1. Introduction
Analyzing driver behavior and electric vehicle (EV) charging are essential to the electric sector. An accurate analysis can generate strategies for planning the recharging of EVs. By comprehensively understanding vehicle behavior through real-world data and meticulously analyzing charging and mobility patterns, we can structure valuable information sources and foster knowledge that is pivotal for advancing smart grids [
1]. The stochastic nature and varying timing of charging events often lead to waiting queues or underutilized charging infrastructure. For this reason, it is important to understand charging patterns [
2]. Precisely defining the load profile of EVs significantly improves various characteristics of the power grid, such as the impact on transformers, distribution lines, overload, power quality issues, electrical efficiency, system stability, and overall reliability [
3].
This paper proposes a novel approach to clarify user behavior. It employs data analysis and a well-known clustering method to divide the fast charging data into five clusters. The results expose a new way to understand user behavior and enhance knowledge of the stochastic nature of EV charging behavior. Additionally, real-world data on EV charging are still underexplored and should be further investigated to enable proper modeling of the various charging patterns, making the models close to reality. To achieve this, this paper employs real-world fast charging data.
The continuous increase in EVs on the road presents challenges for the electric sector, introducing new loads and uncertainties. To ensure energy supply, it is necessary to anticipate and predict behaviors. However, the individual activity of each vehicle is highly unpredictable. To address this issue, cluster analysis should be utilized to analyze and predict the behaviors of groups of EV charging sessions and similar charging sessions [
4].
It is important to emphasize that EV charging behavior embraces a significant degree of stochasticity. The analysis of EV charging patterns depends on numerous factors that are difficult to predict. A deterministic model may not capture the necessary randomness for accurate modeling [
5] in such a scenario. Due to this, multiple studies establish the use of probabilistic models [
5,
6,
7,
8]. Furthermore, using real charging data in EV charging models to achieve a satisfactory result aligned with reality is imperative.
Another important aspect when trying to understand the behavior of EVs during fast charging events is the energy delivery to the battery. As shown in
Figure 1, which represents a typical charging curve from the present study’s database, the power delivery to the battery is high when the state of charge (SoC) is between 10% and 80%, increasing the charging event efficiency. This information is crucial, as drivers often interrupt the charging session by nearly 80%, knowing that charging time within this range is more efficient. This is because from around 80% to 100%, the same amount of energy takes longer to charge.
EV charging behaviors can vary based on driving behavior, battery size, seasonality, availability of time, and access to a charging station. Cluster analysis can help assess the effects and impacts of integrating electric vehicle charging infrastructures into distribution systems. Smart mobility is essential for smart cities, improving traffic flow. The use of data analysis can enhance traffic management in cities [
9]. In [
2], attributes and methods were used to predict the behavior of EVs, including initial SoC, travel time, travel distance, travel speed, day of the week, wind, temperature, and weather. The study demonstrated that as the initial SoC decreases, the probability of fast charging increases significantly. This behavior also happens as the duration of the trip increases. Furthermore, users who habitually use fast charging are more likely to do so again the following day [
2].
Additionally, it is essential to highlight the classification of charging locations, such as the regional division of residential, industrial, commercial, and highway areas, as well as the spatial and seasonal charging event distributions of weekdays, weekends, holidays, and seasons of the year [
10]. The charging behaviors of EVs can vary based on the specific behavior of each driver, the driving cycle during trips, and the capacity of the electric battery [
11]. Moreover, each parameter of EVs should be analyzed, considering factors including maximum speed, model, energy consumption, and price [
12]. Furthermore, as fast charging is typically performed during trips, user convenience and anxiety must be considered [
13].
Driver anxiety is defined as the driver’s fear of running out of battery charge during a trip. Several factors can influence this concern, such as inadequate charging infrastructure and even the reliability of the SoC readings [
14]. An adequate understanding of driver behavior requires assessing the extent of this anxiety. The anxiety intensity can be modeled as a function of the SoC, but each driver has their level of anxiety, making it challenging to predict individually. Anxiety levels typically increase as the SoC decreases, with SoC levels between 5% and 30% representing a higher probability of recharging due to anxiety [
15].
Analyzing EV charging habits and behaviors can guide drivers to consume energy more efficiently, improve user experience, and optimize energy use [
16]. However, researchers rarely apply data-driven methodologies utilizing real traffic data. Therefore, cluster analysis based on data analysis can evaluate the impact and establish guidelines and strategies for implementing EV charging in distribution systems and operating the electrical system [
11].
Therefore, this work proposes using data mining and clustering techniques to identify patterns in the charging events. By employing suitable strategies, we are able to present these behaviors comprehensively in EV fast charging events, especially to separate groups and profiles of similar charging events to understand their behavioral patterns. This approach ensures more accurate mathematical modeling and, especially, the acquisition of the stochastic nature of real-world EV charging data. The different clusters encountered by the model provide a more precise understanding of the behavior of EVs in fast charging on highways, thus offering insight into different charging profiles and charging station occupancy. Additionally, this work provides insight into how investments in charging infrastructure and related incentives can be devised to provide adequate charging capacity with minimal disruption to the power grid.
The paper has the following sequence:
Section 2 of this work presents a review about data analysis for applications in EV fast charging and potential applications in energy systems.
Section 3 introduces the proposed methodology, followed by the results and discussions in
Section 4. Finally, the conclusions are presented in
Section 5.
2. Clustering and Data Analysis Strategies for EVs and Energy Systems
Clustering is a term used to refer to a wide range of multivariate data analysis techniques focused on identifying sets of similar data [
17]. Clustering techniques and cluster analysis can identify and associate patterns in electric vehicle charging behaviors [
4,
11,
18,
19]. Additionally, clustering can also be employed in predicting the EV charging load, benefiting from data analysis techniques and the use of machine learning, such as decision tree models, artificial neural networks, and support vector machines [
20], as well as models for predicting the occupancy of EV charging stations [
21]. However, the use of clustering must be integrated with expert knowledge. This is particularly relevant in the context of fast charging clustering. Understanding the operational aspects of fast charging stations (FCSs), including the electrical quantities involved, the values of power and energy, time, charging speed, and location, is essential to obtain meaningful clusters that can aid in the operation of the energy system.
Data cleaning, reduction, and variable selection are important to the analysis. As analyzed in [
22], the data processing stage for load profiles before primary clustering aims to reduce the input data size or define more significant features for the subsequent clustering stage. This involves incorporating feature extraction techniques based on expert knowledge and data compression methods [
22].
Additionally, it is essential to consider that clustering loads have their shortcomings. Distinguishing the influence of correlations between energy characteristics in the results and the high dimensionality of the data can lead to clustering outcomes that lack practical significance [
22]. Thus, energy and power systems expertise are crucial for the selection of variables and clustering methods.
Also, it is relevant to identify driver patterns for the data analysis. In the work of [
16], various aspects related to the use of EVs are examined, including the payment method used by the driver, mobile device employed for communication, seasonal analysis of the number of charges, duration of charging events, energy transferred, times of peak recharging frequency, and geographic segmentation [
16].
Data clustering techniques are also used to assess loads with the aim of demand response [
22]. In [
23], an analysis was performed for different air conditioning uses, examining whether it is commonly used all day or at specific times, focusing on the correlation between customers. The author employs the k-means clustering algorithm due to its simplicity of implementation and repeats it five times with different centroid initialization values to refine the results [
23]. Cluster analysis can be employed to loads in energy systems, [
24] performing a cluster analysis to evaluate a set of residential loads, aiming to identify loads with high potential return in response to demand and energy efficiency programs. The authors also note that social factors highly influence loads [
24], similar to EV charging.
Various clustering methods can be found in the literature, each with its specific advantages and disadvantages for application to EV charging databases. These methods can be categorized into hierarchical and partitional clustering algorithms [
4]. Therefore, finding and evaluating clustering models that reliably represent charging behaviors and can predict and mitigate the effects of fast charging on power systems is essential. The hierarchical clustering method is quite flexible and has been used in various studies on clustering loads in electrical systems [
22].
In [
8], the stochastic nature of EVs was analyzed through historical data and data mining using clustering and kernel density estimation. The paper captures charging behavior regarding timing, frequency, and demand across different drivers. It was concluded that it is important to group different drivers, as there is a significant variance in behavior. Also, the authors point out the need for network reinforcement and the adoption of smart charging technologies to prevent future system overload due to the increase in charging sessions for specific types of drivers [
8].
In [
25], the authors employed a data-driven approach using unsupervised methods. The model identifies charging patterns and then using a probabilistic framework generates charging demands. The initial division of the agglomerative clustering resulted in 5 clusters, and by end of the tree, 16 clusters of drivers were identified. The model is primarily based on historical charging data, including timing, energy, rate and location of each charging sessions [
25].
In [
19], recurring patterns were identified using cluster analysis with the k-means algorithm; this is an unsupervised classification method, primarily analyzing charging start times and dividing the charges into five clusters for analysis [
19].
A data-driven approach for user categories and charging sessions is presented in [
26]. The authors propose a dual strategy: first, a clustering proposal based on identifying portfolios and patterns, and then a geographic method, considering geographical data, the maturity and density of charging points, and vehicle properties. A Gaussian mixture model revealed 13 types of charging sessions based on connection time, duration, time between sessions, and distance between sessions [
26].
In [
4], a comprehensive review of data clustering methods and their applications in various fields related to EVs was conducted. Also, the authors point out that agglomerative clustering can be employed for long-term planning of EV loads and is suitable for capturing uncertainties and heterogeneous charging behaviors, including charging cycles and sessions [
4,
25].
Additionally, optimization methods are also employed. For instance, in [
27], the authors considered traffic data and charger utilization rates, proposing a multi-objective planning method for charging EVs. It is mentioned that the planning method can effectively enhance the utilization of new chargers in the planned area and improve the EV user experience, thus optimizing energy use [
27]. In [
28], a new optimal planning algorithm was developed that accounts for the stochastic nature of EV flow and charging demands. The proposed structure determines an ideal set of additional energy to be extracted from the grid and the optimal number of chargers, considering waiting time and the size of the charging infrastructure [
28]. In [
29], the authors examine the impact of charging on distribution systems using the CPLEX tool, exploring different scenarios. The authors aim to smooth out the load demand by proposing a demand peak indicator incorporating the original system peak, the peak with EVs, and the peak after the proposed optimization. They concluded that the impact can be minimized, although introducing renewable energy changes the portfolio of the charging infrastructure [
29].
Finally, estimating the ideal number of clusters must be addressed to make it simple to understand the differences between the groups of charging events. Fewer clusters can simplify the visualization and interpretation of the data. Several methods for determining the optimal number of clusters can be found in the literature [
30]; the elbow method is commonly used to estimate the ideal number of clusters in an analysis. This method effectively identifies the appropriate clusters by calculating the sum of squared errors within the clusters. In [
31], the elbow method was employed to evaluate the ideal number of clusters. The authors highlight that the technique is easy to compute but can produce inconsistent results [
31]. This underscores the importance of assessing results with specialized knowledge.
It can be concluded that clustering models for charging sessions can efficiently identify distinct EV charging profiles. This can reduce pressure on energy generation while improving voltage levels and network stability [
32]. Finally, improvements in energy planning models are important for the analysis and enhancement of environmental aspects as EVs are being incorporated into the energy system [
33].
2.1. Electric Vehicles
The most common vehicles in the industry today are internal combustion engine vehicles (ICEVs), which use a combustion engine; hybrid electric vehicles (HEVs), where both an electric motor and a combustion engine are used to power the vehicle; and all-electric vehicles (AEVs), also known as battery electric vehicles (BEVs), which are powered exclusively by batteries. Additionally, plug-in hybrid electric vehicles (PHEVs) are similar to HEVs but can also be charged via the electric grid [
34]. In this study, BEVs and PHEVs are the focus and are referred to as EVs.
EV charging is categorized into Category 1, which corresponds to alternating current (AC), and Category 2 referring to direct current (DC). Category 1 is further divided into slow charging (<7.4 kW), medium-speed charging (7.4 kW ≤ X ≤ 22 kW), and AC fast charging (>22 kW). Category 2 is divided into DC slow charging (<50 kW), DC fast charging (50 kW ≤ X < 150 kW), ultra-fast Level 1 charging (150 kW ≤ X < 350 kW), and ultra-fast Level 2 charging (≥350 kW) [
35]. This study specifically focuses on public fast chargers, categorized as DC charging with a maximum power of 60 kW.
2.2. EV Charging Patterns Applied on Energy System Studies
EVs are considered one of the largest sources of growth in electricity demand and are also seen as a highly flexible resource from the demand side. The introduction of EVs is sometimes discussed as a solution for distribution networks with inadequate infrastructure. However, without anticipating load behavior, EVs are far from being stabilizing agents and tend to lead networks toward instability. Instead of supporting the networks, it is common for charger controls to disconnect from the grid and halt charging in networks with poor infrastructure or other conditions, such as low voltage or phase loss. The destabilizing effect of battery-centered technology with constant power behavior is well-known among EV chargers and can be critical when chargers reach significant load levels on the grid.
Introducing more chargers increases the presence of electronic components in the network, reducing the system’s total inertia [
36]. Voltage instability and frequency deviation are adverse effects of uncontrolled EV charging stations on the grid. According to [
37], studies and research on the interaction of EVs with networks with inadequate infrastructure should be conducted based on optimization, forecasting, and intelligent control.
Flexibility in electricity consumption refers to the ability to adjust usage over time to mitigate load and demand peaks and reduce fluctuations in generation and load. The electricity flexibility is also important to significantly increases the penetration of renewable energy sources [
38]. Using the flexibility of EV charging and knowledge of charging behavior, efficient charging scheduling and distributed renewable generation can improve the energy system’s performance [
39].
Power systems were not initially designed for this type of new load, and the impact caused by the new load from EVs must be addressed [
40]. Therefore, it is necessary to implement load management measures to mitigate consumption peaks [
41], as well as load forecasting modeling.
In [
42], a load forecasting methodology is introduced that leverages a deep understanding of electric vehicle driving and charging patterns to improve the accuracy of forecasting models. In our previous study, we developed an adaptive charging simulation model to obtain the charging load profiles of many EVs [
43], aiming to support several research areas related to EVs.
Given the increase in EVs on highways, it is easy to recognize that high-power and uncoordinated EV charging can be critical for the power grid [
41]. Strengthening the power grid, which maintains the balance between supply and demand, is fundamental to ensuring the energy system’s stable operation [
13].
Models of demand response are used to shift consumption to different times, as empowered consumers can move their usage to other periods. Depending on logistics and other requirements, the load can be utilized at a different time [
44]. In the case of shifting loads for fast EV charging, the challenge lies in the planning and timing of the charge and the driver’s anxiety about charging. Another challenge in highway charging lies in the user’s interest in minimizing the charging time, so stop-and-go charging.
Load shifting is evaluated in [
45]. The authors aim to guide consumers in properly using FCSs. This study analyzes the load shape by normalizing the energy system’s load profile and the FCSs. Additionally, it assesses how price signals effectively shift load to other periods [
45].
In [
46], two methods for evaluating charging modes were compared to examine the impact on energy of EV charging. The charging modes are described as user-driven or cost-driven, controlling the power delivered based on the SoC. It was concluded that a slight relaxation in the fully user-driven mode results in smoother charging curves. The system’s peak load can be substantially reduced if vehicle drivers agree to charge only a fraction of the battery capacity as soon as they connect to the grid rather than charging it fully as quickly as possible [
46]. In [
47], a diffusion model for EVs was developed to shift the timing of charges. The study concludes that shifting is feasible for both home and workplace charging. Furthermore, 25–30% of renewable generation can be integrated with load shifting. The authors highlight that the topic of public fast charging could be a field for future research. [
47].
In addition to defining load profiles for demand control, predicting EV load is crucial. A deep understanding of driver behavior regarding charging is essential. Spatiotemporal, statistical models and data mining are typically employed to predict distributions [
42]. However, accurate load forecasting for electric vehicles is challenging due to the high degree of uncertainty in driver behavior [
48]. In [
48], a rough artificial neural network approach was applied to predict the travel behavior of EVs and their load profiles for various forecasting methods in the distribution network [
48].
Understanding the load behavior caused by EVs is essential. Additionally, as the number of charging sessions increases over time, an approach to schedule charging events becomes crucial. This ensures the efficient allocation of resources, minimizes potential conflicts, and optimizes the overall charging process. Strategic planning allows us to accommodate the growing demand and maintain a smooth and effective operation. Consequently, the work proposed in this article provides a valuable tool for identifying patterns in EV charging behavior, an area of research that still presents many challenges for system planners.
3. Methodological Approach
The methodology was developed using the Python programming language, version 3.12.4 through the ANACONDA package in the Spyder Integrated Development Environment IDE 5.5.1 and Pandas, NumPy, Matplotlib, Scikit-learn, and Yellowbrick libraries. It was executed on a workstation with an Intel(R) Core i7-13650HX CPU, 16 GB of RAM, and a Microsoft Windows 11 operating system.
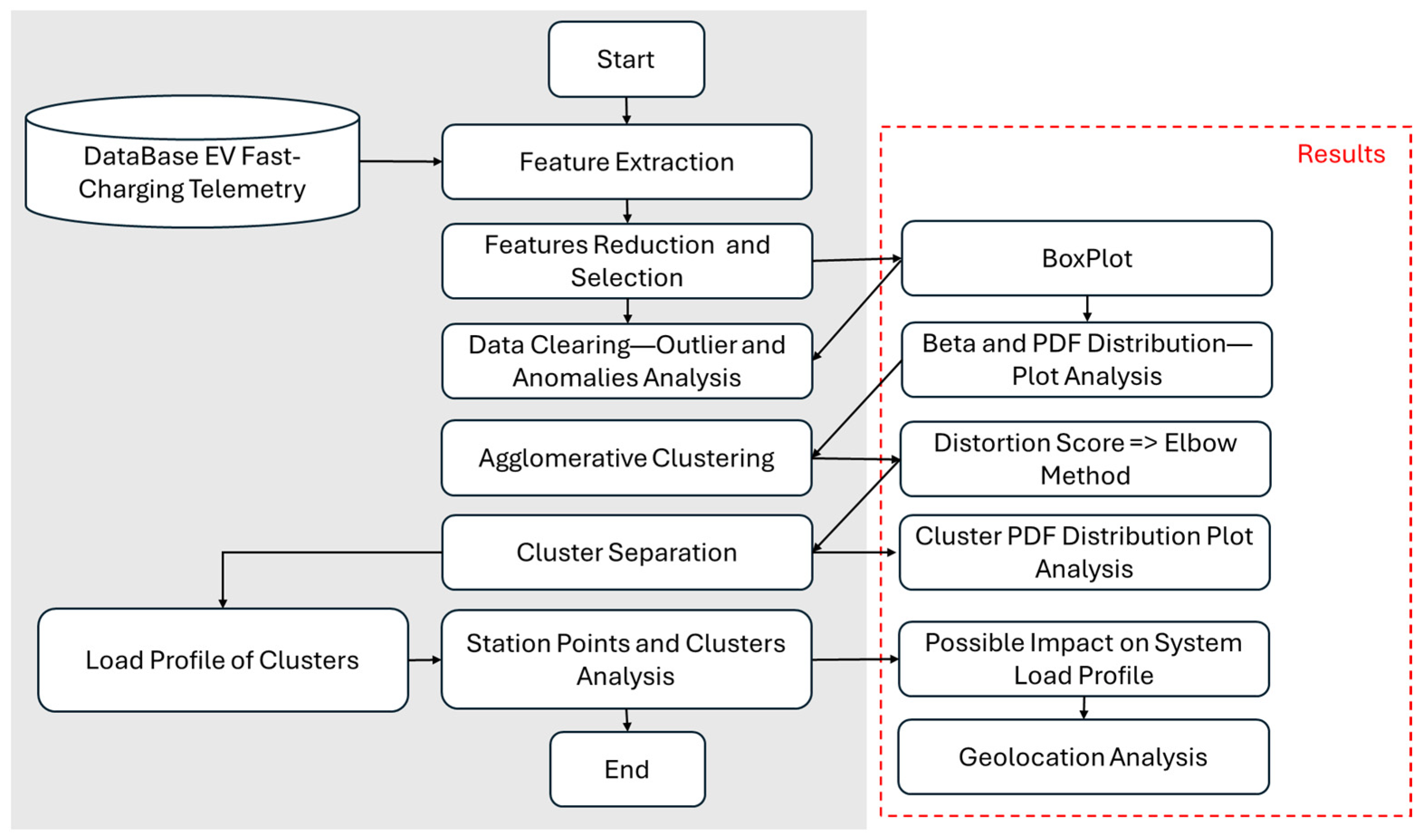
Thus, the composite methodology used statistical and probabilistic real data analysis. The work followed the flowchart in
Figure 2, which consists of data extraction, validation, clustering, and results. These data were obtained from 10 highway FCSs and collected through open charge point protocol (OCPP) telemetry from the FCSs with capture intervals of approximately 2 min. Afterward, important attributes are processed and extracted from the telemetry data. A multivariate analysis of the data is conducted using clustering techniques. Subsequently, a univariate analysis of the obtained results is performed. Finally, an analysis of the load profiles and the found scenarios is conducted, as well as an analysis of the geolocations of the FCSs.
First, a detailed preliminary analysis of the charging events was conducted to identify and extract the essential characteristics to understand charging behavior accurately. Using telemetry data from the FCSs, various significant attributes were collected and recorded, including the initial SoC of the battery at the start of the charging event, the SoC at the end of the process, the average power supplied to the battery during the charging event, the total amount of energy consumed by the vehicle during the charging process, and the total duration and the day of the charging event. Additionally, time-related attributes were captured and recorded, such as when the charging event occurred and the day of the week it was performed.
Next, records considered erroneous or indicative of charging event failures. BoxPlot visualizations were employed to assess data dispersion and identify outliers. Based on these visualizations, filters were applied to remove such records, ensuring the data quality used in subsequent analysis.
Subsequently, a general data analysis was conducted using kernel density estimation to visualize the distribution of variables before proceeding to multivariate analysis alongside beta distribution for future models. This step allowed us to have a broader understanding of the data and identify possible patterns or trends that may influence cluster formation. Following this, a multivariate data analysis was employed for clustering. The elbow method was used, which analyzes the variation in inertia (sum of the squared distances of samples to their nearest cluster center) in the number of clusters, identifying where the increase in cluster numbers does not result in a significant reduction in inertia. Considering these metrics, we arrived at a suitable set of clusters that best represent the underlying data structure, allowing for more precise results.
Then, focusing on cluster analysis, the distortion metric was selected to assign the optimized number of clusters, which calculates the sum of the squared distances of each point to its center. We let
be a set of points and
be the set of cluster centers. Equation (1) expresses the relation. The elbow point, which indicates the optimal number of clusters, was at 5.
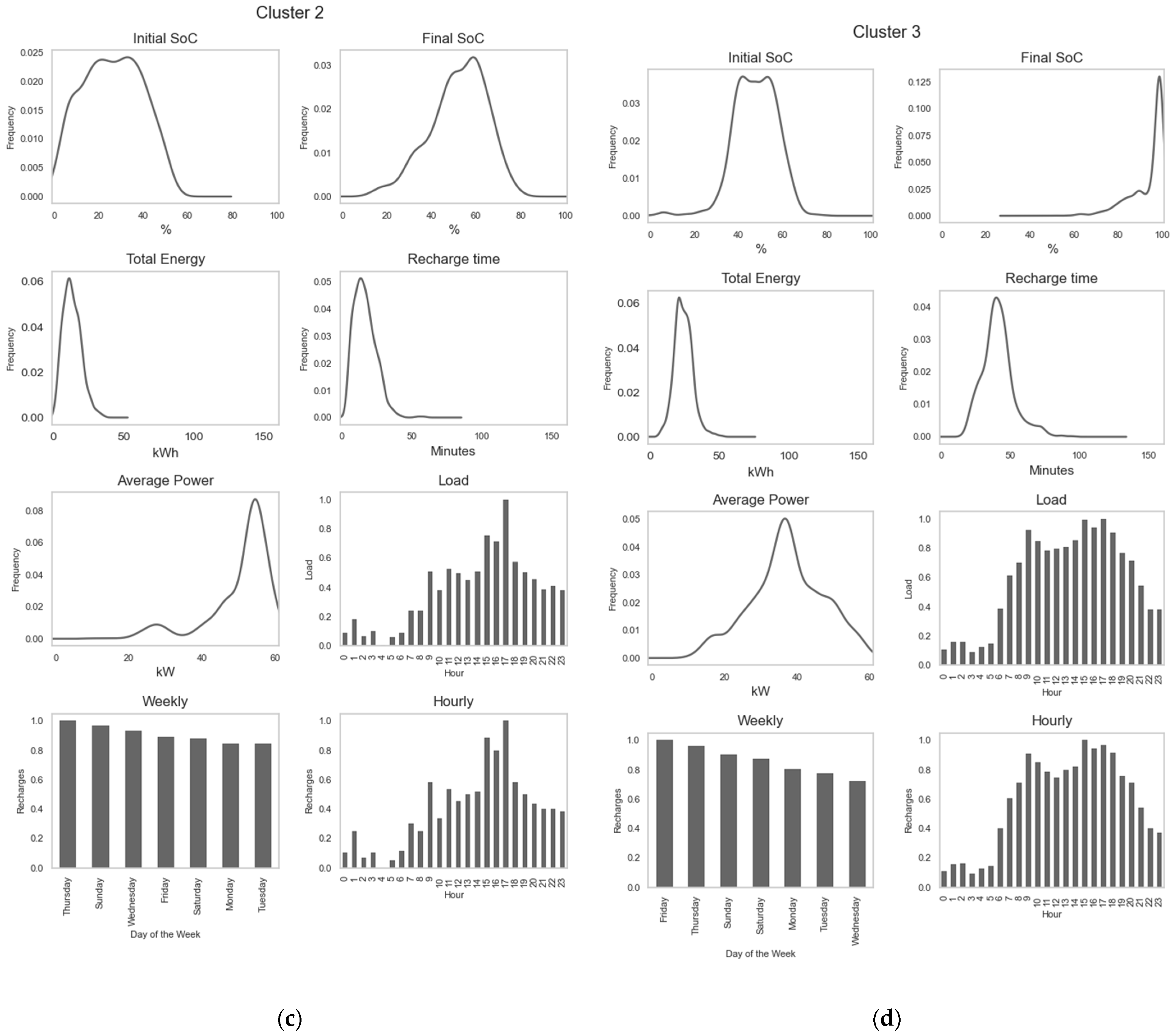
The internal analysis of the clusters is important for understanding the underlying patterns of the charging events. The inputs, average power, energy consumed, SoC variation, final SoC, initial SoC, day of the month, and total recharge time of the cluster model are demonstrated in
Figure 3. After the computed model, the kernel density estimation method examined the distribution of charging events within each profile. This allowed for a visualization of how the charging events are distributed and identified possible patterns.
Following the calculation of the densities of each cluster, a graphical analysis is performed to compare the distributions of the internal variables within clusters. This can reveal insights into the differences or similarities between the charging patterns in each group. Differences between initial and final SoC, power or energy delivered, and whether there are charging peaks at specific times of the day or significant seasonal variations are observed.
Finally, the impact of each cluster on the power system load is evaluated. The methodology covered temporal aspects of charging demand, which are applied to drivers from specified clusters. It determines the clusters’ charging sessions and aggregates the charging load profile to examine and analyze how the load profile of each charging cluster affects the power profile. By better understanding the charging patterns within each cluster and their impact on the power system, more effective strategies to manage demand growth can be developed, promoting the system’s energy resilience.
4. Results and Discussion
In the analysis conducted in this work, 5918 fast charging events were extracted, spread across 10 FCSs with a maximum power of 60 kW, during the period from 28 August 2023 to 14 June 2024. The FCSs are located on highways, as shown in
Figure 4, in the state of Rio Grande do Sul, Brazil, with FCS C and FCS F situated near major urban centers. Initially, calculations were performed to determine the characteristics of average power, energy consumed, variation in SoC, final SoC, initial SoC, day of the month, and total charging time based on the charging curves from the telemetry data of the FCSs.
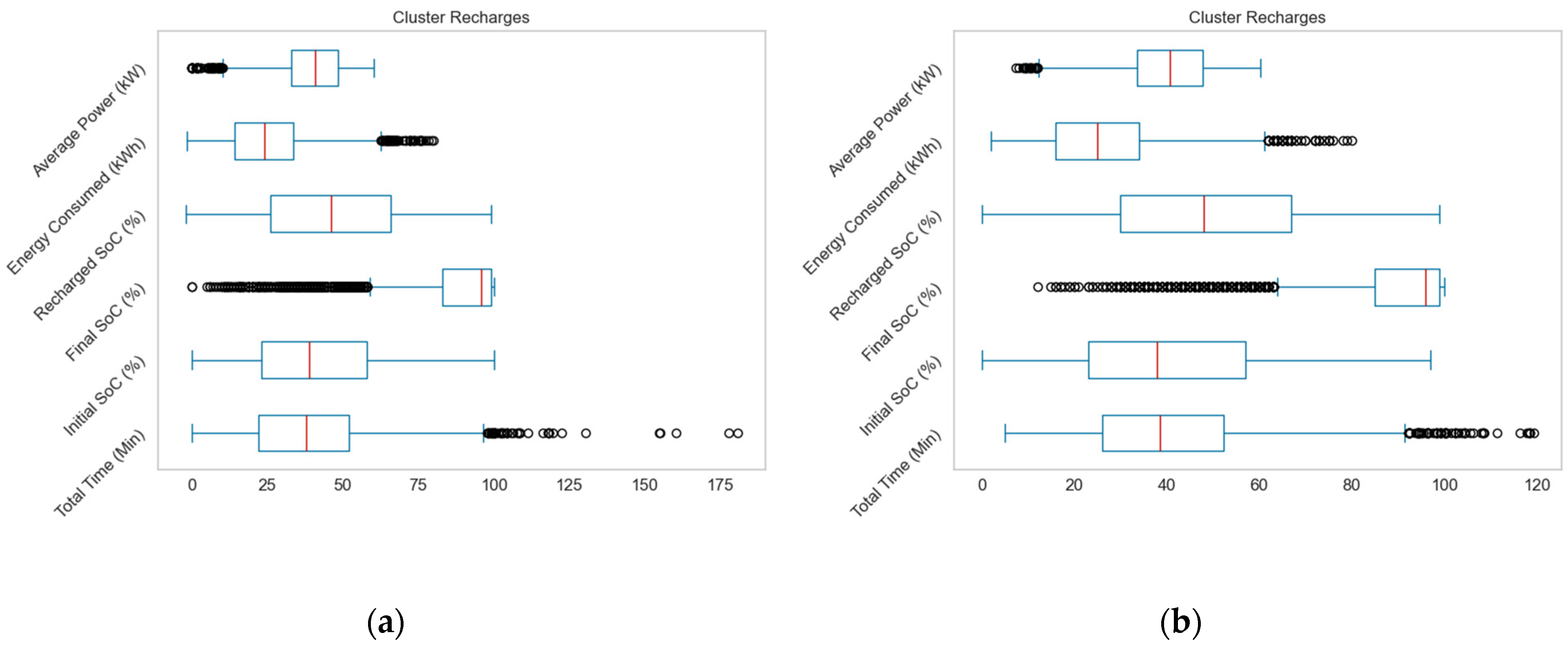
The initial cleaning was based on the charging time series, where values with the recorded current as zero were removed, as they represent erroneous records. Although these records were logged, the information on the SoC and other parameters was not recorded correctly. From the BoxPlot in
Figure 5, by observing meager power, time, and energy consumption, false or anomalous data were removed based on established rules. Additionally, in
Figure 5 the circles represent the outliers, and the box represents the quartiles and the median. Rules were established for charging events with a low probability of being valid, and the three rules for removal are defined in Equation (2).
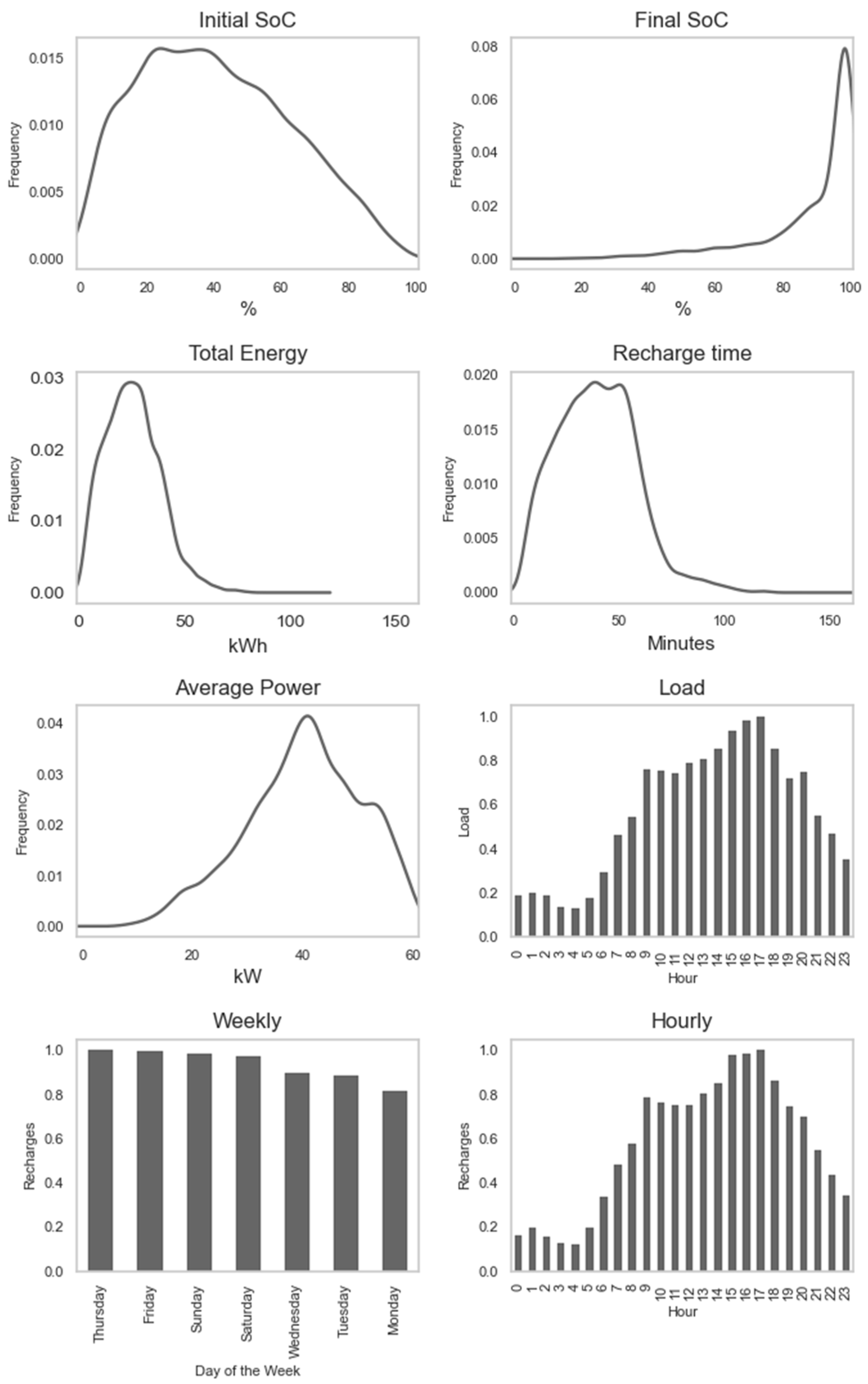
Figure 6 shows important driver behavior characteristics, such as the highest probabilities for a charging event on Thursday, Friday, Sunday, and Saturday and the most common times between 3 PM and 5 PM. The final SoC has a distribution that is heavily skewed toward 95%, and the initial SoC is highly asymmetrical toward a low initial SoC. It is also worth mentioning that energy, time, and power resemble a normal distribution. Moreover, the days of the week with the highest number of charging events are Thursday, Friday, Sunday, and Saturday, which are nearly equally distributed, as shown in
Figure 6; the other days have fewer charging events.
This study also proposes using the beta distribution for parameters and variables such as charging time, total energy, initial SoC, final SoC, and average power, as exposed in
Table 1, and it can model the charging behavior of electric vehicles. The beta distribution’s flexibility in modeling random variables is advantageous, though it is limited to a finite interval.
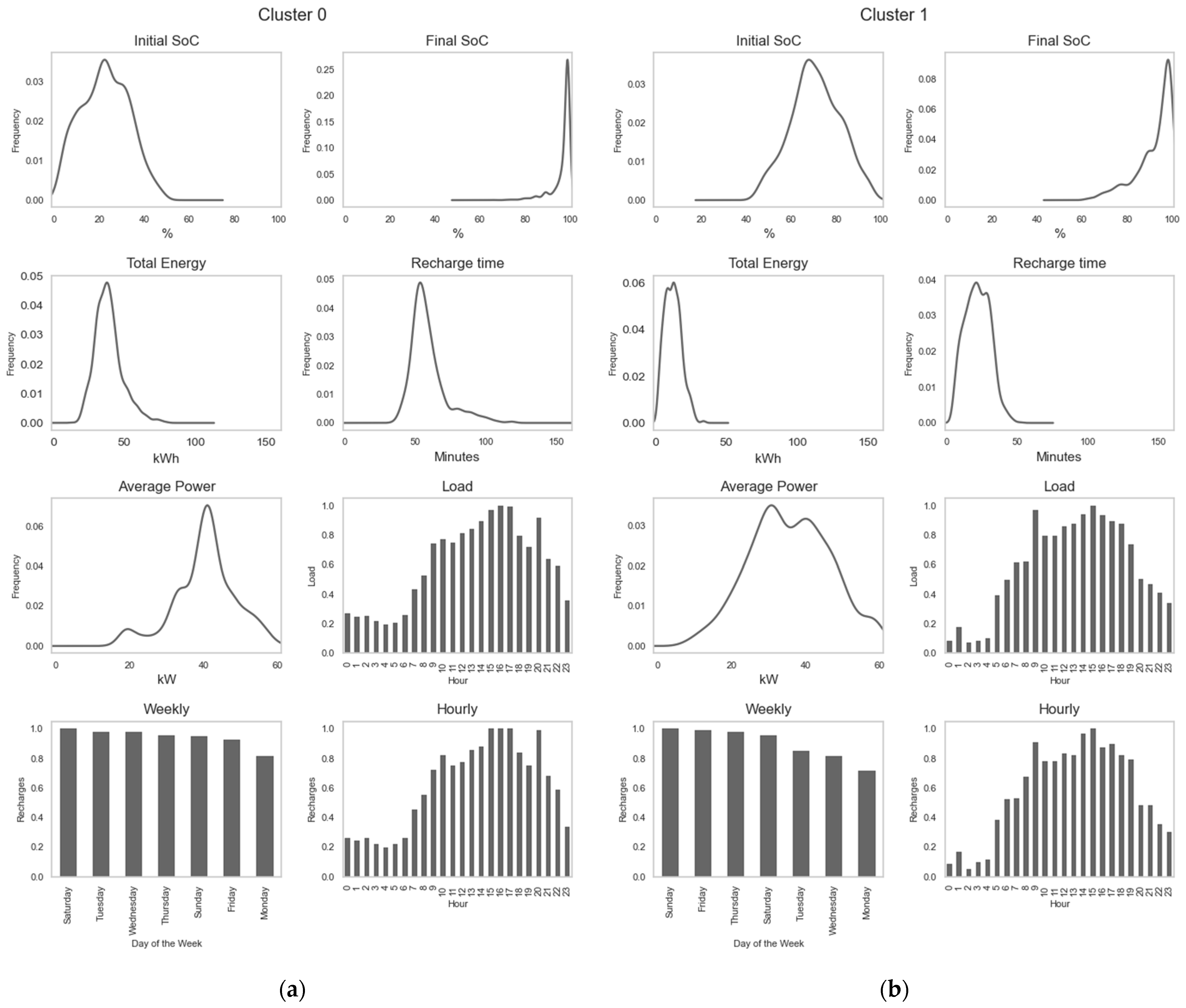
The defined number of clusters was separated using the agglomerative clustering algorithm, with the Euclidean distance metric applied, the number of clusters was selected according to
Figure 7. Kernel density estimation was applied to the variables to establish the pattern of each cluster, as show in
Figure 8. Typically, studies use a higher number of clusters [
25,
49]. By selecting fewer clusters (five), we can enhance the understanding of the clusters without significantly losing details.
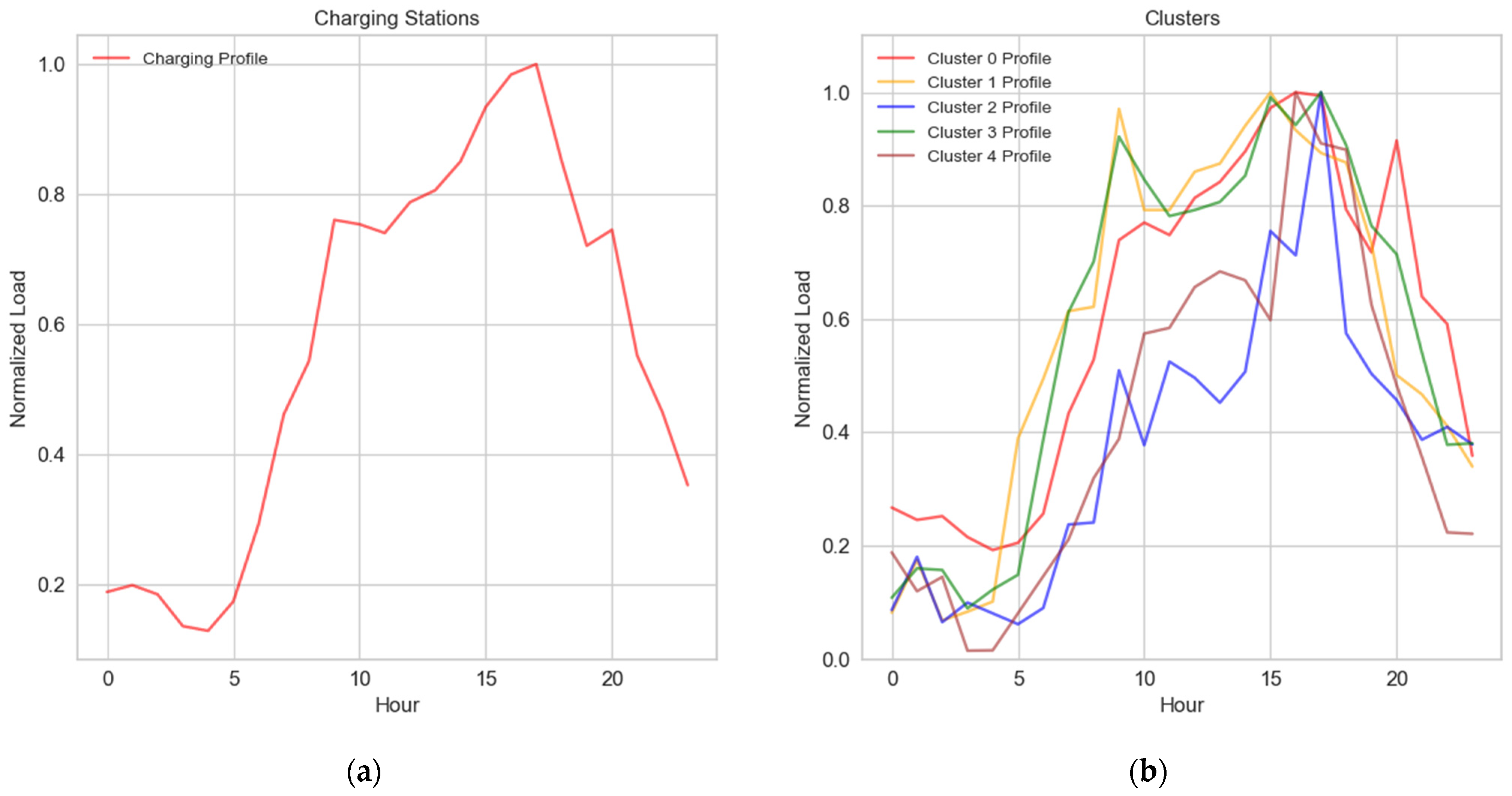
Regarding the load profiles, as shown in
Figure 9, Clusters 2 and 4 exhibit a significantly low normalized load estimated until 15:00, after which they align with the profile pattern of other clusters. It is important to highlight peaks at 20:00, related to Clusters 1 and 3 and Cluster 0 at 18:00. Thus, the loading peak between 15:00 and 17:00 aligns with results in other works [
15,
45] that shows a peak from 15:00 to 21:00. Yet the 06:30 peak for residential EV charging in [
6] underscores the necessity of an adaptive loading management [
6,
15,
45].
Considering that power fast charging is high, clusters that have less impact on system load during off-peak system hours could receive incentives to continue charging during these times. On the other hand, clusters with more charging events and a load that coincides with the peak of the system load, which could lead to over-loads, could receive incentives to charge at other times, potentially resulting in higher tariffs to reduce demand.
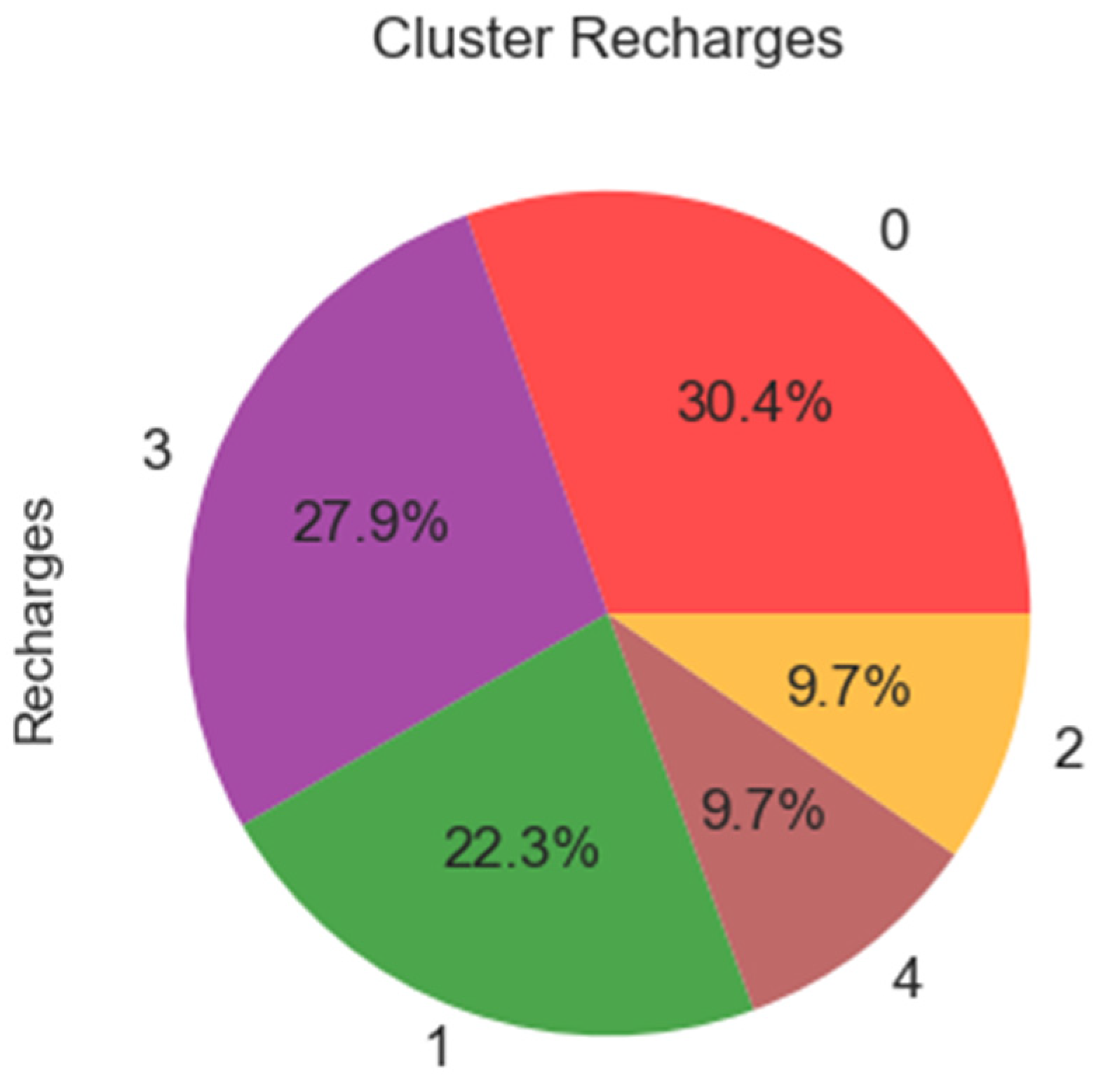
Also, in
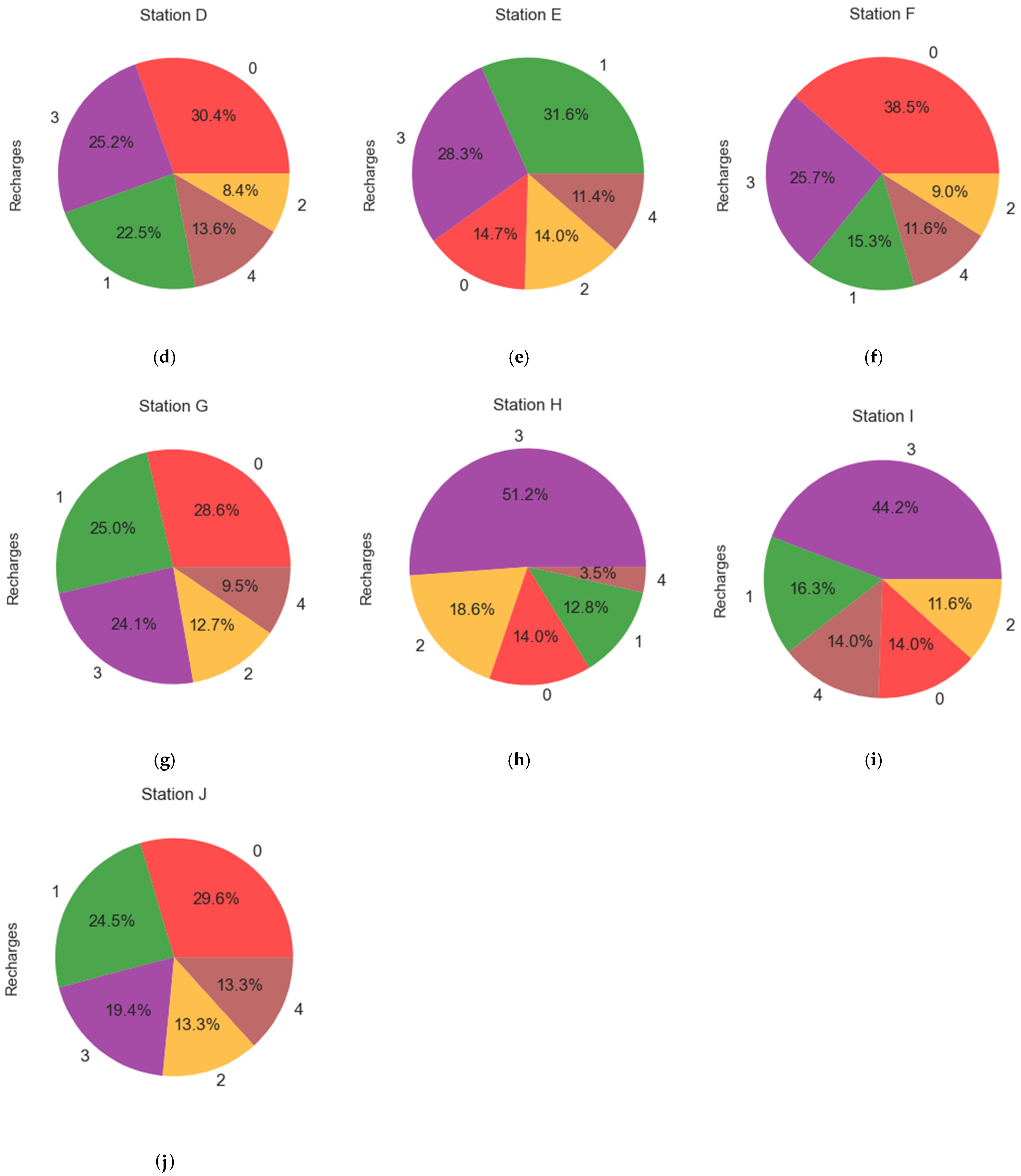
Figure 10, it is highlighted that the most recurrent cluster across all FCSs is Cluster 0, followed by Cluster 3 and Cluster 1. These clusters represent situations where the charging is carried out until the state of charge is close to 100%. In other words, users complete the charging until the battery reaches maximum energy. This behavior suggests that, in these clusters, users likely need to ensure maximum range for their vehicles.
The less frequent clusters are Cluster 4 and Cluster 2, where users do not charge the battery 100%. This may indicate situations where users perform partial charging events, possibly due to time constraints, immediate mobility needs, or lack of necessity for a full charge. This variation in charging behavior may be related to different vehicle usage patterns, such as short versus long trips or the availability of charging infrastructure along routes.
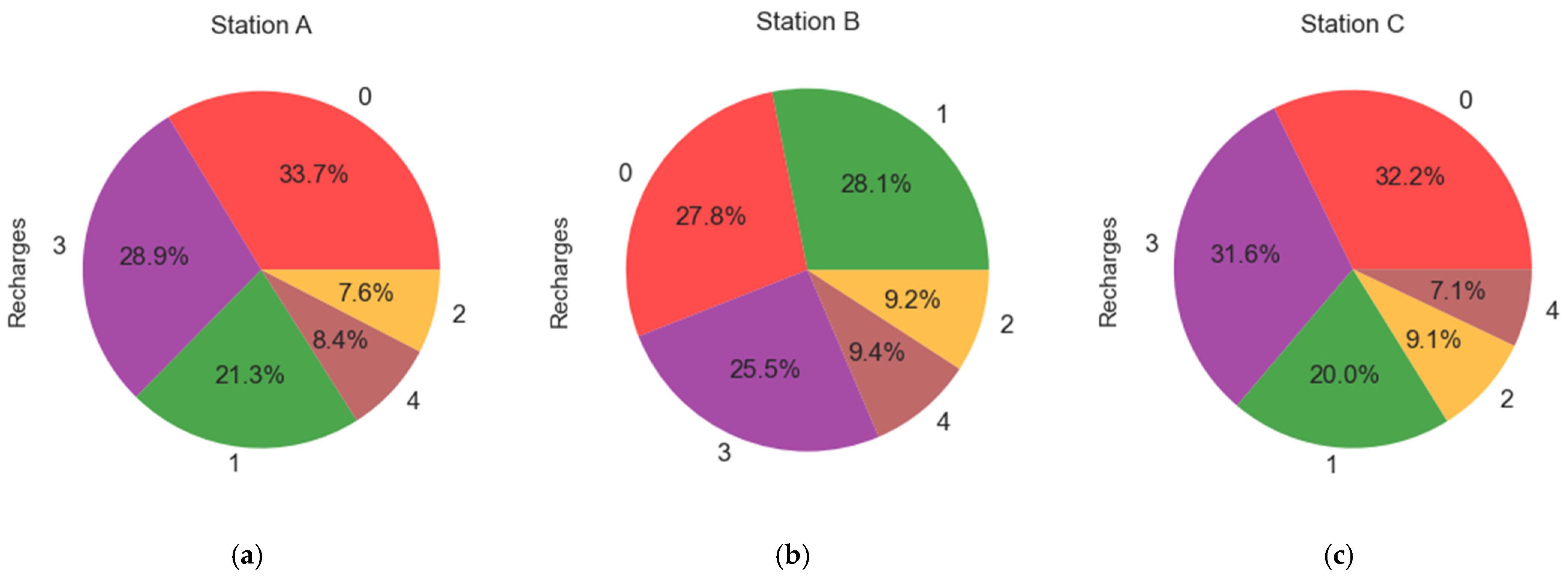
Table 2 summarizes the five identified most important and distinctive characteristics of the clusters. Notably, FCSs B, E, J, and I are installed in areas far from major urban centers. These FCSs, among others, are positioned where charging patterns during longer trips are more likely to be established. In contrast, FCSs near urban centers exhibit distinct patterns.
FCSs A, C, D, F, and J form a group where the most common charging patterns follow the order of Clusters 0, 3, and 1, as indicated by the data from this work. This is combined and analyzed with the order of the clusters in the pie plots in
Figure 11, indicating that the driver leaves the FCS with a 100% SoC. The work of [
50] shows that one predicted factor for fast charging choice is the remaining distance to the next FCS, without deviation from the original route, even though most FCSs are near big cities, where others FCSs are found to be more easily [
50].
In [
51], the authors report that most fast-charging events reach approximately 80% of the final SoC [
51]. However, the present study differs as it considers users on long trips who currently prefer to charge full charge due to concerns about the reliability of nearby chargers. As infrastructure improves and the number of FCSs increases, this behavior may shift, allowing users to spread out charging sessions over shorter intervals and more stops. Moreover, in this study, the availability of free FCSs is a significant point. Typically, users can access cheaper charging options at home [
52]. However, the free FCSs encourage users to leave with a 100% SoC.
At FCSs B and E, it is observed that most charging events belong to Cluster 1, which may also indicate charging events performed by users concerned about running out of charge due to long trips. This assumption is based on the distance of these FCSs from major urban centers and charging facilities, leading users to initiate a charging event even when their SoC is around 70%.
Additionally, FCSs H and I show Cluster 3 as the most frequent, where users, even with a 50% SoC, perform charging up to 100%. Also, in FCSs B and E, the most frequent user starts charging with an approximate 80% SoC. In these last two cases, it can be inferred that most charging events are motivated by anxiety and precaution to ensure the necessary range for their trips.
5. Conclusions
The behavior of users in the EV fast charging environment presents a multifaceted challenge. Predicting and understating user behavior remains difficult for different reasons, including individual preferences, varying charging needs, situational factors, and location availability. The data analysis of FCSs on highways and the clustering analysis conducted in this study highlight the diversity in user behavior, try to understand the influencing factors, and emphasize the necessity for adaptive groups of users to arrange typical user behavior.
Given this, our study presents a valuable analysis, emphasizing the need to develop user-centric solutions in the evolution of charging infrastructure. As the adoption of electric vehicles continues to rise, further research and more sophisticated models will be essential to better understand and accommodate the diverse needs of EV users. The observations made in this work are essential for clarifying user behavior. They can guide the optimization of the charging infrastructure, ensuring that the needs of different user group profiles are efficiently met.
In future work, the beta distribution and kernel estimation distribution will be used for parameters such as charging time, total energy, initial SoC, final SoC, and average power, as it can model the charging behavior of electric vehicles. By leveraging those distributions, researchers can more accurately represent the uncertainty associated with these variables. Ultimately, other studies can also address the challenges of demand response and load forecasting.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}