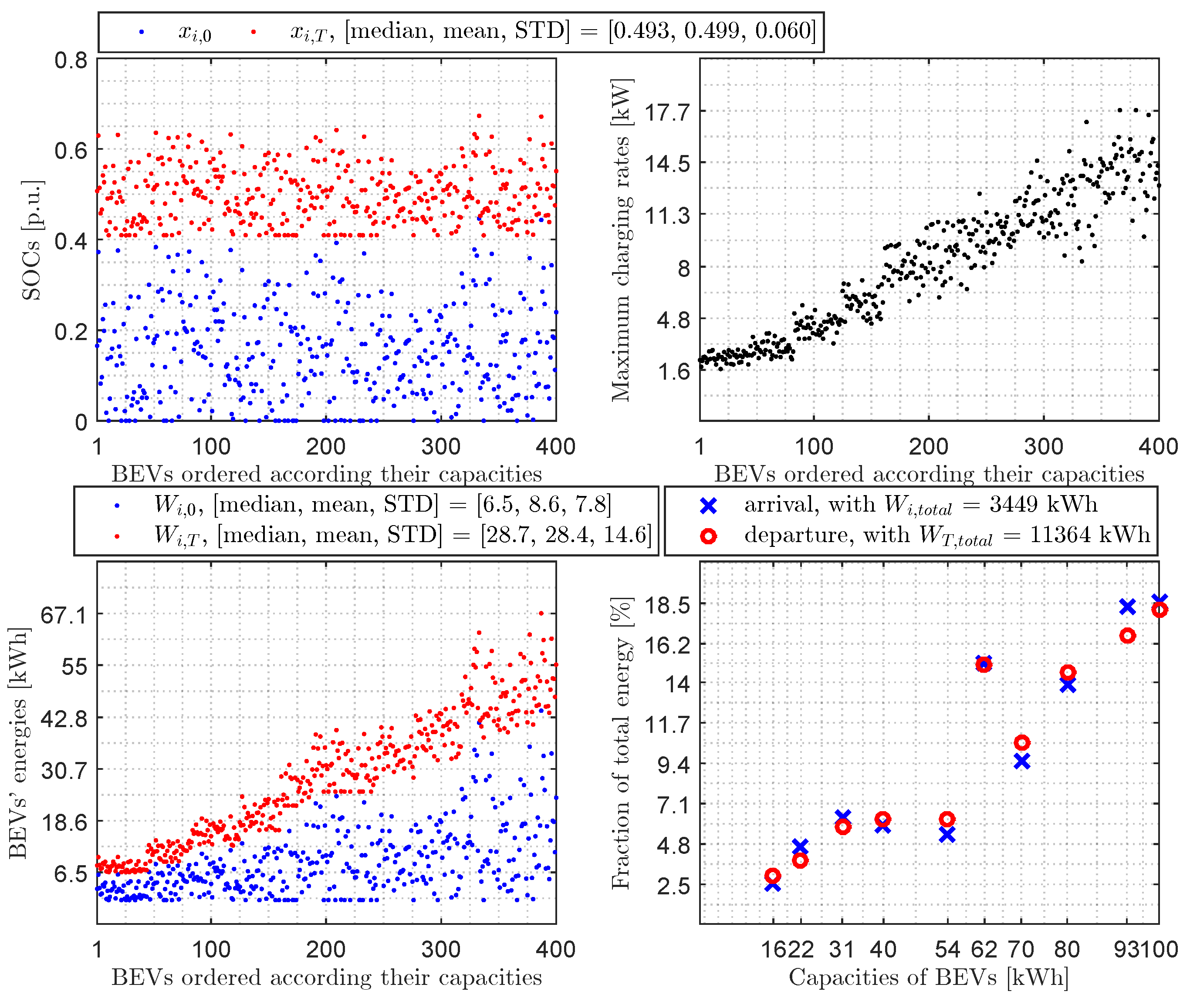
3.3. Numerical Results in the Case of Charging
4. Discharging a Large Population of Heterogeneous BEVs into the Grid
4.1. Experimental Platform and Data Sources in the Case of Discharging
- (i)
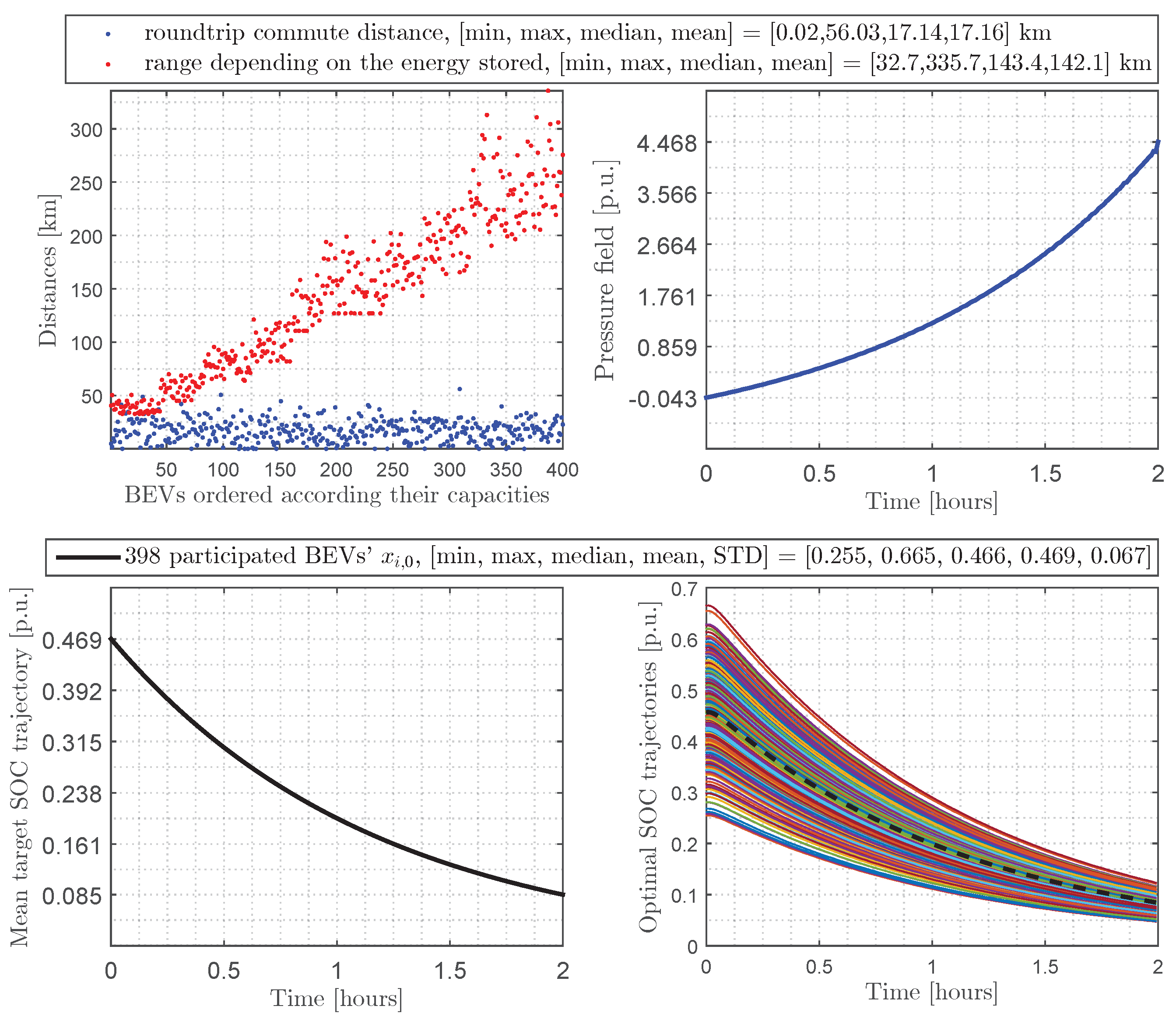
- Population of BEVs based on realistic data [56,57,58]: We consider BEVs with a charger efficiency and an average consumption of kWh/km. Each BEV could use at most a charger which can deliver up to kW of discharging rate (i.e., kW). Also, the commute distances are a random normal distribution with an average of 9 km and a standard deviation of 5 km. Therefore, a BEV with a roundtrip commute distance superior to its range according to its energy stored would not participate in the discharging operation into the grid during peak evening hours.
- (ii)
- Simulation prerequisites: We consider discharging all participating BEVs into their homes during the evening peak of 2 h (i.e., , ), and h, and . Finally, the MFG inverse Nash algorithm and numerical results are carried out in Matlab 2021b software.
4.2. Calculation of the Average Target SOC Trajectory in the Case of Discharging
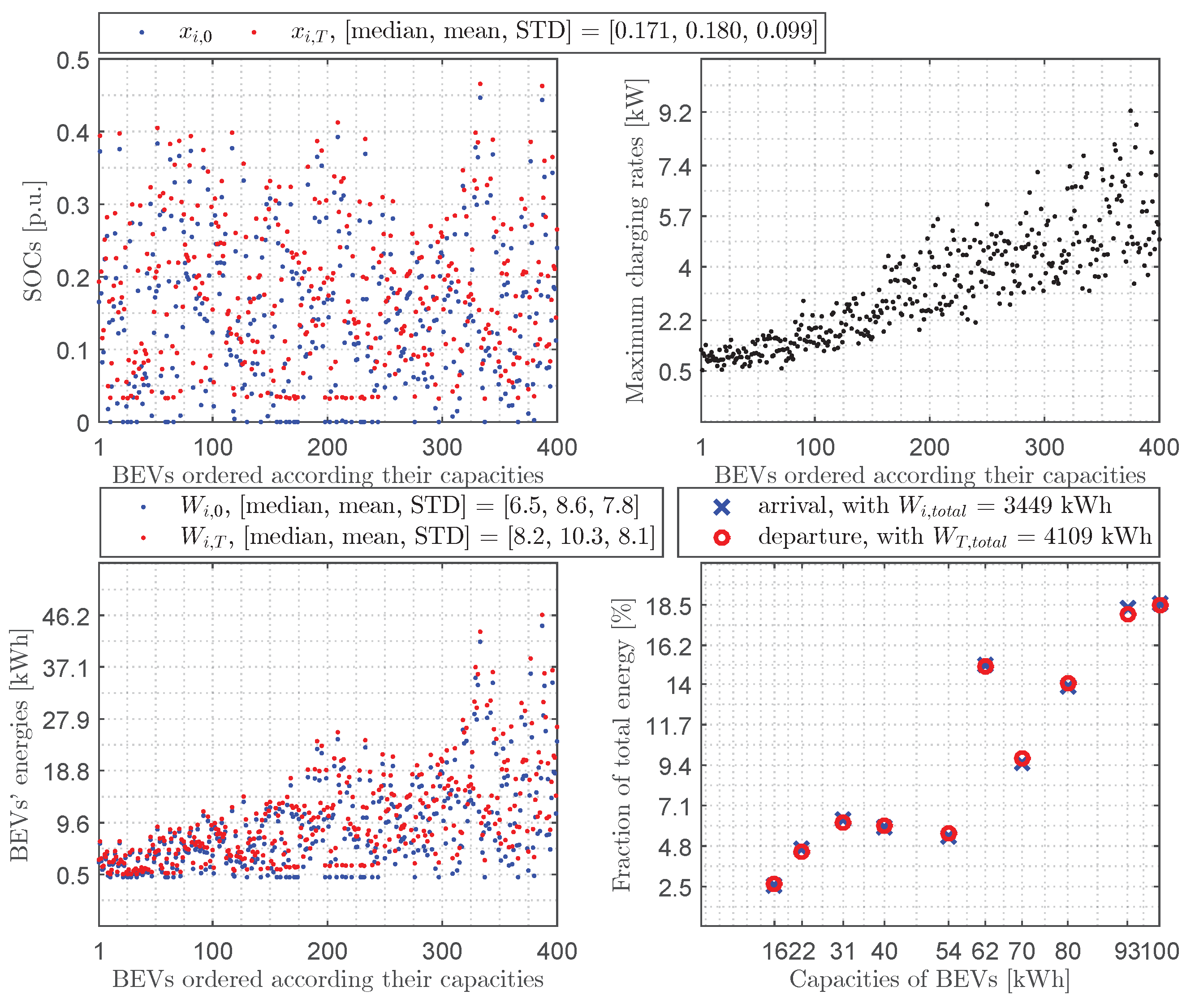
4.3. Numerical Results in the Case of Discharging
5. Conclusions
- (i)
- In the case of charging: we elevated the BEVs’ SOCs upon departure , by using all the solar energy in the parking lot, to a satisfactory level (on average, an increase of for the sunniest day, for an average day, and for the cloudiest day) while reducing their standard deviation regardless of their SOC upon arrival to maximize the number of participating BEVs, which would help to decongest the grid during peak evening hours.
- (ii)
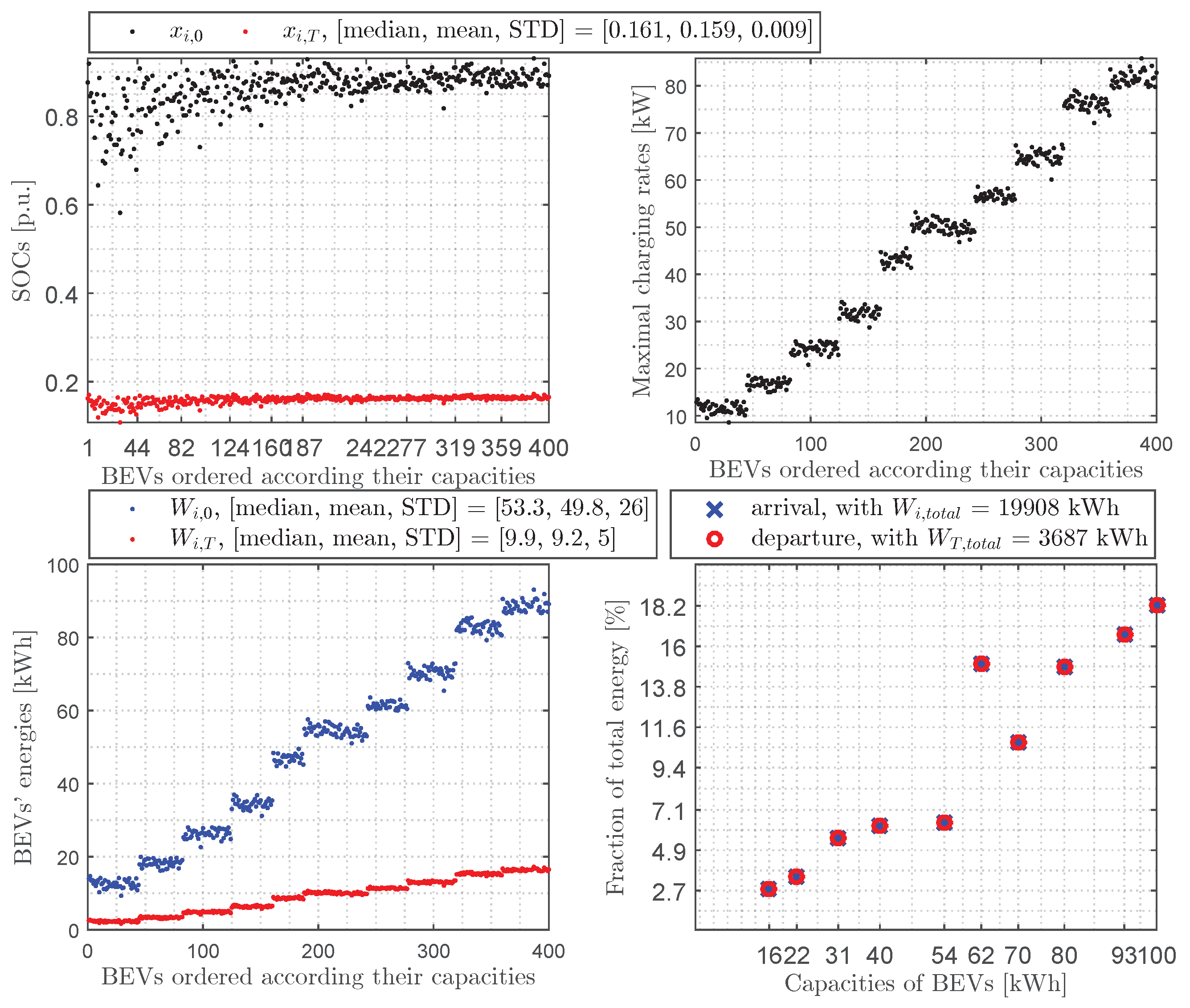
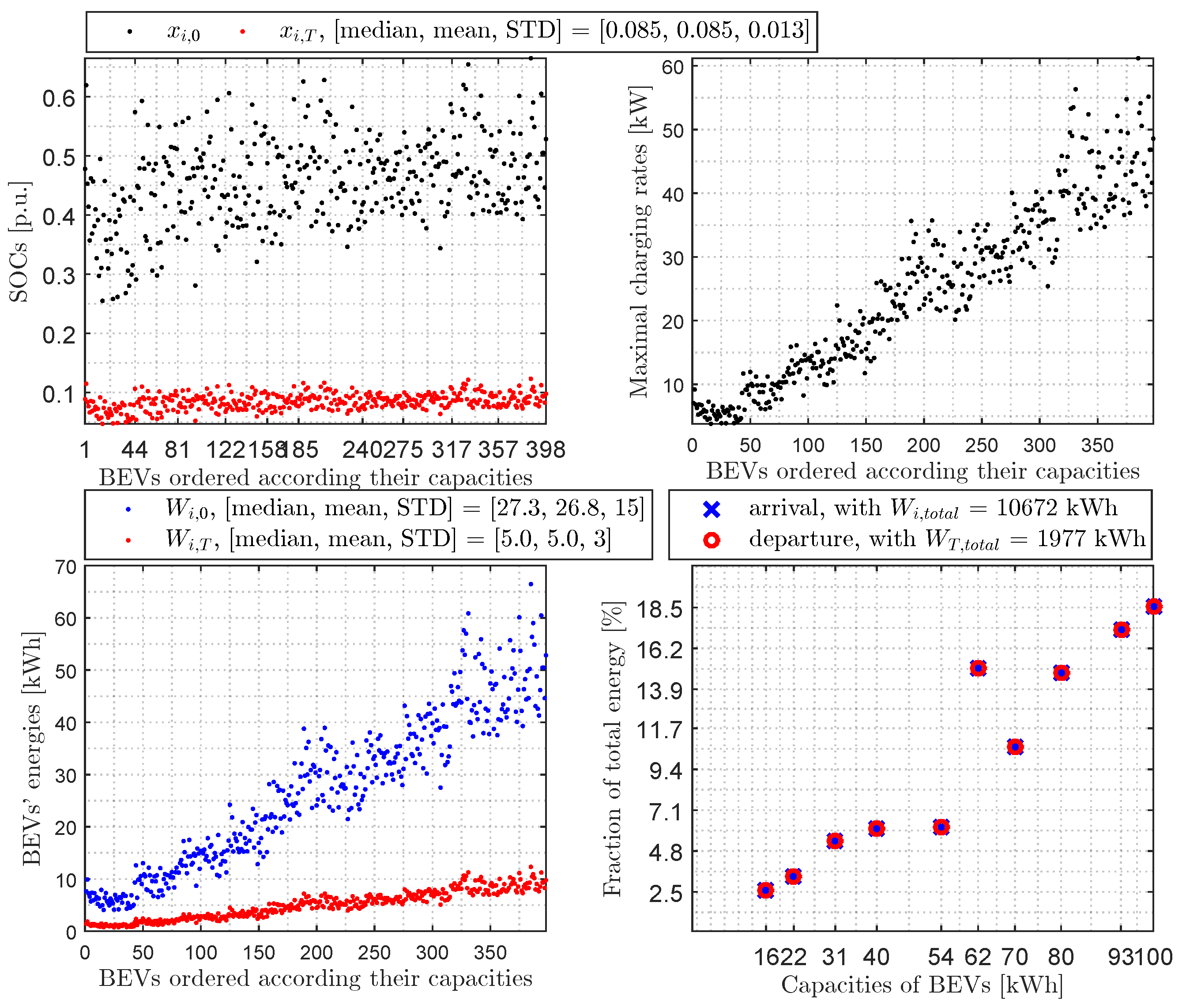
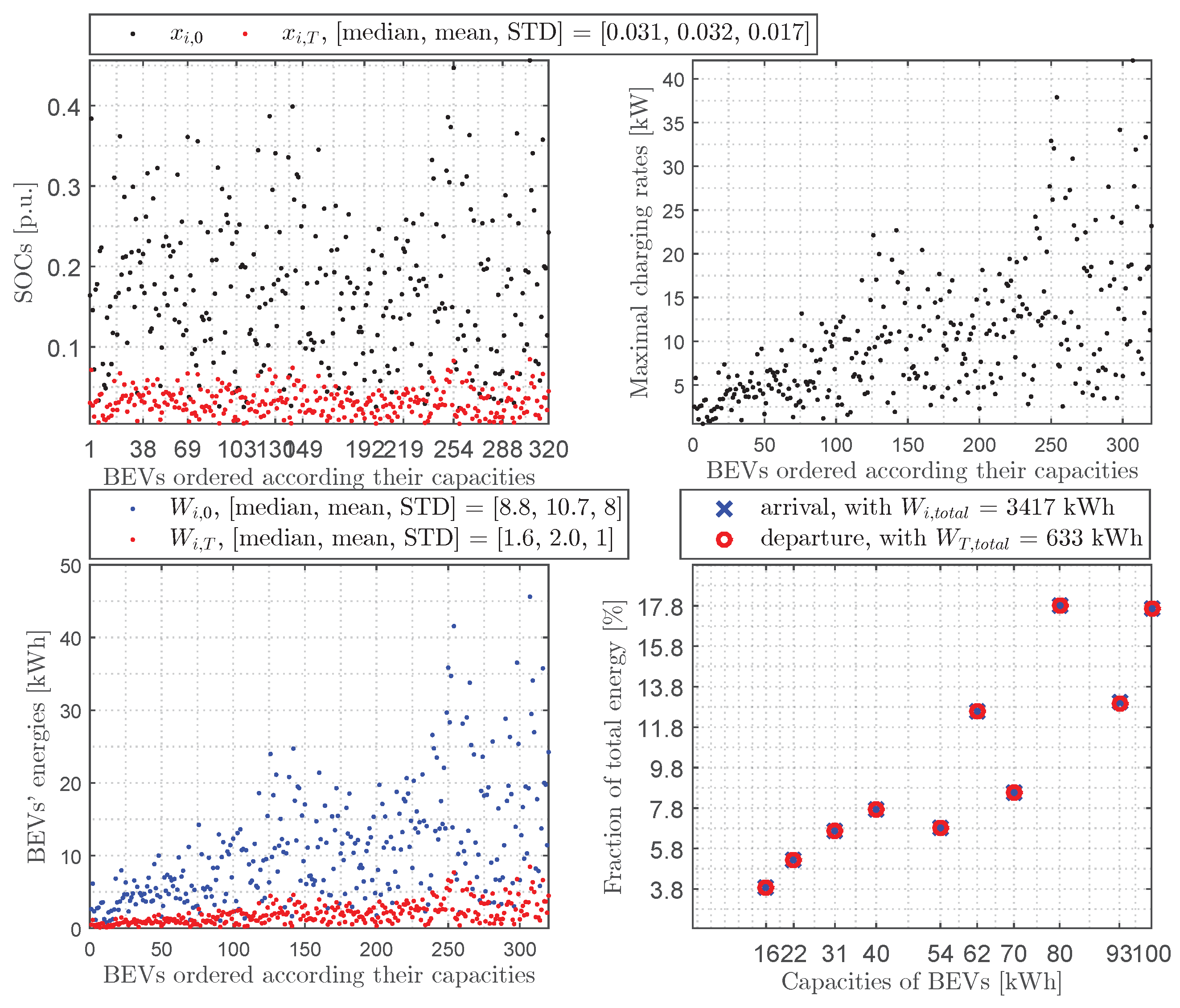
- In the case of discharging: we restored into the grid the same fraction of of the total energy of BEVs upon arrival for the three days.
- (i)
- In the case of charging: we achieved a strong to slight reduction in the standard deviation in the states of charge at the end, respectively, for the sunniest day (), an average day (), and the cloudiest day ().
- (ii)
- In the case of discharging: for the three days, we achieved the same reduction of in the standard deviation in the states of charge at the end and the same fractions of energies at the beginning and the end of discharging BEVs with the same battery capacity.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| mathematical expectation | |
| set of natural numbers without zero | |
| set of positive real numbers | |
| sum of Δ elements of | |
| differential of Δ | |
| integral of | |
| exponential of Δ | |
| natural logarithm of | |
| t | time in h |
| starting time | |
| T | length of the horizon |
| control horizon | |
| N | number of heterogeneous battery electric vehicles (BEVs) |
| a user of a BEV | |
| charger efficiency in pu/h | |
| battery capacity of a BEV in kWh | |
| number of BEVs per battery capacity | |
| n | number of elementary homogeneous batteries of 1 kWh |
| cost of BEV i to minimize | |
| discount coefficient for the convergence of cost | |
| charging or discharging rate of an elementary homogeneous battery at time t in kW | |
| optimal charging or discharging rate of an elementary homogeneous battery at time t | |
| optimal charging or discharging rate of BEV i at time t in kW | |
| maximum optimal charging or discharging rate of BEV i | |
| maximum optimal charging or discharging rate of BEVs per battery capacity | |
| physical maximum charging or discharging rate of BEVs | |
| solar power in the parking lot at time t | |
| W | total solar energy in the parking lot in kWh |
| energy of BEV i upon arrival | |
| total energy of BEVs upon arrival | |
| total energy of BEVs per battery capacity upon arrival | |
| energy of BEV i upon departure | |
| total energy of BEVs upon departure | |
| total energy of BEVs per battery capacity upon departure | |
| percentage fraction of from | |
| percentage fraction of from | |
| variation from to | |
| SOC of BEV i at time t in pu of capacity | |
| SOC of BEV i upon arrival | |
| SOC of BEV i upon departure | |
| average of BEVs’ SOCs upon arrival | |
| average of BEVs’ SOCs per battery capacity upon arrival | |
| average of BEVs’ SOCs upon departure | |
| average of BEVs’ SOCs per battery capacity upon departure | |
| percentage variation from to | |
| mathematical expectation of the SOCs of BEVs at time t | |
| target for the mean SOC of BEVs at time t | |
| target for the steady-state mean SOC of BEVs | |
| standard deviation in BEVs’ SOCs upon arrival | |
| standard deviation in BEVs’ SOCs per battery capacity upon arrival | |
| standard deviation in BEVs’ SOCs upon departure | |
| standard deviation in BEVs’ SOCs per battery capacity upon departure | |
| percentage variation from to | |
| pressure field trajectory of BEVs at time t | |
| steady-state pressure field of BEVs | |
| comfort coefficient of BEVs | |
| Brownian motion | |
| Brownian noise intensity | |
| r | charging or discharging rate penalty coefficient of BEVs |
| y | SOC value serving as a possible final destination for |
| V | optimal cost-to-go |
| coefficients of the quadratic form of V |
Appendix A. Mathematical Details of the MFG Inverse Nash Algorithm for Charging or Discharging a Large Population of Heterogeneous BEVs
Appendix A.1. Obtaining the Agent’s Best Response
Appendix A.2. Obtaining the Pressure Field by Inverse Nash Mechanism
Appendix A.3. Solving the Riccati Equation
Appendix A.4. Computing the Pressure Field
Appendix A.5. Computing the Agent’s Best Response
Appendix A.6. Guaranteeing the Existence of a Solution to the MFG Inverse Nash Problem
Appendix B. A Simpler Version of the MFG Inverse Nash Algorithm for Charging or Discharging Heterogeneous BEVs
| Algorithm A1 A Simpler Version of the MFG inverse Nash algorithm for Charging or Discharging Heterogeneous BEVs |
|
Appendix C. Detailed Numerical Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging Heterogeneous BEVs | [kWh] | 16 | 22 | 31 | 40 | 54 | 62 | 70 | 80 | 93 | 100 |
| 44 | 38 | 42 | 36 | 27 | 55 | 35 | 42 | 40 | 41 | ||
| [kWh] | 88 | 161 | 216 | 202 | 183 | 520 | 327 | 479 | 632 | 641 | |
| Sunniest day | |||||||||||
| – | – | – | – | – | – | – | – | – | |||
| [kWh] | 634 | 760 | 1179 | 1300 | 1314 | 3083 | 2210 | 3034 | 3371 | 3709 | |
| [kW] | |||||||||||
| Average day | |||||||||||
| – | – | – | – | – | – | – | – | – | |||
| [kWh] | 340 | 437 | 661 | 709 | 705 | 1703 | 1196 | 1659 | 1896 | 2057 | |
| [kW] | |||||||||||
| Cloudiest day | |||||||||||
| [kWh] | 109 | 184 | 253 | 244 | 227 | 618 | 400 | 578 | 740 | 759 | |
| [kW] | |||||||||||
| Discharging Heterogeneous BEVs | [kWh] | 16 | 22 | 31 | 40 | 54 | 62 | 70 | 80 | 93 | 100 |
| – | – | – | – | – | – | – | – | – | |||
| – | – | – | – | – | – | – | – | – | |||
| – | – | – | – | – | – | – | – | – | |||
| Sunniest day | 44 | 38 | 42 | 36 | 27 | 55 | 35 | 42 | 40 | 41 | |
| [kWh] | 553 | 693 | 1106 | 1242 | 1267 | 2992 | 2151 | 2959 | 3313 | 3633 | |
| [kWh] | 102 | 128 | 205 | 230 | 235 | 554 | 398 | 548 | 614 | 673 | |
| [kW] | |||||||||||
| Average day | 44 | 37 | 41 | 36 | 27 | 55 | 35 | 42 | 40 | 41 | |
| [kWh] | 269 | 357 | 577 | 651 | 658 | 1611 | 1137 | 1583 | 1839 | 1981 | |
| [kWh] | 50 | 66 | 107 | 120 | 122 | 298 | 211 | 293 | 340 | 367 | |
| [kW] | 12 | 17 | |||||||||
| Cloudiest day | 38 | 31 | 34 | 27 | 19 | 43 | 27 | 35 | 34 | 32 | |
| [kWh] | 105 | 133 | 175 | 185 | 203 | 401 | 267 | 565 | 439 | 603 | |
| [kWh] | 20 | 25 | 32 | 34 | 38 | 74 | 49 | 105 | 81 | 112 | |
| [kW] |
References
- Global EV Outlook 2024, IEA, Paris: Moving towards Increased Affordability. 2024. Available online: https://www.iea.org/reports/global-ev-outlook-2024 (accessed on 22 April 2024).
- EV30@30: A Campaign Launched under the Electric Vehicle Initiative. 2019. Available online: http://www.cleanenergyministerial.org/campaign-clean-energy-ministerial/ev3030-campaign (accessed on 22 April 2024).
- Su, W.; Wang, J.; Hu, Z. Planning, Control, and Management Strategies for Parking Lots for PEVs. In Plug in Electric Vehicles in Smart Grids: Integration Techniques; Rajakaruna, S., Shahnia, F., Gosh, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Chapter 3; pp. 61–98. [Google Scholar] [CrossRef]
- Olivella-Rosell, P.; Villafafila-Robles, R.; Sumper, A. Impact Evaluation of Plug-in Electric Vehicle on Power Systems. In Plug in Electric Vehicles in Smart Grids: Integration Techniques; Rajakaruna, S., Shahnia, F., Gosh, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Chapter 6; pp. 149–178. [Google Scholar]
- Erickson, L.; Ma, S. Solar-Powered Charging Networks for Electric Vehicles. Energies 2021, 14, 966. [Google Scholar] [CrossRef]
- Bauer, P. Lecture Notes: Smart Charging and Vehicle-to-Grid. 2021. Available online: https://delftxdownloads.tudelft.nl/ECARS2x_Electric_Cars_Technology/Module_3/eCARS2x_2018_T3-4_Smart_charging_and_V2G-slides.pdf (accessed on 22 April 2024).
- Saber, A.Y.; Venayagamoorthy, G.K. Resource Scheduling under Uncertainty in a Smart Grid With Renewables and Plug-in Vehicles. IEEE Syst. J. 2012, 6, 103–109. [Google Scholar] [CrossRef]
- Denholm, P.; O’Connell, M.; Brinkman, G.; Jorgenson, J. Overgeneration from Solar Energy in California: A Field Guide to the Duck Chart; Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2015. [Google Scholar]
- Drude, L.; Pereira Junior, L.C.; Rüther, R. Photovoltaics (PV) and electric vehicle-to-grid (V2G) strategies for peak demand reduction in urban regions in Brazil in a smart grid environment. Renew. Energy 2014, 68, 443–451. [Google Scholar] [CrossRef]
- Rüther, R.; Pereira Junior, L.C.; Bittencourt, A.H.; Drude, L.; dos Santos, I.P. Strategies for plug-in electric vehicles to grid (V2G) and photovoltaics (PV) for peak demand reduction in urban regions in a smart grid environment. In Plug in Electric Vehicles in Smart Grids: Integration Techniques; Rajakaruna, S., Shahnia, F., Gosh, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Chapter 7; pp. 179–219. [Google Scholar] [CrossRef]
- Chandra Mouli, G.; Bauer, P.; Zeman, M. System design for a solar powered electric vehicle charging station for workplaces. Appl. Energy 2016, 168, 434–443. [Google Scholar] [CrossRef]
- Nunes, P.; Figueiredo, R.; Brito, M.C. The use of parking lots to solar-charge electric vehicles. Renew. Sustain. Energy Rev. 2016, 66, 679–693. [Google Scholar] [CrossRef]
- Figueiredo, R.; Nunes, P.; Brito, M.C. The feasibility of solar parking lots for electric vehicles. Energy 2017, 140, 1182–1197. [Google Scholar] [CrossRef]
- Sundararajan, R.S.; Iqbal, M.T. Design of Solar Parking Lot for 20 Electric Vehicles in St John’s NL. In Proceedings of the 29th Annual Newfoundland Electrical and Computer Engineering Conference, St. John’s, NL, Canada, 19 November 2020. [Google Scholar]
- Deshmukh, S.S.; Pearce, J.M. Electric vehicle charging potential from retail parking lot solar photovoltaic awnings. Renew. Energy 2021, 169, 608–617. [Google Scholar] [CrossRef]
- Alexeenko, P.; Bitar, E. Achieving Reliable Coordination of Residential Plug-in Electric Vehicle Charging: A Pilot Study. arXiv 2021, arXiv:2112.04559. [Google Scholar] [CrossRef]
- Canopied Parking Lots Fitted with Solar Panels Could Anchor Vehicle Charging Stations and Microgrids. 2022. Available online: https://www.asme.org/topics-resources/content/parking-lot-power (accessed on 22 April 2024).
- The Overlooked Solar Power Potential of America’s Parking Lots. 2022. Available online: https://time.com/6239651/solar-parking-lots-france-us/ (accessed on 22 April 2024).
- Solar Trees Could Soon Be Charging Your Car. 2023. Available online: https://www.cnn.com/2023/05/30/world/solar-tree-electric-vehicle-charging-spc-intl/index.html (accessed on 22 April 2024).
- Giliomee, J.H.; Booysen, M.J. Grid-Sim: Simulating Electric Fleet Charging with Renewable Generation and Battery Storage. World Electr. Veh. J. 2023, 14, 274. [Google Scholar] [CrossRef]
- Makeen, P.; Ghali, H.A.; Memon, S.; Duan, F. Insightful Electric Vehicle Utility Grid Aggregator Methodology Based on the G2V and V2G Technologies in Egypt. Sustainability 2023, 15, 1283. [Google Scholar] [CrossRef]
- Alinejad, M.; Rezaei, O.; Habibifar, R.; Azimian, M. A Charge/Discharge Plan for Electric Vehicles in an Intelligent Parking Lot Considering Destructive Random Decisions, and V2G and V2V Energy Transfer Modes. Sustainability 2022, 14, 12816. [Google Scholar] [CrossRef]
- Mohammad, A.; Zuhaib, M.; Ashraf, I.; Alsultan, M.; Ahmad, S.; Sarwar, A.; Abdollahian, M. Integration of Electric Vehicles and Energy Storage System in Home Energy Management System with Home to Grid Capability. Energies 2021, 14, 8557. [Google Scholar] [CrossRef]
- Ravi, S.S.; Aziz, M. Utilization of Electric Vehicles for Vehicle-to-Grid Services: Progress and Perspectives. Energies 2022, 15, 589. [Google Scholar] [CrossRef]
- Waldron, J.; Rodrigues, L.; Gillott, M.; Naylor, S.; Shipman, R. The Role of Electric Vehicle Charging Technologies in the Decarbonisation of the Energy Grid. Energies 2022, 15, 2447. [Google Scholar] [CrossRef]
- Ahsan, S.M.; Khan, H.A.; Sohaib, S.; Hashmi, A.M. Optimized Power Dispatch for Smart Building and Electric Vehicles with V2V, V2B and V2G Operations. Energies 2023, 16, 4884. [Google Scholar] [CrossRef]
- Mugisho Muhindo, S.; Malhamé, R.P.; Joós, G. Mean Field Game-based control of sharing daily solar energy between electric vehicles in a parking lot. Les Cahiers du GERAD; G-2021-29; Groupe d’études et de Recherche en Analyse des Décisions (GERAD): Montréal, QC, Canada, 2021. [Google Scholar]
- Muhindo, S.M.; Malhamé, R.P.; Joos, G. A Novel Mean Field Game-Based Strategy for Charging Electric Vehicles in Solar Powered Parking Lots. Energies 2021, 14, 8517. [Google Scholar] [CrossRef]
- Lee, S.; Iyengar, S.; Irwin, D.; Shenoy, P. Shared solar-powered EV charging stations: Feasibility and benefits. In Proceedings of the 2016 Seventh International Green and Sustainable Computing Conference (IGSC), Hangzhou, China, 7–9 November 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Zhou, Y.; Maxemchuk, N.; Qian, X.; Mohammed, Y. A weighted fair queuing algorithm for charging electric vehicles on a smart grid. In Proceedings of the 2013 IEEE Online Conference on Green Communications (OnlineGreenComm), Piscataway, NJ, USA, 29–31 October 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Zhou, Y.; Maxemchuk, N.; Qian, X.; Wang, C. The fair distribution of power to electric vehicles: An alternative to pricing. In Proceedings of the 2014 IEEE International Conference on Smart Grid Communications (SmartGridComm), Venice, Italy, 3–6 November 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Wi, Y.M.; Lee, J.U.; Joo, S.K. Electric vehicle charging method for smart homes/buildings with a photovoltaic system. IEEE Trans. Consum. Electron. 2013, 59, 323–328. [Google Scholar] [CrossRef]
- Tuchnitz, F.; Ebell, N.; Schlund, J.; Pruckner, M. Development and Evaluation of a Smart Charging Strategy for an Electric Vehicle Fleet Based on Reinforcement Learning. Appl. Energy 2021, 285, 116382. [Google Scholar] [CrossRef]
- Nguyen, H.; Zhang, C.; Mahmud, M.A. Smart Charging and Discharging of Electric Vehicles to Support Grid with High Penetration of Renewable Energy. IFAC Proc. Vol. 2014, 47, 8604–8609. [Google Scholar] [CrossRef]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized charging control of large populations of plug-in electric vehicles. IEEE Trans. Control Syst. Technol. 2013, 21, 67–78. [Google Scholar] [CrossRef]
- Xydas, E.; Marmaras, C.; Cipcigan, L.M. A multi-agent based scheduling algorithm for adaptive electric vehicles charging. Appl. Energy 2016, 177, 354–365. [Google Scholar] [CrossRef]
- Khodayar, M.E.; Wu, L.; Shahidehpour, M. Hourly Coordination of Electric Vehicle Operation and Volatile Wind Power Generation in SCUC. IEEE Trans. Smart Grid 2012, 3, 1271–1279. [Google Scholar] [CrossRef]
- Huang, M.; Malhamé, R.P.; Caines, P.E. Large population stochastic dynamic games: Closed-loop McKean-Vlasov systems and the Nash certainty equivalence principle. Commun. Inf. Syst. 2006, 6, 221–252. [Google Scholar]
- Huang, M.; Caines, P.E.; Malhamé, R.P. Large-Population Cost-Coupled LQG Problems with Nonuniform Agents: Individual-Mass Behavior and Decentralized ε-Nash Equilibria. IEEE Trans. Autom. Control 2007, 52, 1560–1571. [Google Scholar] [CrossRef]
- Lasry, J.M.; Lions, P.L. Jeux à champ moyen. I—Le cas stationnaire. Comptes Rendus Math. 2006, 343, 619–625. [Google Scholar] [CrossRef]
- Lasry, J.M.; Lions, P.L. Jeux à champ moyen. II—Horizon fini et contrôle optimal. Comptes Rendus Math. 2006, 343, 679–684. [Google Scholar] [CrossRef]
- Lasry, J.M.; Lions, P.L. Mean field games. Jpn. J. Math. 2007, 2, 229–260. [Google Scholar] [CrossRef]
- Kizilkale, A.C.; Malhamé, R.P. Collective Target Tracking Mean Field Control for Markovian Jump-Driven Models of Electric Water Heating Loads. IFAC Proc. Vol. 2014, 47, 559–584. [Google Scholar] [CrossRef]
- Kizilkale, A.C.; Salhab, R.; Malhamé, R.P. An integral control formulation of mean field game based large scale coordination of loads in smart grids. Automatica 2019, 100, 312–322. [Google Scholar] [CrossRef]
- Lenet, Q.; Nazir, M.S.; Malhamé, R.P. An Inverse Nash Mean Field Game-based Strategy for the Decentralized Control of Thermostatic Loads. In Proceedings of the 60th IEEE Conference on Decision and Control (CDC 2021), Austin, TX, USA, 14–17 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 4929–4935. [Google Scholar] [CrossRef]
- Saad, W.; Han, Z.; Poor, H.V.; Başar, T. A noncooperative game for double auction-based energy trading between PHEVs and distribution grids. In Proceedings of the 2011 IEEE International Conference on Smart Grid Communications (SmartGridComm), Brussels, Belgium, 17–20 October 2011; pp. 267–272. [Google Scholar] [CrossRef]
- Couillet, R.; Perlaza, S.M.; Tembine, H.; Debbah, M. A mean field game analysis of electric vehicles in the smart grid. In Proceedings of the 2012 Proceedings IEEE INFOCOM Workshops, Orlando, FL, USA, 25–30 March 2012; pp. 79–84. [Google Scholar] [CrossRef]
- Ma, Z.; Ran, L. Game-Based Valley-Fill Charging Coordination for Large-Population Plug-in Electric Vehicles. Asian J. Control 2015, 5, 2010–2018. [Google Scholar] [CrossRef]
- Parise, F.; Colombino, M.; Grammatico, S.; Lygeros, J. Mean field constrained charging policy for large populations of Plug-in Electric Vehicles. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 5101–5106. [Google Scholar] [CrossRef]
- Grammatico, S.; Parise, F.; Colombino, M.; Lygeros, J. Decentralized convergence to Nash equilibria in constrained deterministic mean field control. IEEE Trans. Autom. Control 2015, 61, 3315–3329. [Google Scholar] [CrossRef]
- Zhu, Z.; Lambotharan, S.; Chin, W.H.; Fan, Z. A Mean Field Game Theoretic Approach to Electric Vehicles Charging. IEEE Access 2016, 4, 3501–3510. [Google Scholar] [CrossRef]
- Tajeddini, M.A.; Kebriaei, H. A Mean-Field Game Method for Decentralized Charging Coordination of a Large Population of Plug-in Electric Vehicles. IEEE Syst. J. 2019, 13, 854–863. [Google Scholar] [CrossRef]
- Séguret, A.; Wan, C.; Alasseur, C. A mean field control approach for smart charging with aggregate power demand constraints. In Proceedings of the 2021 IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Espoo, Finland, 18–21 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Séguret, A. Mean Field Approximation of an Optimal Control Problem for the Continuity Equation Arising in Smart Charging. Appl. Math. Optim. 2023, 88, 79. [Google Scholar] [CrossRef]
- Xu, F.; Zhao, K.; Fu, Q. Mobility-aware optimal trade planning and mean field game-based decentralized charging control for large-scale electric vehicles. Asian J. Control 2024, 26, 598–616. [Google Scholar] [CrossRef]
- Electric Vehicle Database. Available online: https://ev-database.org/ (accessed on 22 April 2024).
- Electric Vehicle Specs. Available online: https://www.ultimatespecs.com/electric-hybrid-cars (accessed on 22 April 2024).
- Savage, K. Commuting within Canada’s Largest Cities. 2016. Available online: https://www150.statcan.gc.ca/n1/pub/75-006-x/2019001/article/00008-eng.htm (accessed on 22 April 2024).
- Anderson, B.D.; Moore, J.B. Optimal Control, Linear Quadratic Methods, 12th ed.; Dover Publications: New York, NY, USA, 2007. [Google Scholar]
- Jacobson, D. New conditions for boundedness of the solution of a matrix Riccati differential equation. J. Differ. Equ. 1970, 8, 258–263. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muhindo, S.M. Mean Field Game-Based Algorithms for Charging in Solar-Powered Parking Lots and Discharging into Homes a Large Population of Heterogeneous Electric Vehicles. Energies 2024, 17, 2118. https://doi.org/10.3390/en17092118
Muhindo SM. Mean Field Game-Based Algorithms for Charging in Solar-Powered Parking Lots and Discharging into Homes a Large Population of Heterogeneous Electric Vehicles. Energies. 2024; 17(9):2118. https://doi.org/10.3390/en17092118
Chicago/Turabian StyleMuhindo, Samuel M. 2024. "Mean Field Game-Based Algorithms for Charging in Solar-Powered Parking Lots and Discharging into Homes a Large Population of Heterogeneous Electric Vehicles" Energies 17, no. 9: 2118. https://doi.org/10.3390/en17092118
APA StyleMuhindo, S. M. (2024). Mean Field Game-Based Algorithms for Charging in Solar-Powered Parking Lots and Discharging into Homes a Large Population of Heterogeneous Electric Vehicles. Energies, 17(9), 2118. https://doi.org/10.3390/en17092118