
Impact of Short-Circuit Ratio on Control Parameter Settings of DFIG Wind Turbines




Abstract
1. Introduction
- A detailed description of the state-space model, which captures the influence of the PLL on GSC and RSC voltages (see Table 1);
- A study of the influence of the SCR on the critical values (stability boundary) of the control parameters, which make the DFIG unstable for different DFIG power values;
- The validation of the instability predictions of the state-space model by hundreds of PSCAD simulations, providing excellent results;
- A study of the approximation of the DC capacitor by an ideal voltage source to show that the approximations in the literature can lead to incorrect predictions.
2. DFIG Model
2.1. Induction Machine Model
2.2. AC Grid and Stator Relations
2.3. AC–DC Converter Relations
2.4. Stator and Rotor CC Loop Connections
2.5. Outer Control Loop Relations
2.6. PLL Rotor and Stator Relations
3. State-Space Model
4. Eigenvalue Analysis of DFIG
5. SCR Influence on DFIG Stability
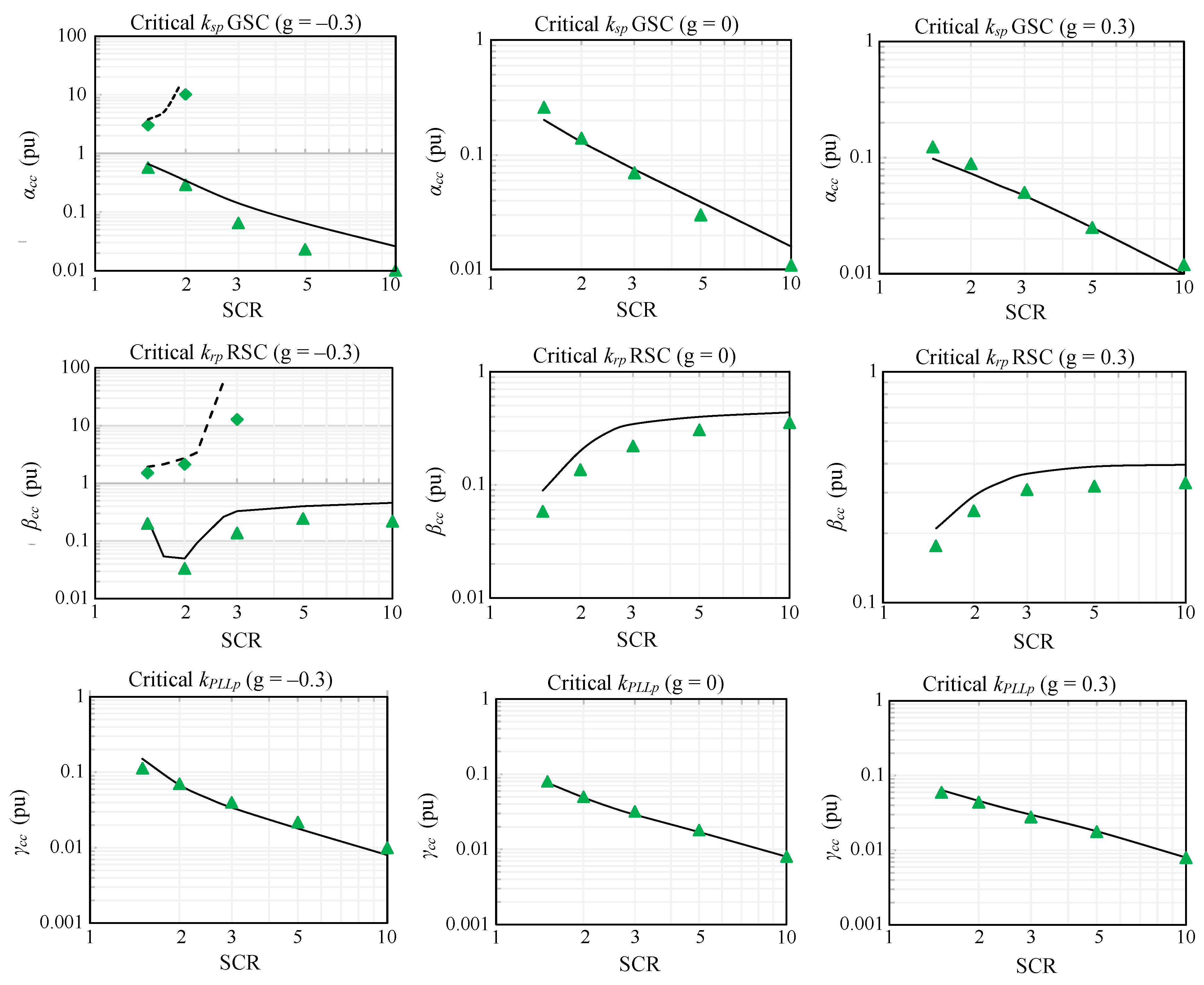
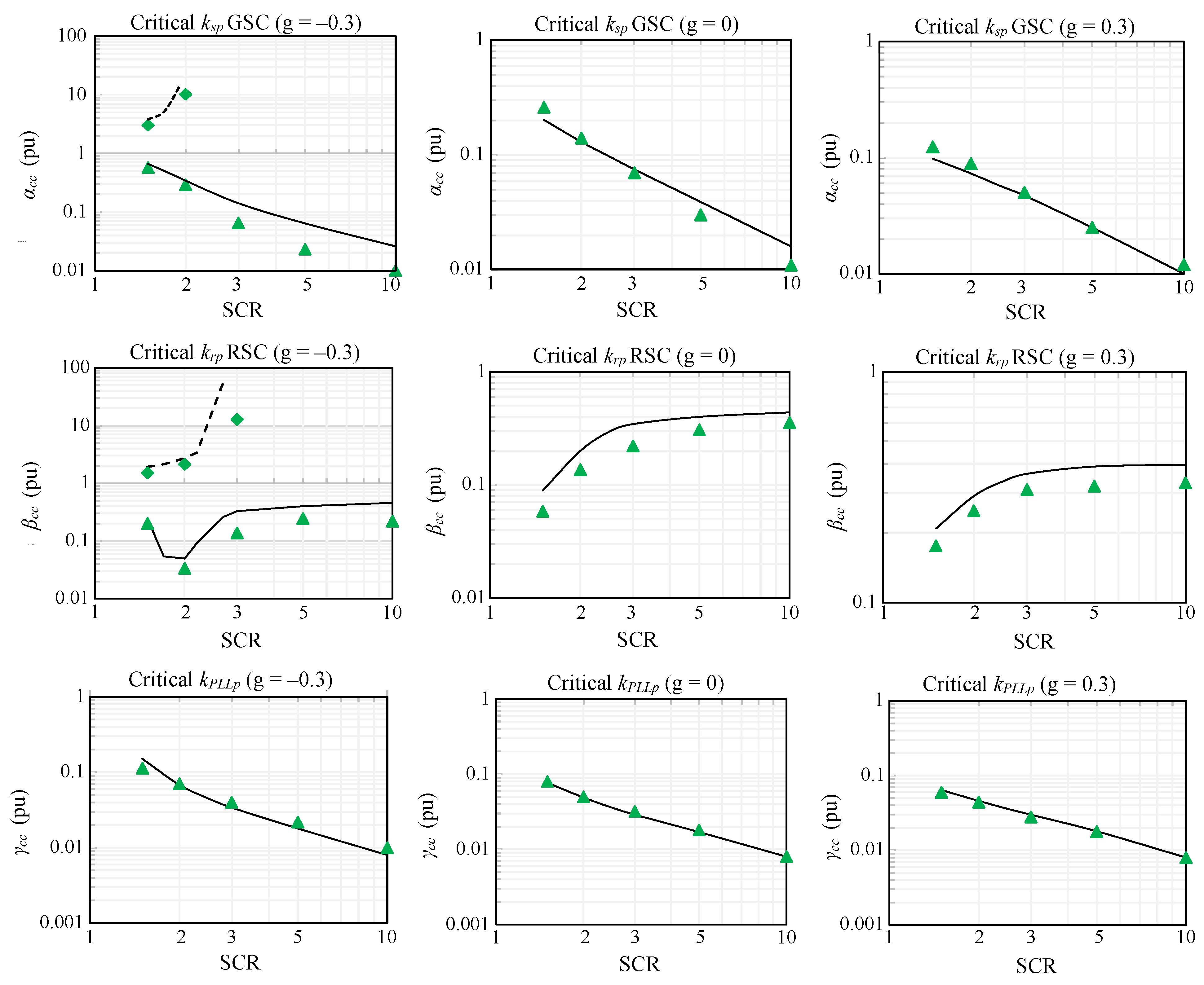
5.1. SCR Influence on the Extremum Critical Values of the Proportional Gains
5.1.1. Case #1
- Only the maximum critical values of the GSC proportional gain exist, which causes DFIG instability for very low SCR values and the slip value g = −0.3 (i.e., high DFIG power generation). For other conditions and other GSC and RSC proportional gains, no maximum critical value causes instability. The studied values of αcc and βcc are less than 1000.
- The lower the SCR, the higher the minimum values for critical GSC and PLL proportional gains.
- The lower the SCR, the lower the minimum value for critical RSC proportional gain. Hence, the highest minimum critical value is obtained with an infinite SCR and only depends on the slip (i.e., it has no dependence on the grid impedance).
- The most critical values of the RSC proportional gain occur when the DFIG is fed by strong grids (i.e., by grids with SCR = ∞). These values are βcc (pu) = 0.634, 0.523, and 0.415 for g = −0.3, 0, and 0.3, respectively.
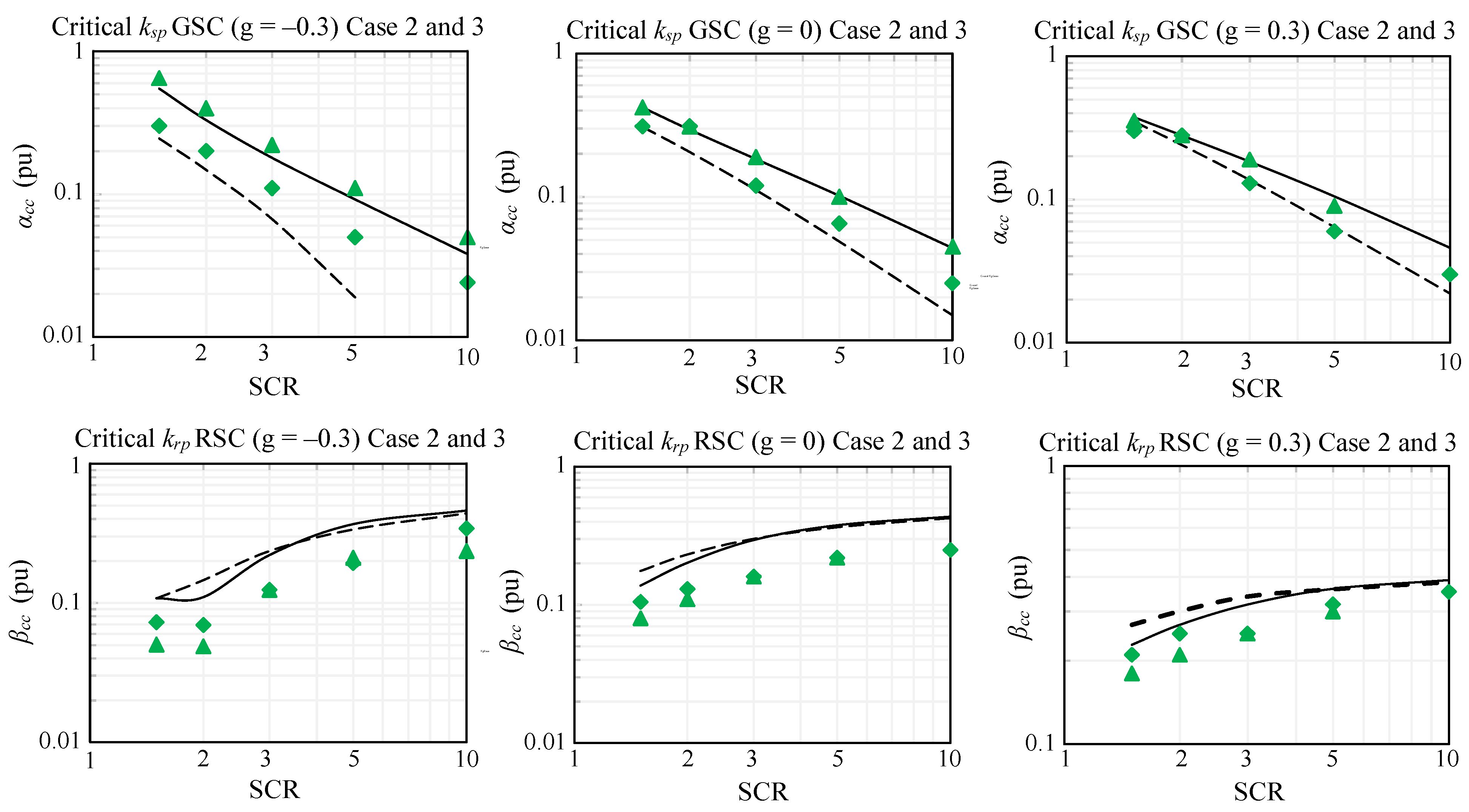
5.1.2. Cases #2 and #3
- There are no maximum critical values of the kp that cause DFIG instability.
- As in Case #1, the lower the SCR, the higher the minimum values for critical GSC and PLL proportional gains.
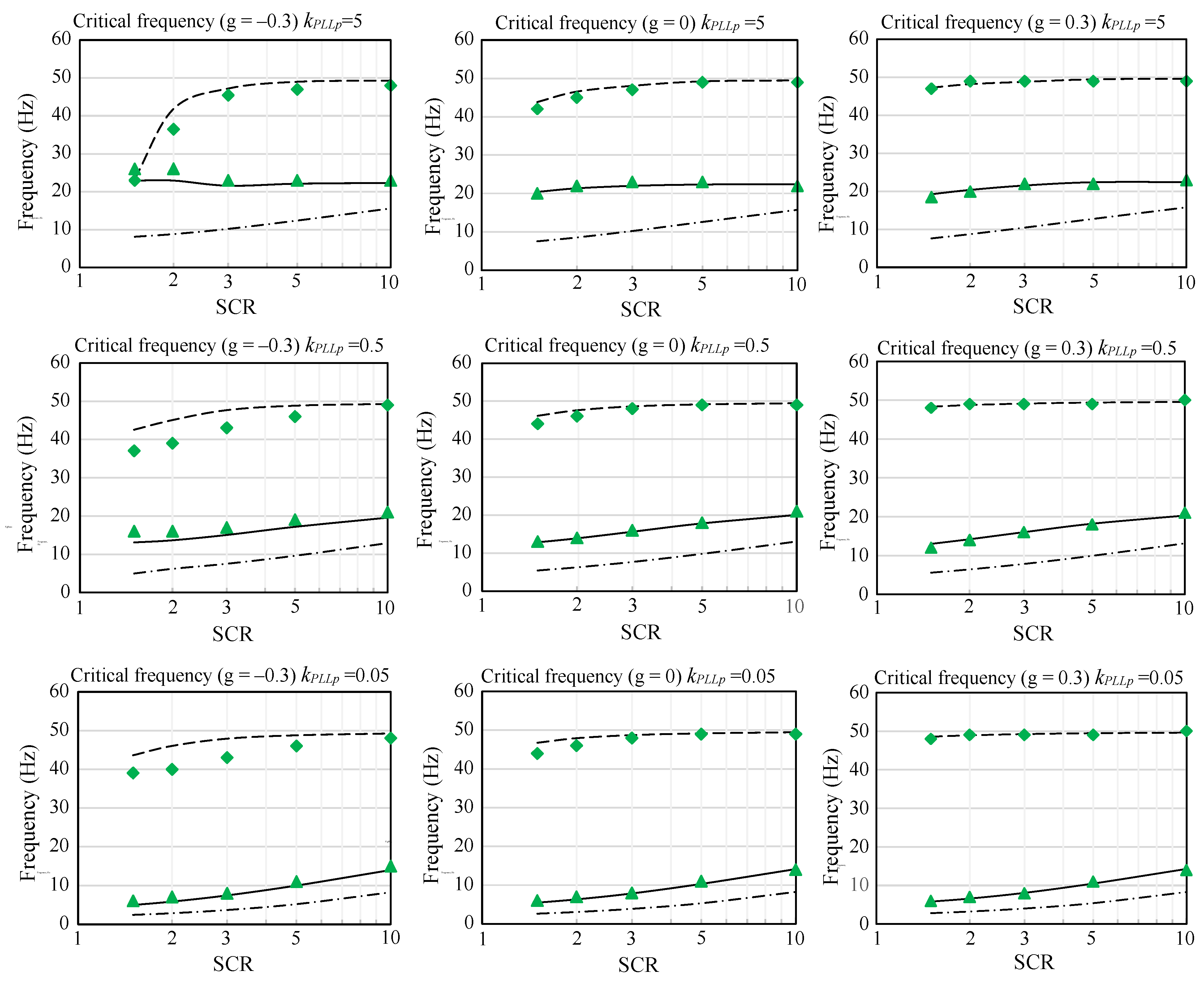
5.2. SCR Influence on Instability Frequency
- The instability frequency due to the critical proportional gain of the RSC is close to 50 Hz and depends slightly on the SCR value.
- The instability frequency due to the critical proportional gain of the GSC ranges from 5 to 25 Hz and is significantly affected by the SCR and the DFIG slip or the power conditions.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shair, J.; Xie, X.; Liu, W.; Li, X.; Li, H. Modeling and stability analysis methods for investigating subsynchronous control interaction in large-scale wind power systems. Renew. Sustain. Energy Rev. 2021, 135, 110420. [Google Scholar] [CrossRef]
- Cheng, Y.; Fan, L.; Rose, J.; Huang, S.-H.; Schmall, J.; Wang, X.; Xie, X.; Shair, J.; Ramamurthy, J.R.; Modi, N.; et al. Real-World Subsynchronous Oscillation Events in Power Grids with High Penetrations of Inverter-Based Resources. IEEE Trans. Power Syst. 2023, 38, 316–330. [Google Scholar] [CrossRef]
- Fan, L.; Miao, Z.; Shah, S.; Cheng, Y.; Rose, J.; Huang, S.-H.; Pal, B.; Xie, X.; Modi, N.; Wang, S.; et al. Real-World 20-Hz IBR Subsynchronous Oscillations: Signatures and Mechanism Analysis. IEEE Trans. Energy Convers. 2022, 37, 2863–2873. [Google Scholar] [CrossRef]
- Miao, Z. Impedance-Model-Based SSR Analysis for Type 3 Wind Generator and Series-Compensated Network. IEEE Trans. Energy Convers. 2012, 27, 984–991. [Google Scholar] [CrossRef]
- Song, Y.; Blaabjerg, F. Analysis of middle-frequency resonance in DFIG system considering phase-locked loop. IEEE Trans. Power Electron. 2018, 33, 343–356. [Google Scholar] [CrossRef]
- Ju, P.; Sun, B.; Shahidehpour, M.; Pan, X. Impedance Modeling and Analysis for DFIG-Based Wind Farm in SSO Studies. IEEE Access 2020, 8, 158380–158390. [Google Scholar] [CrossRef]
- Fan, L.; Kavasseri, R.; Miao, Z.L.; Zhu, C. Modeling of DFIG-Based Wind Farms for SSR Analysis. IEEE Trans. Power Deliv. 2010, 25, 2073–2082. [Google Scholar] [CrossRef]
- Fan, L.; Zhu, C.; Miao, Z.; Hu, M. Modal Analysis of a DFIG-Based Wind Farm Interfaced with a Series Compensated Network. IEEE Trans. Energy Convers. 2011, 26, 1010–1020. [Google Scholar] [CrossRef]
- Mishra, Y.; Mishra, S.; Li, F.; Dong, Z.Y.; Bansal, R.C. Small-Signal Stability Analysis of a DFIG-Based Wind Power System Under Different Modes of Operation. IEEE Trans. Energy Convers. 2009, 24, 972–982. [Google Scholar] [CrossRef]
- Tang, Y.; Ju, P.; He, H.; Qin, C.; Wu, F. Optimized Control of DFIG-Based Wind Generation Using Sensitivity Analysis and Particle Swarm Optimization. IEEE Trans. Smart Grid 2013, 4, 509–520. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Z.; Østergaard, J.; Dong, Z.Y.; Wong, K.P.; Ma, X. Oscillatory Stability and Eigenvalue Sensitivity Analysis of A DFIG Wind Turbine System. IEEE Trans. Energy Convers. 2011, 26, 328–339. [Google Scholar] [CrossRef]
- Hu, J.; Huang, Y.; Wang, D.; Yuan, H.; Yuan, X. Modeling of Grid-Connected DFIG-Based Wind Turbines for DC-Link Voltage Stability Analysis. IEEE Trans. Sustain. Energy 2015, 6, 1325–1336. [Google Scholar] [CrossRef]
- Liu, R.; Yao, J.; Wang, X.; Sun, P.; Pei, J.; Hu, J. Dynamic Stability Analysis and Improved LVRT Schemes of DFIG-Based Wind Turbines During a Symmetrical Fault in a Weak Grid. IEEE Trans. Power Electron. 2020, 35, 303–318. [Google Scholar] [CrossRef]
- Huang, P.-H.; El Moursi, M.S.; Xiao, W.; Kirtley, J.L. Subsynchronous Resonance Mitigation for Series-Compensated DFIG-Based Wind Farm by Using Two-Degree-of-Freedom Control Strategy. IEEE Trans. Power Syst. 2015, 30, 1442–1454. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Santi, E. Modeling and Control of Gate-Controlled Series Capacitor Interfaced With a DFIG-Based Wind Farm. IEEE Trans. Ind. Electron. 2015, 62, 1022–1033. [Google Scholar] [CrossRef]
- Ali, M.T.; Zhou, D.; Song, Y.; Ghandhari, M.; Harnefors, L.; Blaabjerg, F. Analysis and Mitigation of SSCI in DFIG Systems with Experimental Validation. IEEE Trans. Energy Convers. 2020, 35, 714–723. [Google Scholar] [CrossRef]
- Ostadi, A.; Yazdani, A.; Varma, R.K. Modeling and Stability Analysis of a DFIG-Based Wind-Power Generator Interfaced with a Series-Compensated Line. IEEE Trans. Power Deliv. 2009, 24, 1504–1514. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Santi, E. SSR Damping Controller Design and Optimal Placement in Rotor-Side and Grid-Side Converters of Series-Compensated DFIG-Based Wind Farm. IEEE Trans. Sustain. Energy 2015, 6, 388–399. [Google Scholar] [CrossRef]
- Jia, Y.; Huang, T.; Li, Y.; Ma, R. Parameter Setting Strategy for the Controller of the DFIG Wind Turbine Considering the Small-Signal Stability of Power Grids. IEEE Access 2020, 8, 31287–31294. [Google Scholar] [CrossRef]
- Sun, B.; Ju, P.; Shahidehpour, M.; Pan, X. Calculation of Stable Domain of DFIG-Based Wind Farm in Series Compensated Power Systems. IEEE Access 2020, 8, 34900–34908. [Google Scholar] [CrossRef]
- Kong, L.; Xue, Y.; Qiao, L.; Wang, F. Review of Small-Signal Converter-Driven Stability Issues in Power Systems. IEEE Open Access J. Power Energy 2022, 9, 29–41. [Google Scholar] [CrossRef]
- Zhou, J.Z.; Ding, H.; Fan, S.; Zhang, Y.; Gole, A.M. Impact of Short-Circuit Ratio and Phase-Locked-Loop Parameters on the Small-Signal Behavior of a VSC-HVDC Converter. IEEE Trans. Power Deliv. 2014, 29, 2287–2296. [Google Scholar] [CrossRef]
- Pedra, J.; Sainz, L.; Monjo, L. Three-port small-signal admittance-based model of VSC for studies of multi-terminal HVDC hybrid AC/DC transmission grids. IEEE Trans. Power Syst. 2021, 36, 732–743. [Google Scholar] [CrossRef]
- Pedra, J.; Sainz, L.; Monjo, L. Comparison of small-signal admittance-based models of doubly-fed induction generators. Int. J. Electr. Power Energy Syst. 2023, 145, 108654. [Google Scholar] [CrossRef]
- Lesenne, J.; Notelet, F.; Seguier, G. Introduction a l’Electrotechnique Approfondie; Technique&Documentation: Paris, France, 1981. [Google Scholar]
- Kojooyan-Jafari, H.; Monjo, L.; Córcoles, F.; Pedra, J. Parameter Estimation of Wound-Rotor Induction Motors from Transient Measurements. IEEE Trans. Energy Convers. 2014, 29, 300–308. [Google Scholar] [CrossRef]
- Harnefors, L.; Bongiorno, M.; Lundberg, S. Input-Admittance Calculation and Shaping for Controlled Voltage-Source Converters. IEEE Trans. Ind. Electron. 2007, 54, 3323–3334. [Google Scholar] [CrossRef]
- Xu, Y.; Nian, H.; Wang, T.; Chen, L.; Zheng, T. Frequency coupling characteristic modeling and stability analysis of doubly fed induction generator. IEEE Trans. Energy Convers. 2018, 33, 1475–1486. [Google Scholar] [CrossRef]
- Medina, J.F.; Feijoo, A.E. Calculating steady-state operating conditions for double-fed induction generator wind turbines. IEEE Trans Power Syst. 2010, 25, 922–928. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Model Features | [7] | [8] | [9] | [10] | [11] | [12] | [13] | [14] | [15] | [16] | [17] | [18] | [19] | [20] |
| PLL included |  | | | | |  | | | | | | | | |
| Weak grid (W) or Series-Compensated line (C) | C | C | W | W | W | W | W | C | C | C | C | C | W | C |
| Non-approximate model of generator | | | | | | | | | | | | | | |
| Non-approximate control model | | | | | | | | | | | | | | |
| Mechanical model included | | | | | | | | | | | | | | |
| Inductive node eliminated | | | | | | | | | | | | | | |
| Correct dependence of vs. and vr of θPLL | | | | | | | | | | | | | | |
| Number of state equations | 22 | 20 | 15 | 16 | 13 | 6 | 12 | 22 | 22 | 22 | 29 | 22 | 15 | 16 |
| VsN | 690 V | PN | 1.5 MW | VCdc | 1.15 kV |
| f1 | 50 Hz | Rs | 2.4 mΩ | Rr | 2 mΩ |
| Lsd | 60 µH | Lrd | 83 µH | M | 2.95 mH |
| Rc | 0.0 | Lc | 0.1 mH | CDC | 20 mF |
| ksp | 0.15 Ω | krp | 0.6 Ω | kPLLp | 5 1/(V·s) |
| ksi | 2 Ω/s | kri | 54.45 Ω/s | kPLLi | 50 1/V |
| kDCp | 2 1/Ω | kDCi | 20 1/(Ω·s) | CN | 0.1 μF |
| Slip, g | P (MW) | ird (A) | irq (A) | isd (A) | mrd (pu) | mrq (pu) | msd (pu) | msq (pu) |
|---|---|---|---|---|---|---|---|---|
| −0.3 | 1.5 | −1712 | 749 | −496 | −0.1893 | −0.0352 | 0.5796 | −0.0468 |
| 0 | 0.68 | −1015 | 747 | 4.6 | 0.0018 | −0.0013 | 0.5796 | −0.0277 |
| 0.3 | 0.234 | −498 | 746 | 149 | 0.192 | 0.0086 | 0.5796 | −0.0136 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pedra, J.; Sainz, L.; Monjo, L. Impact of Short-Circuit Ratio on Control Parameter Settings of DFIG Wind Turbines. Energies 2024, 17, 1825. https://doi.org/10.3390/en17081825
Pedra J, Sainz L, Monjo L. Impact of Short-Circuit Ratio on Control Parameter Settings of DFIG Wind Turbines. Energies. 2024; 17(8):1825. https://doi.org/10.3390/en17081825
Chicago/Turabian StylePedra, Joaquín, Luis Sainz, and Lluís Monjo. 2024. "Impact of Short-Circuit Ratio on Control Parameter Settings of DFIG Wind Turbines" Energies 17, no. 8: 1825. https://doi.org/10.3390/en17081825
APA StylePedra, J., Sainz, L., & Monjo, L. (2024). Impact of Short-Circuit Ratio on Control Parameter Settings of DFIG Wind Turbines. Energies, 17(8), 1825. https://doi.org/10.3390/en17081825