
Estimation of Railway Line Impedance at Low Frequency Using Onboard Measurements Only


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- First, analytical expressions [10,11] or numerical methods [12] using material and geometrical data; in this case, consolidated expressions are used (e.g., Carson’s equations [10]) starting from accurate and/or conservative estimates of conductors’ geometry and data; geometry changes are mainly due to the transition from open-air to tunnel sections, as considered in [11,13].
- Second, more accurately relying on measurement results, using for example volt-amperometric, reflectometry or bridge methods (the former being best suited for industrial environments and, in particular, railways); the measured data are then used to fit a predetermined model, for instance, of the type used in the first approach above. Examples are the RL model fitted in [14] by means of a recursive model identification algorithm based on a quadratic cost function; and [15], by means of a Kalman filter. Other methods are, for example, volt-amperometric and vector network analyzer (reflectometric) methods for grid impedance measurement, including power converters [16,17].
2. Existing Methods for Line Parameter Estimation
- Active methods inject an excitation signal to probe network impedance by measuring voltage and current during the excitation and soon after that. Excitation signals have been extensively analyzed and optimized for frequency spectrum coverage and reconstruction performance, or, in other words, achievable frequency resolution and signal-to-noise ratio [34,35].
- Passive methods exploit existing measured quantities, passively listening to the network. Several signal characteristics have been considered to maximize detectability, such as using traveling waves generated by disturbances to obtain the line propagation constant [36]. In general, the focus is on numerical methods for reduction of indeterminacy and improvement of the signal-to-noise ratio by exploiting an increased number of measurements (e.g., using least mean squares, Lagrangian multipliers, Kalman filter, empirical weighting criteria [15,37,38,39]).
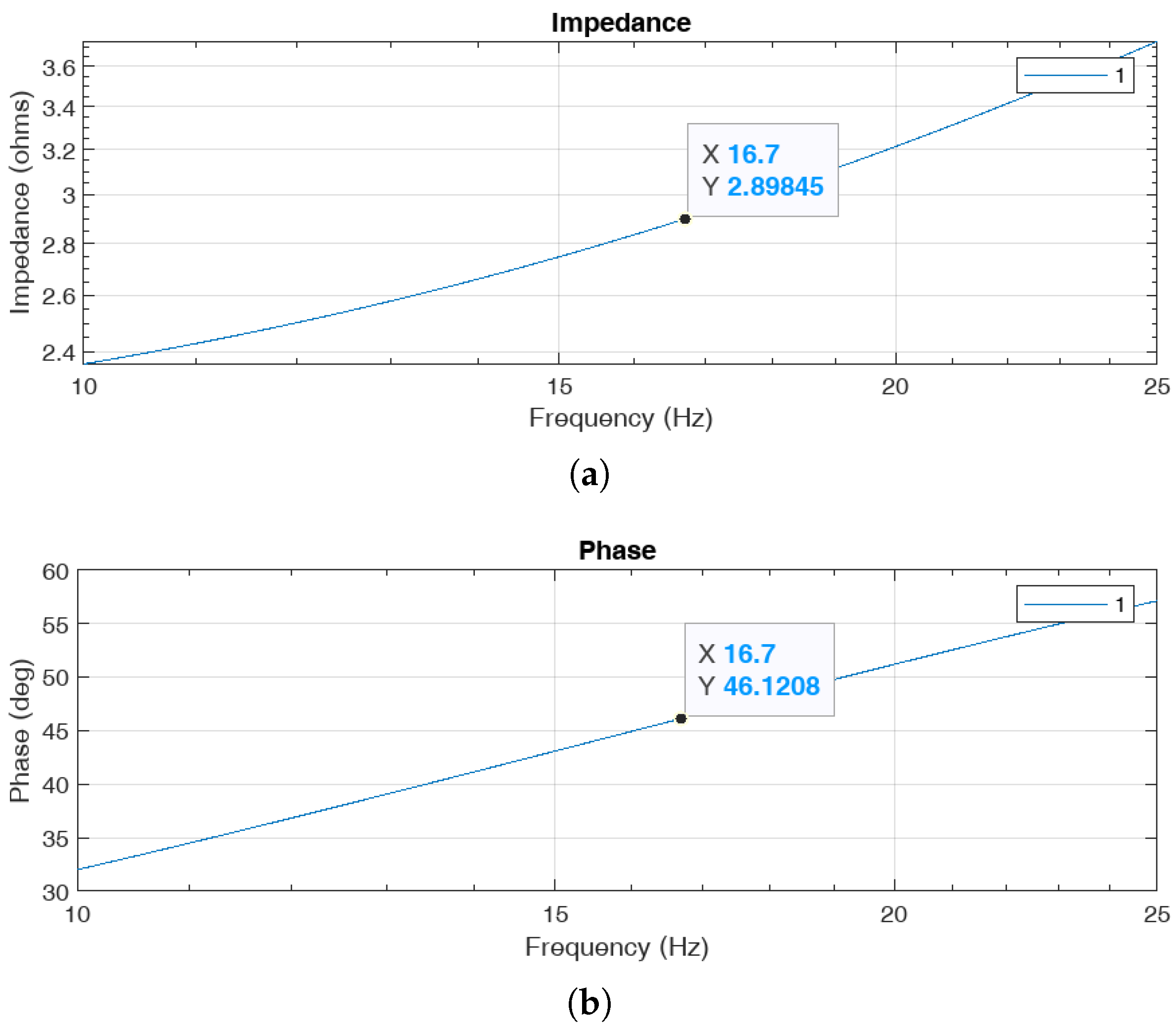
- For DC railways the first line resonance is mainly determined by the interaction with the traction power station (TPS), and, in particular, with the output resonant filter [41]; resonances at higher frequency are related to the catenary distribution system and can be predicted by transmission line theory [41,42]. Other resonant circuits can be identified in the input filters onboard locomotives, showing a very low resonance frequency, on the order of 10 Hz to 20 Hz [43]; more complex oscillation patterns, also related to the position of the train along the line, may take place, as extensively investigated in [44].
3. Proposed Methods for Line Impedance Estimation
3.1. Method Based on Least Mean Squares Solution of Over-Determined System
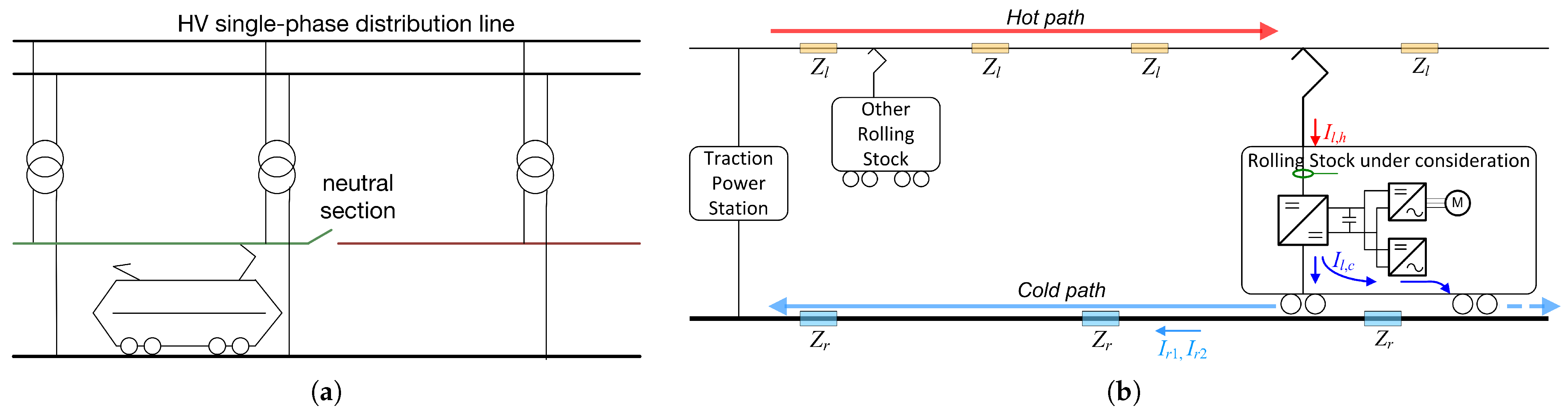
- The spanned position along the line over one solution interval is longer, causing a more evident change in , as the tapping point P moves; the equations of the ideal dependency on the train position are summarized in [8] for two configurations, accounting for supply from one or two TPSs;
- The electrical behavior of rolling stock along the line section becomes more variable and the assumption of a steady operating mode over the interval becomes more inconsistent, with more significant variations in the absorbed power and instantaneous input admittance.
3.2. Method Based on Auto- and Cross-Spectra
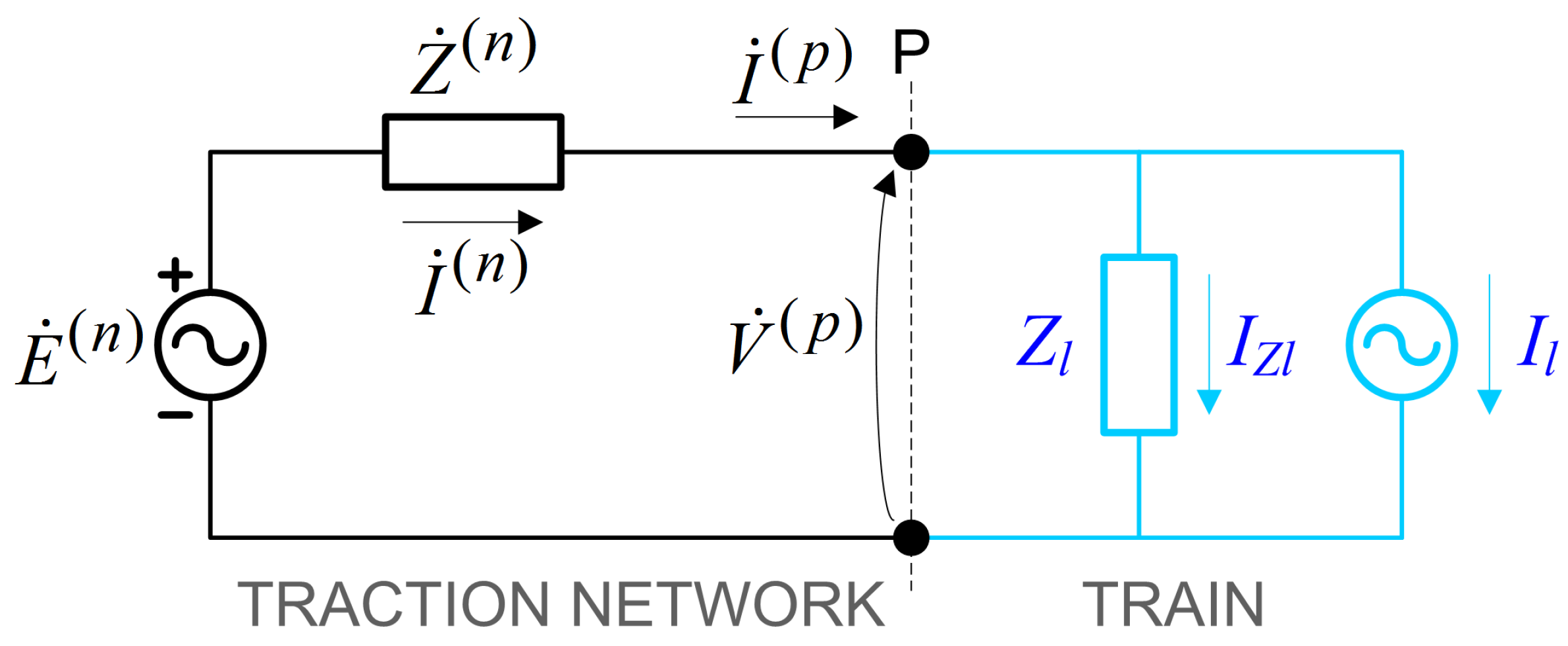
- , : In this case, no perturbed state is available and the network impedance cannot be estimated;
- , : This is the case of interest where the network is “quiet” and the excitation comes from the rolling stock side;
- , : In this case, the network has voltage variations, but the rolling stock side does not; this is the case, for example, in standstill or coasting, where power absorption by the rolling stock is minimal, and this is discarded by setting a threshold of significance on the current amplitude;
- , : This case is similar to case 2, where changes to the network voltage cannot be excluded; this is the general case that cannot be excluded, but whose occurrence can be minimized by taking a sufficiently small time horizon, as already mentioned for the LMS algorithm and the value of M; in the end any change in E represents a disturbance.
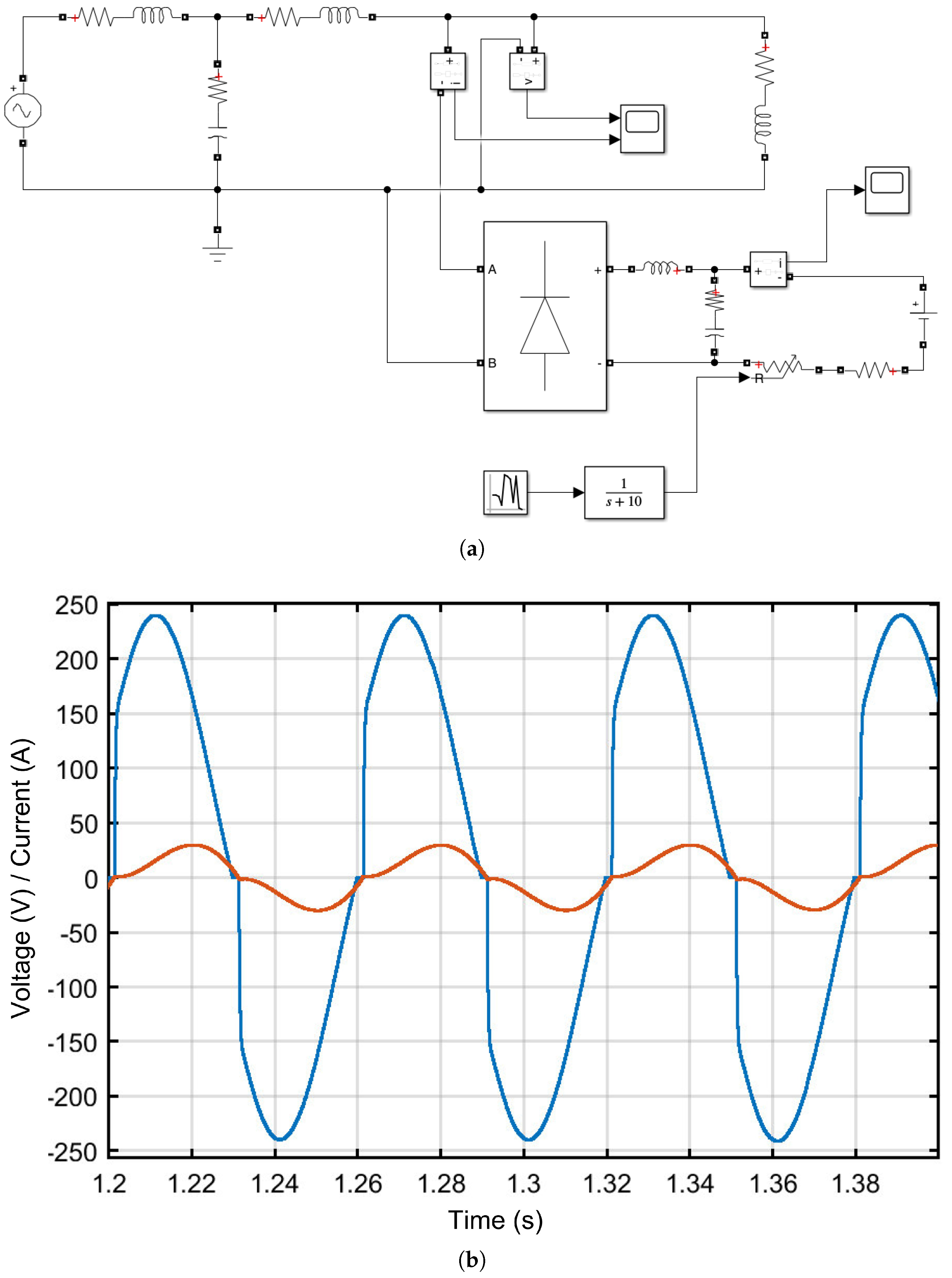
4. Preliminary Verification with Synthetic Data
5. Results and Verification with Experimental Data
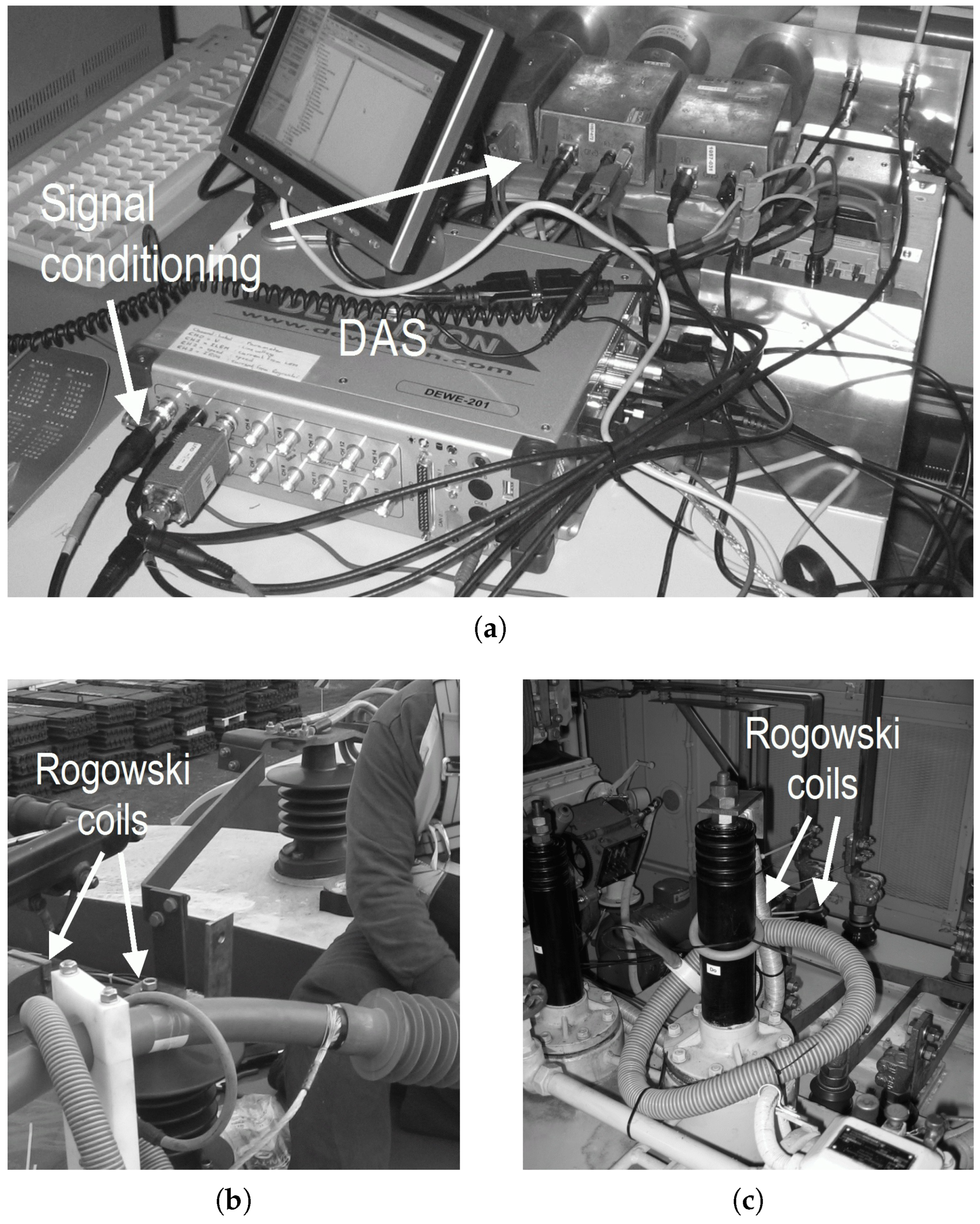
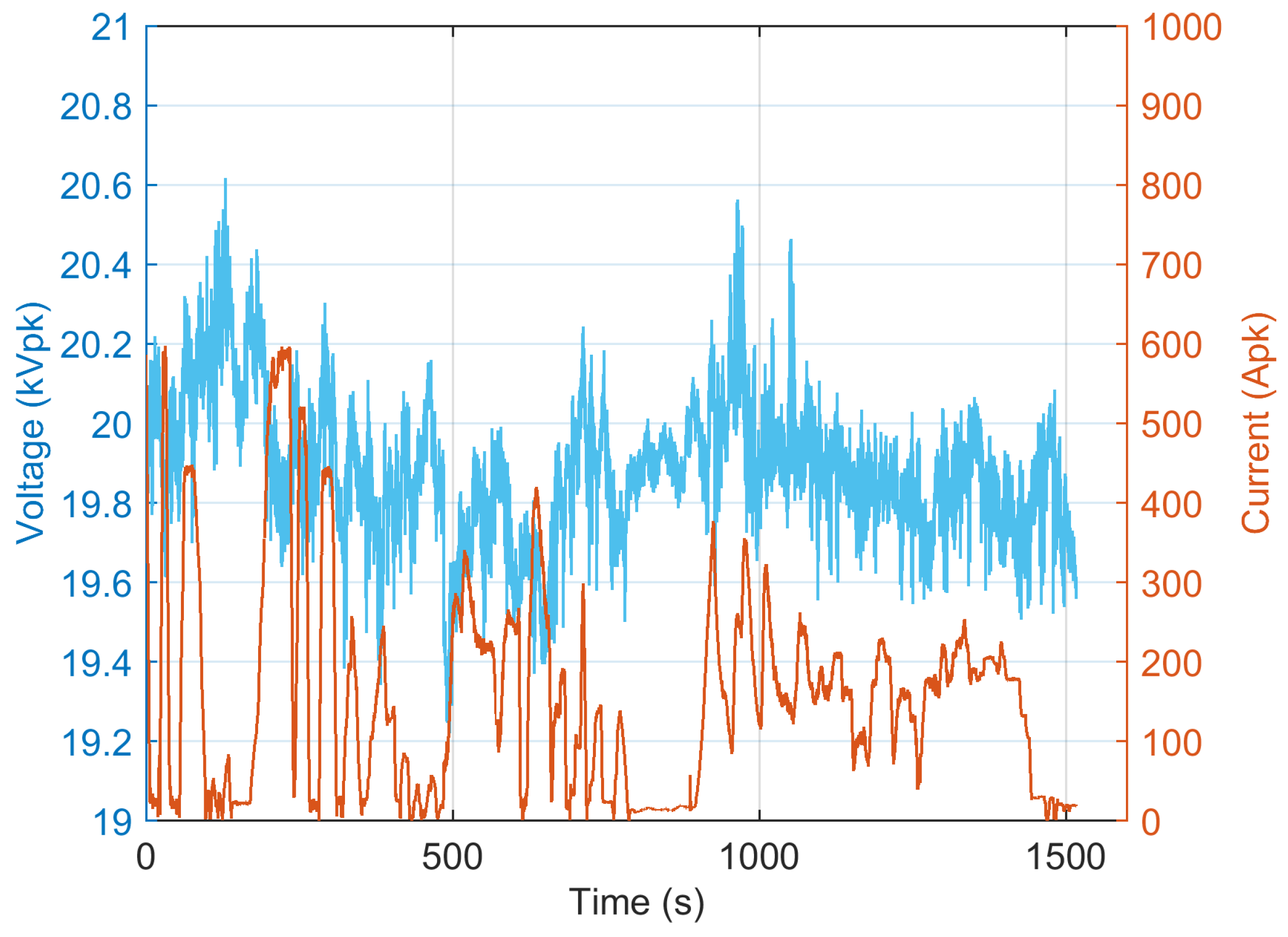
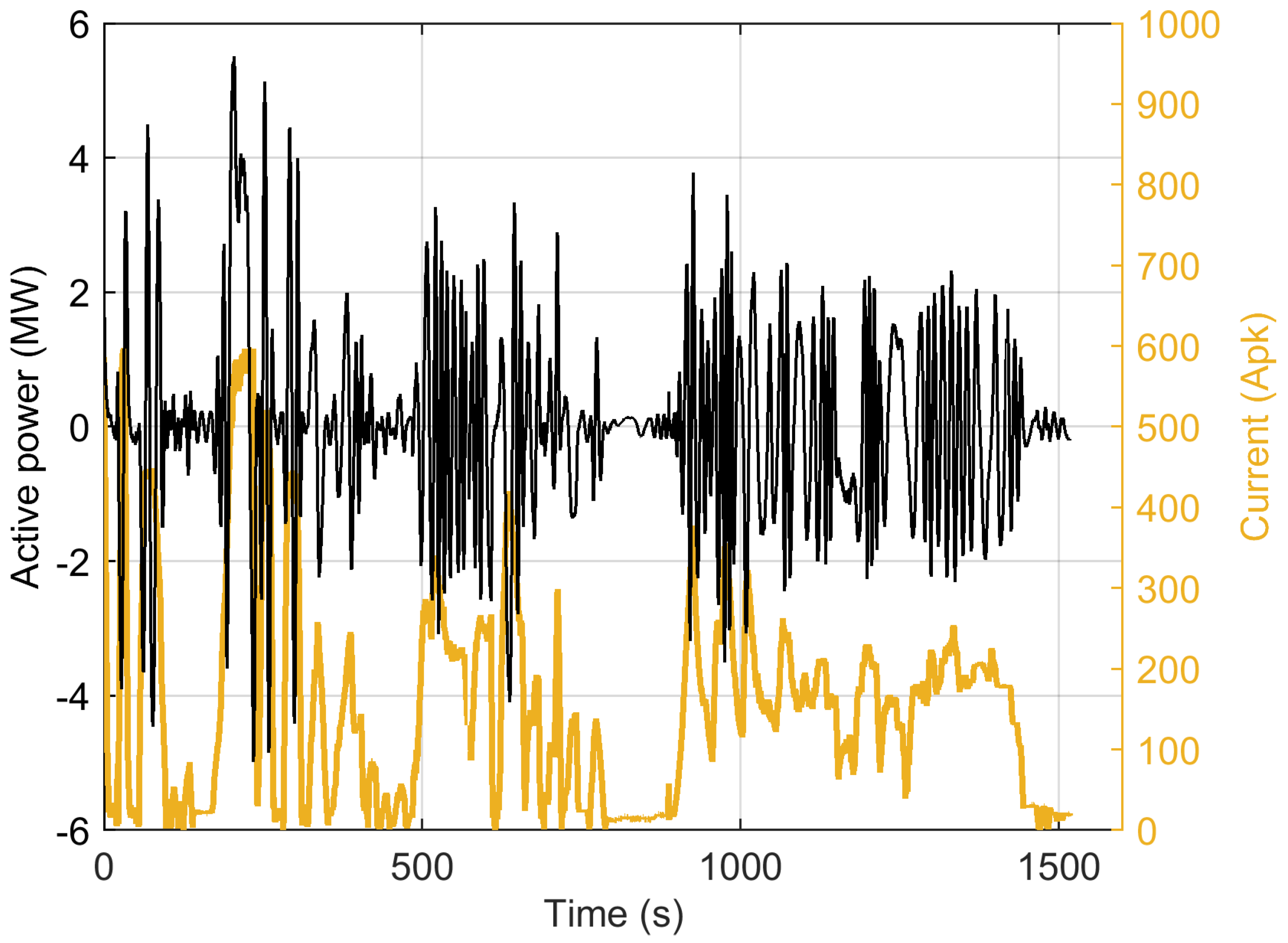
5.1. Description of the Measurement Setup and Collected Data
5.2. Details of Data Used for the Verification
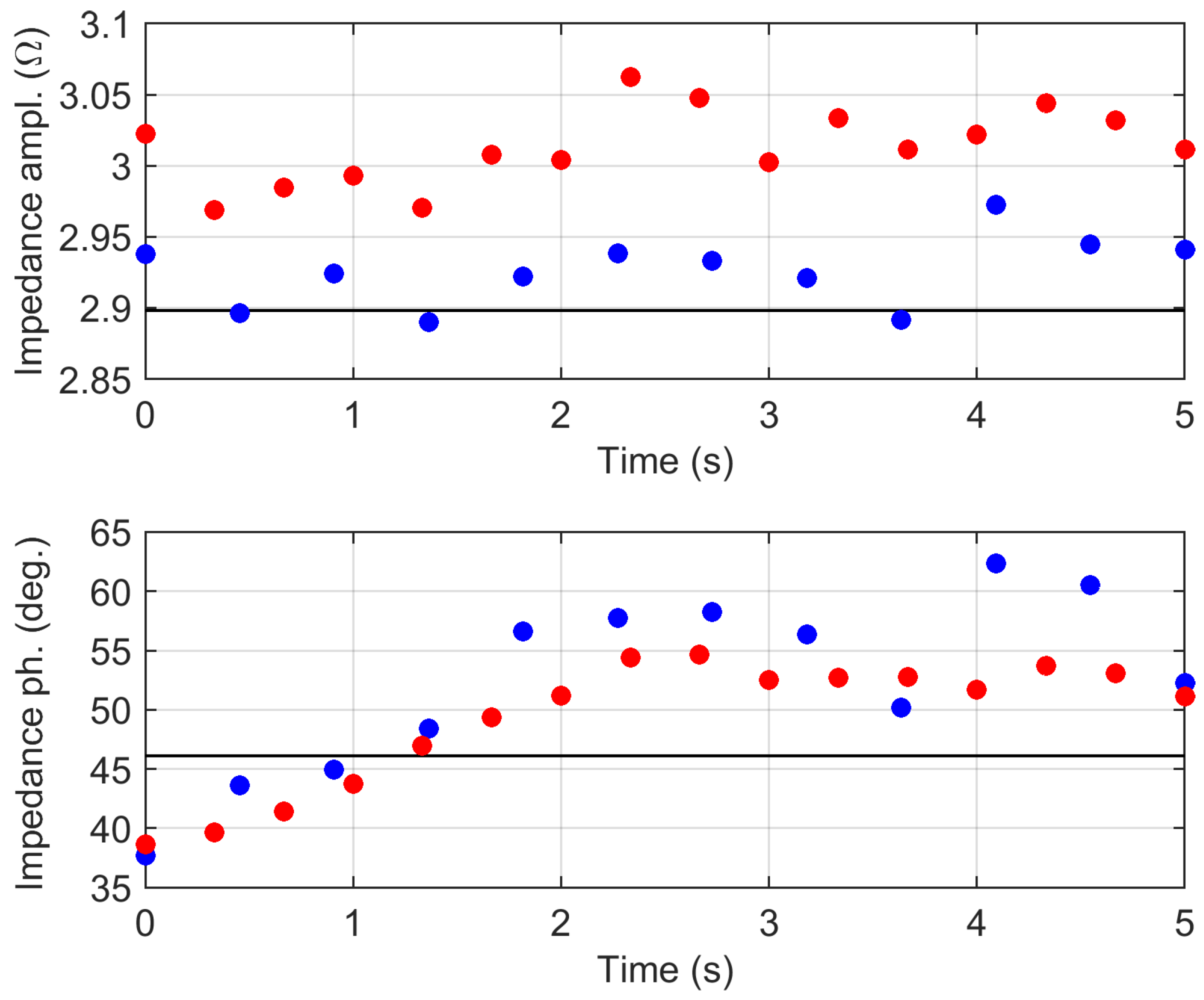
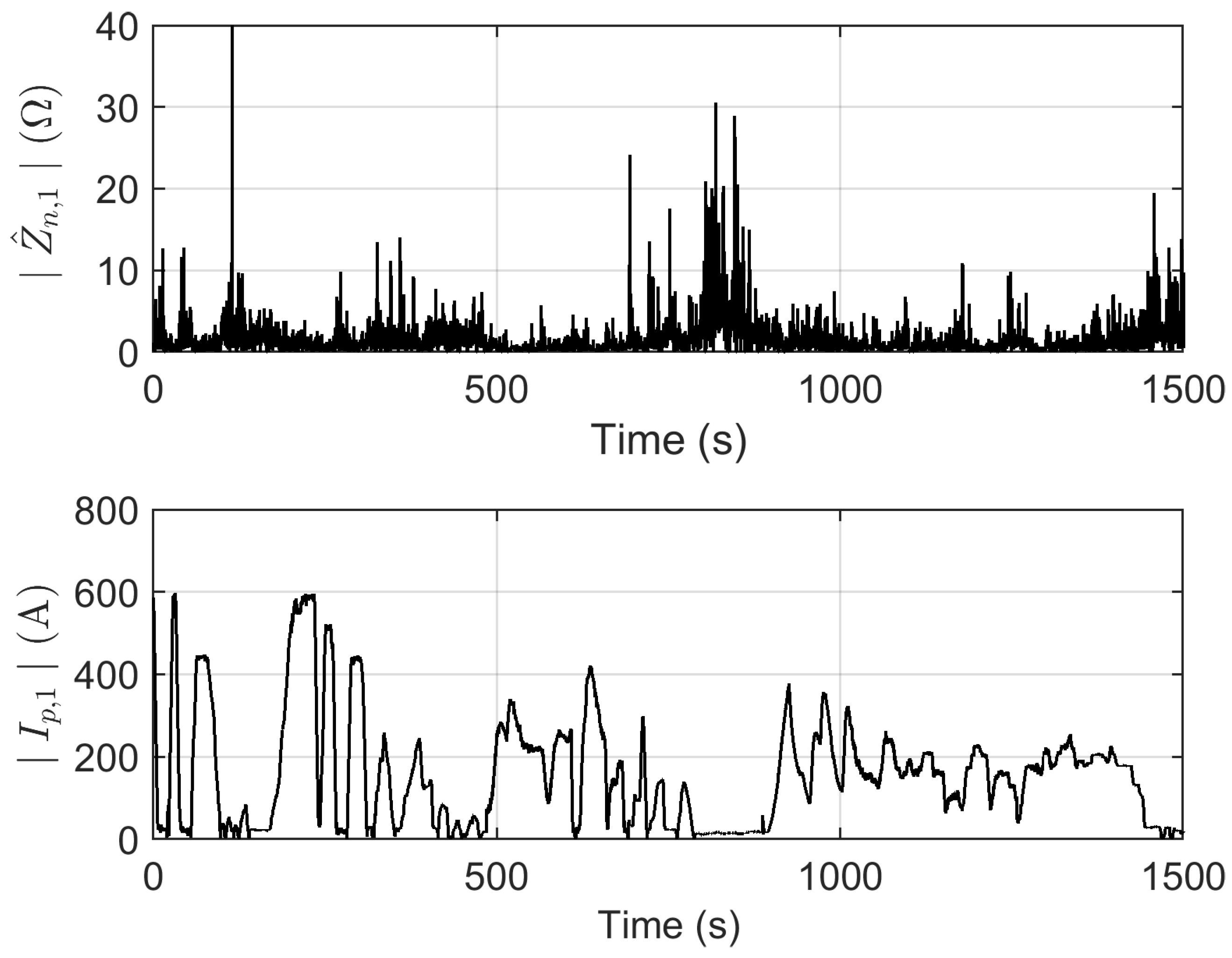
5.3. Estimate of Line Impedance at the Fundamental Using All Data
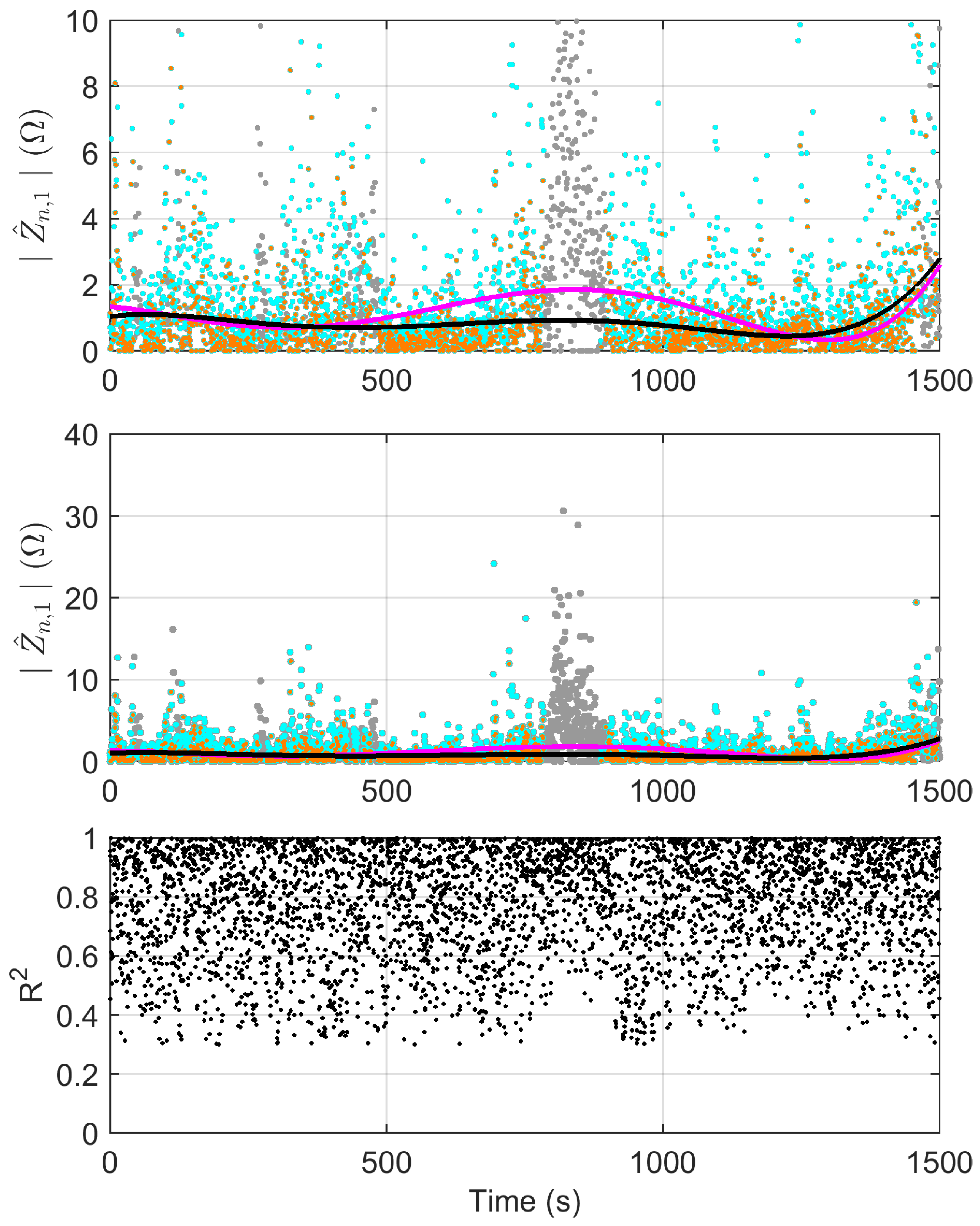
5.4. Line Impedance Estimate Discarding Low-Current-Intensity Data
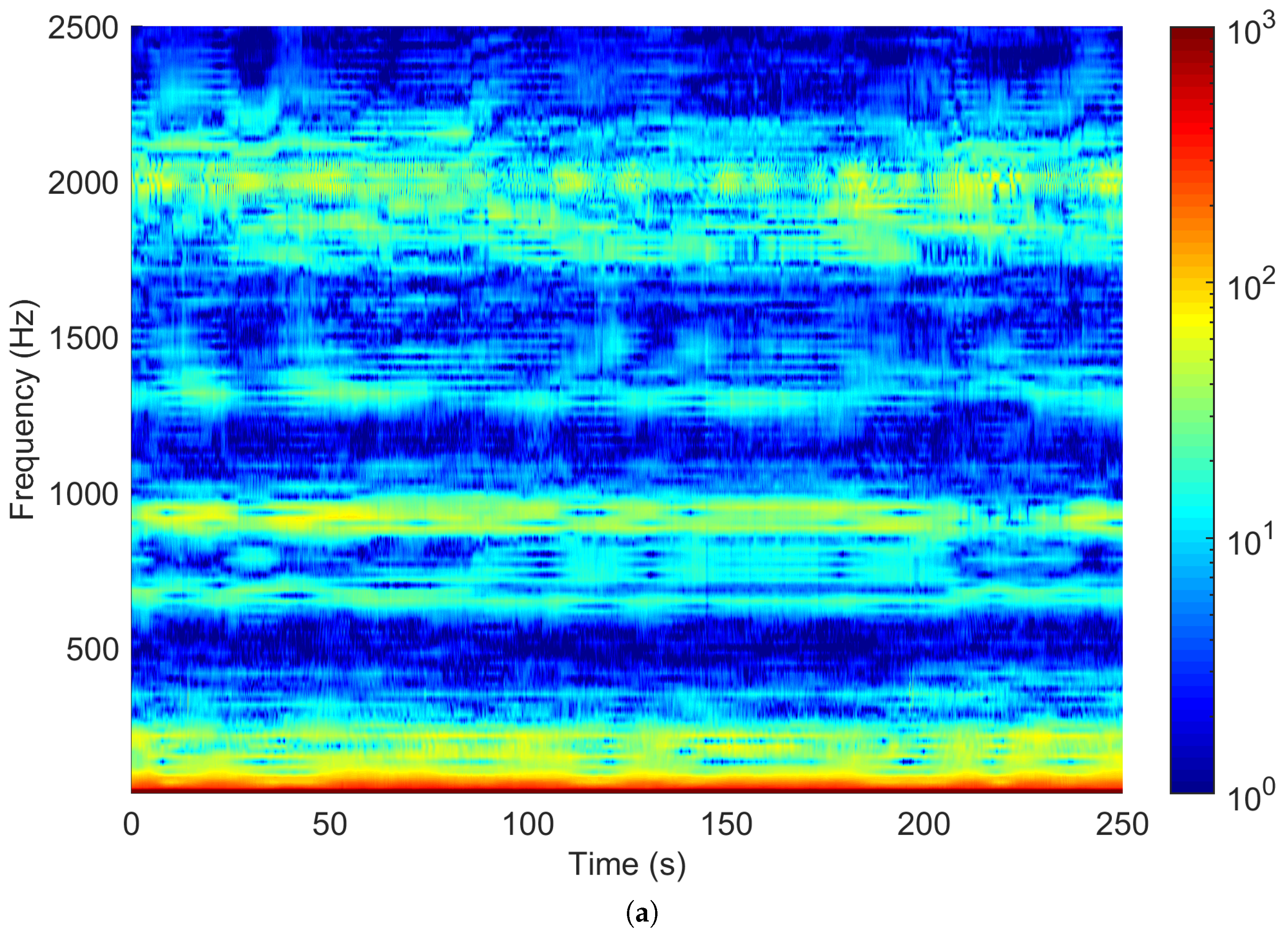
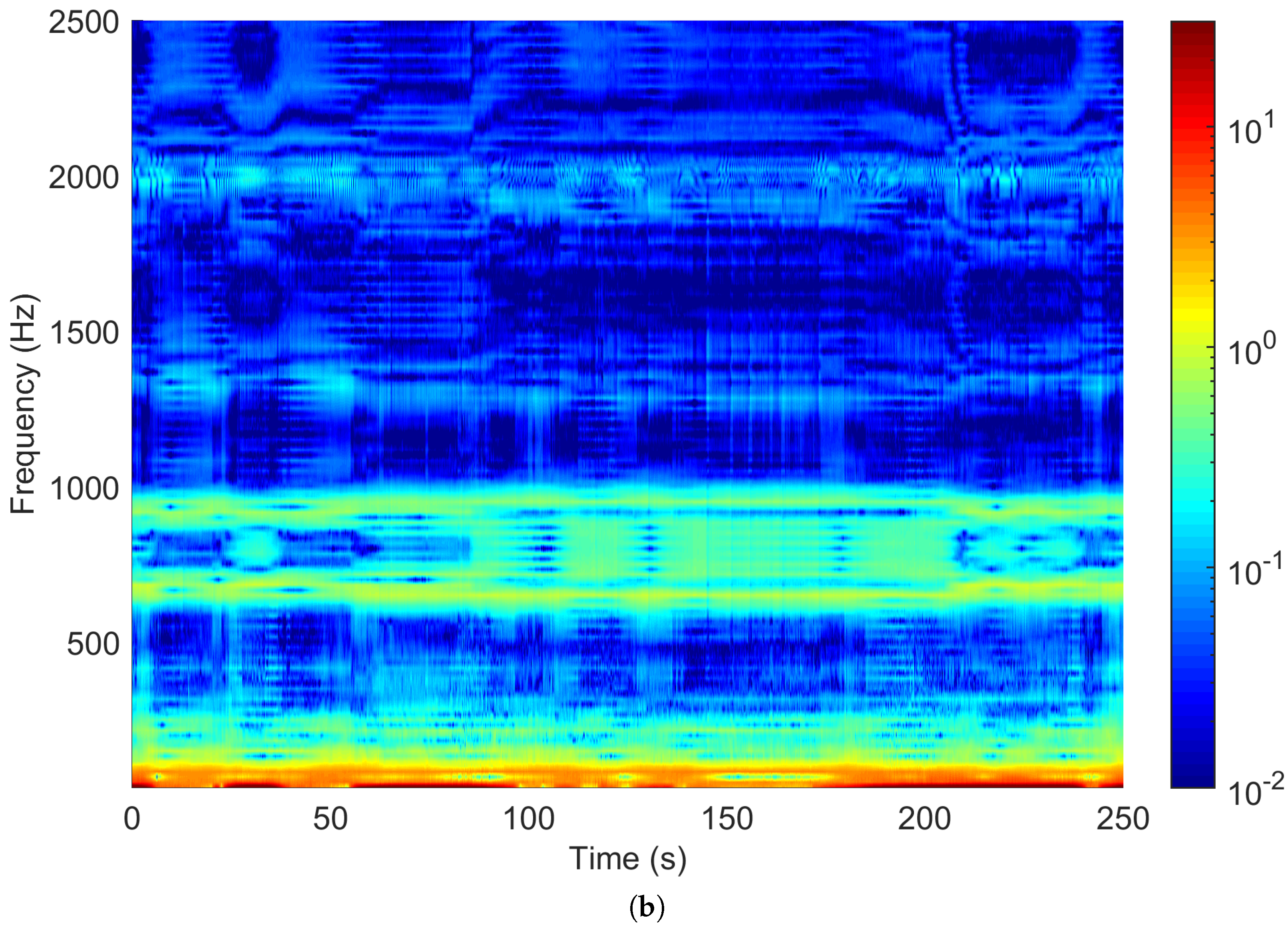
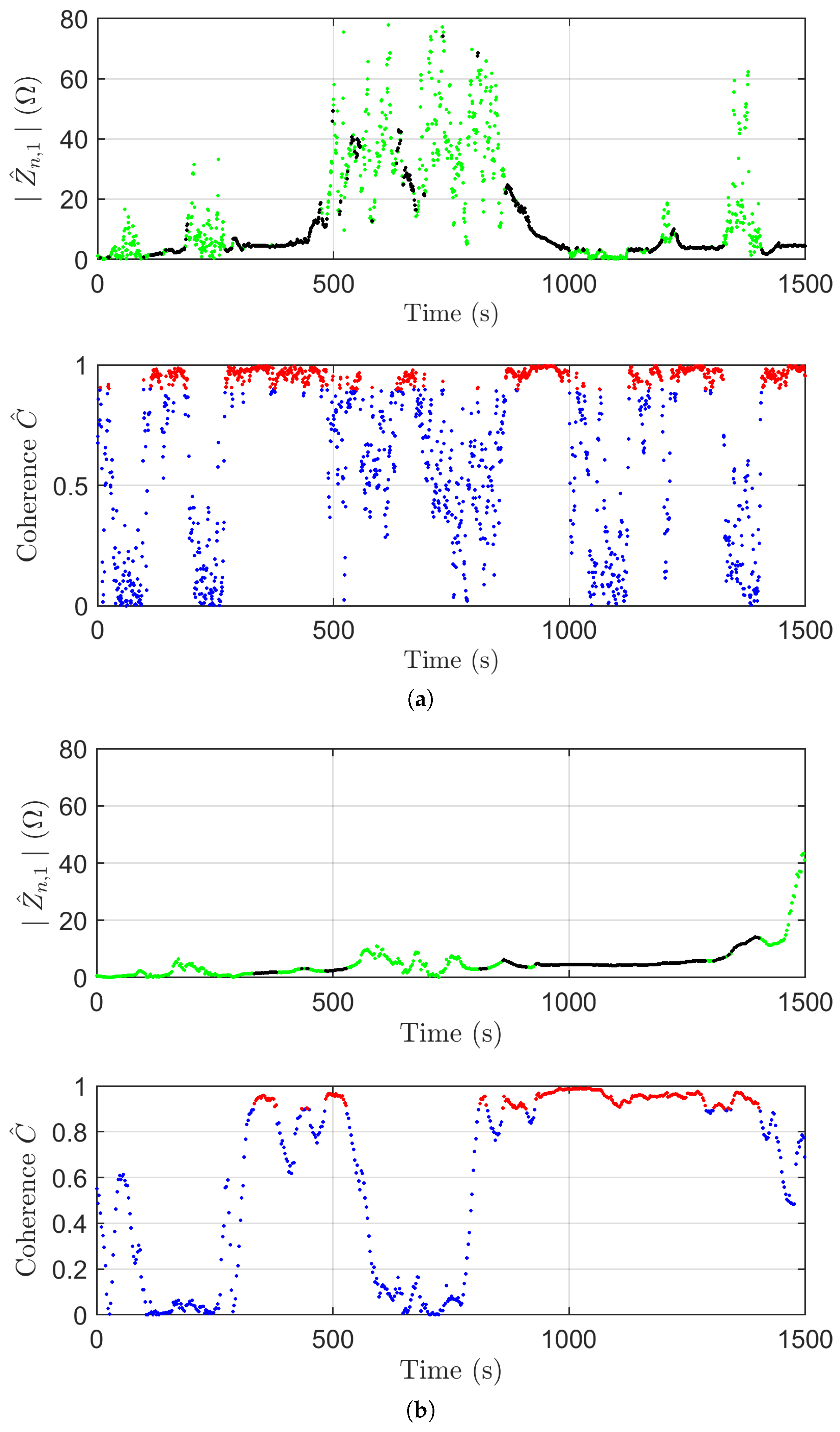
5.5. Line Impedance Estimate Using Auto- and Cross-Spectrum
6. Conclusions
- A multi-frequency perspective, extending beyond the fundamental, including the most relevant harmonic components, considering the approach in [66];
- Exploiting calculations on adjacent frequency bins, which, by imposing the continuity and smooth behavior of the real system, improve the consistency of the estimate;
- Exploring alternative methods, such as the Gaussian mixture regression in [66], or improving the present methods, making the LMS and ACS part of a more complex estimation process that, for example, exploits intervals at low or zero current, as in [14], or improving the convergence using adaptive techniques, as in [68].
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Boschetti, G.; Mariscotti, A. Integrated electromechanical simulation of traction systems: Relevant factors for the analysis and estimation of energy efficiency. In Proceedings of the 2012 Electrical Systems for Aircraft, Railway and Ship Propulsion, Bologna, Italy, 16–18 October 2012. [Google Scholar] [CrossRef]
- Wang, K.; Hu, H.; Chen, J.; Zhu, J.; Zhong, X.; He, Z. System-Level Dynamic Energy Consumption Evaluation for High-Speed Railway. IEEE Trans. Transp. Electrif. 2019, 5, 745–757. [Google Scholar] [CrossRef]
- Lin, J.; Song, J.; Lu, C. Synchrophasor Data Analytics: Transmission Line Parameters Online Estimation for Energy Management. IEEE Trans. Eng. Manag. 2022, 69, 671–681. [Google Scholar] [CrossRef]
- Bhagat, S.; Bongiorno, J.; Mariscotti, A. Influence of Infrastructure and Operating Conditions on Energy Performance of DC Transit Systems. Energies 2023, 16, 3975. [Google Scholar] [CrossRef]
- Huang, W.; Nengling, T.; Zheng, X.; Fan, C.; Yang, X.; Kirby, B.J. An Impedance Protection Scheme for Feeders of Active Distribution Networks. IEEE Trans. Power Deliv. 2014, 29, 1591–1602. [Google Scholar] [CrossRef]
- Sivanagaraju, G.; Chakrabarti, S.; Srivastava, S.C. Uncertainty in Transmission Line Parameters: Estimation and Impact on Line Current Differential Protection. IEEE Trans. Instrum. Meas. 2014, 63, 1496–1504. [Google Scholar] [CrossRef]
- Mariscotti, A. Impact of rail impedance intrinsic variability on railway system operation, EMC and safety. Int. J. Electr. Comput. Eng. (IJECE) 2021, 11, 17. [Google Scholar] [CrossRef]
- Mariscotti, A.; Sandrolini, L. Detection of Harmonic Overvoltage and Resonance in AC Railways Using Measured Pantograph Electrical Quantities. Energies 2021, 14, 5645. [Google Scholar] [CrossRef]
- Bhagat, S.; Mariscotti, A. Interference with Signaling Track Circuits Caused by Rolling Stock: Uncertainty and Variability on a Test Case. Electronics 2024, 13, 2875. [Google Scholar] [CrossRef]
- Dommel, H.W. Overhead Line Parameters from Handbook Formulas and Computer Programs. IEEE Power Eng. Rev. 1985, PER-5, 38. [Google Scholar] [CrossRef]
- Lucca, G. Per unit length parameters of a multiconductor line with earth return inside a tunnel. IEEE Trans. Electromagn. Compat. 2000, 42, 6–15. [Google Scholar] [CrossRef]
- Deleanu, S.; Carpenter, D.C. A Study on Determination of Electrical Impedance and Frequency Characteristics of a Subway System Using Finite Element Analysis. In Proceedings of the 2013 Joint Rail Conference, Knoxville, TN, USA, 15–18 April 2013. JRC2013. [Google Scholar] [CrossRef]
- Wu, M. Physical Interpretation of Impedance Formulas for Conductors Enclosed in a Cylindrical Tunnel. IEEE Trans. Power Deliv. 2011, 26, 1354–1360. [Google Scholar] [CrossRef]
- Ciobotaru, M.; Agelidis, V.; Teodorescu, R. Line impedance estimation using model based identification technique. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011. [Google Scholar]
- Hoffmann, N.; Fuchs, F.W. Minimal Invasive Equivalent Grid Impedance Estimation in Inductive—Resistive Power Networks Using Extended Kalman Filter. IEEE Trans. Power Electron. 2014, 29, 631–641. [Google Scholar] [CrossRef]
- Borkowski, D. A new method for noninvasive measurement of grid harmonic impedance with data selection: Method for Noninvasive Measurement. Int. Trans. Electr. Energy Syst. 2015, 25, 3772–3791. [Google Scholar] [CrossRef]
- Fernández, I.; Gallarreta, A.; González-Ramos, J.; Wright, P.; de la Vega, D.; Angulo, I.; Arrinda, A. Measurement System of the Mean and Sub-Cycle LV Grid Access Impedance From 20 kHz To 10 MHz. IEEE Trans. Power Deliv. 2023, 38, 2204–2212. [Google Scholar] [CrossRef]
- Tang, J.; Xu, J.; Qian, J.; Chen, Z.; Yin, J.; Gao, Y.; Hu, Z. A precise measurement method for positive sequence parameters of EHV and UHV transmission lines and its application. In Proceedings of the 2011 IEEE Power Engineering and Automation Conference, Wuhan, China, 8–9 September 2011. [Google Scholar] [CrossRef]
- Kurokawa, S.; Asti, G.A.; Costa, E.C.M.; Pissolato, J. Simplified procedure to estimate the resistance parameters of transmission lines. Electr. Eng. 2012, 95, 221–227. [Google Scholar] [CrossRef]
- IEEE Std. 1870; IEEE Approved Draft Guide for the Parameter Measurement of AC Transmission Line. IEEE: Piscataway, NJ, USA, 2019.
- Cecchi, V.; Leger, A.S.; Miu, K.; Nwankpa, C.O. Incorporating Temperature Variations Into Transmission-Line Models. IEEE Trans. Power Deliv. 2011, 26, 2189–2196. [Google Scholar] [CrossRef]
- Naranpanawe, L.; Ma, H.; Saha, T. Overhead Conductor Condition Monitoring. 2018. Available online: https://www.energynetworks.com.au/news/conductor-condition-monitoring-milestone-1-report/ (accessed on 16 June 2024).
- Afia, R.S.A.; Mustafa, E.; Tamus, Z.A. Aging Mechanisms and Non-Destructive Aging Indicators of XLPE/CSPE Unshielded LV Nuclear Power Cables Subjected to Simultaneous Radiation-Mechanical Aging. Polymers 2021, 13, 3033. [Google Scholar] [CrossRef]
- Yang, J.; Li, W.; Chen, T.; Xu, W.; Wu, M. Online estimation and application of power grid impedance matrices based on synchronised phasor measurements. IET Gener. Transm. Distrib. 2010, 4, 1052. [Google Scholar] [CrossRef]
- Asprou, M.; Kyriakides, E.; Albu, M.M. Uncertainty Bounds of Transmission Line Parameters Estimated From Synchronized Measurements. IEEE Trans. Instrum. Meas. 2019, 68, 2808–2818. [Google Scholar] [CrossRef]
- Ćwil, M.; Bartnik, W.; Jarzębowski, S. Railway Vehicle Energy Efficiency as a Key Factor in Creating Sustainable Transportation Systems. Energies 2021, 14, 5211. [Google Scholar] [CrossRef]
- Alonso, L.M.; Roux, L.D.; Taunay, L.; Watare, A.; Saudemont, C.; Robyns, B. Energy Metering Data Estimation and Validation in Railways. IEEE Trans. Power Deliv. 2022, 37, 4326–4334. [Google Scholar] [CrossRef]
- Mariscotti, A. Results on the Power Quality of French and Italian 2 × 25 kV 50 Hz railways. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Gao, S.; Li, X.; Ma, X.; Hu, H.; He, Z.; Yang, J. Measurement-Based Compartmental Modeling of Harmonic Sources in Traction Power-Supply System. IEEE Trans. Power Deliv. 2017, 32, 900–909. [Google Scholar] [CrossRef]
- Kaleybar, H.J.; Brenna, M.; Foiadelli, F.; Fazel, S.S.; Zaninelli, D. Power Quality Phenomena in Electric Railway Power Supply Systems: An Exhaustive Framework and Classification. Energies 2020, 13, 6662. [Google Scholar] [CrossRef]
- EN 50463-2; Railway Applications—Energy Measurement on Board Trains. CENELEC: Brussels, Belgium, 2017.
- Giordano, D.; Clarkson, P.; Gamacho, F.; van den Brom, H.; Donadio, L.; Fernandez-Cardador, A.; Spalvieri, C.; Gallo, D.; Istrate, D.; De Santiago Laporte, A.; et al. Accurate Measurements of Energy, Efficiency and Power Quality in the Electric Railway System. In Proceedings of the 2018 Conference on Precision Electromagnetic Measurements (CPEM 2018), Paris, France, 8–13 July 2018. [Google Scholar] [CrossRef]
- Mariscotti, A. Data sets of measured pantograph voltage and current of European AC railways. Data Brief 2020, 30, 105477. [Google Scholar] [CrossRef]
- Monteiro, H.L.; Duque, C.A.; Silva, L.R.; Meyer, J.; Stiegler, R.; Testa, A.; Ribeiro, P.F. Harmonic impedance measurement based on short time current injections. Electr. Power Syst. Res. 2017, 148, 108–116. [Google Scholar] [CrossRef]
- Hu, H.; Pan, P.; Song, Y.; He, Z. A Novel Controlled Frequency Band Impedance Measurement Approach for Single-Phase Railway Traction Power System. IEEE Trans. Ind. Electron. 2020, 67, 244–253. [Google Scholar] [CrossRef]
- Ritzmann, D.; Wright, P.S.; Holderbaum, W.; Potter, B. A Method for Accurate Transmission Line Impedance Parameter Estimation. IEEE Trans. Instrum. Meas. 2016, 65, 2204–2213. [Google Scholar] [CrossRef]
- Costa, E.C.M.; Kurokawa, S. Estimation of transmission line parameters using multiple methods. IET Gener. Transm. Distrib. 2015, 9, 2617–2624. [Google Scholar] [CrossRef]
- Lin, Y.; Abur, A. A New Framework for Detection and Identification of Network Parameter Errors. IEEE Trans. Smart Grid 2018, 9, 1698–1706. [Google Scholar] [CrossRef]
- Kodaira, D.; Park, J.; Kim, S.; Han, S.; Han, S. Impedance Estimation with an Enhanced Particle Swarm Optimization for Low-Voltage Distribution Networks. Energies 2019, 12, 1167. [Google Scholar] [CrossRef]
- Song, K.; Mingli, W.; Yang, S.; Liu, Q.; Agelidis, V.G.; Konstantinou, G. High-Order Harmonic Resonances in Traction Power Supplies: A Review Based on Railway Operational Data, Measurements, and Experience. IEEE Trans. Power Electron. 2020, 35, 2501–2518. [Google Scholar] [CrossRef]
- Ferrari, P.; Mariscotti, A.; Pozzobon, P. Reference curves of the pantograph impedance in DC railway systems. In Proceedings of the IEEE International Symposium on Circuits and Systems, Geneva, Switzerland, 28–31 May 2000. [Google Scholar] [CrossRef]
- Holtz, J.; Kelin, H.J. The propagation of harmonic currents generated by inverter-fed locomotives in the distributed overhead supply system. IEEE Trans. Power Electron. 1989, 4, 168–174. [Google Scholar] [CrossRef]
- Mariscotti, A.; Giordano, D.; Femine, A.D.; Signorino, D. Filter Transients onboard DC Rolling Stock and Exploitation for the Estimate of the Line Impedance. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020. [Google Scholar] [CrossRef]
- Seferi, Y.; Blair, S.M.; Mester, C.; Stewart, B.G. A Novel Arc Detection Method for DC Railway Systems. Energies 2021, 14, 444. [Google Scholar] [CrossRef]
- Zhai, Y.; Liu, Q.; Wu, M.; Li, J. Influence of the Power Source on the Impedance-Frequency Estimation of the 2 × 25 kV Electrified Railway. IEEE Access 2020, 8, 71685–71693. [Google Scholar] [CrossRef]
- He, F.G.; Li, C.Y.; Zhang, H.Y.; Ai, L.; Hu, H.T. Parallel Harmonic Resonance Probability Identification of Traction Power Supply System Based on Measured Data. Dianwang Jishu/Power Syst. Technol. 2024, 48, 2084–2094. [Google Scholar] [CrossRef]
- Laury, J. Stability of Low-Frequency AC Railways—Models and Transient Stability. 2019. Available online: https://www.diva-portal.org/smash/get/diva2:1270596/FULLTEXT01.pdf (accessed on 16 June 2024).
- Cobreces, S.; Bueno, E.; Pizarro, D.; Rodriguez, F.; Huerta, F. Grid Impedance Monitoring System for Distributed Power Generation Electronic Interfaces. IEEE Trans. Instrum. Meas. 2009, 58, 3112–3121. [Google Scholar] [CrossRef]
- Mariscotti, A. Impact of Harmonic Power Terms on the Energy Measurement in AC Railways. IEEE Trans. Instrum. Meas. 2020, 69, 6731–6738. [Google Scholar] [CrossRef]
- Langella, R.; Testa, A. A New Method for Statistical Assessment of the System Harmonic Impedance and of the Background Voltage Distortion. In Proceedings of the 2006 International Conference on Probabilistic Methods Applied to Power Systems, Stockholm, Sweden, 11–15 June 2006. [Google Scholar] [CrossRef]
- Borkowski, D. Power system impedance tracking using sliding, finite memory complex recursive least squares. In Proceedings of the Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA), Poznan, Poland, 26–28 September 2013. [Google Scholar]
- Arefifar, S.A.; Xu, W. Online Tracking of Power System Impedance Parameters and Field Experiences. IEEE Trans. Power Deliv. 2009, 24, 1781–1788. [Google Scholar] [CrossRef]
- Bendat, J.S.; Piersol, A.G. Random Data: Analysis and Measurement Procedures, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Piret, H.; Granjon, P.; Cattin, V.; Guillet, N. Online Estimation of Electrical Impedance. In Proceedings of the 7th International Workshop on Impedance Spectroscopy (IWIS 2014), Chemnitz, Germany, 24–26 September 2014. [Google Scholar]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Pintelon, R.; Schukens, J. System Identification: A Frequency Domain Approach; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Borkowski, D.; Wetula, A.; Kowalski, J. Uncertainty estimation in noninvasive measurement of harmonic impedance—Laboratory studies. In Proceedings of the 2015 International School on Nonsinusoidal Currents and Compensation (ISNCC), Lagow, Poland, 15–18 June 2015. [Google Scholar] [CrossRef]
- Bartlett, M.S. Smoothing Periodograms from Time-Series with Continuous Spectra. Nature 1948, 161, 686–687. [Google Scholar] [CrossRef]
- Mariscotti, A. Direct Measurement of Power Quality Over Railway Networks with Results of a 16.7-Hz Network. IEEE Trans. Instrum. Meas. 2011, 60, 1604–1612. [Google Scholar] [CrossRef]
- Salles, R.S.; de Oliveira, R.A.; Ronnberg, S.K.; Mariscotti, A. Analytics of Waveform Distortion Variations in Railway Pantograph Measurements by Deep Learning. IEEE Trans. Instrum. Meas. 2022, 71, 2516211. [Google Scholar] [CrossRef]
- Salles, R.S.; Rönnberg, S.K. Review of Waveform Distortion Interactions Assessment in Railway Power Systems. Energies 2023, 16, 5411. [Google Scholar] [CrossRef]
- Bahrani, B.; Rufer, A.; Aeberhard, M. Railway catenary parameters identification based on harmonic current injection. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011. [Google Scholar]
- Pan, P.; Hu, H.; Yang, X.; Blaabjerg, F.; Wang, X.; He, Z. Impedance Measurement of Traction Network and Electric Train for Stability Analysis in High-Speed Railways. IEEE Trans. Power Electron. 2018, 33, 10086–10100. [Google Scholar] [CrossRef]
- EN 50388-1; Railway Applications—Fixed Installationsand Rolling Stock—Technical Criteria for the Coordination between Electric Traction Power Supply Systems and Rolling Stock to Achieve Interoperability. CENELEC: Brussels, Belgium, 2022.
- EN 50641; Railway Applications—Fixed Installations—Requirements for the Validation of Simulation Tools Used for the Design of Electric Traction Power Supply Systems. CENELEC: Brussels, Belgium, 2020.
- Xia, Y.; Tang, W. Study on Harmonic Impedance Estimation Based on Gaussian Mixture Regression Using Railway Power Supply Loads. Energies 2022, 15, 6952. [Google Scholar] [CrossRef]
- Borkowski, J.; Kania, D.; Mroczka, J. Comparison of sine-wave frequency estimation methods in respect of speed and accuracy for a few observed cycles distorted by noise and harmonics. Metrol. Meas. Syst. 2018, 25. [Google Scholar] [CrossRef]
- Li, M.; Zhang, Y.; Hu, Z.; Zhang, Y.; Zhang, J. A Battery SOC Estimation Method Based on AFFRLS-EKF. Sensors 2021, 21, 5698. [Google Scholar] [CrossRef]
- e-TRENY. Metrology Support for Enhanced Energy Efficiency in DC Transportation Systems. Available online: https://e-treny.eu (accessed on 16 June 2024).
- Giordano, D.; Fernandez, J.Q.; Gallo, D.; Hällström, J.; Istrate, D.; Jordache, M.; Mariscotti, A.; Rietveld, G.; Rovira, J.; Venugopal, P.; et al. Metrology Support for Enhanced Energy Efficiency in DC Transportation Systems. In Proceedings of the Conference on Precision Electromagnetic Measurements, Denver, CO, USA, 8–12 July 2024. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mariscotti, A. Estimation of Railway Line Impedance at Low Frequency Using Onboard Measurements Only. Energies 2024, 17, 3739. https://doi.org/10.3390/en17153739
Mariscotti A. Estimation of Railway Line Impedance at Low Frequency Using Onboard Measurements Only. Energies. 2024; 17(15):3739. https://doi.org/10.3390/en17153739
Chicago/Turabian StyleMariscotti, Andrea. 2024. "Estimation of Railway Line Impedance at Low Frequency Using Onboard Measurements Only" Energies 17, no. 15: 3739. https://doi.org/10.3390/en17153739
APA StyleMariscotti, A. (2024). Estimation of Railway Line Impedance at Low Frequency Using Onboard Measurements Only. Energies, 17(15), 3739. https://doi.org/10.3390/en17153739