
Remaining Useful Life Prediction of Electromagnetic Release Based on Whale Optimization Algorithm—Particle Filtering

Abstract
1. Introduction
2. Theoretical Foundation
2.1. Particle Filtering
2.2. Whale Optimisation Algorithm
- Initialization: determine the number of whale groups N, the maximum number of iterations m, and assign an initial position to each whale before generating the initial population.
- Search: Each whale explores the environment according to a set of rules. This process can be used to simulate whales encircling, chasing, and attacking their prey. When a whale moves, the fitness value for the current whale population is calculated. If the current fitness value is higher than the previous fitness value, it is chosen as the best solution.
- Update: The algorithm will update all whale positions and repeat the previous steps after all whales have completed moving and evaluating. Up until the predetermined accuracy or the maximum number of iterations are reached, several iterations are carried out.
3. Optimizing Particle Filtering Based on the Whale Optimization Algorithm
3.1. Design of the Fitness Function
3.2. Adaptive Mutation Mechanisms
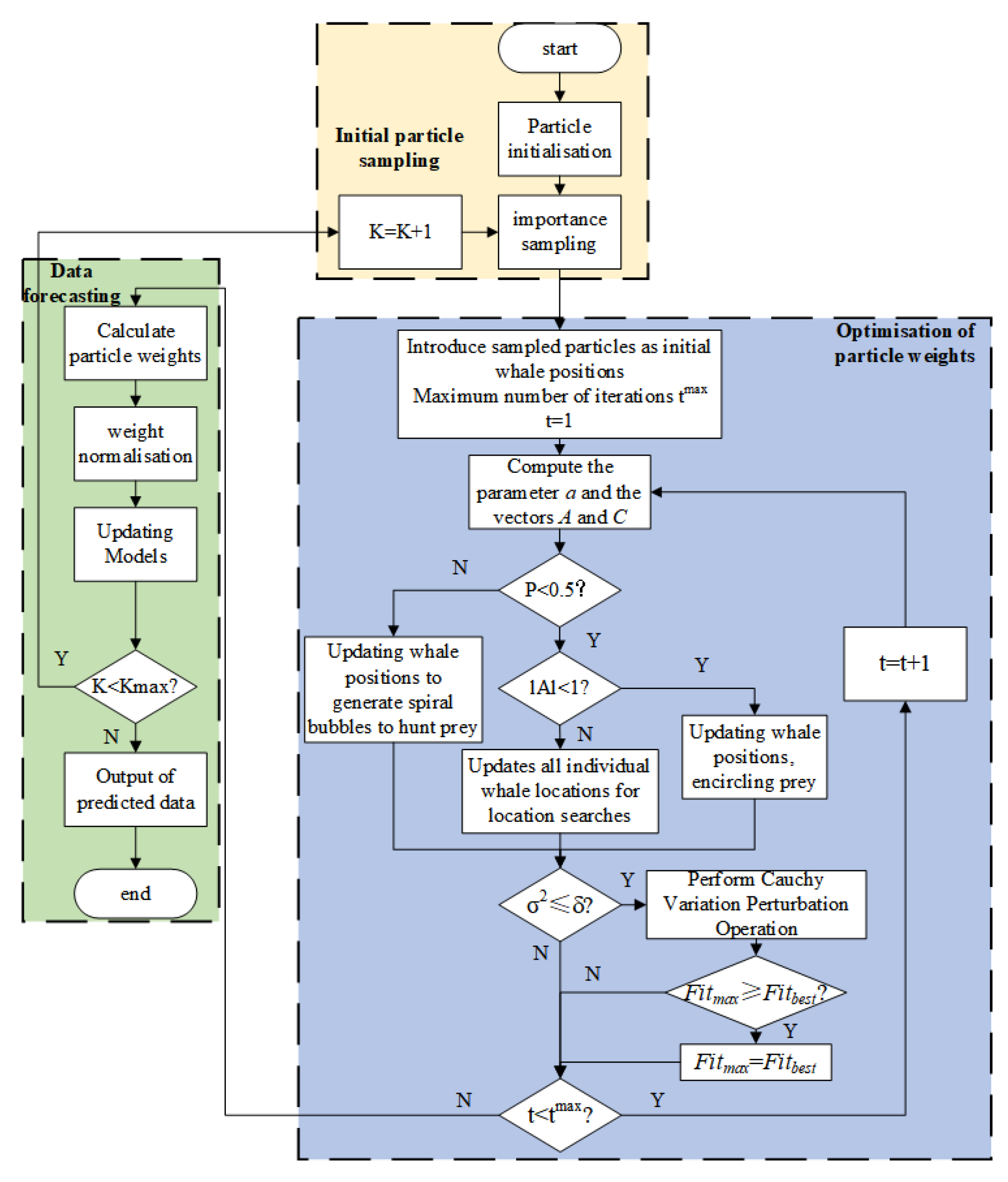
3.3. Algorithmic Step
4. Experimental Verification
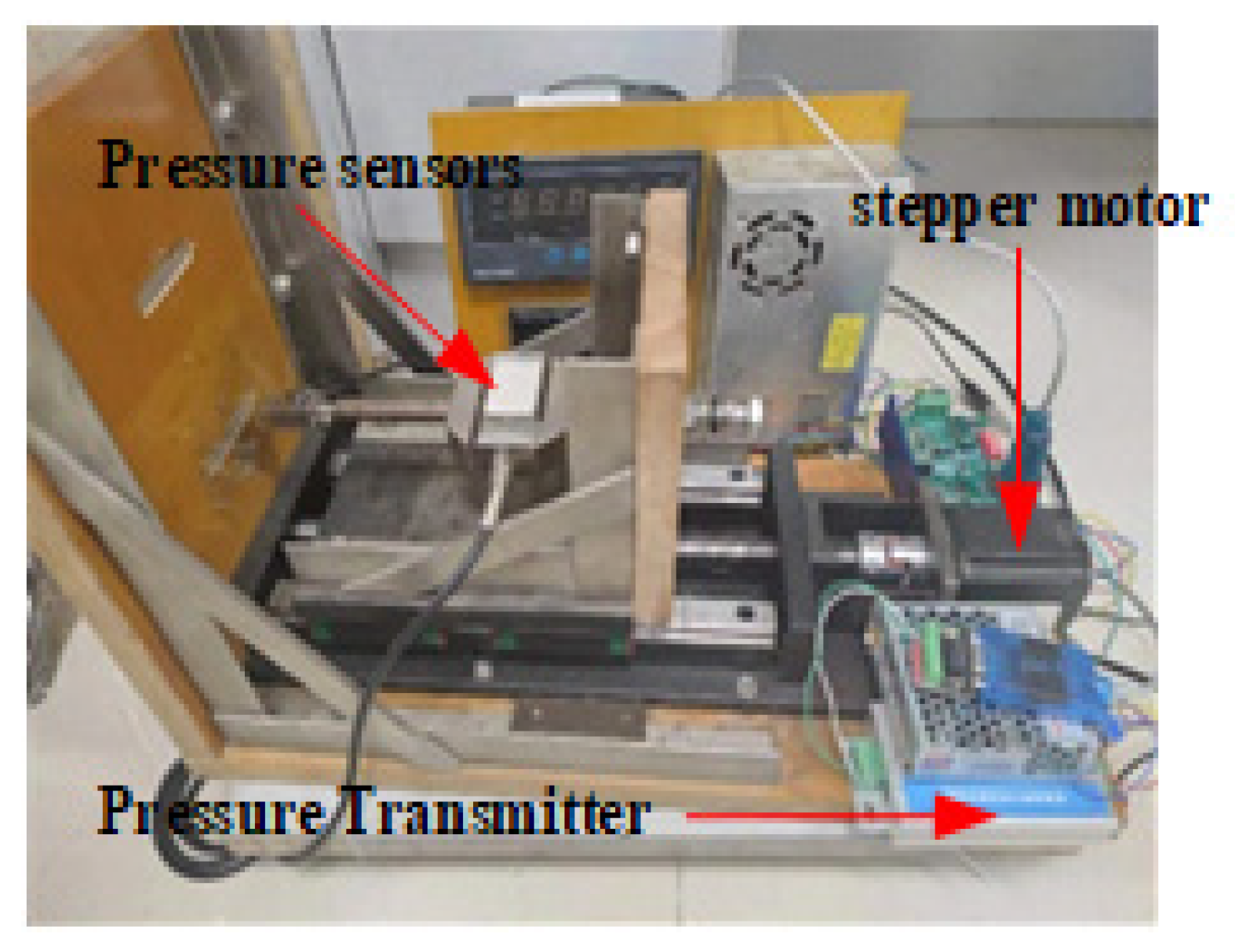
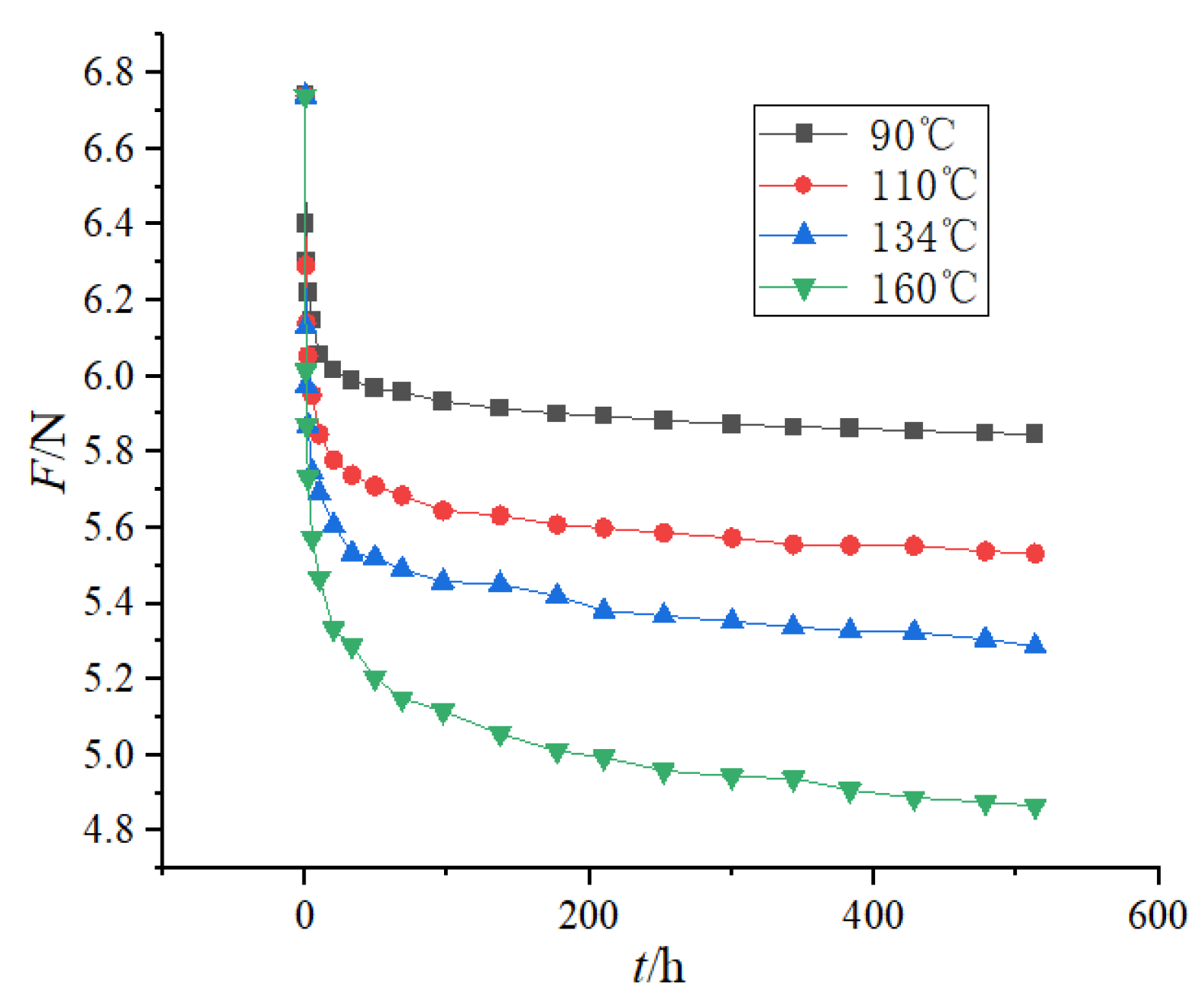
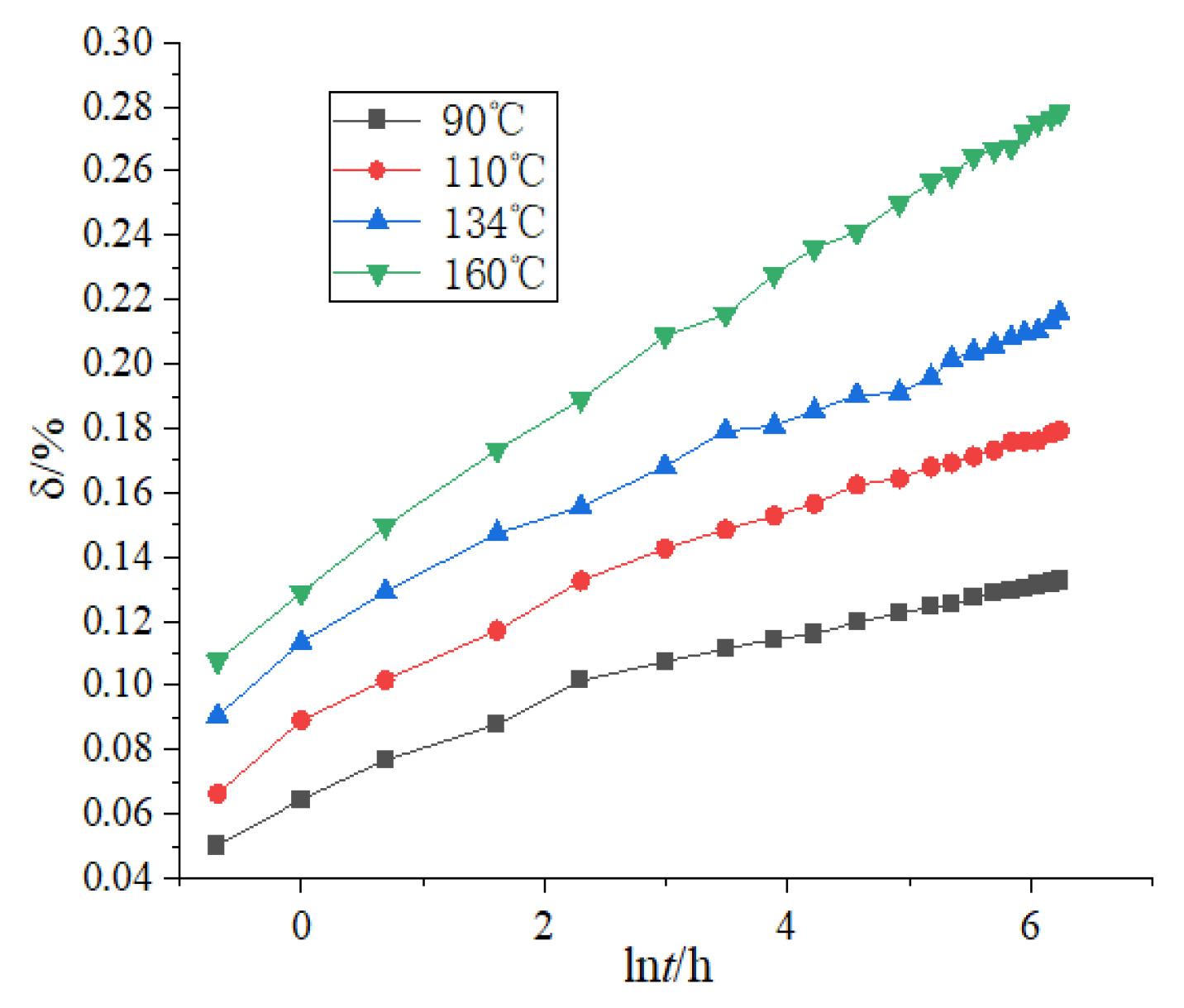
4.1. Experimental Programme and Analysis of Experimental Data
4.2. Remaining Useful Life Prediction
5. Conclusions
- (1)
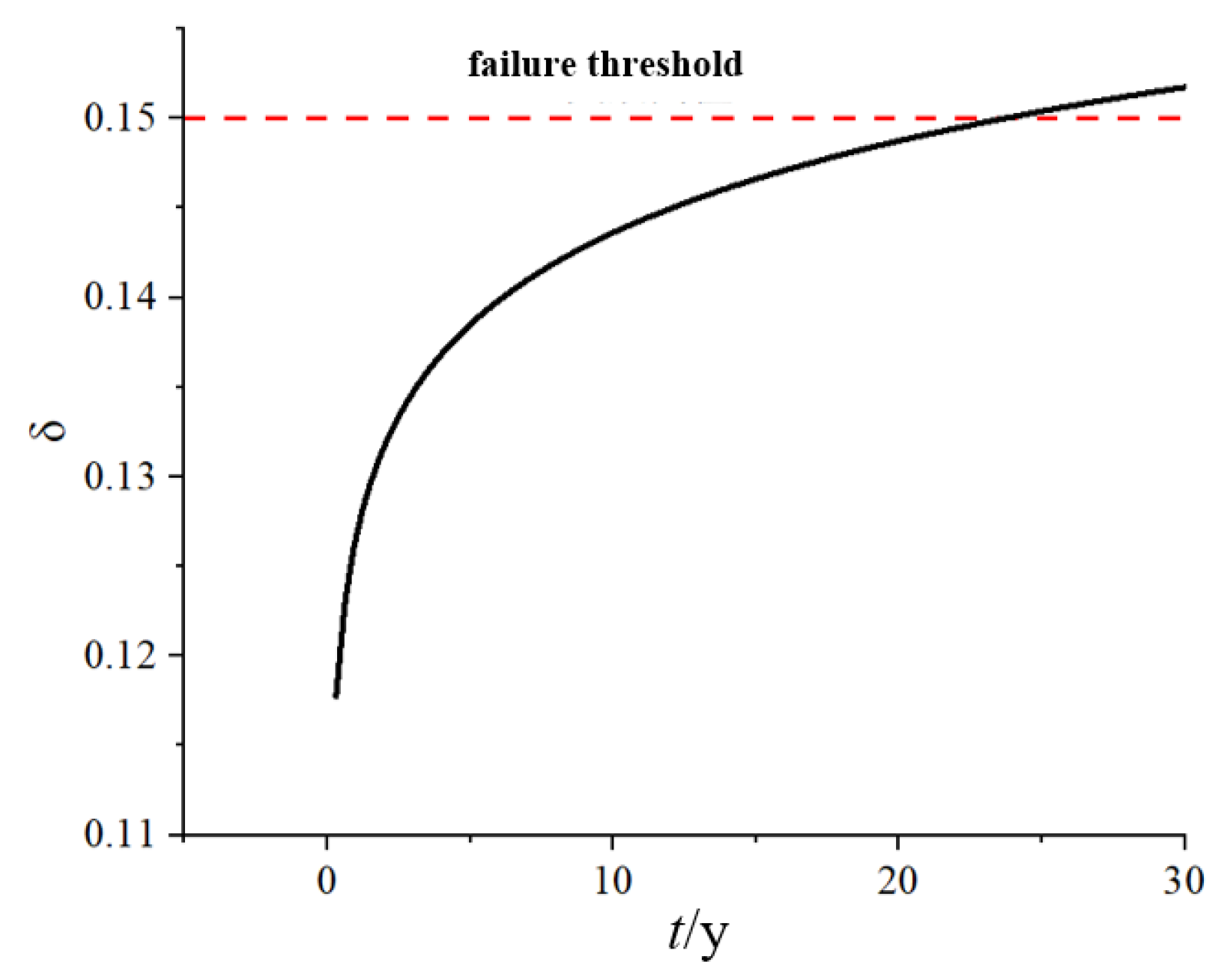
- This paper examines the primary causes of electromagnetic release degradation, identifies the rate of loss of the spring reaction force and the striker counterforce as the characteristic quantity of degradation, chooses temperature as the accelerating stress to perform an accelerated life test on the electromagnetic release inside the low-voltage DC circuit breaker, obtains the degradation curves of the electromagnetic release reaction force under various accelerating temperatures, and deduces them using the Arrhenius equation. It then combines these curves with its failure conditions to obtain the full-life data of electromagnetic release under normal operation and offers theoretical information for estimating the electromagnetic release’s remaining useful life.
- (2)
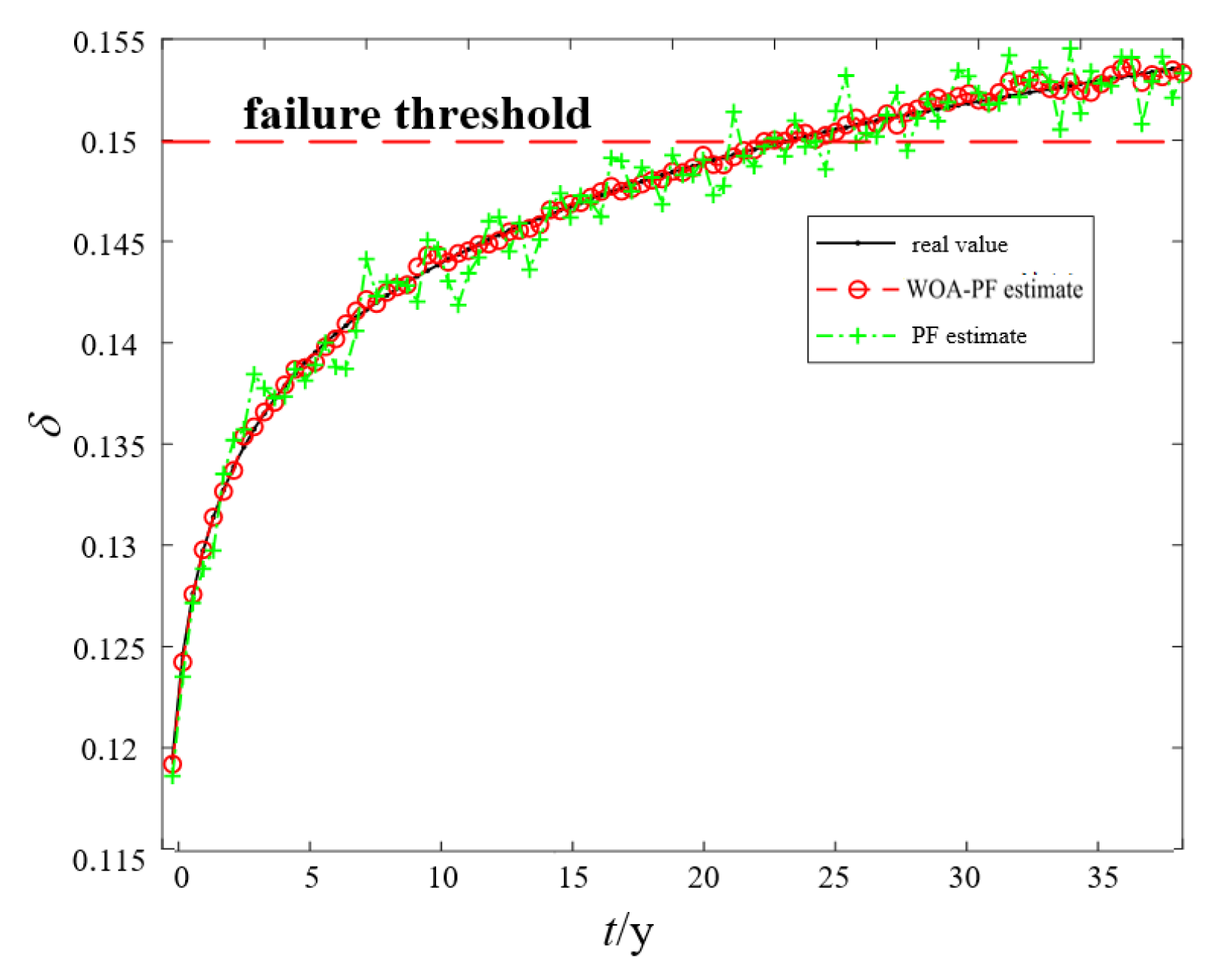
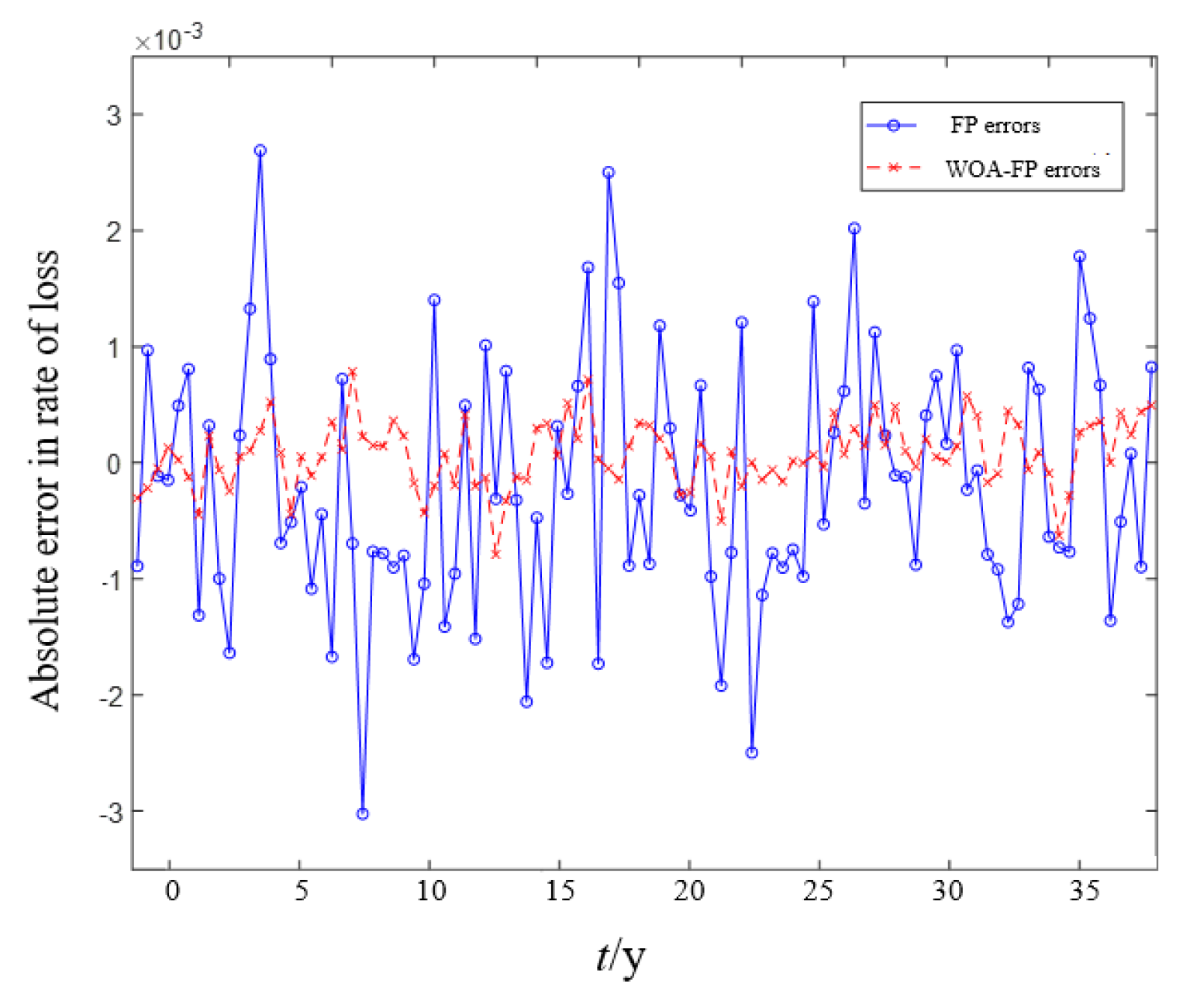
- For the problem of particle degradation of traditional particle filter, an improved method of remaining useful life prediction based on whale optimization algorithm is proposed to replace the traditional particle filter resampling process with whale optimization algorithm, so that the particle weights in the particle set are more reasonably allocated. The WOA-PF algorithm and the PF algorithm are used to predict the remaining useful life of an electromagnetic release, and the experimental results show that the WOA-PF algorithm has a higher prediction accuracy than the traditional PF algorithm, and the error accuracy is improved by 2.65%, making it more practical and reliable in predicting the remaining useful life of an electromagnetic release.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yan, Y.; Sun, Y.; Guo, W.; Hou, K. Modular Multilevel Solid State Transformer with DC Short Circuit Fault Blocking Capability with Arm Integrated Submodule. Power Syst. Technol. 2023, 43, 1–15. [Google Scholar]
- Wei, S.; Yu, C.; Chao, S.; Wang, W.; Xie, Y.; Fang, T. Multi-port Commutation-based Hybrid DC Circuit Breaker with Low Conduction Loss Considering Bus Fault. Autom. Electr. Power Syst. 2022, 46, 140–149. [Google Scholar] [CrossRef]
- Wang, Z.; Gao, Z.; Zhang, J. Protection for Active Distribution Network Considering Short-circuit and Broken-line Faults. Autom. Electr. Power Syst. 2021, 45, 133–141. [Google Scholar] [CrossRef]
- Dong, B.; Tao, L.; Li, Z.; Zhang, R.; Xu, X.; Wen, T. A Gas Gap Switch Scheme for Commutation Branch of DC Circuit Breakers and Its Induced Breakdown Characteristics. High Volt. Eng. 2022, 48, 4863–4872. [Google Scholar] [CrossRef]
- Li, B.; Li, P.; Wen, W.; Liu, H. Performance Analysis and Resonant Commutation Method of Mechanical DC Circuit Breaker. Trans. China Electrotech. Soc. 2022, 37, 2139–2149. [Google Scholar] [CrossRef]
- Zhao, C.; Li, K.; Hu, B.; Ma, D.; Zhao, W.; Zhang, G. Residual Electrical Life Prediction of Low-voltage Circuit Breakers Under Varied Stress. Proc. CSEE 2022, 42, 8004–8016. [Google Scholar] [CrossRef]
- Sun, S.; Tang, Y.; Wang, J.; Wen, Z.; Gao, H. Life Prediction of Operating Mechanism for Circuit Breaker Based on Multiple Signal Feature Fusion. High Volt. Eng. 2022, 48, 4455–4468. [Google Scholar] [CrossRef]
- Liu, G.; Li, X.; Wang, Z.; Yue, C. Remaining Life Prediction of Electronic Residual Current Circuit Breaker Based on Wiener Process. Trans. China Electrotech. Soc. 2022, 37, 528–536. [Google Scholar] [CrossRef]
- Liu, H.; Lin, Y.; Chen, Y.; Zhou, E.; Peng, B. A study on resampling strategy of intelligent particle filter based on genetic algorithm. J. Electron. Inf. Technol. 2021, 43, 3459–3466. [Google Scholar] [CrossRef]
- Tian, M.; Bo, Y.; Chen, Z.; Wu, P.; Zhao, G. Firefly algorithm intelligence optimized particle filter. Acta Autom. Sin. 2016, 42, 89. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, S.; Fernandez, C.; Yu, C.; Fan, Y.; Cao, W.; Chen, X. Improved gray wolf particle filtering and high-fidelity second-order autoregressive equivalent modeling for intelligent state of charge prediction of lithium-ion batteries. Int. J. Energy Res. 2021, 45, 19203–19214. [Google Scholar] [CrossRef]
- Han, X.; Wu, B.; Wang, D. Firefly Algorithm with Disturbance-Factor-Based Particle Filter for Seismic Random Noise Attenuation. IEEE Geosci. Remote. Sens. Lett. 2020, 17, 1268–1272. [Google Scholar] [CrossRef]
- Gong, Z.; Gao, G.; Wang, M. An Adaptive Particle Filter for Target Tracking Based on Double Space-Resampling. IEEE Access 2021, 9, 91053–91061. [Google Scholar] [CrossRef]
- Zhu, F.; Fu, J.-Q. A Novel State-of-Health Estimation for Lithium-Ion Battery via Unscented Kalman Filter and Improved Unscented Particle Filter. IEEE Sens. J. 2021, 21, 25449–25456. [Google Scholar] [CrossRef]
- Feng, W.; Deng, B. Global convergence analysis and research on parameter selection of whale optimization algorithm. Control. Theory Appl. 2021, 38, 641–651. [Google Scholar] [CrossRef]
- Liang, Z.; Han, Q.; Zhang, T.; Tang, Y.; Jiang, J.; Cheng, Z. Nonlinearity Compensation of Magneto-Optic Fiber Current Sensors Based on WOA-BP Neural Network. IEEE Sensors J. 2022, 22, 19378–19383. [Google Scholar] [CrossRef]
- Tsakonas, E.E.; Sidiropoulos, N.D.; Swami, A. Optimal Particle Filters for Tracking a Time-Varying Harmonic or Chirp Signal. IEEE Trans. Signal Process. 2008, 56, 4598–4610. [Google Scholar] [CrossRef]
- Yu, Z.; Wang, Y.; Yang, P.; Zhao, T. RUL prediction of cable retracting vehicle battery based on improved particle filter. Coal Sci. Technol. 2022, 50, 289–296. [Google Scholar] [CrossRef]
- GB/T 14048.2—2020; Low-Voltage Switchgear and Controlgear—Part 2: Circuit-Breakers. State Administration of Market Supervision and Administration of the People’s Republic of China, Standardization Administration of the People’s Republic of China. Standards Press of China: Beijing, China, 2020. (In Chinese)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Temperature/°C | Correlation Coefficient r | ||
|---|---|---|---|
| 90 | 0.01083 | 0.06832 | 0.96630 |
| 110 | 0.01484 | 0.09066 | 0.97549 |
| 134 | 0.01621 | 0.11483 | 0.98331 |
| 160 | 0.02389 | 0.13154 | 0.99643 |
| Predictive Algorithms | ||||
|---|---|---|---|---|
| WOA-PF | 23.699 | 22.855 | 0.844 | 3.56% |
| PF | 23.699 | 22.227 | 1.472 | 6.21% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, X.; Zhang, Z.; Wei, J. Remaining Useful Life Prediction of Electromagnetic Release Based on Whale Optimization Algorithm—Particle Filtering. Energies 2024, 17, 670. https://doi.org/10.3390/en17030670
Su X, Zhang Z, Wei J. Remaining Useful Life Prediction of Electromagnetic Release Based on Whale Optimization Algorithm—Particle Filtering. Energies. 2024; 17(3):670. https://doi.org/10.3390/en17030670
Chicago/Turabian StyleSu, Xiuping, Zhilin Zhang, and Jiaxin Wei. 2024. "Remaining Useful Life Prediction of Electromagnetic Release Based on Whale Optimization Algorithm—Particle Filtering" Energies 17, no. 3: 670. https://doi.org/10.3390/en17030670
APA StyleSu, X., Zhang, Z., & Wei, J. (2024). Remaining Useful Life Prediction of Electromagnetic Release Based on Whale Optimization Algorithm—Particle Filtering. Energies, 17(3), 670. https://doi.org/10.3390/en17030670