
Phase Field Modeling of Hydraulic Fracturing with Length-Scale Insensitive Degradation Functions

Abstract
1. Introduction
2. Mathematical Modeling in Porous Medias
2.1. The Theory of New Energy Functional
2.2. The Energy Degradation Function
2.3. Phase Field
2.4. Fluid Pressure Field
3. Implementation of the Finite Element Method
4. Numerical Examples
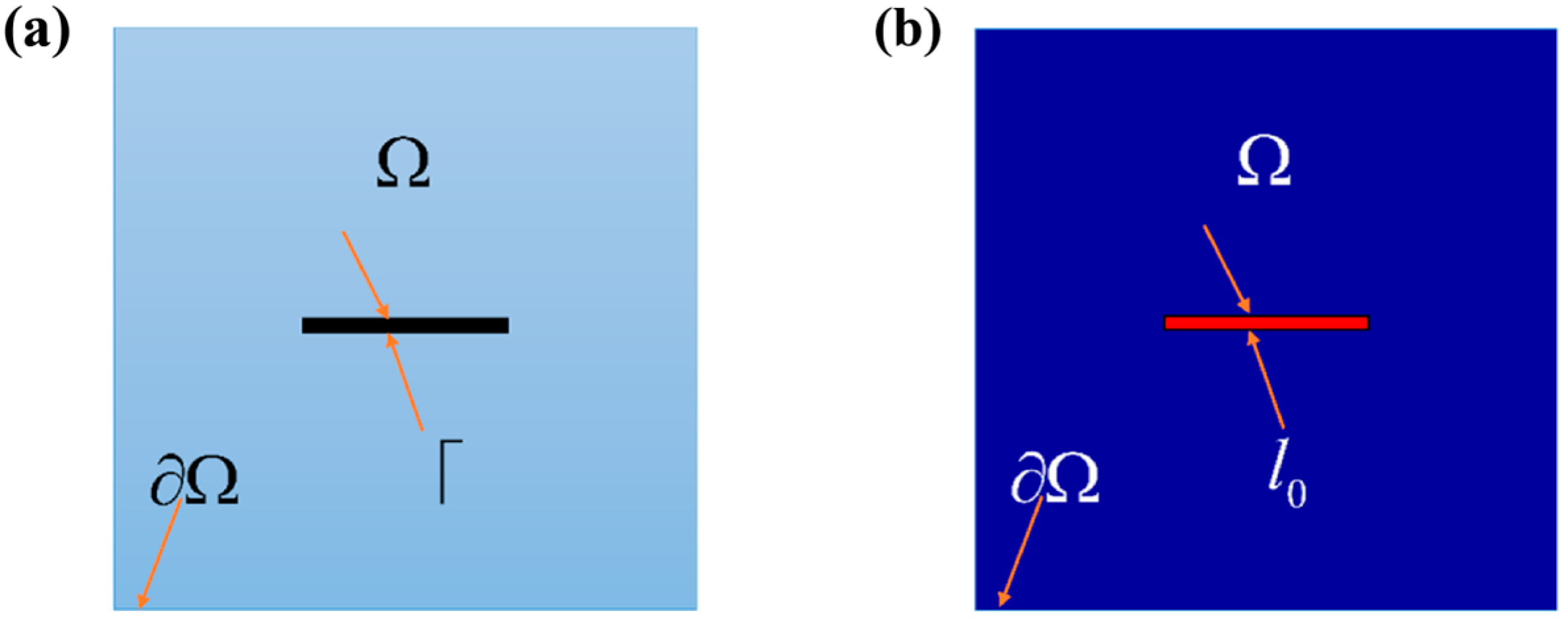
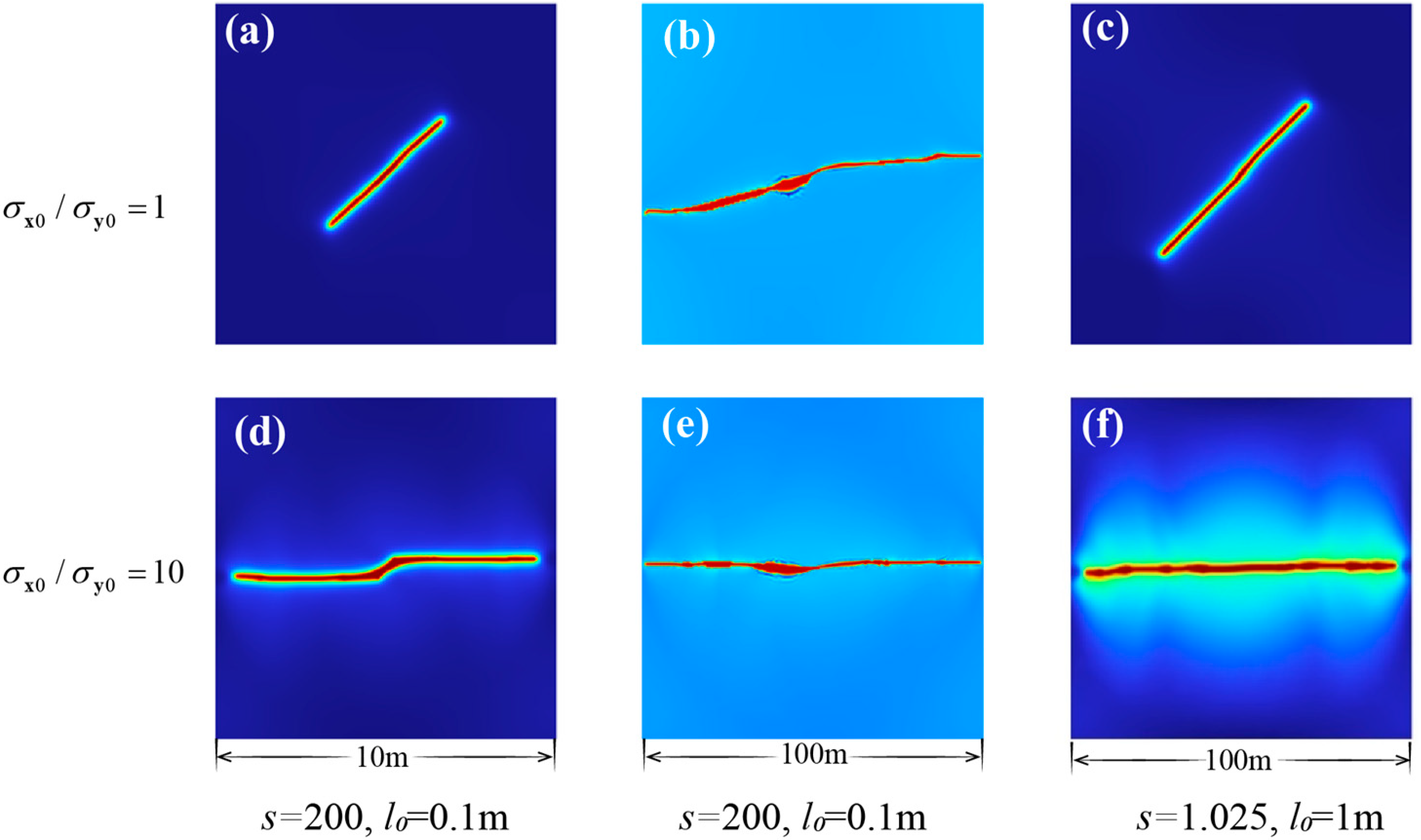
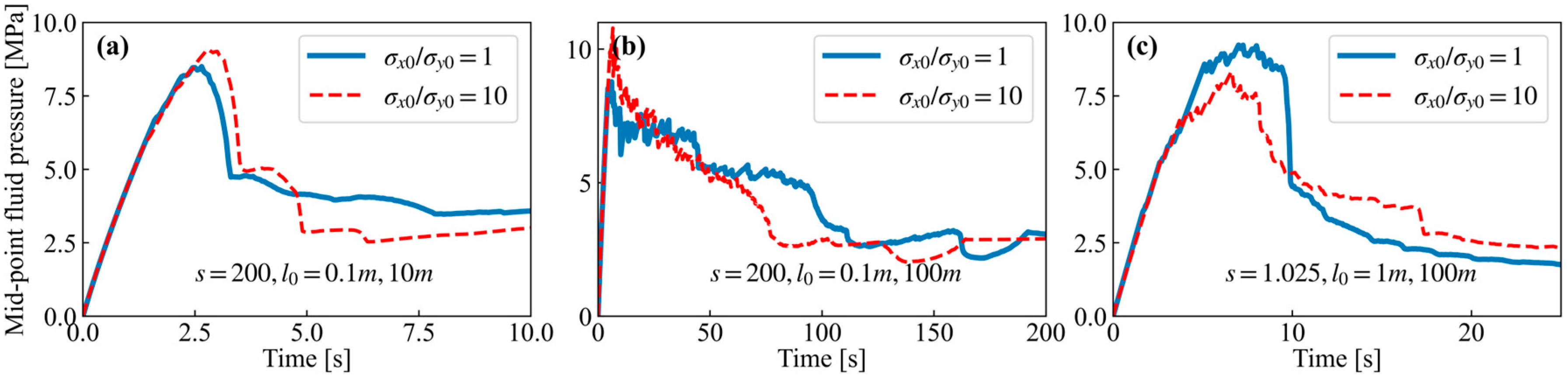
4.1. Fracture from Inclined Notch
4.2. Fracture Occurs at a Horizontal Notch
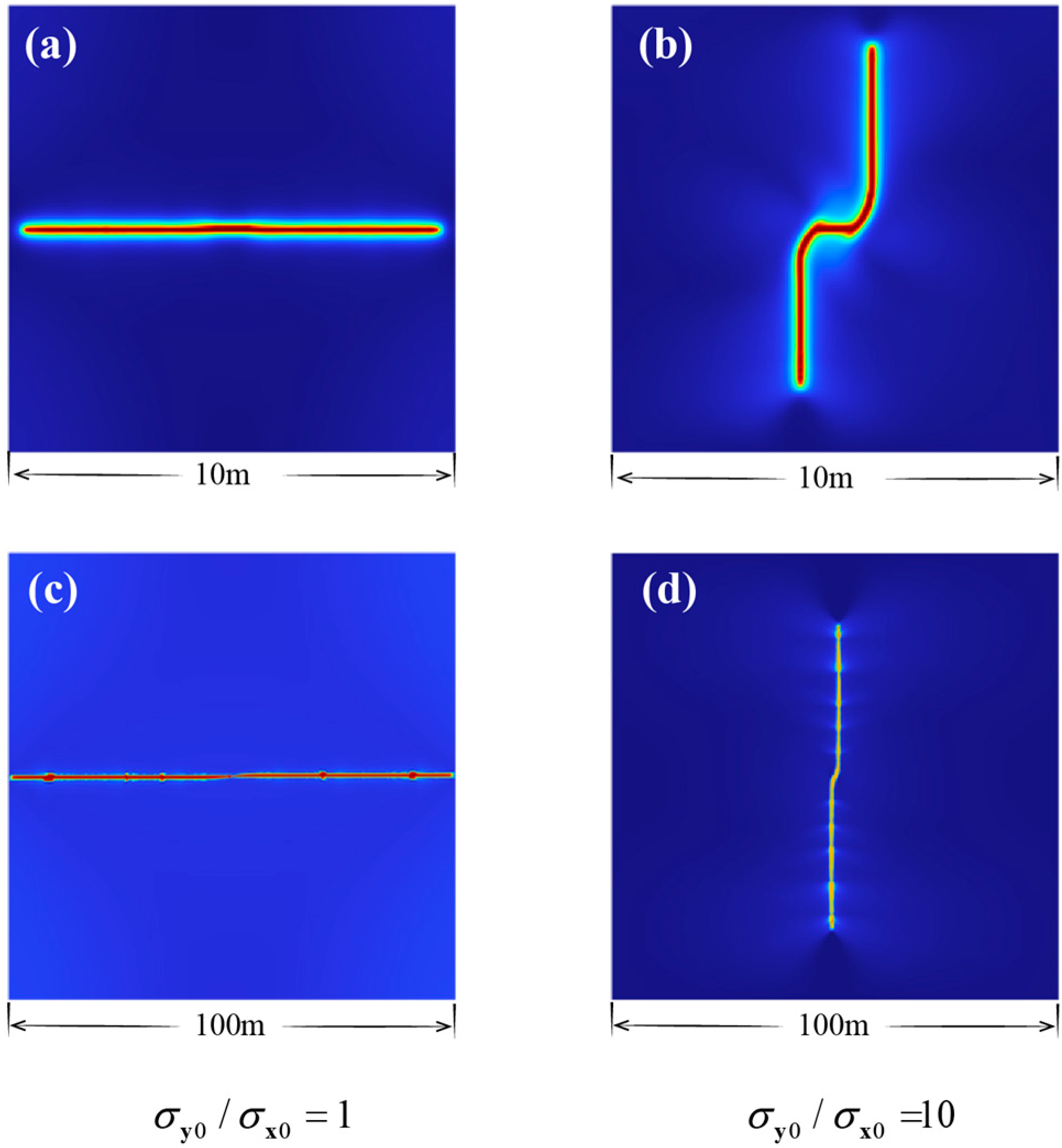
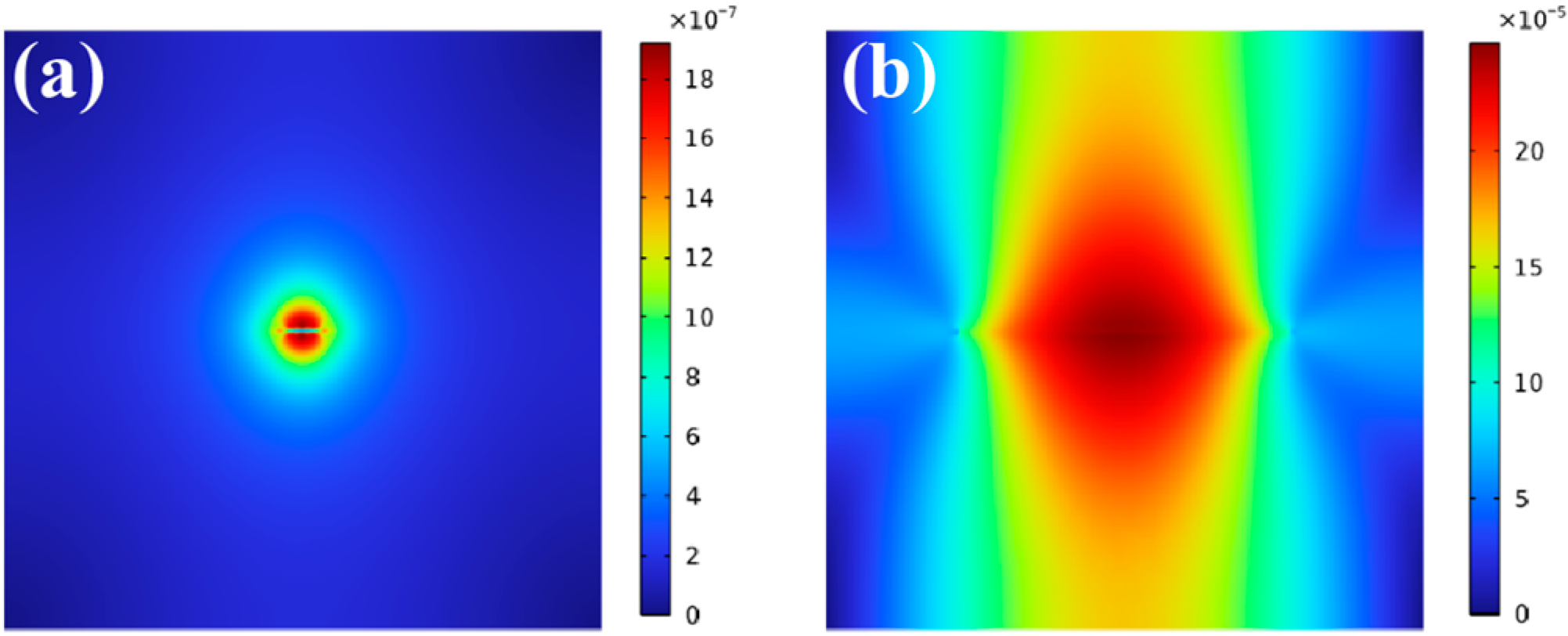
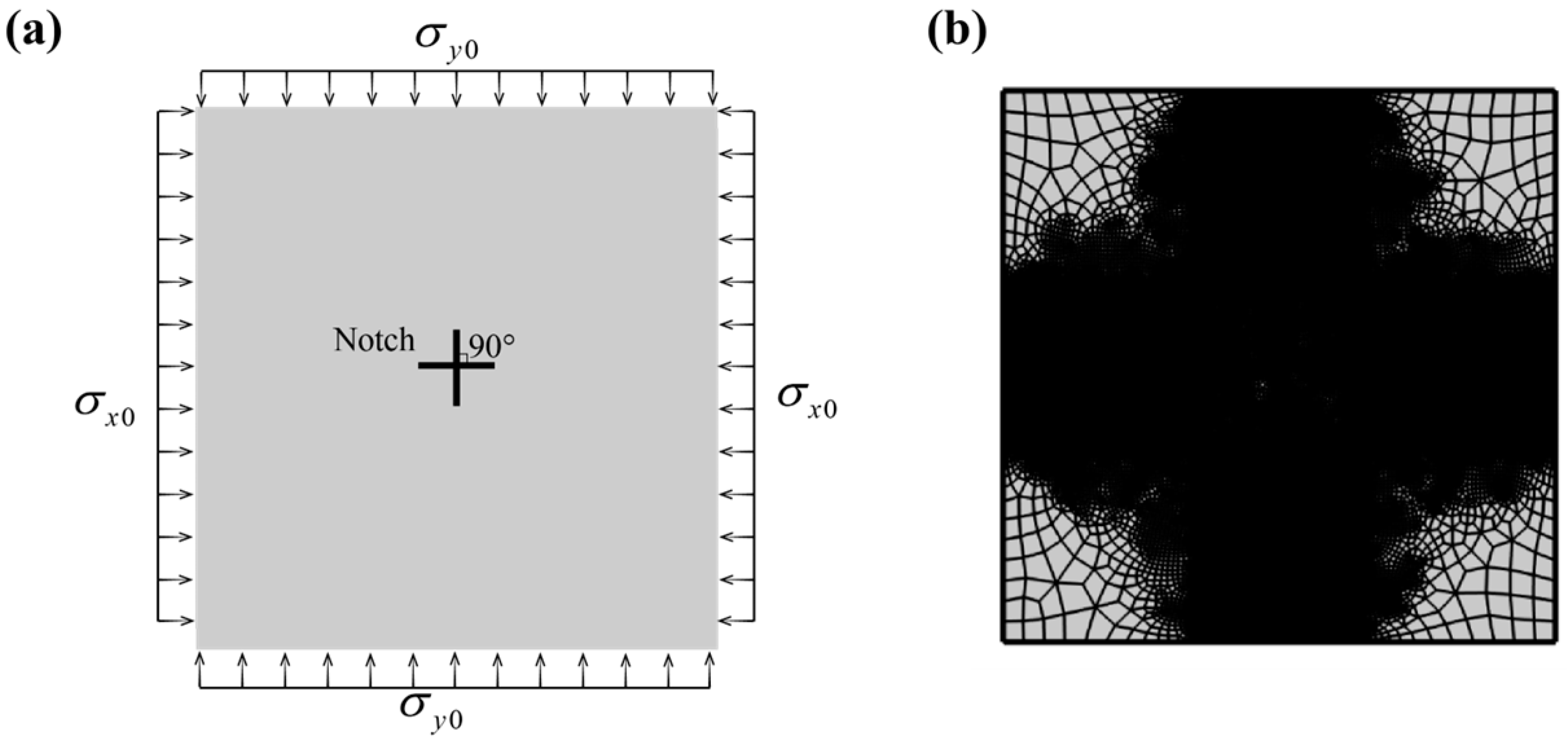
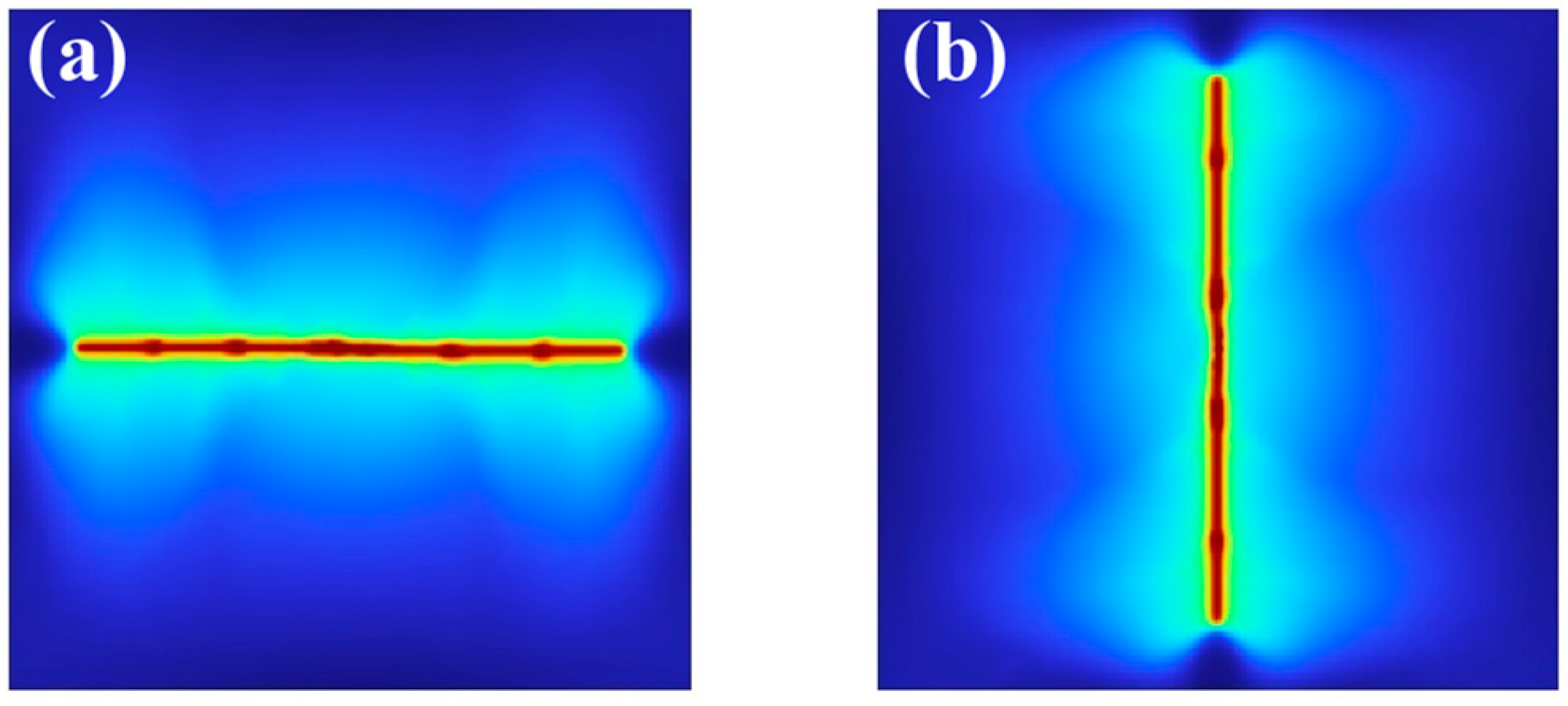
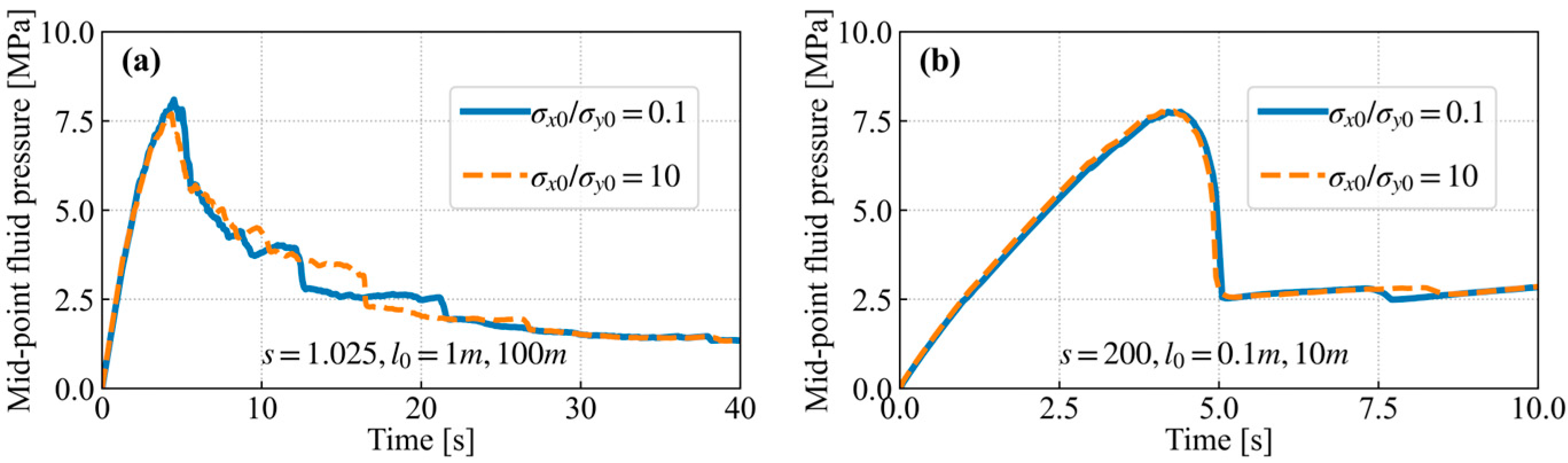
4.3. Fractures along Two Vertically Intersected Notches
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vidic, R.D.; Brantley, S.L.; Vandenbossche, J.M.; Yoxtheimer, D.; Abad, J.D. Impact of shale gas development on regional water quality. Science 2013, 340, 1235009. [Google Scholar] [CrossRef] [PubMed]
- Ren, F.; Ma, G.; Fan, L.; Wang, Y.; Zhu, H. Equivalent discrete fracture networks for modelling fluid flow in highly fractured rock mass. Eng. Geol. 2017, 229, 21–30. [Google Scholar] [CrossRef]
- Sonntag, A.; Wagner, A.; Ehlers, W. Dynamic hydraulic fracturing in partially saturated porous media. Comput. Methods Appl. Mech. Eng. 2023, 414, 116121. [Google Scholar] [CrossRef]
- Figueiredo, B.; Tsang, C.-F.; Rutqvist, J.; Niemi, A. The effects of nearby fractures on hydraulically induced fracture propagation and permeability changes. Eng. Geol. 2017, 228, 197–213. [Google Scholar] [CrossRef]
- Ingraffea, A.R.; Saouma, V.E. Numerical modeling of discrete crack propagation in reinforced and plain concrete. In Fracture Mechanics of Concrete: Structural Application and Numerical Calculation; Springer: Dordrecht, The Netherlands, 1985; pp. 171–225. [Google Scholar]
- Griffith, A.A. The Phenomena of Rupture and Flow in Solids. Philos. Trans. R. Soc. Lond. Ser. A Contain. Pap. A Math. Or Phys. Character 1921, 221, 163–198. [Google Scholar]
- Irwin, G.R. Analysis of Stresses and Strains Near the End of a Crack Traversing a Plate. J. Appl. Mech. 2021, 24, 361–364. [Google Scholar] [CrossRef]
- Barenblatt, G.I. The Mathematical Theory of Equilibrium Cracks in Brittle Fracture. In Advances in Applied Mechanics; Dryden, H.L., Von Kármán, T., Kuerti, G., Eds.; Elsevier: Amsterdam, The Netherlands, 1962; pp. 55–129. [Google Scholar]
- Moës, N.; Belytschko, T. Extended finite element method for cohesive crack growth. Eng. Fract. Mech. 2002, 69, 813–833. [Google Scholar] [CrossRef]
- Belytschko, T.; Lin, J.I. A three-dimensional impact-penetration algorithm with erosion. Int. J. Impact Eng. 1987, 5, 111–127. [Google Scholar] [CrossRef]
- Uddin, M.; Kamran, A.A. A localized transform-based meshless method for solving time fractional wave-diffusion equation. Eng. Anal. Bound. Elem. 2018, 92, 108–113. [Google Scholar] [CrossRef]
- Fries, T.P.; Belytschko, T. The extended/generalized finite element method: An overview of the method and its applications. Int. J. Numer. Methods Eng. 2010, 84, 253–304. [Google Scholar] [CrossRef]
- Cong, Z.; Li, Y.; Liu, Y.; Xiao, Y. A new method for calculating the direction of fracture propagation by stress numerical search based on the displacement discontinuity method. Comput. Geotech. 2021, 140, 104482. [Google Scholar] [CrossRef]
- Peerlings, R.H.; de Borst, R.; Brekelmans, W.A.M.; Geers, M.G. Gradient-enhanced damage modelling of concrete fracture. Mech. Cohesive-Frict. Mater. Int. J. Exp. Model. Comput. Mater. Struct. 1998, 3, 323–342. [Google Scholar] [CrossRef]
- Zhou, S.; Zhuang, X.; Zhu, H.; Rabczuk, T. Phase field modelling of crack propagation, branching and coalescence in rocks. Theor. Appl. Fract. Mech. 2018, 96, 174–192. [Google Scholar] [CrossRef]
- Kar, S.; Chaudhuri, A.; Singh, A.; Pal, S. Phase field method to model hydraulic fracturing in saturated porous reservoir with natural fractures. Eng. Fract. Mech. 2023, 286, 109289. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, Y.; Katterbauer, K.; Al Shehri, A.; Sun, S.; Hoteit, I. Deep learning–assisted phase equilibrium analysis for producing natural hydrogen. Int. J. Hydrog. Energy 2024, 50, 473–486. [Google Scholar] [CrossRef]
- Li, Y.; Peng, G.; Tang, J.; Zhang, J.; Zhao, W.; Liu, B.; Pan, Y. Thermo-hydro-mechanical coupling simulation for fracture propagation in CO2 fracturing based on phase-field model. Energy 2023, 284, 128629. [Google Scholar] [CrossRef]
- Borden, M.J.; Verhoosel, C.V.; Scott, M.A.; Hughes, T.J.; Landis, C.M. A phase-field description of dynamic brittle fracture. Comput. Methods Appl. Mech. Eng. 2012, 217, 77–95. [Google Scholar] [CrossRef]
- Hofacker, M.; Miehe, C. A phase field model of dynamic fracture: Robust field updates for the analysis of complex crack patterns. Int. J. Numer. Methods Eng. 2013, 93, 276–301. [Google Scholar] [CrossRef]
- Lo, Y.-S.; Hughes, T.J.R.; Landis, C.M. Phase-field fracture modeling for large structures. J. Mech. Phys. Solids 2023, 171, 105118. [Google Scholar] [CrossRef]
- Zhou, S.; Zhuang, X.; Rabczuk, T. A phase-field modeling approach of fracture propagation in poroelastic media. Eng. Geol. 2018, 240, 189–203. [Google Scholar] [CrossRef]
- Zhou, S.; Zhuang, X.; Rabczuk, T. Phase field method for quasi-static hydro-fracture in porous media under stress boundary condition considering the effect of initial stress field. Theor. Appl. Fract. Mech. 2020, 107, 102523. [Google Scholar] [CrossRef]
- Miehe, C.; Hofacker, M.; Welschinger, F. A phase field model for rate-independent crack propagation: Robust algorithmic implementation based on operator splits. Comput. Methods Appl. Mech. Eng. 2010, 199, 2765–2778. [Google Scholar] [CrossRef]
- Yang, G.; Yang, L.; Liu, Z.; Li, H.; Zhang, J.; Lian, H. Phase field simulation of hydrogen-assisted cracking with length-scale insensitive degradation function. Comput. Mater. Sci. 2023, 228, 112309. [Google Scholar] [CrossRef]
- Zhou, S.; Rabczuk, T.; Zhuang, X. Phase field modeling of quasi-static and dynamic crack propagation: COMSOL implementation and case studies. Adv. Eng. Softw. 2018, 122, 31–49. [Google Scholar] [CrossRef]
- Francfort, G.A.; Marigo, J.J. Revisiting brittle fracture as an energy minimization problem. J. Mech. Phys. Solids 1998, 46, 1319–1342. [Google Scholar] [CrossRef]
- Shiozawa, S.; Lee, S.; Wheeler, M.F. The effect of stress boundary conditions on fluid-driven fracture propagation in porous media using a phase-field modeling approach. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 1316–1340. [Google Scholar] [CrossRef]
- Liu, Z.; Ren, X.; Lin, X.; Lian, H.; Yang, L.; Yang, J. Effects of confining stresses, pre-crack inclination angles and injection rates: Observations from large-scale true triaxial and hydraulic fracturing tests in laboratory. Rock Mech. Rock Eng. 2020, 53, 1991–2000. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 23.08 GPa | 500 N/m | ||
| Value varies with s | 0.4 | ||
| 1.0 | 1 × 103 kg/m3 | ||
| 0 kg/(m3s) | 8.344 × 10−4 m2 | ||
| 1 × 10−15 m2 | 1 × 10−15 1/Pa | ||
| 1 × 10−8 1/Pa | 1 × 10−3 Pas | ||
| 1 × 10−3 Pas | 34.62 GPa | ||
| k | 1 × 10−9 | 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Ma, Y.; Yang, G.; Liu, Z.; Kang, K.; Zhang, M.; Wang, Z. Phase Field Modeling of Hydraulic Fracturing with Length-Scale Insensitive Degradation Functions. Energies 2024, 17, 5210. https://doi.org/10.3390/en17205210
Yang L, Ma Y, Yang G, Liu Z, Kang K, Zhang M, Wang Z. Phase Field Modeling of Hydraulic Fracturing with Length-Scale Insensitive Degradation Functions. Energies. 2024; 17(20):5210. https://doi.org/10.3390/en17205210
Chicago/Turabian StyleYang, Lusheng, Yujing Ma, Gengyin Yang, Zhenghe Liu, Kai Kang, Mengxi Zhang, and Zhiyong Wang. 2024. "Phase Field Modeling of Hydraulic Fracturing with Length-Scale Insensitive Degradation Functions" Energies 17, no. 20: 5210. https://doi.org/10.3390/en17205210
APA StyleYang, L., Ma, Y., Yang, G., Liu, Z., Kang, K., Zhang, M., & Wang, Z. (2024). Phase Field Modeling of Hydraulic Fracturing with Length-Scale Insensitive Degradation Functions. Energies, 17(20), 5210. https://doi.org/10.3390/en17205210