
Study on Nonlinear Dynamic Characteristics of RV Reducer Transmission System

Abstract
1. Introduction
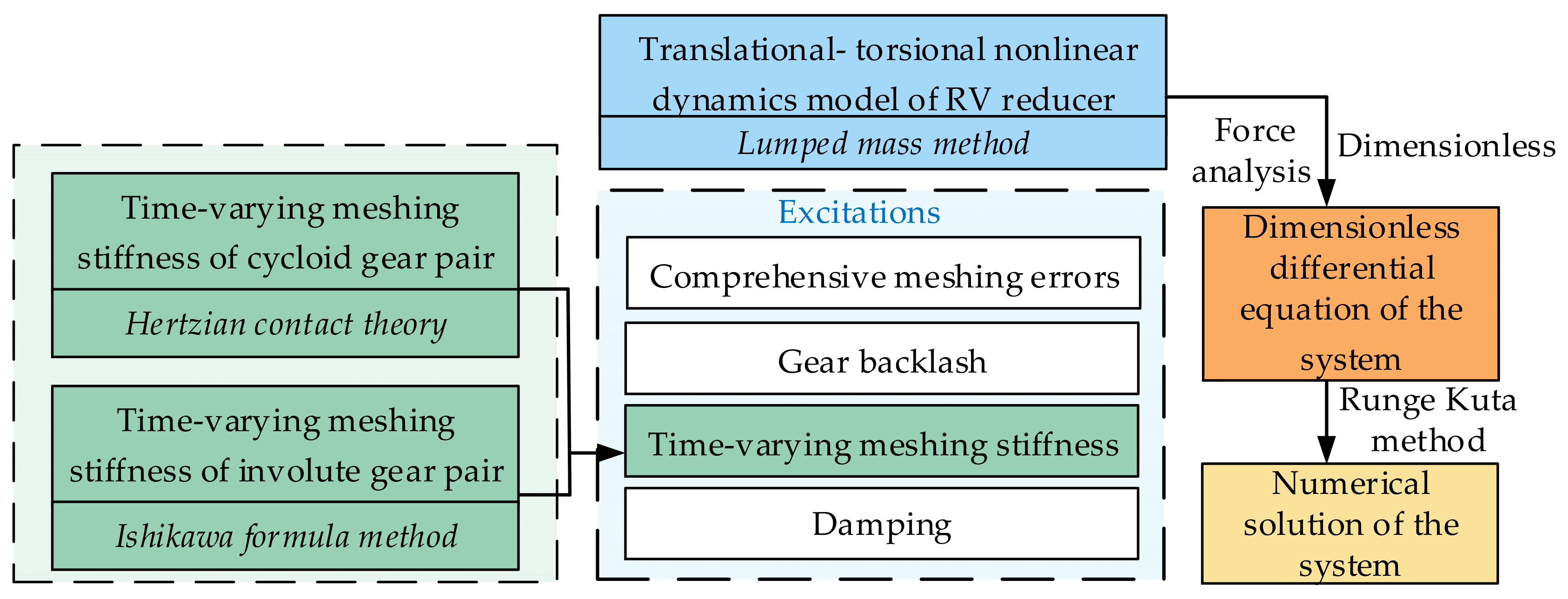
2. Translational–Torsional Nonlinear Dynamics Modeling of the RV Reducer
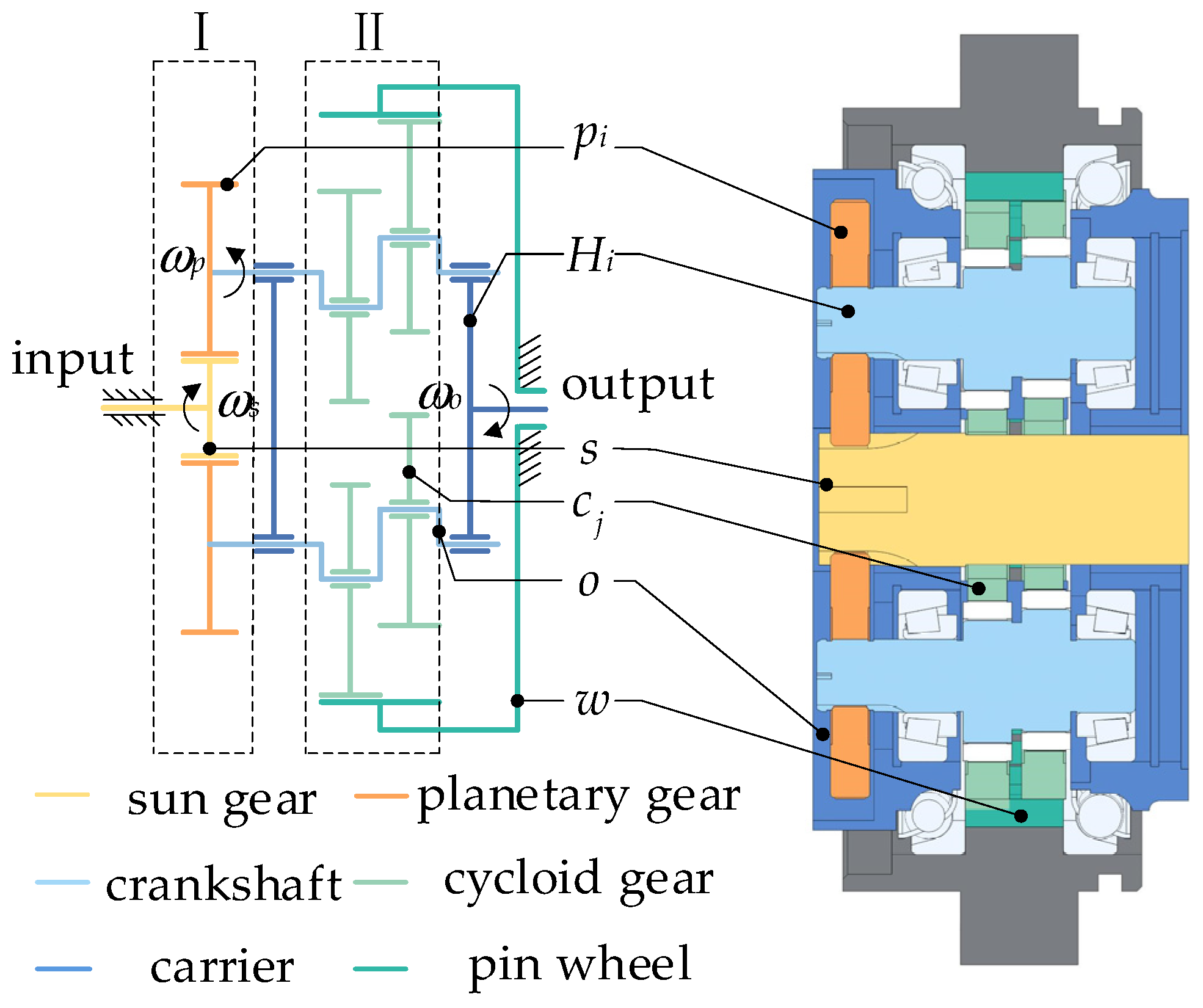
2.1. Structure and Transmission Principle of RV the Reducer
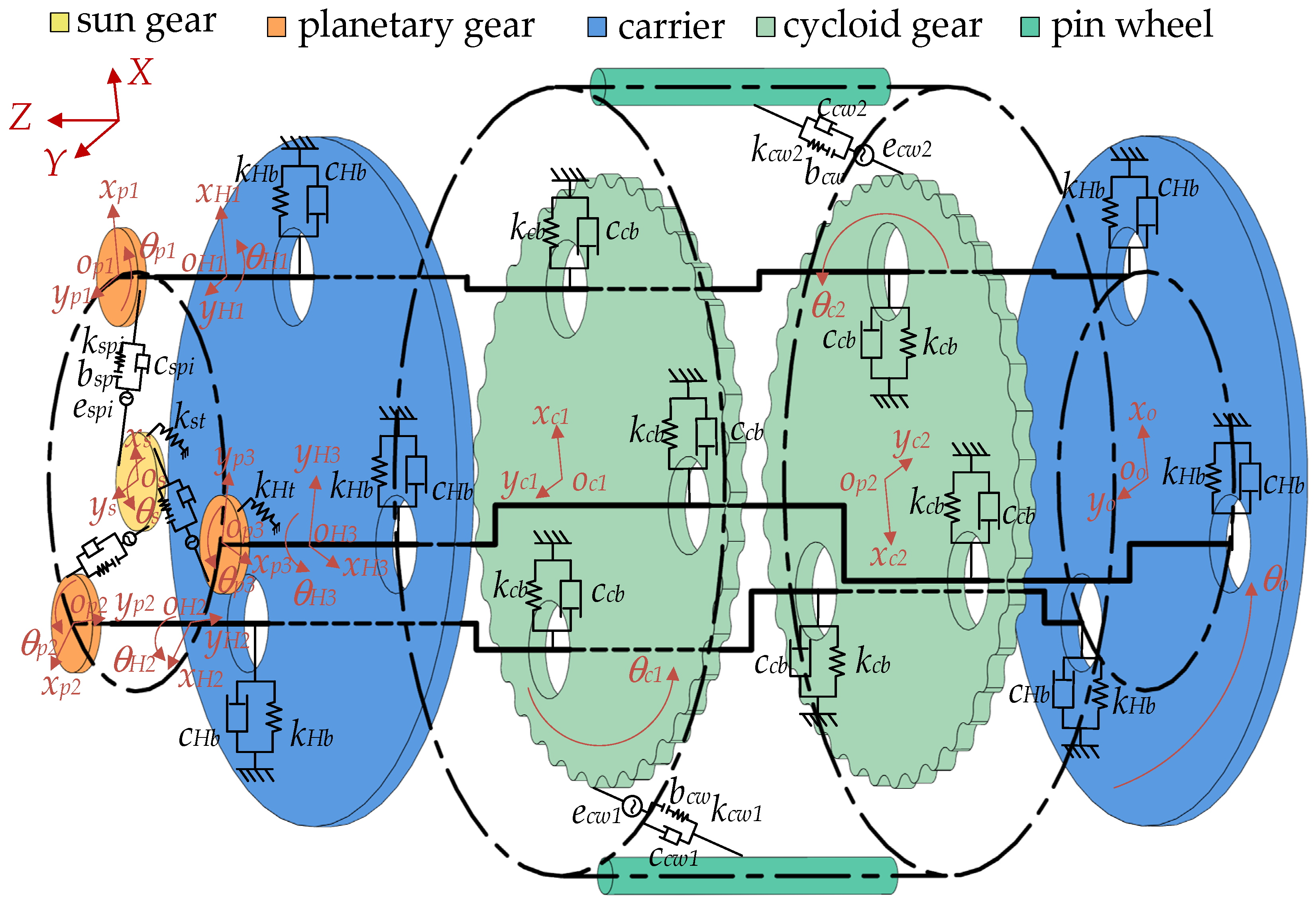
2.2. The Lumped Parameter Model of RV Reducer
2.3. Time-Varying Meshing Stiffness of Gears
2.3.1. Time-Varying Meshing Stiffness of Involute Gear Pair
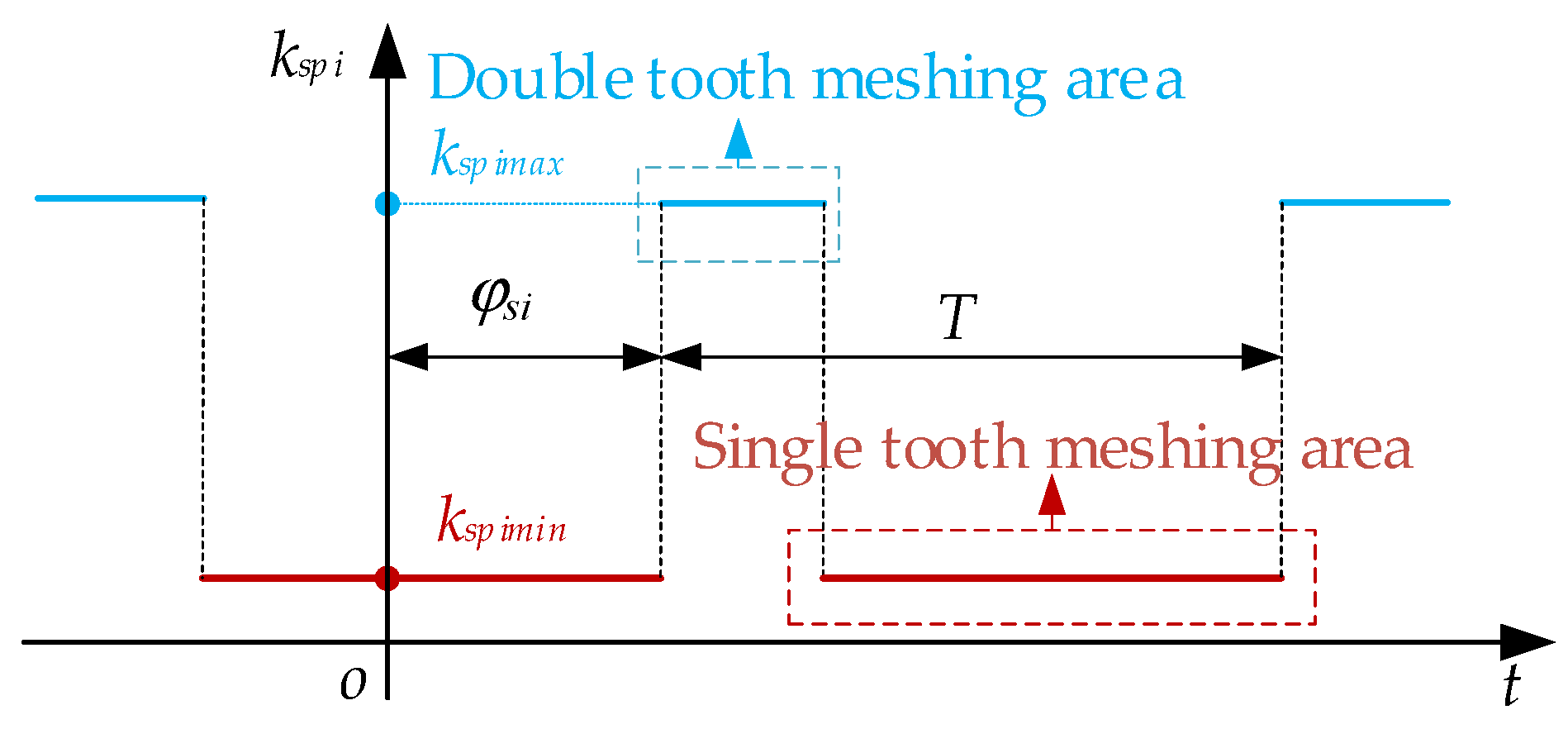
2.3.2. Time-Varying Meshing Stiffness of Cycloid Gear Pair
2.4. Relative Motion and Force Analysis between Movable Components in the RV Reducer Transmission System
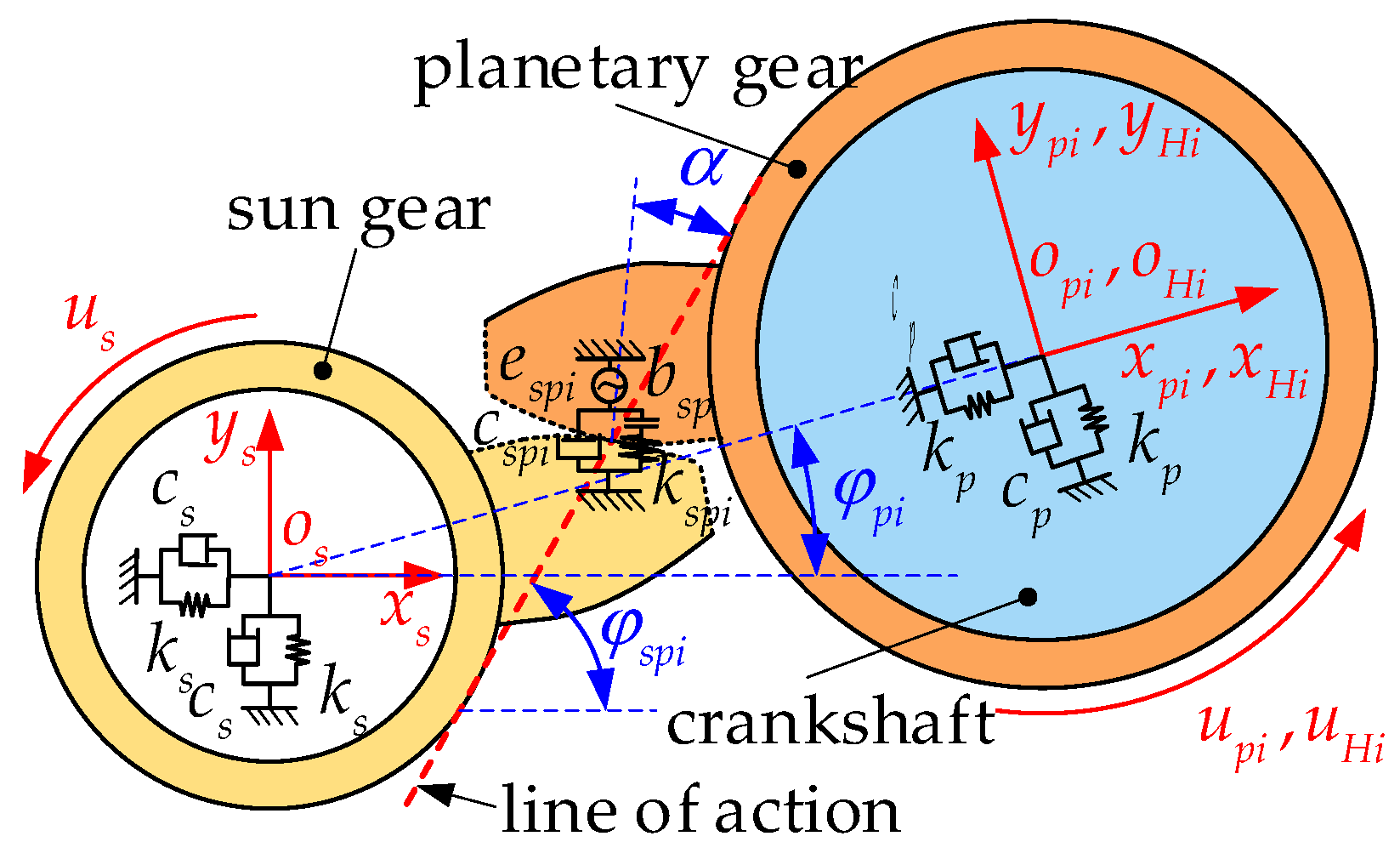
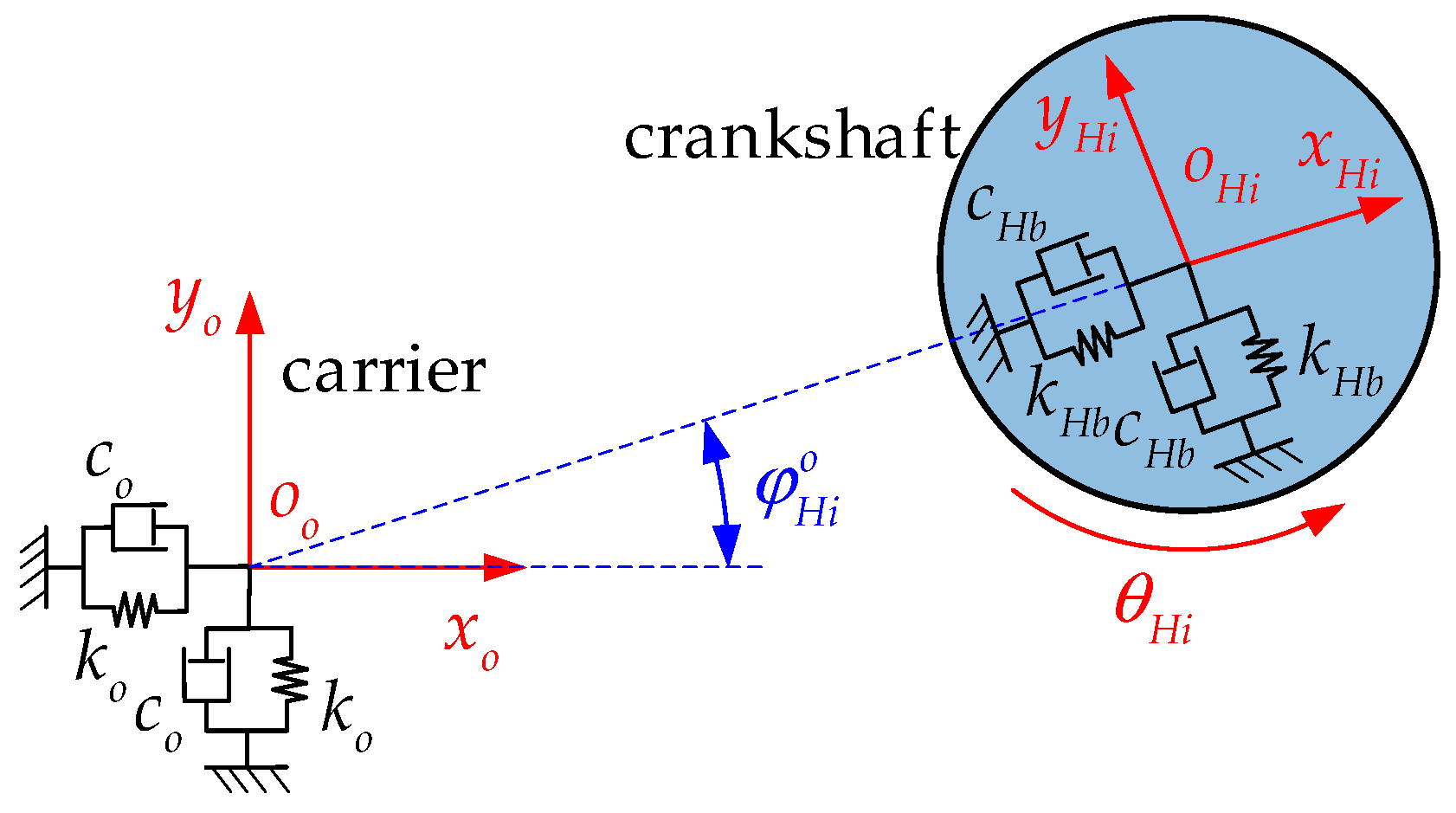
2.4.1. Relative Motion Relationship and Force Analysis in Planetary Gear System
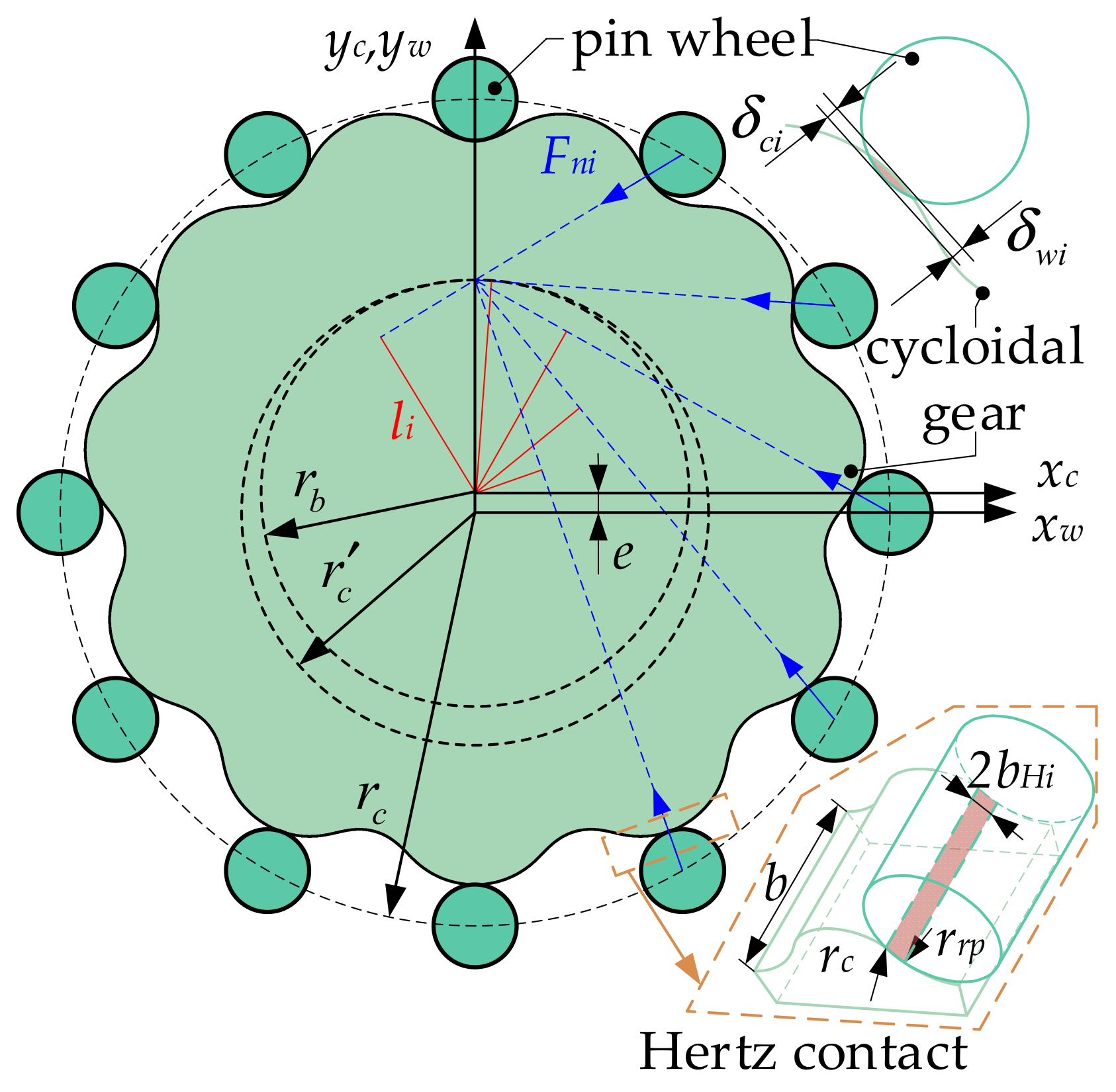
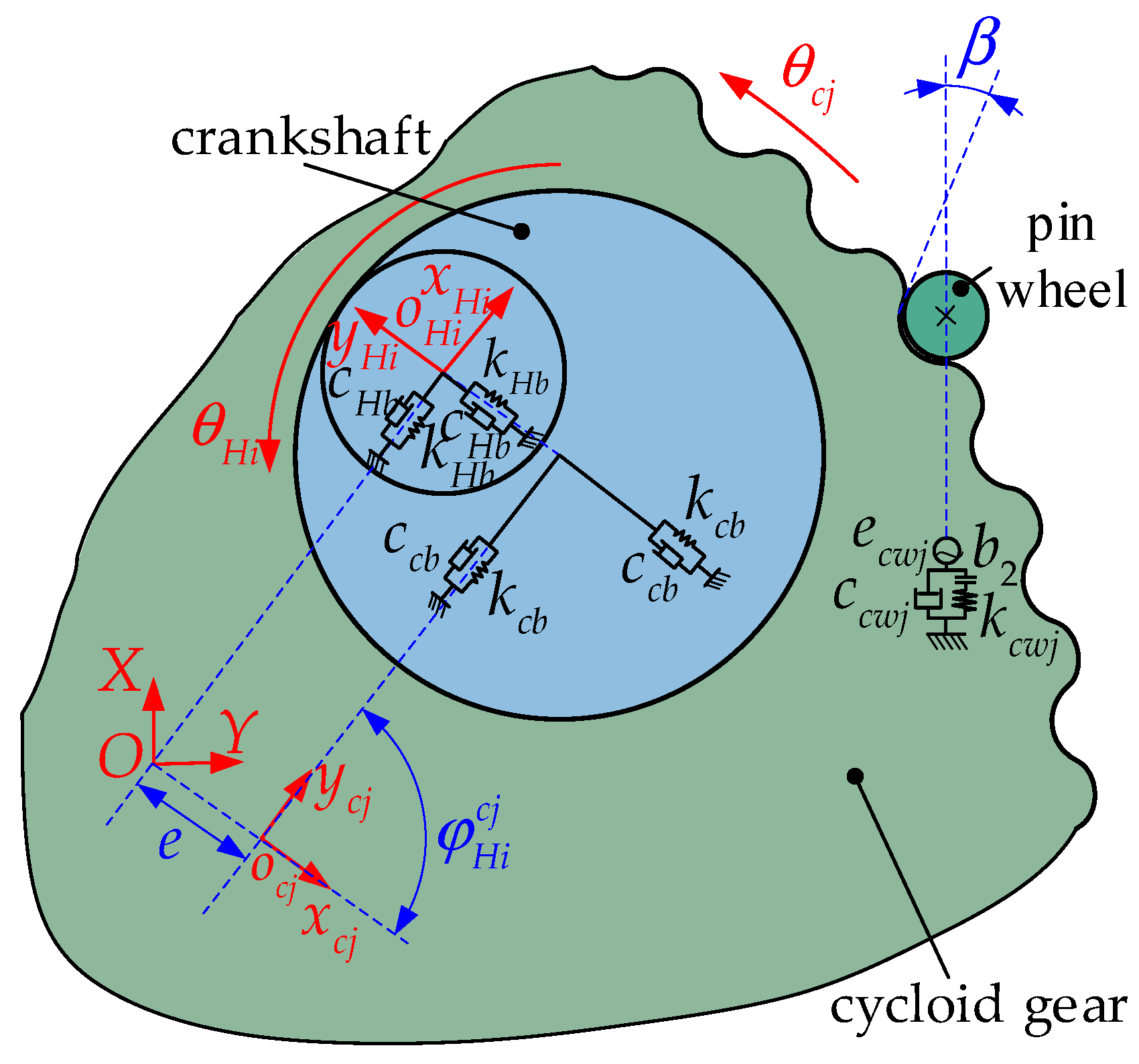
2.4.2. Relative Motion Relationship and Force Analysis in Cycloidal Pinwheel System
2.4.3. Relative Motion Relationship and Force Analysis at the Output Stage
2.5. System of Dimensionless Differential Equations
3. Nonlinear Dynamic Analysis of RV Reducer
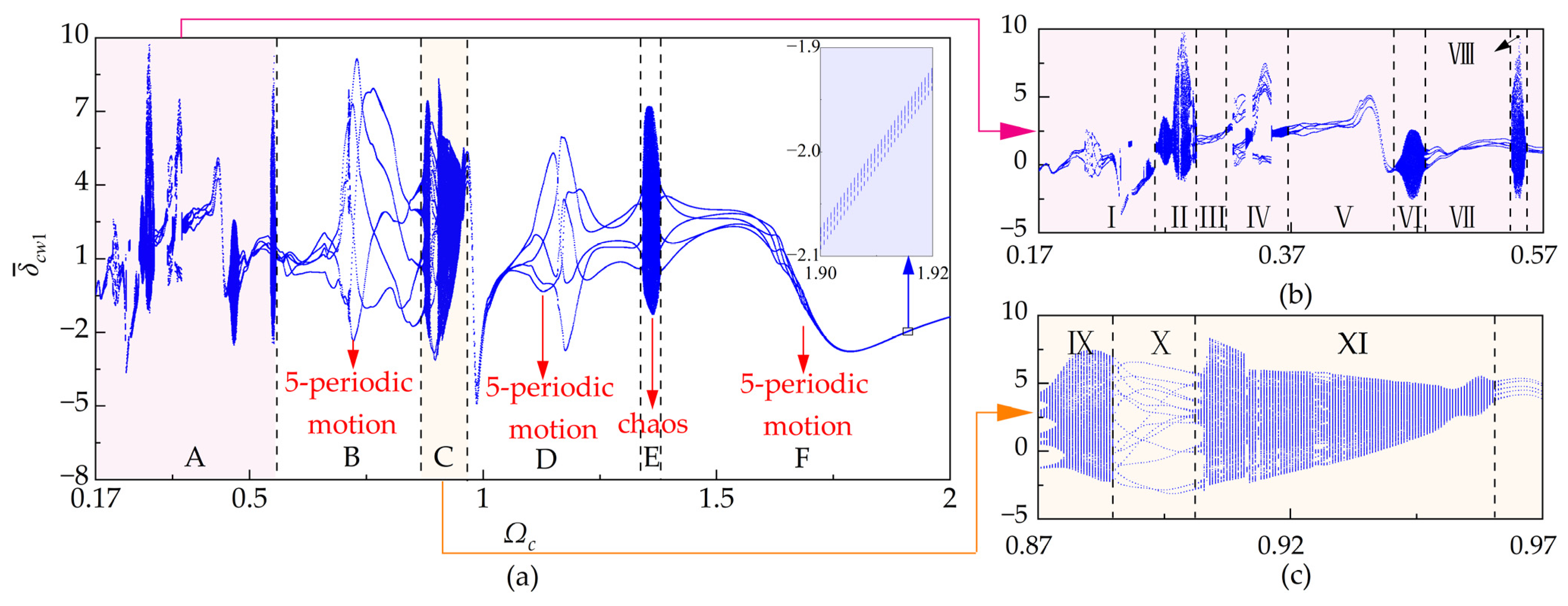
3.1. Dynamic Response of the System with the Variation of Excitation Frequency
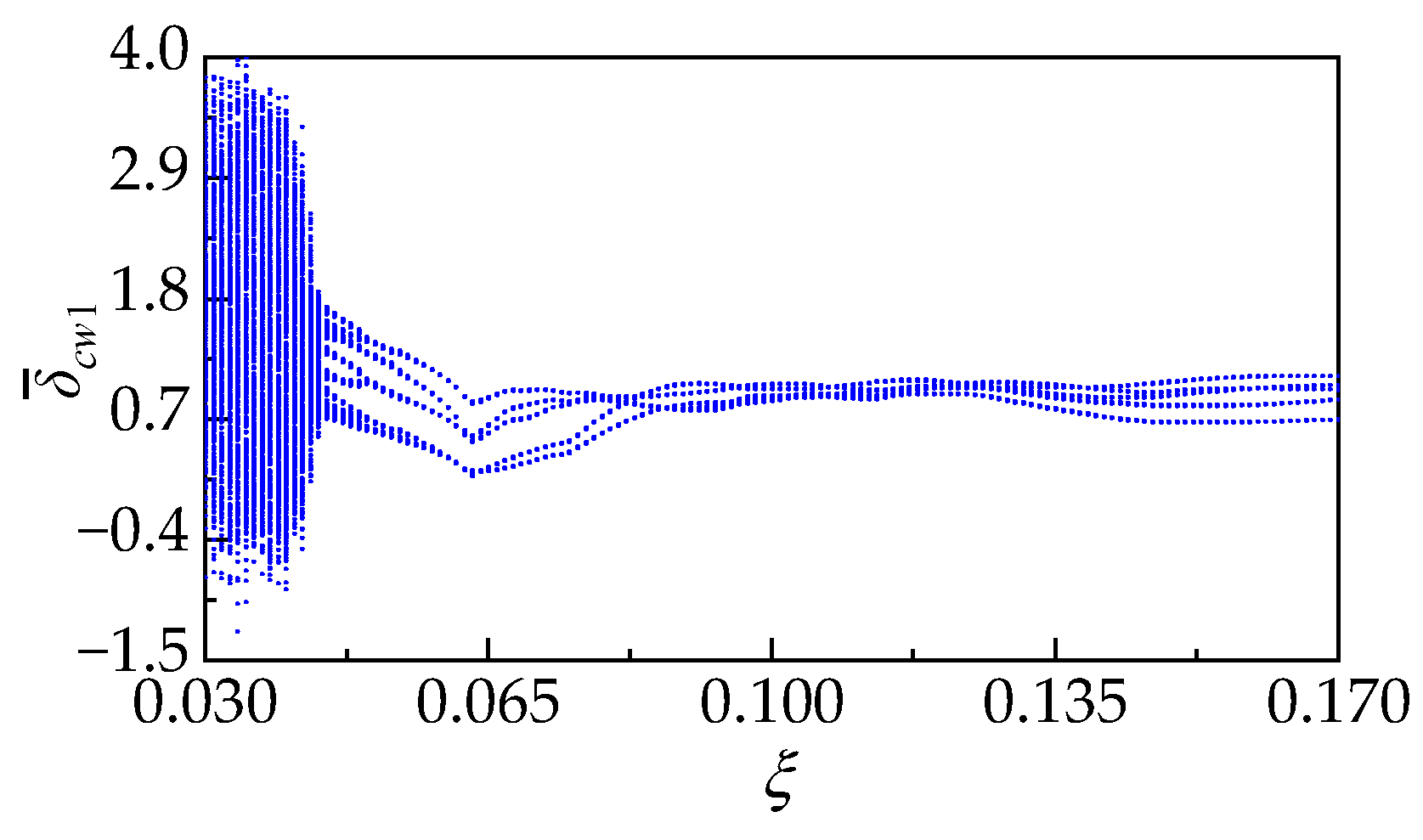
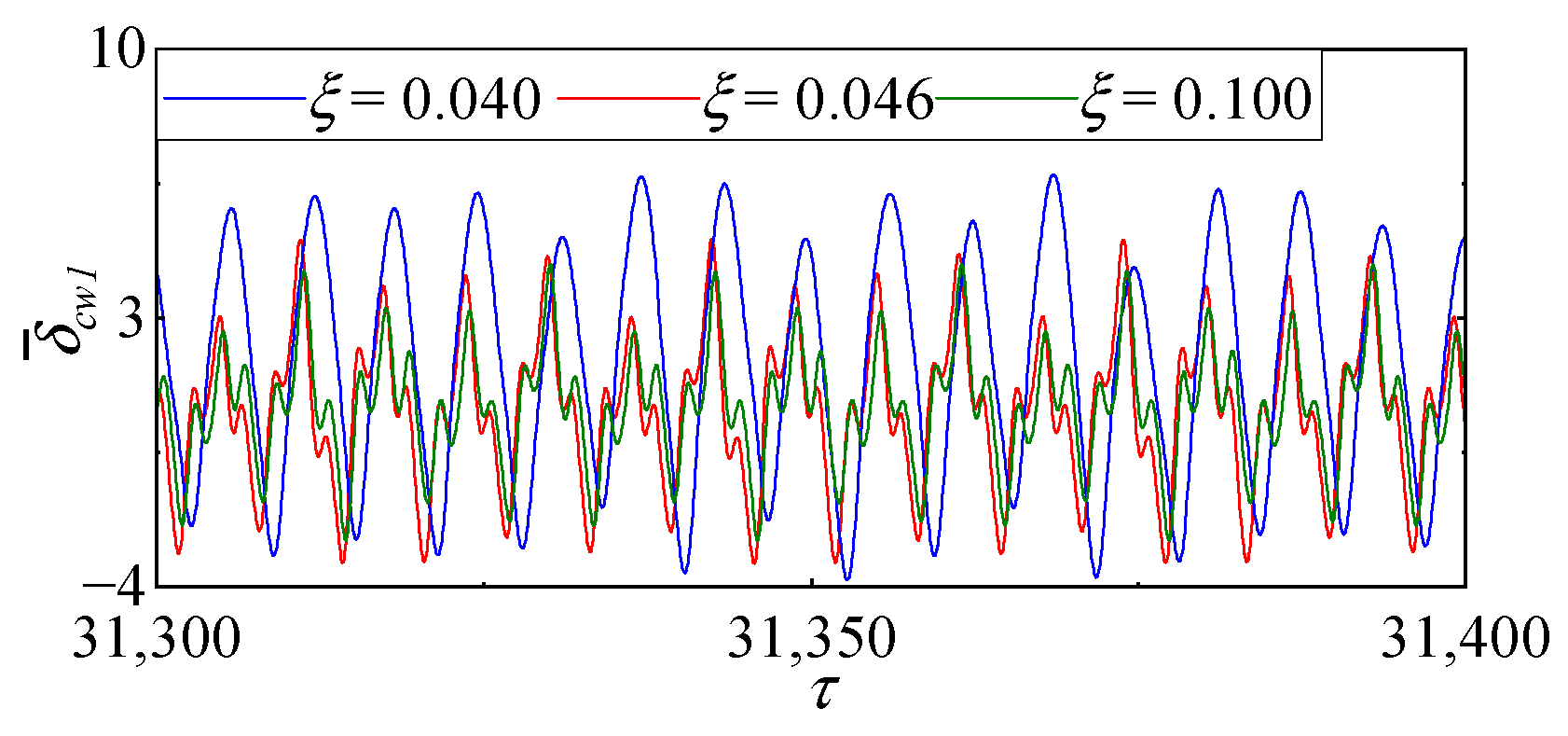
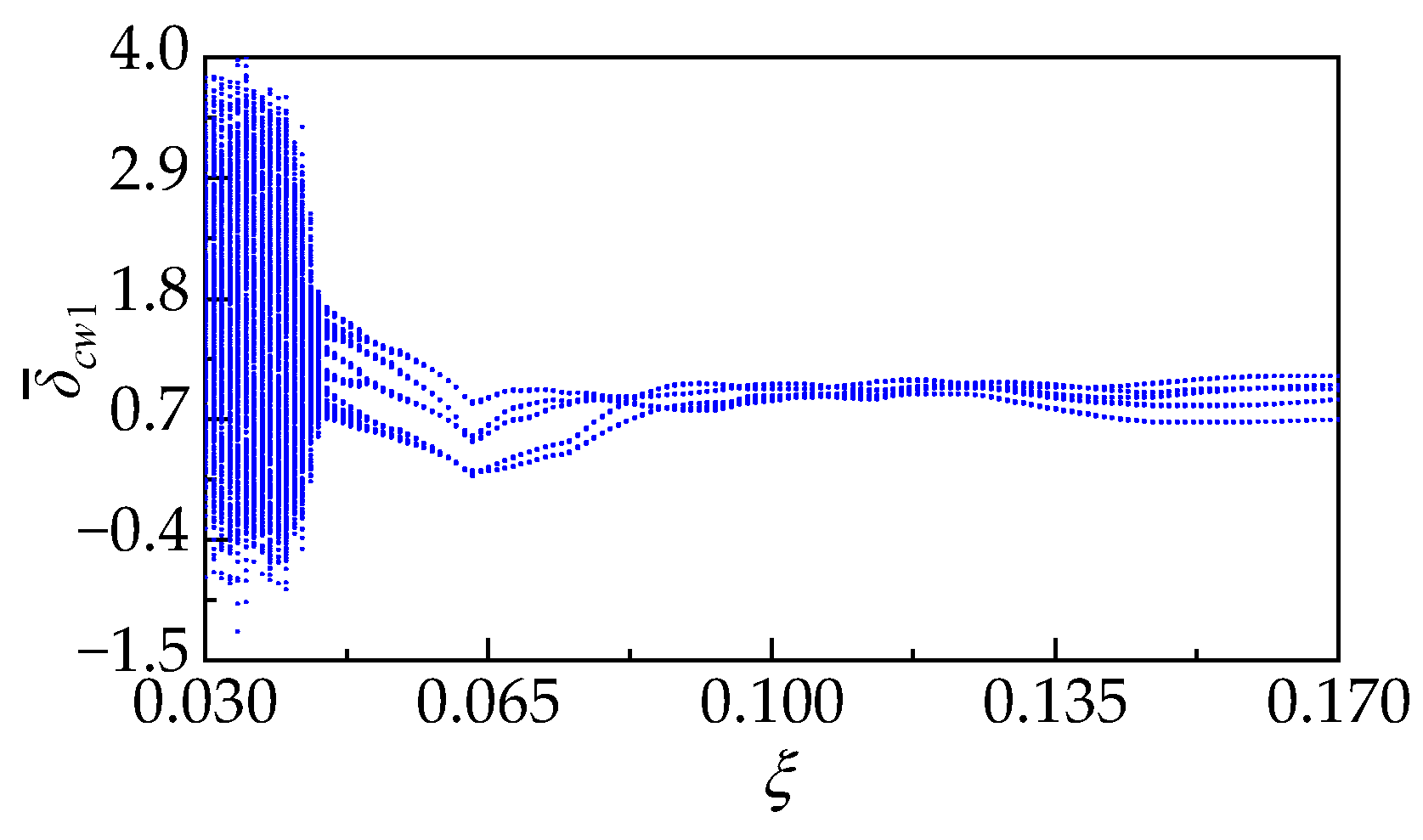
3.2. Dynamic Response of the System with Variation of Mesh Damping
4. Conclusions
- (1)
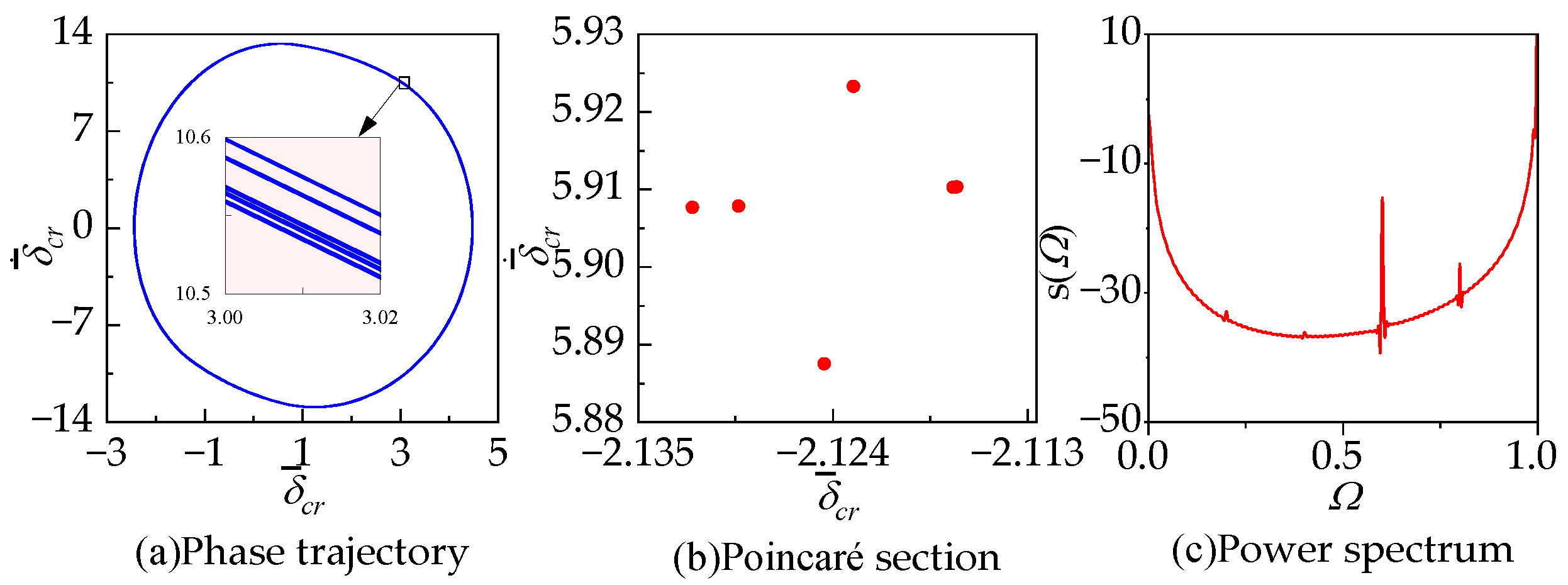
- Considering gear backlash, time-varying mesh stiffness, and comprehensive meshing errors, a translational–torsional dynamic model of the RV reducer transmission system was established. The dimensionless vibration differential equations of the system were derived and solved numerically. The results provided by calculating bifurcation diagrams, phase portraits, Poincaré sections, and the power spectrum are illustrated clearly in order to analyze the motion states and chaotic regions of this system, and to investigate the effects of the excitation frequency and meshing damping coefficient;
- (2)
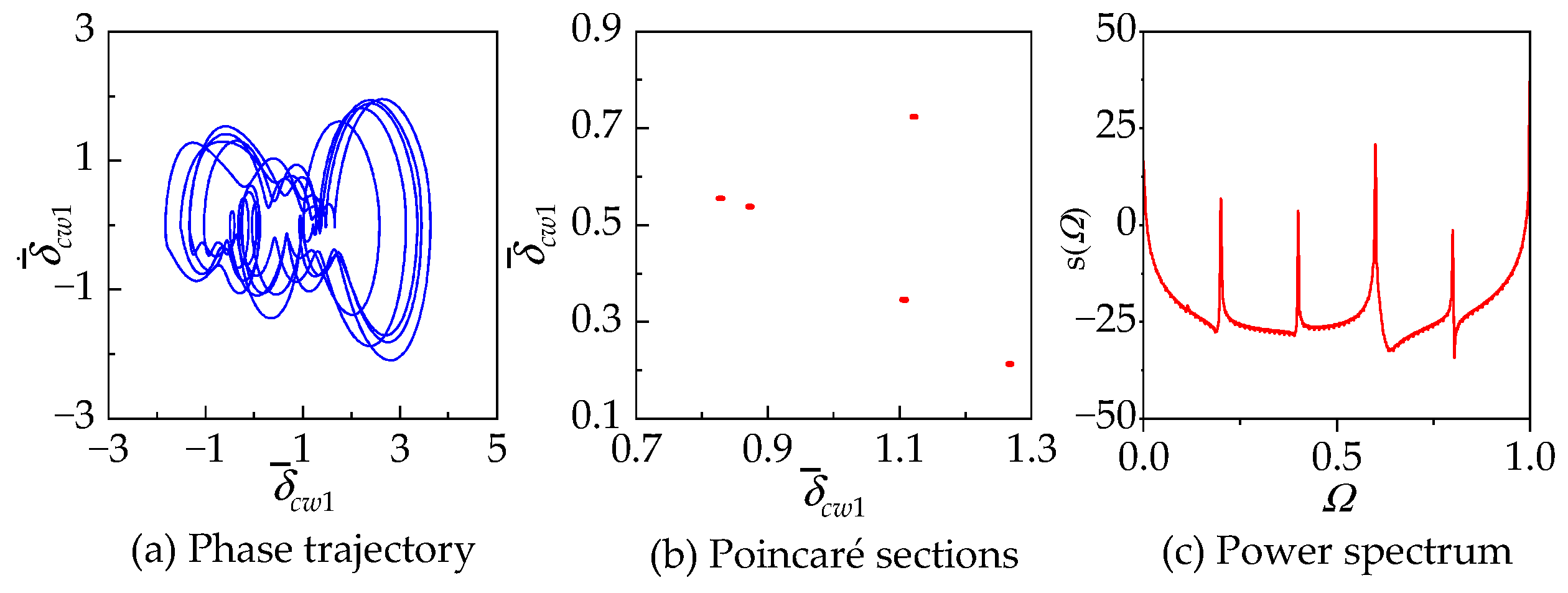
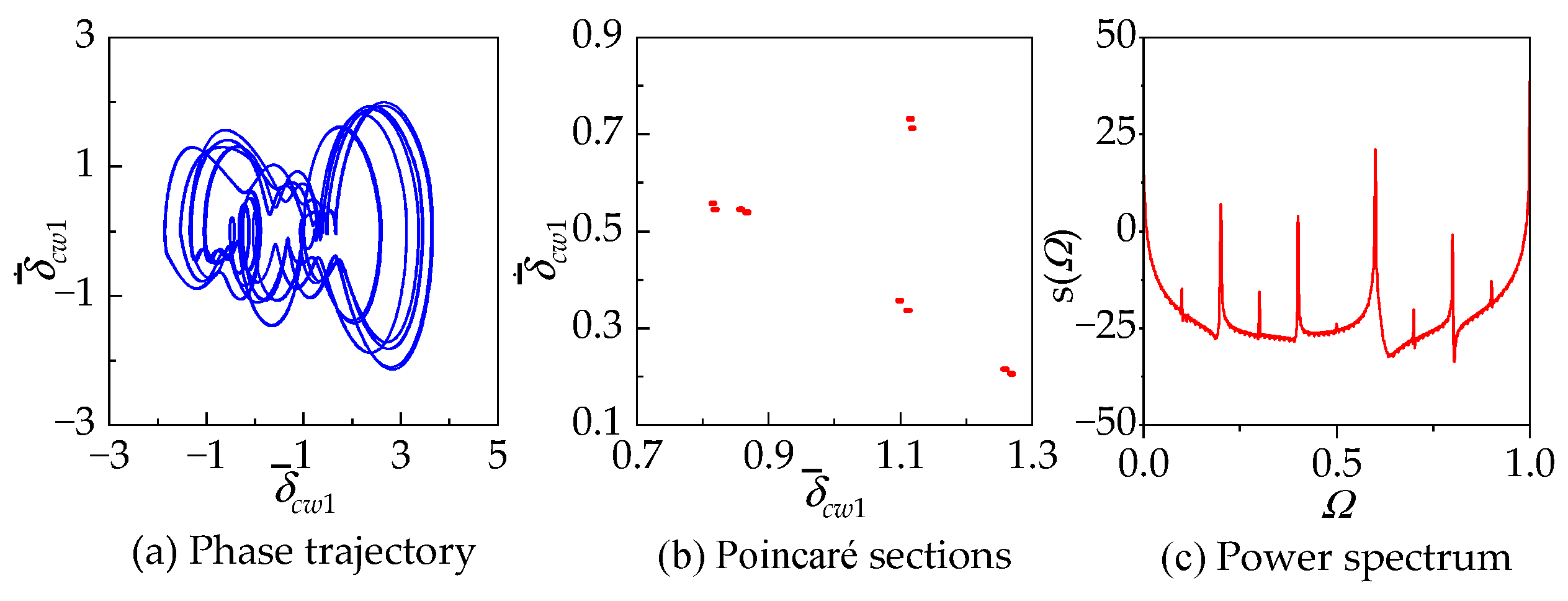
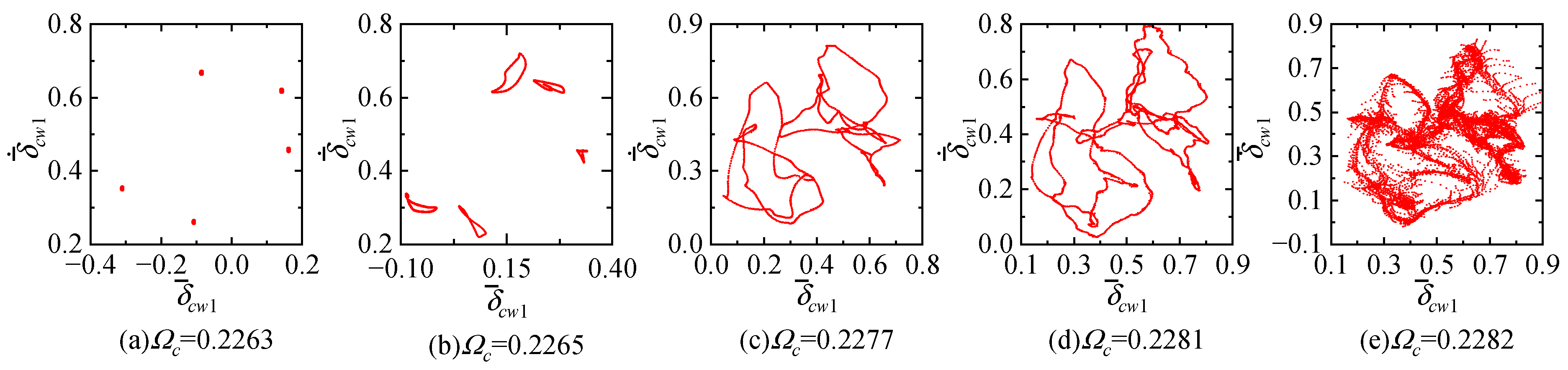
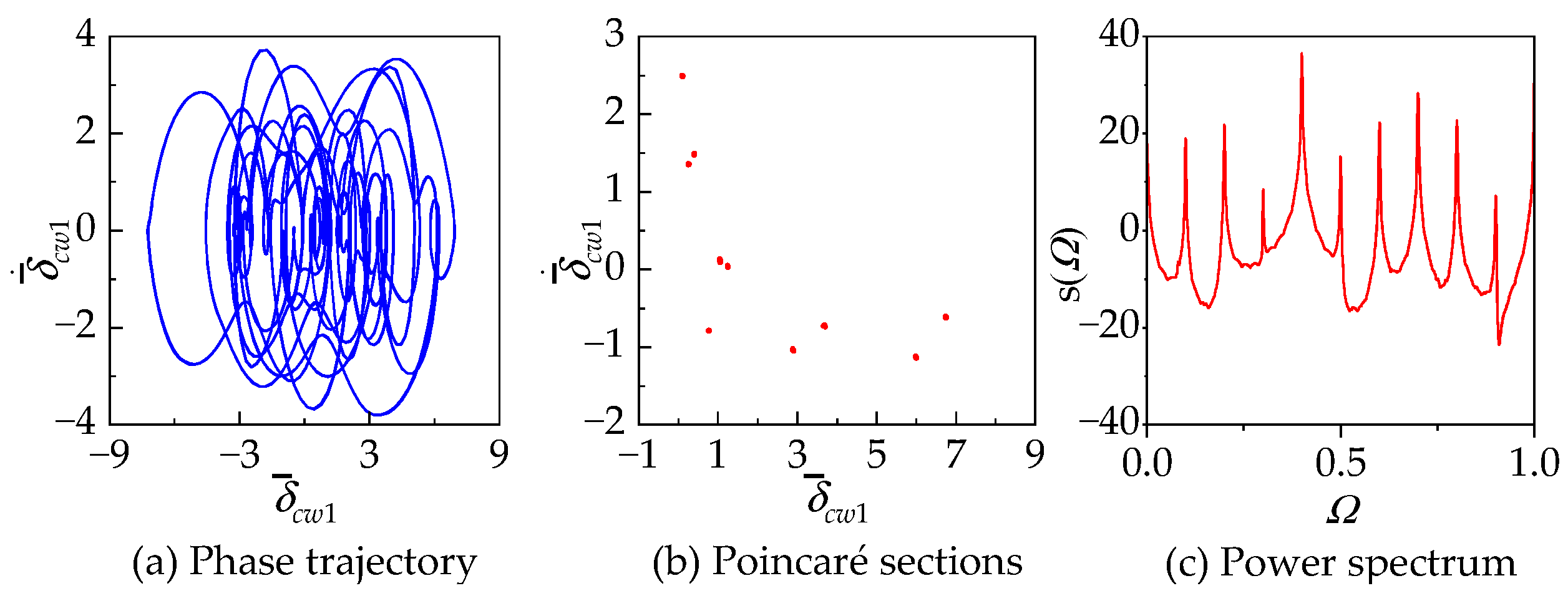
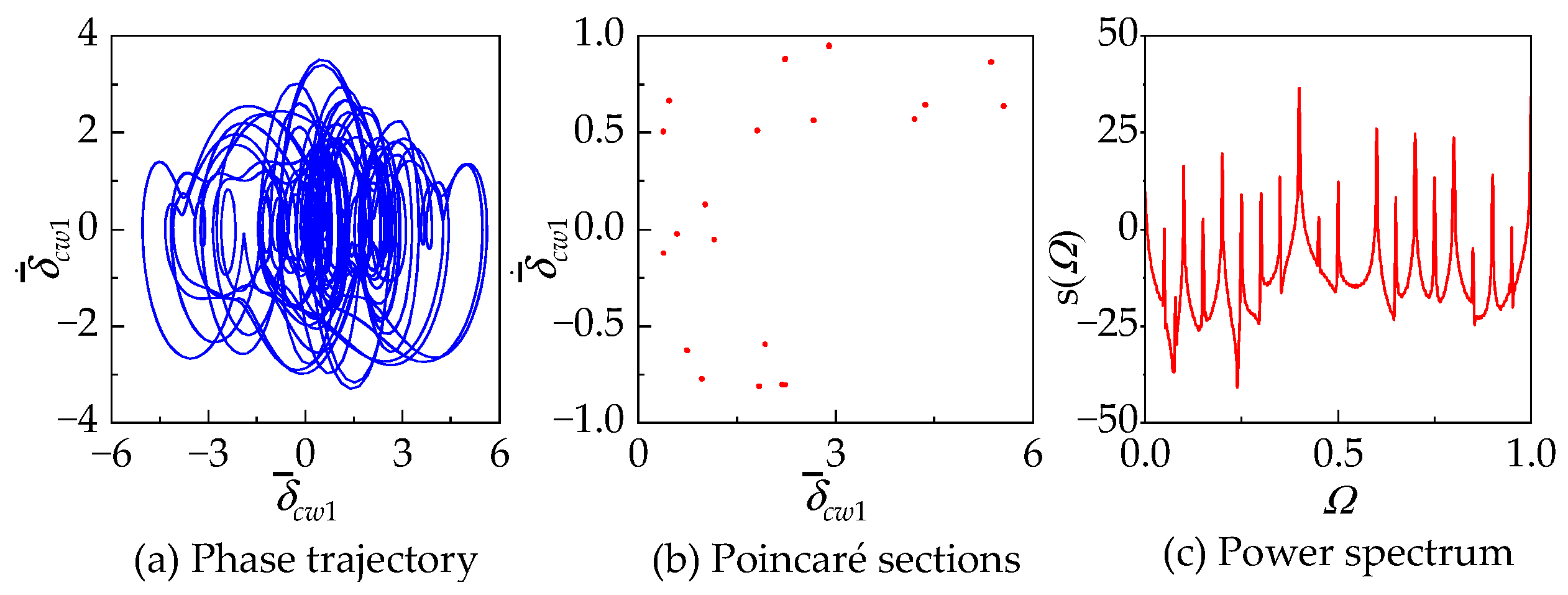
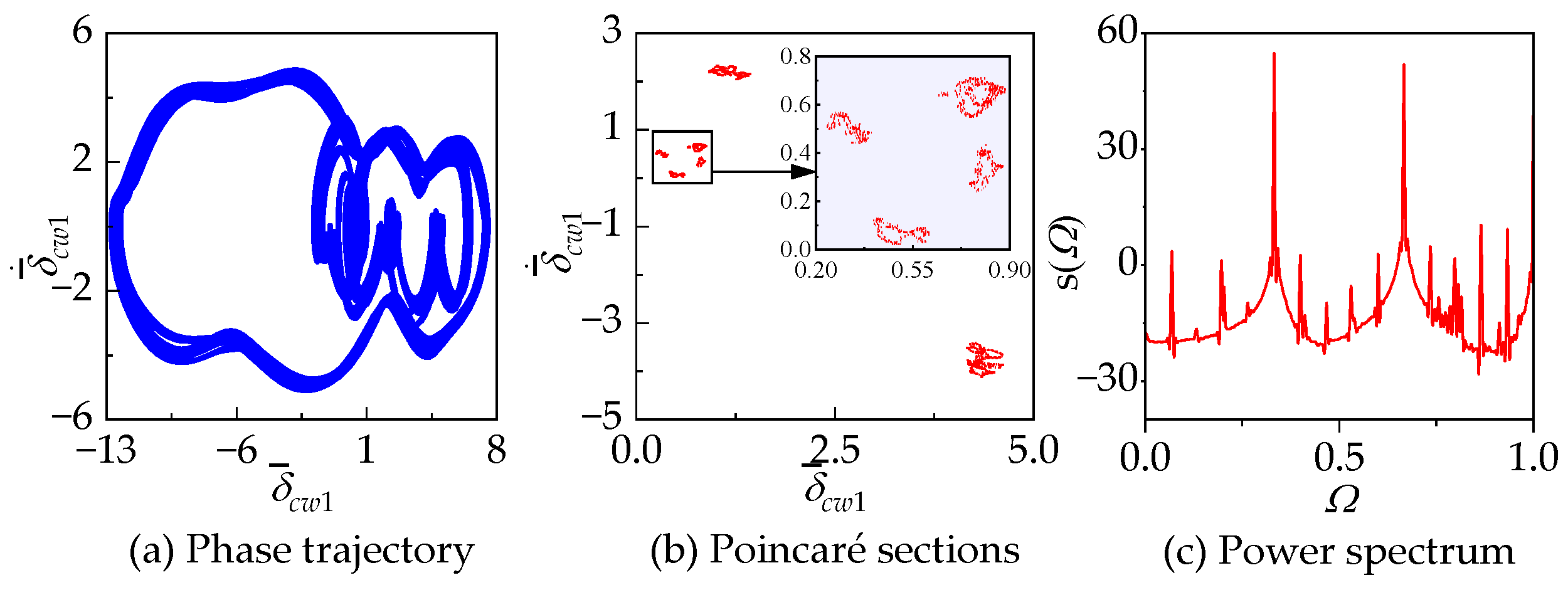
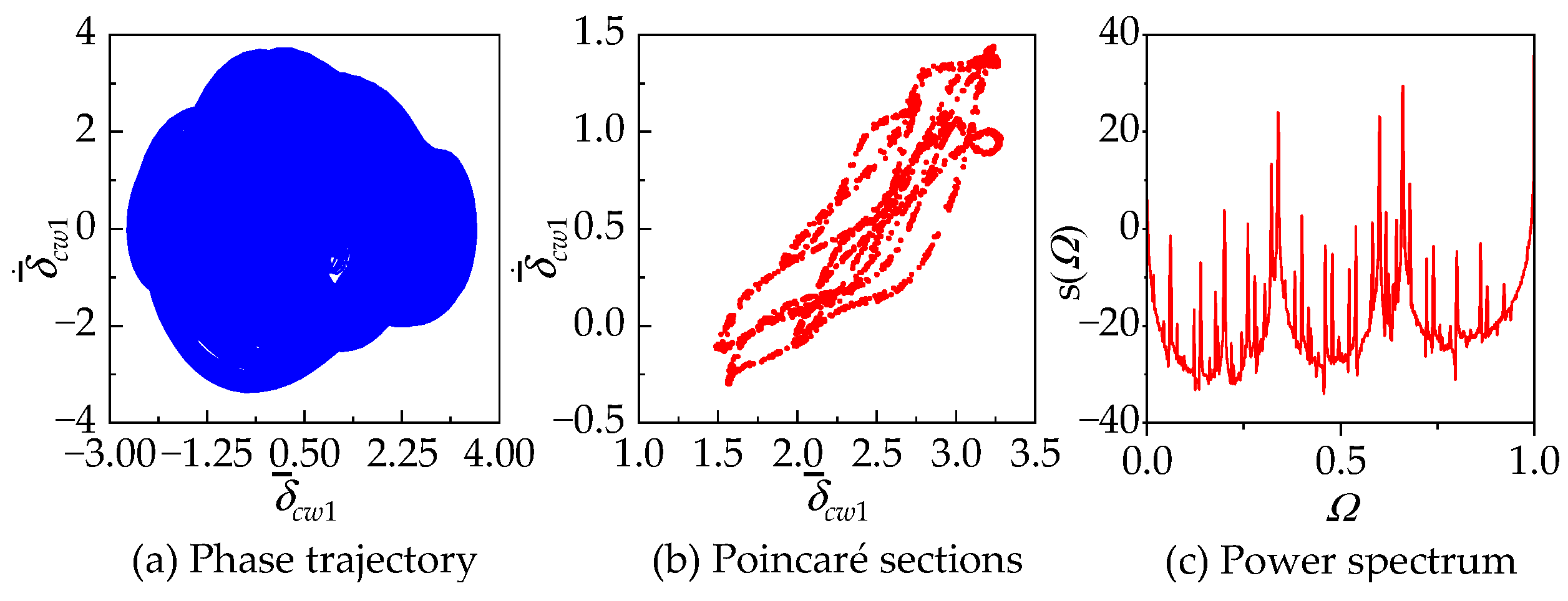
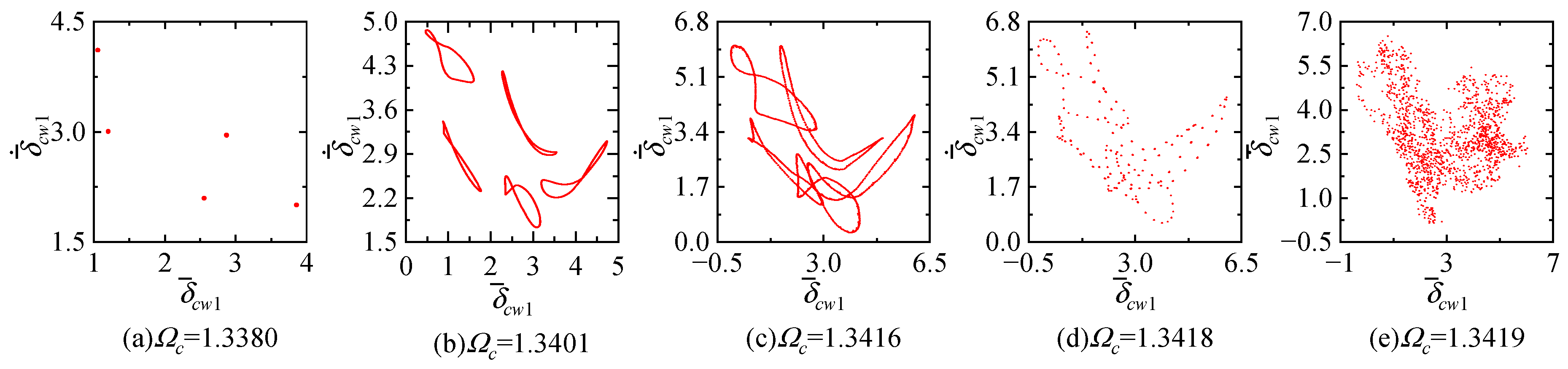
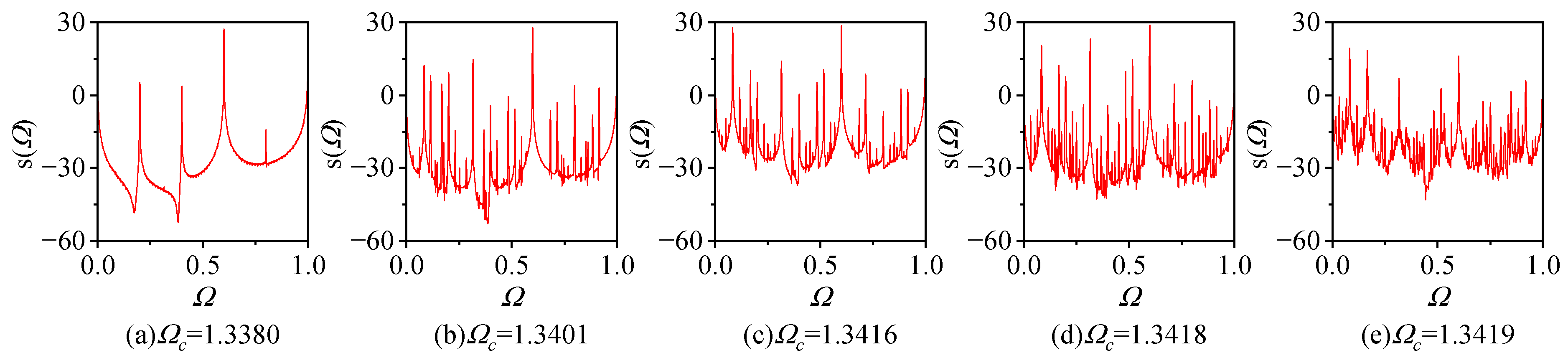
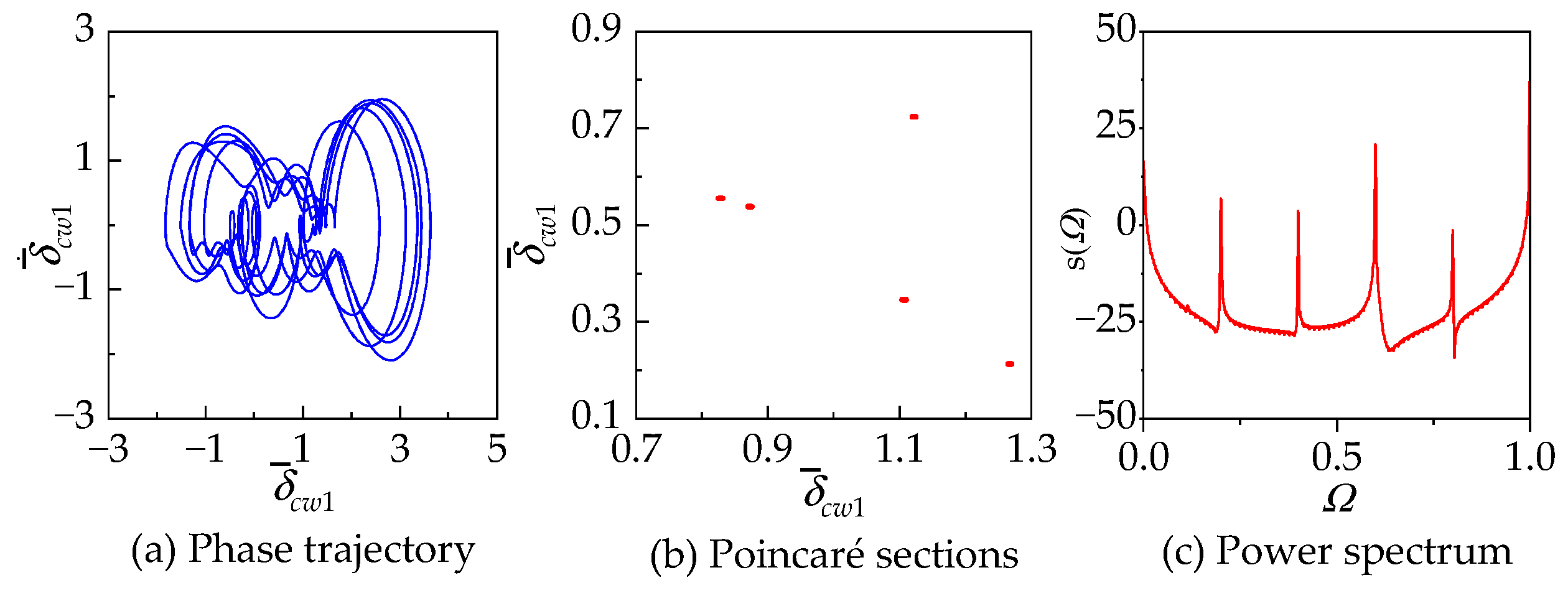
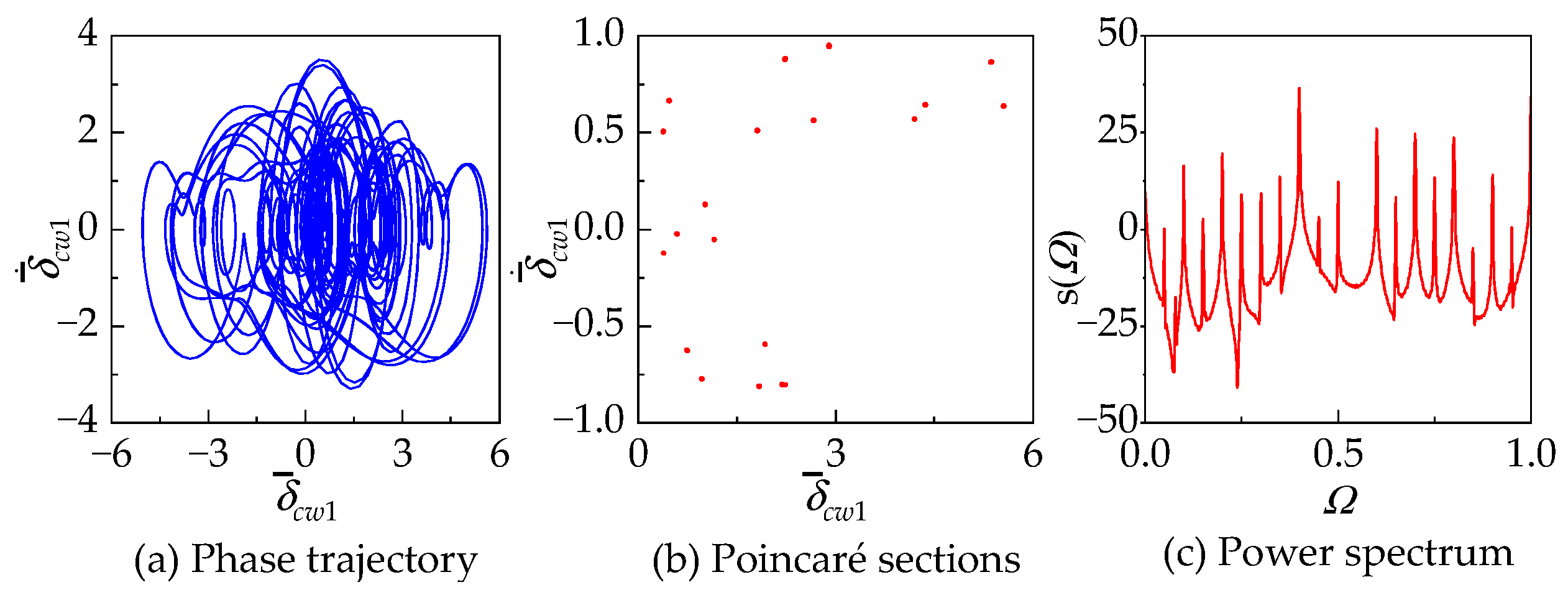
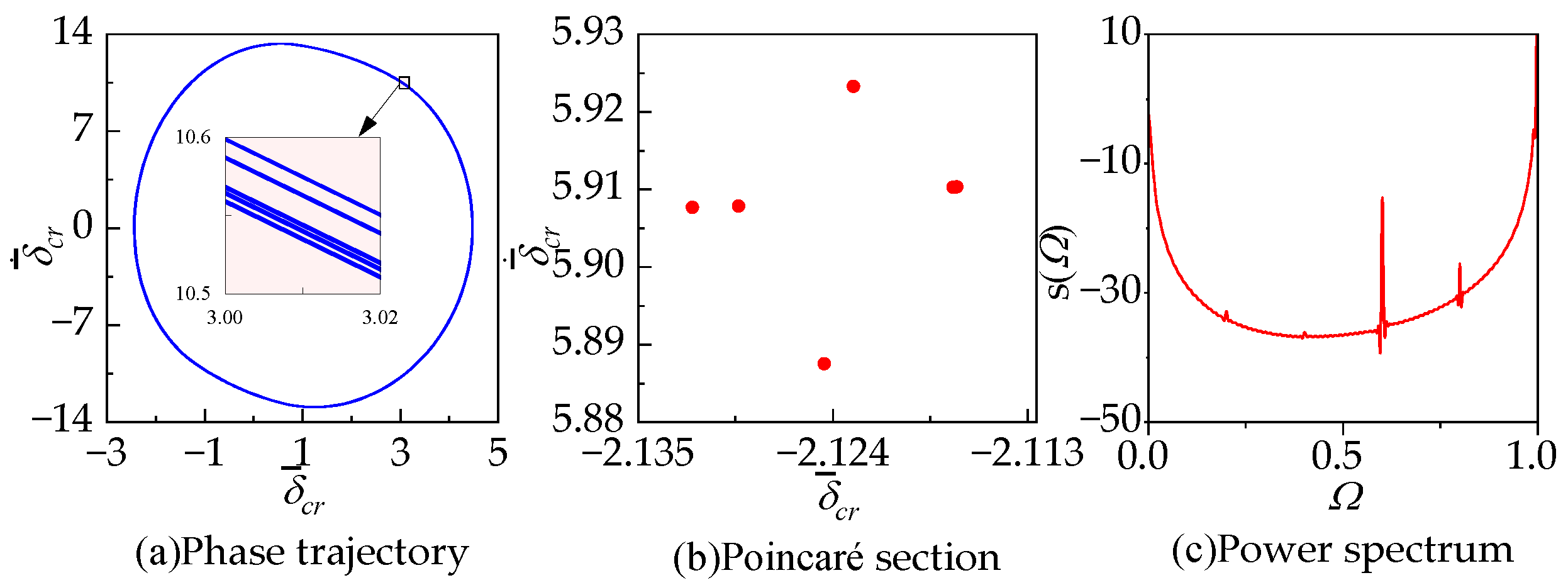
- Altering the excitation frequency induces changes in the motion states, marked by the occurrence of fold bifurcation, Hopf bifurcation, and inverse Hopf bifurcation, leading to variations between periodic and quasiperiodic motions. Several conventional routes to chaos emerge throughout this process, including the quasiperiodic route, boundary crisis route, and intermittency route. This underscores that the RV reducer transmission system exhibits a wealth of nonlinear dynamic characteristics under factors such as time-varying mesh stiffness, errors, and backlash;
- (3)
- In the low-frequency range (), the motion states of the system are more intricate and variable compared to the high-frequency range (). Consequently, when the system operates in the low-frequency range, even slight variations in the excitation frequency can alter its motion states, making it more prone to entering chaotic intervals. Therefore, the prolonged operation of the RV reducer at low speeds should be avoided. At the same time, when designing RV reducer transmission systems, appropriately enhancing the meshing damping can significantly reduce the vibration of the system and improve system stability.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pham, A.D.; Ahn, H.J. High Precision Reducers for Industrial Robots Driving 4th Industrial Revolution: State of Arts, Analysis, Design, Performance Evaluation and Perspective. Int. J. Precis. Eng. Manuf.-Green Technol. 2018, 5, 519–533. [Google Scholar] [CrossRef]
- Yang, Y.H.; Zhou, G.C.; Chang, L.; Chen, G. A Modelling Approach for Kinematic Equivalent Mechanism and Rotational Transmission Error of RV Reducer. Mech. Mach. Theory 2021, 163, 104384. [Google Scholar] [CrossRef]
- Matejic, M.; Blagojevic, M.; Disic, A.; Matejic, M.; Milovanovic, V.; Miletic, I. A Dynamic Analysis of the Cycloid Disc Stress-Strain State. Appl. Sci. 2023, 13, 4390. [Google Scholar] [CrossRef]
- Stanojević, M.; Tomović, R.; Ivanović, L.; Stojanović, B. Critical Analysis of Design of Ravigneaux Planetary Gear Trains. Appl. Eng. Lett. J. Eng. Appl. Sci. 2022, 7, 32–44. [Google Scholar] [CrossRef]
- Jia, J.S.; Zhou, J.X.; Zeng, Q.F.; Cui, Q.W.; Zhang, R.H.; Wei, Z. Review of RV Reducers with Precision Gear Transmission. Mach. Tool Hydraul. 2023, 51, 189–196. [Google Scholar] [CrossRef]
- Hidaka, T.; Wang, H.; Ishida, T.; Matsumoto, K.; Hashimoto, M. Rotational Transmission Error of K-H-V Planetary Gears with Cycloid Gear: 1st Report, Analytical Method of the Rotational Transmission Error. Trans. Jpn. Soc. Mech. Eng. Ser. C 1994, 60, 645–653. [Google Scholar] [CrossRef]
- Ishida, T.; Wang, H.; Hidaka, T.; Hashimoto, M. Rotational Transmission Error of K-H-V-Type Planetary Gears with Cycloid Gears: 2nd Report, Effects of Manufacturing and Assembly Errors on Rotational Transmission Error. Trans. Jpn. Soc. Mech. Eng. Ser. C 1994, 60, 3510–3517. [Google Scholar] [CrossRef]
- Ren, Z.Y.; Mao, S.M.; Guo, W.C.; Guo, Z. Tooth Modification and Dynamic Performance of the Cycloidal Drive. Mech. Syst. Signal Process 2017, 85, 857–866. [Google Scholar] [CrossRef]
- Zhang, R.H.; Zhou, J.X.; Wei, Z. Study on Transmission Error and Torsional Stiffness of RV Reducer under Wear. J. Mech. Sci. Technol. 2022, 36, 4067–4081. [Google Scholar] [CrossRef]
- Xu, L.X.; Xia, C.; Yang, B. Analysis and Test on Dynamic Transmission Errors of RV Reducers under Load Conditions. China Mech. Eng. 2023, 34, 2143–2152. [Google Scholar] [CrossRef]
- Wei, Z.; Zhou, J.X.; Cui, Q.W.; Jia, J.S.; Zhang, R.H.; Liu, G.C. A Method to Analyze Dynamic Transmission Error of RV Reducer Considering Machining Error and Flexible Factors. J. Xi’an Jiaotong Univ. 2023, 57, 161–172. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.Q.; Ding, C.C.; Guo, R.; Niu, W.L. Dynamic Modeling and Analysis of an RV Reducer Considering Tooth Profile Modifications and Errors. Machines 2023, 11, 626. [Google Scholar] [CrossRef]
- Jiang, Z.H.; Zhang, X.L.; Liu, J.Q. A Reliability Evaluation Method for RV Reducer by Combining Multi-Fidelity Model and Bayesian Updating Technology. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1043, 052038. [Google Scholar] [CrossRef]
- Wang, H.L.; Fu, W.H.; Fang, K.; Chen, T.C. Transmission Characteristics of an RV Reducer Based on ADAMS. J. Mech. Sci. Technol. 2024, 38, 787–802. [Google Scholar] [CrossRef]
- Wang, Z.H.; Xu, R.; Pan, J.B.; Chen, Q.Q.; Zhang, J.; Wang, J.G. Effect of Multifactor Interaction on the Accuracy of RV Reducers. Int. J. Rotating Mach. 2023, 2023, 5692229. [Google Scholar] [CrossRef]
- Zhang, Y.H.; Xiao, J.J.; He, W.D. Dynamical Formulation and Analysis of RV Reducer. In Proceedings of the 2009 International Conference on Engineering Computation, Hong Kong, China, 2–3 May 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 201–204. [Google Scholar] [CrossRef]
- Zhang, Y.H.; He, W.D.; Xiao, J.J. Dynamical Model of RV Reducer and Key Influence of Stiffness to the Nature Character. In Proceedings of the 2010 Third International Conference on Information and Computing, Wuxi, China, 4–6 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 192–195. [Google Scholar] [CrossRef]
- Chen, C.; Yang, Y.H. Structural Characteristics of Rotate Vector Reducer Free Vibration. Shock Vib. 2017, 2017, 4214370. [Google Scholar] [CrossRef]
- Pan, W.; Zhang, H.; Chen, C. Effect of Mesh Phasing on Dynamic Response of Rotate Vector Reducer. Int. J. Ind. Syst. Eng. 2021, 1, 190–209. [Google Scholar] [CrossRef]
- Wang, S.; Tan, J.; Gu, J.J.; Huang, D.S. Study on Torsional Vibration of RV Reducer Based on Time-Varying Stiffness. J. Vib. Eng. Technol. 2021, 9, 73–84. [Google Scholar] [CrossRef]
- Zhang, D.Q.; Li, X.A.; Yang, M.D.; Wang, F.; Han, X. Non-Random Vibration Analysis of Rotate Vector Reducer. J. Sound Vib. 2023, 542, 117380. [Google Scholar] [CrossRef]
- Xu, L.; Xia, C.; Chang, L. Dynamic Modeling and Vibration Analysis of an RV Reducer with Defective Needle Roller Bearings. Eng. Fail. Anal. 2024, 157, 107884. [Google Scholar] [CrossRef]
- Xu, L.X.; Chen, B.K.; Li, C.Y. Dynamic Modelling and Contact Analysis of Bearing-Cycloid-Pinwheel Transmission Mechanisms Used in Joint Rotate Vector Reducers. Mech. Mach. Theory 2019, 137, 432–458. [Google Scholar] [CrossRef]
- Xu, L.X. A Study on Dynamic Load Characteristics of Multi-group Needle Roller Bearings Used in RV Reducer Considering the Position Errors. China Mech. Eng. 2022, 58, 144–155. [Google Scholar] [CrossRef]
- Zheng, J.K.; Wang, H.; Kumar, A.; Xiang, J.W. Dynamic Model-Driven Intelligent Fault Diagnosis Method for Rotary Vector Reducers. Eng. Appl. Artif. Intell. 2023, 124, 106648. [Google Scholar] [CrossRef]
- Shan, L.; He, W. Study on Nonlinear Dynamics of RV Transmission System Used in Robot Joints. In Recent Advances in Mechanism Design for Robotics; Bai, S., Ceccarelli, M., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2015; Volume 33, pp. 317–324. ISBN 978-3-319-18125-7. [Google Scholar]
- Shan, L.J.; Fang, X.; He, W.D. Nonlinear Dynamic Model and Equations of RV Transmission System. Adv. Mater. Res. 2012, 510, 536–540. [Google Scholar] [CrossRef]
- Han, L.S.; Shen, Y.W.; Dong, J.H.; Wang, G.F.; Liu, J.Y.; Qi, H.J. Theoretical Research on Dynamic Transmission Accuracy for 2K-V Type Drive. J. Mech. Eng. 2007, 43, 81–86. [Google Scholar] [CrossRef]
- Zheng, Y.X.; Xi, Y.; Bu, W.H.; LI, M.R. Nonlinear Characteristic Analysis of 5-degree-of-freedom Pure Torsional Model of RV Reducer. J. Zhejiang Univ. (Eng. Sci.) 2018, 52, 2098–2109+2119. [Google Scholar] [CrossRef]
- Zheng, Y.X.; Wang, X.; Xi, Y.; Liu, J.S. Nonlinear Characteristics Analysis of Translational-Torsional Coupled Dynamic Model of RV Reducer. In Proceedings of the 2019 International Conference on Advances in Construction Machinery and Vehicle Engineering, Changsha, China, 14–16 May 2019; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Blankenship, G.W.; Kahraman, A. Steady State Forced Response of a Mechanical Oscillator with Combined Parametric Excitation and Clearance Type Non-Linearity. J. Sound Vib. 1995, 185, 743–765. [Google Scholar] [CrossRef]
- Kahraman, A.; Blankenship, G.W. Experiments on Nonlinear Dynamic Behavior of an Oscillator with Clearance and Periodically Time-Varying Parameters. J. Appl. Mech. 1997, 64, 217–226. [Google Scholar] [CrossRef]
- Kahraman, A.; Blankenship, G.W. Effect of Involute Contact Ratio on Spur Gear Dynamics. J. Mech. Des. 1999, 121, 112–118. [Google Scholar] [CrossRef]
- Byrtus, M.; Zeman, V. On Modeling and Vibration of Gear Drives Influenced by Nonlinear Couplings. Mech. Mach. Theory 2011, 46, 375–397. [Google Scholar] [CrossRef]
- Margielewicz, J.; Gąska, D.; Litak, G. Modelling of the Gear Backlash. Nonlinear Dyn. 2019, 97, 355–368. [Google Scholar] [CrossRef]
- Chen, S.Y.; Tang, J.Y.; Luo, C.W.; Wang, Q.B. Nonlinear Dynamic Characteristics of Geared Rotor Bearing Systems with Dynamic Backlash and Friction. Mech. Mach. Theory 2011, 46, 466–478. [Google Scholar] [CrossRef]
- Wang, Z.Z.; Pu, W.; Pei, X.; Cao, W. Nonlinear Dynamical Behaviors of Spiral Bevel Gears in Transient Mixed Lubrication. Tribol. Int. 2021, 160, 107022. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, Y.D.; Tian, W.F.; Wu, Y.M.; Chen, Y.L. An Improved Nonlinear Dynamic Model of Gear Pair with Tooth Surface Microscopic Features. Nonlinear Dyn. 2019, 96, 1615–1634. [Google Scholar] [CrossRef]
- Sakaridis, E.; Spitas, V.; Spitas, C. Non-Linear Modeling of Gear Drive Dynamics Incorporating Intermittent Tooth Contact Analysis and Tooth Eigenvibrations. Mech. Mach. Theory 2019, 136, 307–333. [Google Scholar] [CrossRef]
- Al-Shyyab, A.; Kahraman, A. A Non-Linear Dynamic Model for Planetary Gear Sets. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2007, 221, 567–576. [Google Scholar] [CrossRef]
- Ambarisha, V.K.; Parker, R.G. Nonlinear Dynamics of Planetary Gears Using Analytical and Finite Element Models. J. Sound Vib. 2007, 302, 577–595. [Google Scholar] [CrossRef]
- Li, S.; Wu, Q.M.; Zhang, Z.Q. Bifurcation and Chaos Analysis of Multistage Planetary Gear Train. Nonlinear Dyn. 2013, 75, 217–233. [Google Scholar] [CrossRef]
- Wang, J.G.; Zhang, W.; Long, M.; Liu, D.J. Study on Nonlinear Bifurcation Characteristics of Multistage Planetary Gear Transmission for Wind Power Increasing Gearbox. IOP Conf. Ser. Mater. Sci. Eng. 2018, 382, 042007. [Google Scholar] [CrossRef]
- Liu, S.X.; Hu, A.J.; Sun, Y.Y.; Xiang, L.; Zhu, Y.C. Chaos and Impact Characteristics Analysis of a Multistage Planetary Gear System Based on the Energy Method. Int. J. Bifurc. Chaos 2023, 33, 2350046. [Google Scholar] [CrossRef]
- Liu, S.X.; Hu, A.; Zhang, Y.; Xiang, L. Nonlinear Dynamics Analysis of a Multistage Planetary Gear Transmission System. Int. J. Bifurc. Chaos 2022, 32, 2250096. [Google Scholar] [CrossRef]
- Xiang, L.; Liu, S.X.; Zhang, J.H. Nonlinear Dynamic Characteristics of Two-stage Planetary Gear Transmissionsystem in Wind Turbinegearbox. J. Vib. Shock 2020, 39, 193–199+229. [Google Scholar] [CrossRef]
- Yang, R.G.; Han, B.; Li, F.P.; Zhou, Y.Q.; Xiang, J.W. Nonlinear Dynamic Analysis of a Trochoid Cam Gear. J. Mech. Des. 2020, 142, 094502. [Google Scholar] [CrossRef]
- Yang, R.G.; Li, F.P.; Zhou, Y.Q.; Xiang, J.W. Nonlinear Dynamic Analysis of a Cycloidal Ball Planetary Transmission Considering Tooth Undercutting. Mech. Mach. Theory 2020, 145, 103694. [Google Scholar] [CrossRef]
- Yang, R.G.; An, Z.J.; Jiang, W. Bifurcation Characteristics Study of Cycloid Ball Planetary Transmission. J. Vib. Shock 2017, 36, 134–140. [Google Scholar] [CrossRef]
- Yang, R.G.; An, Z.J. Theoretical Calculation and Experimental Verification of the Elastic Angle of a Cycloid Ball Planetary Transmission Based on the Axial Pretightening Force. Adv. Mech. Eng. 2017, 9, 168781401773411. [Google Scholar] [CrossRef]
- Chen, Z.M.; Ou, Y.; Long, S.Y.; Peng, W.H.; Yang, Z.X. Vibration Characteristics Analysis of the New Pin-Cycloid Speed Reducer. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 55. [Google Scholar] [CrossRef]
- Palmgren, A.; Ruley, B. Ball and Roller Bearing Engineering; SKF Industries Inc.: Philadelphia, PA, USA; Burbank, CA, USA, 1959. [Google Scholar]
- Jia, J.S.; Zhou, J.X.; Zeng, Q.F.; Li, G.K.; Wang, H.W.; Zhang, R.H. Research on the Influence of Flexible Factors on Dynamic Transmission Error in RV Reducer. Mach. Tool Hydraul. 2023, 51, 158–165. [Google Scholar] [CrossRef]
- Yoshida, N.; Kobayashi, S.; Suetomi, I.; Miura, K. Equivalent Linear Method Considering Frequency Dependent Characteristics of Stiffness and Damping. Soil Dyn. Earthq. Eng. 2002, 22, 205–222. [Google Scholar] [CrossRef]
- Lin, H.H.; Liou, C.H. A Parametric Study of Spur Gear Dynamics; University of Memphis: Memphis, TN, USA, 1998. [Google Scholar]
- Yi, Y.Y.; Qin, D.T.; Liu, C.Z. Investigation of Electromechanical Coupling Vibration Characteristics of an Electric Drive Multistage Gear System. Mech. Mach. Theory 2018, 121, 446–459. [Google Scholar] [CrossRef]
- Xiang, L.; Gao, N.; Hu, A.J. Dynamic Analysis of a Planetary Gear System with Multiple Nonlinear Parameters. J. Comput. Appl. Math. 2018, 327, 325–340. [Google Scholar] [CrossRef]
- Shi, J.; Ma, X.; Xu, C.; Zang, S. Meshing Stiffness Analysis of Gear Using the Ishikawa Method. Appl. Mech. Mater. 2013, 401–403, 203–206. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Gears | Design Parameters | Value |
|---|---|---|
| Involute gear | Number of sun gear teeth Zs | 12 |
| Number of planetary gear teeth Zp | 36 | |
| Modulus m (mm) | 1.5 | |
| Meshing angle () | 20 | |
| Cycloidal pinwheel | Number of pinwheels Zw | 40 |
| Number of cycloidal gear teeth Zc | 39 | |
| Eccentricity distance e (mm) | 1.3 | |
| Pin position radius rc (mm) | 85.8 |
| Name of the Component | Symbol | Mass (kg) | Moment of Inertia (kg·m2) |
|---|---|---|---|
| Sun gear (s) | ms | 1.30 | |
| Planetary gear (p) | mp | 0.88 | |
| Crankshaft (H) | mH | 0.40 | |
| Cycloidal gear (c) | mc | 2.76 | |
| Carrier (o) | mo | 15.33 |
| Parameter Name | Value |
|---|---|
| kspm (N·m−1) | |
| kcrm (N·m−1) | |
| kcb (N·m−1) | |
| kHb (N·m−1) | |
| ko (N·m−1) | |
| ks (N·m−1) | |
| kp (N·m−1) | |
| kst (N·m/rad) | |
| kHt (N·m/rad) |
| Regions Code | Frequency Interval |
|---|---|
| Regions A | |
| Regions B | |
| Regions C | |
| Regions D | |
| Regions E | |
| Regions F |
| Region Code | Frequency Interval | Motion State |
|---|---|---|
| Regions V | 5 periodic motion | |
| Regions VI | 5 quasi-periodic motion | |
| Regions VII | 5 periodic motion | |
| Regions VIII | chaos |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Z.; Wang, H.; Li, R.; Shan, W.; Zhao, Y.; Xu, H.; Tan, Q.; Liu, C.; Du, Y. Study on Nonlinear Dynamic Characteristics of RV Reducer Transmission System. Energies 2024, 17, 1178. https://doi.org/10.3390/en17051178
Han Z, Wang H, Li R, Shan W, Zhao Y, Xu H, Tan Q, Liu C, Du Y. Study on Nonlinear Dynamic Characteristics of RV Reducer Transmission System. Energies. 2024; 17(5):1178. https://doi.org/10.3390/en17051178
Chicago/Turabian StyleHan, Zhenhua, Hao Wang, Rirong Li, Wentao Shan, Yunda Zhao, Huachao Xu, Qifeng Tan, Chang Liu, and Youwu Du. 2024. "Study on Nonlinear Dynamic Characteristics of RV Reducer Transmission System" Energies 17, no. 5: 1178. https://doi.org/10.3390/en17051178
APA StyleHan, Z., Wang, H., Li, R., Shan, W., Zhao, Y., Xu, H., Tan, Q., Liu, C., & Du, Y. (2024). Study on Nonlinear Dynamic Characteristics of RV Reducer Transmission System. Energies, 17(5), 1178. https://doi.org/10.3390/en17051178