
Zero-Trust Zero-Communication Defence against Hybrid Cyberattacks in Distributed Energy Resources Using Mean Field Reinforcement Leaning


Abstract
1. Introduction
1.1. Summary of Gaps
- The emerging power increase for residential DERs introduces new vulnerabilities to the power grid;
- Current protection algorithms against DLAAs and FDI are not well prepared for a combined hybrid attack. A decentralized zero-trust algorithm that coordinates high-power DERs is desperately needed.
1.2. Contributions and Novelties
- 1.
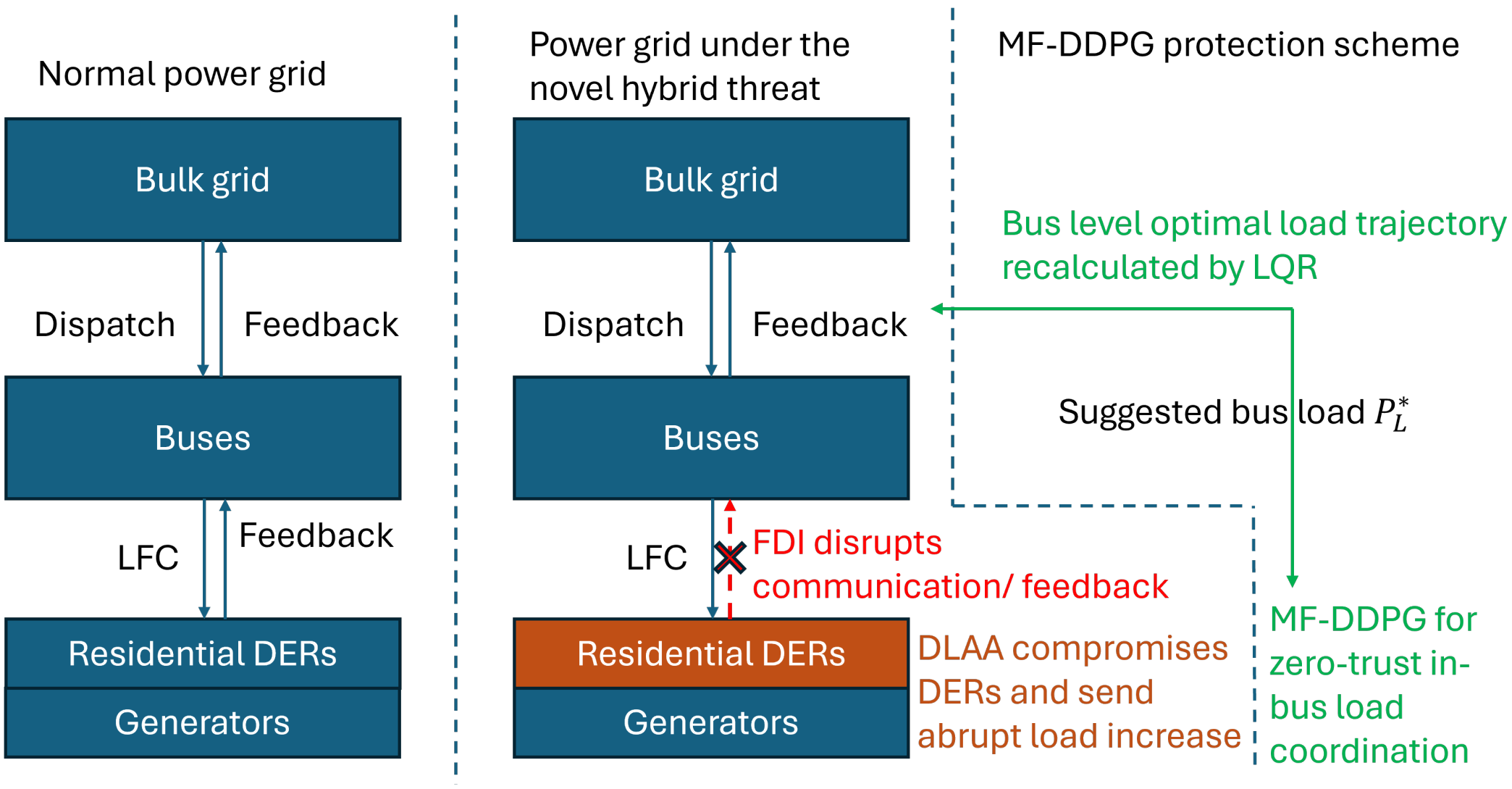
- A novel hybrid type of cyber threat combining FDI and a DLAA against DERs is identified in this paper. Compared with traditional DLAA and FDI attacks, the hybrid DLAA-FDI attack is more realistic since significantly less attacking load is required when the communication of the DERs is disrupted;
- 2.
- To handle the hybrid attack, mean field game theory is leveraged to enable a decentralized coordination of power adjustments among high-power residential DERs in a zero-communication fashion;
- 3.
- Traditional mean field game theory is extended from continuous-time to discrete-time so that it is compatible with a popular and proven successful reinforcement learning algorithm, namely, Deep Deterministic Policy Gradients (DDPG). The developed MF-DDPG algorithm is the first deep reinforcement learning framework to solve discrete-time mean field games online.
2. Hybrid Attack
2.1. Power Flow Modelling
2.2. DLAA and FDI Attack
3. Zero-Trust Defence
3.1. Optimal Load Shedding at the Bus Level
3.2. Optimal Load Shedding within a Bus
- Communication is inhibited between households and the associated substation, rendering data exchange impractical;
- The sheer number of households linked to a single substation introduces substantial computational complexity.
- 1.
- The first objective, which is primarily of interest to utility companies, seeks to ensure that the aggregate power consumption aligns closely with the pre-determined target consumption, . If the total power consumption, denoted as , exceeds , the system risks shutdown due to under frequency. Conversely, would signify an over-frequency scenario. Thus, the performance of this objective is quantified through the minimization problem ;
- 2.
- The second objective arises under the assumption that the system is under attack and the communication system is untrustable. In this context, individual consumers are compelled to vie for a larger share of the limited power supply. The corresponding objective function for each consumer in this competitive scenario is ;
- 3.
- The third objective targets minimal deviation from normal power consumption levels for each household, expressed as , where quantifies the intervention to the consumer’s regular consumption pattern.
3.3. Mean Field Game Formulation
- Decentralized decision-making: the framework is well suited for zero-trust environments, particularly when the conventional data communication systems are compromised;
- Scalability: due to the substantial number of consumers connected to the power grid, computing a centralized solution becomes computationally infeasible, making the decentralized nature of MFG advantageous.
3.4. Mean Field DDPG
| Algorithm 1 Mean Field DDPG. |
|
4. Case Studies
4.1. Case Study for the Hybrid Attack
4.1.1. System Parameters
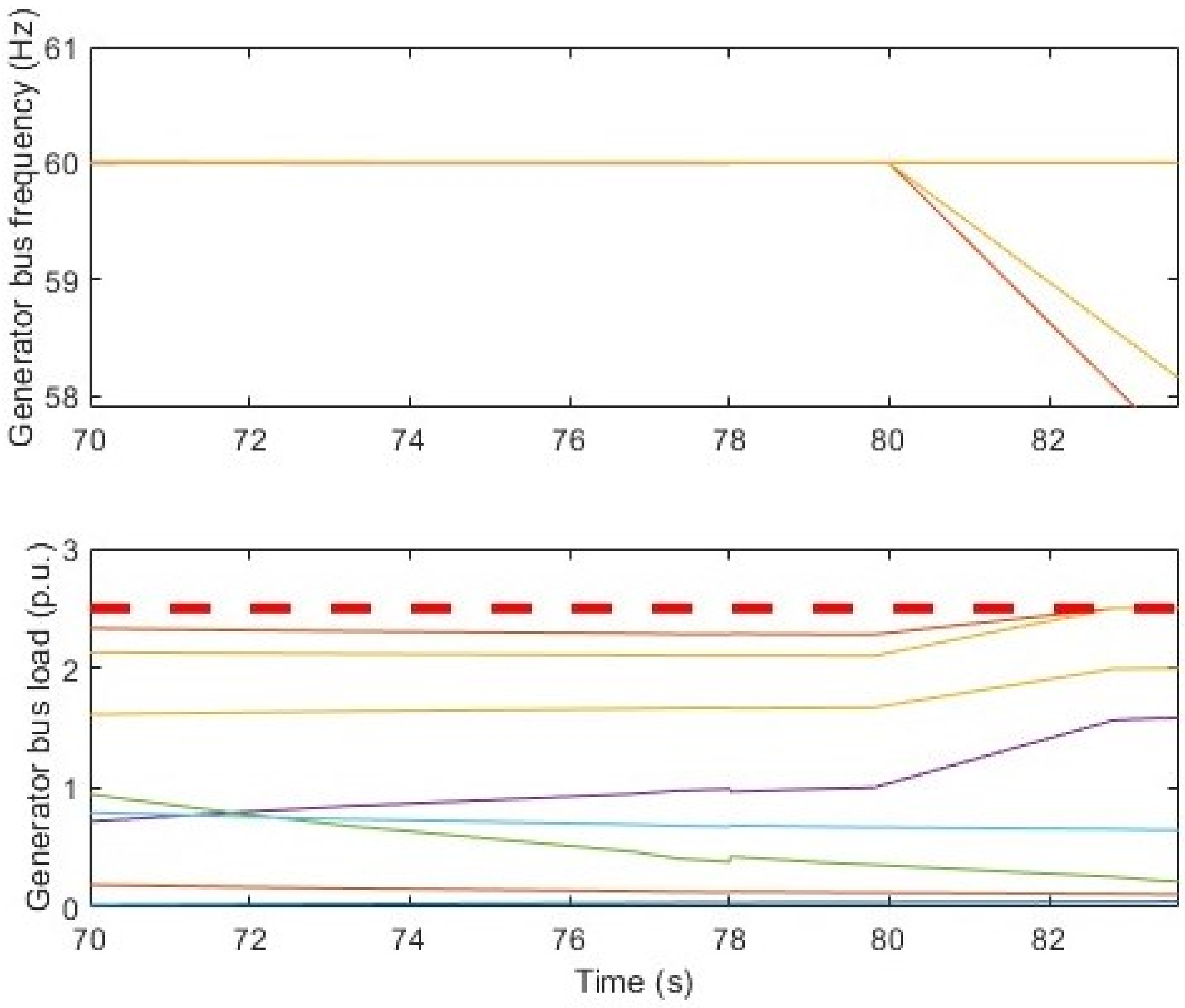
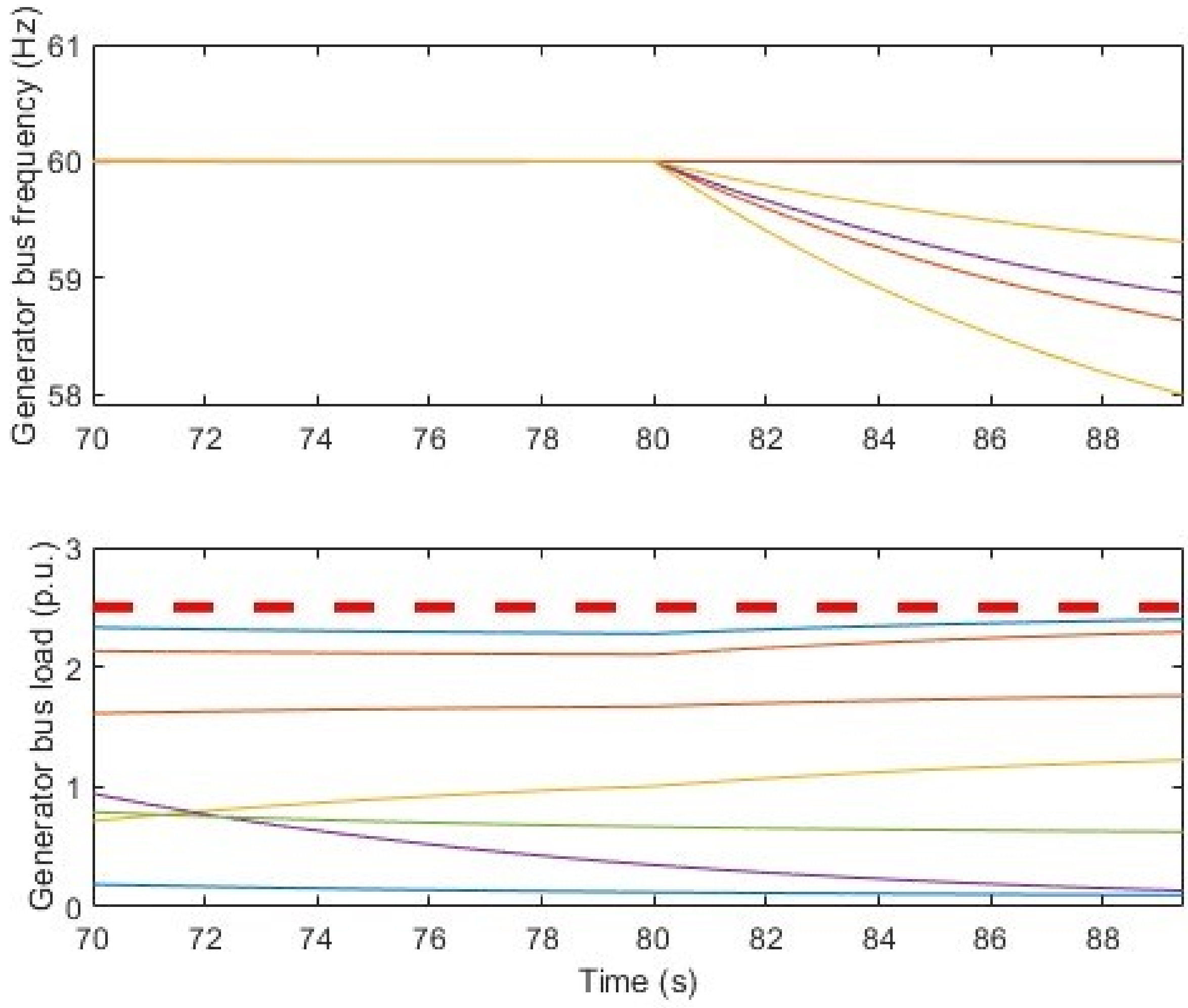
4.1.2. DLAA Attack
4.1.3. Hybrid Attack
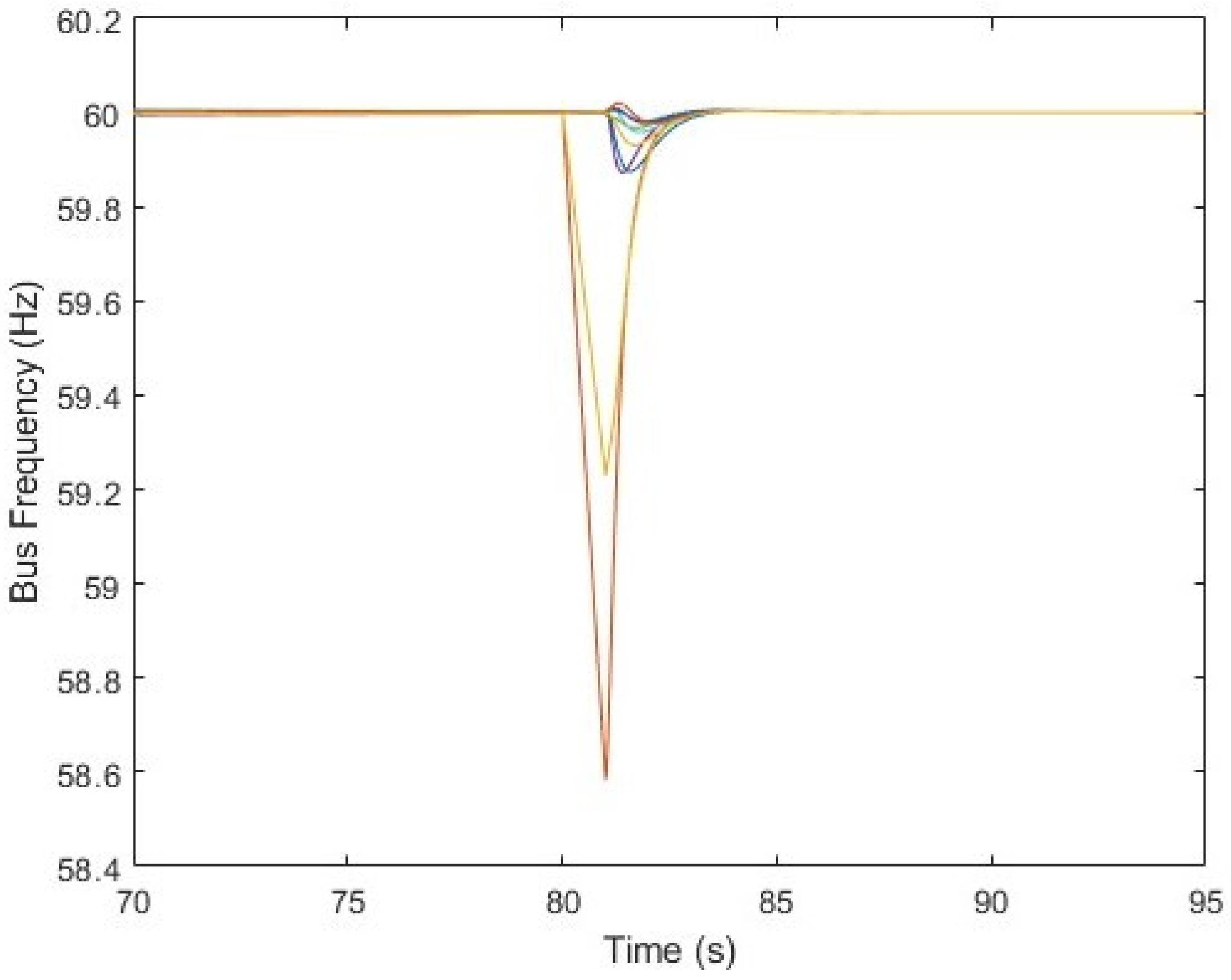
4.2. Case Studies for MF-DDPG Zero-Trust Defence
4.2.1. LQR for Optimal Bus-Level Defence
4.2.2. Decentralized Optimal Load Shedding Using MF-DDPG
4.3. Comparison Discussions
5. Limitations
5.1. Limitations of MFDDPG
5.2. Impacts on the DER Equipment
5.3. Impacts of the Grid Inertia
5.4. Comparison with Filtering
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DERs | Distributed Energy Resources |
| DLAA | Direct Load Altering Attack |
| FDI | False Data Injection |
| MF-DDPG | Mean Field Deep Deterministic Policy Gradient |
| DDPG | Deep Deterministic Policy Gradient |
| TEP | Transactive Energy Market |
| SCADA | Supervisory Control and Data Acquisition |
| FPK | Fokker–Planck–Komogrov |
| PDE | Partial Differential Equation |
| MFG | Mean Field Games |
| LFC | Load Frequency Controller |
| PID | Proportional-Integral-Derivative |
| LQR | Linear Quadratic Regulator |
References
- Haegel, N.M.; Kurtz, S.R. Global Progress Toward Renewable Electricity: Tracking the Role of Solar. IEEE J. Photovoltaics 2021, 11, 1335–1342. [Google Scholar] [CrossRef]
- Mai, T.; Hand, M.M.; Baldwin, S.F.; Wiser, R.H.; Brinkman, G.L.; Denholm, P.; Arent, D.J.; Porro, G.; Sandor, D.; Hostick, D.J.; et al. Renewable Electricity Futures for the United States. IEEE Trans. Sustain. Energy 2014, 5, 372–378. [Google Scholar] [CrossRef]
- Elavarasan, R.M.; Shafiullah, G.; Padmanaban, S.; Kumar, N.M.; Annam, A.; Vetrichelvan, A.M.; Mihet-Popa, L.; Holm-Nielsen, J.B. A Comprehensive Review on Renewable Energy Development, Challenges, and Policies of Leading Indian States with an International Perspective. IEEE Access 2020, 8, 74432–74457. [Google Scholar] [CrossRef]
- Jiayi, H.; Chuanwen, J.; Rong, X. A review on distributed energy resources and MicroGrid. Renew. Sustain. Energy Rev. 2008, 12, 2472–2483. [Google Scholar] [CrossRef]
- Xu, S.; Xue, Y.; Chang, L. Review of power system support functions for inverter-based distributed energy resources-standards, control algorithms, and trends. IEEE Open J. Power Electron. 2021, 2, 88–105. [Google Scholar] [CrossRef]
- Huang, Q.; Amin, W.; Umer, K.; Gooi, H.B.; Eddy, F.Y.S.; Afzal, M.; Shahzadi, M.; Khan, A.A.; Ahmad, S.A. A review of transactive energy systems: Concept and implementation. Energy Rep. 2021, 7, 7804–7824. [Google Scholar] [CrossRef]
- Zia, M.F.; Benbouzid, M.; Elbouchikhi, E.; Muyeen, S.; Techato, K.; Guerrero, J.M. Microgrid transactive energy: Review, architectures, distributed ledger technologies, and market analysis. IEEE Access 2020, 8, 19410–19432. [Google Scholar] [CrossRef]
- Onunkwo, I.; Wright, B.J.; Cordeiro, P.G.; Jacobs, N.; Lai, C.F.; Johnson, J.T.; Hutchins, T.; Stout, W.M.; Chavez, A.D.; Richardson, B.T.; et al. Cybersecurity Assessments on Emulated DER Communication Networks; Technical Report; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2019.
- Zografopoulos, I.; Ospina, J.; Liu, X.; Konstantinou, C. Cyber-Physical Energy Systems Security: Threat Modeling, Risk Assessment, Resources, Metrics, and Case Studies. IEEE Access 2021, 9, 29775–29818. [Google Scholar] [CrossRef]
- Aljohani, T.; Almutairi, A. A comprehensive survey of cyberattacks on EVs: Research domains, attacks, defensive mechanisms, and verification methods. Def. Technol. 2024; in press. [Google Scholar] [CrossRef]
- Pinto, S.J.; Siano, P.; Parente, M. Review of cybersecurity analysis in smart distribution systems and future directions for using unsupervised learning methods for cyber detection. Energies 2023, 16, 1651. [Google Scholar] [CrossRef]
- Hasan, M.K.; Habib, A.A.; Shukur, Z.; Ibrahim, F.; Islam, S.; Razzaque, M.A. Review on cyber-physical and cyber-security system in smart grid: Standards, protocols, constraints, and recommendations. J. Netw. Comput. Appl. 2023, 209, 103540. [Google Scholar] [CrossRef]
- Zhang, H.; Meng, W.; Qi, J.; Wang, X.; Zheng, W.X. Distributed load sharing under false data injection attack in an inverter-based microgrid. IEEE Trans. Ind. Electron. 2018, 66, 1543–1551. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, X.; Lin, J.; Yu, W. On false data injection attacks against the dynamic microgrid partition in the smart grid. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 7222–7227. [Google Scholar]
- Chlela, M.; Joos, G.; Kassouf, M.; Brissette, Y. Real-time testing platform for microgrid controllers against false data injection cybersecurity attacks. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Krishnan, V.; Zhang, Y.; Kaur, K.; Hahn, A.; Srivastava, A.; Sindhu, S. Cyber-security analysis of transactive energy systems. In Proceedings of the 2018 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Denver, CO, USA, 16–19 April 2018; pp. 1–9. [Google Scholar]
- Majumder, R.; Bag, G.; Kim, K.H. Power Sharing and Control in Distributed Generation with Wireless Sensor Networks. IEEE Trans. Smart Grid 2012, 3, 618–634. [Google Scholar] [CrossRef]
- Yan, S.; Yang, X.; Gu, Z.; Xie, X.; Yang, F. Dynamic sum-based event-triggered H∞ filtering for networked TS fuzzy wind turbine systems with deception attacks. Fuzzy Sets Syst. 2024, 493, 109084. [Google Scholar] [CrossRef]
- Soltan, S.; Mittal, P.; Poor, H.V. {BlackIoT}:{IoT} botnet of high wattage devices can disrupt the power grid. In Proceedings of the 27th USENIX Security Symposium (USENIX Security 18), Baltimore, MD, USA, 15–17 August 2018; pp. 15–32. [Google Scholar]
- Huang, B.; Cardenas, A.A.; Baldick, R. Not everything is dark and gloomy: Power grid protections against {IoT} demand attacks. In Proceedings of the 28th USENIX Security Symposium (USENIX Security 19), Santa Clara, CA, USA, 14–16 August 2019; pp. 1115–1132. [Google Scholar]
- Dasgupta, R.; Sakzad, A.; Rudolph, C. Cyber attacks in transactive energy market-based microgrid systems. Energies 2021, 14, 1137. [Google Scholar] [CrossRef]
- Xu, D.; Girgis, A.A. Optimal load shedding strategy in power systems with distributed generation. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting. Conference Proceedings (Cat. No. 01CH37194), Columbus, OH, USA, 28 January–1 February 2001; Volume 2, pp. 788–793. [Google Scholar]
- Bakar, N.N.A.; Hassan, M.Y.; Sulaima, M.F.; Na’im Mohd Nasir, M.; Khamis, A. Microgrid and load shedding scheme during islanded mode: A review. Renew. Sustain. Energy Rev. 2017, 71, 161–169. [Google Scholar] [CrossRef]
- Lu, M.; ZainalAbidin, W.; Masri, T.; Lee, D.; Chen, S. Under-frequency load shedding (UFLS) schemes—A survey. Int. J. Appl. Eng. Res. 2016, 11, 456–472. [Google Scholar]
- Lewis, F.L.; Vrabie, D. Reinforcement learning and adaptive dynamic programming for feedback control. IEEE Circuits Syst. Mag. 2009, 9, 32–50. [Google Scholar] [CrossRef]
- Arulkumaran, K.; Deisenroth, M.P.; Brundage, M.; Bharath, A.A. Deep reinforcement learning: A brief survey. IEEE Signal Process. Mag. 2017, 34, 26–38. [Google Scholar] [CrossRef]
- Pei, Y.; Yang, J.; Wang, J.; Xu, P.; Zhou, T.; Wu, F. An emergency control strategy for undervoltage load shedding of power system: A graph deep reinforcement learning method. IET Gener. Transm. Distrib. 2023, 17, 2130–2141. [Google Scholar] [CrossRef]
- Wei, Y.; Bugaje, A.A.B.; Bellizio, F.; Strbac, G. Reinforcement learning based optimal load shedding for transient stabilization. In Proceedings of the 2022 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Novi Sad, Serbia, 10–12 October 2022; pp. 1–5. [Google Scholar]
- Zhang, J.; Luo, Y.; Wang, B.; Lu, C.; Si, J.; Song, J. Deep reinforcement learning for load shedding against short-term voltage instability in large power systems. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 4249–4260. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Sun, X.; Lee, M.H.; Moon, J. Deep Reinforcement Learning Based Active Network Management and Emergency Load-Shedding Control for Power Systems. IEEE Trans. Smart Grid 2023, 15, 1423–1437. [Google Scholar] [CrossRef]
- Vu, T.L.; Mukherjee, S.; Yin, T.; Huang, R.; Tan, J.; Huang, Q. Safe reinforcement learning for emergency load shedding of power systems. In Proceedings of the 2021 IEEE Power & Energy Society General Meeting (PESGM), Washington, DC, USA, 26–29 July 2021; pp. 1–5. [Google Scholar]
- Lillicrap, T.P.; Hunt, J.J.; Pritzel, A.; Heess, N.; Erez, T.; Tassa, Y.; Silver, D.; Wierstra, D. Continuous control with deep reinforcement learning. arXiv 2015, arXiv:1509.02971. [Google Scholar]
- Yan, Z.; Xu, Y. A Multi-Agent Deep Reinforcement Learning Method for Cooperative Load Frequency Control of a Multi-Area Power System. IEEE Trans. Power Syst. 2020, 35, 4599–4608. [Google Scholar] [CrossRef]
- Chen, C.; Cui, M.; Li, F.; Yin, S.; Wang, X. Model-Free Emergency Frequency Control Based on Reinforcement Learning. IEEE Trans. Ind. Inform. 2021, 17, 2336–2346. [Google Scholar] [CrossRef]
- Gomes, D.A.; Saúde, J. Mean field games models—A brief survey. Dyn. Games Appl. 2014, 4, 110–154. [Google Scholar] [CrossRef]
- Achdou, Y.; Cardaliaguet, P.; Delarue, F.; Porretta, A.; Santambrogio, F.; Achdou, Y.; Laurière, M. Mean field games and applications: Numerical aspects. In Mean Field Games: Cetraro, Italy 2019; Springer: Berlin/Heidelberg, Germany, 2020; pp. 249–307. [Google Scholar]
- Su, Q.; Li, S.; Gao, Y.; Huang, X.; Li, J. Observer-based detection and reconstruction of dynamic load altering attack in smart grid. J. Frankl. Inst. 2021, 358, 4013–4027. [Google Scholar] [CrossRef]
- Amini, S.; Pasqualetti, F.; Mohsenian-Rad, H. Dynamic Load Altering Attacks Against Power System Stability: Attack Models and Protection Schemes. IEEE Trans. Smart Grid 2018, 9, 2862–2872. [Google Scholar] [CrossRef]
- Glover, J.D.; Sarma, M.S.; Overbye, T. Power System Analysis & Design, SI Version; Cengage Learning: Boston, MA, USA, 2012. [Google Scholar]
- Pillai, A.G.; Rita Samuel, E. PSO based LQR-PID output feedback for load frequency control of reduced power system model using balanced truncation. Int. Trans. Electr. Energy Syst. 2021, 31, e13012. [Google Scholar] [CrossRef]
- Moeini, A.; Kamwa, I.; Brunelle, P.; Sybille, G. Open data IEEE test systems implemented in SimPowerSystems for education and research in power grid dynamics and control. In Proceedings of the 2015 50th International Universities Power Engineering Conference (UPEC), Stoke on Trent, UK, 1–4 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Brunelle, P. 10-Machine New-England Power System IEEE Benchmark; Retrieved 10 October 2023; MATLAB Central File Exchange: Natick, MA, USA, 2023. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus Number | Attack Load |
|---|---|
| Bus 10 | 5 p.u. |
| Bus 12 | 5 p.u. |
| Bus 20 | 5 p.u. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Duan, D.; Xu, H. Zero-Trust Zero-Communication Defence against Hybrid Cyberattacks in Distributed Energy Resources Using Mean Field Reinforcement Leaning. Energies 2024, 17, 5057. https://doi.org/10.3390/en17205057
Zhou Z, Duan D, Xu H. Zero-Trust Zero-Communication Defence against Hybrid Cyberattacks in Distributed Energy Resources Using Mean Field Reinforcement Leaning. Energies. 2024; 17(20):5057. https://doi.org/10.3390/en17205057
Chicago/Turabian StyleZhou, Zejian, Dongliang Duan, and Hao Xu. 2024. "Zero-Trust Zero-Communication Defence against Hybrid Cyberattacks in Distributed Energy Resources Using Mean Field Reinforcement Leaning" Energies 17, no. 20: 5057. https://doi.org/10.3390/en17205057
APA StyleZhou, Z., Duan, D., & Xu, H. (2024). Zero-Trust Zero-Communication Defence against Hybrid Cyberattacks in Distributed Energy Resources Using Mean Field Reinforcement Leaning. Energies, 17(20), 5057. https://doi.org/10.3390/en17205057