
Enhancing the Efficiency of Failure Recognition in Induction Machines through the Application of Deep Neural Networks



Abstract
1. Introduction
2. Materials and Methods
3. Classification of Stator Winding Damage
3.1. Tuned CNN—Stage I
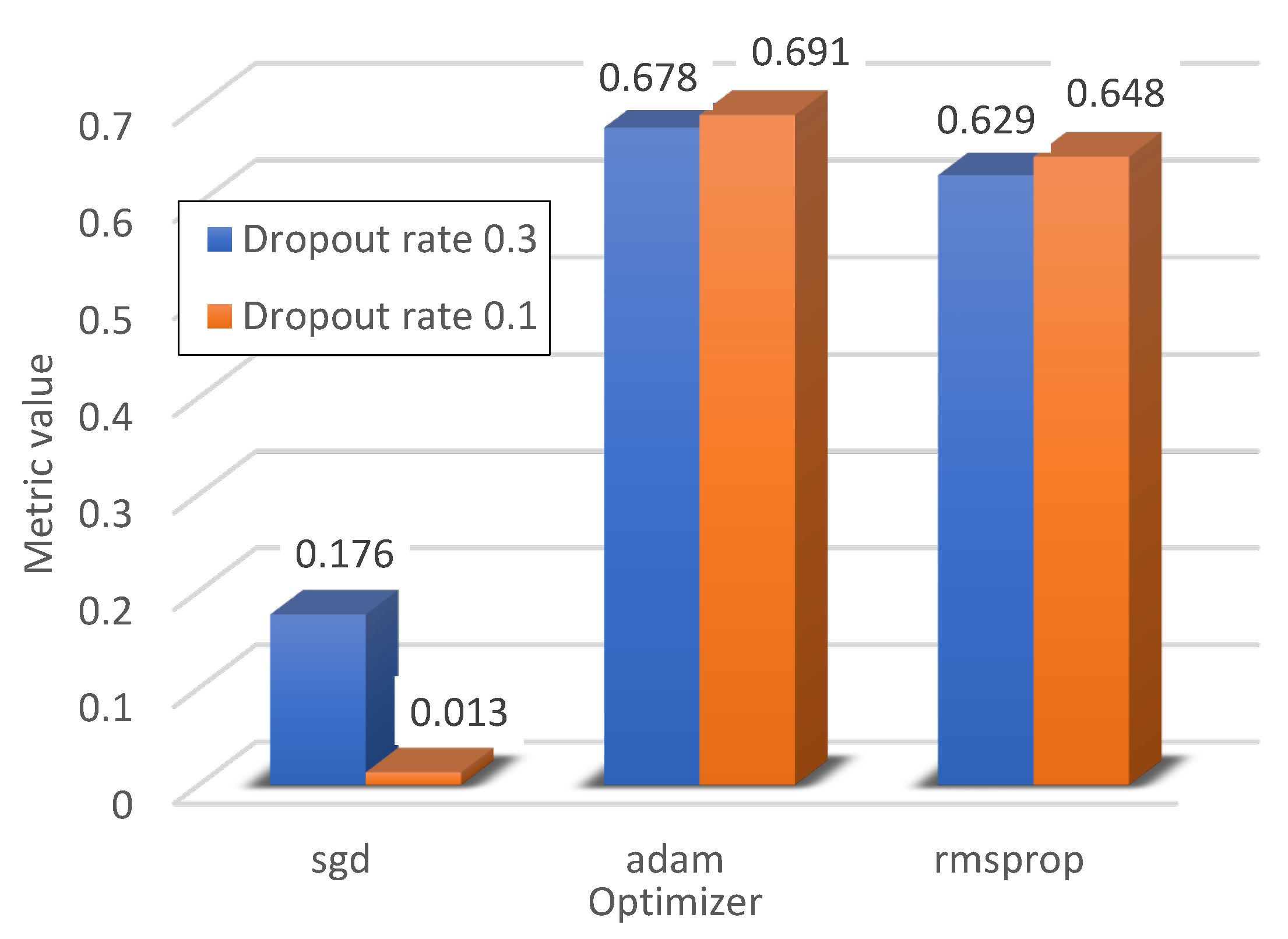
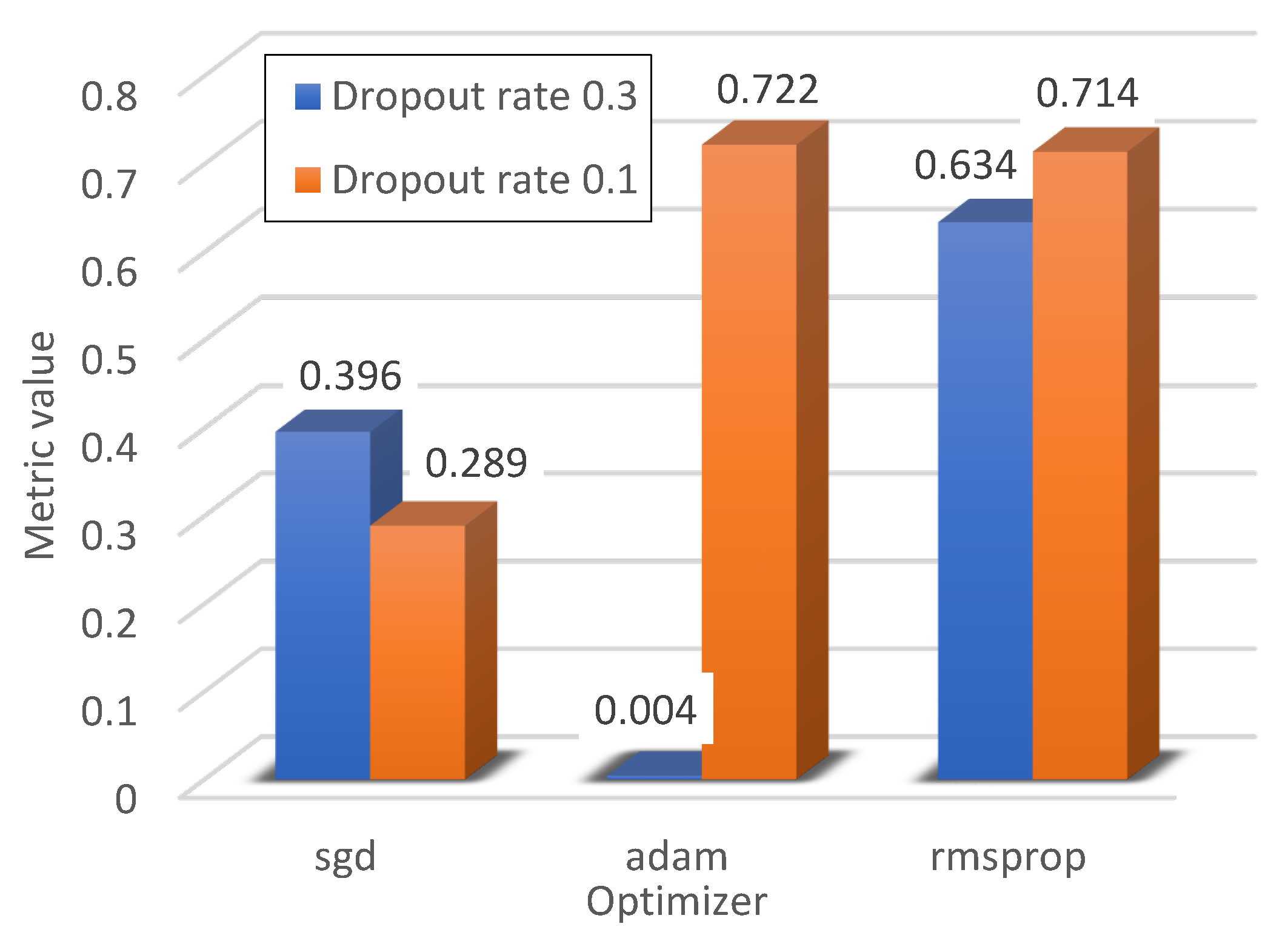
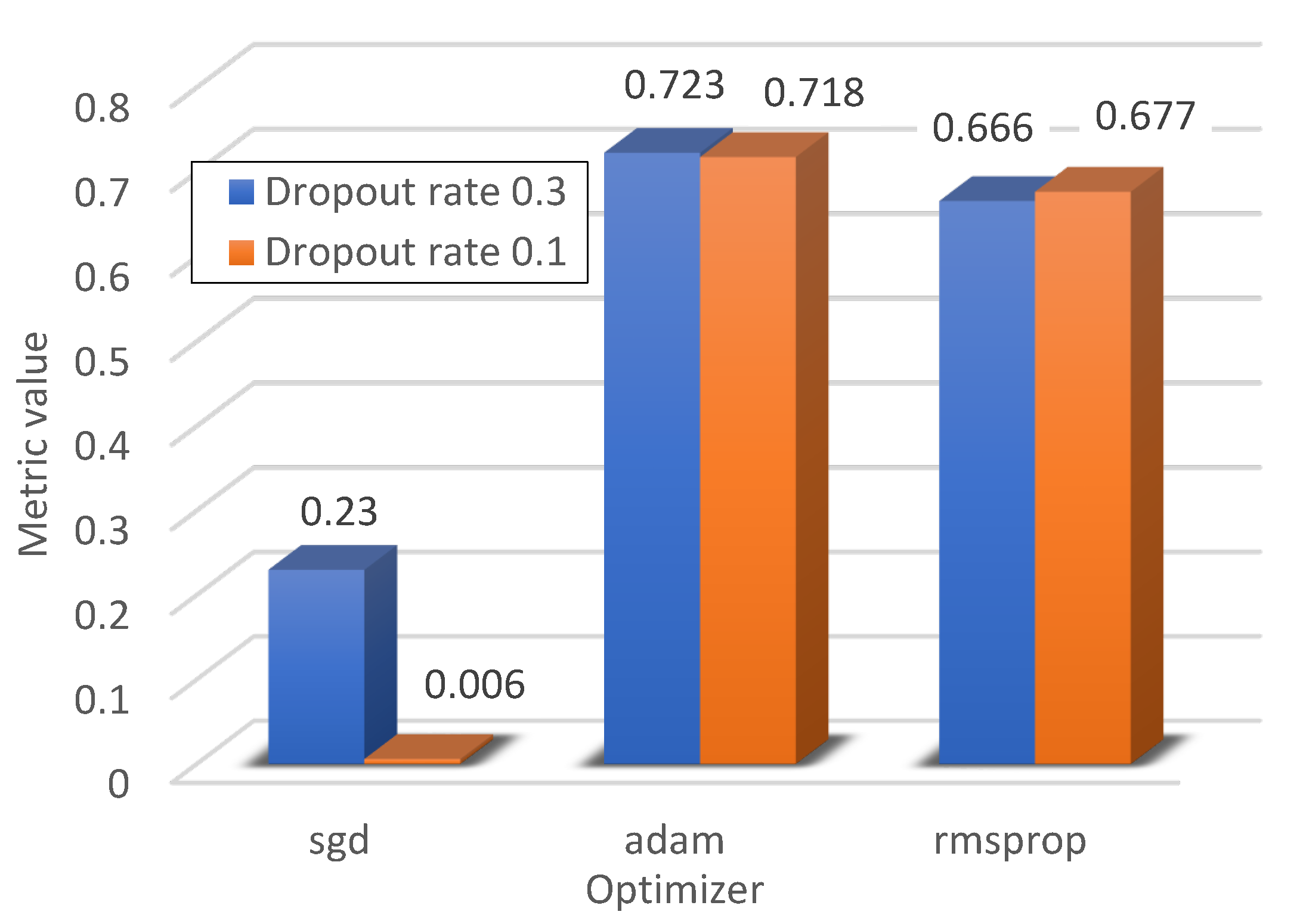
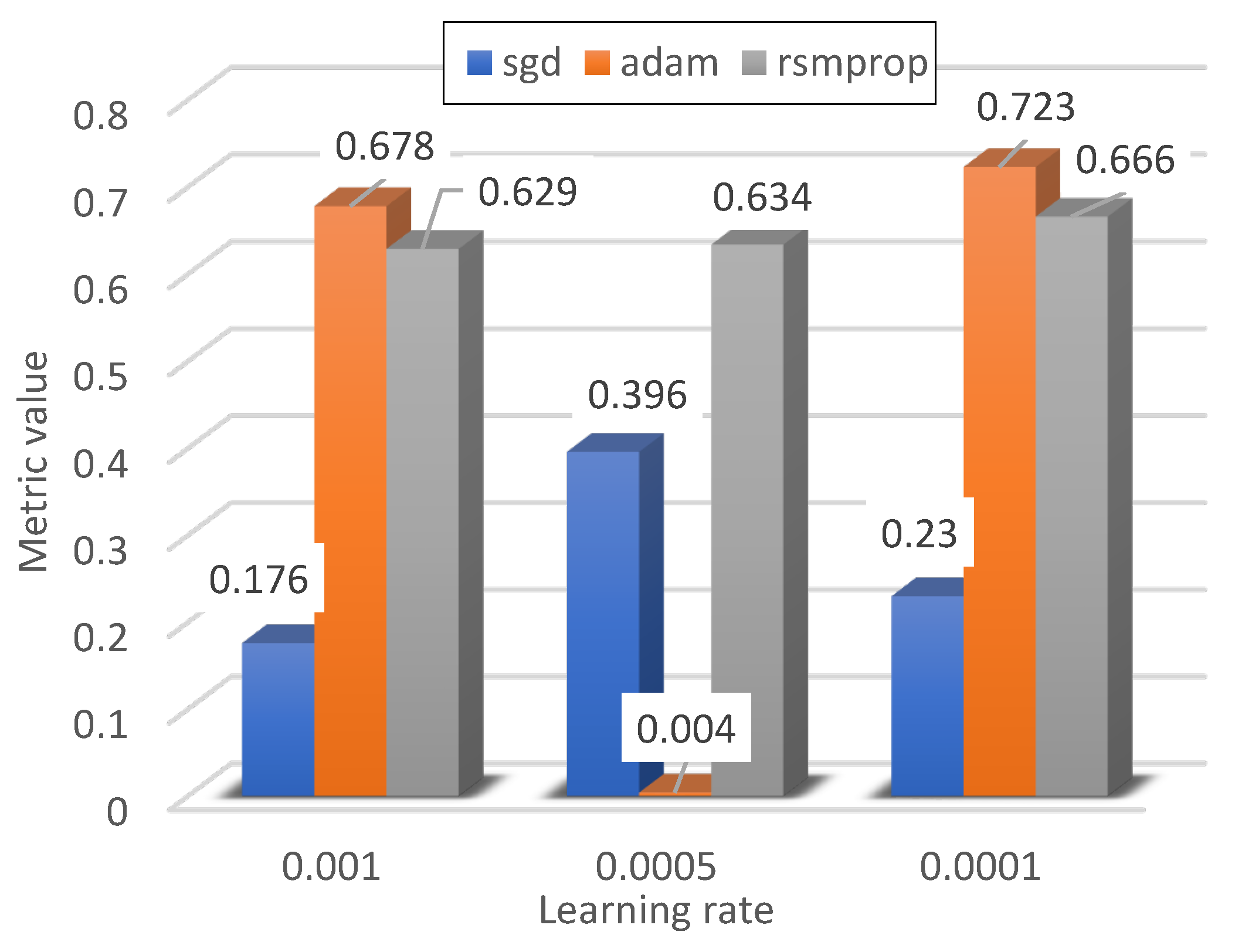
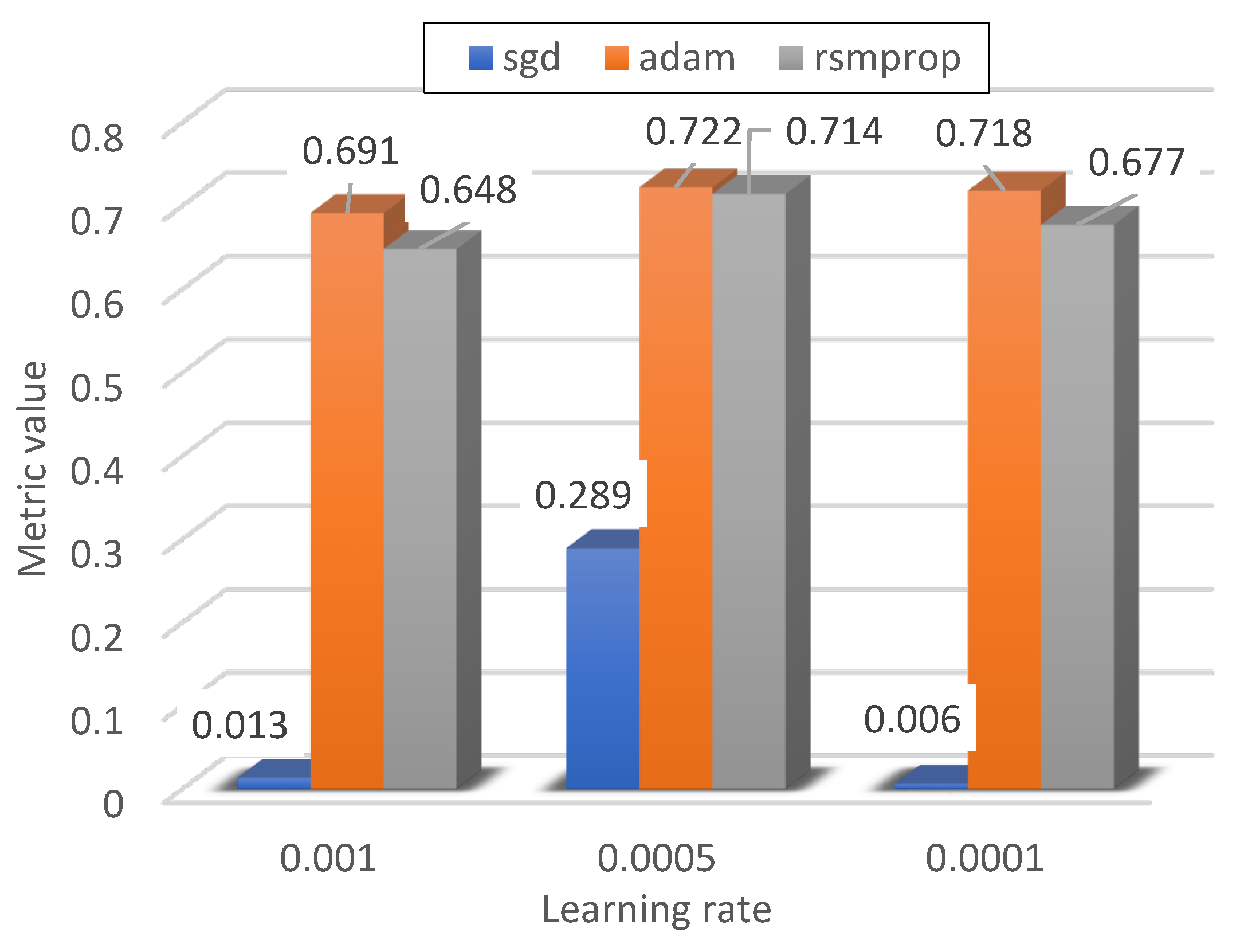
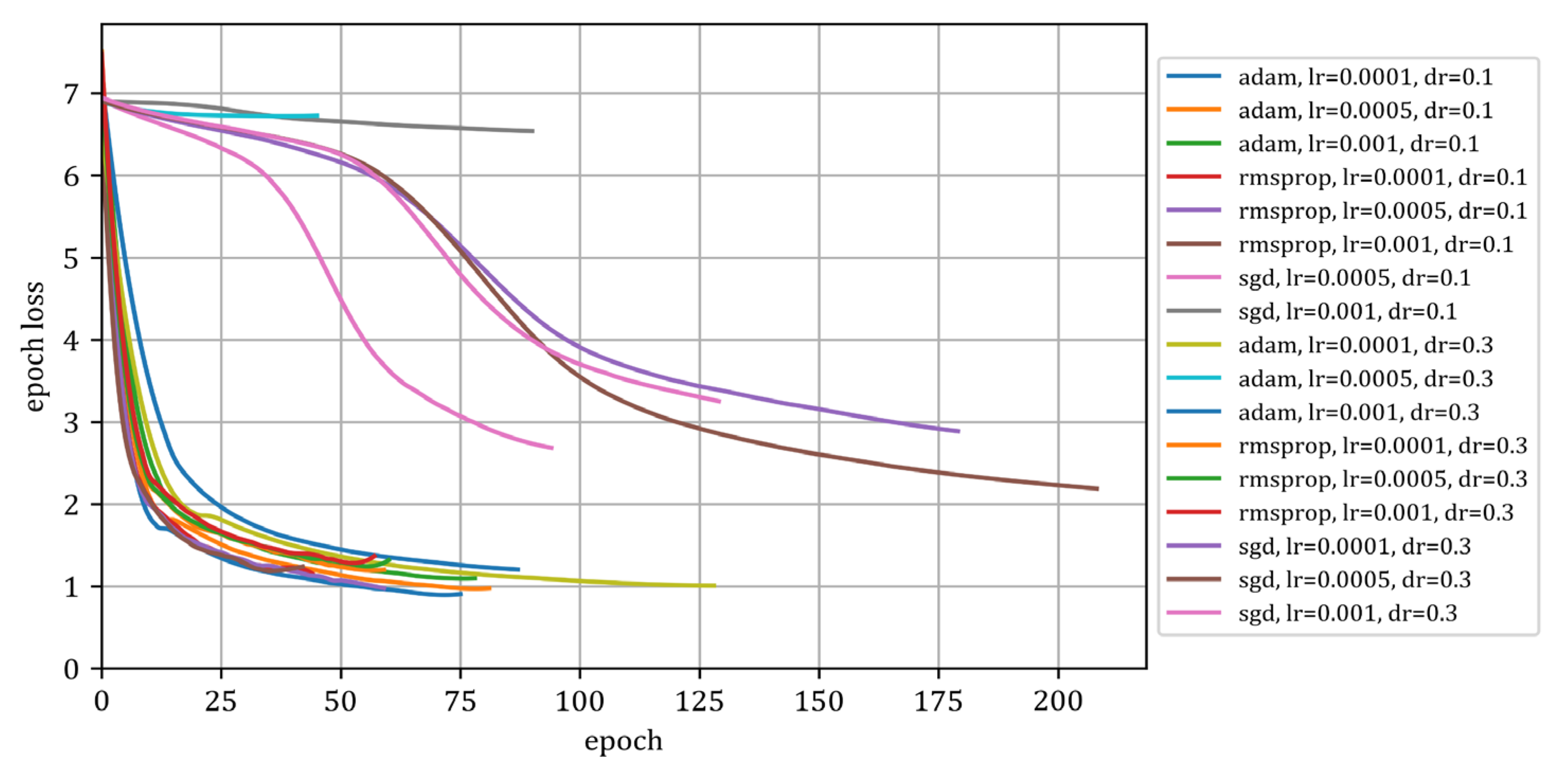
3.1.1. Impact of Optimiser on Multiphase Interturn Short-Circuit Classification



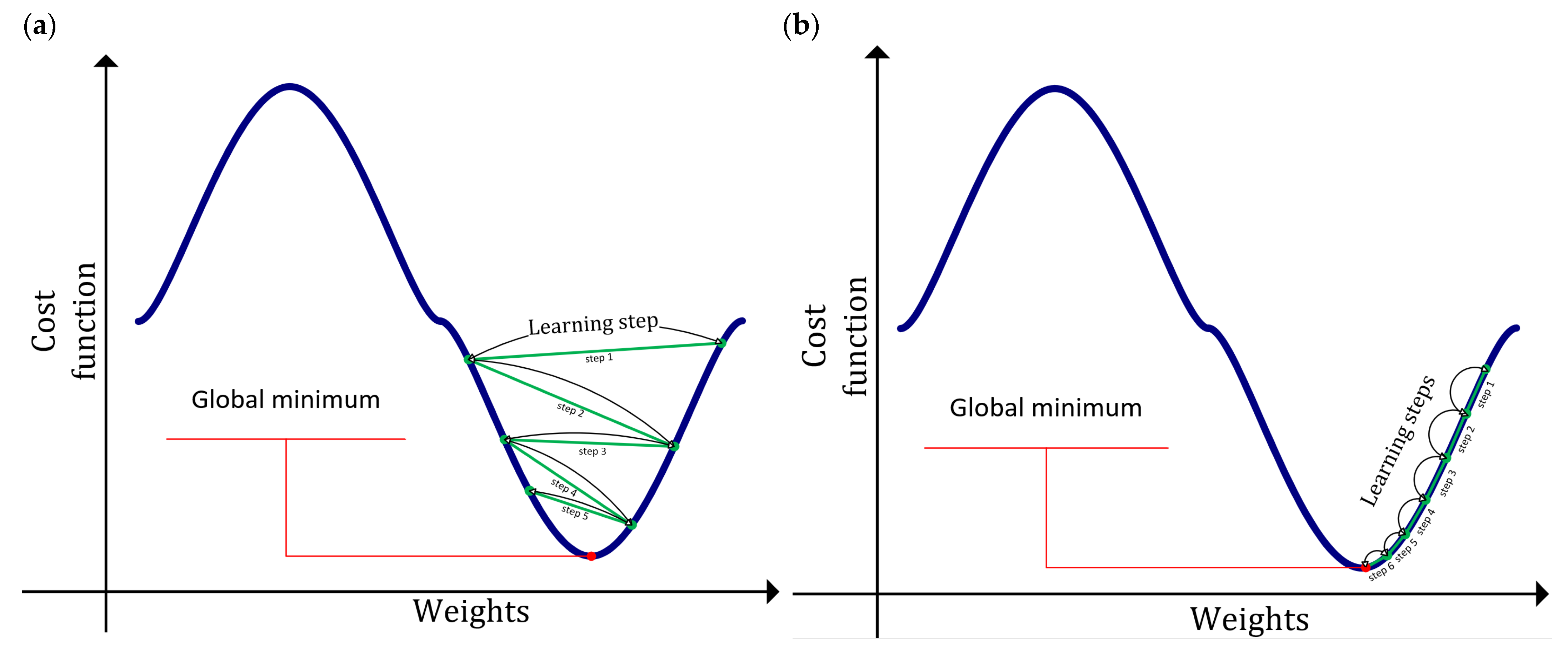
3.1.2. Impact of the Learning Rate on Multiphase Interturn Short-Circuit Classification
3.1.3. Impact of Dropout Rate on Multiphase Interturn Short-Circuit Classification
3.2. Tuned CNN—Stage II
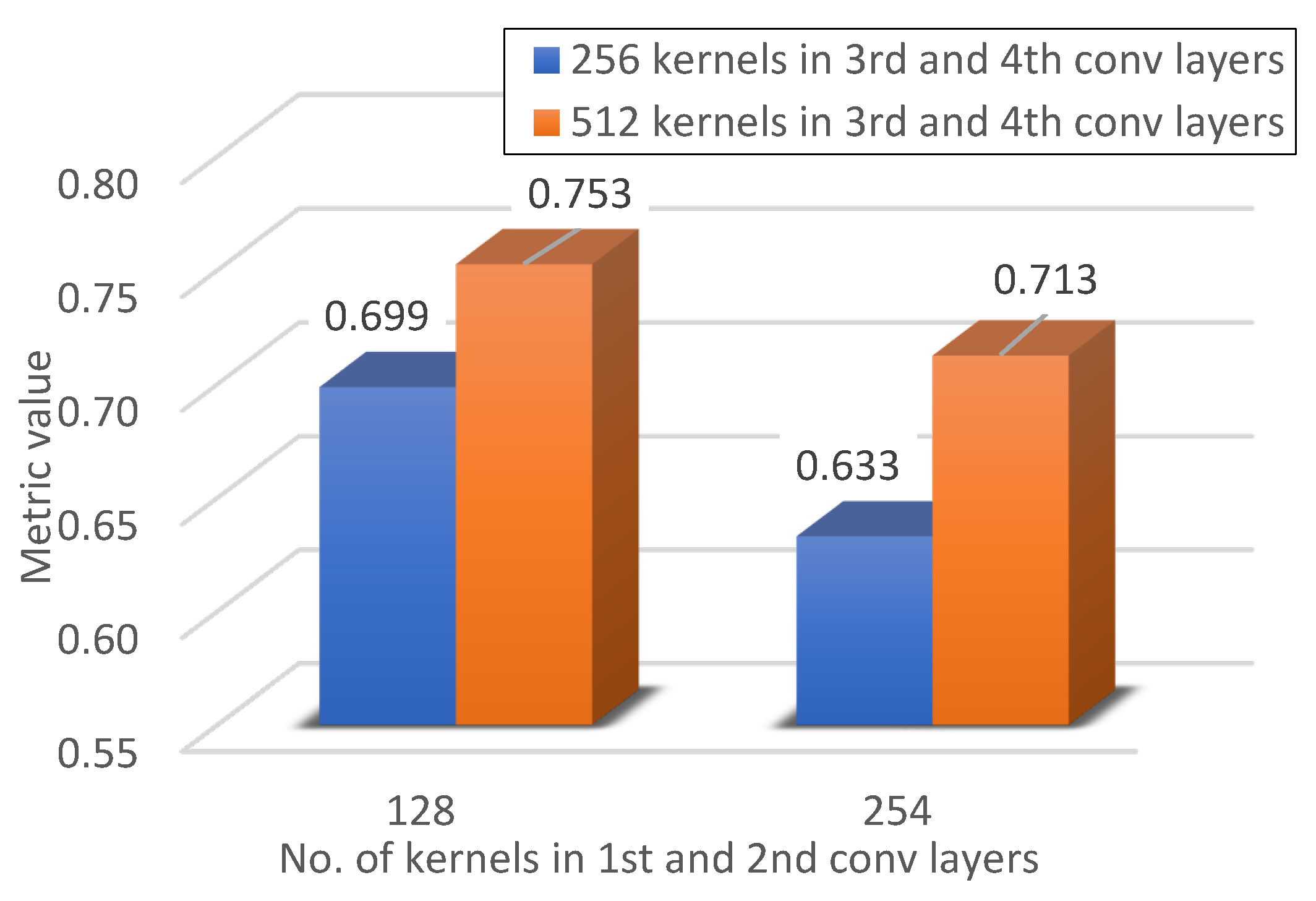
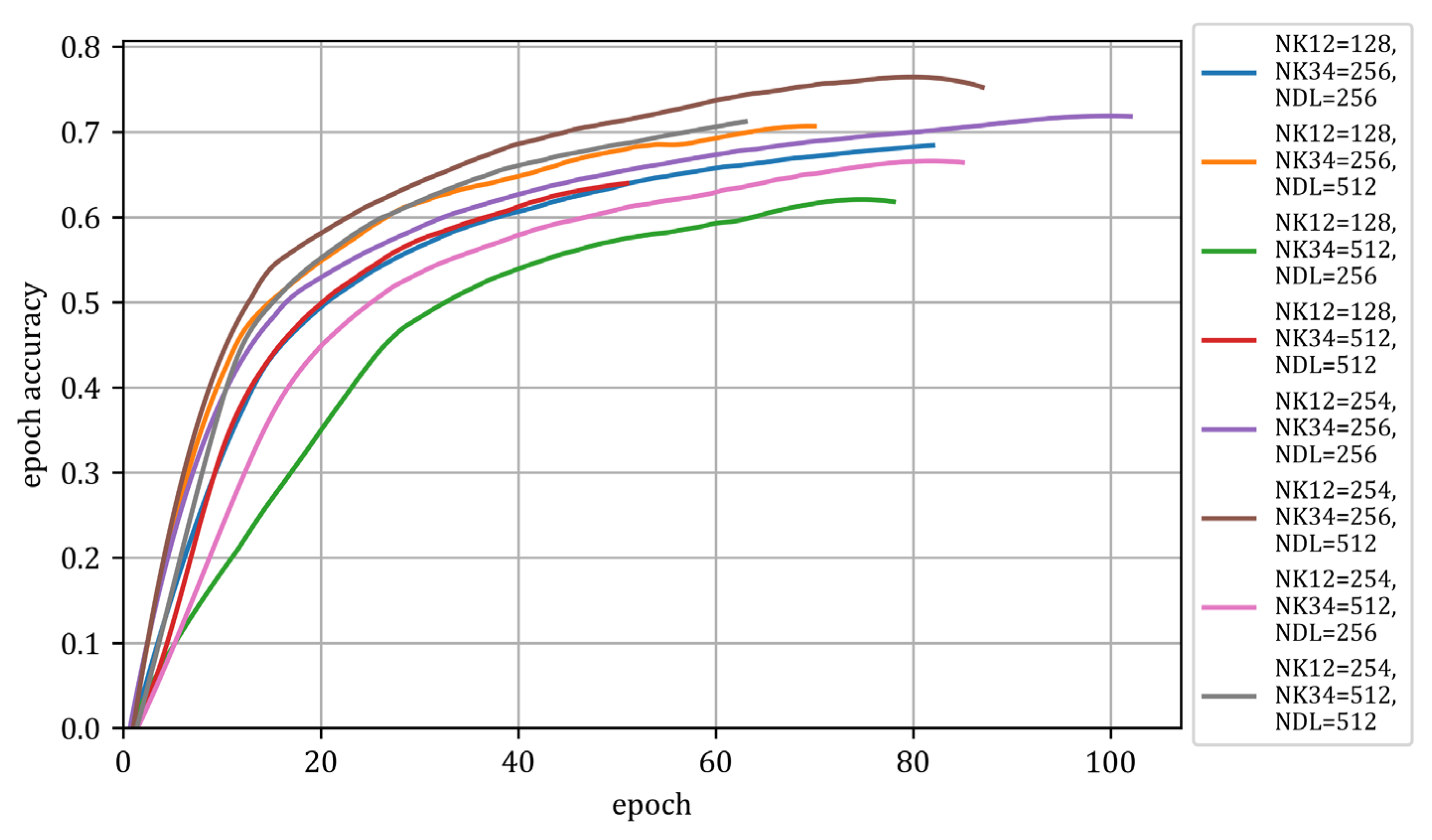
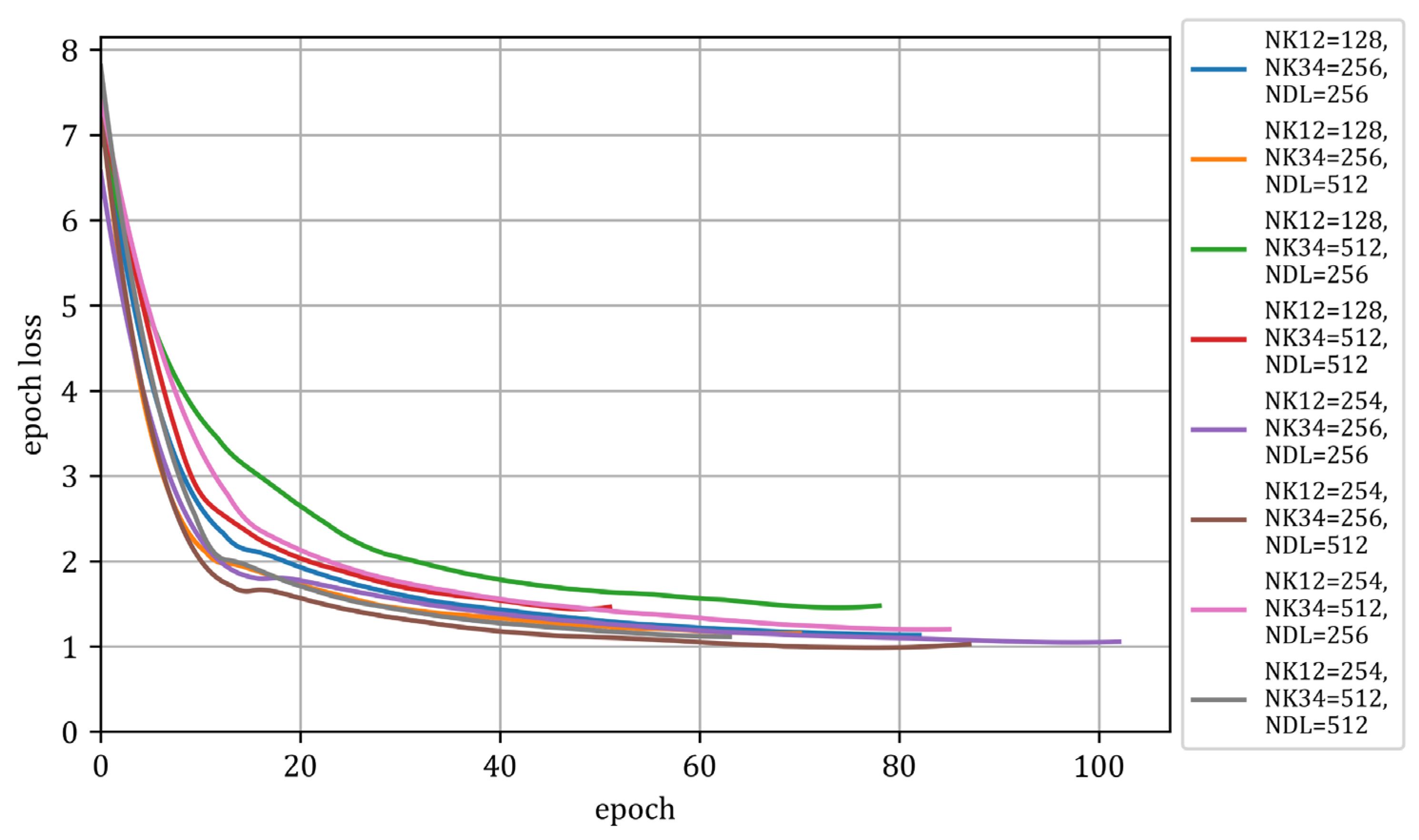
3.2.1. Impact of Number of Kernels on Multiphase Interturn Short-Circuit Classification
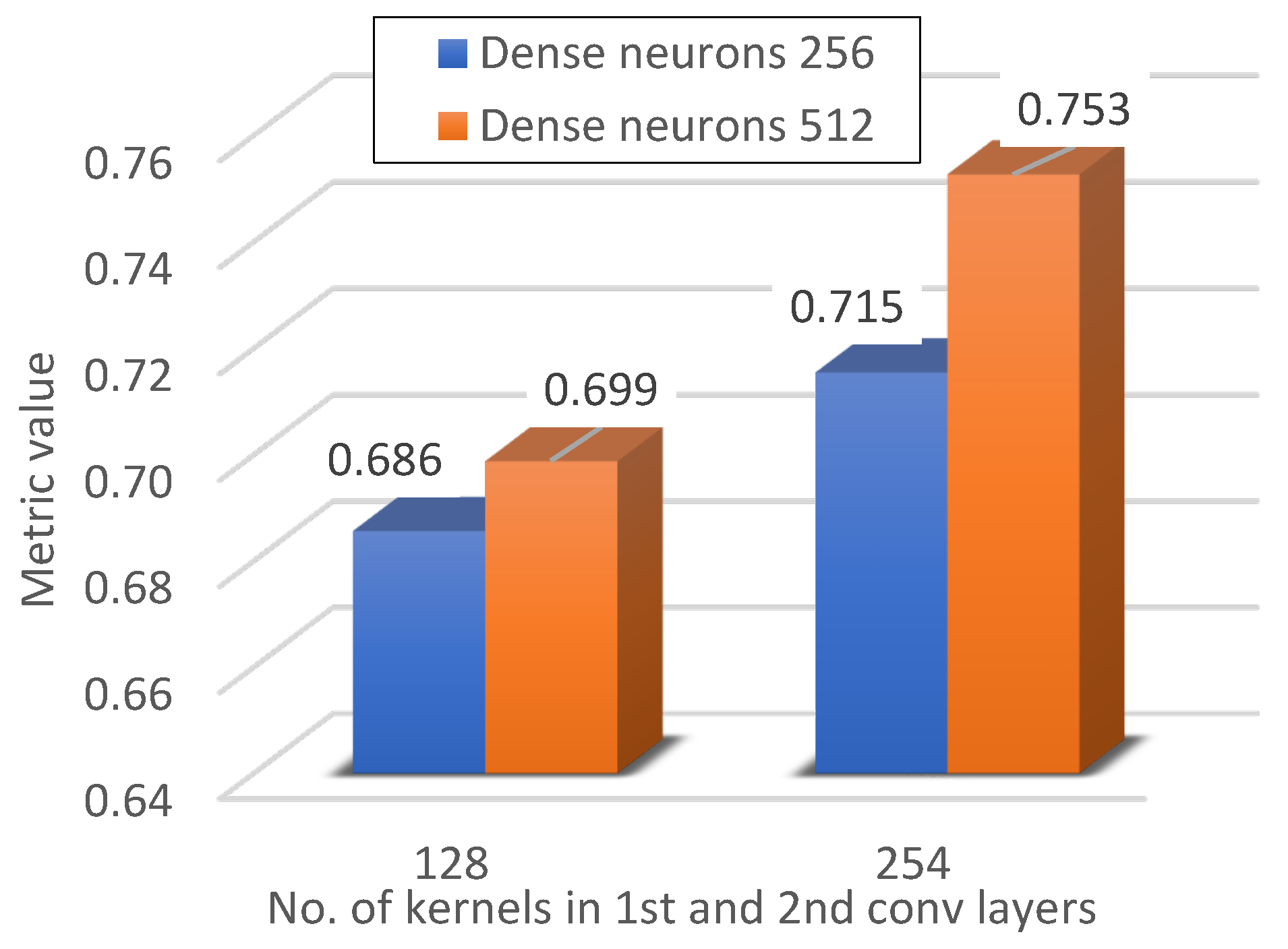
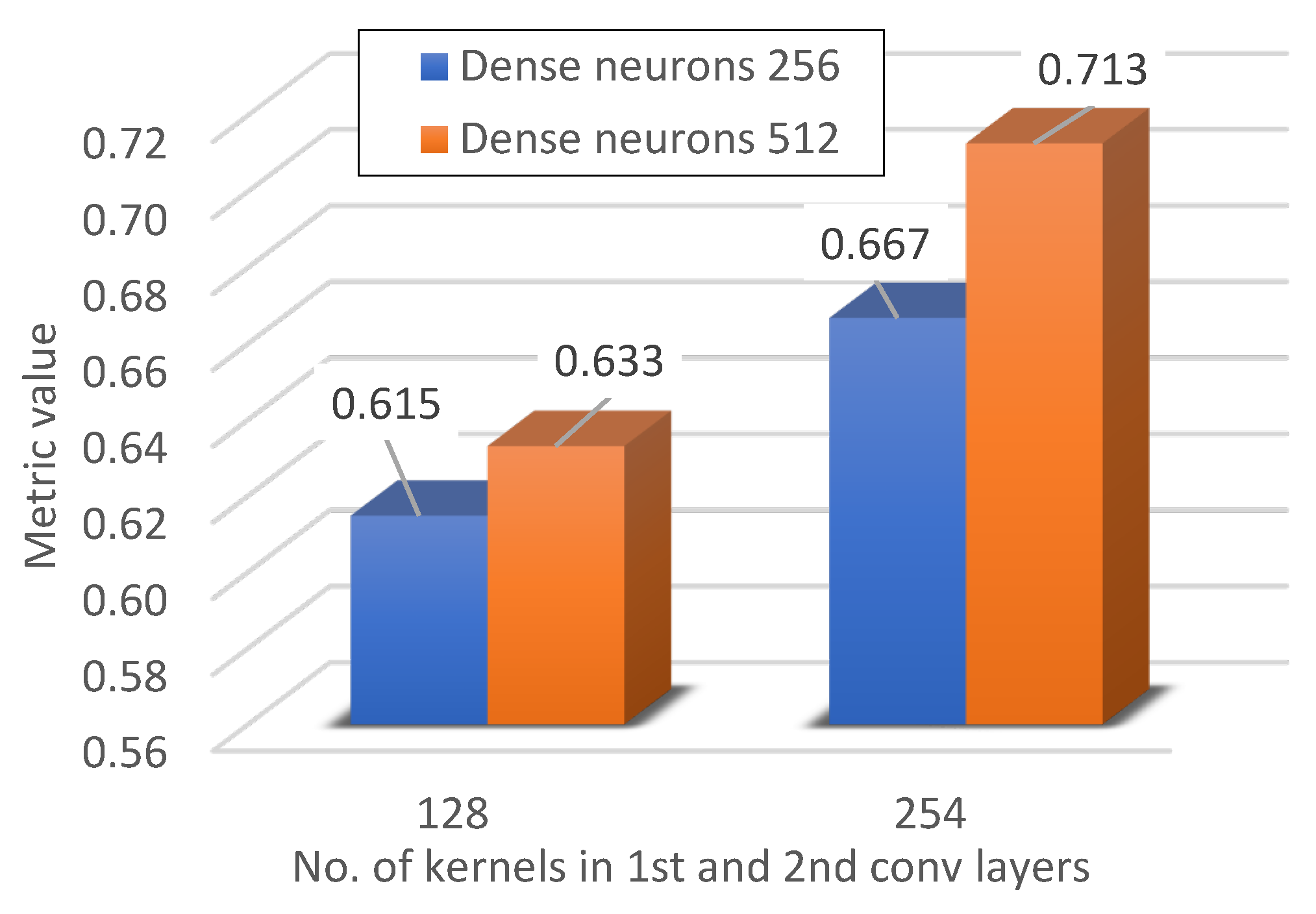
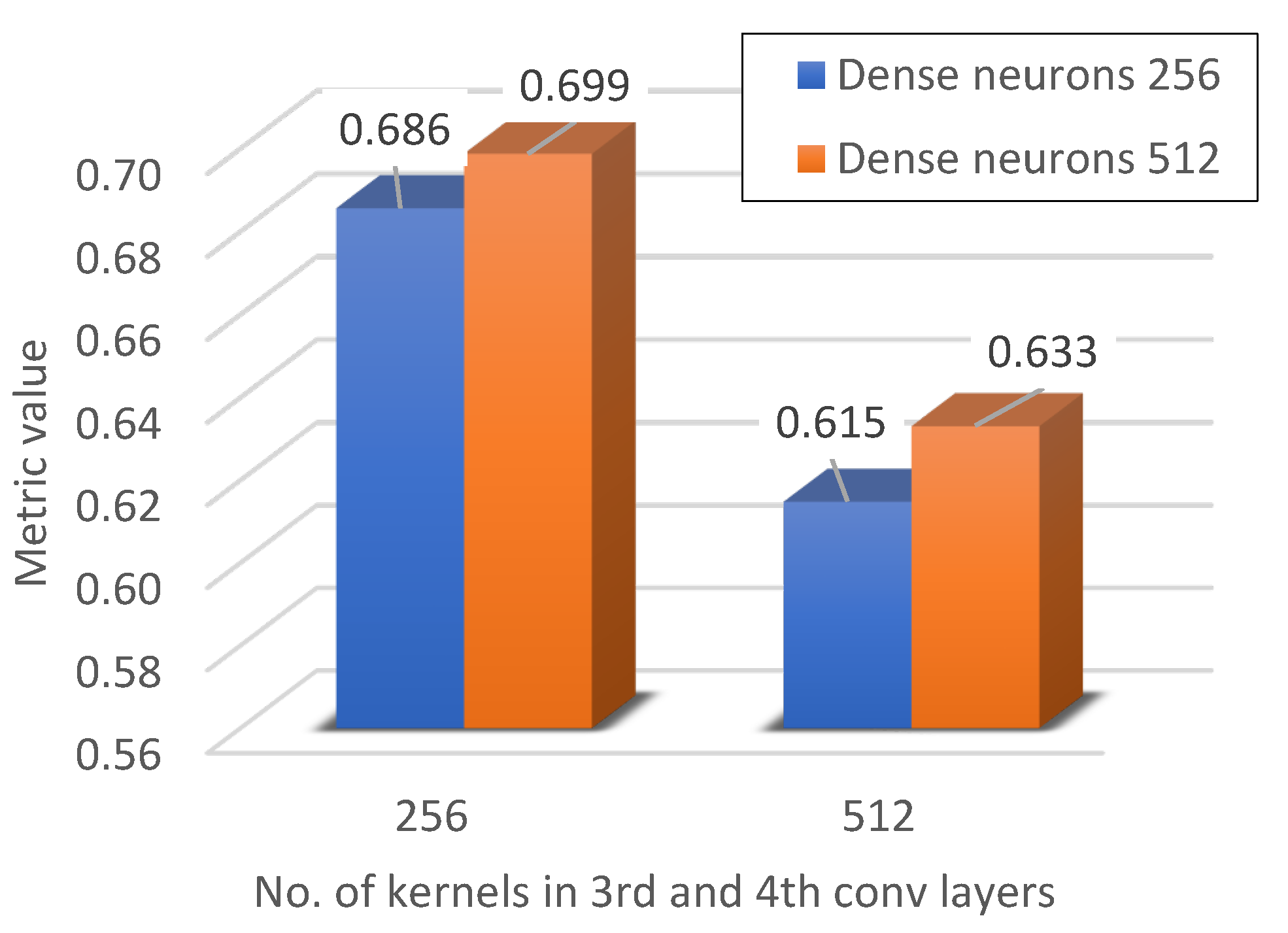
3.2.2. Impact of Number of Neurones in Dense Layer on Multiphase Interturn Short-Circuit Classification

4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Biswal, A.P.; Satpathy, S. Vector Control of 3-Phase Induction Motor. In Proceedings of the 2021 1st Odisha International Conference on Electrical Power Engineering, Communication and Computing Technology (ODICON), Bhubaneswar, India, 8–9 January 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Gecer, B.; Tosun, O.; Apaydin, H.; Oyman Serteller, N.F. Comparative Analysis of SRM, BLDC and Induction Motor Using ANSYS/Maxwell. In Proceedings of the 2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Mauritius, Mauritius, 7–8 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Gumilar, L.; Nugroho, W.S.; Sholeh, M. Power Quality of Synchronous Generator under Conditions of Starting Large Induction Motors Simultaneously and Sequentially. In Proceedings of the 2021 7th International Conference on Electrical, Electronics and Information Engineering (ICEEIE), Malang, Indonesia, 2 October 2021; pp. 66–71. [Google Scholar] [CrossRef]
- Chinthala, A.; Vuddanti, S. Performance Analysis of Induction Motor and PMSM for Electrical Vehicle Traction Application. In Proceedings of the 2022 IEEE International Conference on Distributed Computing and Electrical Circuits and Electronics (ICDCECE), Ballari, India, 23–24 April 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Hooli, S.S.; Vadde, A.; Manickavasagam, K.; Kadambi, G.R. Fuzzy Based Health Monitoring of Electric Vehicle Motor using Time Domain Analysis. In Proceedings of the 2021 International Conference on Sustainable Energy and Future Electric Transportation (SEFET), Hyderabad, India, 21–23 January 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Kerdsup, B.; Masomtob, M. Comparative Design between Induction Motor and Synchronous Reluctance Motor used for Electric Vehicle Conversion. In Proceedings of the 2022 25th International Conference on Electrical Machines and Systems (ICEMS), Chiang Mai, Thailand, 29 November–2 December 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Priyanka, C.P.; Nair, N.S.; Jagdanand, G. Thermal Analysis of Multiphase Induction Motor for Electric Vehicle Applications. In Proceedings of the 2022 IEEE Transportation Electrification Conference & Expo (ITEC), Anaheim, CA, USA, 15–17 June 2022; pp. 801–806. [Google Scholar] [CrossRef]
- Takahashi, A.; Sugimoto, S.; Nishihama, K.; Sumita, S.; Taniguchi, S.; Hoshino, K.; Maekawa, N. Mechanical Winding Changeover System of Induction Motors for Vehicle Applications. In Proceedings of the 2022 International Conference on Electrical Machines (ICEM), Valencia, Spain, 5–8 September 2022; pp. 367–372. [Google Scholar] [CrossRef]
- Afanasyev, Y.; Pashali, D.; Yushkova, O.; Zhuravlev, D. Investigation of the Rotor Slots Skew Effect on the Induction Motor Characteristics. In Proceedings of the 2021 International Conference on Electrotechnical Complexes and Systems (ICOECS), Ufa, Russia, 16–18 November 2021; pp. 214–218. [Google Scholar] [CrossRef]
- Ferdiansyah, I.; Purwanto, E.; Prabowo, G.; Adila, A.F.; Rusli, M.R.; Irawan, R. Interfacing PCI 1710 and Real-Time Windows Target for Induction Motor Speed Control Based on Vector Control Designed by Variable Flux Reference. In Proceedings of the 2022 International Conference on Electrical Engineering, Computer and Information Technology (ICEECIT), Jember, Indonesia, 22–23 November 2022; pp. 113–117. [Google Scholar] [CrossRef]
- Barański, M. Electrothermal analysis of start-up process in the squirrel cage induction motor using FEM. Czas. Tech. Elektrotechnika 2016, 2-E, 151–160. [Google Scholar] [CrossRef]
- Ma, Z.; Zhou, C.; Hepburn, D.M.; Cowan, K. FEM simulation of electrical stresses within motor stator windings for online PD Localization. In Proceedings of the 2015 IEEE 11th International Conference on the Properties and Applications of Dielectric Materials (ICPADM), Sydney, Australia, 19–22 July 2015; pp. 668–671. [Google Scholar] [CrossRef]
- Pečínka, P.; Kocman, S.; Pečínková, V. Use of FEM modeling to optimize the design of induction motor. In Proceedings of the 2022 ELEKTRO (ELEKTRO), Krakow, Poland, 23–26 May 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Tvoric, S.; Tomicic, B.; Car, S. Calculation of Asynchronous Traction Motor Start-Up Characteristics by FEM Method. In Proceedings of the International Symposium on Power Electronics Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012. [Google Scholar]
- Ansari, M.N.; Singh, A.K.; Kumar, P. Performance analysis of a hybrid dual rotor motor for electric vehicle application. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 2002–2007. [Google Scholar] [CrossRef]
- Bekir, W.; Messal, O.; Benabou, A. Permanent Magnet Non-Linear Demagnetization Model for FEM Simulation Environment. IEEE Trans. Magn. 2022, 58, 7400405. [Google Scholar] [CrossRef]
- Mujaahid, F.; Mustar, M.Y. Iron Losses Quick Prediction of Permanent Magnet Synchronous Motor Based on FEM Analysis. In Proceedings of the 2022 2nd International Conference on Electronic and Electrical Engineering and Intelligent System (ICE3IS), Yogyakarta, Indonesia, 4–5 November 2022; pp. 94–98. [Google Scholar] [CrossRef]
- Pal, S.; Sengupta, M. FEM analysis and experiments of a Double-sided Axial Flux Switched Reluctance Motor for two alternative phase winding terminal connections. In Proceedings of the 2022 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Thiruvananthapuram, India, 10–12 March 2022; Volume 1, pp. 418–424. [Google Scholar] [CrossRef]
- Trifa, V.; Marginean, C.; Trifa, O. FEM analysis of reluctant motors for direct driving of the light electric vehicles. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Das, S.; Roy, D.; Sengupta, M. Detailed FEM-based Analysis of Vibration in a 3-phase Switched Reluctance Motor and its Experimental Validation. In Proceedings of the 2022 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Thiruvananthapuram, India, 10–12 March 2022. [Google Scholar]
- Bessous, N.; Zouzou, S.E.; Sbaa, S.; Khelil, A. New vision about the overlap frequencies in the MCSA-FFT technique to diagnose the eccentricity fault in the induction motors. In Proceedings of the 2017 5th International Conference on Electrical Engineering-Boumerdes (ICEE-B), Boumerdes, Algeria, 29–31 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Deeb, M.; Kotelenets, N.F.; Assaf, T.; Sultan, H.M.; Al-Akayshee, A.S. Three-Phase Induction Motor Short Circuits Fault Diagnosis using MCSA and NSC. In Proceedings of the 2021 3rd International Youth Conference on Radio Electronics, Electrical and Power Engineering (REEPE), Moscow, Russia, 11–13 March 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Eldeeb, H.H.; Secrest, C.; Zhao, H.; Mohammed, O.A. Time-Domain based Diagnosis of Stator Incipient Faults in DTC Driven Induction Motors using External Electro Magnetic Signatures. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 5124–5128. [Google Scholar] [CrossRef]
- Górny, K.; Kuwałek, P.; Pietrowski, W. Increasing Electric Vehicles Reliability by Non-Invasive Diagnosis of Motor Winding Faults. Energies 2021, 14, 2510. [Google Scholar] [CrossRef]
- Bessous, N.; Sbaa, S.; Toumi, A. Experimental investigation on broken rotor bar faults in three phase induction motors using MVSA-FFT method. In Proceedings of the 2018 6th International Conference on Control Engineering & Information Technology (CEIT), Istanbul, Turkey, 25–27 October 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Kabul, A.; Ünsal, A. An Alternative Approach for the Detection of Broken Rotor Bars and Bearing Faults of Induction Motor Based on Vibration Signals. In Proceedings of the 2021 8th International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 9–11 April 2021; pp. 126–131. [Google Scholar] [CrossRef]
- Sun, W.; Cao, X. Curvature enhanced bearing fault diagnosis method using 2D vibration signal. J. Mech. Sci. Technol. 2020, 34, 2257–2266. [Google Scholar] [CrossRef]
- Husari, F.; Seshadrinath, J. Inter-Turn Fault Diagnosis of Induction Motor Fed by PCC-VSI Using Park Vector Approach. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Mahesh, A.; Aadhavan, B.A.; Meenaa, V.V.; Omar, M.B.; Ibrahim, R.B.; Salehuddin, N.F.; Sujatha, R. Employment of ANN for Predictive Motor Maintenance and Bearing Fault Detection Using Park’s Vector Analysis. In Proceedings of the 2022 IEEE 5th International Symposium in Robotics and Manufacturing Automation (ROMA), Malacca, Malaysia, 6–8 August 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Sharma, A.; Chatterji, S.; Mathew, L. A Novel Park’s Vector Approach for Investigation of Incipient Stator Fault Using MCSA in Three-Phase Induction Motors. In Proceedings of the 2017 International Conference on Innovations in Control, Communication and Information Systems (ICICCI), Greater Noida, India, 12–13 August 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Basaran, M.; Fidan, M. Induction motor fault classification via entropy and column correlation features of 2D represented vibration data. Eksploat. Niezawodn. 2021, 23, 132–142. [Google Scholar] [CrossRef]
- Zimnickas, T.; Vanagas, J.; Dambrauskas, K.; Kalvaitis, A. A Technique for Frequency Converter-Fed Asynchronous Motor Vibration Monitoring and Fault Classification, Applying Continuous Wavelet Transform and Convolutional Neural Networks. Energies 2020, 13, 3690. [Google Scholar] [CrossRef]
- Choi, D.-J.; Han, J.-H.; Park, S.-U.; Hong, S.-K. Comparative Study of CNN and RNN for Motor fault Diagnosis Using Deep Learning. In Proceedings of the 2020 IEEE 7th International Conference on Industrial Engineering and Applications (ICIEA), Bangkok, Thailand, 16–21 April 2020; pp. 693–696. [Google Scholar] [CrossRef]
- Han, J.-H.; Choi, D.-J.; Park, S.-U.; Hong, S.-K. Diagnosis of motor aging through CNN model using signal correlation. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 571–575. [Google Scholar] [CrossRef]
- Mukhopadhyay, R.; Panigrahy, P.S.; Misra, G.; Chattopadhyay, P. Quasi 1D CNN-based Fault Diagnosis of Induction Motor Drives. In Proceedings of the 2018 5th International Conference on Electric Power and Energy Conversion Systems (EPECS), Kitakyushu, Japan, 23–25 April 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Khan, S.A.; Prosvirin, A.E.; Kim, J.-M. Towards bearing health prognosis using generative adversarial networks: Modeling bearing degradation. In Proceedings of the 2018 International Conference on Advancements in Computational Sciences (ICACS), Lahore, Pakistan, 19–21 February 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Lee, Y.O.; Jo, J.; Hwang, J. Application of deep neural network and generative adversarial network to industrial maintenance: A case study of induction motor fault detection. In Proceedings of the 2017 IEEE International Conference on Big Data (Big Data), Boston, MA, USA, 11–14 December 2017; pp. 3248–3253. [Google Scholar] [CrossRef]
- Shim, J.; Joung, T.; Lee, S.; Ha, J.-I. Audio Data-driven Anomaly Detection for Induction Motor Based on Generative Adversarial Networks. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Khan, T.; Alekhya, P.; Seshadrinath, J. Incipient Inter-turn Fault Diagnosis in Induction motors using CNN and LSTM based Methods. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Portland, OR, USA, 23–27 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Rayhan, F.; Shaurov, S.; Nashrah Khan, A.; Jahan, S.; Zaman, R.; Hasan, Z.; Rahman, T.; Bhuiyan, E.A. A Bi-directional Temporal Sequence Approach for Condition Monitoring of Broken Rotor Bar in Three-Phase Induction Motors. In Proceedings of the 2023 International Conference on Electrical, Computer and Communication Engineering (ECCE), Chittagong, Bangladesh, 23–25 February 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Xiao, D.; Huang, Y.; Zhang, X.; Shi, H.; Liu, C.; Li, Y. Fault Diagnosis of Asynchronous Motors Based on LSTM Neural Network. In Proceedings of the 2018 Prognostics and System Health Management Conference (PHM-Chongqing), Chongqing, China, 26–28 October 2018; pp. 540–545. [Google Scholar] [CrossRef]
- Han, J.-H.; Choi, D.-J.; Hong, S.-K.; Kim, H.-S. Motor Fault Diagnosis Using CNN Based Deep Learning Algorithm Considering Motor Rotating Speed. In Proceedings of the 2019 IEEE 6th International Conference on Industrial Engineering and Applications (ICIEA), Tokyo, Japan, 12–15 April 2019; pp. 440–445. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated power Rated voltage Rated current Rated speed Number of phases Number of stator slots Number of rotor slots Rated efficiency Frequency Stator winding resistance | 3 kW 400 V 6.3 A 1465 rpm 3 36 28 87.7% 50 Hz 1.46 Ω | Rated power factor Rated torque Number of poles Stator outer diameter Stator inner diameter Rotor outer diameter Rotor inner diameter Stator Steel Rotor Steel | 0.79 19.56 Nm 4 168 mm 108 mm 107.5 mm 35 mm M470–50A M470–50A |
| Band | Shaft | Outer Region | Stator | Rotor | Bars | Coils | |
|---|---|---|---|---|---|---|---|
| Num Elements | 416 | 838 | 1670 | 2664 | 7448 | 4592 | 302 |
| Min edge length (mm) | 0.1 | 0.6 | 0.1 | 0.6 | 0.0783 | 0.0783 | 0.2 |
| Max edge length (mm) | 1.0 | 2.0 | 5.0 | 9.0 | 2.0 | 2.0 | 2.0 |
| RMS edge length (mm) | 1.0 | 0.001 | 0.002 | 0.003 | 0.001 | 0.001 | 0.001 |
| Min elem area (mm2) | 0.03006 | 0.5195 | 0.02822 | 0.2350 | 0.005145 | 0.006837 | 0.3275 |
| Max elem area (mm2) | 0.1225 | 1.435 | 3.977 | 24.69 | 2.218 | 2.461 | 0.3275 |
| Mean elem area (mm2) | 0.1016 | 1.147 | 1.018 | 3.625 | 0.7665 | 0.5234 | 0.3275 |
| Std Devn (area) (mm2) | 0.028771 | 0.3150 | 0.9148 | 5.625 | 0.6158 | 0.6310 | 8.38 × 10−8 |
| Parameter | Value |
|---|---|
| Number of convolutional layers | 4 |
| Number of pooling layers | 2 |
| Number of dropout layers | 2 |
| Number of flatten layers | 1 |
| Number of dense layers | 2 |
| Methods to prevent overfitting | Early stop, weights reg. |
| Weights regularization method | L2 norm |
| Number of epochs | 700 |
| Dimensions of the input vector | (28,28) |
| Batch size | 1024 |
| Kernel size | (3 × 3) |
| Kernel stride | (1,1) |
| Dilation rate | (1,1) |
| Padding method | Valid |
| Pool size | (2, 2) |
| Momentum factor for SGD | 0.5 |
| Convolution layer activation | Rectified linear unit |
| Activation function for the first dense layer | Rectified linear unit |
| Activation function for the second dense layer | Softmax |
| Loss function | Sparse categorial cross-entropy |
| Parameters | Abbreviations | Values |
|---|---|---|
| Learning rate | lr | 0.001, 0.0005, 0.0001 |
| Optimiser | - | Stochastic gradient descent (SGD), adaptive momentum estimation (ADAM), root mean square propagation (RMSProp) |
| Dropout rate | dr | 0.1, 0.3 |
| Learning Rate | Optimiser | Dropout Rate | Metrics | Step |
|---|---|---|---|---|
| 0.001 | SGD | 0.3 | 0.176 | 129 |
| 0.0005 | SGD | 0.1 | 0.289 | 94 |
| 0.0001 | ADAM | 0.3 | 0.723 | 128 |
| 0.001 | SGD | 0.1 | 0.013 | 90 |
| 0.0001 | RMSProp | 0.3 | 0.666 | 59 |
| 0.001 | RMSProp | 0.1 | 0.648 | 42 |
| 0.0001 | SGD | 0.3 | 0.230 | 179 |
| 0.0001 | RMSProp | 0.1 | 0.677 | 44 |
| 0.0005 | RMSProp | 0.1 | 0.714 | 59 |
| 0.0005 | ADAM | 0.1 | 0.722 | 81 |
| 0.0005 | SGD | 0.3 | 0.396 | 208 |
| 0.001 | ADAM | 0.3 | 0.678 | 87 |
| 0.0001 | SGD | 0.1 | 0.006 | 4 |
| 0.001 | ADAM | 0.1 | 0.691 | 78 |
| 0.0005 | RMSProp | 0.3 | 0.634 | 60 |
| 0.0001 | ADAM | 0.1 | 0.718 | 75 |
| 0.0005 | ADAM | 0.3 | 0.004 | 45 |
| 0.001 | RMSProp | 0.3 | 0.629 | 60 |
| Parameters | Values |
|---|---|
| The number of kernels in the first two convolutional layers of the network | 128,256 |
| The number of kernels in the third and fourth convolutional layers of the network | 256,512 |
| The number of units in the dense layer | 265,512 |
| No. of Kernels in the 1st and 2nd Conv Layers | No. of Kernels in the 3rd and 4th Conv Layers | No. of Neurones in the Dense Layer | Metrics | Step |
|---|---|---|---|---|
| 254 | 256 | 256 | 0.715 | 102 |
| 128 | 512 | 512 | 0.633 | 51 |
| 254 | 512 | 512 | 0.713 | 63 |
| 128 | 256 | 512 | 0.699 | 70 |
| 254 | 512 | 256 | 0.667 | 85 |
| 128 | 512 | 256 | 0.615 | 78 |
| 254 | 256 | 512 | 0.753 | 87 |
| 128 | 256 | 256 | 0.686 | 82 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pietrowski, W.; Górny, K. Enhancing the Efficiency of Failure Recognition in Induction Machines through the Application of Deep Neural Networks. Energies 2024, 17, 476. https://doi.org/10.3390/en17020476
Pietrowski W, Górny K. Enhancing the Efficiency of Failure Recognition in Induction Machines through the Application of Deep Neural Networks. Energies. 2024; 17(2):476. https://doi.org/10.3390/en17020476
Chicago/Turabian StylePietrowski, Wojciech, and Konrad Górny. 2024. "Enhancing the Efficiency of Failure Recognition in Induction Machines through the Application of Deep Neural Networks" Energies 17, no. 2: 476. https://doi.org/10.3390/en17020476
APA StylePietrowski, W., & Górny, K. (2024). Enhancing the Efficiency of Failure Recognition in Induction Machines through the Application of Deep Neural Networks. Energies, 17(2), 476. https://doi.org/10.3390/en17020476