
EMS for Active and Reactive Power Management in a Polygeneration Microgrid Feeding a PED



Abstract
1. Introduction
Fundamentals, Evolution, and Classification of Energy Management Systems
2. PED and ALPGRIDS Project
2.1. Positive Energy Districts (PEDs)
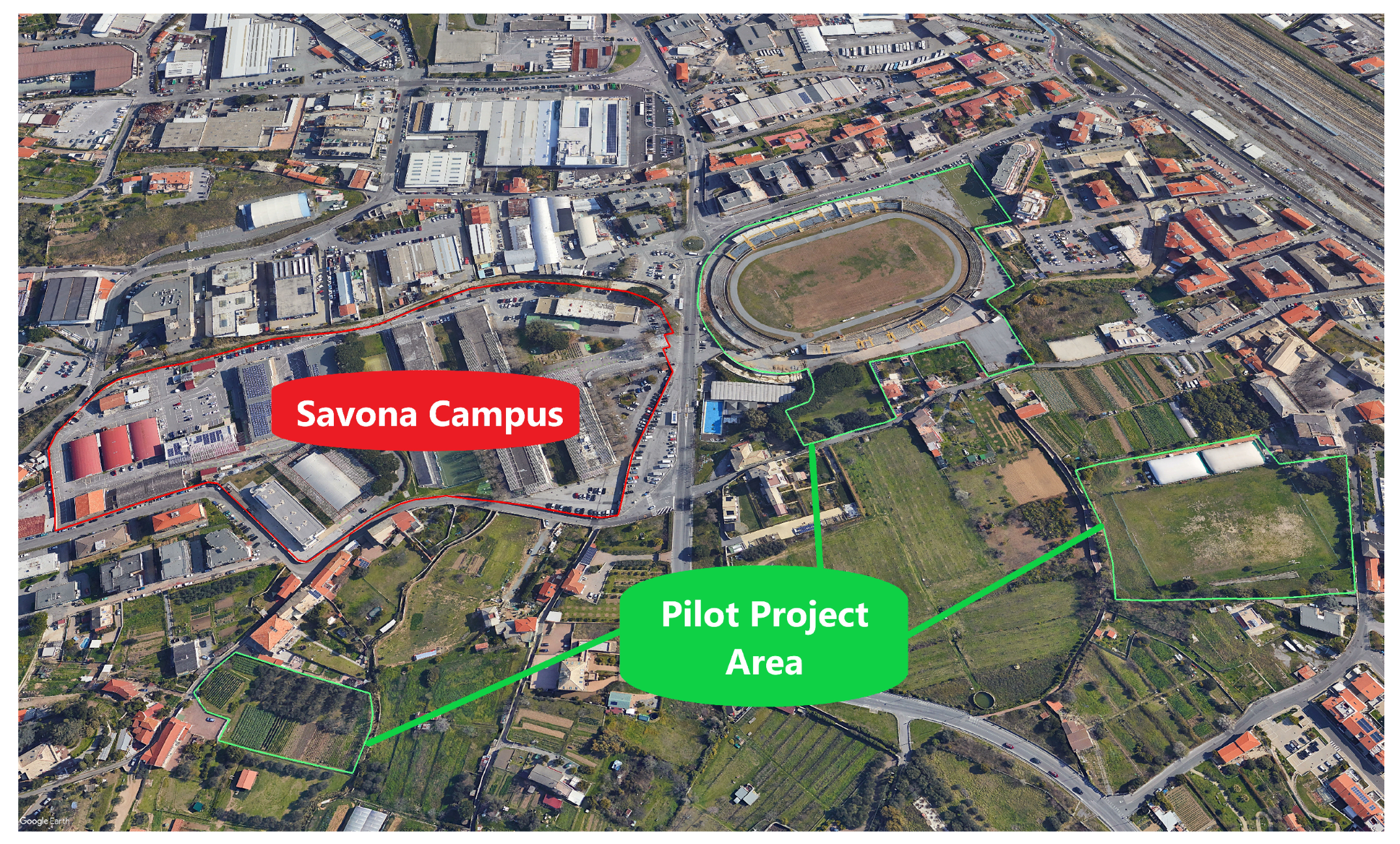
2.2. ALPGRIDS Project
- The main football stadium, an outdoor sports area, and the swimming pool;
- Commercial activity areas;
- University labs, research centers, and student accommodations;
- Social housing.
3. EMS: Application and Mathematical Model
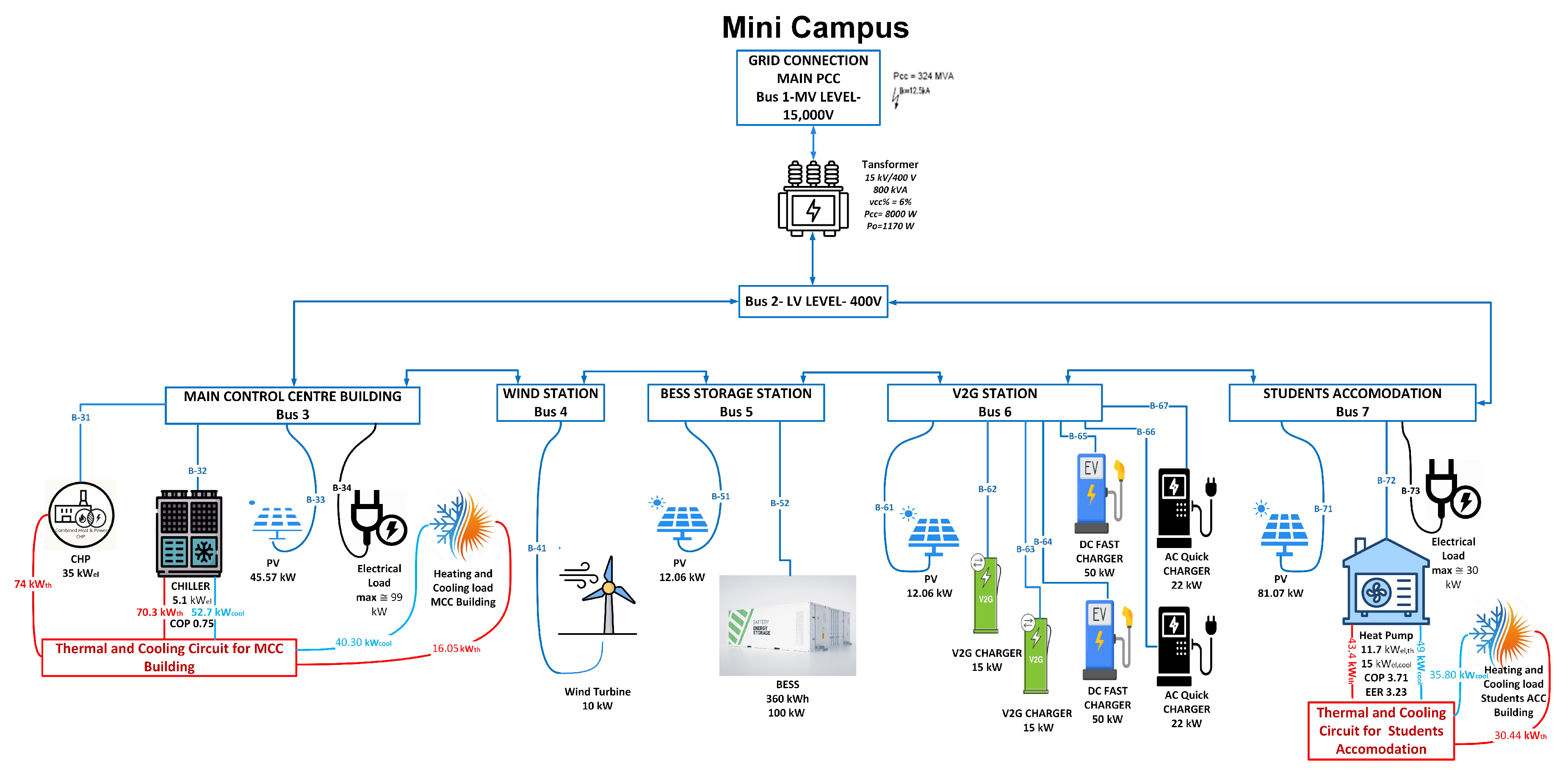
3.1. Structure and Elements of the Microgrid
3.2. Mathematical Model
3.2.1. Distributed Generation Models
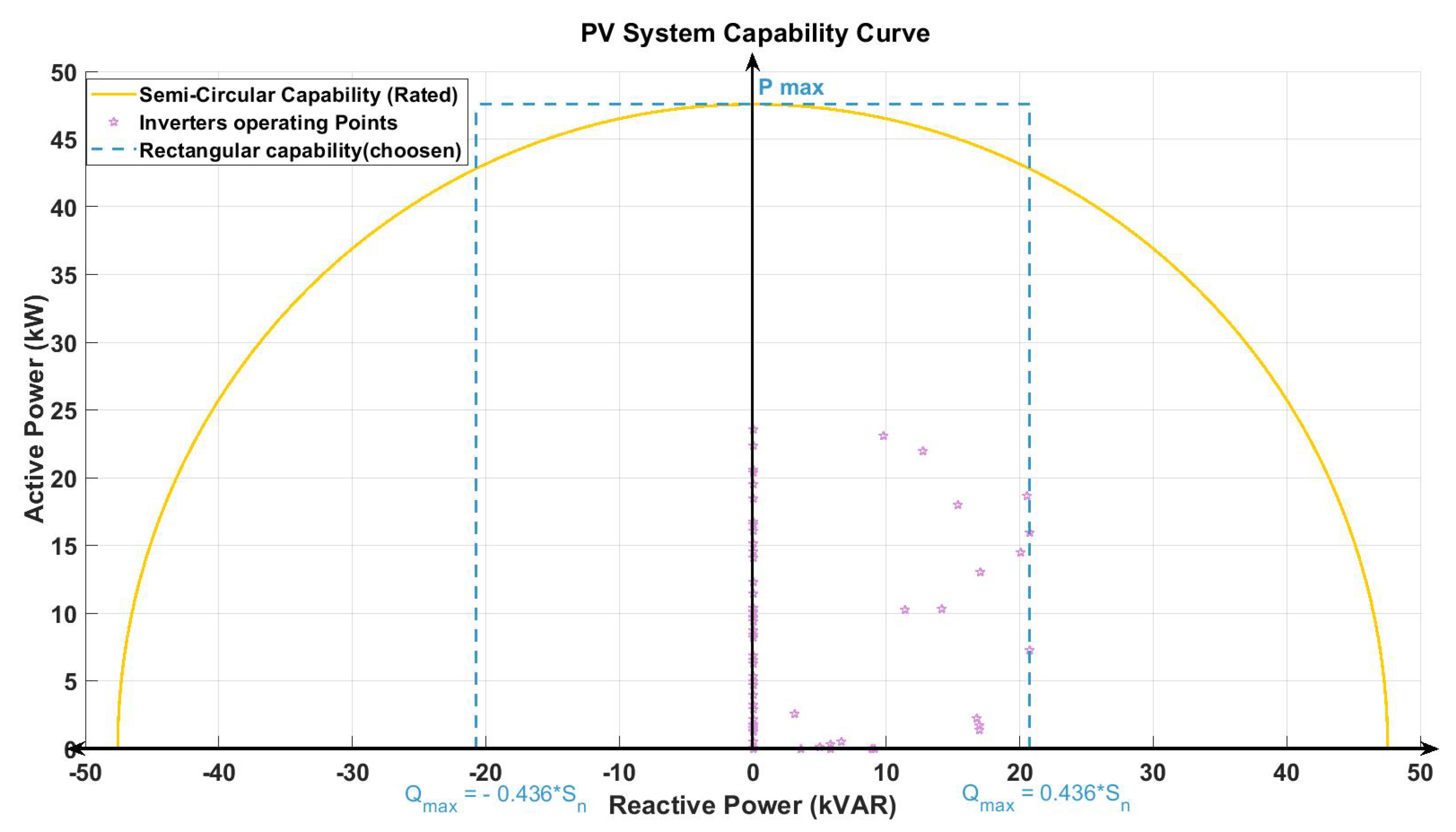
- Renewable energy source (RES) model: In our model, we consider the contribution of the RES to the microgrid system. The active power output of the RES at different buses is denoted as in kilowatts [kW] as in (1), where b denotes the generic bus, r denotes the generic source, and t denotes the time interval. Additionally, the active power curtailment of the RES is represented by in [kW] as in (2), reflecting any reduction in the output due to operational or grid constraints. represents the available power of the RES as in (3). The Equation (4) limits the maximum power of the RES according to (CEI 0-16 page-117). The main constraints for RESs are as follows:For the reactive power, in (5) represents the inductive reactive power injected into the microgrid by the RES in [kvar], while in (6) represents the inductive reactive power absorbed by the RES in [kvar]. in (5) and (6) limits the inverter operating points, considering a rectangular capability curve. Binary variables in (7) and take the value of 1 when the RES injects or absorbs reactive power, respectively. The reactive power constraints are given as follows:These variables play a crucial role in capturing the dynamic behaviour and impact of the RES on the microgrid, enabling an analysis of active and reactive power interactions, as well as the ability to curtail active power output when necessary.
- CHP Model: The electric power produced is subject to the following constraints:These constraints in (8) and (9) limit the power between a lower threshold () and an upper one (). Specifically, represents the minimum technical part-load of the microturbine, typically advised by manufacturers to be above 30–50% of the nominal electrical power to maintain efficiency. Regarding the maximum power , it depends on the time instant t since the maximum electric power and efficiency are influenced by environmental (temperature, pressure, and humidity) and installation (altitude) conditions as in (A1) in Appendix A. The thermal power produced by the single unit at time t can either be positive or equal to zero and is correlated with the electric power through a linear function, as in (10), describing the partial load behaviour of the microturbine and was calculated as in (A2):The primary power of the microturbine at time t is linearly related to the electric power produced through Equation (11):where and are constant coefficients and is the maximum primary power which is calculated as in (A3). Finally, in Equation (12), thermal balance is defined as follows:where (thermal power used for heating purposes) and (thermal power provided to the absorption chiller) can assume positive values or be equal to zero.
3.2.2. BESS Model
3.2.3. Grid Model
3.2.4. EV and Wall Box Model
3.2.5. Heating and Cooling System Modeling
- Heat Pump Model: The thermal power produced by the HP is denoted as , while the corresponding electrical power consumed to generate the required thermal power is represented as as in (61). Additionally, the cooling power (63) produced by the HP is captured by , with the associated electrical power consumption denoted as . Constraints (62) and (64) denote the cooling and heating power of the heat pump. Binary variables and in (65) take the value of 1 if the HP is in the heating or cooling mode, respectively. These variables play a crucial role in modeling the operational states of the HP system, allowing for a comprehensive analysis of its thermal and electrical performance. The key constraints for the heat pump are as follows:
- Absorption Chiller Model: As shown in (66), the thermal power required by the chiller is denoted as . The corresponding electrical power consumed by the chiller, as in (68), generates the necessary cooling power, and is represented by . Additionally, the cooling power produced by the chiller in (69) is denoted by . These variables are essential in characterizing the operational dynamics of the chiller system, providing insights into the interplay between thermal and electrical components. The main constraints for the chiller system are as follows:Equation (69) defines the relation between the heating power required by the chiller and the produced cooling power; the relation is properly linearized.
- Thermal balance:Equation (70) expresses the thermal balance, ensuring that the sum of the thermal power produced by the CHP system for heating () and the thermal power produced by the heat pump (HP) () is used to satisfy the thermal load () in bus b at time t. The parameter is a factor used to consider heating loss.
- Cooling Balance:Equation (71) represents the cooling balance, ensuring that the sum of cooling power produced by the chiller () and the cooling power produced by the heat pump (HP) () allows satisfying the cooling load () in bus b at time t. The parameter is a factor that is used to consider cooling losses.
- Trigeneration Balance:Equation (72) represents the trigeneration balance, linking the thermal power produced by the CHP and sent to the chiller () and the thermal power consumed by the chiller () in bus b at time t. The parameter is introduced to consider the losses of the chiller in trigeneration, considering the heat being supplied by CHP through the pipes.
3.2.6. Active and Reactive Power Balance
- Active power balance
- Reactive power balance
3.2.7. Load Flow Constraints
3.2.8. Objective Function: Minimization of Operating Costs
- The net cost associated with buying and selling active power at each time interval.
- The net cost related to absorbing and injecting reactive power at each time interval.
- The cost of fuel consumption for CHP.
- The costs associated with curtailing power from PV and wind sources at each time interval.
- The revenue from selling power to EVs by charging them with different charging points, including AC, DC, and V2G systems.
- The cost associated with remunerating the discharging of V2G technology.
4. Input Data: Acquisition and Processing
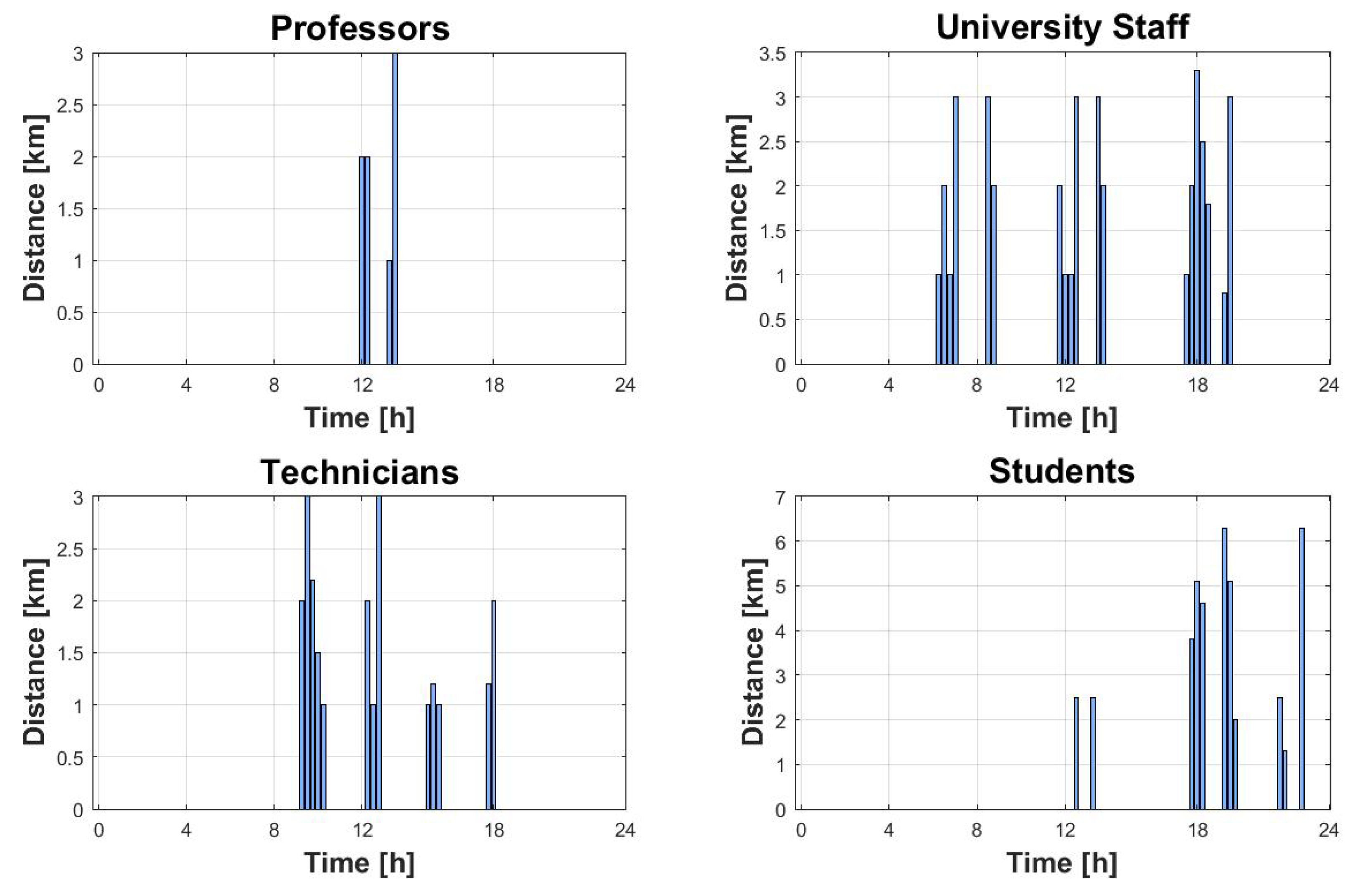
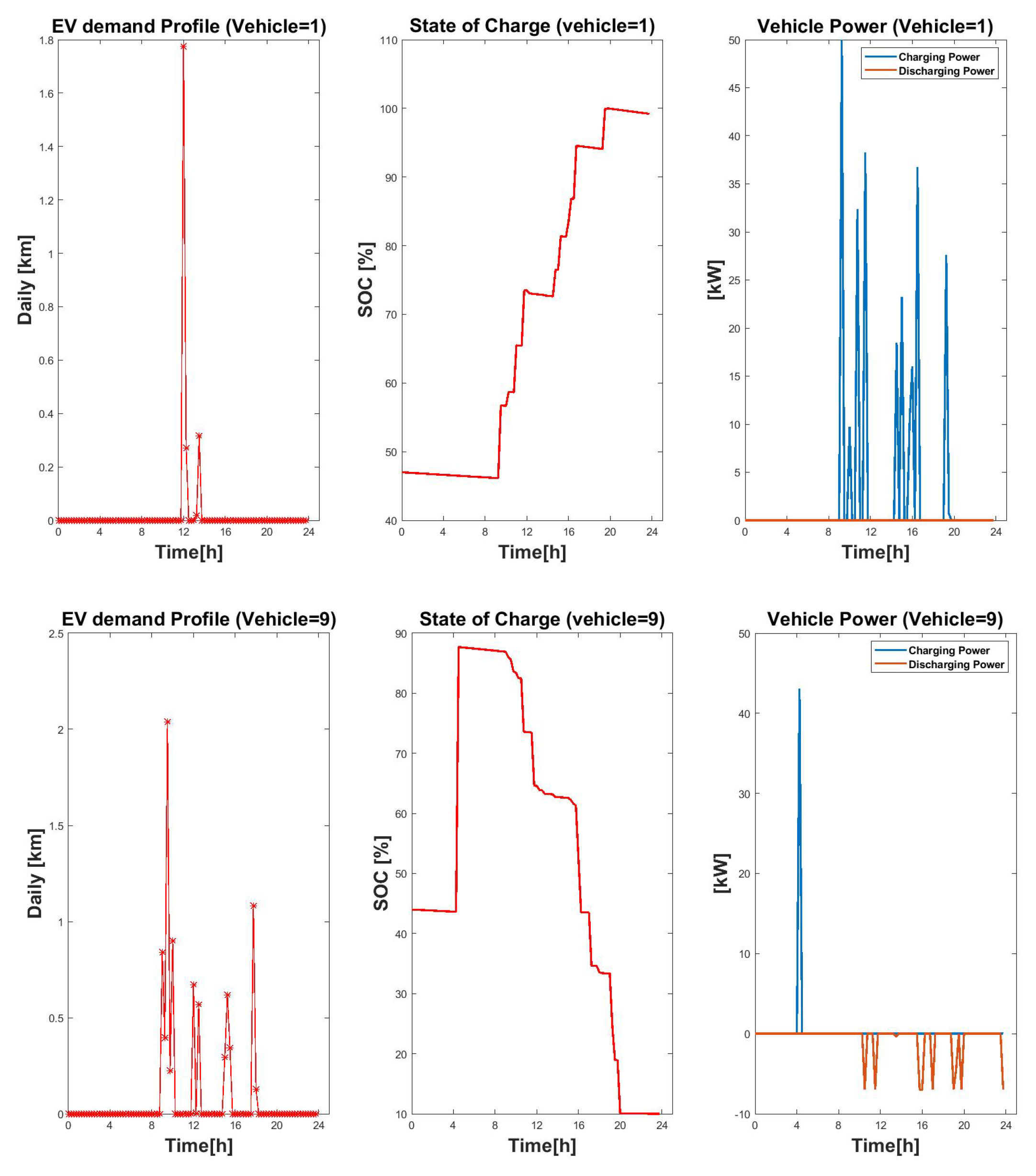
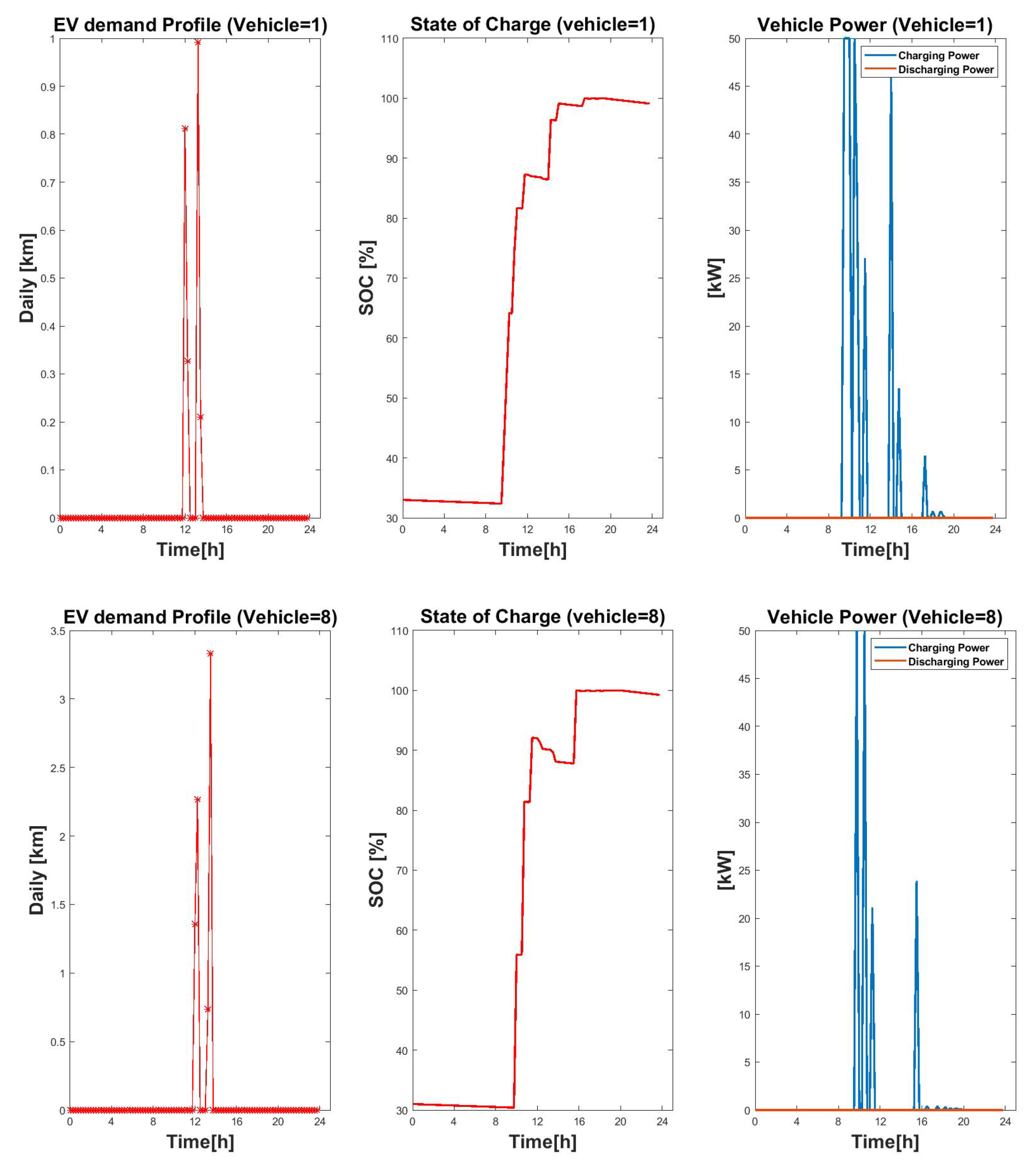
4.1. Electric Mobility
4.2. Specifications of Charging Stations
4.3. Different Technologies Size Estimation
4.4. Load Profile Estimation
5. Results
5.1. Analysis of Different Cases (Typical Days)
5.1.1. Typical Summer Day
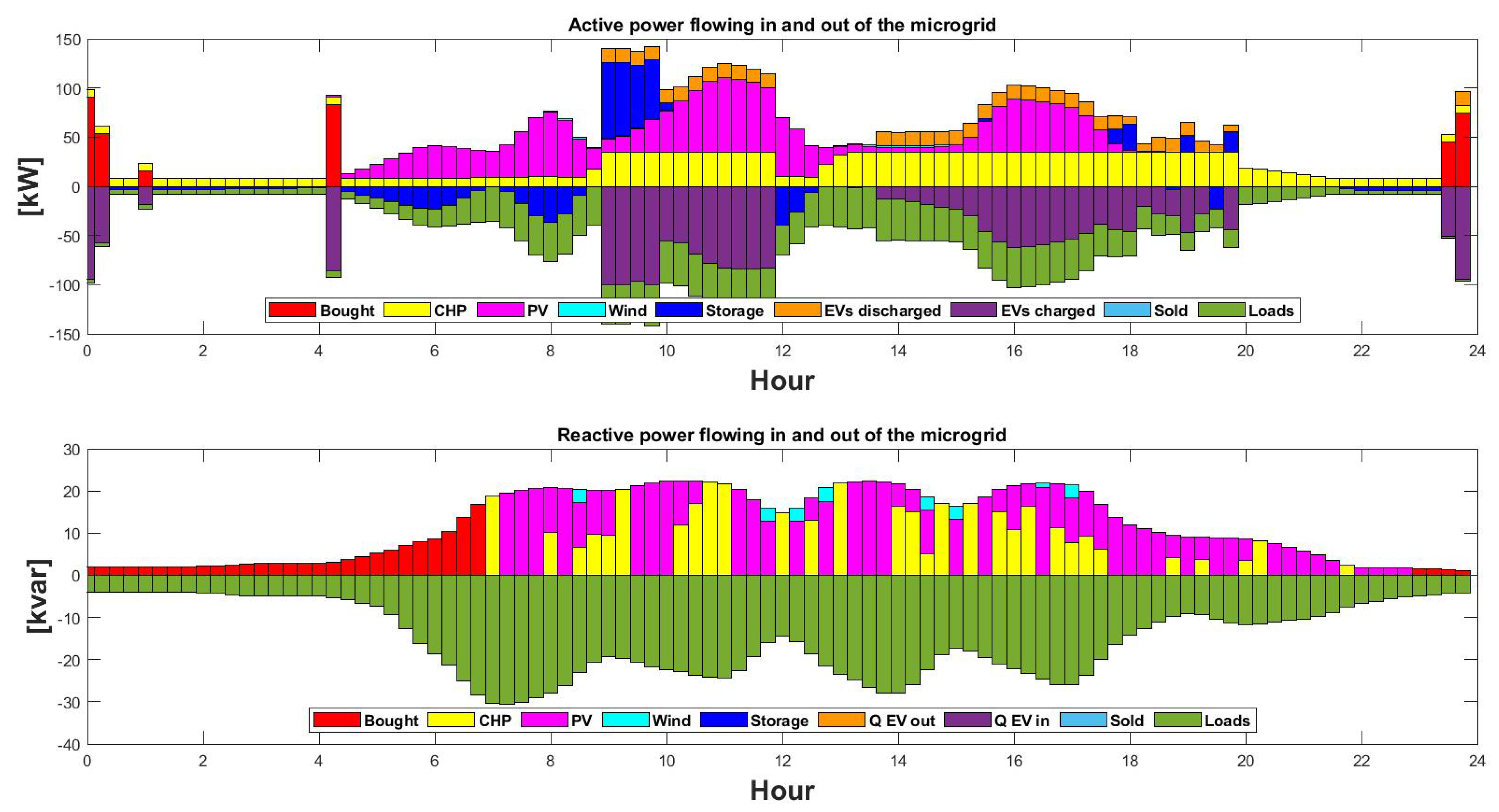
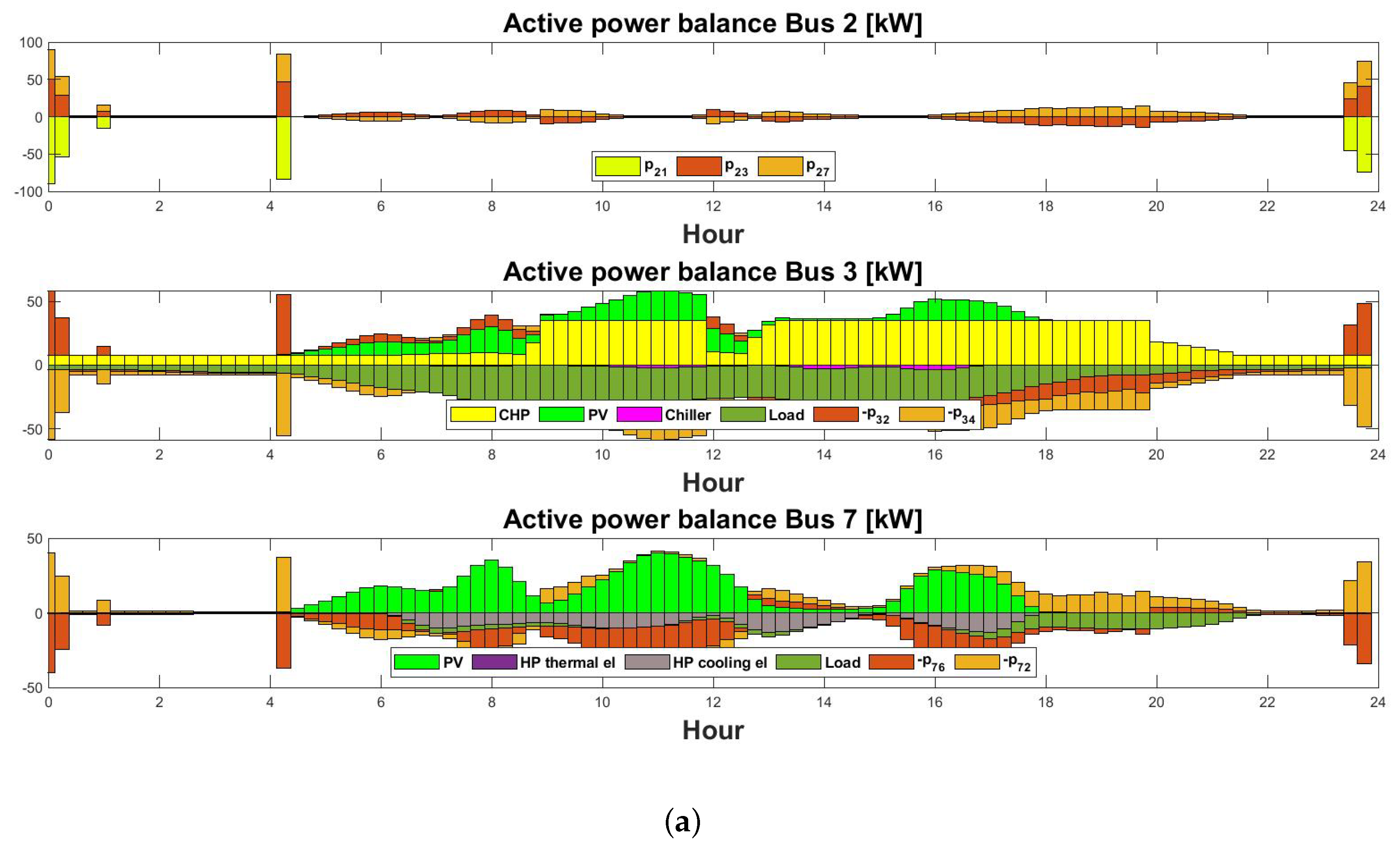
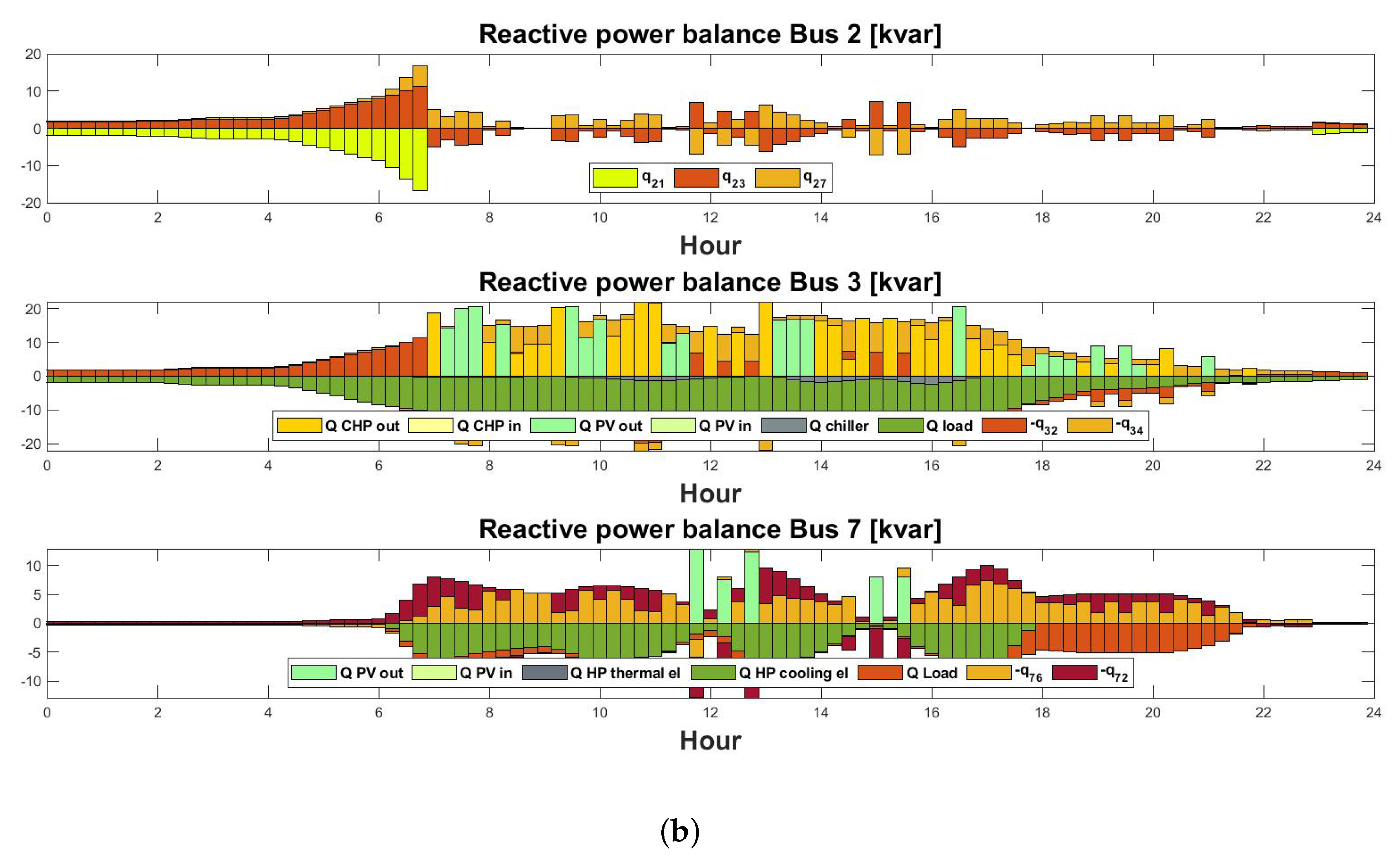
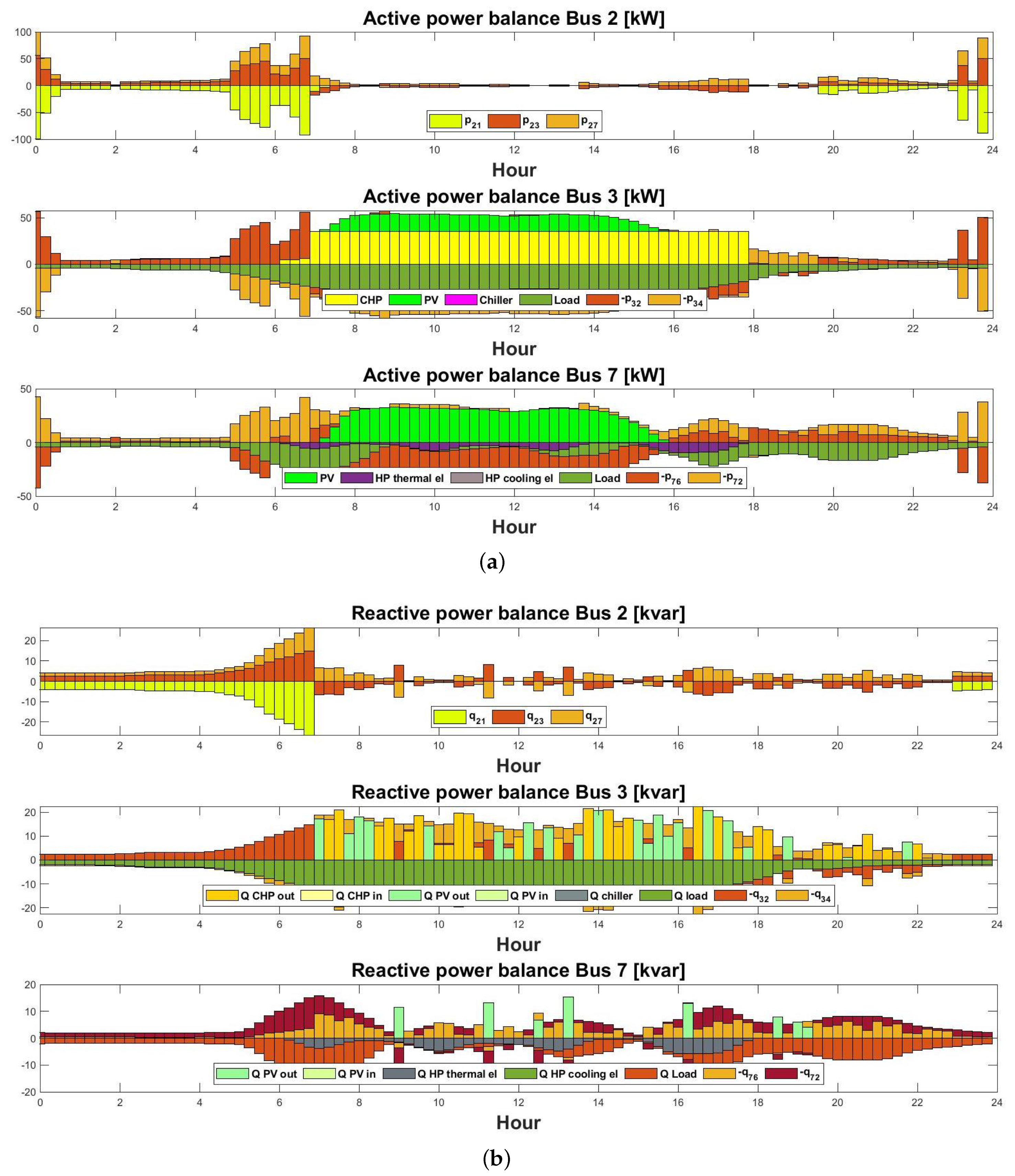
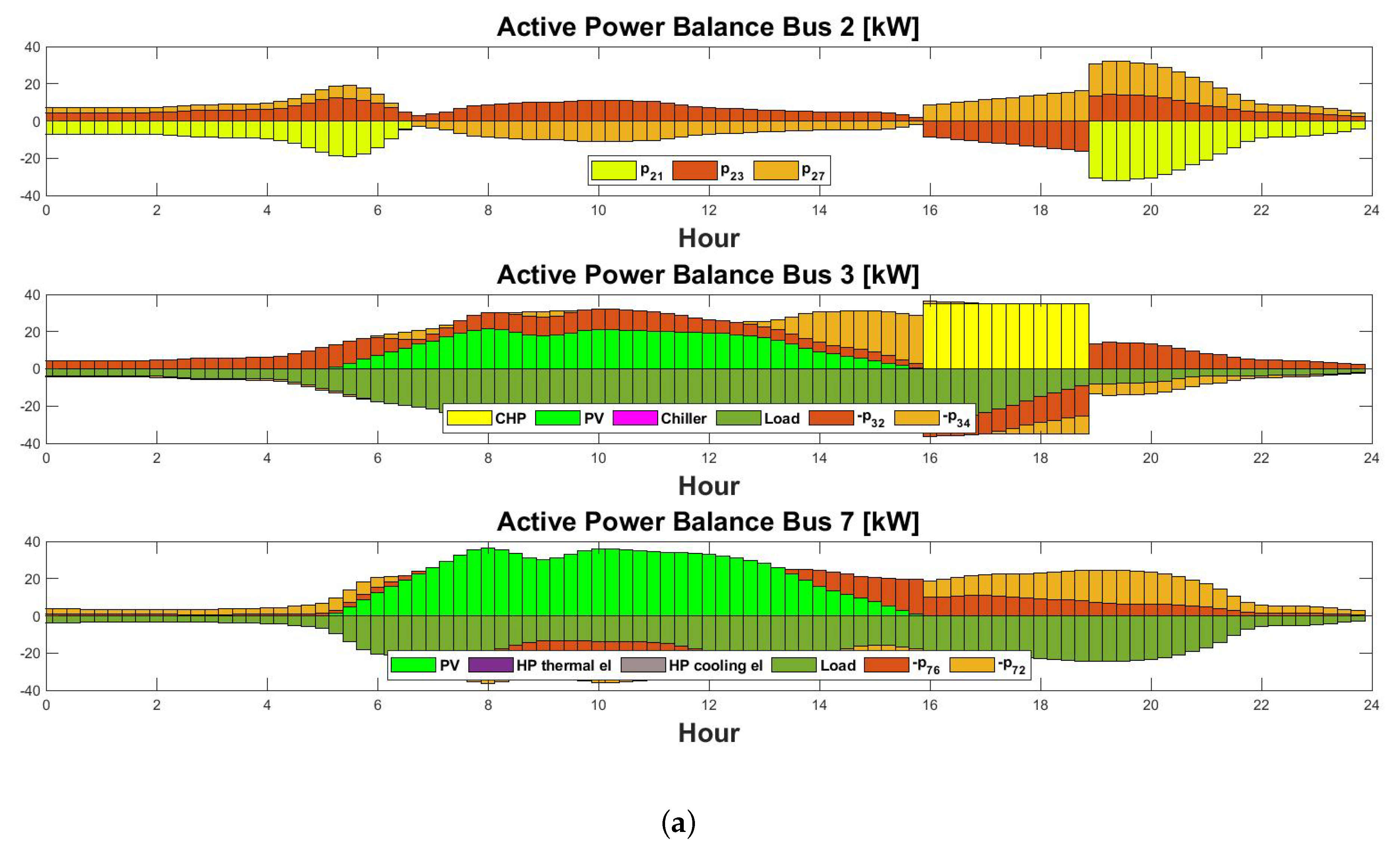
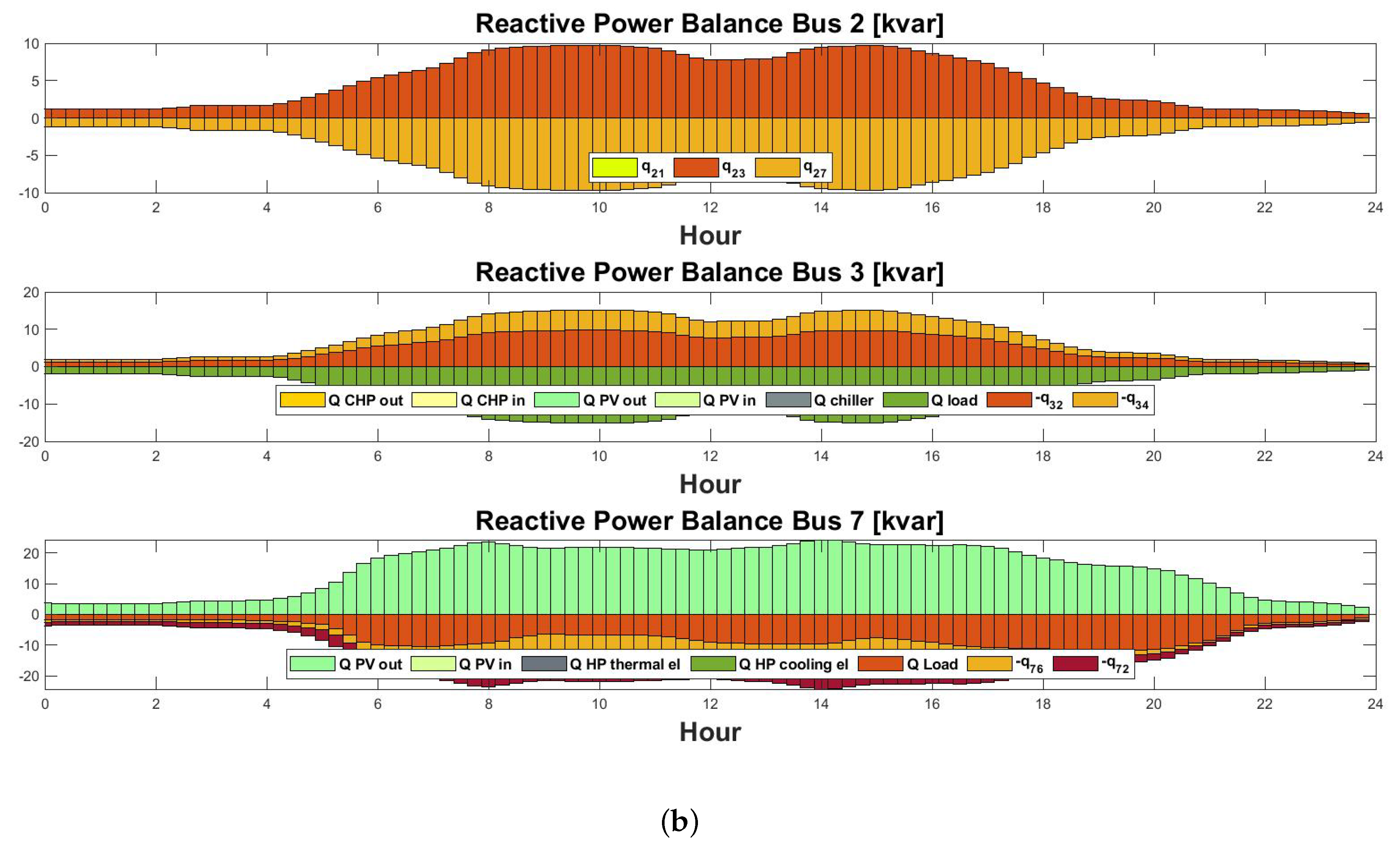
- Case considering E-mobility: Active and reactive power flowing across different busses in the microgrid are considered here with E-mobility. On a typical summer day, the microgrid exhibits a dynamic and adaptive energy distribution pattern, as illustrated by Figure 5. During daylight hours, the availability of sunlight allows the PV system to significantly contribute to the power supply, covering a substantial portion of the energy demand. The CHP unit efficiently operates during the day due to the request from the grid to satisfy the load and at night when solar power is unavailable. As the sun sets, the graph reveals a shift in energy sources, with a notable presence of the CHP unit and an increasing contribution from the grid. Interestingly, the demand for electric mobility charging emerges, either directly from the grid or supplied by the CHP unit at night. An interesting trend can be seen for the reactive power request: photovoltaics are supplying reactive power services even at night, with significant contributions from CHP and some from the wind turbine for the reactive power request.
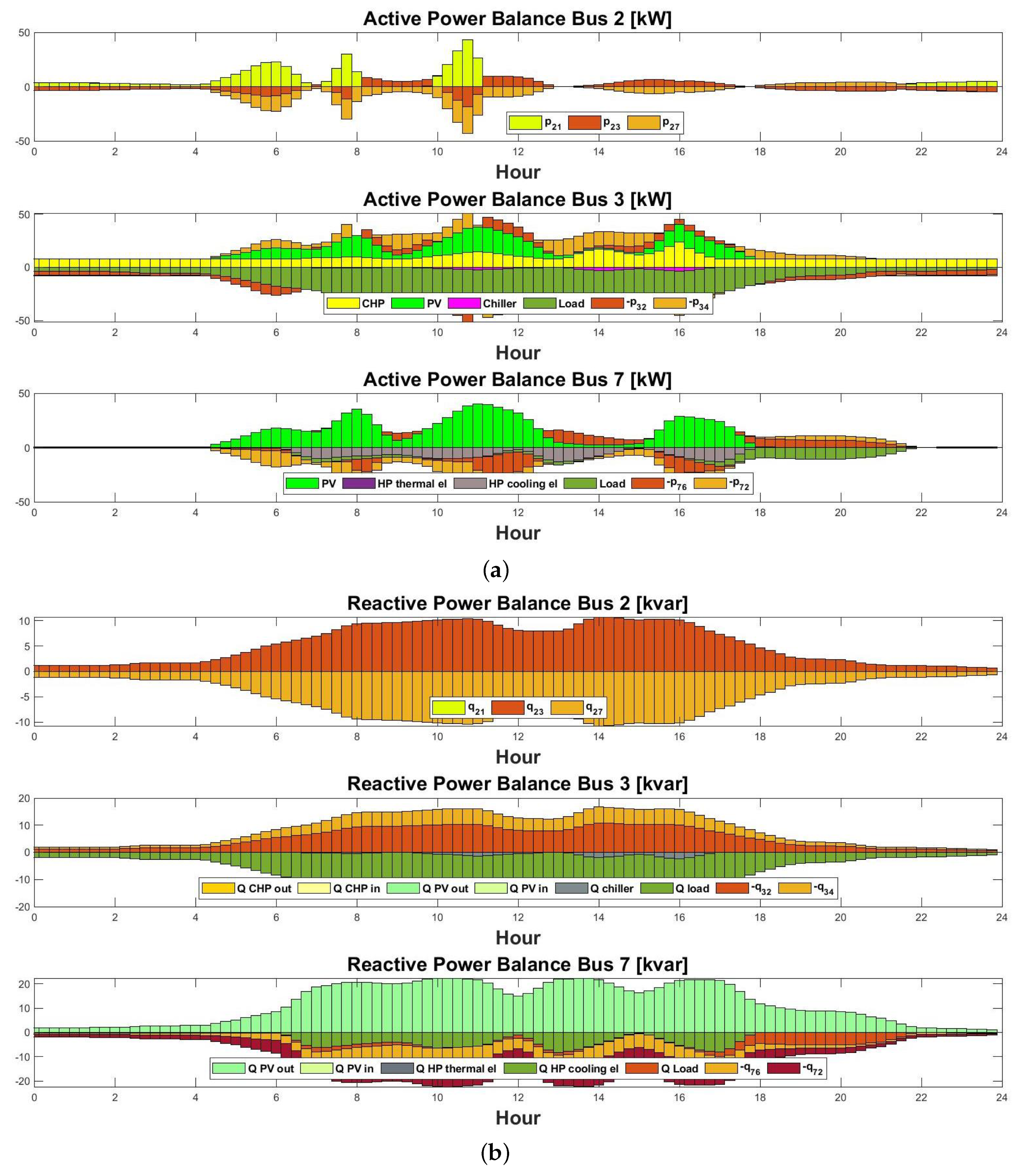
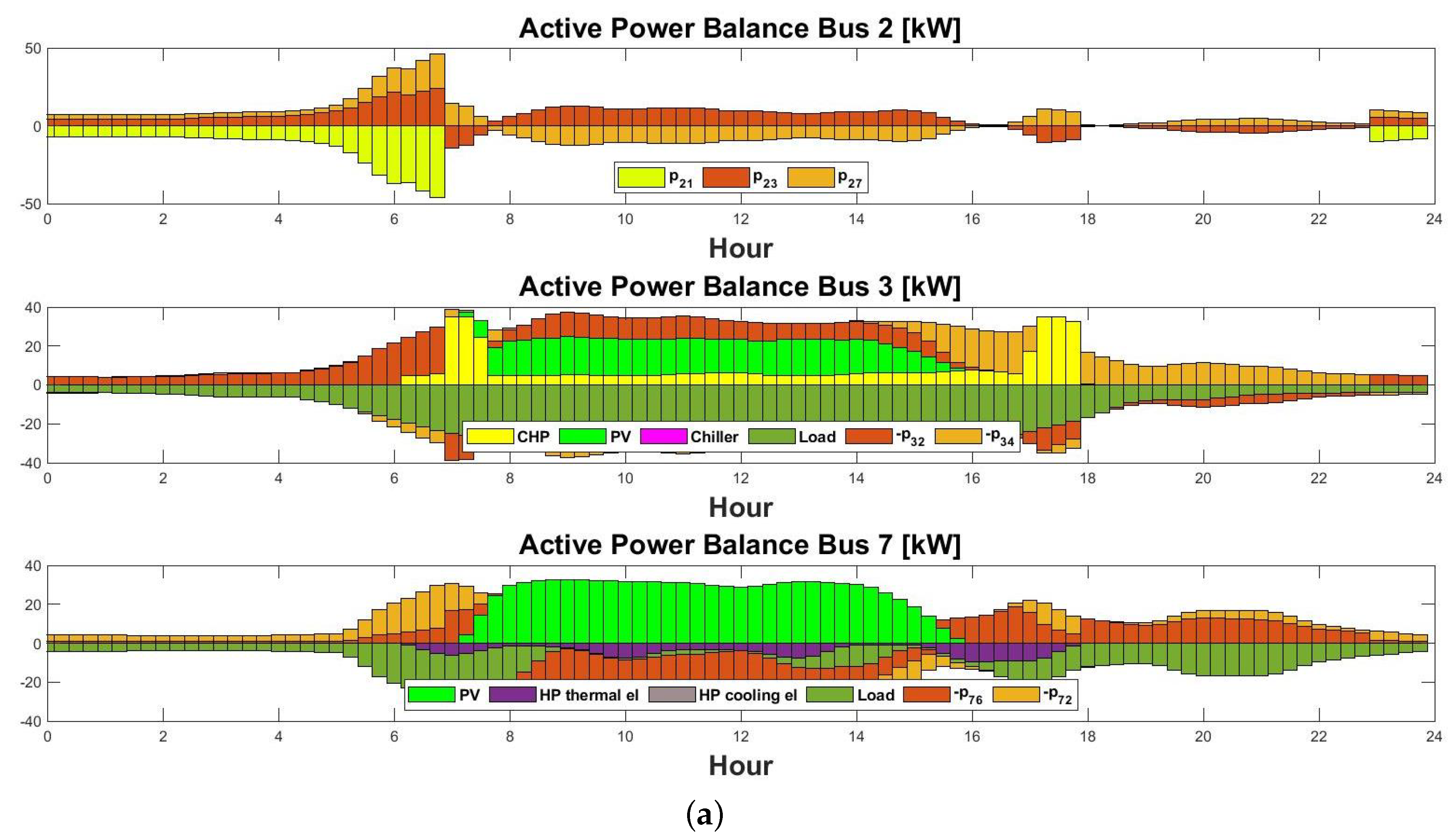
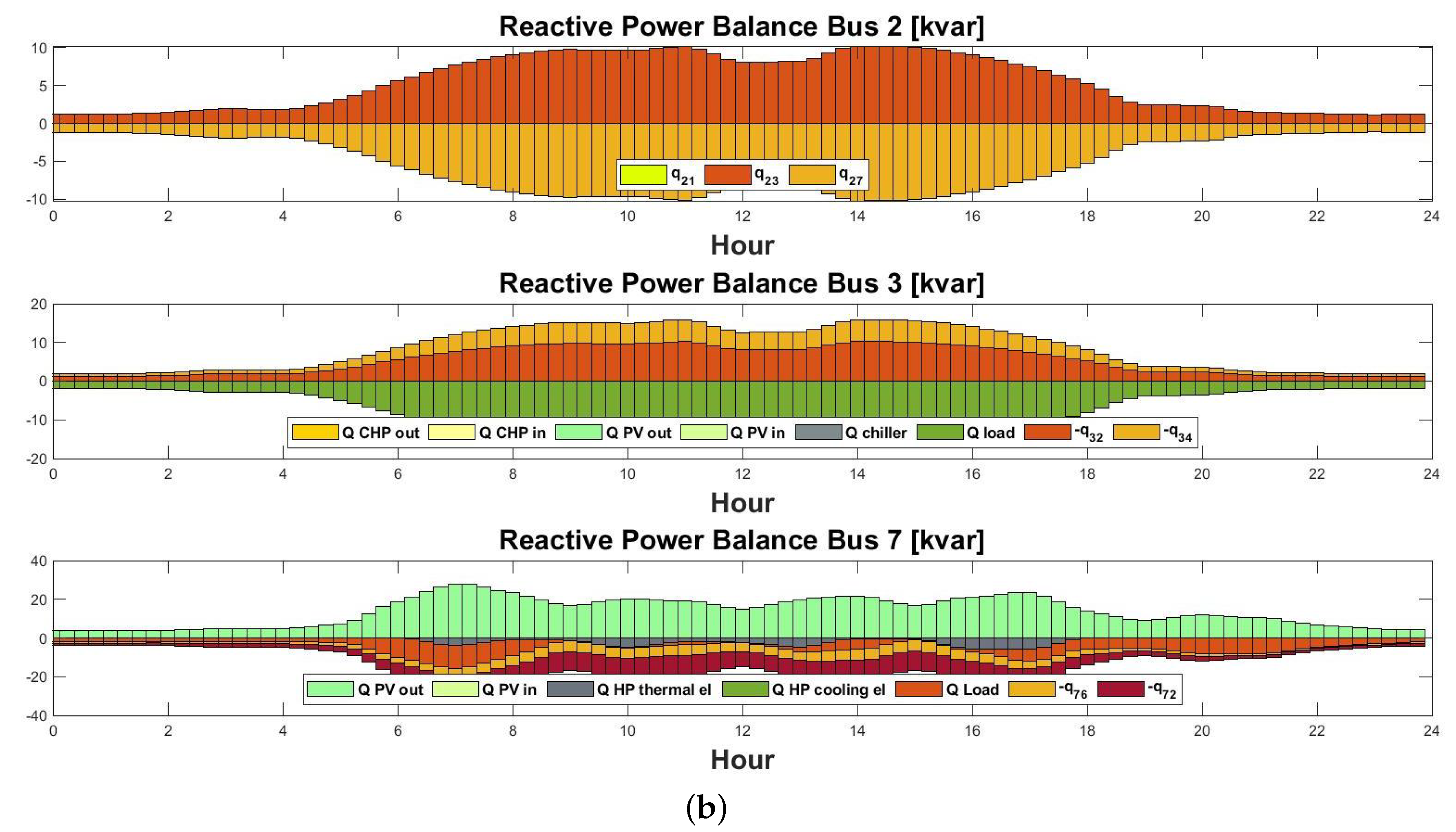
- Case without considering E-mobility: Active and reactive power flowing in and out of the microgrid across different buses on a typical summer day, excluding E-mobility considerations, are shown in Figure 10 (a) and (b) respectively. On a typical summer day, excluding the EV scenario, it is evident that the majority of the load demand is met by PV generation. In certain instances, there is even surplus energy available for sale to the external grid. Additionally, a portion of the load demand is fulfilled by CHP, contributing to a scenario where minimal energy is procured from the external grid.
5.1.2. Typical Winter Day
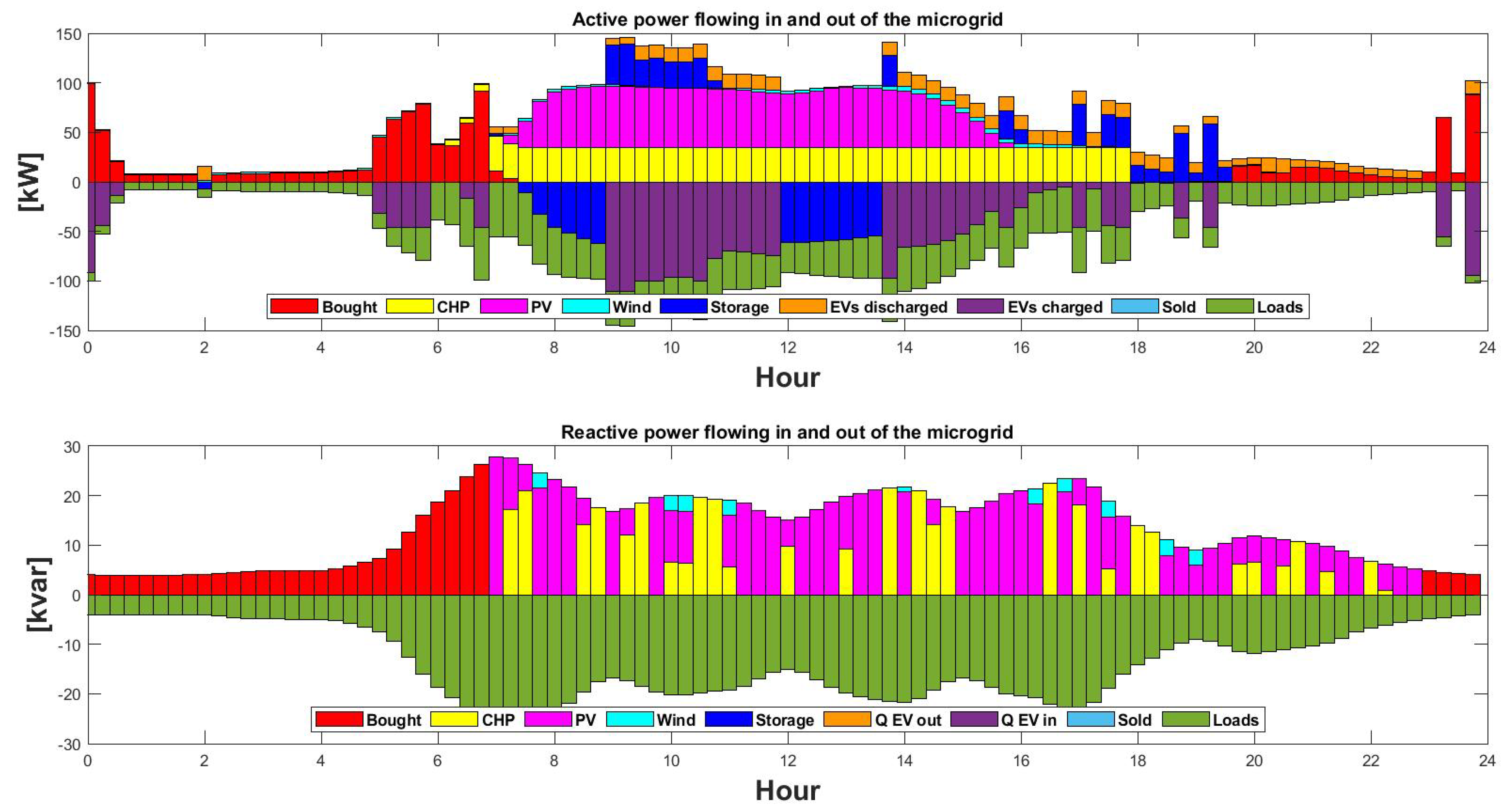
- Case considering E-mobility: Active and reactive power flowing across different buses in the microgrid on a typical winter day with E-mobility is shown in Figure 11. During the winter season, when sunlight availability is diminished, the load requirements are diversely addressed by alternative technologies. The CHP system, wind turbine, and occasionally, V2G interactions, play pivotal roles in satisfying the load demand. Additionally, the BESS is employed in certain instances when necessary, due to the shortfall from other sources, energy is bought from the external grid. This dynamic mix effectively addresses the challenges posed by reduced solar availability.
- Case without considering E-mobility: In the scenario of a typical winter day without E-mobility, the load request experiences a reduction, and predominantly, the active power demand is met solely by the RES. During periods of RES unavailability, the deficient portion is bought either from the external grid or generated by the CHP system. On the other hand, the provision of reactive power is managed by on-site RESs or other technologies present in different buses. Active and reactive power flowing in different buses are shown in Figure 15 (a) and (b) respectively.
5.1.3. Off-Season Day
- Case considering E-mobility: In the off-season case, active and reactive power flows across different buses in the microgrid for a typical off-season day with E-mobility are depicted in Figure 16. This scenario explores the integration of E-mobility within microgrids. The bar graph visually demonstrates the significant impact of E-mobility on the power flow within the microgrid and its buses. When the microgrid is unable to meet the power demand internally, it absorbs the required power from the external grid. Additionally, there are instances where a portion of the power demand is fulfilled through V2G technology.

- Case without considering E-mobility: Active and reactive power flows across different buses in the microgrid on a typical off-season day without E-mobility are shown in Figure 19a,b. With the detailed analysis of the bus-wise power flow, we can see that in the absence of RES production, the CHP is turned on to satisfy the load request, and part of the request is satisfied from the external grid.
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| BESS | Battery Energy Storage System |
| CEI | Comitato Elettrotecnico Italiano |
| CHP | Combined Heat and Power |
| COP | Coefficient of Performance |
| DC | Direct Current |
| DCFC | DC Fast Charger |
| DER | Distributed Energy Source |
| EER | Energy Efficiency Ratio |
| EMS | Energy Management System |
| ESS | Energy Storage System |
| EV | Electric Vehicle |
| GHG | Green House Gas |
| HP | Heat Pump |
| IEA | International Energy Agency |
| IRENA | International Renewable Energy Agency |
| LF | Load Flow |
| MCC | Microgrid Control Center |
| MG | Microgrid |
| MILP | Mixed Integer Linear Programming |
| MINLP | Mixed Integer Non-Linear Programming |
| PED | Positive Energy District |
| PV | Photo Voltaic |
| REC | Renewable Energy Community |
| RES | Renewable Energy Source |
| SEB | Smart Energy Building |
| SET | Strategic Energy Technology Plan |
| SOC | State of Charge |
| V2G | Vehicle To Grid |
Appendix A
Appendix A.1. Mathematical Formulas and Definitions
- : Available power from the RES [kW]
- : Nominal apparent power of the RES inverter [kVA]
- : Nominal apparent power of the CHP inverter [kVA]
- : Electrical power correction factor (altitude dependent)
- : Electrical power correction factor (temperature dependent)
- and : Constant coefficients (experimentally evaluated)
- and : Constant coefficients related to partial load behavior
- : Cost of Fuel for CHP [€/kWh]
- : Active power electrical demand [kW]
- : Reactive power electrical demand [kvar]
- : Maximum power bought from the national grid [kW]
- : Maximum power sold to the national grid [kW]
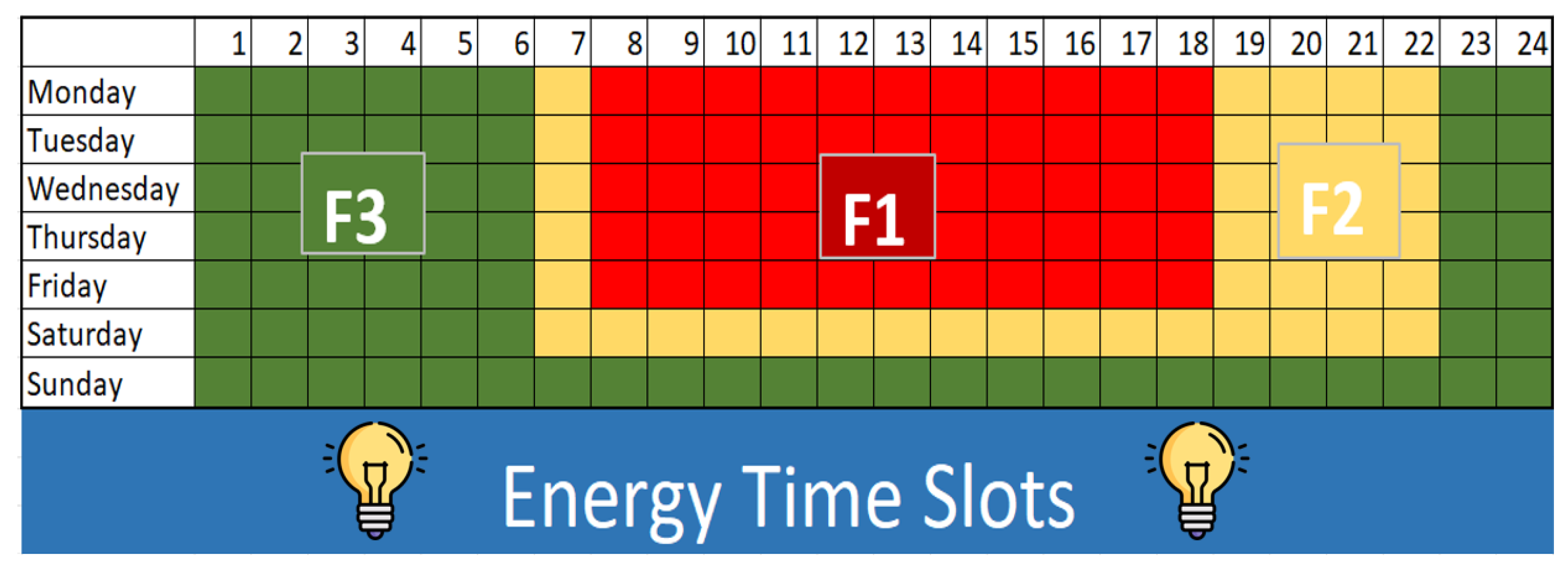
- : Price of electricity bought [€/kWh]. The dynamic electricity pricing depends on the time slots based on the F1, F2, and F3 slots, as shown below in Figure A1:
- : Revenue for electricity sold [€/kWh]
- : Price of reactive power withdrawn [€/kvar h]
- : Revenue for reactive power injected [€/kvar h]
- : Cost of curtailment for the RES [€/kWh]Curtailment costs for the RESs are considered equal to the LCOE for the respective technology and the price of the fuel is at par with the market price:, ,
- : Nominal apparent power of the transformer [kVA]
- : Nominal voltage (line to line) primary side [kV]
- : Nominal voltage (line to line) secondary side [kV]
- : On Load loss of the transformer [W]
- : Short circuit voltage of the transformer [-]The parameters for the transformer system are as follows: , , , , and .
- , : Charging and discharging efficiencies
- , : Max charging and discharging power [kW]
- , : Min charging and discharging power [kW]
- : Nominal apparent power of the electrical storage inverter [kVA]
- : Rated capacity of the storage system [kWh]
- : Number of batteries
- , : Min and max states of charge
- : Ideal self-discharging rate
- : Time interval, where = 0.25
- , , : Max charging powers [kW]
- : Max discharging power V2G [kW]
- : EV availability
- , : Min and max states of charge [%]
- : Initial state of charge
- , : State of charge at arrival and departure [%]
- : Capacity of EV battery [kWh]
- , : Charging efficiencies for AC and DC chargers
- , : Charging and discharging efficiencies for V2G chargers
- : Vehicle energy consumption [kWh/km]
- : Vehicle transportation demand [km]
- : Factor for calculating self-discharging
- , , : Constants from product data sheets
- : Ambient temperature
- : Constant from product data sheets
- : COP of Heat pump
- : EER of Heat pump
- : Max thermal power by heat pump (temperature dependent)
- : Max cooling power by heat pump (temperature dependent)
- , , , and .
- : Min thermal power of chiller
- : Max thermal power of chiller (temperature dependent)
- : Factor for determining electrical power absorbed
- Additional data: , , , ,
- . The efficiencies for heating, cooling, and the chiller are , , and , respectively.
References
- GSR2022-Full Report. Renewables 2022 Global Status Report. Available online: https://www.ren21.net/wp-content/uploads/2019/05/GSR2022_Full_Report.pdf (accessed on 20 January 2022).
- Net Zero Tracker. Post-COP26 Snapshot. Available online: https://zerotracker.net/analysis/post-cop26-snapshot (accessed on 19 January 2022).
- Energy Information Administration (EIA). Wholesale Electricity Prices Trended Higher in 2021 Due to Increasing Natural Gas Prices, Today in Energy. Available online: https://www.eia.gov/todayinenergy/detail.php?id=50798 (accessed on 7 January 2022).
- Carbon Brief. COP26: Key Outcomes Agreed at the UN Climate Talks in Glasgow. Available online: https://www.carbonbrief.org/cop26-key-outcomes-agreed-at-the-un-climate-talks-in-glasgow (accessed on 15 November 2021).
- COP26. COP26 Presidency Outcomes: The Climate Pact. Available online: https://ukcop26.org/wp-content/uploads/2021/11/COP26-Presidency-Outcomes-The-Climate-Pact.pdf (accessed on 15 November 2021).
- Global Energy Monitor. Global Ownership of Coal Plants, Global Coal Plant Tracker. Available online: https://globalenergymonitor.org/projects/global-coal-plant-tracker/summary-tables (accessed on 18 February 2022).
- IEA. op. cit. Note 41; IRENA, World Energy Transitions Outlook 2021. Available online: https://irena.org/publications/2021/Jun/World-EnergyTransitions-Outlook (accessed on 2 November 2021).
- Katiraei, F.; Iravani, R.; Hatziargyriou, N.; Dimeas, A. Microgrids management. IEEE Power Energy Mag. 2008, 6, 54–65. [Google Scholar] [CrossRef]
- Sawhney, A.; Bracco, S.; Delfino, F.; Bonvini, B. Optimal planning and operation of a small size Microgrid within a Positive Energy District. In Proceedings of the 2022 AEIT International Annual Conference (AEIT), Rome, Italy, 3–5 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- IEC 61970; Energy Management System Application Program Interface (EMS-API)-ALL PARTS. International Electrotechnical Commission: Geneva, Switzerland, 2005.
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Microgrids energy management systems: A critical review on methods, solutions, and prospects. Appl. Energy 2018, 222, 1033–1055. [Google Scholar] [CrossRef]
- Chen, C.; Duan, S.; Cai, T.; Liu, B.; Hu, G. Smart energy management system for optimal microgrid economic operation. IET Renew Power Gener. 2011, 5, 258–267. [Google Scholar] [CrossRef]
- Byrne, R.H.; Nguyen, T.A.; Copp, D.A.; Chalamala, B.R.; Gyuk, I. Energy Management and Optimization Methods for Grid Energy Storage Systems. IEEE Access 2018, 6, 13231–13260. [Google Scholar] [CrossRef]
- An, L.N.; Lam, N.T.; Tuan, T.Q. Optimal energy management strategies of microgrids. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016. [Google Scholar]
- Zaree, N.; Vahidinasab, V. An MILP formulation for centralized energy management strategy of microgrids. In Proceedings of the 2016 Smart Grids Conference (SGC), Kerman, Iran, 20–21 December 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Kantor, I.; Robineau, J.-L.; Butun, H.; Maréchal, F. A mixed-integer linear programming formulation for optimizing multi-scale material and energy integration. Front. Energy Res. 2020, 8, 49. [Google Scholar] [CrossRef]
- Shafiullah, M.; Abido, M.; Hossain, M.; Mantawy, A. An improved OPP problem formulation for distribution grid observability. Energies 2018, 11, 3069. [Google Scholar] [CrossRef]
- Shafiullah, M.; Hossain, M.I.; Abido, M.A.; Abdel-Fattah, T.; Mantawy, A.H. A modified optimal PMU placement problem formulation considering channel limits under various contingencies. Measurement 2019, 135, 875–885. [Google Scholar] [CrossRef]
- Derkenbaeva, E.; Vega, S.H.; Hofstede, G.J.; van Leeuwen, E. Positive energy districts: Mainstreaming energy transition in urban areas. Renew. Sustain. Energy Rev. 2022, 153, 111782. [Google Scholar] [CrossRef]
- IEA EBC Annex 83. Positive Energy Districts. 2020. Available online: https://annex83.iea-ebc.org (accessed on 10 December 2022).
- Bossi, S.; Gollner, C.; Theierling, S. Towards 100 positive energy districts in europe: Preliminary data analysis of 61 european cases. Energies 2020, 13, 22. [Google Scholar] [CrossRef]
- Lindholm, O.; Rehman, H.u.; Reda, F. Positioning positive energy districts in european cities. Buildings 2021, 11, 19. [Google Scholar] [CrossRef]
- Urban Europe. Available online: https://jpi-urbaneurope.eu/ (accessed on 19 December 2022).
- Urban Europe. Europe towards Positive Energy Districts: A Compilation of Projects Towards Sustainable Urbanization and the Energy Transition; Urban Europe: Bruxelles, Belgium, 2020. [Google Scholar]
- Alpine Space EU. Available online: https://www.alpine-space.eu/projects/alpgrids/en/home (accessed on 15 December 2022).
- Savona Campus. Available online: https://campus-savona.unige.it/en/ (accessed on 29 September 2022).
- Energia 2020 Project. Available online: http://www.energia2020.unige.it/en/home/ (accessed on 23 December 2022).
- Bianco, G.; Bonvini, B.; Bracco, S.; Delfino, F.; Laiolo, P.; Piazza, G. Key Performance Indicators for an Energy Community based on sustainable technologies. Sustainability 2021, 13, 16. [Google Scholar] [CrossRef]
- IRE Liguria. Available online: http://www.ireliguria.it (accessed on 12 March 2023).
- Available online: https://re.jrc.ec.europa.eu/pvg_tools/en/ (accessed on 15 July 2023).
- European Alternative Fuels Observatory. Available online: https://alternative-fuels-observatory.ec.europa.eu/general-information/recharging-systems (accessed on 12 September 2023).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Car Model Number | Charging Mode | Battery Type | Total No. of Cars | Battery Usable Capacity [kWh] | Range [km] | Vehicle Consumption [Wh/km] | AC Charging [kW] | DC Fast Charging [kW] | V2G Charging [kW] | V2G Discharging [kW] |
|---|---|---|---|---|---|---|---|---|---|---|
| Audi Q8 e-tron 55 quattro | AC/DC | Lithium-ion | 1 | 106 | 495 | 214 | 22 | 50 | 15 | 0 |
| Nissan Leaf e+ | AC/DC/V2G | Lithium-ion | 3 | 59 | 340 | 174 | 7 | 46 | 15 | 7 |
| Tesla Model X Plaid | AC/DC | Lithium-ion | 1 | 95 | 455 | 209 | 11 | 50 | 15 | 0 |
| Renault Kangoo E-Tech Electric | AC/DC | Lithium-ion | 2 | 44 | 215 | 205 | 22 | 50 | 15 | 0 |
| Fiat 500e Cabrio | AC/DC | Lithium-ion | 2 | 21 | 135 | 158 | 11 | 50 | 15 | 0 |
| Renault Zoe ZE50 R135 | AC/DC | Lithium-ion | 1 | 52 | 310 | 135 | 22 | 46 | 15 | 0 |
| Nissan e-NV200 Evalia | AC/DC/V2G | Lithium-ion | 1 | 22 | 105 | 210 | 7 | 46 | 15 | 7 |
| Smart EQ fortwo coupe | AC | Lithium-ion | 3 | 17 | 100 | 167 | 22 | 0 | 0 | 0 |
| Charging Station | No of Chargers | Max Power [kW] |
|---|---|---|
| AC | 2 | 22 |
| DC | 2 | 50 |
| V2G 1 | 2 | 15 |
| Bus Number | Size of PV Plant [kWp] | Size of CHP Engine [kWel] | Size of μWind Turbine [kW] | BESS Size [kWh] |
|---|---|---|---|---|
| BUS 1 | 0 | 0 | 0 | 0 |
| BUS 2 | 0 | 0 | 0 | 0 |
| BUS 3 | 45.57 | 35 | 0 | 0 |
| BUS 4 | 0 | 0 | 10 | 0 |
| BUS 5 | 12.06 | 0 | 0 | 360 |
| BUS 6 | 12.06 | 0 | 0 | 0 |
| BUS 7 | 81.07 | 0 | 0 | 0 |
| Technology | Thermal Capacity [kWth] | Cooling Capacity [kWcool] |
|---|---|---|
| Absorption Chiller | 0 | 52.7 |
| CHP 2 | 74 | 0 |
| Heat Pump 3,4 | 43.4 | 49 |
| Building | Electrical Peak Load (kWel) | Thermal Peak Load [kWth] | Cooling Peak Load [kWcool] |
|---|---|---|---|
| MCC Building | 99 | 16.05 | 40.3 |
| Students Accommodation | 30 | 30.44 | 35.8 |
| Case | I | II |
|---|---|---|
| Typical summer day | With E-mobility | Without E-mobility |
| Typical winter day | With E-mobility | Without E-mobility |
| off-season day | With E-mobility | Without E-mobility |
| EMS with E-mobility Data | EMS without E-Mobility Data | |||||
|---|---|---|---|---|---|---|
| Typical Summer Day | Typical Winter Day | Off-Season Day | Typical Summer Day | Typical Winter Day | Off-Season Day | |
| Costs [€] | 90.76 | 277.24 | 342.63 | 113.70 | 72.18 | 60.35 |
| Revenues [€] | 2.37 × 10−15 | 2.13 × 10−15 | 2.43 × 10−15 | 1.06 × 101 | 2.22 × 10−15 | 1.77 × 10−15 |
| E bought [kWh] | 90.76 | 244.49 | 342.63 | 0 | 111.89 | 157.45 |
| E sold [kWh] | 2.37 × 10−14 | 9.37 × 10−15 | 2.43 × 10−14 | 1.06 × 102 | 2.22 × 10−14 | 1.77 × 10−14 |
| E PV [kWh] | 451.13 | 441.83 | 490.01 | 451.13 | 441.83 | 490.01 |
| E wind [kWh] | 6.00 | 34.58 | 3.65 | 6.00 | 34.58 | 3.65 |
| E PV curt [kWh] | 0 | 0 | 0 | 0 | 0 | 0 |
| E wind curt [kWh] | 0 | 0 | 0 | 0 | 0 | 0 |
| E EV produced [kWh] | 125.44 | 152.82 | 175.47 | - | - | - |
| E EV absorbed [kWh] | 572.36 | 604.24 | 627.06 | - | - | - |
| E sto produced [kWh] | 91.16 | 144.20 | 137.25 | 99.16 | 157.98 | 88.41 |
| E sto absorbed [kWh] | 109.47 | 169.68 | 161.08 | 117.61 | 190.51 | 107.39 |
| E loads [kWh] | 1132.64 | 1269.97 | 1364.18 | 560.28 | 665.73 | 737.12 |
| E CHP [kWh] | 477.63 | 388.99 | 376.25 | 227.61 | 109.96 | 105.00 |
| Q buy tot [kvarh] | 33.00 | 60.91 | 55.77 | 0 | 0 | 0 |
| Q sold tot [kvarh] | 0 | 0 | 0 | 0 | 0 | 0 |
| Q PV produced [kvarh] | 154.61 | 170.10 | 163.42 | 285.21 | 329.50 | 357.00 |
| Q wind produced [kvarh] | 5.73 | 7.18 | 0 | 0 | 0 | 0 |
| Q CHP produced [kvarh] | 91.87 | 91.31 | 137.81 | 0 | 0 | 0 |
| Heating Energy CHP [kWh] | 0 | 114.62 | 0 | 0 | 114.62 | 0 |
| Heating Energy chiller Absorbed [kWh] | 408.99 | 0 | 0 | 408.99 | 0 | 0 |
| Cooling Energy chiller [kWh] | 133.79 | 0 | 0 | 133.79 | 0 | 0 |
| Heating Energy HP [kWh] | 0 | 163.54 | 0 | 0 | 163.54 | 0 |
| Cooling Energy HP [kWh] | 237.51 | 0 | 0 | 237.51 | 0 | 0 |
| Heating Energy CHP chiller [kWh] | 430.51 | 0 | 0 | 430.51 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sawhney, A.; Delfino, F.; Bonvini, B.; Bracco, S. EMS for Active and Reactive Power Management in a Polygeneration Microgrid Feeding a PED. Energies 2024, 17, 610. https://doi.org/10.3390/en17030610
Sawhney A, Delfino F, Bonvini B, Bracco S. EMS for Active and Reactive Power Management in a Polygeneration Microgrid Feeding a PED. Energies. 2024; 17(3):610. https://doi.org/10.3390/en17030610
Chicago/Turabian StyleSawhney, Abhinav, Federico Delfino, Barbara Bonvini, and Stefano Bracco. 2024. "EMS for Active and Reactive Power Management in a Polygeneration Microgrid Feeding a PED" Energies 17, no. 3: 610. https://doi.org/10.3390/en17030610
APA StyleSawhney, A., Delfino, F., Bonvini, B., & Bracco, S. (2024). EMS for Active and Reactive Power Management in a Polygeneration Microgrid Feeding a PED. Energies, 17(3), 610. https://doi.org/10.3390/en17030610