
Power Compatibility of Induction Motors in Industrial Grids Containing Synchronous Generators


Abstract
1. Introduction
- Topology of the industrial grid;
- Topology and ratings of the power plant auxiliaries;
- Ability to generate reactive power of each synchronous generator;
- Applications of excitation unit and voltage control systems of synchronous generators;
- The starting methods of powerful MV induction motors.
2. Concerns about Starting Induction Motors in Industrial Grids
2.1. Induction Motors in Industrial Plants
- Cooperation with boilers and synchronous generators to support the operation of devices and equipment installed in the boiler room, engine room, and flue gas desulphurisation installations, which are called auxiliaries of the power plant;
- Supporting the manufacturing processes of the main production.
2.2. Starting Induction Motors in Industrial Grids
- —the rated power of the largest motor in the industrial grid;
- —the total value of the short circuit capacity of the industrial power grid;
- —the motor starting coefficient;
- —the voltage on motor terminals before the starting;
- —the rated voltage of the motor.
2.3. The Starting Methods of MV Induction Motors
3. Synchronous Generator under Starting Large Induction Motor
4. Case Study
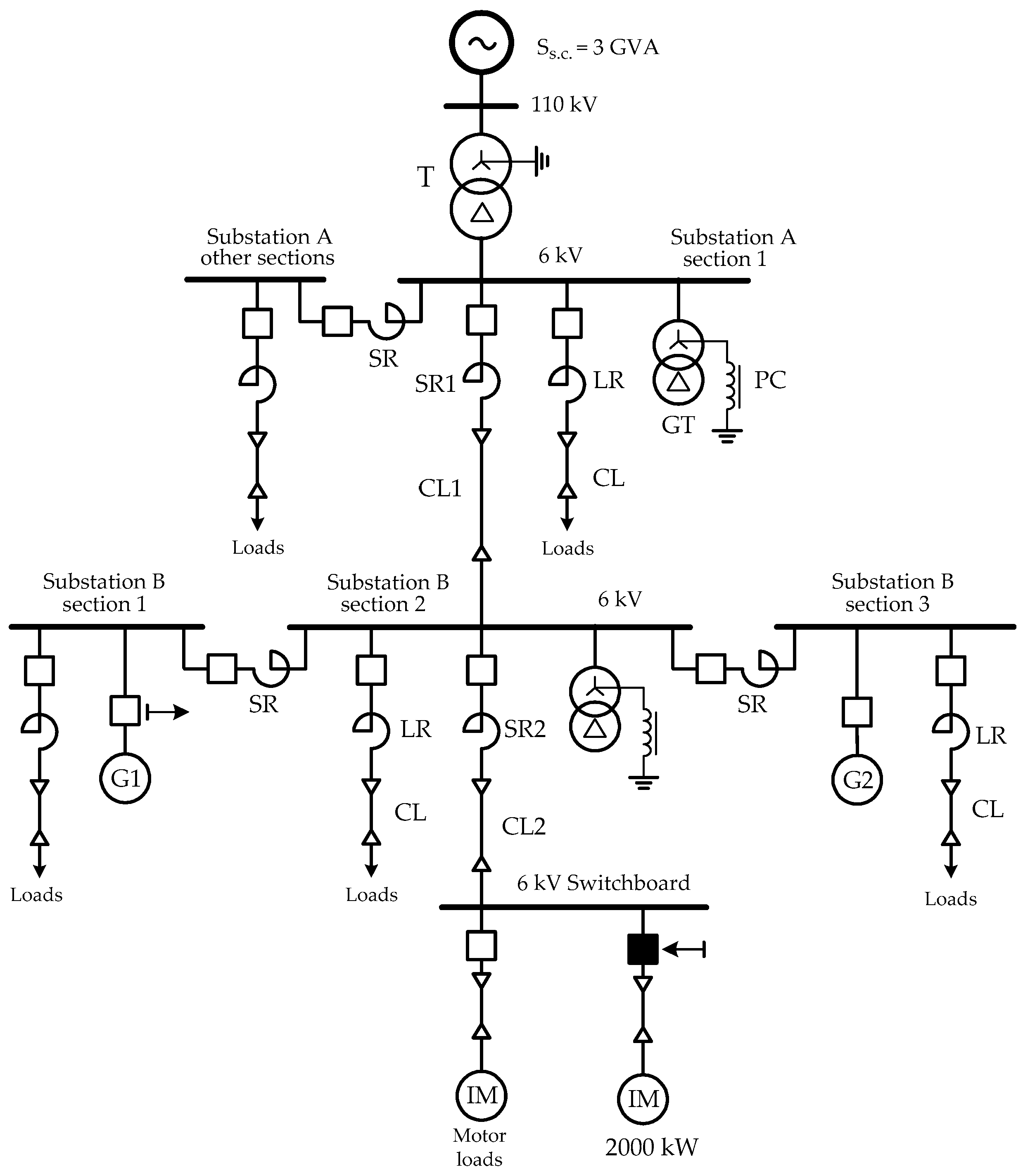
4.1. The Analysed Industrial Grid
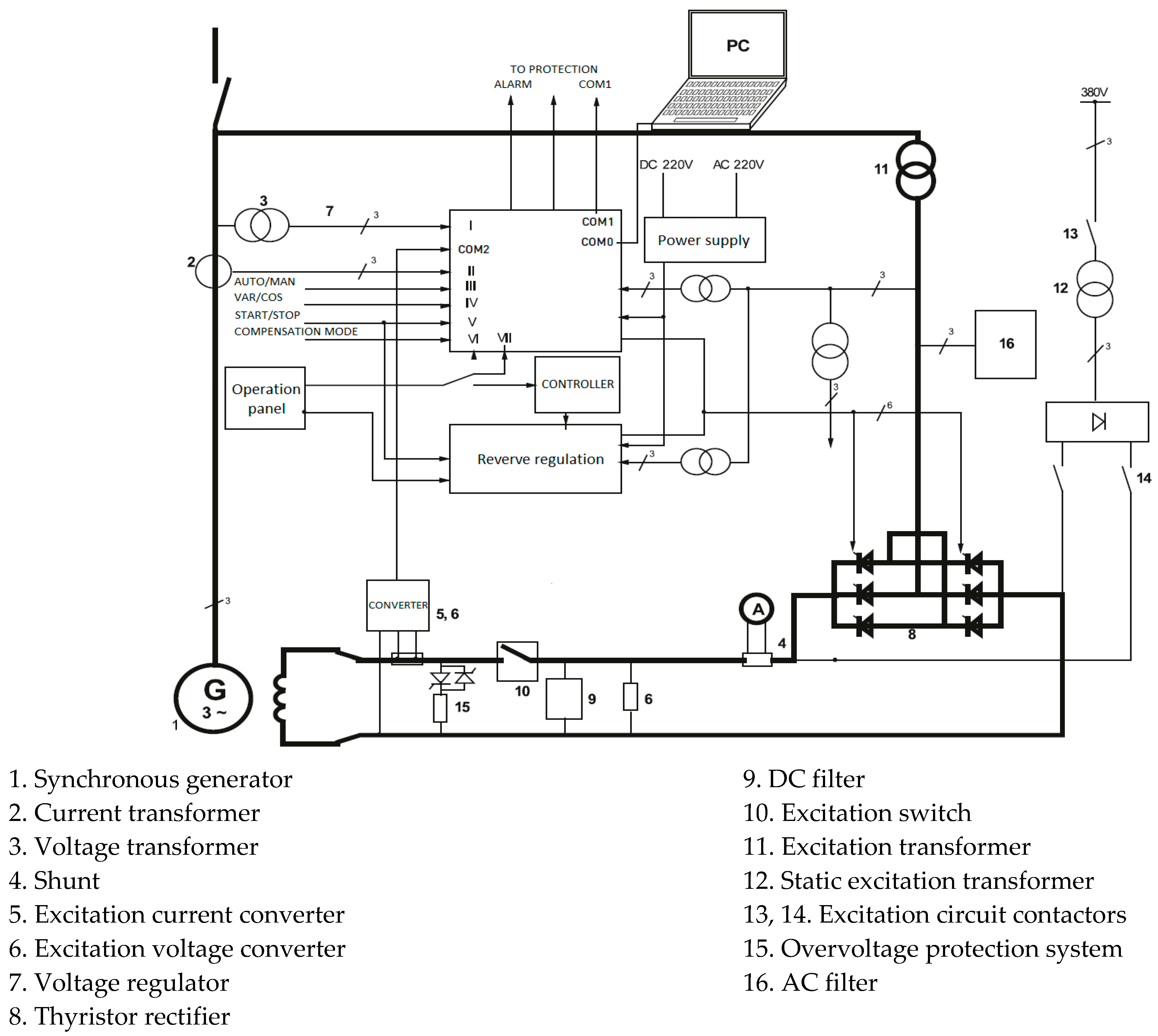
- Voltage regulator, which ensures the generator voltage with an accuracy of ±0.5% of the rated voltage;
- Excitation current limiter, which protects the unit against overload;
- Excitation current limiter, which limits the generator’s reactive capacitive power to avoid overheat of stator iron packages and prevents trip off the generator due to failure of synchronization;
- Induction current limiter, which reduces the generator voltage by lowering the frequency and protects the unit and power transformers from exceeding the permissible flux value in iron;
- Tracking system, which ensures the proper excitation operation during changing modes between automatic and manual mode;
- System stabilizer, which reduces the low-frequency oscillations of the rotor generator and allows its stabilization during operation at large loads.
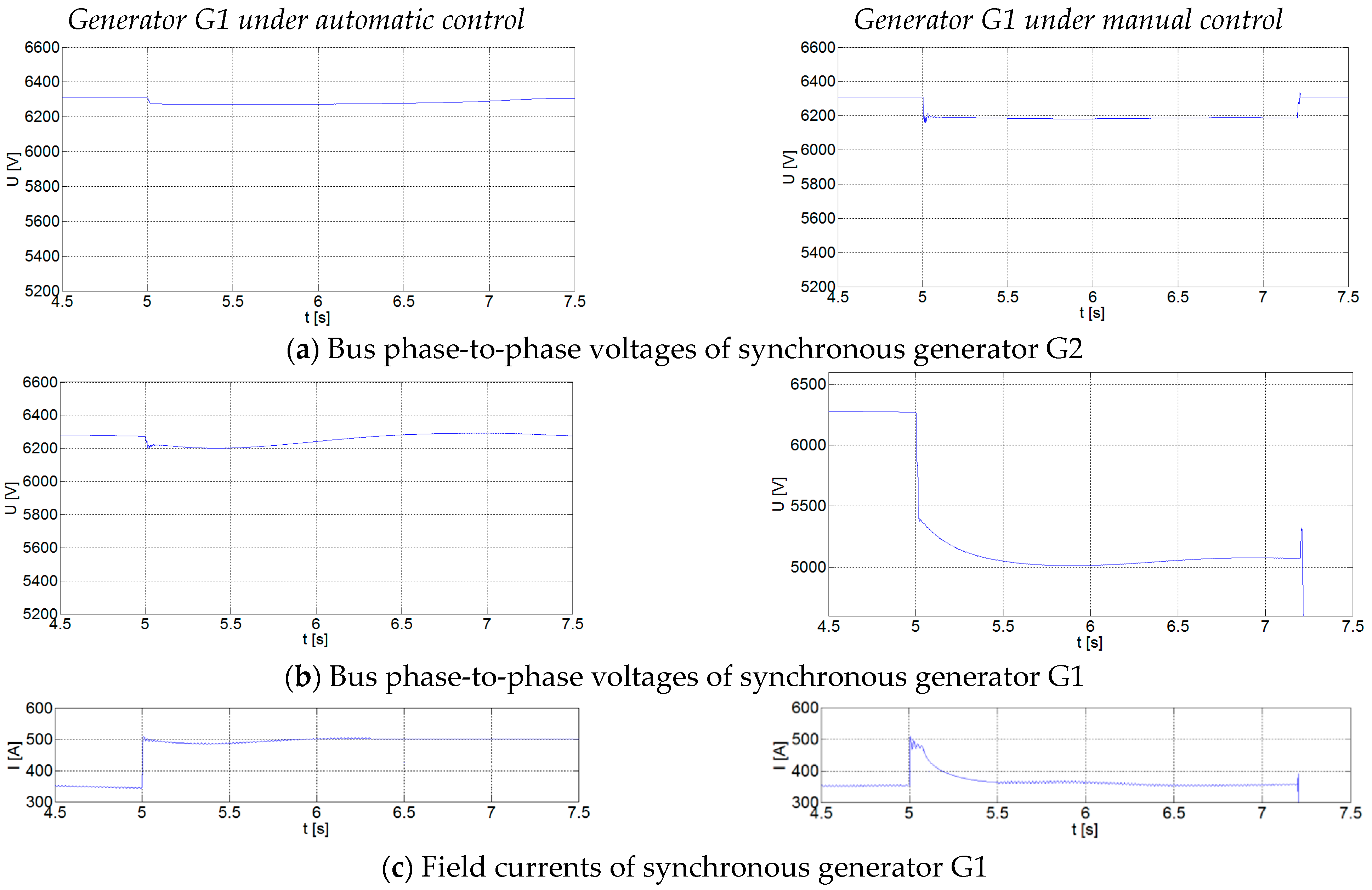
4.2. Emergency Synchronous Generator Trip Analysis
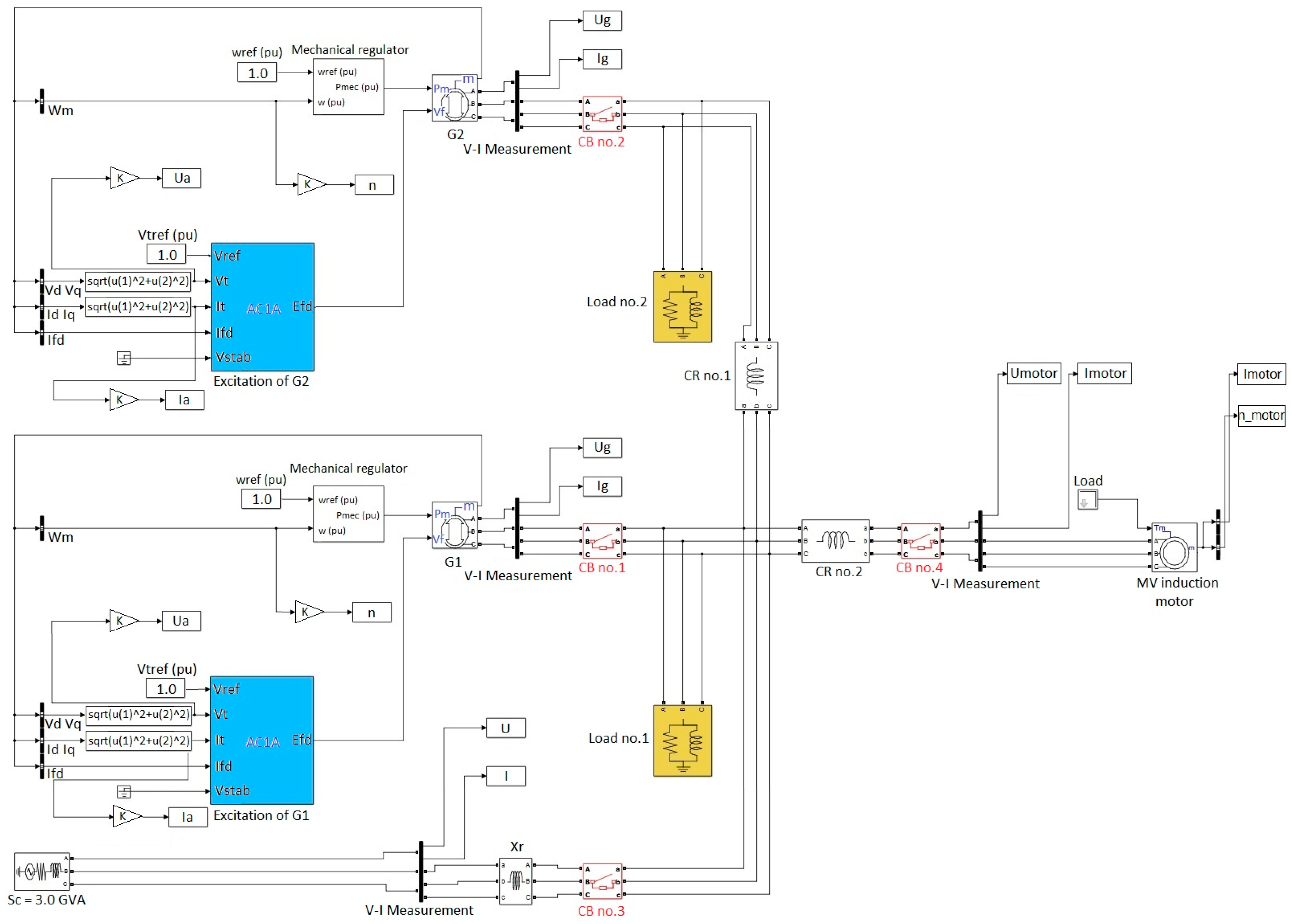
4.3. Modelling the Industrial Grid
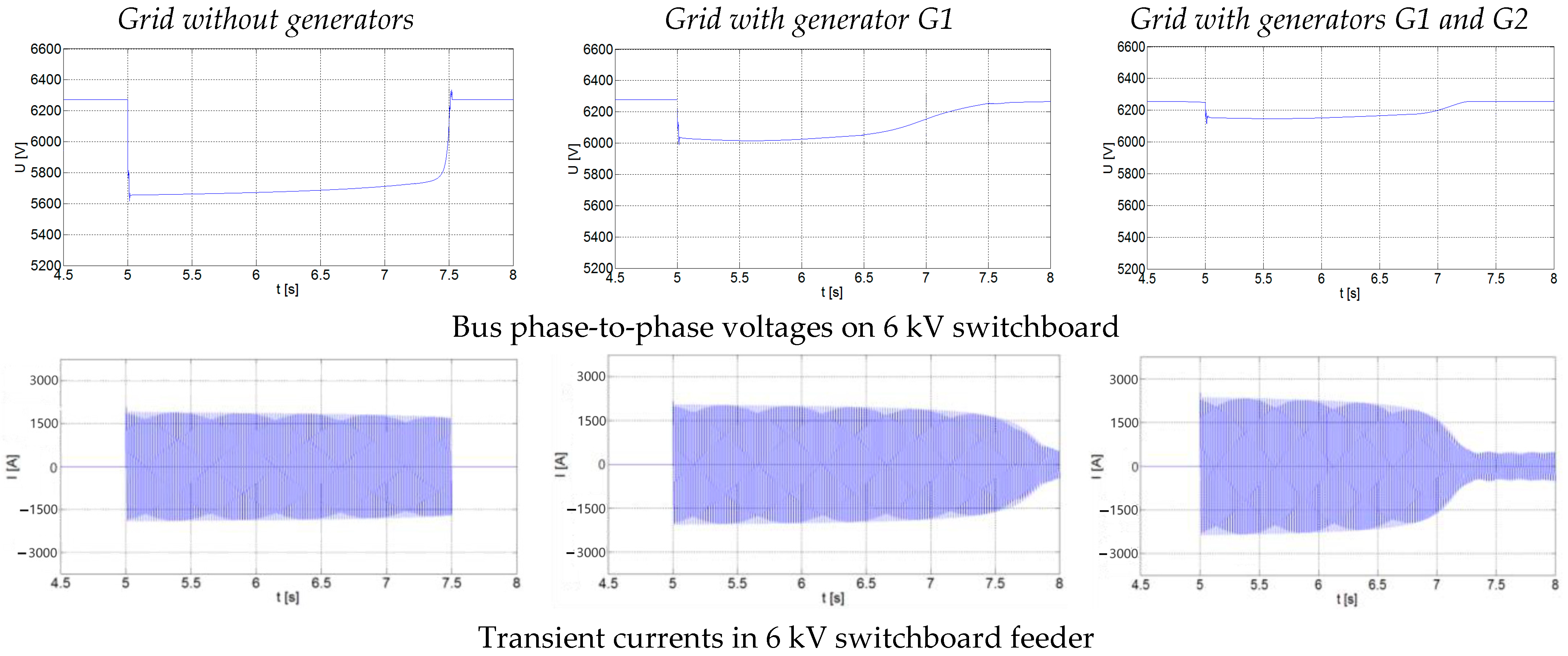
4.4. Results of Simulations and Discussion
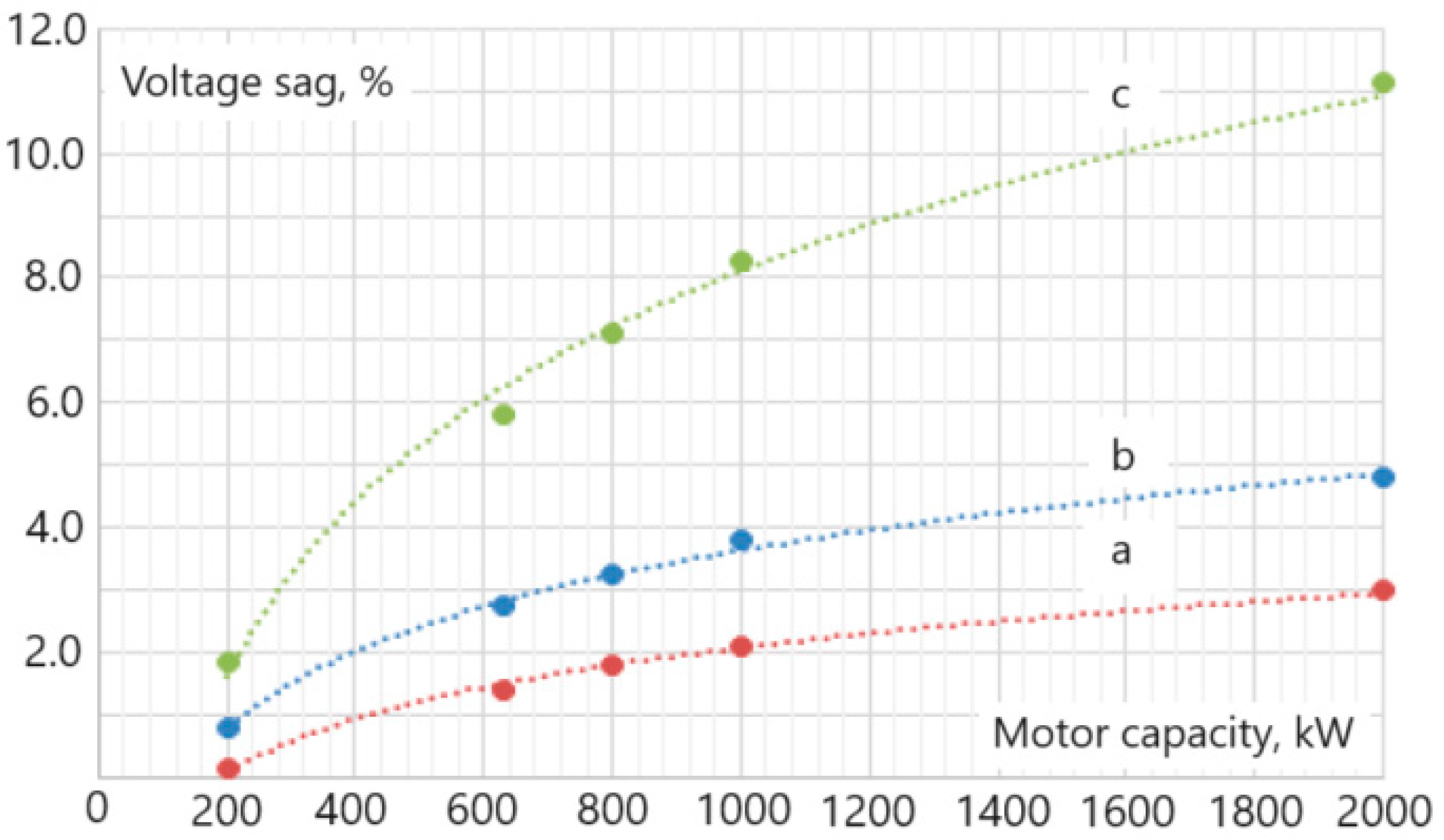
- External bulk grid transformer 110/6 kV;
- External bulk grid transformer 110/6 kV and generator G1;
- External bulk grid transformer 110/6 kV and generators G1 and G2. Both generators G1 and G2 are operated with the automatic control of the excitation system.
5. Conclusions
- The availability of synchronous generators within the industrial grid supports better motor-starting conditions and lower voltage sags on the grid busses;
- To start the large motors in an industrial grid containing synchronous generators, their control has to be set to automatic mode to prevent emergency tripping the grid equipment or generators;
- The low excitation current in the manual control mode of the synchronous generator during the long-lasting starting of large motors may provoke significant disturbances in the grid operation when protections of grid units are not properly coordinated;
- Settings of the generator protection system under-voltage and over-current relays have to be selected after a thorough analysis of the possible starting transients within the grid;
- Voltage control of an internal synchronous generator in normal operating conditions of the industrial grid must be carried out in automatic control mode; manual voltage control mode shall be only used during the generator synchronizing to a bulk power grid or just for the generator testing or inspection;
- Proper simulations of motor-starting transients in industrial grids containing internal generators can only be provided by adequate consideration of generator excitation control and protection systems, as well as the inertia characteristics of the grid motors and generators;
- Careful analysis of transients when starting large induction motors allows for developing requirements for configurations and operating conditions of industrial electrical grids aiming to ensure a smooth and trouble-free operation of the facility, where such motors are usually used to drive critical processes and equipment.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pawlik, M.; Strzelczyk, F. Power Plants; Scientific Publishing of PWN: Warsaw, Poland, 2012. [Google Scholar]
- Paska, J. Electricity Production; Scientific Publishing of the Warsaw University of Technology: Warsaw, Poland, 2020. [Google Scholar]
- Warecki, J.; Gajdzica, M. Energizing arc furnace transformer in power grid involving harmonic filter installation. Prz. Elektrotechniczny 2015, 4, 64–69. [Google Scholar] [CrossRef]
- Varetsky, Y.; Gajdzica, M. The procedure for selecting the ratings of capacitor banks and reactors of the filtering systems. Prz. Elektrotechniczny 2020, 3, 77–81. [Google Scholar] [CrossRef]
- Kotlicki, T. Improvement of energy efficiency in auxiliaries system of a power station. Energetyka 2013, 8, 627–630. [Google Scholar]
- Pawlik, M.; Skierski, J. Systems and Devices for Power Plant Auxiliaries; Scientific Publishing of WNT: Warsaw, Poland, 1986. [Google Scholar]
- Kotlicki, T. Energy efficiency of power plant auxiliaries. Prz. Elektrotechniczny 2021, 11, 154–158. [Google Scholar] [CrossRef]
- Latek, W. Turbogenerators; Scientific Publishing of WNT: Warsaw, Poland, 1973. [Google Scholar]
- Machowski, J.; Bialek, J.S.; Bumby, J.R. Power System Dynamics and Stability; John Wiley and Sons: Hoboken, NJ, USA, 1997. [Google Scholar]
- LeDoux, K.; Visser, P.W.; Hulin, J.D.; Nguyen, H. Starting large synchronous motors in weak power systems. In Proceedings of the Industry Applications Society 60th Annual Petroleum and Chemical Industry Conference, Chicago, IL, USA, 23–25 September 2013. [Google Scholar] [CrossRef]
- Yang, C.; Lee, B.S.; Jang, G.; Kim, S.; Jung, G.; Lee, J.; Shim, S.; Lim, Y.K.; Kim, J.; Park, S. Starting Current Analysis for Condition Monitoring of Medium Voltage Induction Motors in the Steel Industry. In Proceedings of the 2017 IEEE Industry Applications Society Annual Meeting, Cincinnati, OH, USA, 1–5 October 2017. [Google Scholar] [CrossRef]
- IEEE Std 3002.7-2018; IEEE Recommended Practice for Conducting Motor-Starting Studies and Analysis of Industrial and Commercial Power Systems. IEEE-SA Standards Board. IEEE: Piscataway, NJ, USA. [CrossRef]
- Hsu, C. Transient stability study of the large synchronous motors starting and operating for the isolated integrated steel-making facility. IEEE Trans. Ind. App. 2003, 39, 1436–1441. [Google Scholar] [CrossRef]
- Matanov, N. Study of the impact of induction motors starting on the supply voltage. In Proceedings of the 16th International Conference on Electrical Machines, Drives and Power Systems ELMA 2019, Varna, Bulgaria, 6–8 June 2019. [Google Scholar] [CrossRef]
- Matulewicz, W. Electrical Machines for Power Engineers; Scientific Publishing of the Gdańsk University of Technology: Warsaw, Poland, 1990. [Google Scholar]
- Paszek, W. Transient States of Alternating Current Electrical Machines; Scientific Publishing of WNT: Warsaw, Poland, 1986. [Google Scholar]
- Paszek, W. Dynamics of Alternating Current Electric Machines; Scientific Publishing of Helion: Gliwice, Poland, 1998. [Google Scholar]
- Sliwinski, T.; Głowacki, A. Starting Parameters of Induction Motors; Scientific Publishing of PWN: Warsaw, Poland, 1982. [Google Scholar]
- Fan, Z.; Shuqin, S.; Lei, Z.; Wenping, L.; Jian, W.; Liang, H. Study on Large Asynchronous Motor Starting Check for Auxiliary Power System. In Proceedings of the 2010 Asia-Pacific Power and Energy Engineering Conference, Chengdu, China, 28–31 March 2010. [Google Scholar] [CrossRef]
- Aree, P. Starting Time Calculation of Large Induction Motors Using their Manufacturer Technical Data. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Gumilar, L.; Afandi, A.N.; Sujito; Faiz, M.R. Starting Induction Motor at Different Voltage Levels in the Electrical Power System. In Proceedings of the 2021 International Conference on Electrical and Information Technology (IEIT), Malang, Indonesia, 14–15 September 2021; pp. 269–273. [Google Scholar] [CrossRef]
- Xiangang, Y.; Qinchang, G.; Yingjie, T.; Aiqiang, P. Research on Calculation Model of Voltage Sags due to High Voltage and Great Power Motor Starting. In Proceedings of the China International Conference on Electricity Distribution, Nanjing, China, 1–7 September 2010. [Google Scholar]
- Dabbousi, R.; Refai, J.; Persson, H. Motor Starting Requirements and Their Effect on Motor Design. In Proceedings of the 4th European Conference on Electrical and Instrumentation Applications in the Petroleum & Chemical Industry, Paryż, France, 13–15 June 2007. [Google Scholar] [CrossRef]
- Rahamani, R.; Akbarzadeh Niaki, A.; Sadeghi, S.H.H. Large Induction Motor Starting Time Determination for the Purpose of Protection Coordination. In Proceedings of the 27th Iranian Conference on Electrical Engineering (ICEE2019), Yazd, Iran, 30 April–2 May 2019; pp. 475–480. [Google Scholar] [CrossRef]
- Silva, L.; Giancotti, K.; Amaro, F.; Pires, I. Analysis of Burn Out and Random Trips at Starting of a 2984 kW Induction Motor Driving a Main Blower. In Proceedings of the 2014 IEEE Industry Application Society Annual Meeting, Vancouver, BC, Canada, 5–9 October 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Melfi, M.J.; Umans, S.D. Transients During Line-Starting of Squirrel-Cage Induction Motors. In Proceedings of the 2010 Record of Conference Papers Industry Applications Society 57th Annual Petroleum and Chemical Industry Conference (PCIC), San Antonio, TX, USA, 20–22 September 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Liang, X.; Ilochonwu, O. Induction motor starting in practical industrial applications. IEEE Trans. Ind. App. 2011, 47, 271–280. [Google Scholar] [CrossRef]
- Wan-ting, H.; Ya-Jie, Y.; Si-ming, R.; Hai-yan, Z. A New Starting Method for Asynchronous Induction Motor. In Proceedings of the 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering, Wuhan, China, 20–21 August 2011; pp. 341–344. [Google Scholar] [CrossRef]
- Blair, T.H. 3 Phase AC Motor Starting Methods: An Analysis of Reduced Voltage Starting Characteristics. In Proceedings of the IEEE SoutheastCon 2002 (Cat. No.02CH37283), Columbia, SC, USA, 5–7 April 2002; pp. 181–186. [Google Scholar] [CrossRef]
- VanderMeulen, A.H.; Natali, T.J.; Dionise, T.J.; Paradiso, G.; Ameele, K. Exploring new and conventional starting methods of large medium voltage induction motors on limited kVA sources. IEEE Trans. Ind. App. 2019, 55, 4474–4482. [Google Scholar] [CrossRef]
- Nevelsteen, J.; Aragon, H. Starting of Large Motors—Methods and Economics. IEEE Trans. Ind. App. 1989, 25, 1012–1018. [Google Scholar] [CrossRef]
- Simba, K.G.; Quilumba, F.L.; Granda, N.V. Parameter Estimation of a Three-Phase Induction Motor from Direct Starting Stator Transient Measurements. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Li, X.; Xu, J.; Zhang, H. Research on Torque Ramp Current Limit Starting of Induction Motor Based on Dspic30f6014. In Proceedings of the 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 December 2017; pp. 1627–1630. [Google Scholar] [CrossRef]
- Cholewa, S.; Janson, Z. Modern excitation and voltage control systems for synchronous generators. Wiadomości Elektrotechniczne 2000, 4, 197–201. [Google Scholar]
- Hartmann, W. Advanced Generator Ground Fault Protections. In Proceedings of the 2015 68th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 30 March–2 April 2015; pp. 345–360. [Google Scholar] [CrossRef]
- Gumilar, L.; Nugroho, W.S.; Sholeh, M. Power Quality of Synchronous Generator under Conditions of Starting Large Induction Motors Simultaneously and Sequentially. In Proceedings of the 7th International Conference on Electrical, Electronics and Information Engineering (ICEEIE), Malang, Indonesia, 2 October 2021; pp. 66–71. [Google Scholar] [CrossRef]
- IEEE Std C37.101-2006 (Revision of IEEE Std C37.101-1993); IEEE Guide for Generator Ground Protection. IEEE: Piscataway, NJ, USA, 2007. [CrossRef]
- IEEE Std C37.102-2006 (Revision of IEEE Std C37.102-1995); IEEE Guide for AC Generator Protection. IEEE: Piscataway, NJ, USA, 2007.
- IEEE Tutorial on the Protection of Synchronous Generators, 2nd ed.; Special Publication of the IEEE Power System Relaying Committee (PSRC); IEEE: Piscataway, NJ, USA, 2011.
- IEEE Std 142-2007 (Revision of IEEE Std 142-1991); IEEE Recommended Practice for Grounding of Industrial and Commercial Power Systems. IEEE: Piscataway, NJ, USA, 2007. [CrossRef]
- Bonnet, A.H.; Albers, T. Squirrel-cage rotor options for AC induction motors. IEEE Trans. Ind. App. 2001, 37, 1197–1209. [Google Scholar] [CrossRef]
- Bredthauer, J.; Struck, N. Starting of large medium voltage motors: Design, protection, and safety aspects. IEEE Trans. Ind. App. 1995, 31, 1167–1176. [Google Scholar] [CrossRef]
- Xia, Y.; Hu, Y.; Ai, M.; Liu, J. Temperature calculation of an induction motor in the starting process. IEEE Trans. App. Supercond. 2019, 29, 1–4. [Google Scholar] [CrossRef]
- Varetsky, Y.; Gajdzica, M. Study of short circuit and inrush current impact on the current-limiting reactor operation in an industrial grid. Energies 2023, 16, 811. [Google Scholar] [CrossRef]
- Sobczyk, T.J. Methodological Aspects of Mathematical Modelling of Induction Machines; Scientific Publishing of WNT: Warsaw, Poland, 2004. [Google Scholar]
- Hanzelka, Z. Voltage dips and short interruptions in power supply. Autom. Electrotech. Disturb. 2010, 1, 55–70. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Component | Parameter | Unit | Value |
|---|---|---|---|
| Supply system | Transformer rated voltage, | kV/kV | 110/6 |
| Transformer capacity, | MVA | 31.50 | |
| Short circuit power, | GVA | 3.00 | |
| Cable lines CL1 and CL2 | Rated voltage, | kV | 6.00 |
| Specific resistance, | Ω/km | 0.16 | |
| Specific inductance, | mH/km | 0.34 | |
| Specific capacitance, | µF/km | 0.44 | |
| Section reactor SR | Rated current, | kA | 0.60 |
| Resistance, | Ω | 0.35 | |
| Inductance, | mH | 0.45 | |
| Rated SC current peak, | kA | 32.00 | |
| Section reactors SR1 and SR2 | Rated current, | kA | 1.60 |
| Resistance, | Ω | 0.13 | |
| Inductance, | mH | 0.22 | |
| Rated SC current peak, | kA | 52.00 |
| Component Ratings | Parameter | Unit | Value |
|---|---|---|---|
| Synchronous generators G1, G2 | Rated active power, | MW | 25.00 |
| Rated voltage, | kV | 6.30 | |
| Rated current, | kA | 2.25 | |
| Rated speed, | r.p.m. | 3000.00 | |
| Power factor, cosφ | - | 0.80 | |
| Stator resistance, | mΩ | 5.22 | |
| Subtransient reactance, | % | 14.30 | |
| Transient reactance, | % | 24.00 | |
| Synchronous reactance, | % | 245.00 | |
| Winding time constant, | s | 1.20 | |
| Mechanical time constant, | s | 9.32 | |
| Inertia moment, | T·m2 | 1.35 | |
| Excitation unit | Rated power, | kW | 150.00 |
| Rated voltage, | V | 250.00 | |
| Rated current, | A | 600.00 |
| Parameter | Accuracy and Range of Regulation | Unit | Value |
|---|---|---|---|
| Voltage limiter | ±0.5 = = | % kV V | - 5.35–6.93 400 |
| Current limiter | ±1.0 = ( = | % A A | - 420–660 660 |
| Protection Type | Unit | Setting Value |
|---|---|---|
| Overcurrent protection | Ir [kA] tmax [s] | 1.20In 2.00 |
| Differential protection | Ir [kA] tmax [s] | 0.20I 0.02 |
| Overvoltage protection | Ur [kV] tmax [s] | 1.23U 2.00 |
| Undervoltage protection | Ur [kV] tmax [s] | 0.83U 2.00 |
| Frequency protection | Ur [kV] fr [Hz] tmax [s] | 0.40U 0.95f 10.00 |
| Impedance | Ir [kA] Zr [Ω] tmax [s] | 0.10In 6.00 3.00 |
| Stator ground fault protection | Ir [kA] | 1.20In |
| Unbalance protection | Ir [kA] tmin [s] tmax [s] | 0.05In 10.00 300.00 |
| Reverse power | Pr [kW] | 0.01Pn |
| Parameter | Unit | Value |
|---|---|---|
| Rated power, | MW | 2.0 |
| Rated voltage, | kV | 6.0 |
| Rated current, | A | 240.0 |
| Starting coefficient, | - | 6.5 |
| Rated speed, | r.p.m. | 2975.0 |
| Efficiency, | % | 95.0 |
| Inertia moment, | kg·m2 | 38.5 |
| Power factor, | - | 0.85 |
| The Measurement Point | U [kV] | |
|---|---|---|
| Before Starting | During Starting | |
| Synchronous generator G1 | 6.28 | 5.02 |
| Synchronous generator G2 | 6.25 | 6.15 |
| 6 kV switchboard | 6.22 | 4.96 |
| Time Delay of Relay Protection | Protection Relay Type | Protection Relay Event |
|---|---|---|
| ∆t [s]: 00:00–01:00 | OCP | activation |
| ELP | activation | |
| UCP | activation | |
| ∆t [s]: 01:00–02:00 | OCP | activation |
| ELP | activation | |
| UCP | activation | |
| UVP | activation | |
| SFP | activation | |
| ∆t [s]: > 02:00 | OCP | action |
| UVP | action | |
| ELP | action | |
| UCP | activation | |
| SFP | activation | |
| GCB | switching off the GCB | |
| ECB | switching off the ECB | |
| TV | closing the TV |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Varetsky, Y.; Gajdzica, M. Power Compatibility of Induction Motors in Industrial Grids Containing Synchronous Generators. Energies 2024, 17, 1066. https://doi.org/10.3390/en17051066
Varetsky Y, Gajdzica M. Power Compatibility of Induction Motors in Industrial Grids Containing Synchronous Generators. Energies. 2024; 17(5):1066. https://doi.org/10.3390/en17051066
Chicago/Turabian StyleVaretsky, Yuriy, and Michal Gajdzica. 2024. "Power Compatibility of Induction Motors in Industrial Grids Containing Synchronous Generators" Energies 17, no. 5: 1066. https://doi.org/10.3390/en17051066
APA StyleVaretsky, Y., & Gajdzica, M. (2024). Power Compatibility of Induction Motors in Industrial Grids Containing Synchronous Generators. Energies, 17(5), 1066. https://doi.org/10.3390/en17051066