The literature review shows that many factors can influence the energy consumption of electric vehicles. They can be categorized into three primary types: driver behavior, vehicle characteristics, and driving conditions [
10,
11,
12]. So far, most of the literature in this area has focused on vehicles with conventional internal combustion engines (ICEV) [
13,
14]. Researchers have shown that road conditions, traffic intensity, driver demographics (e.g., age and gender), and car weight influence driver behavior [
1]. For instance, Faria et al. [
15] evaluated the potential for fuel savings in internal combustion engine vehicles by considering driving style, road type, and road gradient factors. They found that the most significant fuel savings occurred on secondary and collector roads with a speed limit of 50 km/h (31 mph). However, the study did not address the energy consumption of electric vehicles. Researchers examined the variation in urban driving patterns and determined that the street type had the most significant effect on the driving style of internal combustion engine vehicles [
1]. Moreover, this study showed that the average speed value differs significantly with the type of roads on which the vehicle travels. Jensen [
16,
17] conducted a comparable study, analyzing various driving patterns and the emissions of internal combustion engine vehicles on different road types. The study concluded that speed is the primary factor affecting emissions, while variations in road speed do not account for fuel consumption differences. The research also found that fuel consumption was slightly higher on expressways than on motorways.
Literature data show that the findings regarding energy consumption of ICEVs do not apply to EVs. Therefore, the energy consumption of an EV in relation to the speed is fundamentally different from that of an ICEV. According to the Galvin model, the minimum energy consumption in EVs is at 60 km/h, after which it increases exponentially [
18]. These findings were later confirmed by Fiori et al. [
19] and Liu et al. [
20] and show that EVs achieve the highest efficiency at lower speeds, which is completely different from ICEVs. Speed and its changes vary significantly depending on the type of roads. Therefore, road type is expected to be an important factor in the energy consumption evaluation analysis of EVs [
18,
19,
20]. In ICEVs, frequent braking and acceleration significantly increase fuel consumption compared to maintaining a constant speed, e.g., while driving on a motorway [
15]. This effect may be different in electric vehicles due to the possibility of charging the batteries during deceleration [
21]. Moreover, EV performance is more sensitive to ambient temperature than ICEV. At low temperatures, energy consumption in EVs increases due to higher battery storage losses [
22,
23,
24] and internal resistance [
25]. Therefore, it is important to thoroughly understand the various factors that can influence the energy consumption of electric vehicles. Selected scientific publications initiated this process using different research methods. For example, Faria et al. examined the impact of the air conditioning system (i.e., off, on, cooling, heating on), driving style (i.e., aggressive, moderate), and the degree of urbanization of the area (i.e., urban, rural) on energy consumption [
23,
26,
27]. In the study, they demonstrated the negative impact of aggressive driving behavior and quantified the relationship between energy consumption and driving conditions. Franke et al. [
28] confirmed these findings by examining the impact of adopting an eco-driving style on the efficiency of EVs. The authors found that economic driving significantly reduced the energy consumption of EVs [
28]. Kurien et al. modelled the energy consumption of EVs using acceleration and inclination as input parameters in MATLAB Simulink [
29]. The results show that the EV performance decreases with speed and increasing slope. In other words, steep slope angles and travelling at high speeds have been found to significantly limit the achievable range of electric vehicles.
While research on combustion engine vehicles shows that energy consumption increases with speed and acceleration [
1,
9], there is limited investigation into how driver-related factors affect energy use in electric vehicles. Yao et al. [
21] gathered data from Beijing’s road network to estimate energy consumption and emission rates for electric vehicles, finding that energy use was notably higher on major thoroughfares than on other road types. Wu et al. [
30] posited that city driving consumes more energy than highway driving, but their study did not account for driving style and categorized trips broadly. Additionally, Bingham et al. [
31] discovered that aggressive driving could boost average energy consumption by 30% or more and that managing traffic to reduce rapid acceleration and deceleration could further save energy and extend the range. However, Bingham et al. did not explore the link between road type and energy consumption in their study [
31]. Fetene et al. [
32] researched road types, but their findings showed no significant difference in consumption rates between on- and off-motorway driving, though this was based on a single measurement. This highlights a gap in the literature regarding the impact of road type on electric vehicle efficiency. Although previous studies suggest that driving style and road type significantly affect energy consumption, precise conclusions still need to be made. Accurate knowledge of energy efficiency for various road sections is essential for modelling and planning energy-optimal routes. Electric vehicle drivers often choose routes they believe will lower energy consumption [
32], but this behavior needs more scientific validation. Most existing studies rely on simulations, and real traffic condition studies are scarce. Currently, only manufacturer-provided energy consumption and range figures from laboratory tests are available, which are presumed to differ from real-world consumption [
33,
34]. Eco-driving typically promotes reducing the use of both the accelerator and brake pedals [
22,
35,
36], a recommendation supported by research. For instance, Pelkmans et al. identified acceleration as the primary factor affecting fuel consumption [
37], while Yan noted that variations in energy consumption were mainly due to different accelerator pedal usage [
38]. How the accelerator is used impacts acceleration; thus, reaching the optimal speed significantly influences energy consumption. Laboratory tests comparing energy consumption across electric vehicles, hybrids, and internal combustion engines (ICEs) in city and motorway driving conditions reveal that electric vehicles generally perform better than ICEs and hybrids at lower speeds and in intermittent urban settings but less so on highways [
1,
12]. Knowles et al. [
10] observed similar results with real-world trips, finding that electric vehicles performed better on interrupted city routes than motorways, mainly due to their regenerative braking system (RBS). This system converts some of the vehicle’s kinetic energy back into electrical energy during deceleration, then stores it in the battery [
11,
18,
25,
39,
40]. However, it’s important to note that more aggressive driving styles, characterized by rapid acceleration and braking, can increase energy consumption, which challenges this notion [
18]. The driving efficiency also depends on the balance between energy recovery during deceleration and energy consumption during acceleration. Since energy recovery is typically less than energy consumption, there is a point where erratic, slower driving becomes less efficient compared to faster, steadier driving. Few studies address how vehicle speed [
23] and acceleration [
4,
23] significantly impact energy consumption. Therefore, there is currently a gap in the literature regarding the identification and evaluation of EV energy consumption in real driving conditions. Investigating this relationship was the aim of this article. It was assumed that the impact of acceleration and speed on energy consumption in electric vehicles is significant and its modelling is possible. The research used data from the electric vehicle, which was moving both on a motorway and in built-up areas. The analysis was aimed at assessing the consumption and recuperation of electricity depending on the type of driving cycle. Based on data on the distance travelled and vehicle speed in various cycles, a detailed analysis of the dependence of instantaneous energy consumption and recovery (Instantaneous Energy Consumption, IEC) on factors such as vehicle acceleration and speed, but also motor speed, battery power, and battery current was carried out [
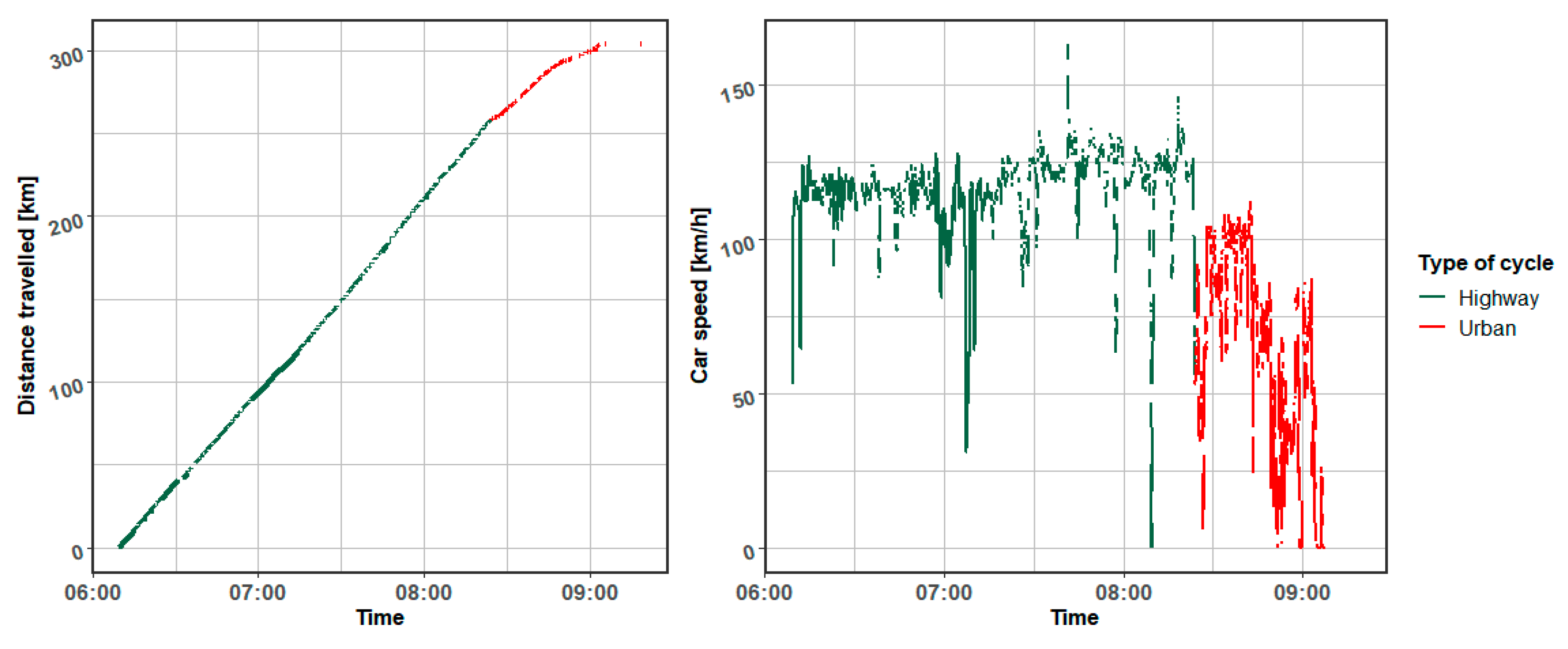
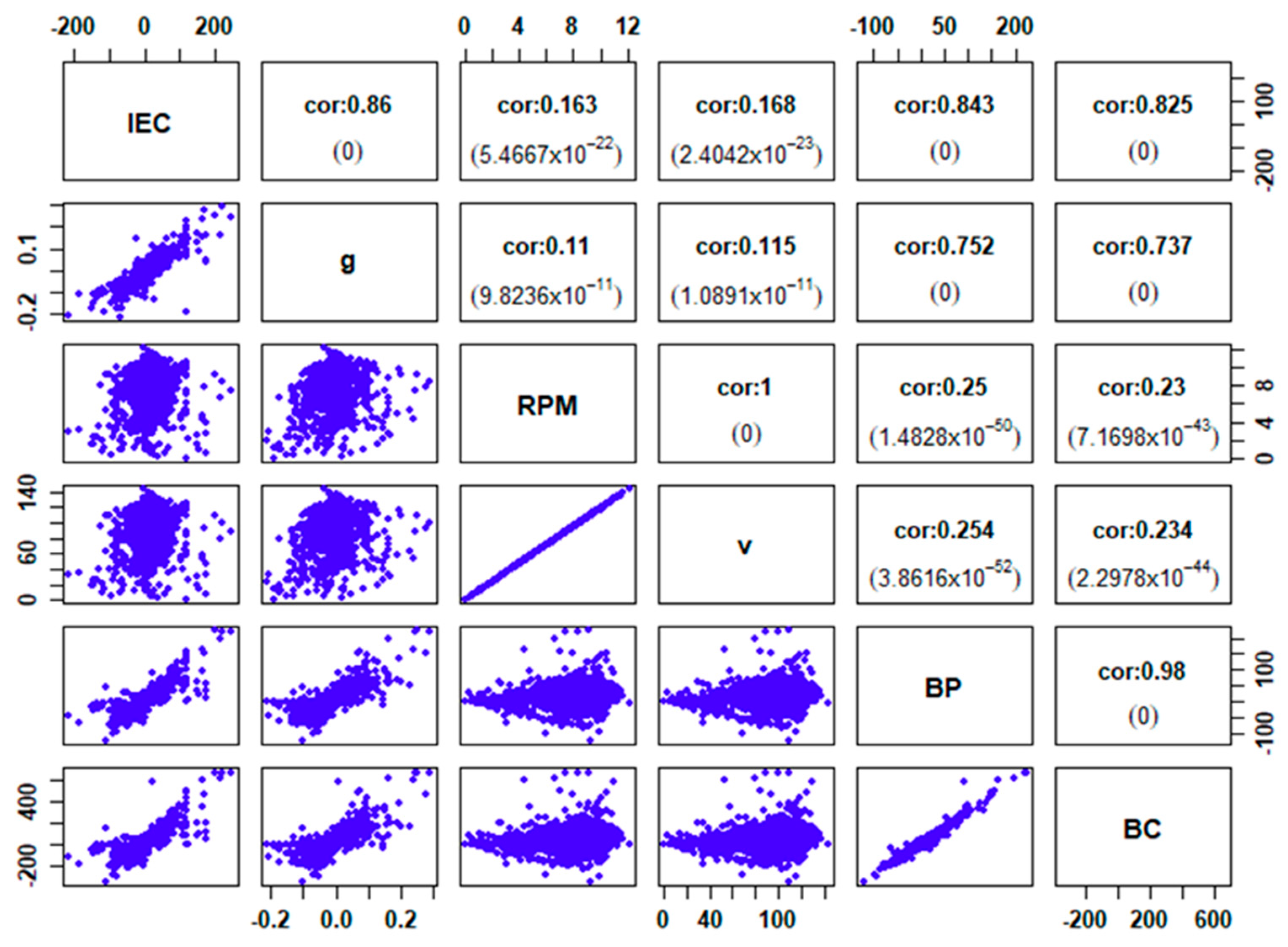
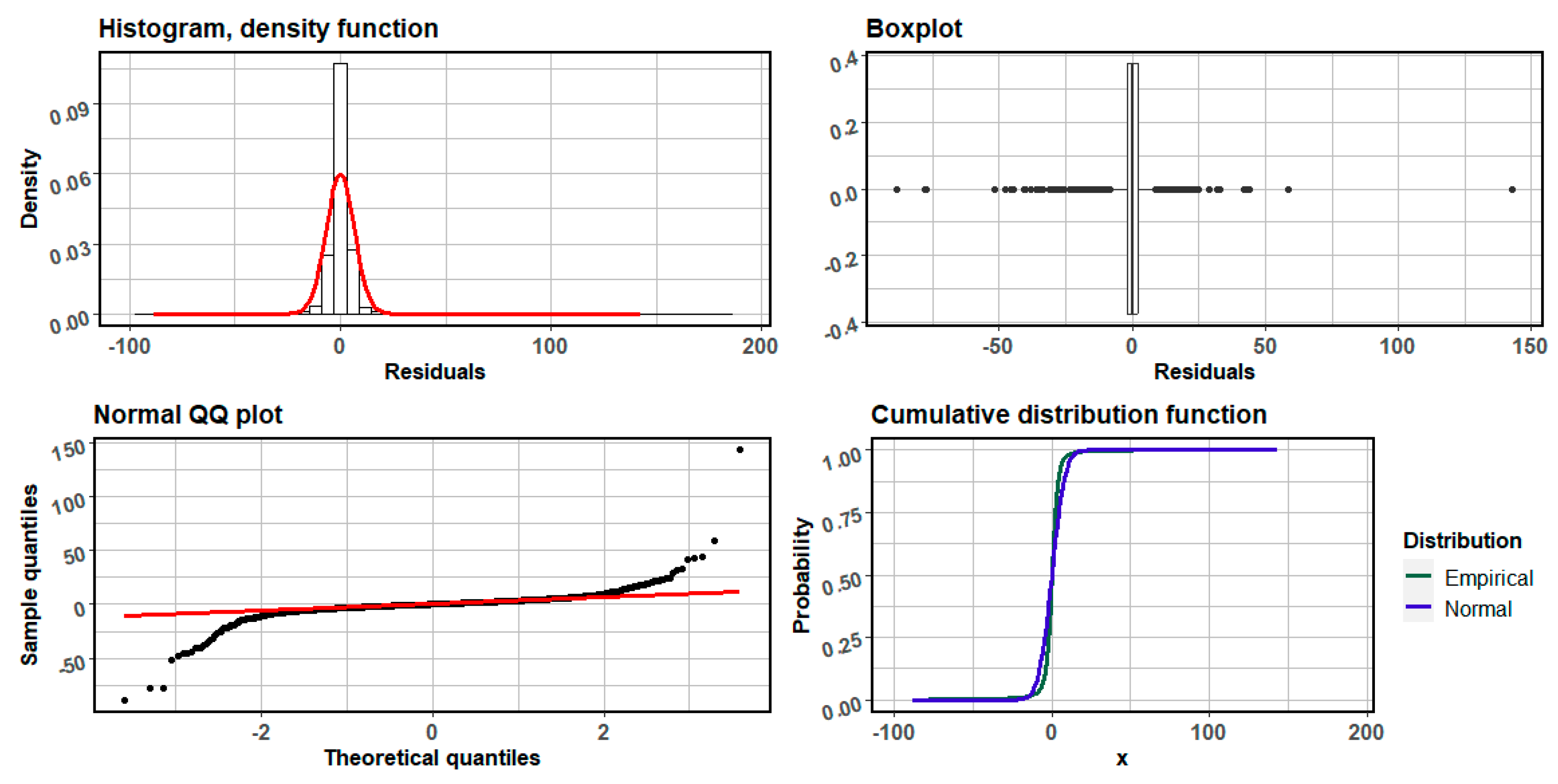
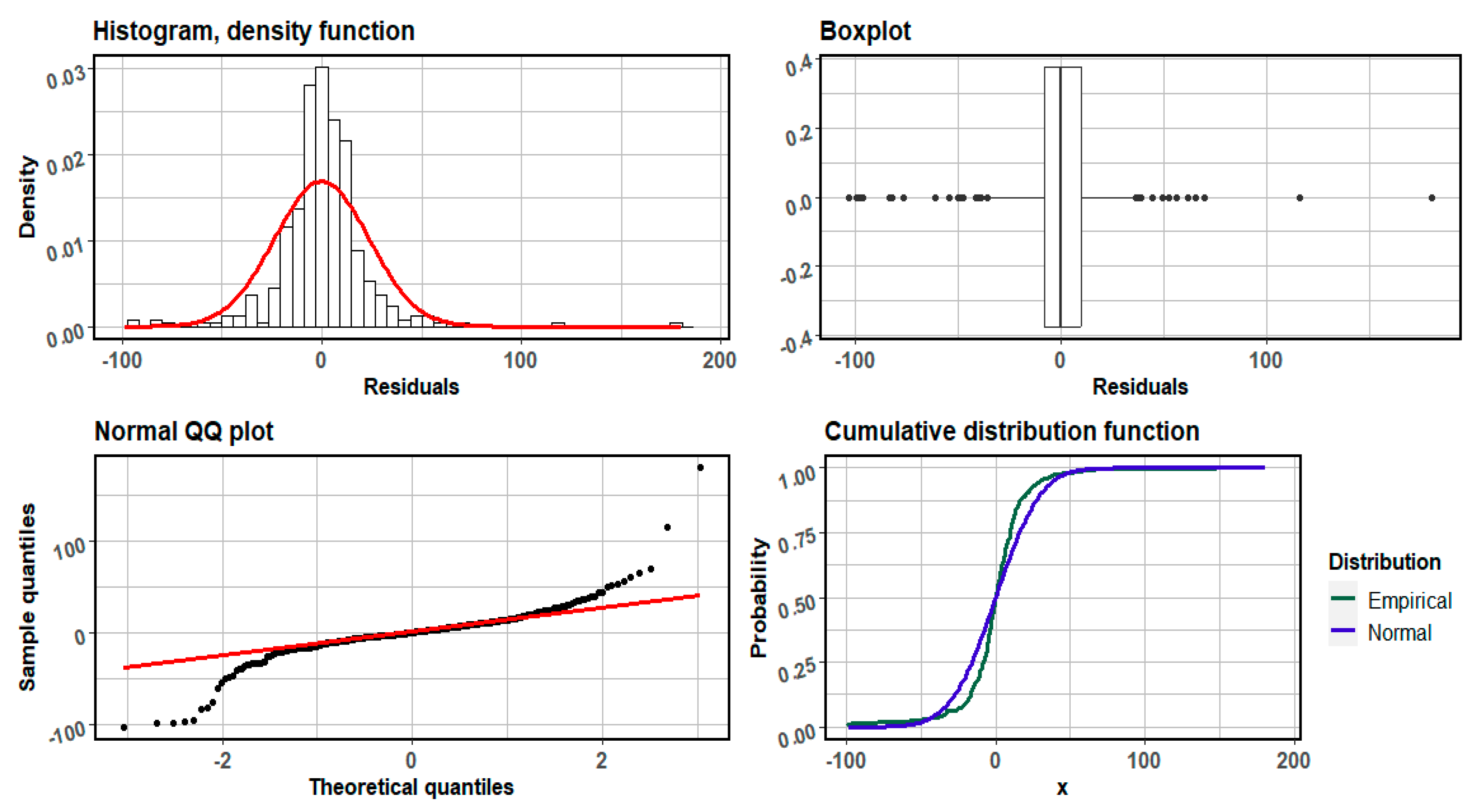
25]. Appropriate mathematical models were proposed for this purpose, and the research results and limitations of the method used were presented.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}