
The Problem of Power Variations in Wind Turbines Operating under Variable Wind Speeds over Time and the Need for Wind Energy Storage Systems




Abstract
1. Introduction
2. Maximum Capture of Wind Energy and the Need for Its Storage
- With time-varying wind speeds, the electrical power provided by wind systems in the national energy system is variable, depending on the wind speed;
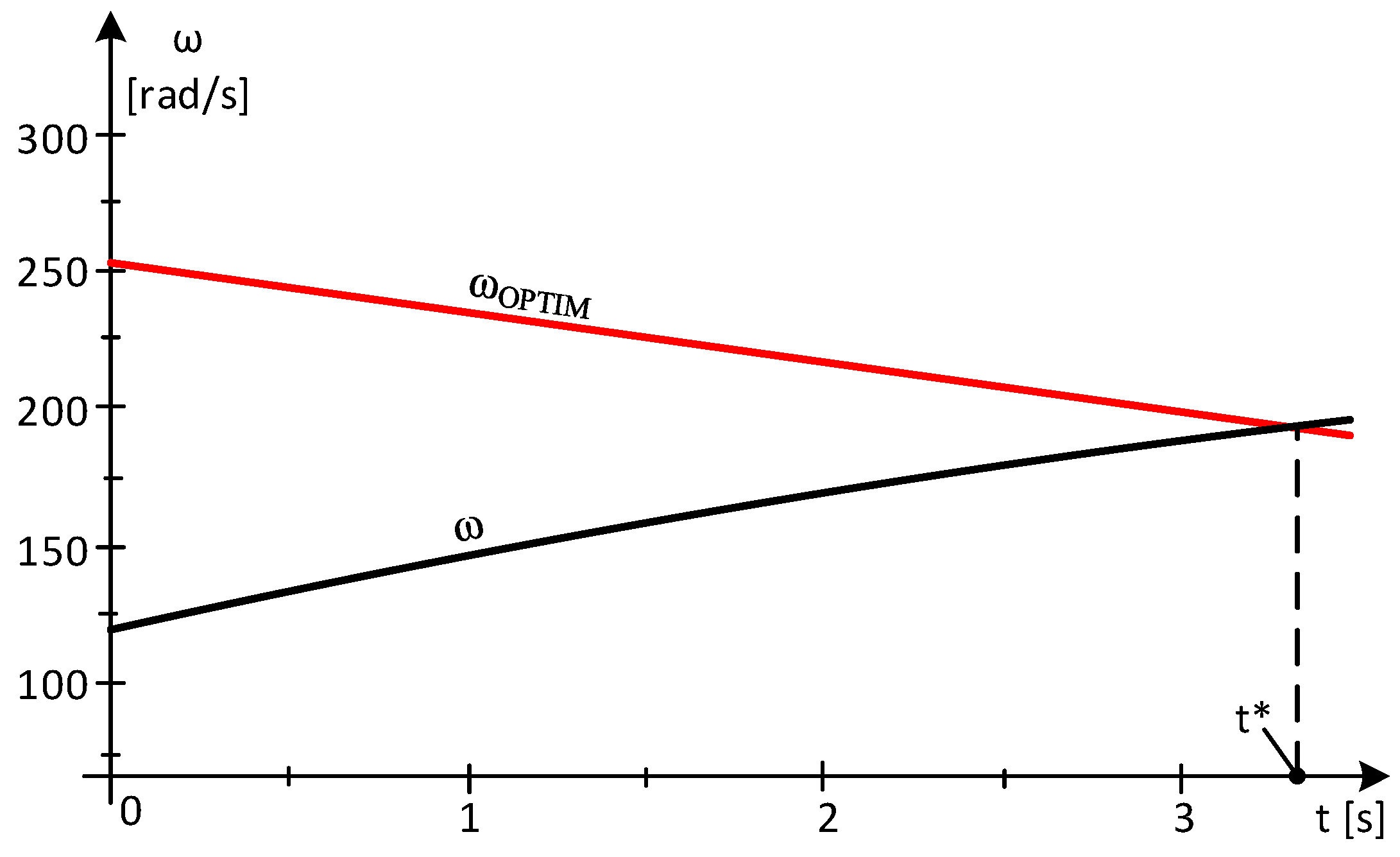
- Due to the high-value equivalent moment of inertia, J, it is necessary to adjust the power of the electric generator in order to ensure that the mechanical angular speed, ω, equals the ωOPTIM, in order to achieve an operation of the WT at the maximum power point and at time-varying wind speeds, in addition to the significantly time-varying WT power [23,24]:
- 3.
- When a WT operates at its maximum power point, electric power fluctuations are produced by:
- The power generated by WTs is directly proportional to the cube of the wind speed;
- Inertial power, PINERTIAL, is dependent on the wind speed and its derivative:
- The operation of the electrical system is not affected;
- Compensation for the fluctuations in wind energy is attained at a local or regional level;
- The discrepancy between the need for grid power and the generation of wind power has been resolved;
- At the local level, collaborative coordination allows for the planning of electricity distribution and expansion in isolated systems;
- It is possible to create a flexible electricity source by harnessing short-term kinetic energy and long-term hydroelectric potential energy.
e−41.495·[(10.47 − 0.732·t)/ω]·[(10.47 − 0.732·t)3
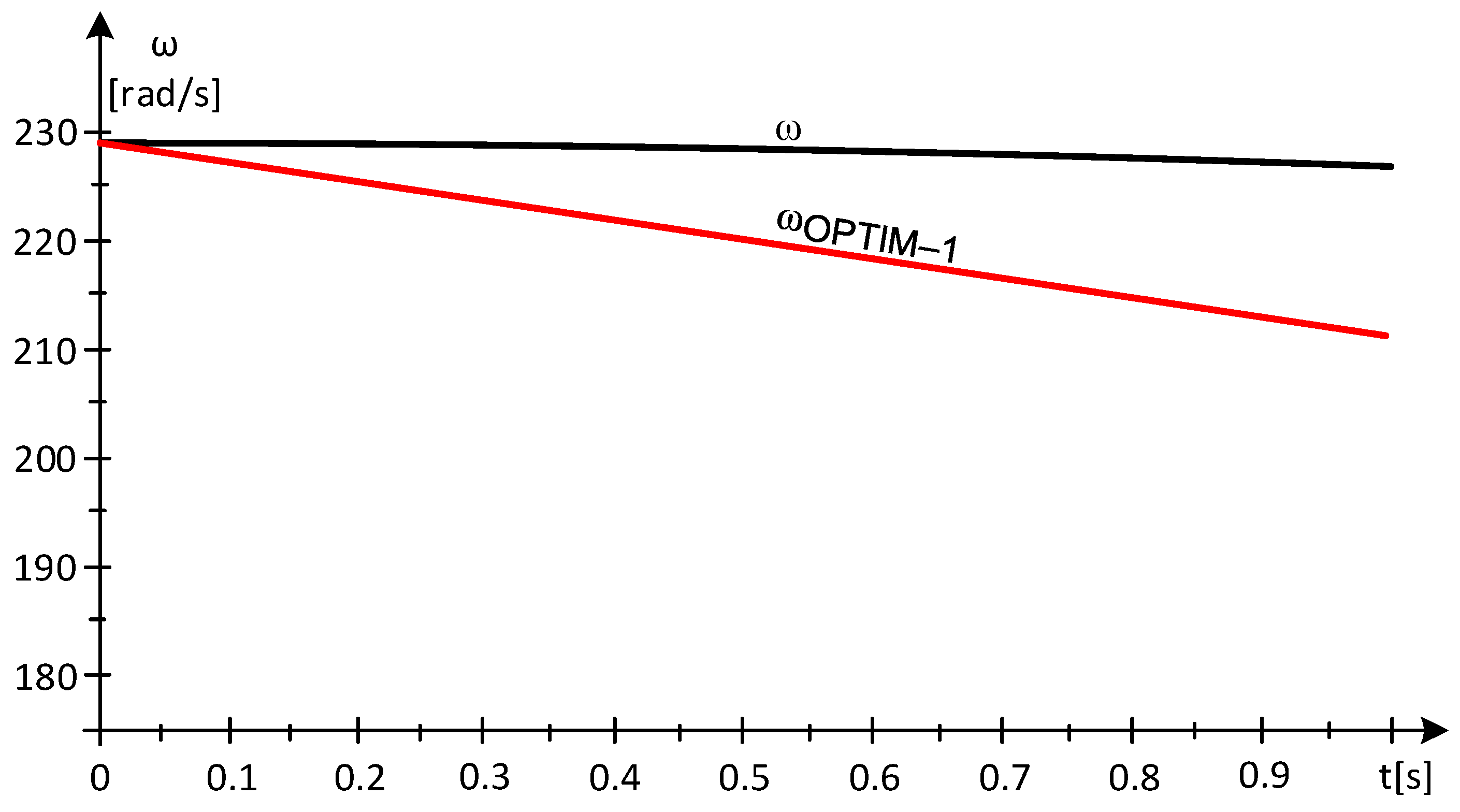
2.1. Maximizing the Power Output of a Wind Turbine by Aligning It with the Maximum Power Point
- Disconnecting the EG from the grid (a slower approach);
- Switching to motor operation of the electric generator (a quicker approach).
24.046·(10.47 − 0.732·3.3) = 197.67 [rad/s]
2.2. Maintaining the Wind System in the Turbine Maximum Power Point
= 2792.8·v3 − 2.96·105·(dv/dt)·v
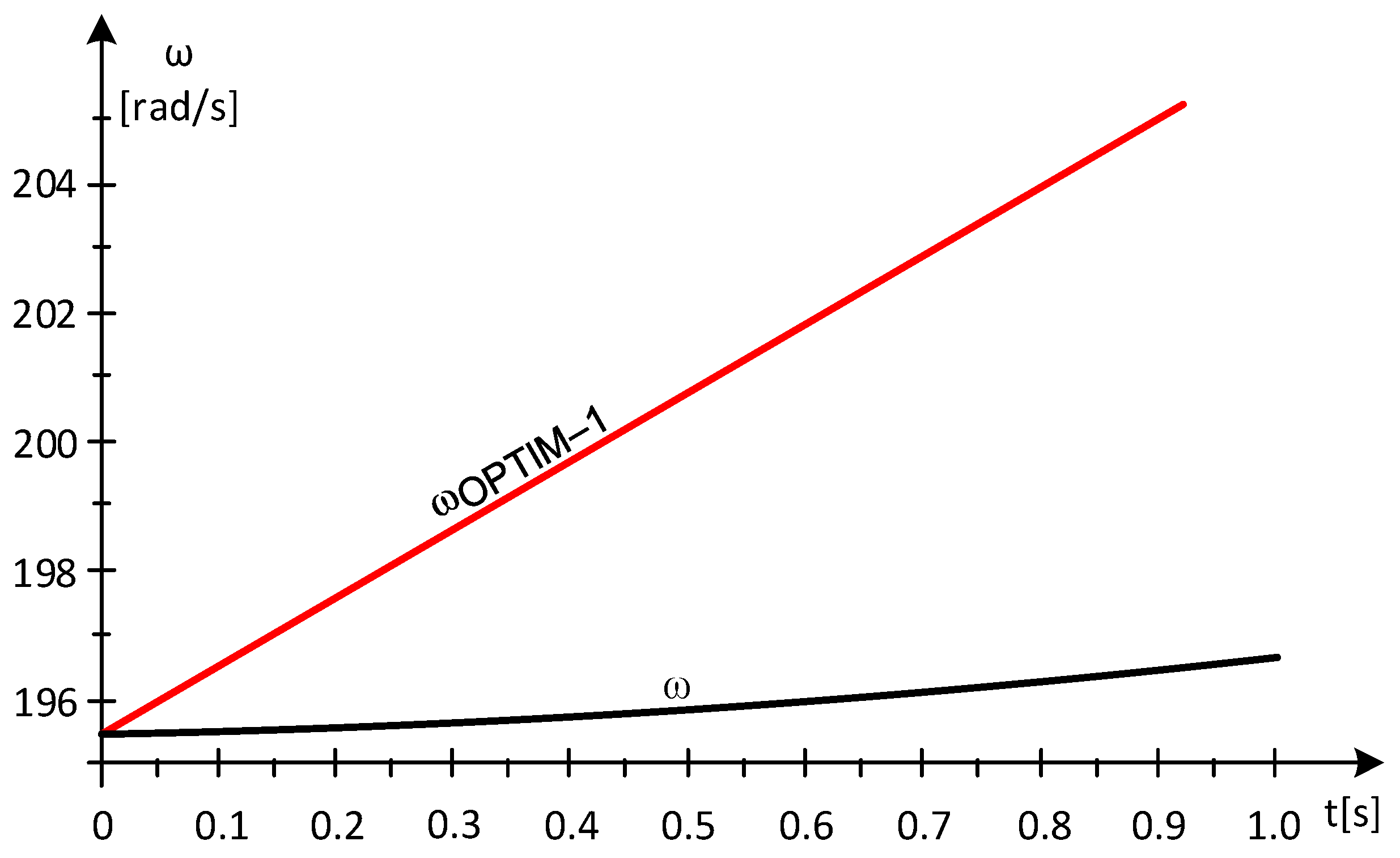
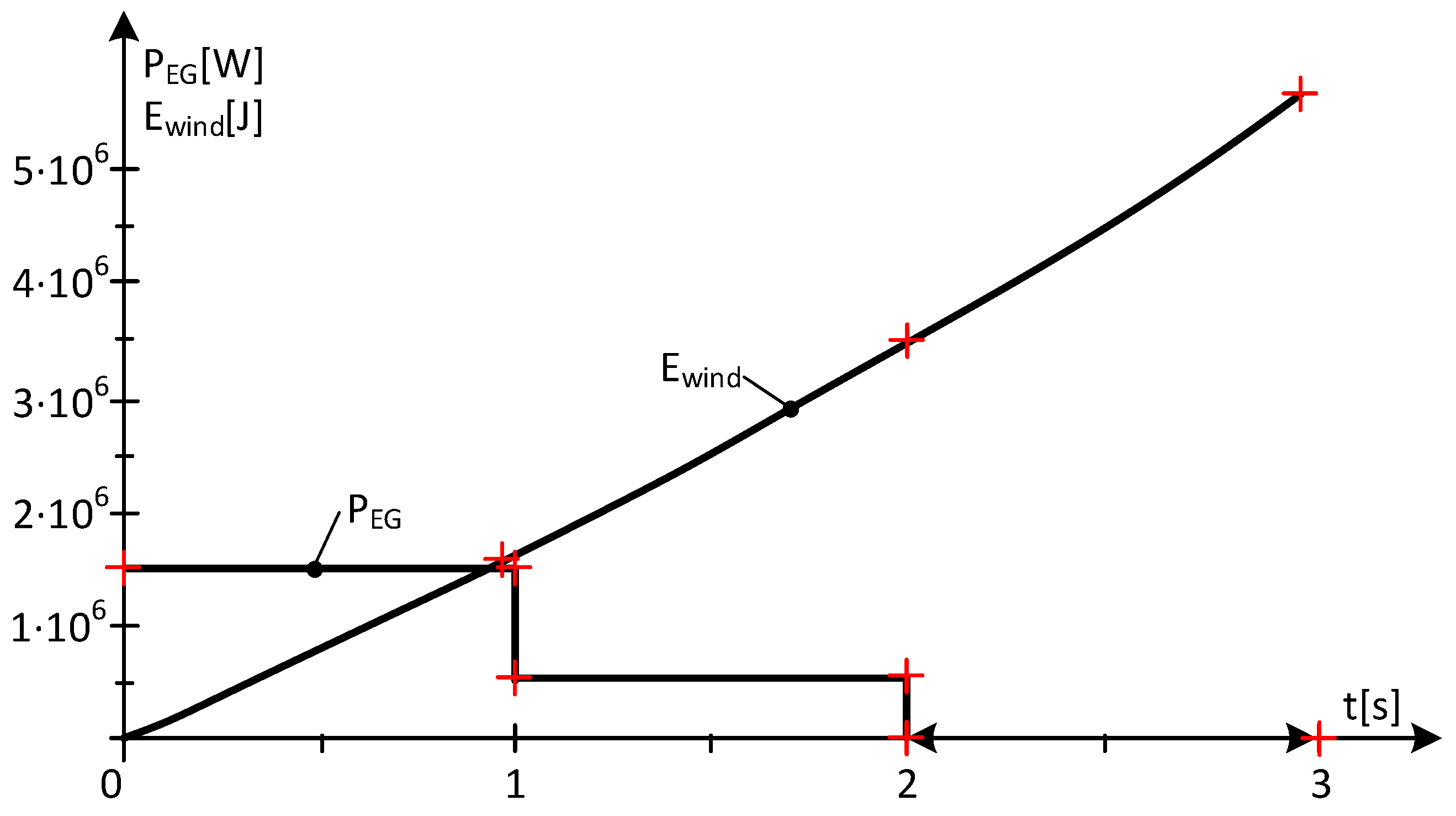
2.3. Time Intervals When Wind Speed Increases and Power Gaps Occur
Case Study 1—The Appearance of Power Gaps
- Subinterval 1—at a sampling rate of 1s, at t* = 1 s, the wind speed value results in:
= 511.92·[(205.94)2 − (196.71)2]/2 = 9.5126·105 [W]
= 1.5008·106 − 9.5126·105 = 5.4954·105 [W]
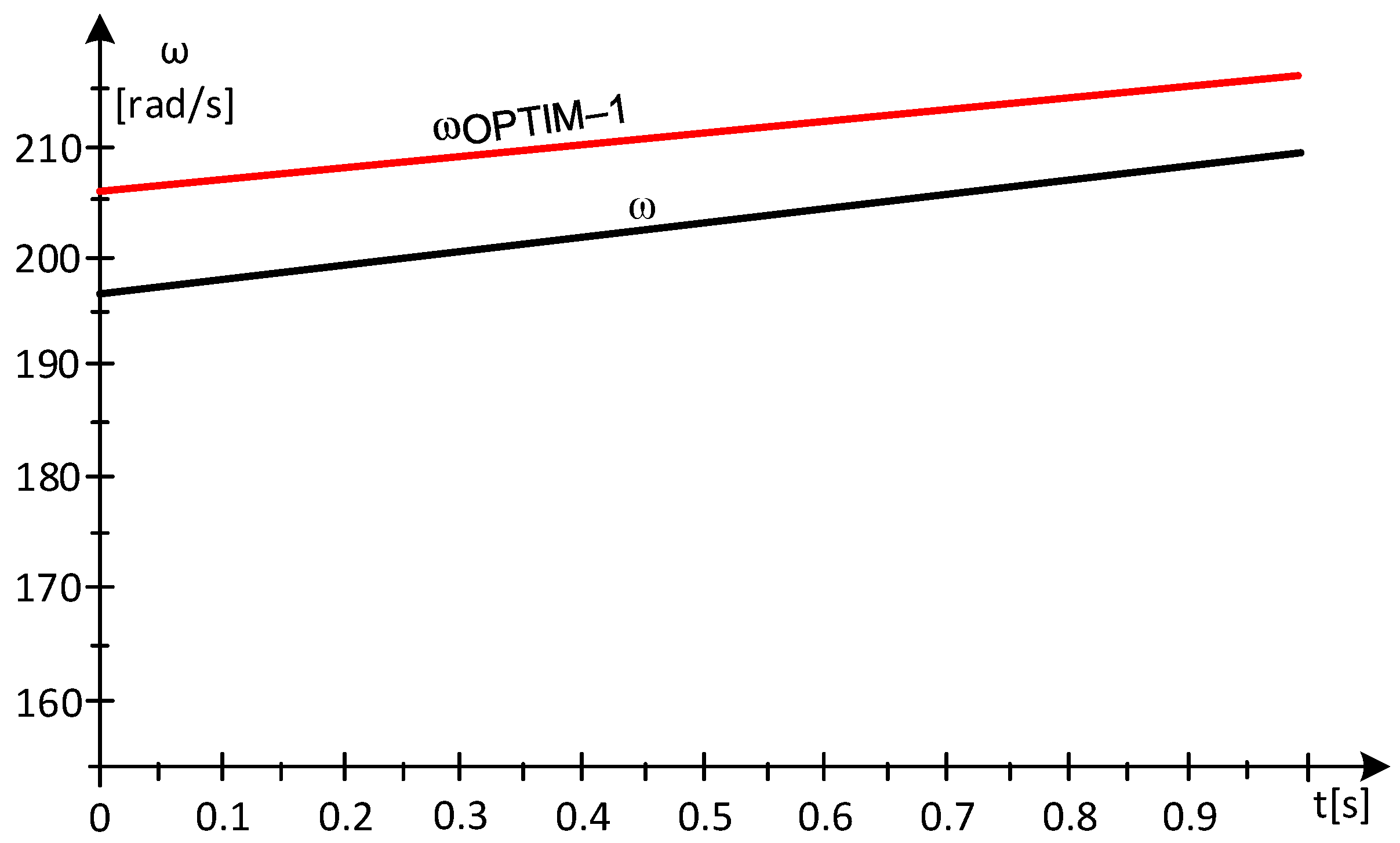
- Subinterval 2, at t = 2 [s], the value of the wind speed is:
= 511.92·[(216.4)2 − (209.58)2]/2 = 7.4361·105 [W]
= 5.4954·105 − 7.4361·105 = −1.9407·105 [W] < 0
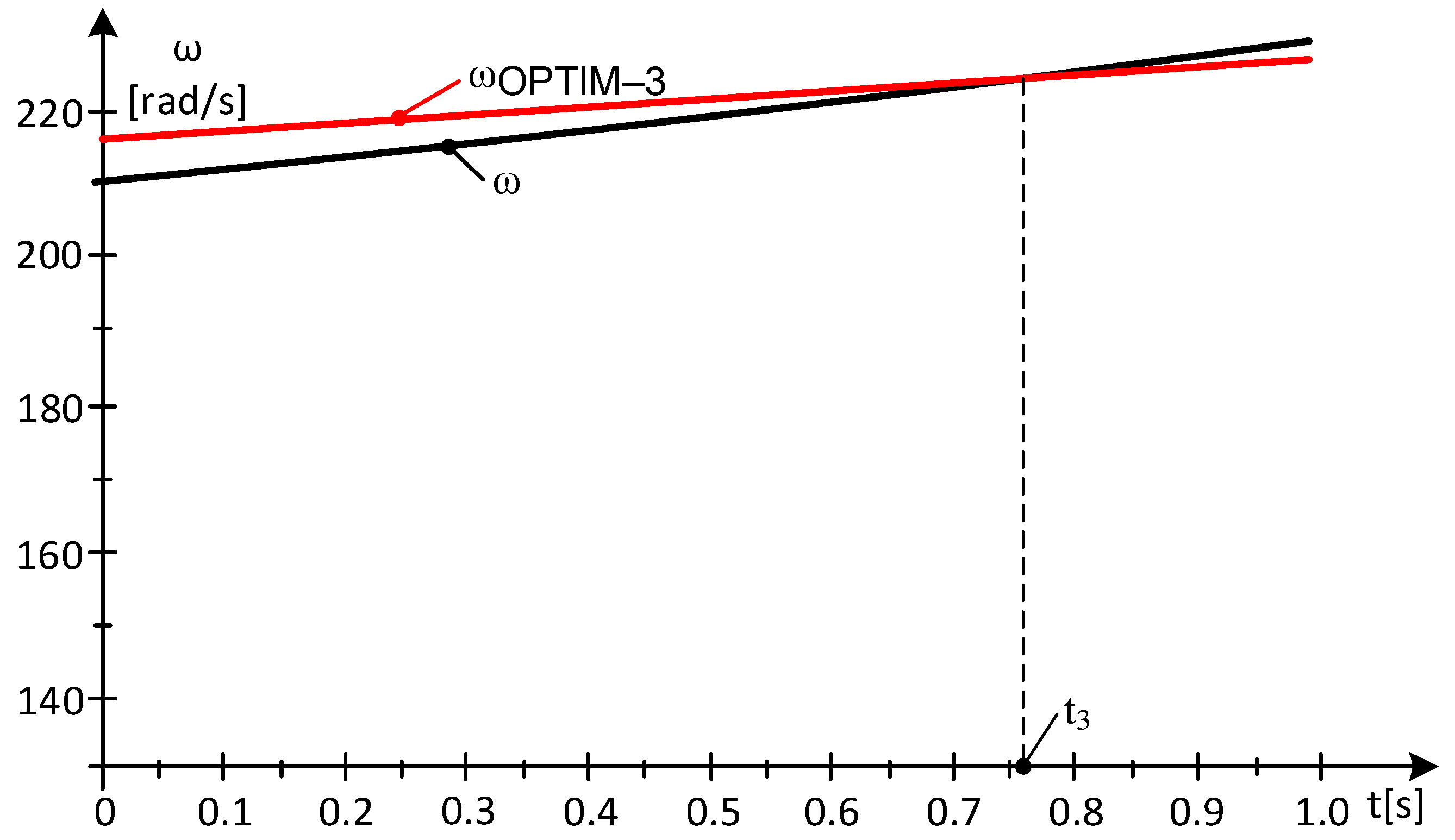
- Subinterval 3, with the power value at the EG being negative on subinterval 3, it discharges. So, P**EG-3 = 0.
- The values of the injected electricity, Electrical, decrease (power at the generator decreases);
- The differences in the values of the kinetic energies ∆Ekinetic increase and compensate for the decrease in the injected electricity;
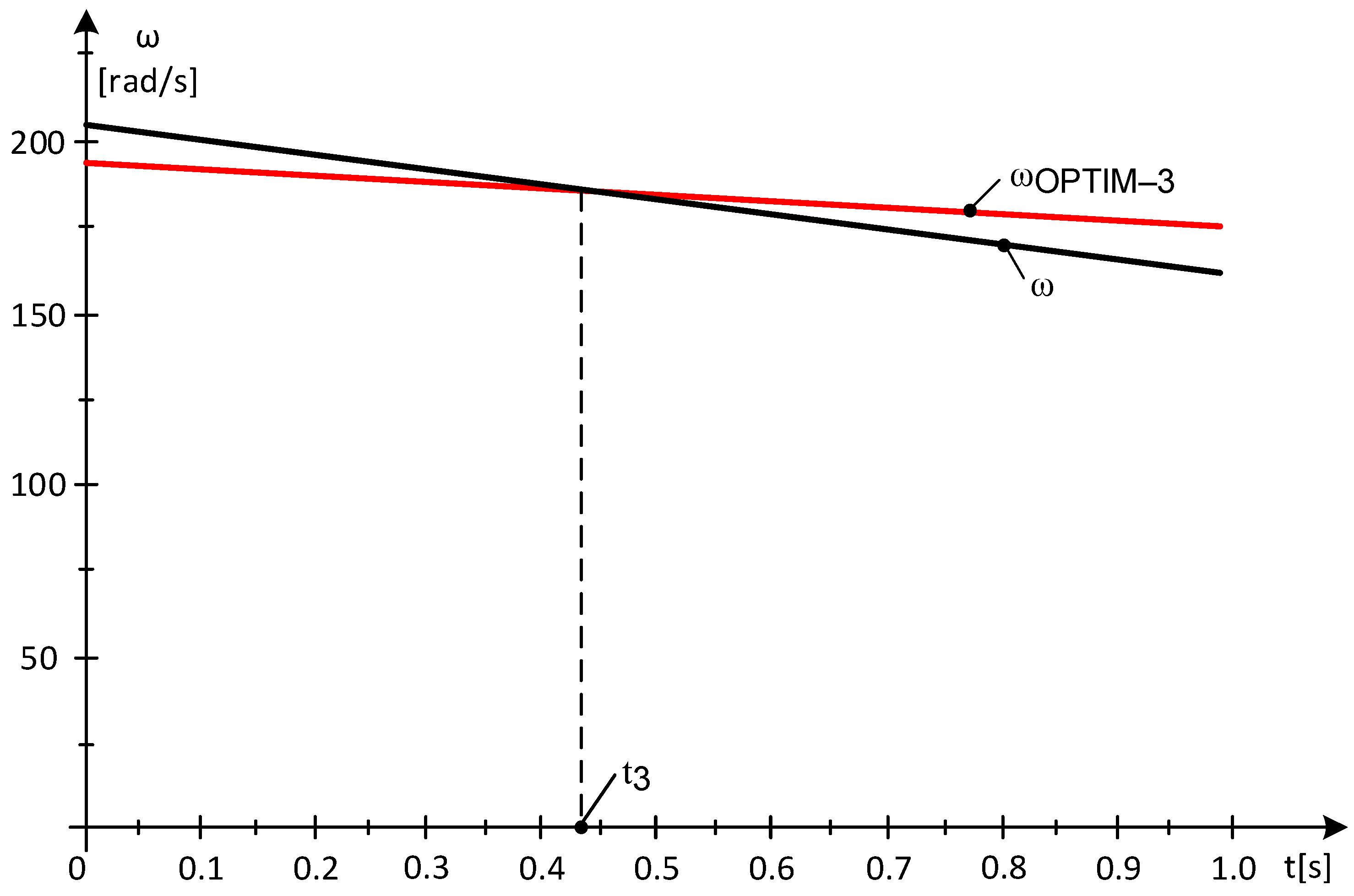
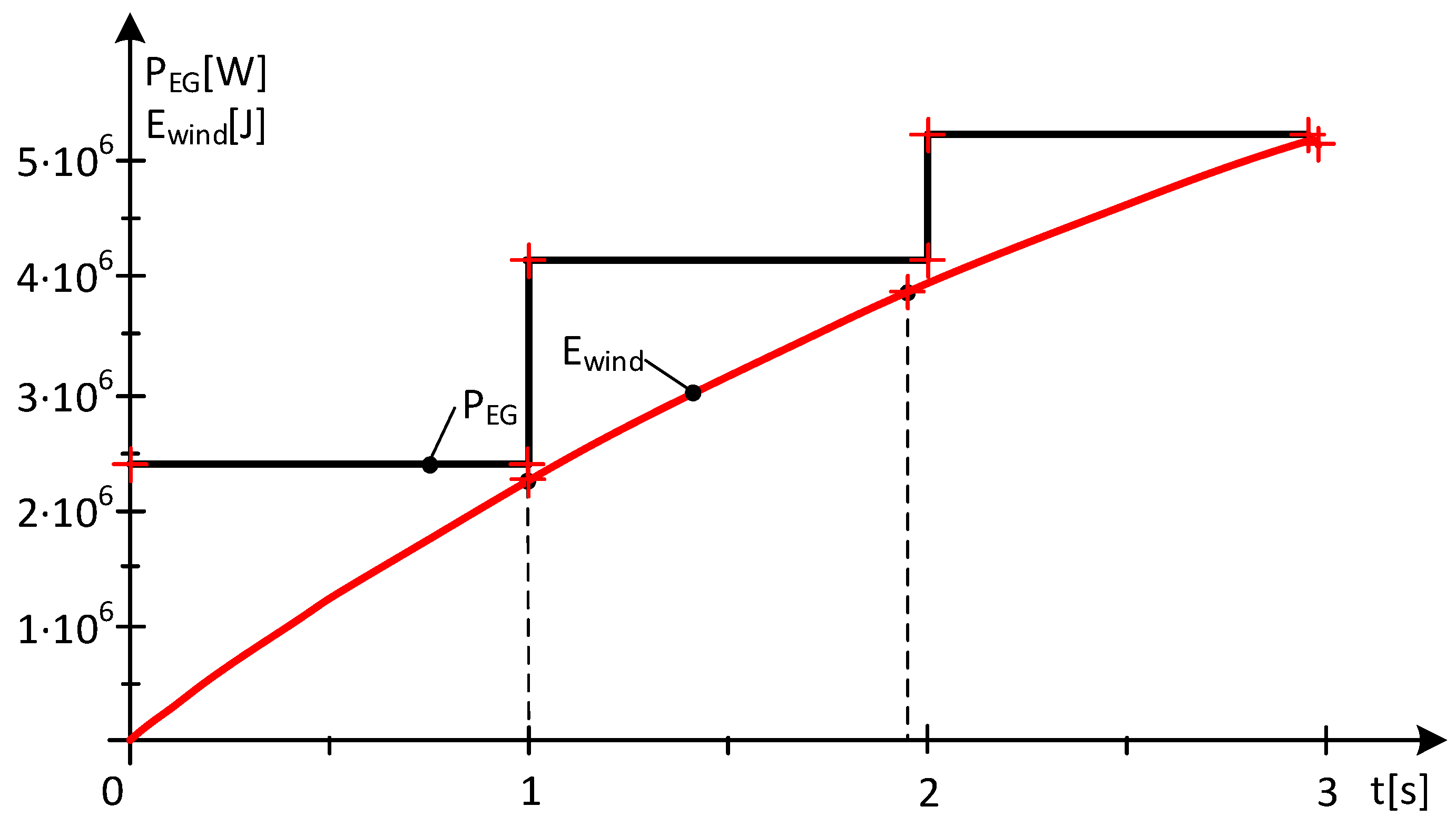
2.4. Time Intervals in Which the Wind Speed Decreases
Case Study 2—MPP Area at Decreasing Wind Speed
- For subinterval 1, with the sampling being 1s, at t* = 1 [s], the wind speed value results in:
- Subrange 2 to t = 2 [s], the wind speed value is:
- Subinterval 3 to t = 3 [s], the wind speed value is:
- The values of the electrical power flow, PEG, increase, although the wind speed decreases;
- The differences in the kinetic energy values ΔEkinetic, in absolute value, increase and compensate for the decrease in the values of the captured wind energies;
- The values of captured wind energies decrease in direct proportion to the decrease in wind speed.
3. Results and Discussion
3.1. Fundamental Aspects
- It has been shown that during time intervals when wind speed increases, the power output in the system decreases if the turbine is operating at the point of maximum power;
- It has been shown that, in the time intervals when the speed decreases, the power debited in the system is higher than the power given by the turbine, which is an advantage for the stability of the energy system;
- It has been demonstrated that the turbine can operate at its maximum power point at any wind speed value, regardless of restrictions, if a wind energy storage system is available;
- Bringing the system to the point of maximum turbine power is achieved in the shortest time by decoupling EG from the grid or switching EG to engine mode;
- By estimating the difference between the optimal mechanical angular velocity and the current mechanical angular velocity, one can prescribe the power value at the generator;
- The operation of the WT at the MPP is ensured by the correlation of the EG power with the wind speed and its variation;
- During periods when wind speed increases, power gaps occur (disconnect the generator from the mains) if operation in the energy-optimal area is required;
- During periods when wind speed decreases, no power gaps occur, although operation in the energy optimal zone is required.
3.2. Discussion
- The method presented lays the foundation for a control that takes into account wind speed and mechanical angular speed;
- The system shall be brought to the point of maximum power by calculating the values of the variations in the kinetic energies of the rotating masses, values obtained by measurements;
- At increasing wind speeds over time, power gaps occur under conditions where operation at the maximum power point is required;
- At decreasing wind speeds over time, no power gaps occur, although operation is required at the maximum power point and the electrical power debited into the system is greater than the power given by the turbine, the surplus power coming from the various kinetic energies of the rotating masses.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbol/Abbreviation | Meaning |
| WT | wind turbine |
| MPP | maximum power point |
| MAS | mechanical angular speed |
| EG | electric generator |
| PEG | power at the electric generator |
| PWT | power of wind turbine |
| v | wind speed |
| J | inertia moment |
| n | rotational speed |
| ω | mechanical angular speed |
| ωOPTIM | optimum mechanical angular speed |
| nOPTIM | optimum rotational speed |
| kv | proportionality factor |
| PINERTIAL | inertial power |
| ρ | air density in the wind turbine |
| Rp | rotor blade radius |
| Cp(λ) | power conversion coefficient |
| MWT | moment related to the shaft of the electric generator |
| MEG | electromagnetic torque at the electric generator |
| kp | the proportionality factor for power |
| Ewind | wind energy |
| Eelectrical | electrical energy |
| ΔEkinetic | kinetic energy of the masses in rotational motion |
| NPS | National Power System |
References
- Adebiyi, A.A.; Moloi, K. Renewable Energy Source Utilization Progress in South Africa: A Review. Energies 2024, 17, 3487. [Google Scholar] [CrossRef]
- Kaczmarczyk, B.; Lis, K.; Bogucka, A. Renewable Energy Management in European Union Member States. Energies 2023, 16, 5863. [Google Scholar] [CrossRef]
- Früh, W.G. Assessing the Performance of Small Wind Energy Systems Using Regional Weather Data. Energies 2023, 16, 3500. [Google Scholar] [CrossRef]
- Guo, D.; Piao, Z.L.; Wang, L.D.; Wang, J.; Lv, Q.Q.; Cao, D.X. The research on the integration of energy storage and generating wind turbine system model. In Proceedings of the China International Conference on Electricity Distribution (CICED), Xi’an, China, 10–13 August 2016. [Google Scholar]
- Thapa, S.; Karki, R. Reliability benefit of energy storage in wind integrated power system operation. IET Gener. Transm. Distrib. 2016, 10, 807–814. [Google Scholar] [CrossRef]
- Roche, N.; Courtney, J. Optimal Sizing of Energy Storage with Embedded Wind Power Generation. In Proceedings of the 55th International Universities Power Engineering Conference (UPEC), Turin, Italy, 1–4 September 2020. [Google Scholar]
- Zhang, H.L.; Liu, J.; Li, W. Optimized Design of Energy-Storage Capacity for Wind Power Generating. In Proceedings of the Asia-Pacific Power and Energy Engineering Conference (APPEEC), Shanghai, China, 27–29 March 2012. [Google Scholar]
- Jamii, J.; Mimouni, F. Model of wind turbine-pumped storage hydro plant. In Proceedings of the 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018. [Google Scholar]
- MONSSON. Available online: https://www.monsson.eu/ (accessed on 3 October 2022).
- Edrah, M.; Zhao, X.; Hung, W.; Qi, P.; Marshall, B.; Karcanias, A.; Baloch, S. Effects of POD Control on a DFIG Wind Turbine Structural System. IEEE Trans. Energy Convers. 2020, 35, 765–774. [Google Scholar] [CrossRef]
- Hussain, J.; Mishra, M.K. An Efficient Wind Speed Computation Method Using Sliding Mode Observers in Wind Energy Conversion System Control Application. IEEE Trans. Ind. Appl. 2020, 56, 730–739. [Google Scholar] [CrossRef]
- Sorandaru, V.; Musuroi, S.; Frigura-Iliasa, F.M.; Vatau, D.; Dordescu, M. Analysis of the Wind System Operation in the Optimal Energetic Area at Variable Wind Speed over Time. Sustainability 2019, 11, 1249. [Google Scholar] [CrossRef]
- Babescu, M. Sisteme automate de reglare. In Maşina Sincronă: Modelare-Identificare-Simulare; Editura Politehnica: Timisoara, Romania, 2003; pp. 154–196. [Google Scholar]
- Papakonstantinou, A.G.; Konstanteas, A.I.; Papathanassiou, S.A. Solutions to Enhance Frequency Regulation in an Island System with Pumped-Hydro Storage Under 100% Renewable Energy Penetration. IEEE Access 2023, 11, 76675–76690. [Google Scholar] [CrossRef]
- Sorandaru, C.; Ancuti, M.-C.; Musuroi, S.; Svoboda, M.; Muller, V.; Erdodi, M.G.; Edu, E.R. Fundamental Issue for Wind Power Systems Operating at Variable Wind Speeds: The Dependence of the Optimal Angular Speed on the Wind Speed. In Proceedings of the 2022 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 20–22 October 2022. [Google Scholar]
- Rebello, E.; Watson, D.; Rodgers, M. Performance Analysis of a 10 MW Wind Farm in Providing Secondary Frequency Regulation: Experimental Aspects. IEEE Trans. Power Syst. 2019, 34, 3090–3097. [Google Scholar] [CrossRef]
- Dobrin, E.; Ancuti, M.-C.; Musuroi, S.; Sorandaru, C.; Ancuti, R.; Lazar, M.A. Dynamics of the Wind Power Plants at Small Wind Speeds. In Proceedings of the IEEE 14th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 21–23 May 2020. [Google Scholar]
- Najih, Y.; Adar, M.; Aboulouard, A.; Khaouch, Z.; Bengourram, M.; Zekraoui, M.; Mabrouki, M. Mechatronic Control Model of a Novel Variable Speed Wind Turbine Concept with Power Splitting Drive Train: A Bond Graph Approach. In Proceedings of the 2020 IEEE 6th International Conference on Optimization and Applications (ICOA), Beni Mellal, Morocco, 20–21 April 2020. [Google Scholar]
- Vadi, S.; Gürbüz, F.B.; Bayindir, R.; Hossain, E. Design and Simulation of a Grid Connected Wind Turbine with Permanent Magnet Synchronous Generator. In Proceedings of the 8th International Conference on Smart Grid (icSmartGrid), Paris, France, 17–19 June 2020. [Google Scholar]
- Yingyu, A.; Li, Y.; Zhang, J.; Wang, T.; Liu, C. Enhanced Frequency Regulation Strategy for Wind Turbines Based on Over-speed De-loading Control. In Proceedings of the 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020. [Google Scholar]
- Chioncel, C.P.; Erdodi, G.M.; Petrescu, D.I.; Elisabeta, S.; Gillich, N. Control of Wind Power Systems Imposing the Current in the Intermediate Circuit of the Converter at Variable Wind Speed. In Proceedings of the 9th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 7–9 May 2015. [Google Scholar]
- Sorandaru, C.; Musuroi, S.; Ancuti, M.C.; Erdodi, G.M.; Petrescu, D.I. The Control of the Wind Power Systems by Imposing the DC Current. In Proceedings of the 10th Jubilee IEEE International Symposium on Applied Computational Intelligence and Informatics, Timisoara, Romania, 21–23 May 2015. [Google Scholar]
- Ye, H.; Ding, Y.; Xiao, L.; Li, Q.; Zheng, C.; Wang, Y. Hydro-Tower Pumped Storage-based Wind Power Generator: Short-term Dynamics and Controls. In Proceedings of the 2nd Asian Conference on Frontiers of Power and Energy (ACFPE), Chengdu, China, 20–22 October 2023. [Google Scholar]
- Huynh, P.; Tungare, S.; Banerjee, A. Maximum Power Point Tracking for Wind Turbine Using Integrated Generator–Rectifier Systems. IEEE Trans. Power Electron. 2020, 36, 504–512. [Google Scholar] [CrossRef]
- Carstea, C.; Butaru, F.; Ancuti, M.-C.; Musuroi, S.; Deacu, A.; Babaita, M.; Stanciu, A.M. Wind Power Plants Operation at Variable Wind Speeds. In Proceedings of the 14th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 21–23 May 2020. [Google Scholar]
- Deng, X.; Yang, J.; Sun, Y.; Dongran, S.; Yang, Y.; Joo, Y.H. An Effective Wind Speed Estimation Based Extended Optimal Torque Control for Maximum Wind Energy Capture. IEEE Access 2020, 8, 65959–65969. [Google Scholar] [CrossRef]
- Karthik, R.; Sri Hari, A.; Pavan Kumar, Y.V.; John Pradeep, D. Modelling and Control Design for Variable Speed Wind Turbine Energy System. In Proceedings of the 2020 International Conference on Artificial Intelligence and Signal Processing (AISP), Amaravati, India, 10–12 January 2020. [Google Scholar]
- Fan, X.; Crisostomi, E.; Zhang, B.; Thomopulos, D. Rotor Speed Fluctuation Analysis for Rapid De-Loading of Variable Speed Wind Turbines. In Proceedings of the 2020 IEEE 20th Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020. [Google Scholar]
- Ma, Y.; Zhang, L.; Yan, J.D.; Guo, Z.; Li, Q.; Fang, Z.; Siew, W.H. Inception mechanism of lightning upward leader from the wind turbine blade and a proposed critical length criterion. Proc. Chin. Soc. Electr. Eng. 2016, 36, 5975–5982. [Google Scholar]
- Yokoyama, S.; Yasuda, Y.; Masayuki, M.; Sekioka, S.; Yamamoto Member, K.; Honjo, N.; Sato, T. Clarification of the mechanism of wind turbine blade damage taking lightning characteristics into consideration and relevant research project. In Proceedings of the 2012 International Conference on Lightning Protection (ICLP), Vienna, Austria, 2–7 September 2012. [Google Scholar]
- Xingjia, Y.; Yingming, L.; Jieqiu, B.; Zuoxia, X. Research and simulation of direct drive wind turbine VSCF characteristic. In Proceedings of the 2008 IEEE International Conference on Automation and Logistics, Qingdao, China, 1–3 September 2008. [Google Scholar]
- Srinivasa Sudharsan, G.; Vishnupriyan, J.; Vijay Anand, K. Active flow control in Horizontal Axis Wind Turbine using PI-R controllers. In Proceedings of the 6th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 March 2020. [Google Scholar]
- Chioncel, C.P.; Spunei, E.; Tirian, G.O. Visualizing the Maximum Energy Zone of Wind Turbines Operating at Time-Varying Wind Speeds. Sustainability 2024, 16, 2659. [Google Scholar] [CrossRef]
- Chioncel, C.P.; Dordescu, M.; Lazar, M.A.; Tirian, O.G. Wind turbine power and optimum energy, at variable wind speeds. In Proceedings of the 24th IEEE International Conference on Intelligent Engineering Systems (INES), Reykjavík, Iceland, 8–10 July 2020; pp. 197–202. [Google Scholar]
- Ragheb, M.; Ragheb, A.M. Wind Turbines Theory—The Betz Equation and Optimal Rotor Tip Speed Ratio. In Fundamental and Advanced Topics in Wind Power; Carriveau, R., Ed.; IntechOpen: London, UK; University of Windsor: Windsor, ON, Canada, 2011. [Google Scholar]
- Singh, M.; Santoso, S. Dynamic Models for Wind Turbines and Wind Power Plants; University of Texas at Austin: Austin, TX, USA, 2021. [Google Scholar]
- Vestas. Available online: https://www.vestas.com (accessed on 1 September 2024).
- Wei, D.X.; Wang, J.Z.; Li, Z.W.; Wang, R. Wind Power Curve Modeling with Hybrid Copula and Grey Wolf Optimization. IEEE Trans. Sustain. Energy 2022, 13, 265–276. [Google Scholar] [CrossRef]
- Goyal, S.; Maurya, S.K.; Kumar, S.; Agarwal, D. A Consolidation Review of Major Wind Turbine Models in Global Market. In Proceedings of the 2020 International Conference on Power Electronics & IoT Applications in Renewable Energy and Its Control (PARC), Mathura, India, 28–29 February 2020. [Google Scholar]
- Baala, Y.; Bri, S. DFIG-Based Wind Turbine Control Using High-Gain Observer. In Proceedings of the 1st International Conference on Innovative Research in Applied Science, Engineering and Technology (IRASET), Meknes, Morocco, 16–19 April 2020. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time t [s] | Speed v [m/s] | Point |
|---|---|---|
| 0 | 10.47 | A |
| 3.433 | 8.13 | B |
| 6.631 | 9.52 | C |
| Subinterval | Ewind [J] | Ewind-MAX [J] | PEG [W] | ΔEkinetic [J] |
|---|---|---|---|---|
| 1 | 1.6236·106 | 1.6254·106 | 1.5008·106 | 1.2247·105 |
| 2 | 1.8883·106 | 1.8927·106 | 5.4954·106 | 1.3384·106 |
| 3 | 1.1869·106 | 1.1877·106 | 0 | 2.1871·106 |
| Time t [s] | Speed v [m/s] | Point |
|---|---|---|
| 1.198 | 10.47 | A |
| 39.858 | 9.52 | D |
| 43.073 | 7.145 | E |
| Subinterval | Ewind [J] | Ewind-MAX [J] | PEG [W] | ΔEkinetic [J] |
|---|---|---|---|---|
| 1 | 2.1382·106 | 2.1434·106 | 2.4096·106 | −2.7166·105 |
| 2 | 1.6549·106 | 1.6656·106 | 4.1385·106 | −2.4835·106 |
| 3 | 1.2619·106 | 1.2647·106 | 5.224·106 | −3.9624·106 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chioncel, C.P.; Spunei, E.; Tirian, G.-O. The Problem of Power Variations in Wind Turbines Operating under Variable Wind Speeds over Time and the Need for Wind Energy Storage Systems. Energies 2024, 17, 5079. https://doi.org/10.3390/en17205079
Chioncel CP, Spunei E, Tirian G-O. The Problem of Power Variations in Wind Turbines Operating under Variable Wind Speeds over Time and the Need for Wind Energy Storage Systems. Energies. 2024; 17(20):5079. https://doi.org/10.3390/en17205079
Chicago/Turabian StyleChioncel, Cristian Paul, Elisabeta Spunei, and Gelu-Ovidiu Tirian. 2024. "The Problem of Power Variations in Wind Turbines Operating under Variable Wind Speeds over Time and the Need for Wind Energy Storage Systems" Energies 17, no. 20: 5079. https://doi.org/10.3390/en17205079
APA StyleChioncel, C. P., Spunei, E., & Tirian, G.-O. (2024). The Problem of Power Variations in Wind Turbines Operating under Variable Wind Speeds over Time and the Need for Wind Energy Storage Systems. Energies, 17(20), 5079. https://doi.org/10.3390/en17205079