2. Materials and Methods
In this section, the heat transfer problem for an F1 engine is methodically formulated and resolved through analytical means. The primary objective of this study is to compute the heat transferred to both the engine oil and the engine coolant, with a particular emphasis on assessing the time-averaged power exchanged during a racing lap as a pivotal metric in sizing the cooling system.
In order to uphold heightened precision in the model estimations, only radiative fluxes are excluded, given their significantly lesser contribution compared to conductive and convective ones in the total power heat released by an internal combustion engine [
9]. Consequently, the heat exchanges between a fluid and a solid component are depicted as purely convective fluxes, while losses within the solid parts are modeled as purely conductive ones.
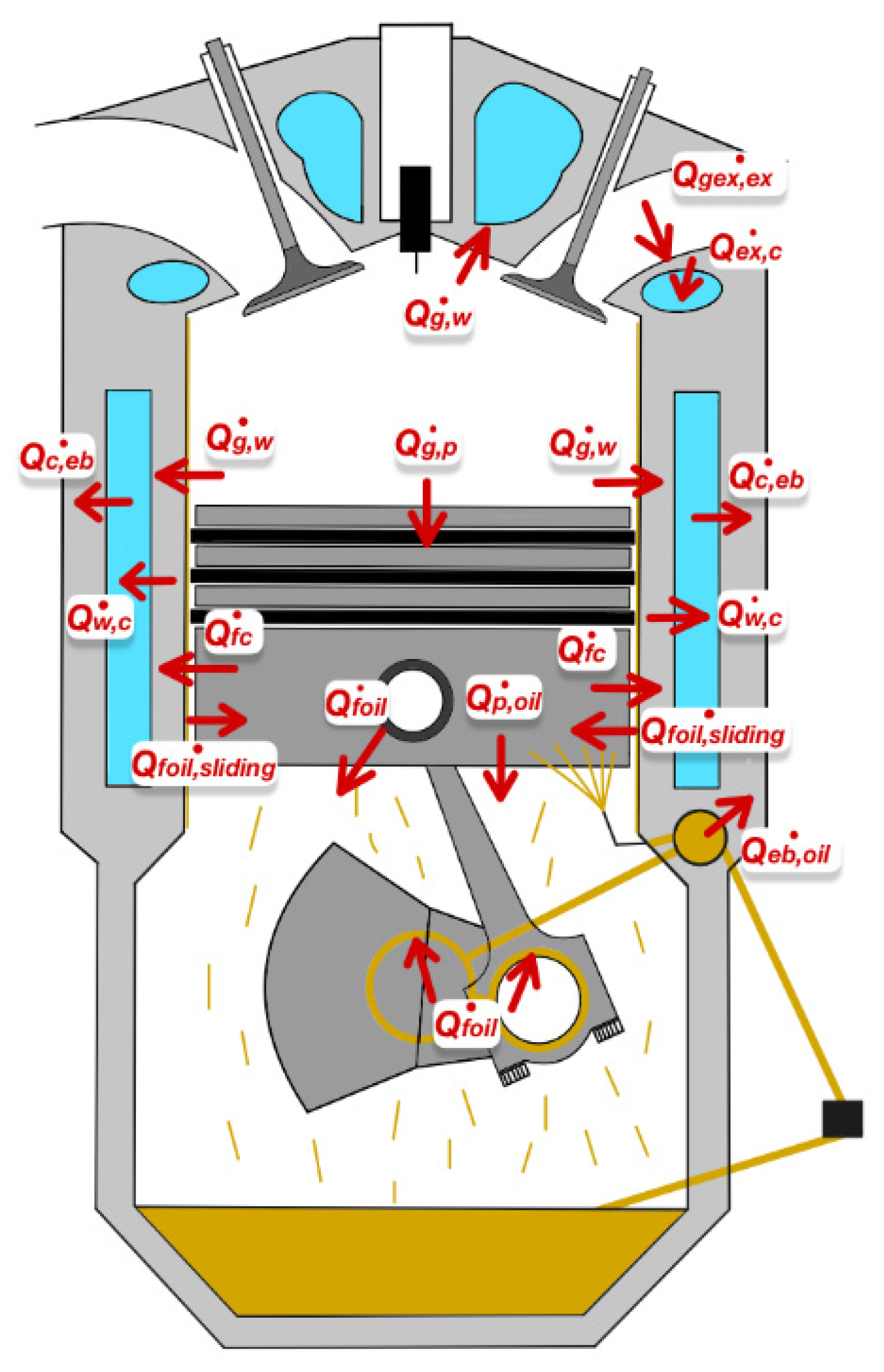
Figure 1 shows the envisaged heat exchanges, with arrows denoting convective fluxes, while conductive losses remain internal to the respective blocks.
The developed model adopts a single-zone approach [
10,
11], where no temperature gradient is applied to the cylinder walls. This approach is favored over a dual-zone mode [
10] due to its ability to maintain a high precision level with reduced complexity. The assumption of the absence of a temperature gradient along the piston width is supported by the narrow width of the cylinder walls.
While a substantial temperature gradient exists along the cylinder axis [
12], the simplicity of the single-zone approach is preserved by assuming that in-cylinder gases simultaneously exchange heat with the entire surface of the cylinder walls. The crudity of this assumption is smoothed assuming this occurs while the gases’ temperature equals the mean temperature value over multiple engine strokes.
In contrast to the model developed in [
13], no experimental data were available for the heat flux between the cylinder gases and the cylinder walls. Consequently, a decision was made to compute it directly within the model, starting from input data derivable from car telemetry or other existing models. As mentioned above, the heat exchanged between moving gas and a solid is convective [
10]; therefore, the heat flow between the in-cylinder gases and the cylinder walls can be computed, at a generic time
t, as reported in Equation (1):
where
is the heat transfer coefficient between the gases and the cylinder walls,
the cylinder walls area,
and
are the gases and walls temperature, respectively. The cylinder gas temperature is determined by multiplying the maximum temperature reached inside the cylinder by a correction factor. The maximum gas temperature is computed considering the gases as ideal:
Here,
denotes the maximum pressure inside the cylinder during an engine cycle at time
, and
is the cylinder volume corresponding to the pressure peak. The pressure peak aligns with the motored pressure under cut-off conditions or misfire (absence of regular combustion), while in running conditions, it is the motored pressure plus the combustion pressure [
14]. For an F1 engine, the total mass trapped in the cylinder (
) comprises fresh air, fuel, and residual gases from the previous cycle. Unlike a series engine, the absence of an exhaust gas recirculation (EGR) system in an F1 engine allows excluding this contribution.
The trapped mass is computed using lookup tables in this methodology that could be experimentally derived while running the engine in static working conditions at the test bench. However, since F1 regulations limit the test bench hours, the maps are obtained from a validated 1D model simulating the engine at different engine loads, rotational speeds, spark advance angles, and lambda values.
The nonlinear relationship between the air mass trapped and input variables necessitates two maps: a base map in function of the engine load and the engine rotational speed, and a correction factor map in function of lambda.
As stated earlier, the fuel mass is added to the masses of fresh air and residuals to compute the total trapped mass. The fuel mass is estimated as follows:
Here,
denotes the maximum instantaneous mass flow rate (expressed in kg/h), constrained by regulations through the specified equations:
As can be observed, the mass flow rate is capped at 100 kg/h above rpm, linearly decreasing at lower engine speeds. represents the actual percentage of FIA fuel mass flow rate injected into the cylinder, while is the engine rotational speed expressed in . Constants are introduced for unit conversion of the engine speed in and fuel mass per cylinder per cycle computation.
To address the dynamic behavior of the engine in cut-off conditions, where fuel injection cessation leads to a gradual slowdown and reduced air flow cycle by cycle, a transfer function has been introduced.
The pressure peak in Equation (2) is computed through two lookup tables: a base map involving the total air mass trapped, the temperature of the air in the engine after the compressor and the intercooler, engine load, and engine rotational speed; and a correction factor map dependent on the air-to-fuel ratio, the center of combustion (MFB50, crank angle at which 50% of the fuel burned is reached), and mass of residual gases.
The pressure peak base is determined from combustion heat release curves using the first law of thermodynamics [
15,
16], considering that the rate of increase of the combustion heat release curves at each crank angle
can be obtained as [
17]:
where
is the pressure inside the cylinder at each crank angle,
is the rate of change of pressure,
is the exposed cylinder volume and
is its rate of change.
Equation (6) allows the computation of the in-cylinder pressure variation during an engine cycle, with initial conditions set at the intake valve closure (
IVC):
The pressure at
IVC can be easily estimated:
is available from the previous calculations,
is the gas constant,
is the temperature in the intake manifold already used in the mass-trapped computation and
is the cylinder volume at intake valve closure:
In general, the swept exposed volume is computed as a combination of the combustion chamber volume and the piston’s swept distance. The first one is computed as the piston area times the stroke over the compression ratio minus one, where the compression ratio is the cylinder volume displacement over the combustion chamber volume. The second term is the piston area times the swept distance, which is identified as the distance of the piston from the top dead center (TDC):
with
being the ratio of the crank radius over the connecting rod length.
The evolution of the pressure inside the cylinder is used to estimate the peak pressure at each operating condition, considering the maximum of each pressure curve in the function of the crank angle.
The correction factor map, akin to the air mass trapped map, is computed from 1D maps.
For cut-off conditions, where the pressure in the cylinder is governed solely by the motored pressure, a dedicated map is created. A delay is introduced to replicate the dynamic behavior when the engine is turned off. The motored pressure map is computed using the polytropic expression describing the thermodynamic process:
Recalling Equation (2), the determination of
is still undefined. The cylinder volume at the pressure peak is computed as the volume at MFB50, increased by a calibrated gain, considering that in gasoline engines, the pressure peak often occurs shortly after MFB50 [
18]. Similar to the air mass trapped and pressure peak, the temperature behavior in cut-off conditions is modeled using a transfer function.
When the engine is restarted, a scenario resembling the engine emptying dynamic unfolds. Engine filling is not instantaneous due to throttle valve limitations, and a transfer function is introduced to slow down the in-cylinder temperature increase in relation to fuel injection increase.
Gas temperature is crucial for computing the heat transferred by the gases to the cylinder walls and evaluating the heat flux from the gases to the piston through Equation (10), where
is the heat transfer coefficient between the gases and the piston.
Similar to the cylinder walls, the piston’s temperature (
) is assumed to be homogeneous along its structure. Despite a temperature gradient of around 120–180 °C along the piston, the gradient neglect does not compromise model precision. Unlike [
19], the heat exchange is modeled without considering the boundary layer effect, but this simplification does not affect model outputs.
In series aspirated engines, the exhaust gases’ enthalpy is considered a mere loss: it is used to heat the gases rather than generate propulsive power. However, in F1 power units, this energy is recovered to compress incoming air, increase the volumetric efficiency, and recharge the battery or boost the vehicle through the MGU-H (motor generator unit connected to the turbine). Therefore, estimating exhaust gases’ enthalpy is crucial in this model.
Due to the engine configuration, the gas enthalpy at the exhaust valve differs from the enthalpy at the turbine inlet. Exhaust gases exchange heat with the exhaust manifold, which, in turn, transfers heat to the engine coolant.
The heat transfer between the exhaust gases and the exhaust manifold walls is modeled as
The exhaust gases’ temperature is determined within the model using three lookup tables: a base map in function of engine speed and load, a correction factor map considering lambda and MFB50, and another correction factor map depending on . Like the trapped mass, these tables are derived from the outputs of the calibrated 1D model.
Considering the influence of filling and emptying dynamics on exhaust gas temperature, a transfer function slows down the temperature decrease in cut-off conditions, and a delay, proportional to fuel injection increase, models engine filling upon startup.
Friction losses generated by the rotating and sliding motions of the engine components contribute to heat generation. The total heat released by engine friction can be computed using the well-known Chen–Flynn friction model [
20].
where
is the mean piston speed expressed in
rps:Friction losses are divided between the engine coolant and engine oil. The contribution from the rotating parts is directly transferred to the lubricating oil, while the friction due to the piston sliding against the cylinder is split between the two fluids.
After computing the heat transfer from in-cylinder gases to the cylinder walls, considering the losses through the cylinder walls is essential to estimate heat rejected to the coolant. As the cylinder operates predominantly in transient conditions during a racing lap, the cylinder walls’ temperature never stabilizes, and part of the heat is continuously dissipated by the walls. Assuming a homogeneous cylinder walls’ temperature [
21], these losses are computed as
In static conditions, the heat flux from in-cylinder gases and friction heats the cylinder walls until reaching an equilibrium temperature. Once this temperature is attained, the heat entering the walls equals the flux from the walls to the coolant, and no further heat is dissipated by the cylinder walls. In such conditions, the evaluation of heat dissipated by the cylinder walls can be omitted from the model, reducing computational time and effort.
Heat losses through the piston can be computed under the same assumptions made for the cylinder walls:
Considering that coolant frictions are solely due to the piston sliding contribution internal to the cylinder, they are transferred to the coolant through the cylinder walls. Similarly, the piston sliding contribution to friction is transferred through the piston, contributing to piston heat losses.
The heat transfer from the piston to the oil is modeled as a purely convective flux, assuming homogeneous oil temperature equal to the oil temperature measured at the engine inlet:
The oil, entering the engine, carries heat away from the crankshaft components, the piston bottom, the liner, and the camshaft, and flows out. Therefore, the friction contribution is added to the convective heat transfer.
Due to the engine’s compactness, advanced materials, and extreme working conditions in an F1 engine, continuous heat exchange with the coolant and engine oil occurs, leading to variable temperatures in the cylinder block. If this model is applied to static working conditions or to series cars, where the engine block temperature can be considered constant during most operations except for warm-up, the heat exchange between the coolant, engine block, and oil can be neglected.
To account for the total heat transferred to the engine oil, it is necessary to divide the oil heat exchanges into two phases: first, the oil absorbs heat from the piston, and then it flows through the engine transferring heat to the engine block.
The oil temperature rate of change due to the first heat exchange can be evaluated as
The hypothesis is that simultaneously, 2/3 of the total oil mass exchanges heat with the piston, while the remaining mass transfers heat to the engine block.
is defined as
The total oil mass can be computed from the oil mass flow rate (obtained from empirical data) in function of the inlet oil temperature:
In the computation of the total oil mass, assuming a homogeneous oil temperature is acknowledged, recognizing the inaccuracy of this hypothesis. Equating the oil temperature to the engine inlet one, instead of an intermediate or outlet temperature, is chosen for safety reasons: lower oil temperature increases heat rejected to the fluid, necessitating higher power dissipation.
After the first exchange, the oil is heated to an intermediate temperature
the highest and most critical engine fluid temperature. Subsequently, the oil releases heat to the engine block during the second exchange:
is positive if the flux is from the engine block to the oil:
Similar to the walls and piston, the engine block dissipates part of the heat before transferring it to the coolant:
Before considering all the contributions entering the engine coolant, a final heat dissipation is considered:
This accounts for the contribution of exhaust gases’ enthalpy used to heat up the exhaust system.
The heat transferred from the exhaust system to the coolant is calculated as follows:
Even though the exhaust system is not directly in contact with the engine coolant, losses through the material in the between are included in Equation (23).
To consider heat exchange from the oil to the coolant through the engine block as a unified flow, the flux is positive when the engine block is heated up by the coolant:
Once all the heat fluxes to the engine coolant have been computed, the rate of variation of the coolant temperature at the engine outlet is [
21]
As for the oil, the hypothesis is that the engine coolant maintains a constant temperature equal to the one measured at the engine inlet. The coolant is assumed to exchange heat with the engine block, cylinder walls, and exhaust system simultaneously. This assumption is made for computational simplicity, considering the complexity of dynamic temperature changes throughout the coolant system.
Since not the entire coolant volume is concurrently involved in the heat exchanges, a factor of 4/5 is applied to the coolant mass to account for this reality.
Also in this case, the total coolant mass is defined in function of the coolant temperature at the engine inlet:
In the final stages of developing the model, certain parameters such as heat exchange areas, heat transfer coefficients, solid wall masses, mass flow rates, and specific heat coefficients are yet to be determined. Due to confidentiality reasons, specific values and materials used cannot be disclosed. However, the process of assigning these values will be outlined.
The oil and coolant mass flow rates are dependent on the engine rotational speed, since the pumps are driven by the engine motion. Empirical dependencies are detected through testing at the bench, and these relationships are then converted into maps for integration into the model.
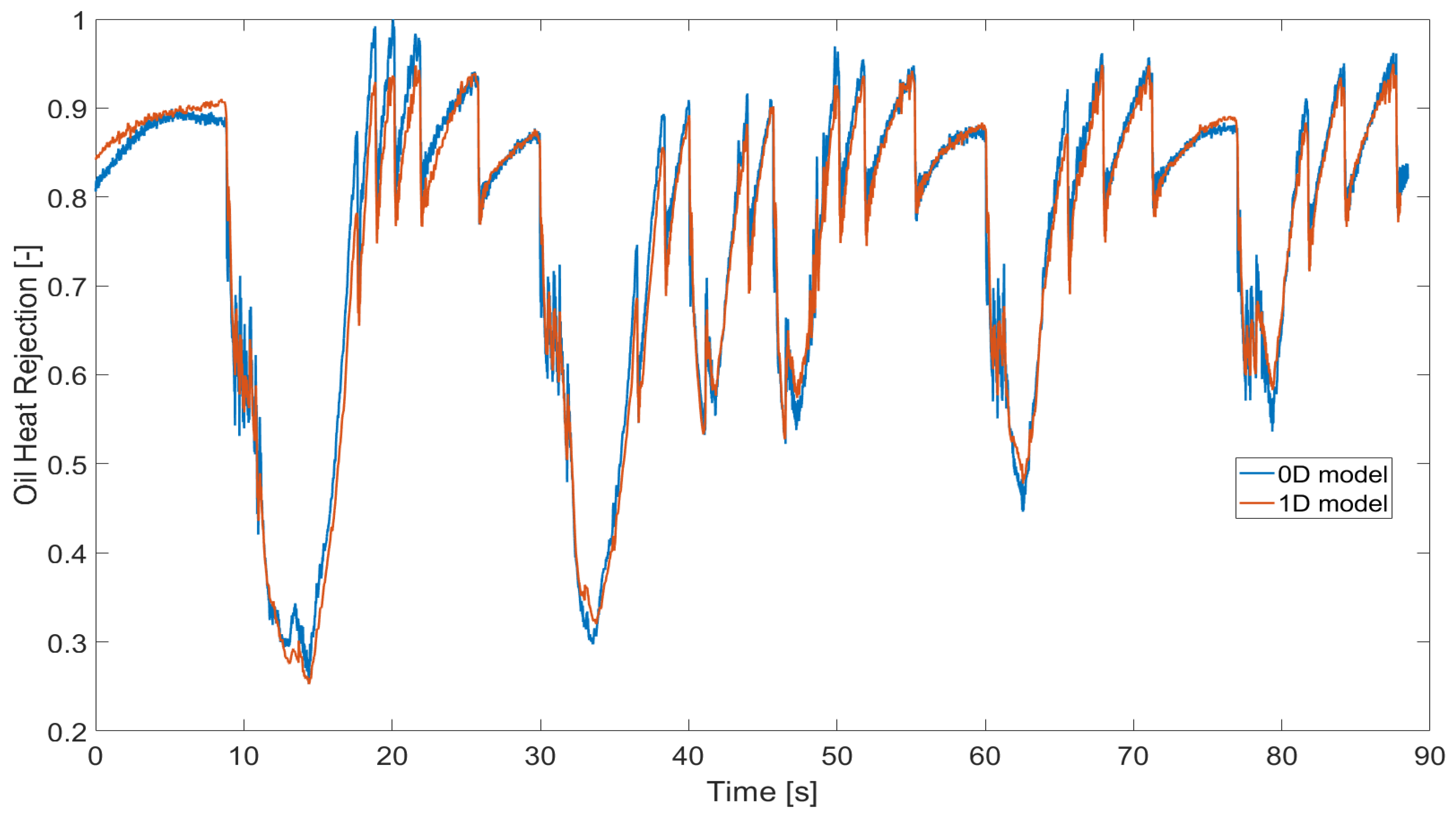
To specify the other parameters, an iterative process is employed. The model is run with a set of input data, and the outputs are compared to those obtained from another simulator run with the same input data. The values assigned to the model parameters are those resulting in the minimum difference between the heat rejection values simulated by the model and those computed by the 1D simulation.
The initial approximations for the areas of the convective fluxes are straightforward:
is the cross-section area of the piston head normal to the cylinder axis.
represents the cylinder surface in contact with the gases, including the head and the liner.
is the external surface of the liner.
includes the bottom surface of the piston, including the piston bosses and the pins.
is the external surface of the water jacket.
and are left unknown.
During the iterative process, the values for parameters are adjusted to achieve the correct behavior of the model with each set of testing data. These adjustments may involve reducing or increasing values based on the observed performance of the model.
Simultaneously, heat transfer coefficients are defined, with initial approximations derived from literature values based on the materials used in the engine, the mechanical process they undergo, and the working conditions. Following a series of tests and literature reviews [
22,
23,
24], maps are created for all heat transfer coefficients in the model. Among these coefficients,
is the only constant coefficient, while the others exhibit different behaviors. Specifically,
,
and
are linear functions of the engine load, and
,
and
are non-linear functions of the engine rotational speed. Finally,
is a linear function of the engine speed.
This approach makes the model less complex than Woschni’s model [
25], as each thermal coefficient is a function of a single variable, resulting in better computational efficiency.
The total engine oil and coolant masses are computed from their density values, while other missing masses are assumed to be equal to the piston mass , the combined mass of the liner and head , and the remaining engine block mass .
The specific heat values are determined from literature values [
22,
23,
24], considering the materials of which they are made. The specific heats of solid materials are kept constant, while those of coolant and oil are modeled functions of their temperatures.
As previously mentioned, the model calculates the peak cylinder temperature, which needs to be converted into the time-averaged temperature [
26]. To achieve this, a coefficient in the model is assigned through iterations.
After the initial approximation is assigned to every parameter, each estimation is relaxed, and a range of values is designated for each variable. A comprehensive exploration of all possible combinations is conducted by running a matrix of multiple levels. The optimization process is executed using a MATLAB R2022b script containing a sequence of nested “for” cycles, with one cycle for each variable. The first attempt involves a relatively large range of values for each variable, and subsequently, the ranges are progressively reduced in each run. This iterative approach refines the model parameters to minimize the difference between simulated heat rejection values and those computed by the 1D simulation.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}