
An Overview of the Multilevel Control Scheme Utilized by Microgrids

 ,
, 
 and
and 
Abstract
1. Introduction
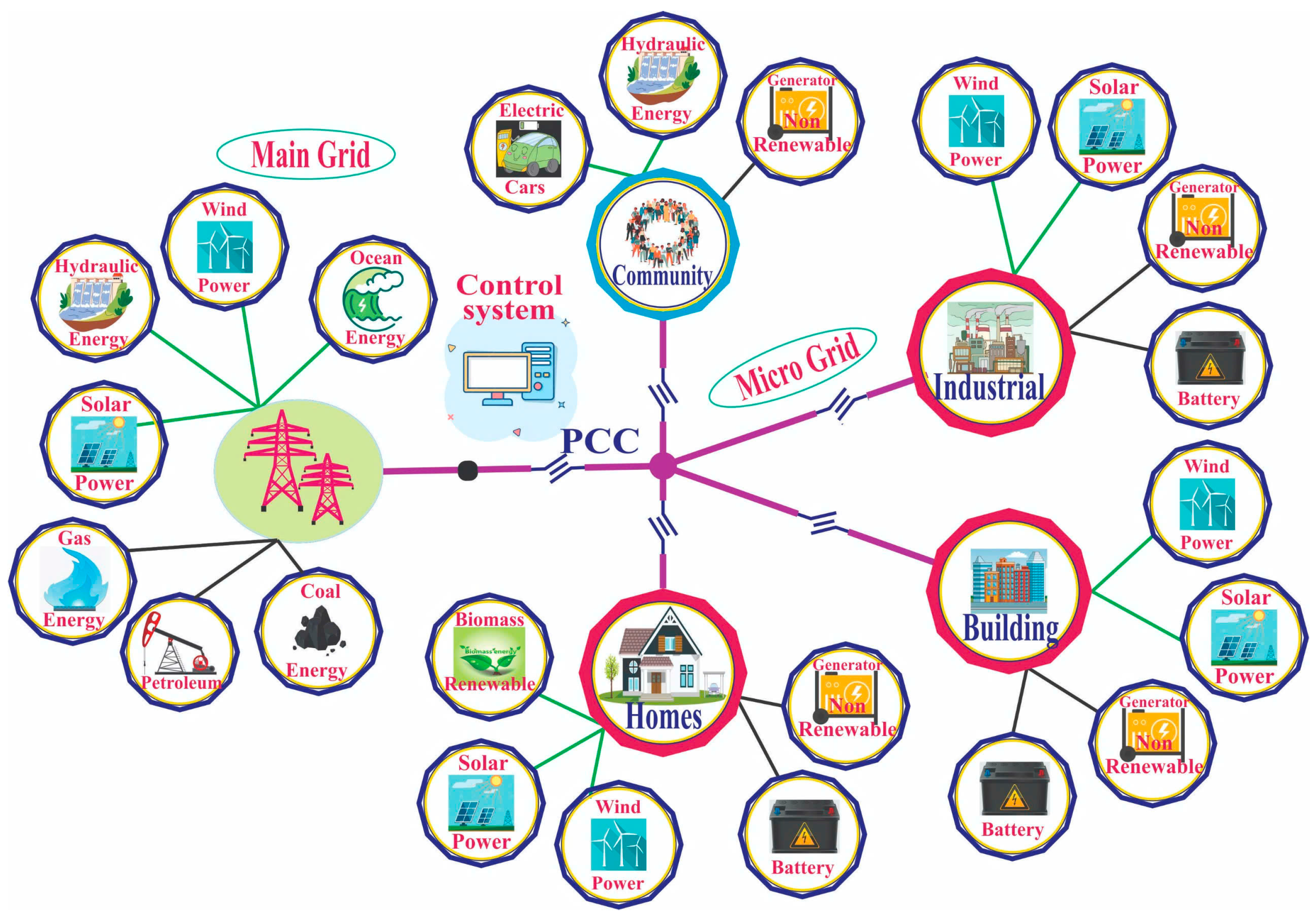
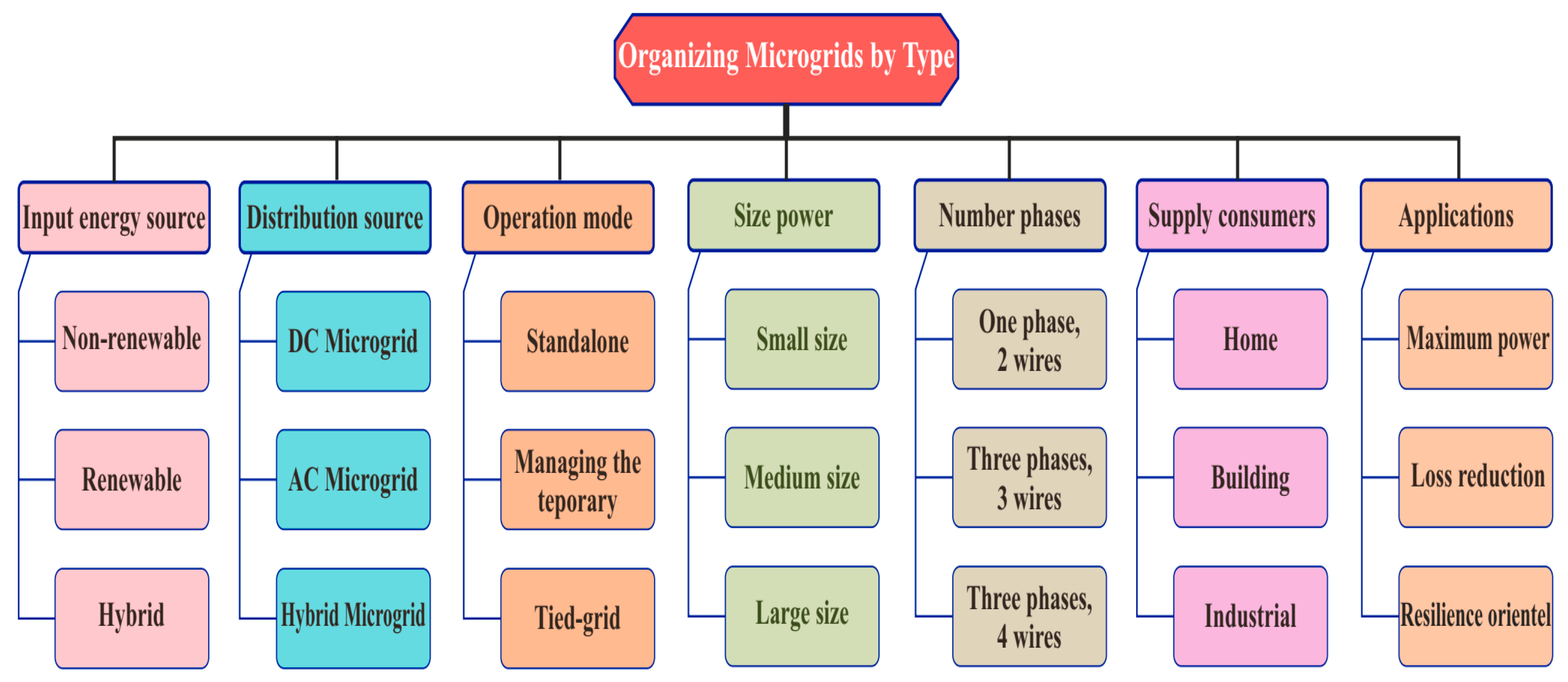
2. MG Structure and Operation [18]
2.1. AC Microgrid [10]
2.1.1. The Advantages of ACMGs
2.1.2. The Drawbacks of ACMGs
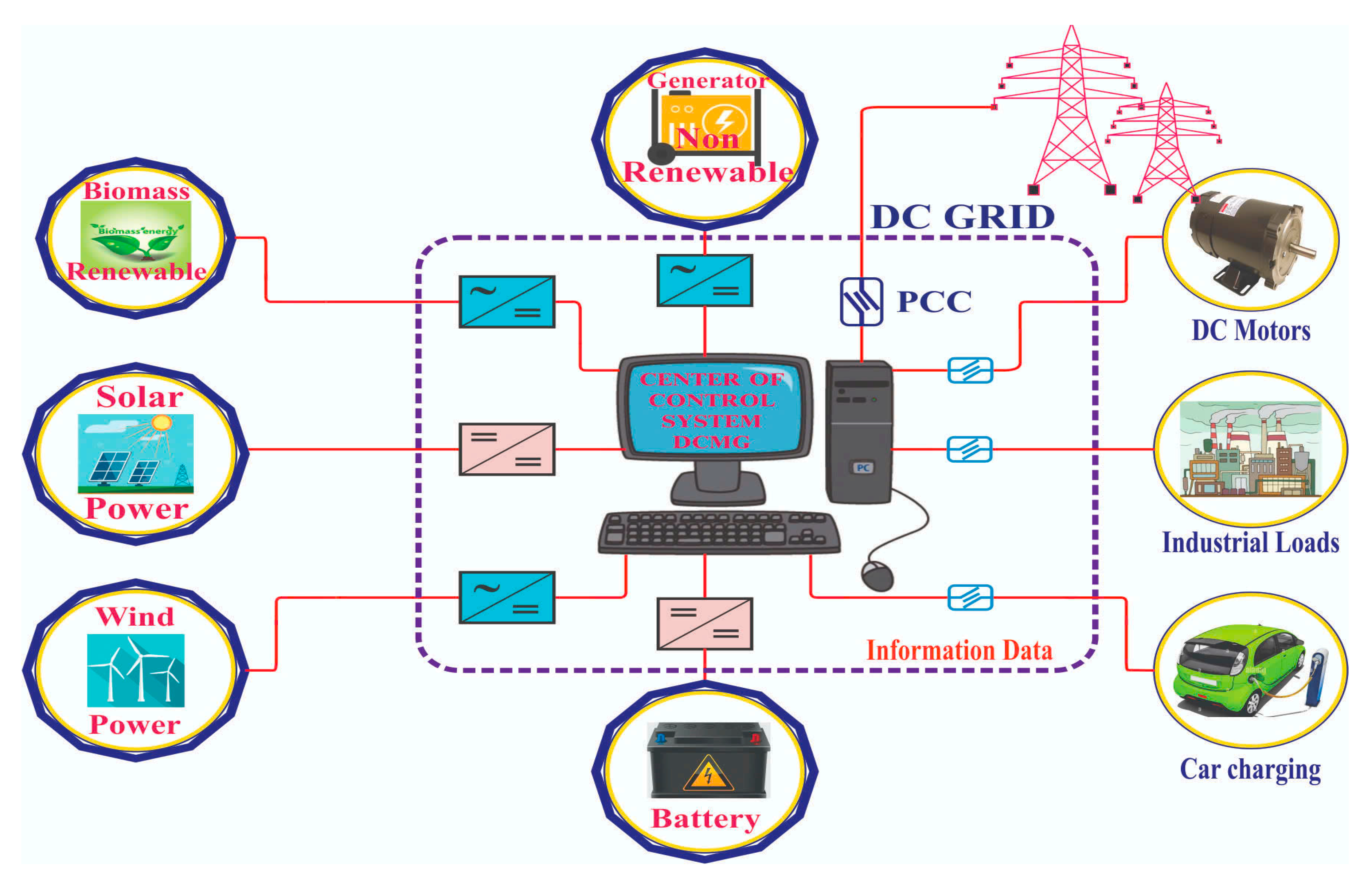
2.2. DCMG [21]
2.2.1. The Advantages of DCMGs
2.2.2. The Drawbacks of DCMGs
2.3. Hybrid MGs
The Benefits of Hybrid MGs [23]
2.4. The Operating Modes of MGs
2.4.1. Islanded Mode
2.4.2. Tied Grid Mode of Operation
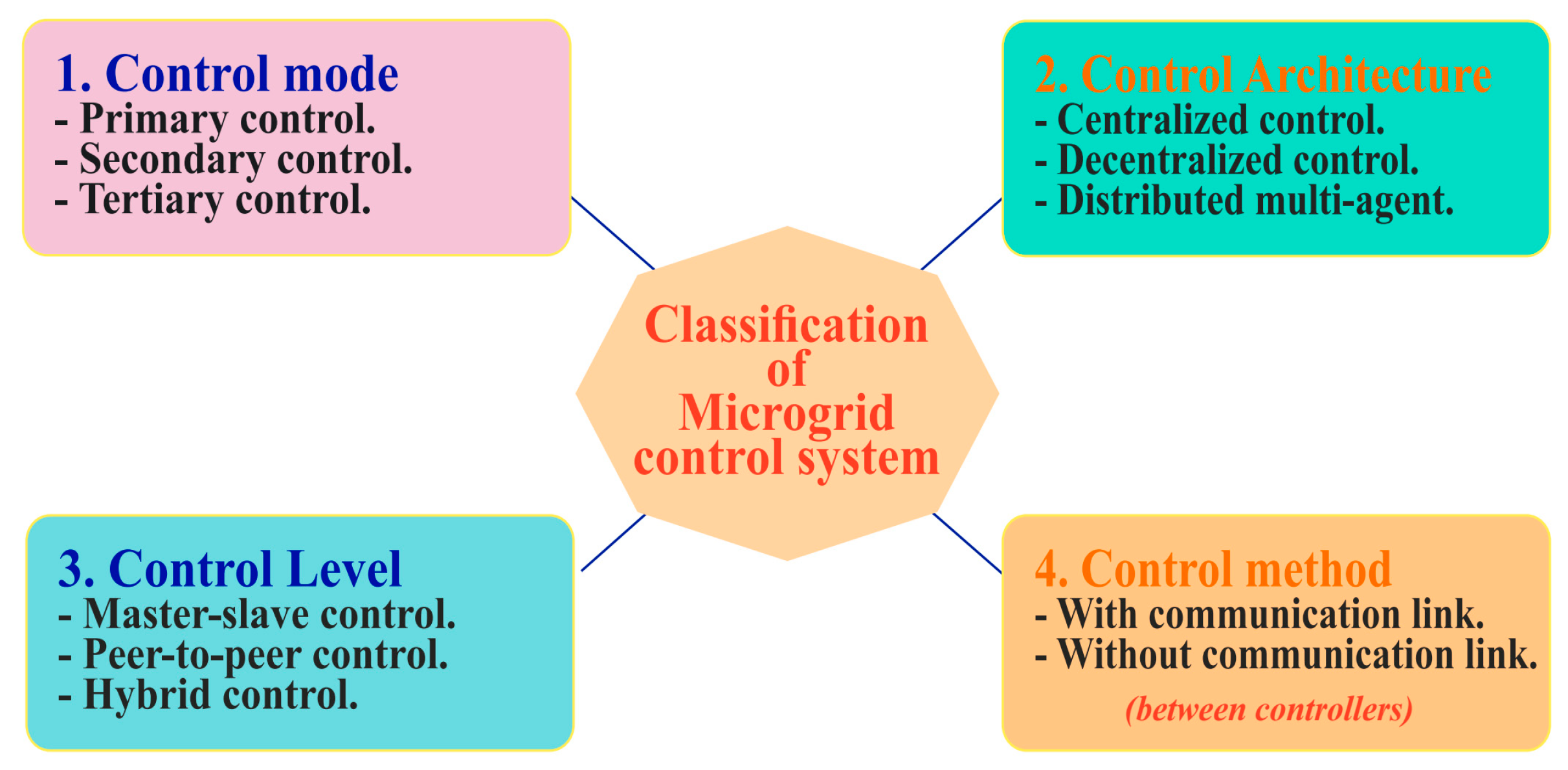
3. Advanced Control Methods of MG
3.1. Control Mode
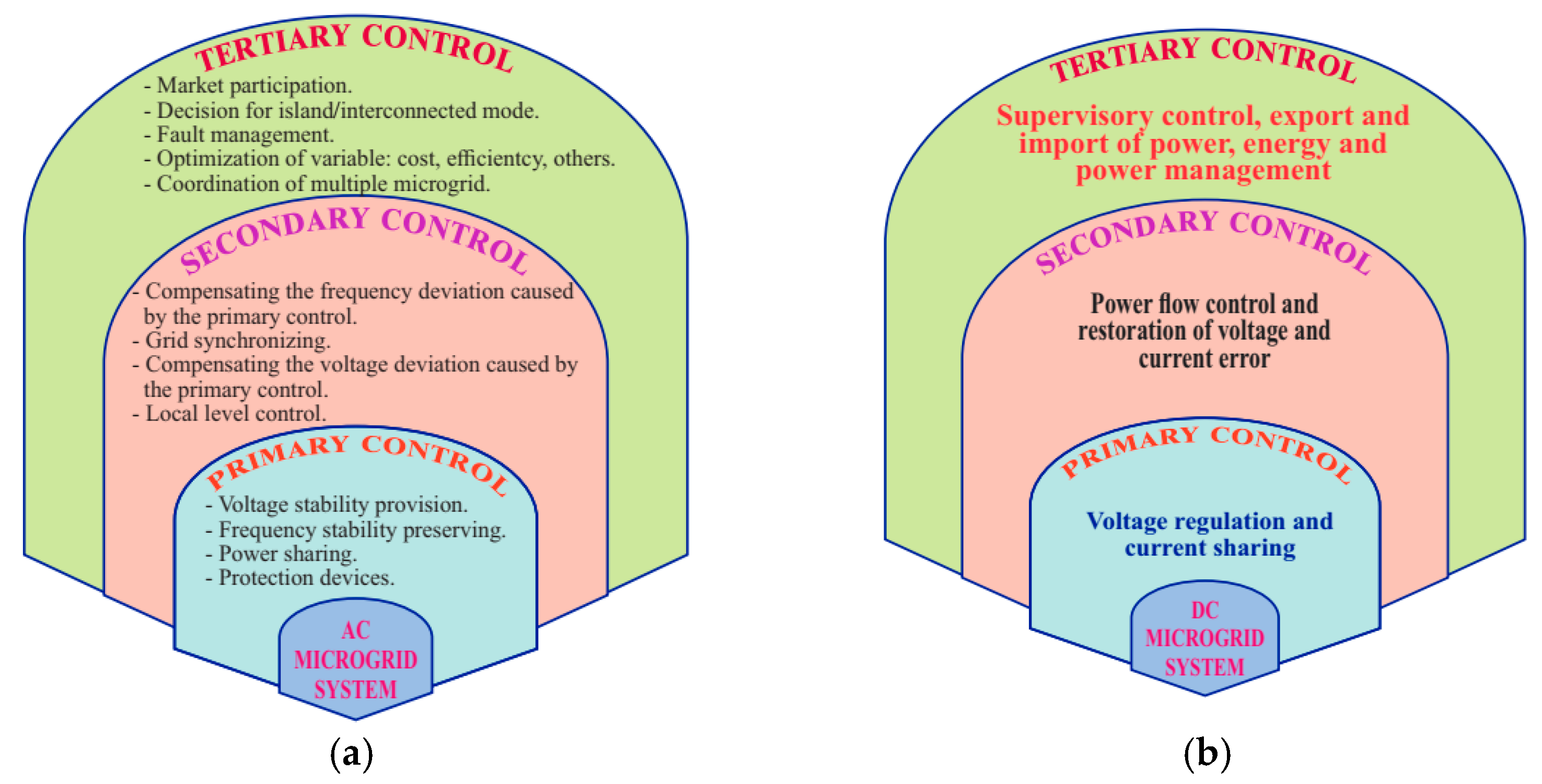
3.1.1. ACMG
- Primary control
- Secondary control
- Tertiary control
3.1.2. DC Microgrid
3.2. Control Architecture
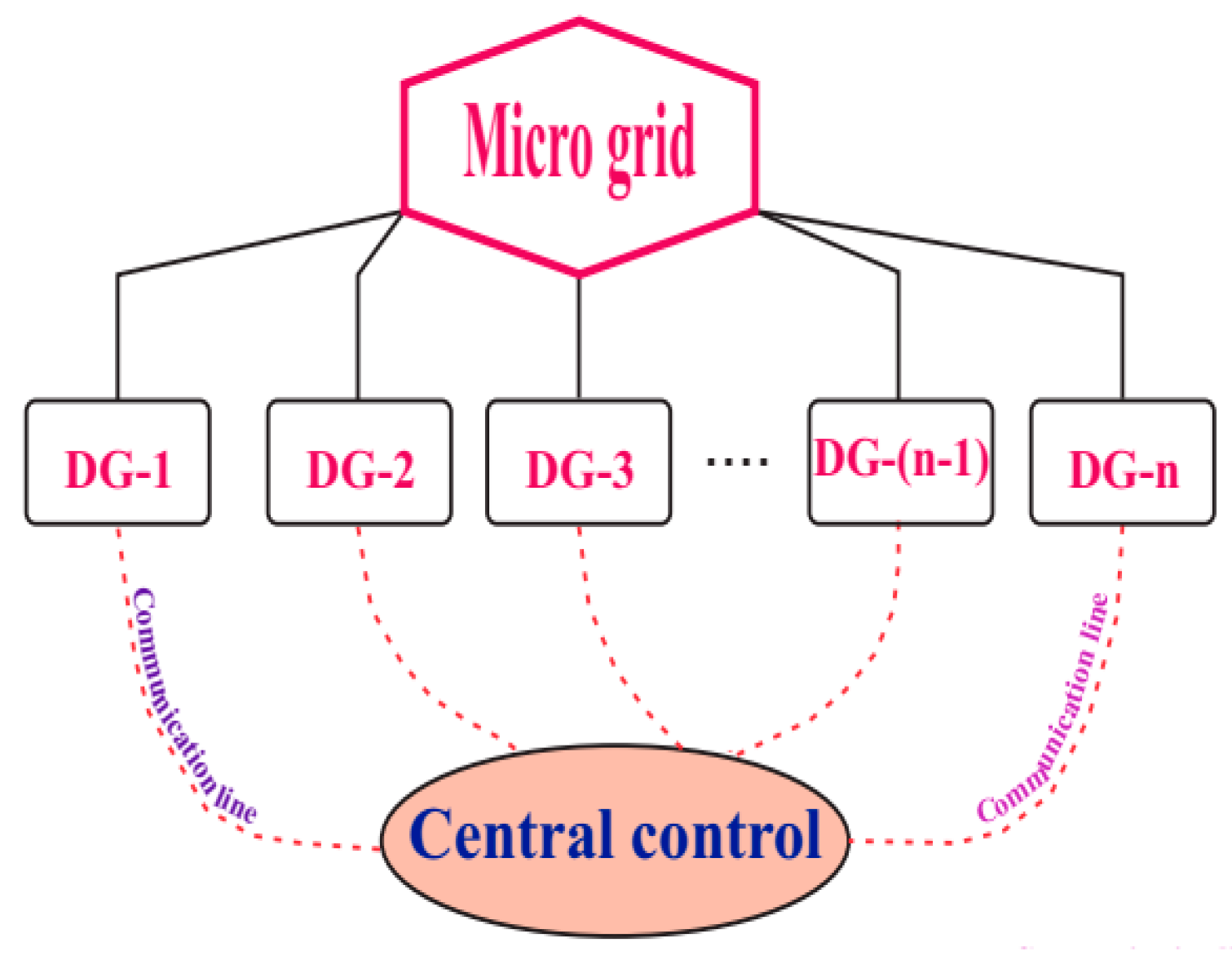
3.2.1. Centralized Control
3.2.2. Decentralized Control
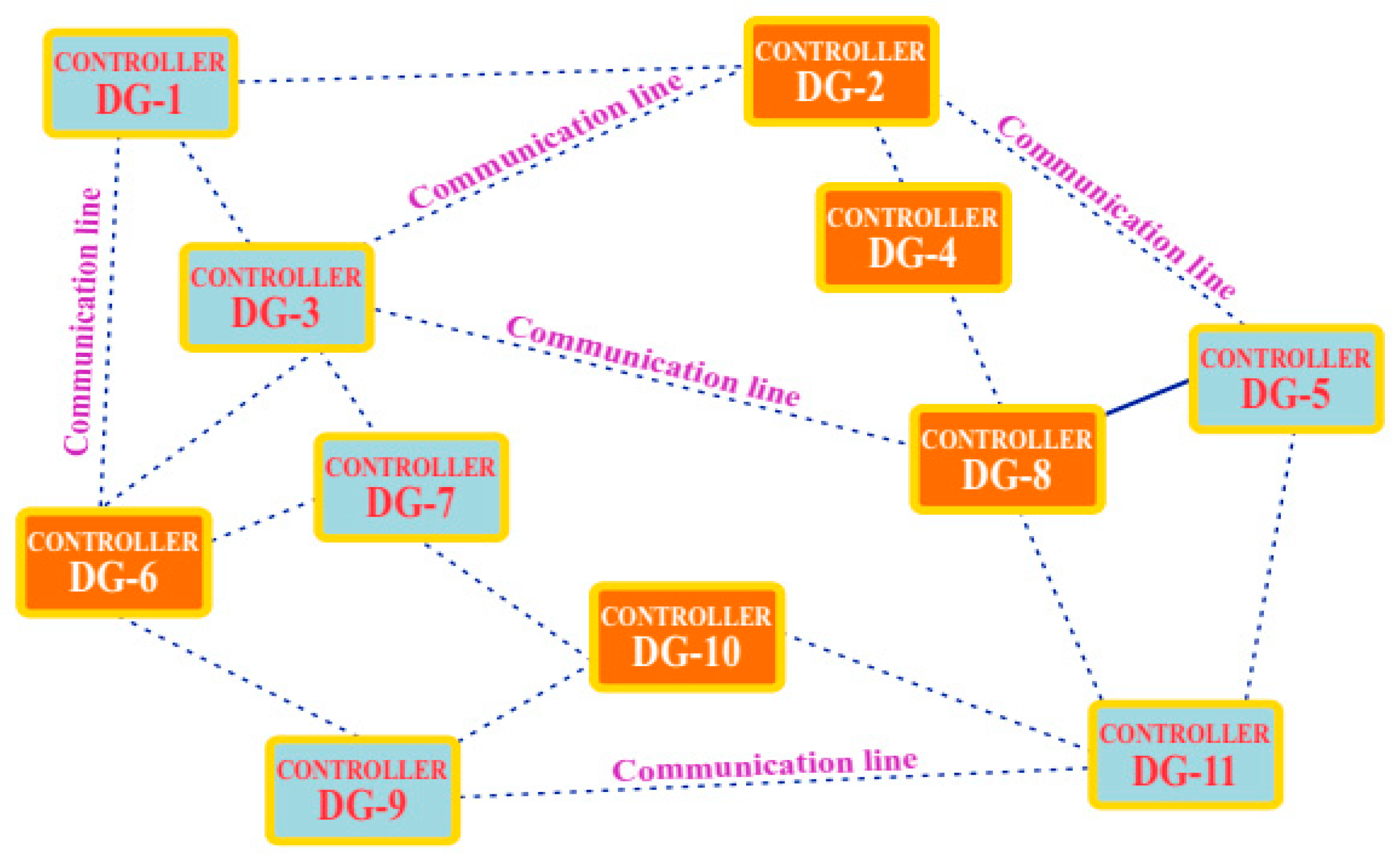
3.2.3. Distributed Multi-Control Agent
3.3. Control Level
3.3.1. Master–Slave Control
3.3.2. Peer-to-Peer Control
3.4. Control Method
3.4.1. Without Communication Link
3.4.2. With Communication Link
3.5. Modern Control Stages for MG
3.5.1. Conventional Control Methods
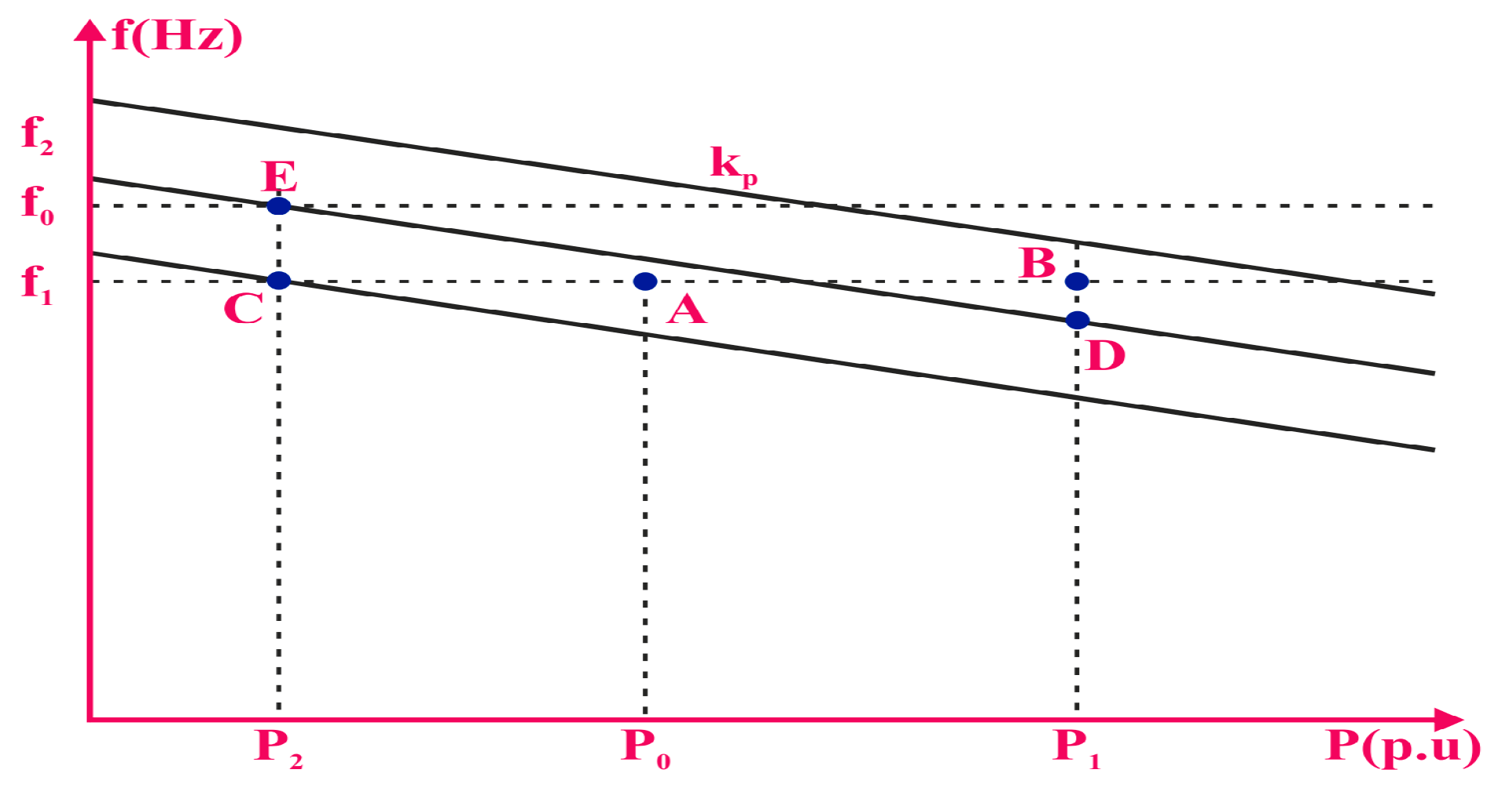
- V-f control
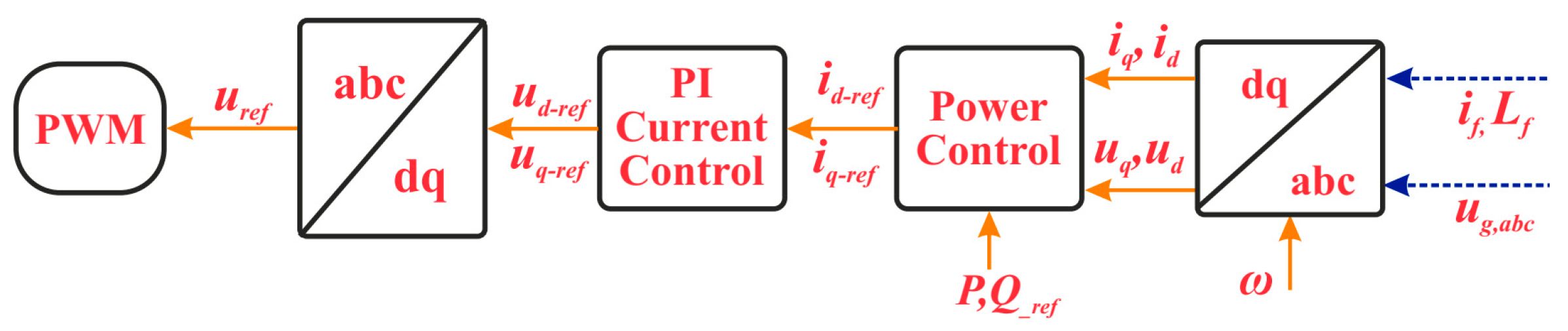
- P-Q control
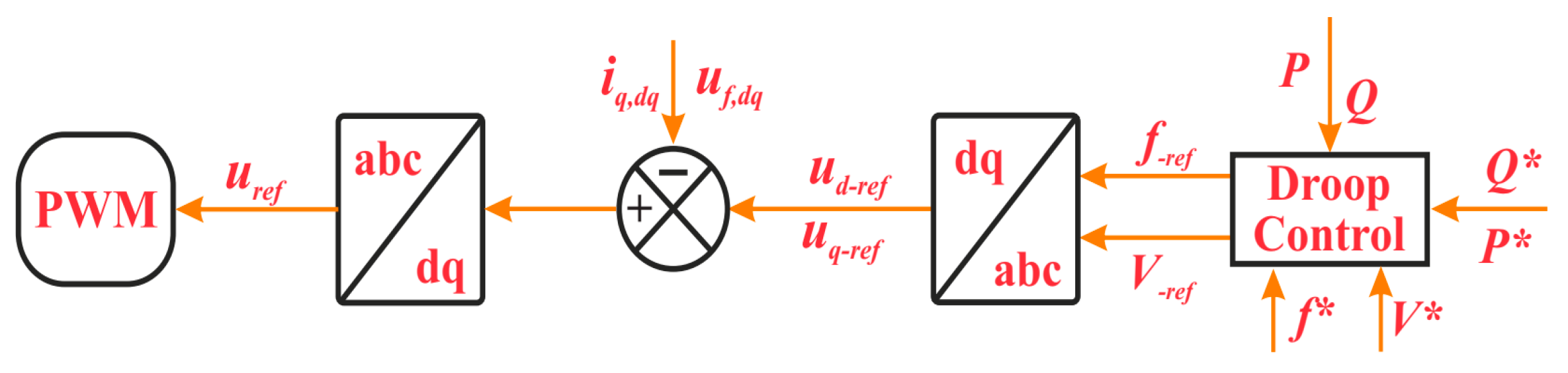
- Droop control
3.5.2. Intelligent and Adaptive Control
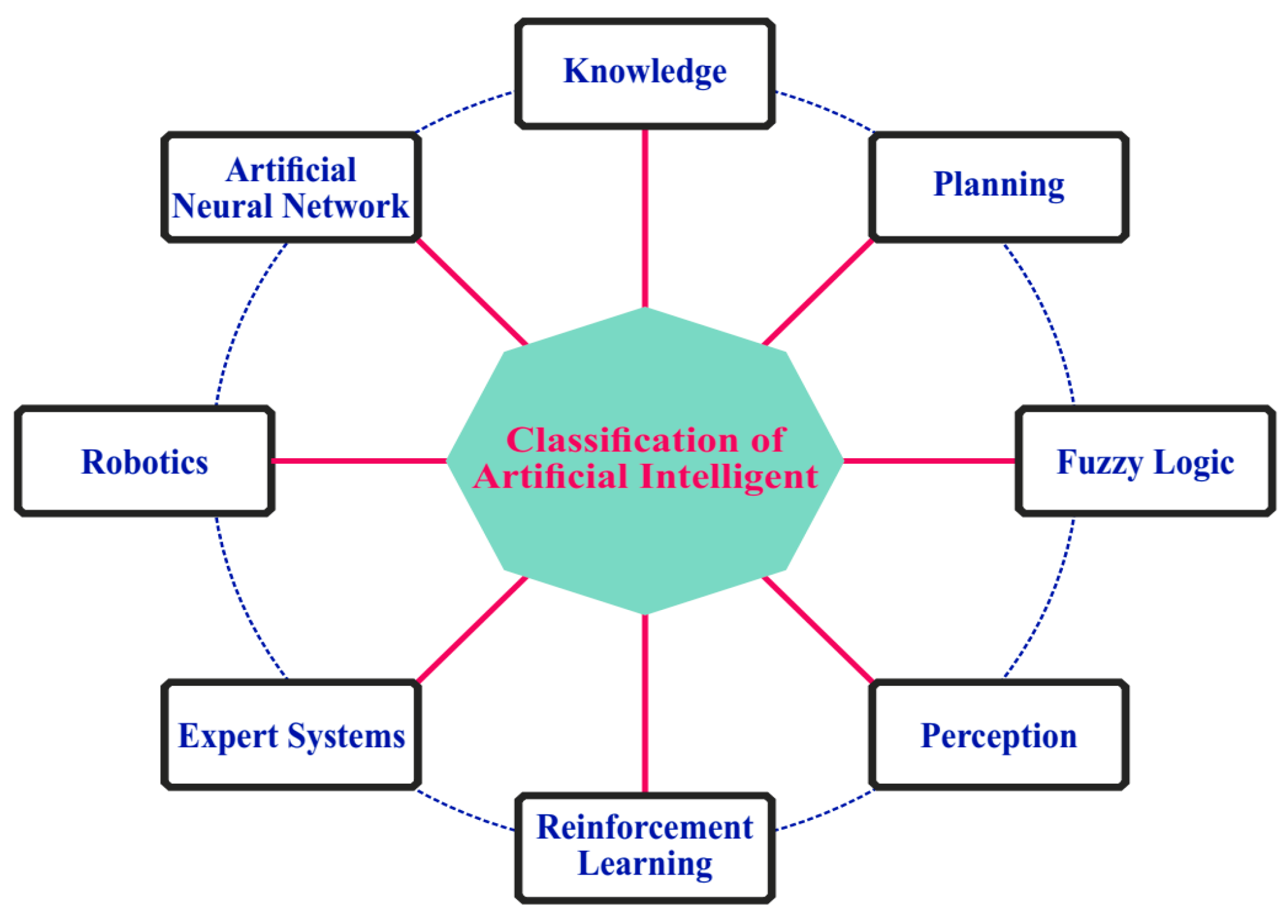
- Artificial Intelligence
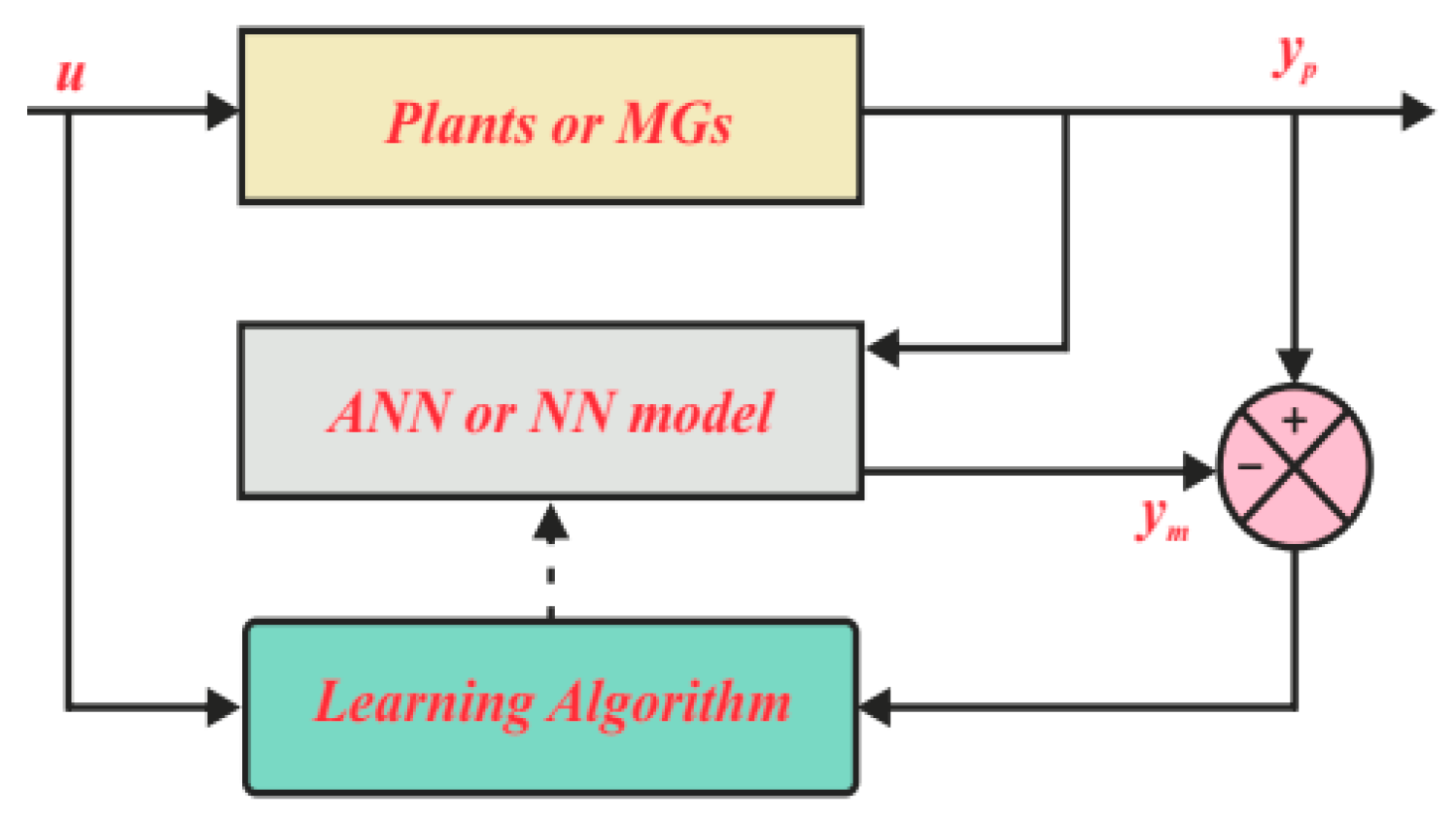
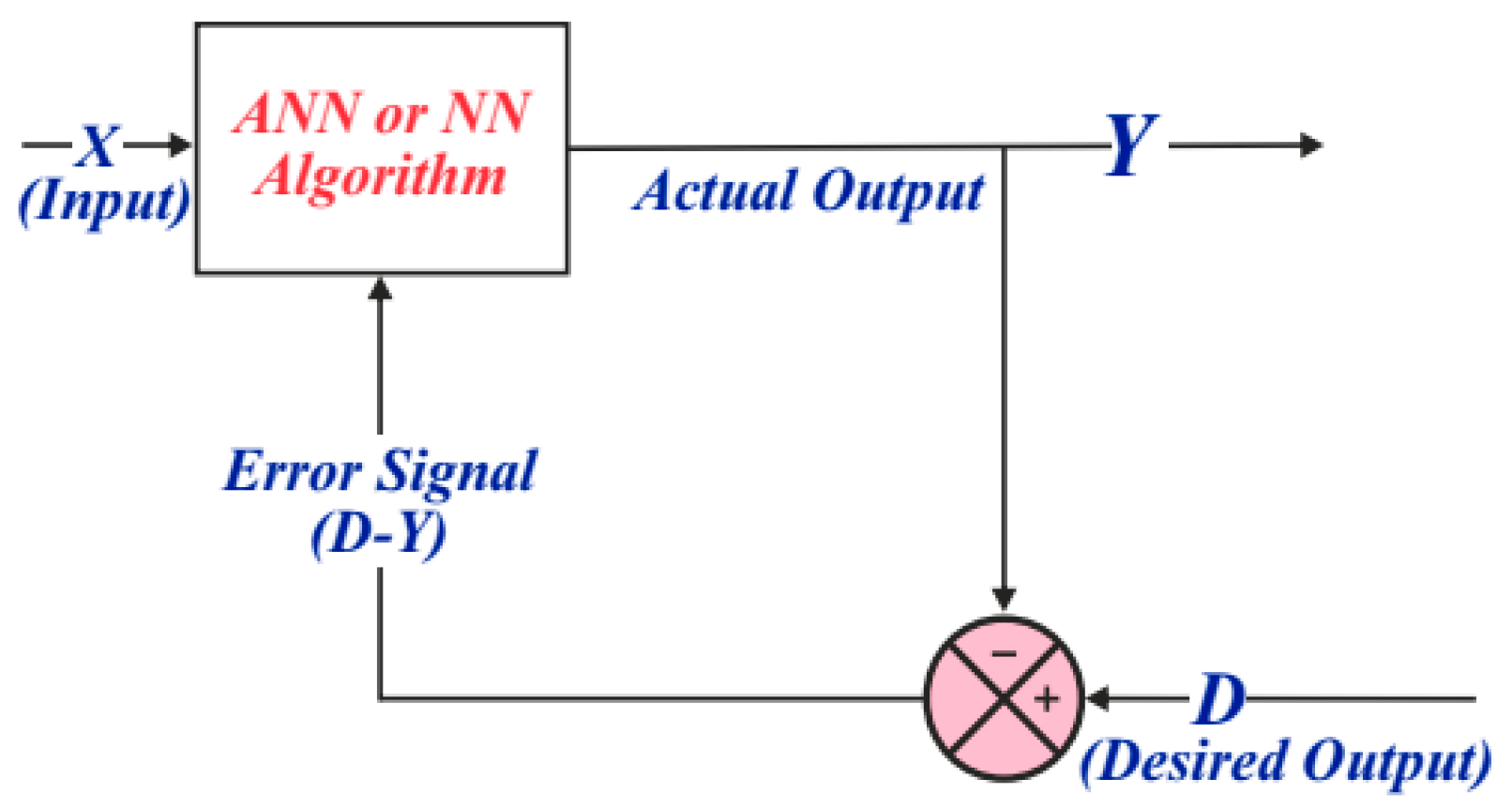
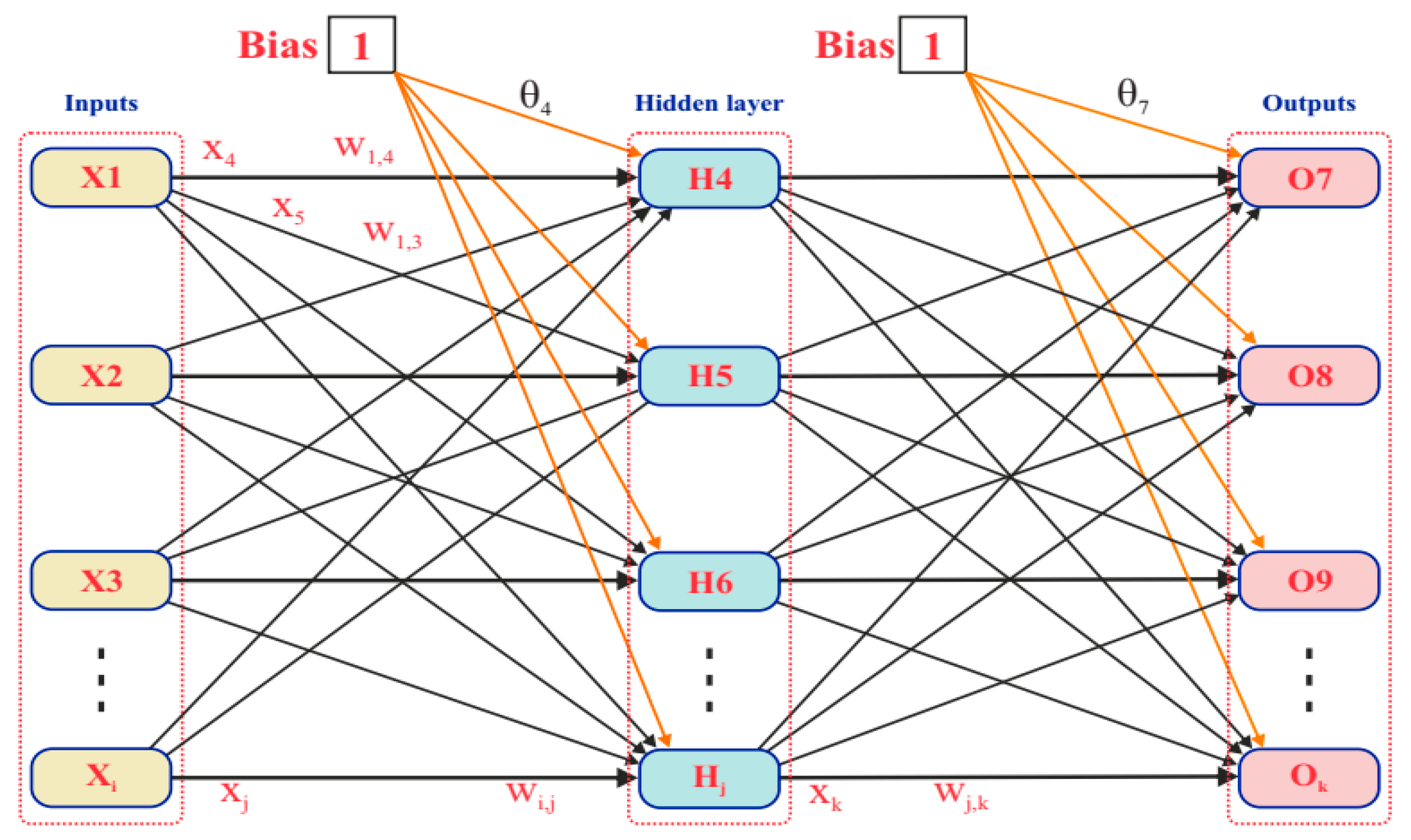
- Artificial Neural Networks (ANNs)
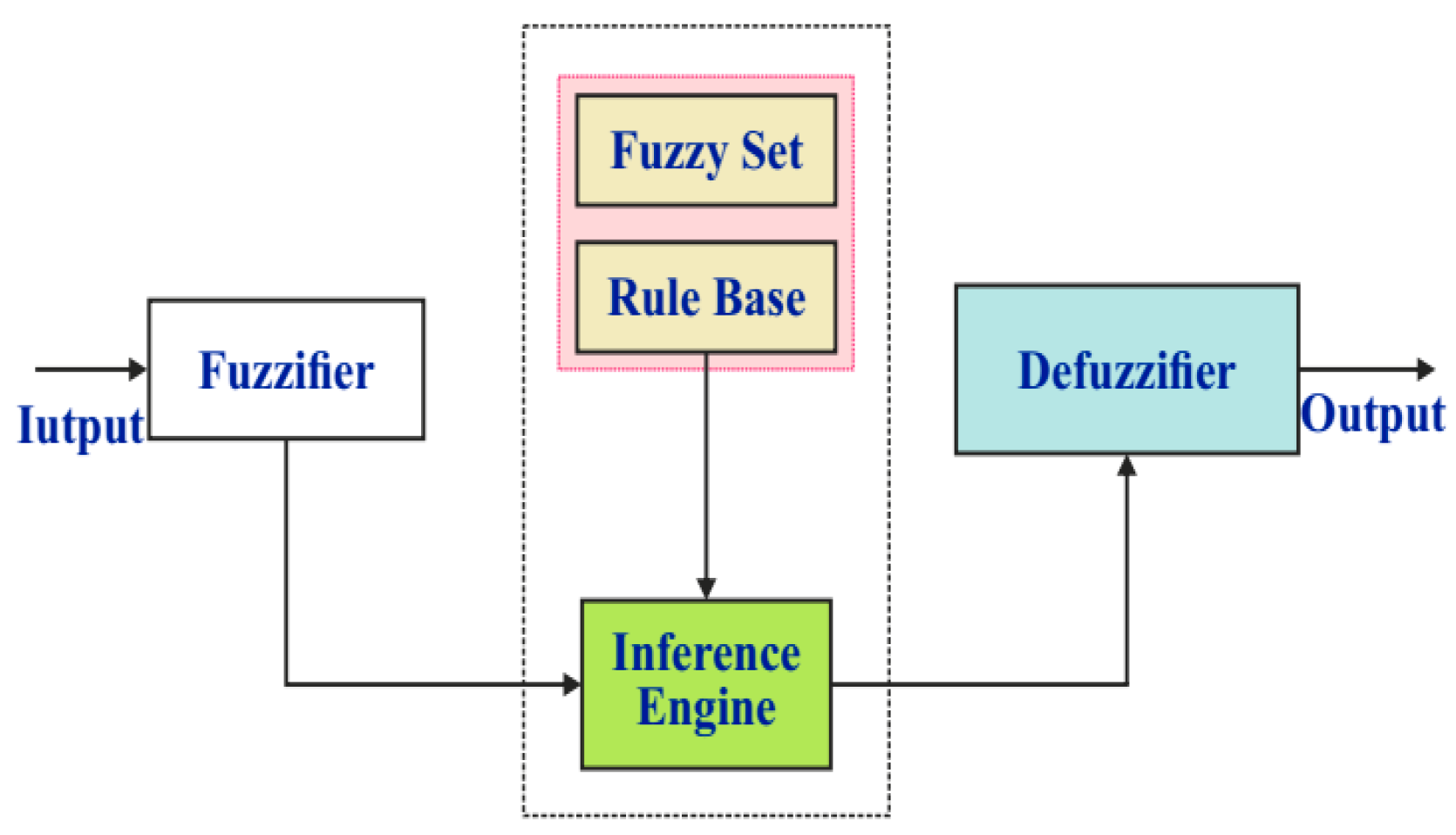
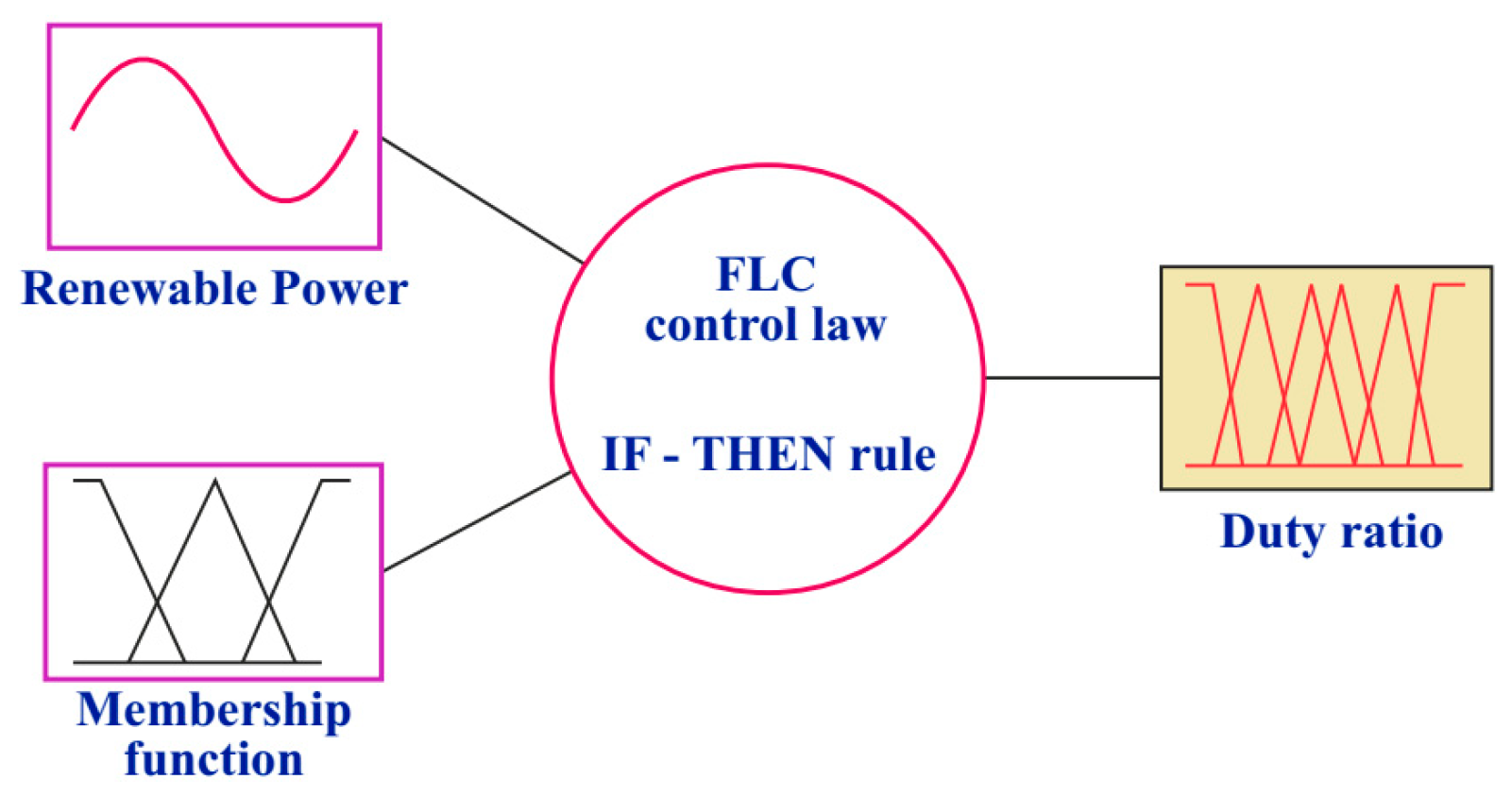
- Fuzzy Logic Control (FLC)
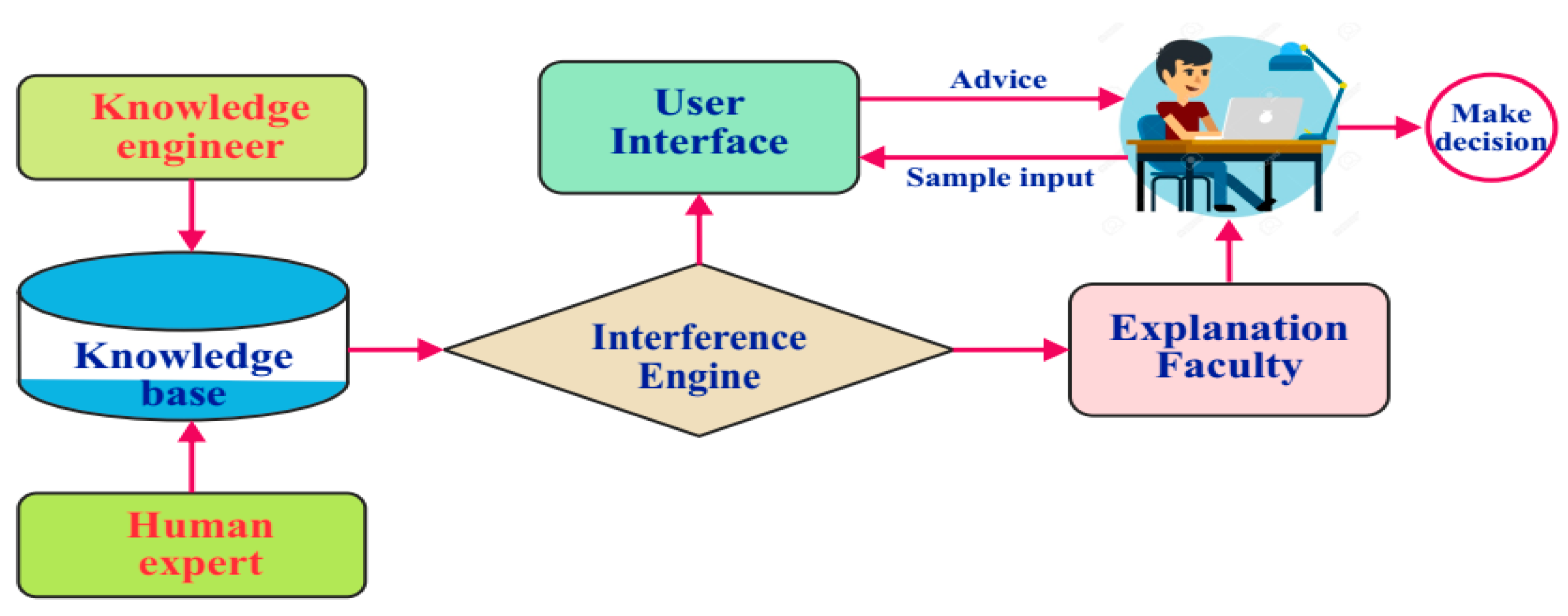
- Expert Systems
- Adaptive control
4. Discussion
5. Trends and Future of MG
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Abbreviations | Signification |
| AC | Alternate current |
| ACMG | Alternate current microgrid |
| AI | Artificial intelligence |
| ANN | Artificial neural network |
| ASMC | Adaptive sliding mode controller |
| BESS | Battery energy storage system |
| DC | Direct current |
| DCMG | Direct current microgrid |
| DER | Distributed energy resources |
| DG | Distributed generator |
| DG | Distributed generator |
| FLC | Fuzzy logic control |
| GA | Genetic algorithm |
| MG | Microgrid |
| MGs | Microgrids |
| MPPT | Maximum power point tracking |
| NN | Neural network |
| P | Active power |
| PCC | Point common coupling |
| PI | Proportional–integral |
| PID | Proportional–integral–derivative |
| PV | Photovoltaic |
| Q | Reactive power |
| SMC | Sliding mode controller |
References
- Wang, Y.; Wang, Z.; Sheng, H. Optimizing wind turbine integration in microgrids through enhanced multi-control of energy storage and micro-resources for enhanced stability. J. Clean. Prod. 2023, 444, 140965. [Google Scholar] [CrossRef]
- Aziz, T.; Salman, S.I.M.; Islam, M.S.; Razzaq, A.; Chowdhury, R.A.; Mitun, M.I.H. Integration of Wind Energy System in Microgrid Considering Static and Dynamic Issues. In Proceedings of the 2nd International Conference on Electrical Engineering and Information & Communication Technology (ICEEICT), Savar, Bangladesh, 21–23 May 2015; pp. 1–5. [Google Scholar]
- Canziani, F.; Vargas, R.; Gastelo-Roque, J.A. Hybrid Photovoltaic-Wind Microgrid with Battery Storage for Rural Electrification: A Case Study in Perú. Orig. Res. 2021, 8, 528571. [Google Scholar] [CrossRef]
- Nasab, N.M.; Kilby, J.; Bakhtiary, L. Case Study of a Hybrid Wind and Tidal Turbines System with a MG for Power Supply to a Remote Off-Grid Community in New Zealand. Energies 2021, 14, 3636. [Google Scholar] [CrossRef]
- Alzahrani, A.; Kumar, R.S.; Devarajan, G.; Indragandhi, V. A Review on Hydrogen-Based Hybrid Microgrid System: Topologies for Hydrogen Energy Storage, Integration, and Energy Management with Solar and Wind Energy. Energies 2022, 15, 7979. [Google Scholar] [CrossRef]
- Kikusato, H.; Ustun, T.S.; Suzuki, M.; Sugahara, S.; Hashimoto, J.; Otani, K.; Ikeda, N.; Komuro, I.; Yokoi, H.; Takahashi, K. Flywheel energy storage system based microgrid controller design and PHIL testing. Energy Rep. 2022, 8, 470–475. [Google Scholar] [CrossRef]
- Bunker, K.J.; Weaver, W. Optimal geometric control of Dc microgrids. In Proceedings of the 2014 IEEE 15th Workshop on Control and Modeling for Power Electronics, Santander, Spain, 22–25 June 2014; pp. 1–7. [Google Scholar]
- Kumar, J.; Agarwal, A.; Agarwal, V. A review on overall control of DC microgrids. J. Energy Storage 2019, 21, 113–138. [Google Scholar] [CrossRef]
- Abhishek, A.; Ranjan, A.; Devassy, S.; Verma, B.K.; Kumar, S.; Ram; Dhakar, A.K. Review of hierarchical control strategies for DC microgrid. IET Renew. Power Gener. 2020, 14, 1631–1640. [Google Scholar] [CrossRef]
- Kaviri, S.M.; Pahlevani, M.; Jain, P.; Bakhshai, A. A Review of AC Microgrid Control Methods. In Proceedings of the 2017 IEEE 8th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Florianopolis, Brazil, 17–20 April 2017; pp. 1–8. [Google Scholar]
- Mahmoud, M.S.; Alyazidi, N.M.; Abouheaf, M.I. Adaptive intelligent techniques for microgrid control systems: A survey. Int. J. Electr. Power Energy Syst. 2017, 90, 292–305. [Google Scholar] [CrossRef]
- Zhou, X.; Guo, T.; Ma, Y. An Overview on Microgrid Technology. In Proceedings of the International Conference on Mechatronics and Automation, Beijing, China, 2–5 August 2015; pp. 1–6. [Google Scholar]
- Bashir, S.B.; Ismail, A.A.A.; Elnady, A.; Farag, M.M.; Hamid, A.-K.; Bansal, R.C.; Abo-Khalil, A.G. Modular Multilevel Converter-Based Microgrid: A Critical Review. IEEE Access 2023, 11, 65569–65589. [Google Scholar] [CrossRef]
- Erenoğlu, A.K.; Sancar, S.; Erdinç, O.; Bağriyanik, M. A topological overview of microgrids: From maturity to the future. Turk. J. Electr. Eng. Comput. Sci. 2021, 29, 1308–1353. [Google Scholar] [CrossRef]
- Ahmed, I.; Rehan, M.; Basit, A.; Ahmad, H.; Ahmed, W.; Ullah, N.; Piecha, M.; Blazek, V.; Prokop, L. Review on microgrids design and monitoring approaches for sustainable green energy networks. Sci. Rep. 2023, 13, 21663. [Google Scholar] [CrossRef] [PubMed]
- Pires, V.F.; APires, A. and Cordeiro A. DC Microgrids: Benefits, Architectures, Perspectives and Challenges. Energies 2023, 16, 1727. [Google Scholar] [CrossRef]
- Villalón, A.; Rivera, M.; Salgueiro, Y.; Muñoz, J.; Dragi, T.; Blaabjerg, F. Predictive Control for Microgrid Applications A Review Study. Energies 2020, 13, 2454. [Google Scholar] [CrossRef]
- Nishikawa, K.; Shimoda, E.; Shimoda, E.; Nitta, T.; Nitta, T.; Masada, E. Design Methods and Integrated Control Design Methods and Integrated Control; IEEE: Piscataway, NJ, USA, 2008; pp. 1–7. [Google Scholar]
- Ghazanfar, S. A brief review on microgrids: Operation, applications, modeling, and control. Int. Trans. Electr. Energy Syst. 2021, 31, e12885. [Google Scholar]
- Rajesh, K.S.; Dash, S.S.; Rajagopal, R.; Sridhar, R. A review on control of ac microgrid. Renew. Sustain. Energy Rev. 2017, 71, 814–819. [Google Scholar] [CrossRef]
- Zhou, Y.; Ngai, C.; Ho, M. A Review on Microgrid Architectures and Control Methods. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 1–8. [Google Scholar]
- Pabbuleti, B.; Somlal, J. A review on hybrid ac/dc microgrids: Optimal sizing, stability control and energy management approaches. J. Crit. Rev. 2020, 7, 376–381. [Google Scholar]
- Barik, A.K.; Jaiswal, S.; Das, D.C. Recent trends and development in hybrid microgrid: A review on energy resource planning and control. Int. J. Sustain. Energy 2022, 41, 308–322. [Google Scholar] [CrossRef]
- Azeem, O.; Ali, M.; Abbas, G.; Uzair, M.; Qahmash, A.; Algarni, A.; Hussain, M.R. A Comprehensive Review on Integration Challenges, Optimization Techniques and Control Strategies of Hybrid AC/DC Microgrid. Appl. Sci. 2021, 11, 6242. [Google Scholar] [CrossRef]
- Dawoud, S.M.; Lin, X.; Okba, M.I. Hybrid renewable microgrid optimization techniques: A review. Renew. Sustain. Energy Rev. 2018, 82, 2039–2052. [Google Scholar] [CrossRef]
- Chau, L.X.; Thanh, T.V.; Quan, D.M.; Hung, L.K.; Hieu, T.T. Using Statcom Devices To Control And Maintain Voltage Stability In Wind Turbine Generators. In Proceedings of the 2023 Asia Meeting on Environment and Electrical Engineering (EEE-AM), Hanoi, Vietnam, 13–15 November 2023; pp. 1–5. [Google Scholar]
- Phan, T.M.; Nguyen, T.T.; Duong, M.Q.; Nguyen, T.T. Optimal design and operation of battery energy storage systems in renewable power plants to reach maximum total electric sale revenues. Neural Comput. Appl. 2024, 36, 1–22. [Google Scholar] [CrossRef]
- Sen, S.; Kumar, V. Microgrid control: A comprehensive survey. Annu. Rev. Control. 2018, 45, 118–151. [Google Scholar] [CrossRef]
- Gheorghiu, C.; Scripcariu, M.; Tanasiev, G.N.; Gheorghe, S.; Duong, M.Q. A Novel Methodology for Developing an Advanced Energy-Management System. Energies 2024, 17, 1605. [Google Scholar] [CrossRef]
- Le, C.; Chien, D.N.; Tuong, N.T.C.; Hieu, T.T.; Duong, M.Q. Improving Efficient Smart Management of Power Transmission Network Using BIM Technology. Meas. Control Autom. 2024, 5, 54–59. [Google Scholar]
- Chen, X.; Wang, Y.H.; Wang, Y.C. A novel seamless transferring control method for microgrid based on master-slave configuration. In Proceedings of the 2013 IEEE ECCE Asia Downunder, Melbourne, VIC, Australia, 3–6 June 2013; pp. 351–357. [Google Scholar]
- El-Shahat, A.; Sumaiya, S. DC-Microgrid System Design, Control, and Analysis. Electronics 2019, 8, 124. [Google Scholar] [CrossRef]
- Bharath, K.R.; Mithun, M.K.; Kanakasabapathy, P. A Review on DC Microgrid Control Techniques, Applications and Trends. Int. J. Renew. Energy Res. 2019, 9, 1328–1338. [Google Scholar]
- Lonkar, M.; Ponnaluri, S. An Overview of DC Microgrid Operation and Control. In Proceedings of the 6th International Renewable Energy Congress (IREC), Sousse, Tunisia, 24–26 March 2015; pp. 1–6. [Google Scholar]
- Wu, Y.; Wu, Y.; Guerrero, J.M.; Vasquez, J.C.; Li, J. AC Microgrid Small-Signal Modeling. IEEE Electrif. Mag. 2019, 7, 80–88. [Google Scholar] [CrossRef]
- Khayat, Y.; Shafiee, Q.; Heydari, R.; Naderi, M.; Dragicevic, T. On the Secondary Control Architectures of AC Microgrids: An Overview. IEEE Trans. Power Electron. 2020, 35, 6482–6500. [Google Scholar] [CrossRef]
- Hou, X.; Sun, Y.; Lu, J.; Zhang, X.; Koh, L.H.; Su, M.; Guerrero, J.M. Distributed Hierarchical Control of AC Microgrid Operating in Grid-Connected, Islanded and Their Transition Modes. IEEE Access 2018, 6, 77388–77401. [Google Scholar] [CrossRef]
- Navarro-Rodríguez, Á.; García, P.; García, J. Adaptive Active Power Sharing Techniques for DC and AC Voltage Control in a Hybrid DC/AC Microgrid. IEEE Trans. Ind. Appl. 2019, 55, 1106–1116. [Google Scholar] [CrossRef]
- Nejabatkhah, F.; Li, Y.W.; Tian, H. Power Quality Control of Smart Hybrid AC/DC Microgrids: An Overview. IEEE Access 2019, 2, 52295–52318. [Google Scholar] [CrossRef]
- Ansari, S.; Chandel, A.; Tariq, M. A Comprehensive Review on Power Converters Control and Control Strategies of AC/DC Microgrid. IEEE Access 2020, 9, 17998–18015. [Google Scholar] [CrossRef]
- Van Tan, N.; Lam, L.H.; Quan, D.M.; Hieu, N.H.; Hung, L.K. A Thorough Overview of Hierarchical Structure of Microgrid Systems. In Proceedings of the International Conference on Green Technology and Sustainable Development, Ho Chi Minh City, Vietnam, 23–24 November 2018; pp. 1–6. [Google Scholar]
- Olivares Daniel, E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Bellmunt, O.G.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Vandoorn Tine, L.; Vasquez, J.C.; De Kooning, J.; Guerrero, J.M.; Vandevelde, L. Microgrids: Hierarchical control and an overview of the control and reserve management strategies. IEEE Ind. Electron. Mag. 2013, 7, 42–55. [Google Scholar] [CrossRef]
- Venkataramanan, G.; Illindala, M. Small signal dynamics of inverter interfaced distributed generation in a chain-microgrid. In Proceedings of the IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Tabatabaei, N.M.; Kabalci, E.; Bizon, N. Microgrid Architectures, Control and Protection Methods; Springer: Baku, Azerbaijan, 2019. [Google Scholar]
- Alfergani, A.; Alfaitori, K.A.; Khalil, A.; Buaossa, N. Control Strategies in AC Microgrid: A Brief Review. In Proceedings of the 9th International Renewable Energy Congress (IREC 2018), Hammamet, Tunisia, 20–22 March 2018. [Google Scholar]
- Valedsaravi, S.; El Aroudi, A.; Barrado-Rodrigo, J.A.; Issa, W.; Martínez-Salamero, L. Control Design and Parameter Tuning for Islanded Microgrids by Combining Different Optimization Algorithms. Energies 2022, 15, 3756. [Google Scholar] [CrossRef]
- Meng, L.; Shafiee, Q.; Trecate, G.F.; Karimi, H.; Fulwani, D.; Lu, X.; Guerrero, J.M. Review on Control of DC Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 928–948. [Google Scholar] [CrossRef]
- Cintuglu, M.H.; Youssef, T.; Mohammed, O.A. Development and Application of a Real-Time Testbed for Multiagent System Interoperability: A Case Study on Hierarchical Microgrid Control. IEEE Power Energy Soc. Gen. Meet. 2017, 9, 1759–1768. [Google Scholar]
- Ahmethodzica, L.; Music, M. Comprehensive review of trends in microgrid control. Renew. Energy Focus 2021, 38, 84–96. [Google Scholar] [CrossRef]
- Li, X.; Li, J.; Zhu, J.; Wang, Y.; Li, H. Study on control strategy of micro-grid combined with load switching. Heilongjiang Power 2015, 37, 353–356. [Google Scholar]
- Ping, J.; Pupu, C.; Yaodong, T. Multi-loop master-slave control strategy for smooth switching of microgrids. Acta Sci. Circumstantiae 2016, 14, 128–136. [Google Scholar]
- Li, Y. Study on Smooth Switching Control Strategy of Micro-Grid Based on Master-Slave Structure. Master’s Thesis, Xinjiang University, Ürümqi, China, 2016. [Google Scholar]
- Zhang, Y.; Feng, X.; Yu, H.; Ling, P.; Shi, S.; Yang, P. Study on Switching Strategy of Wind Power Storage Micro-Grid Mode. Electr. Meas. Instrum. 2016, 53, 38–50. [Google Scholar]
- Guo, L.; Wang, C.; Guo, L.; Cao, J. Dynamical characteristic of microgrid with peer to peer control. In Proceedings of the IEEE/CICED, Guangzhou, China, 10–13 December 2008; pp. 1–7. [Google Scholar]
- Zhao, X.; Wu, J.; Jenkins, N. An Overview Of Microgrid Control. Intell. Autom. Soft Comput. 2010, 16, 199–212. [Google Scholar]
- Juan, M.; Rey, P.M.; Velasco, M.; Miret, J. Secondary Switched Control with no Communications for Islanded Microgrids. IEEE Trans. Ind. Electron. 2017, 64, 8534–8545. [Google Scholar]
- Rat, C.L.; Ichim-Burlacu, C.; Panoiu, M. The impact of communication on microgrid control. In Proceedings of the International Conference on Applied Sciences (ICAS 2021), Banja Luka, Bosnia and Herzegovina, 24–28 May 2022; pp. 1–7. [Google Scholar]
- Bindhu, S.; Prabha, D.M.M.S.R. A Survey on Control and Communication of Smart Micro Grid. Indian J. Sci. Technol. 2015, 1–6, 8. [Google Scholar] [CrossRef]
- Zhou, X.; Cui, L.; Ma, Y. Research on control of micro grid. In Proceedings of the IEEE Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; pp. 1129–1132. [Google Scholar]
- Peng, F.Z.; Li, Y.W.; Tolbert, L.M. Control and protection of power electronics interfaced distributed generation systems in a customer driven microgrid. In Proceedings of the IEEE PES General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–8. [Google Scholar]
- Chen, H.; Zhang, X.; Liu, S.; Yang, S. Research on control strategies for distributed inverters in low-voltage microgrids. In Proceedings of the IEEE International Symposium on Power Electronics for Distributed Generation System, Hefei, China, 16–18 June 2010; pp. 748–752. [Google Scholar]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; Vicuna, L.G.; Castilla, M. Hierachical control of droop- controlled AC and DC microgrid—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Kosko, B. Fuzzy Engineering; Prentince Hall: Hoboken, NJ, USA, 1997; pp. 25–59. [Google Scholar]
- Logenthiran, T.; Naayagi, R.T.; Woo, W.L.; Phan, V.-T.; Abidi, K. Intelligent Control System for Microgrids Using Multi-Agent System. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1036–1045. [Google Scholar] [CrossRef]
- Mohammadi, E.; Alizadeh, M.; Asgarimogh, M. A Review on Application of Artificial Intelligence Techniques in Microgrids. IEEE J. Emerg. Sel. Top. Ind. Electron. 2022, 3, 878–890. [Google Scholar] [CrossRef]
- Gill, N. Artificial Neural Networks, Neural Networks Applications and Algorithms. 2018. Available online: https://www.xenonstack.com/ (accessed on 20 February 2024).
- Lv, L.; Wu, Z.; Zhang, L.; Gupta, B.B.; Tian, Z. An Edge-AI Based Forecasting Approach for Improving Smart Microgrid Efficiency. IEEE Trans. Ind. Inform. 2022, 18, 7946–7954. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.M.; Mohamed, R.; Hannan, M.A.; Al-Shetwi, A.Q.; Mansor, M.; Blaabjerg, F. Artificial Neural Network Based Particle Swarm Optimization for Microgrid Optimal Energy Scheduling. IEEE Trans. Power Electron. 2021, 36, 12151–12157. [Google Scholar] [CrossRef]
- Abbass Muhammad, J.; Lis, R.; Mushtaq, Z. Artificial Neural Network (ANN)-Based Voltage Stability Prediction of Test Microgrid Grid. IEEE Access 2023, 11, 58994–59001. [Google Scholar] [CrossRef]
- Mathworks. Design Neural Network Predictive Controller in Simulink. 25 August 2018. Available online: https://www.mathworks.com/help/deeplearning/ug/design.htm (accessed on 20 February 2024).
- Salehi, N.; Martínez-García, H.; Velasco-Quesada, G. Networked Microgrid Energy Management Based on Supervised and Unsupervised Learning Clustering. Energies 2021, 15, 4915. [Google Scholar] [CrossRef]
- Tomin, N.; Zhukov, A.; Domyshev, A. Deep Reinforcement Learning for Energy Microgrids Management Considering Flexible Energy Sources. EPJ Web Conf. 2019, 217, 01016. [Google Scholar] [CrossRef]
- Abdali, A.; Mazlumi, K.; Noroozian, R. A Precise Fault Location Scheme for Low-Voltage Dc Microgrids Systems Using Multi-Layer Perceptron Neural Network. Res. Artic. 2018, 36, 821–834. [Google Scholar]
- Moallem, P.; Razmjooy, N. A multi layer perceptron neural network trained by invasive weed optimization for potato color image segmentation. Trends Appl. Sci. Res. 2012, 7, 445–455. [Google Scholar] [CrossRef]
- Ravale, U.; Marathe, N.; Padiya, P. Feature selection based on genetic algorithm and support vector machine for intrusion detection system. Procedia Comput. Sci 2015, 45, 428–435. [Google Scholar] [CrossRef]
- Kakigano, H.; Miura, Y.; Ise, T. Distribution Voltage Control for DC Microgrids Using Fuzzy Control and Gain-Scheduling Technique. IEEE Trans. Power Electron. 2013, 28, 2246–2258. [Google Scholar] [CrossRef]
- Shan, Y.; Hu, J.; Chan Ka, W.; Islam, S. A Unified Model Predictive Voltage and Current Control for Microgrids with Distributed Fuzzy Cooperative Secondary Control. IEEE Trans. Ind. Inform. 2021, 17, 8024–8034. [Google Scholar] [CrossRef]
- Žarković, M.; Dobrić, G. Fuzzy expert system for management of smart hybrid energy microgrid. J. Renew. Sustain. Energy 2019, 11, 1–15. [Google Scholar] [CrossRef]
- Moreira Alexandre, C.; Paredes Helmo, K.M.; de Souza, W.A.; Marafão, F.P. Intelligent Expert System for Power Quality Improvement under Distorted and Unbalanced Conditions in Three-Phase AC Microgrids. IEEE Trans. Smart Grid 2017, 9, 6951–6960. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Azher, S.H. Adaptive PI secondary control for smart autonomous microgrid systems. Int. J. Adapt. Control Signal Process. 2015, 29, 1442–1458. [Google Scholar] [CrossRef]
- Barbosa, R.A.; de Almeida Souza, D.; da Nóbrega Tahim, A.P. Adaptive Control of DC Microgrid Using PI Controller and Fuzzy Inference. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference—Latin America (ISGT Latin America), Gramado, Brazil, 15–18 September 2019; pp. 1–6. [Google Scholar]
- Su, X.; Han, M.; Guerrero, J.M.; Sun, H. Microgrid stability controller based on adaptive robust total SMC. Energies 2015, 8, 1784–1801. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Q.; Wang, C.; Wang, N. A control strategy for microgrid inverters based on adaptive three-order sliding mode and optimized droop controls. Electr. Power Syst. Res. 2014, 38, 192–201. [Google Scholar] [CrossRef]
- Rahme, S.; Meskin, N. Adaptive sliding mode observer for sensor fault diagnosis of an industrial gas turbine. Control Eng. Pract. 2015, 38, 57–74. [Google Scholar] [CrossRef]
- Trivedi, R.; Khadem, S. Implementation of artificial intelligence techniques in microgrid control environment: Current progress and future scopes. Energy AI 2022, 8, 100147. [Google Scholar] [CrossRef]
- Zhou, S.; Qin, L.; Ruan, J.; Wang, J.; Liu, H.; Tang, X.; Wang, X.; Liu, K. An AI-Based Power Reserve Control Strategy for Photovoltaic Power Generation Systems Participating in Frequency Regulation of Microgrids. Electronics 2023, 12, 2075. [Google Scholar] [CrossRef]
- Dong, W.; Li, S.; Fu, X. Artificial Neural Network Control of A Standalone DC Microgrid. In Proceedings of the 2018 Clemson University Power Systems Conference (PSC), Charleston, SC, USA, 4–7 September 2018; pp. 1–5. [Google Scholar]
- Boujoudar, Y.; Azeroual, M.; Elmoussaoui, H.; Lamhamdi, T. Intelligent control of battery energy storage for microgrid energy management using ANN. Int. J. Electr. Comput. Eng. 2021, 11, 2760–2767. [Google Scholar] [CrossRef]
- Rehimi, S.; Mirzaei, R.; Bevrani, H. ANN-Based Frequency and Tie-Line Power Control in Interconnected Microgrids. In Proceedings of the 2019 6th International Conference on Control, Instrumentation and Automation (ICCIA), Sanandaj, Iran, 30–31 October 2020; pp. 1–5. [Google Scholar]
- Chettibi, N.; Mellit, A.; Sulligoi, G.; Pavan, A.M. Adaptive Neural Network-Based Control of a Hybrid AC/DC Microgrid. IEEE Trans. Smart Grid 2018, 9, 1667–1679. [Google Scholar] [CrossRef]
- Lopez-Garcia, T.B.; Coronado-Mendoza, A.; Domínguez-Navarro, J.A. Artificial neural networks in microgrids: A review. Eng. Appl. Artif. Intell. 2020, 95, 103894. [Google Scholar] [CrossRef]
- Arwa, E.O.; Folly, K.A. Reinforcement Learning Techniques for Optimal Power Control in Grid-Connected Microgrids: A Comprehensive Review. IEEE Access 2020, 8, 208992–209007. [Google Scholar] [CrossRef]
- Angalaeswari, S.; Swathika, O.V.G.; Ananthakrishnan, V.; Daya, J.L.F.; Jamuna, K. Efficient Power Management of Grid operated MicroGrid Using Fuzzy Logic Controller (FLC). In Proceedings of the 1st International Conference on Power Engineering, Computing and CONtrol, PECCON-2017, Chennai, India, 2–4 March 2017; pp. 268–274. [Google Scholar]
- Maged, N.A.; Hasanien, H.M.; Ebrahim, E.A.; Tostado-Véliz, M.; Turky, R.A.; Jurado, F. Optimal Real-time implementation of fuzzy logic control strategy for performance enhancement of autonomous microgrids. Int. J. Electr. Power Energy Syst. 2023, 151, 109140. [Google Scholar] [CrossRef]
- Al Badwawi, R.; Issa, W.R.; Mallick, T.K. Supervisory Control for Power Management of an Islanded AC Microgrid Using a Frequency Signalling-Based Fuzzy Logic Controller. IEEE Trans. Sustain. Energy 2019, 10, 94–104. [Google Scholar] [CrossRef]
- Vu, T.V.; Perkins, D.; Diaz, F.; Gonsoulin, D.; Edrington, C.S.; El-Mezyani, T. Robust adaptive droop control for DC microgrids. Electr. Power Syst. Res. 2017, 146, 95–106. [Google Scholar] [CrossRef]
- Teimourzadeh, S.; Aminifar, F.; Davarpanah, M.; Shahidehpour, M. Adaptive Control of Microgrid Security. IEEE Trans. Smart Grid 2018, 9, 3909–3910. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | References | Mentioned Content | Object | Advantage | Disadvantage |
|---|---|---|---|---|---|
| Jaynendra Kumar et al. (2023); Anand Abhishek et al. (2020). | [8,9] | The controllers are utilized within the MG. | DCMG | Detailed examination of topics related to energy management, power management, multilevel control, and basic control. | The DCMG is the only MG that is specifically mentioned, excluding other types of microgrids. |
| Sajjad M. Kaviri et al. (2017) | [10] | Analysis of hierarchical MG control. | ACMG | Consider and evaluate the working process in hierarchical MG control. | These controllers only apply to the ACMG. |
| Magdi S Mahmoud et al. (2017) | [11] | The most popular kinds of controller algorithms in MG are covered in this paper. | Hybrid | Examine in detail every kind of intelligent algorithm that can be used with controllers. | Without doing a detailed analysis of the subjects, the study content is limited to a listing. |
| Xuesong Zhou et al. (2015) | [12] | Application guidelines for several MGs in industrialized nations, including the US, Japan, EU countries, and China, are mentioned in detail in the paper. | Hybrid | Clearly analyze the binding requirements for each country when operating a microgrid. | Controllers are not specifically mentioned. |
| Safia Babikir Bashir et al. (2023) | [13] | This paper delves into great detail about power converters used in energy conversion and power delivery. | Hybrid | The structure and connection circuit diagram of the power converter are mentioned in detail in this analysis. | The control strategies used with this kind of device are not thoroughly examined; only the categorization of power converters and their operating principles are covered. |
| Ayşe Kübra Erenoğlu et al. (2021) | [14] | Based on the assessment of published and implemented research on algorithms applied to controllers, the existing super power grid and its future developments are formed. | Hybrid | MGs’ application controllers provide a very thorough listing and assessment of the methods used. | The assessment material is not object-specific; rather, it is quite generic. The lists that have been made have not been thoroughly examined. |
| Ijaz Ahmed et al. (2023) | [15] | The study only focuses on evaluating the control layer in the ACMG power grid. | ACMG | Specific analysis of grid code requirements and applied methods in control layering. | There is no mention of the controller’s methods for microgrids. |
| Declaration of the differences (Content of our paper) | An overview and in-depth examination of the control strategies and algorithms used in the MG, together with an evaluation of the technology’s future development and potential. | Both | Evaluate and clearly classify the controllers and control modes for each different type of MG and make a clear evaluation based on the advantages and disadvantages of each method. | Only evaluate the most common and similar content. |
| Reference | Type of MG | Specifications (Summary of the Review Study) |
|---|---|---|
| Adel El-Shahat et al. [32] | DC | Introduction and in-depth analysis of MG-integrated PV solar systems, focusing on applied algorithms for control layers to enhance MG system performance. |
| K. R. Bharath et al. [33] | DC | The author, along with others, provides an overview of control methods used in DCMGs. They also assess and analyze these techniques in detail and predict future development in control technique related to DCMGs. |
| Manoj Lonkar et al. [34] | DC | The paper discusses control and energy management techniques applied to the DCMGs, focusing on power-sharing solutions for each DG that must tailored to various operating condition. |
| Ying Wu et al. [35] | AC | The paper highlights the advantages of small-signal modeling techniques, summarizes current approaches used for ACMGs, and synthesizes and analyzes complex topics while exploring MG models. |
| Yousef Khayat et al. [36] | AC | This work aims to enhance the energy management and reliability of MGs by summarizing secondary control mechanisms within the hierarchical control of autonomous operation. |
| Xiaochao Hou et al. [37] | AC | The author and others discuss control solutions applied to ACMGs in both grid connected and islanded modes. |
| Ángel Navarro-Rodríguez et al. [38] | Hybrid | The work addresses the dynamic voltage control of AC and DC in a hybrid MG with distributed and central BESSs, focusing on power sharing among the various components within the MG. |
| Farzam Nejabatkhah et al. [39] | Hybrid | The study provides an overview of power quality control in smart hybrid MGs. It examines various categories of power quality issues, using real-world examples of hybrid MGs, including data centers, electric train networks, and electric vehicle charging stations. |
| Shamsher Ansari et al. [40] | Hybrid | The paper provides a summary of the latest advancements in hybrid MG control methods and the associated power converter control techniques. |
| Level Control | Activities of the Level of Control |
|---|---|
| First level (Milliseconds, Seconds) | Maintaining voltage within a stable, allowable level. |
| Ensuring grid frequency remains constant. | |
| Facilitating power sharing among components. | |
| Implementing protective devices to ensure the safe operation of network systems. | |
| Second level (Seconds, Minutes, Hours) | Compensating for frequency error identified by the primary control level. |
| Correcting voltage error detected by the primary control level. | |
| Calculating grid synchronization parameters. | |
| Determining frequency and voltage deviation to appropriately inject power into or absorb power from the grid. | |
| Third level (Minutes, Hours, Days) | Selecting the grid or islanded mode of operation. |
| Managing faults effectively. | |
| Ensuring a low-voltage ride through capability. | |
| Optimizing parameters such as cost, performance, and other relevant factors. | |
| Coordinating multiple microgrids. | |
| Participating in the market. |
| Level of Hierarchy | Activities of the Level of Control |
|---|---|
| First level (Milliseconds, Seconds) | Voltage regulation |
| Current sharing | |
| Second level (Seconds, Minutes, Hours) | Power flow control |
| Synchronization management | |
| Restores voltage deviation | |
| Recover current deviation | |
| Third level (Minutes, Hours, Days) | Select the operation mode: islanded mode or grid mode |
| Control and monitor the entire system | |
| Control absorption or injection of power | |
| Power management |
| Factors of System | Centralized Control | Decentralized Control | Distributed Control |
|---|---|---|---|
| Target | Specific tasks | Uncertain tasks | A clear single task |
| Number of controller | Single | Multiple | Multiple |
| Optimal | Optimal solutions | Sub-optimal | Optimal solutions |
| Commercialization | Complex, every component works together | Easy programs, some that are competitive | Easy programs, some that are competitive |
| Flexibility in system | Lowest | High | Higher |
| System expansion | Complicated | Simple | Moderate |
| Plug and play | Not possible | Possible and easy | Possible and easy |
| Repair and fix | Troublesome | Easy | Easy |
| Real-time processing | High | Low | Moderate |
| Initial expenses | Higher | Lower | Even lower |
| More critical operation | Possible | Not possible | Lowest |
| Failure occurs | If one point is faulty | If many points are faulty | If one point is faulty |
| Ask central controller | Yes | No | No |
| Asking signal collection | From all the essential MG components | Only local information | Both local measurement and neighboring communication |
| Operating personnel | Available | Not available | Available |
| Reliability | Uncertain | Acceptable | Acceptable |
| Actions | Master–Slave | Peer–to-Peer | Hybrid |
|---|---|---|---|
| Number of controllers | Need a central controller for processing | Multiple identical peer controllers | Multiple controllers and combination of two controller types |
| Error | Single point of failure | No single point of failure | Both |
| Communications | Information linkage between microscopic sources | No need to connect information, independent processing at micro-sources | A combination of both types of information links is needed to process the system |
| Add more controllers | Because of the initial configuration, it is not possible | Very easy, just plug and play | Difficult because it depends on the master control mode |
| Cost | Average | Less | High |
| Practical application | Widely used in demonstration projects | Used in a number of laboratory MGs | Deploy small quantity testing |
| Maintenance | Difficulty | Easy | Complicated |
| Setting | Proprietary solution | Plug and play | Proprietary solution |
| Type of MG | Control Method | Reference | Advantage | Disadvantage |
|---|---|---|---|---|
| Hybrid MG | Artificial Intelligence (AI) | [66] | AI algorithms enable quick solutions without the need for exact model parameters. |
|
| PV integration | Artificial Intelligence (AI) | [87] | Improved frequency fluctuation of the MG when integrating PV systems, with enhancement of 73.36% under changing financial conditions and 62.87% under varying environmental conditions compared to traditional methods. |
|
| Standalone DCMG | Artificial Neural Network (ANN) With Droop Control | [88] | Quickly stabilizes the independent micro-DC grid voltage under the impact of load disturbances compared to the reference voltage. |
|
| Battery energy storage | Artificial Neural Network (ANN) | [89] | The applied ANN controller significantly improved the convergence speed of the MG’s voltage. This improvement is particularly noticeable when using the two-way backup power supply from the battery, demonstrating high effectiveness. The ANN controller also allows for the simultaneous processing multiple of multiple input signals. |
|
| ACMG | Artificial Neural Network (ANN) With Adaptive Control | [90] | The controller combines ANN and adaptive algorithms, allowing for the easy control of frequency and power when connected to the grid. |
|
| Hybrid MG | Neural Network (NN) | [91] | Effective nonlinear input signal processing helps to quickly track maximum power points with stable, mixed input sources in real time. |
|
| MG | Neural Network (NN) | [92] | The algorithm allows participation in control at both the first and second layers in MG control, aiding in the rapid and stable tracking of the maximum power point. |
|
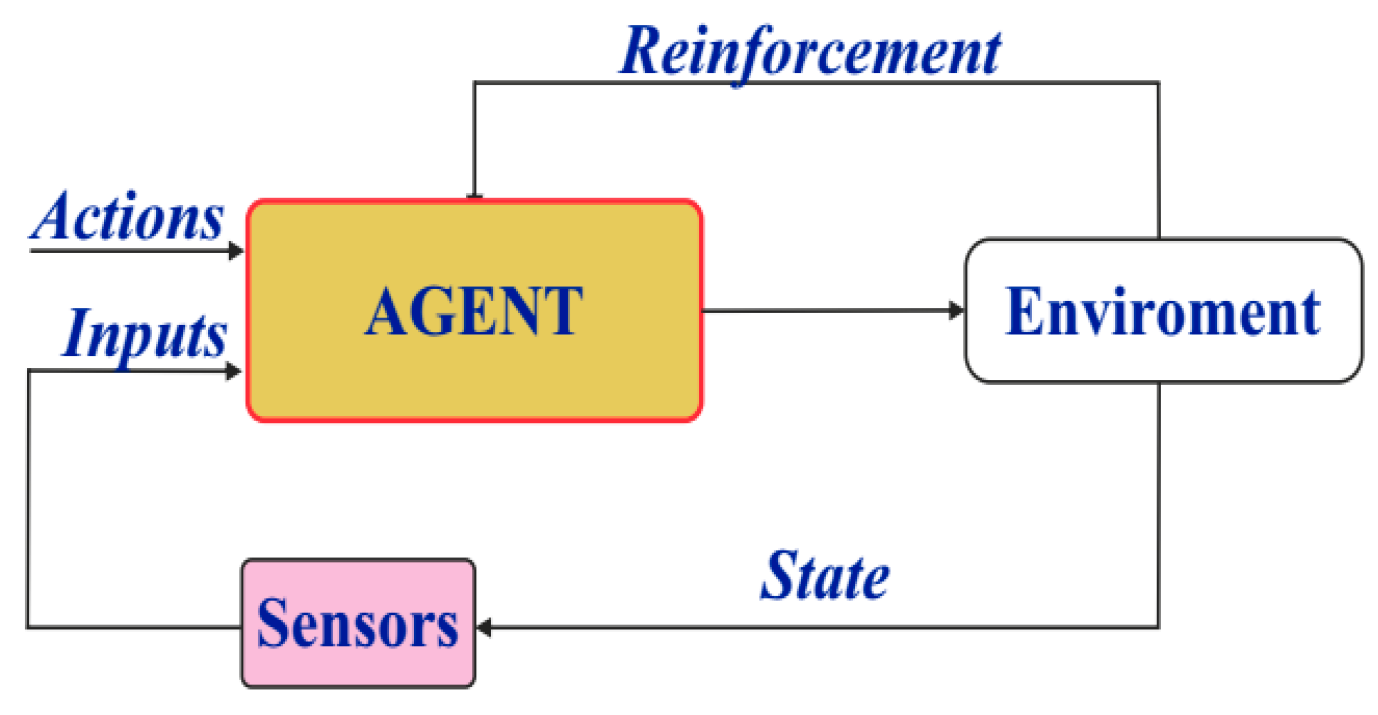
| RES | Reinforcement Learning Control | [93] | Multi-agent processing is stable in real time. Capable of online processing with high performance and fast speed. | The direction for finding an implementation plan can easily be lost during a major incident. |
| PV system | Fuzzy Logic (FL) | [94,95] | Simple processor with fast convergence speed for tracking maximum power points, ensuring stable power while integrating storage for grid connection. | Experience is required to develop a rule set. |
| Effective islanded ACMG | Fuzzy Logic (FL) | [96] | A Fuzzy Logic controller applied to islanded ACMG provides instantaneous response speed compared to traditional control methods, without requiring extensive communication links with other controllers. | Oscillation in the converters can still occur when multiple input sources are combined. |
| DCMG | Adaptive Control | [97] | The system offers fast response times, simple voltage and current sharing, and straightforward implementation algorithms. | When there are many input agents, there may be a certain delay. |
| ACMG | Adaptive Control | [98] |
| The communication link when processing multiple signals was not evaluated. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mussetta, M.; Le, X.C.; Trinh, T.H.; Doan, A.T.; Duong, M.Q.; Tanasiev, G.N. An Overview of the Multilevel Control Scheme Utilized by Microgrids. Energies 2024, 17, 3947. https://doi.org/10.3390/en17163947
Mussetta M, Le XC, Trinh TH, Doan AT, Duong MQ, Tanasiev GN. An Overview of the Multilevel Control Scheme Utilized by Microgrids. Energies. 2024; 17(16):3947. https://doi.org/10.3390/en17163947
Chicago/Turabian StyleMussetta, Marco, Xuan Chau Le, Trung Hieu Trinh, Anh Tuan Doan, Minh Quan Duong, and Gabriela Nicoleta Tanasiev. 2024. "An Overview of the Multilevel Control Scheme Utilized by Microgrids" Energies 17, no. 16: 3947. https://doi.org/10.3390/en17163947
APA StyleMussetta, M., Le, X. C., Trinh, T. H., Doan, A. T., Duong, M. Q., & Tanasiev, G. N. (2024). An Overview of the Multilevel Control Scheme Utilized by Microgrids. Energies, 17(16), 3947. https://doi.org/10.3390/en17163947