

Multivariable Control-Based dq Decoupling in Voltage and Current Control Loops for Enhanced Transient Response and Power Delivery in Microgrids

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Mathematical Model of VSI and MPZC Description
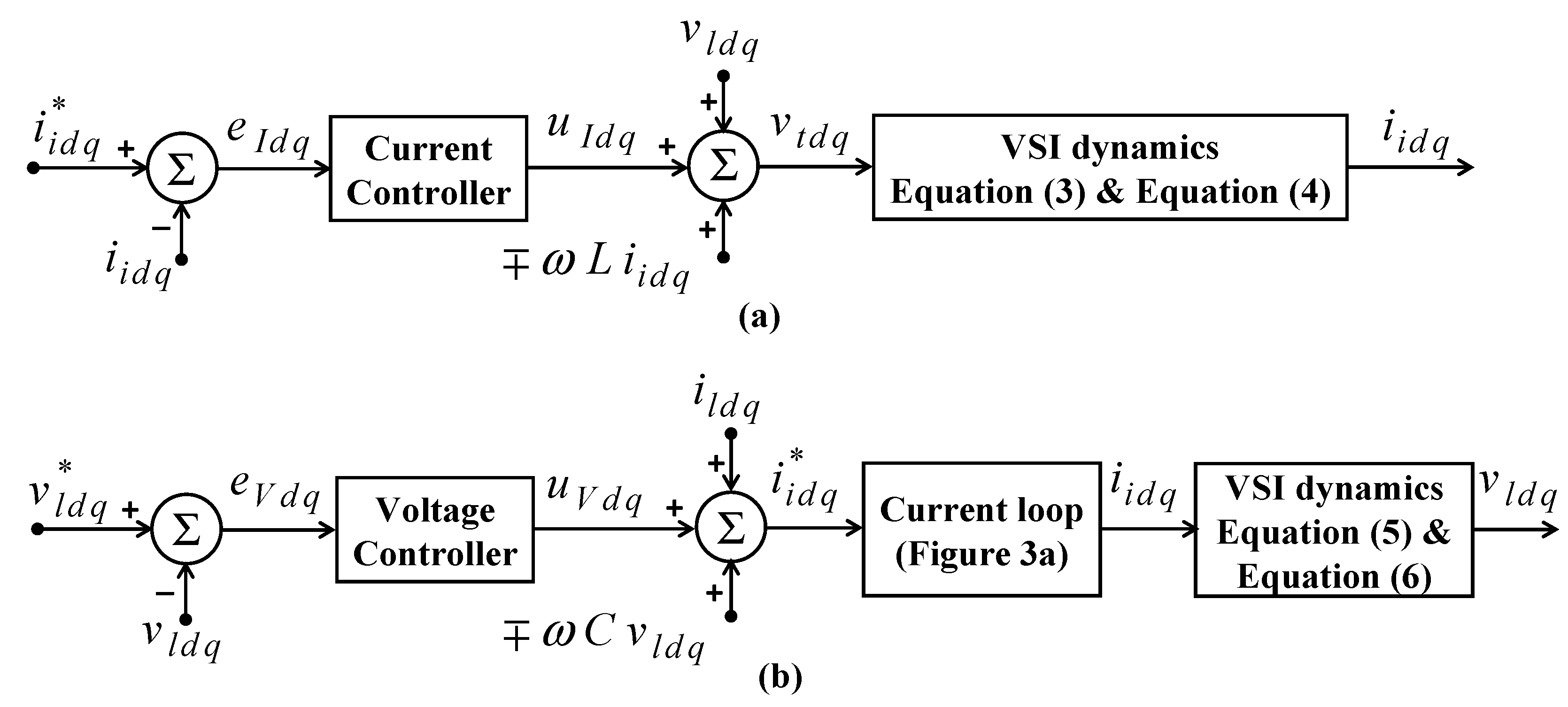
2.1. Mathematical Model of VSI
2.2. MPZC Description
3. Proposed Methodology: Overview and Implementation
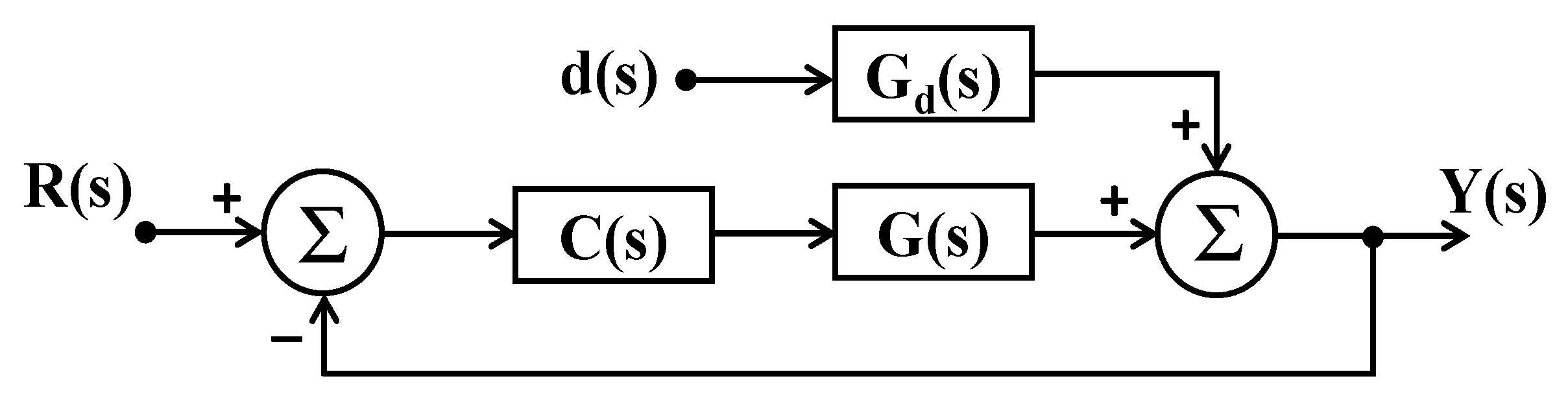
3.1. Overview of Direct Synthesis Method
3.2. IMC Model Design Based on Direct Synthesis
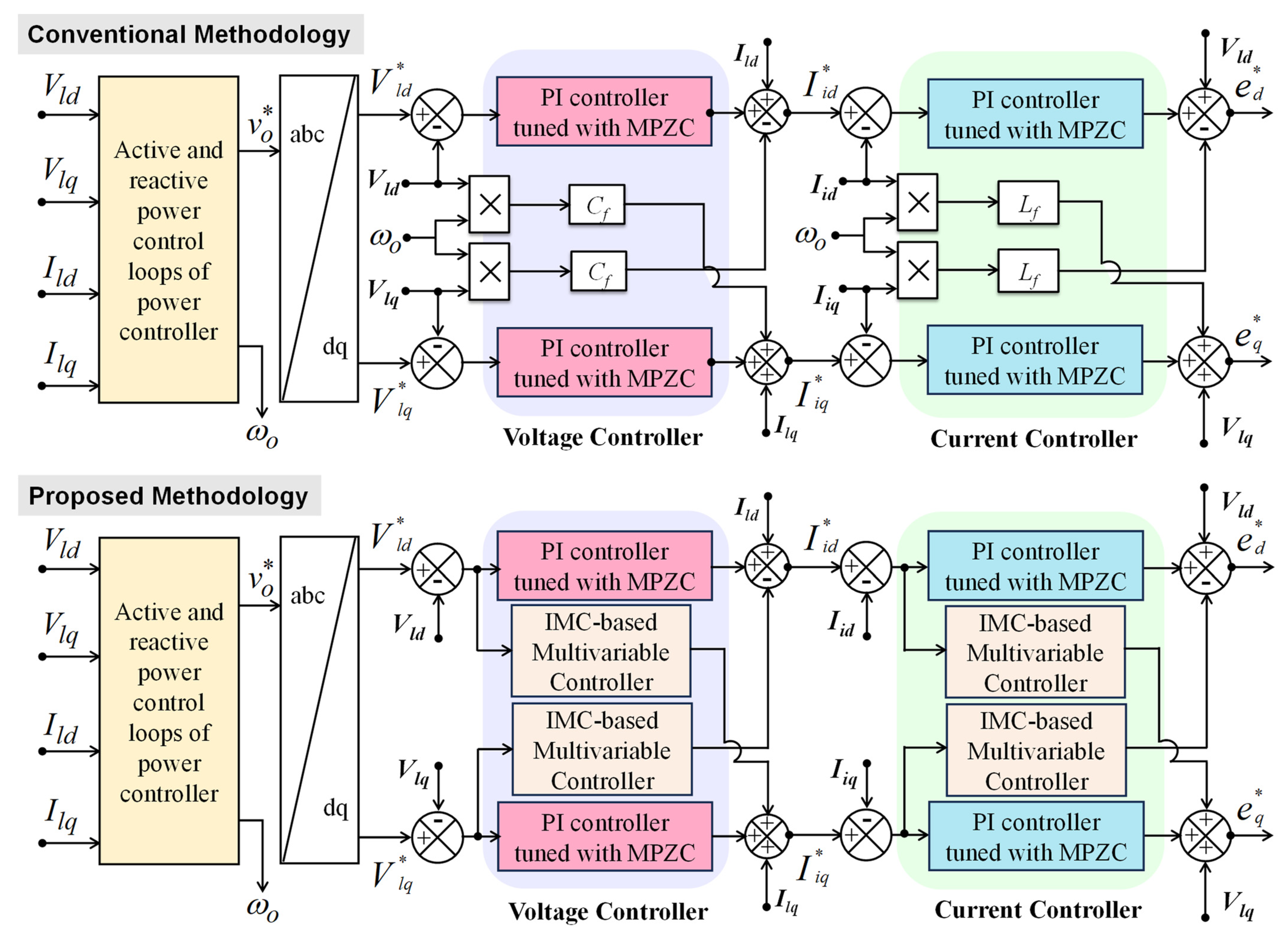
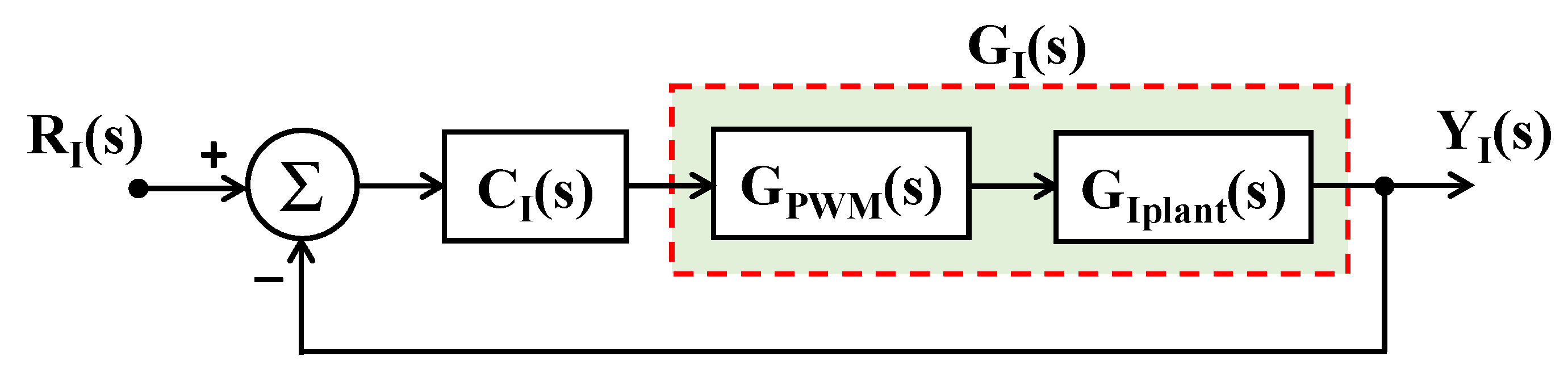
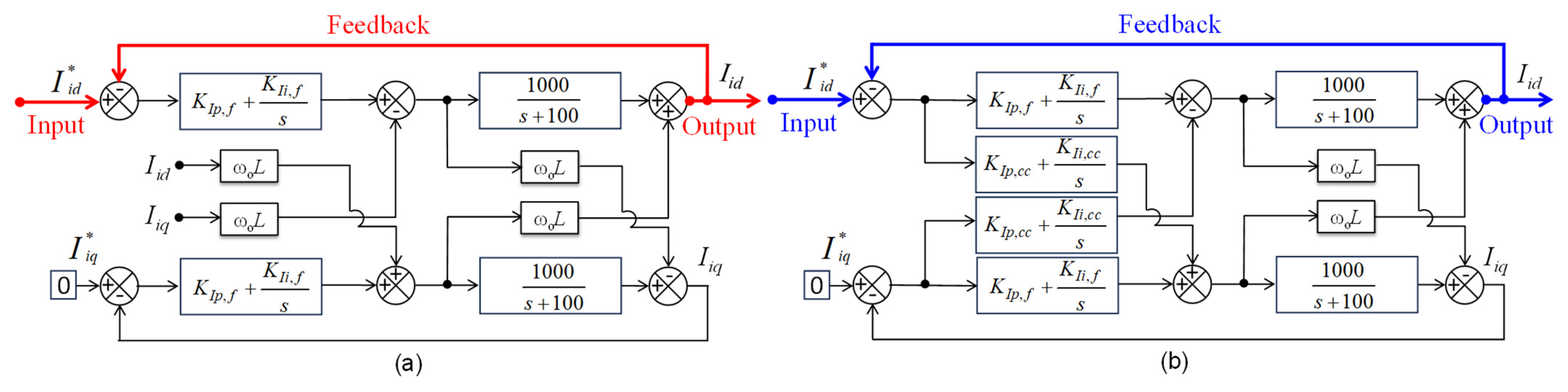
3.3. Multivariable Inner CCL Design for VSI
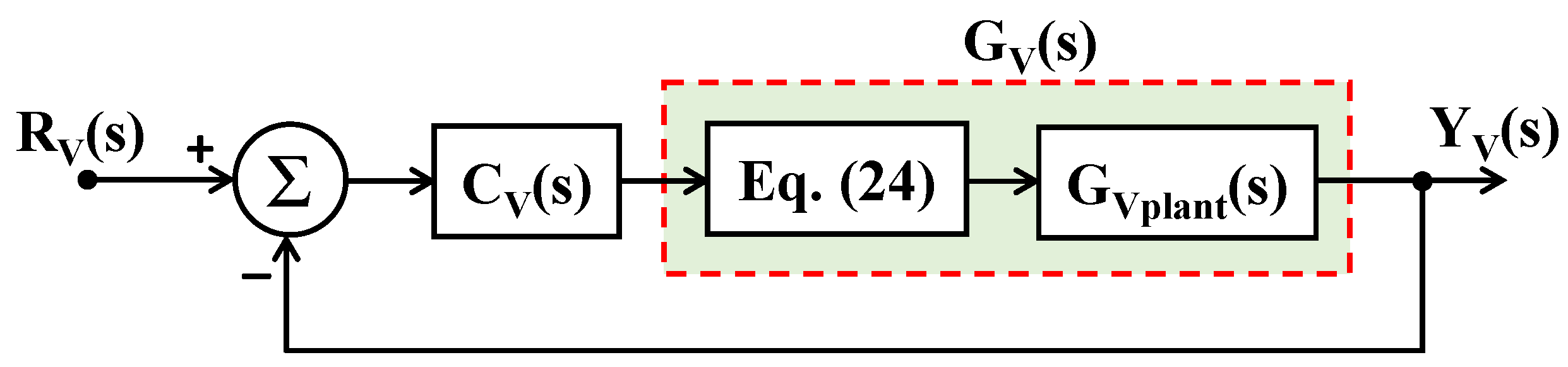
3.4. Multivariable Outer VCL Design for VSI
3.5. Rationale of Proposed HMPZC
4. Simulation Results and Discussion
4.1. Results and Discussion Corresponding to Test Case T1
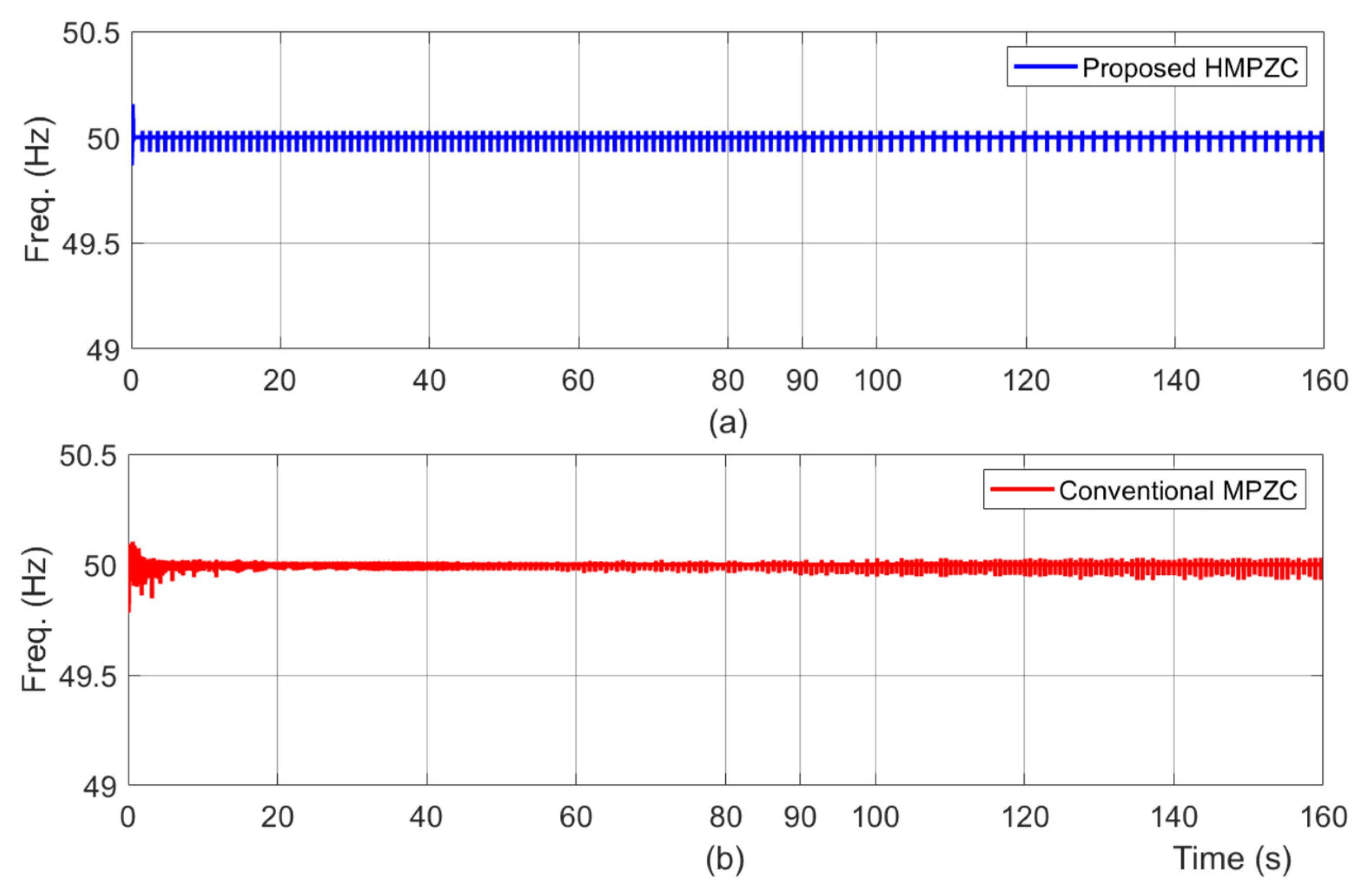
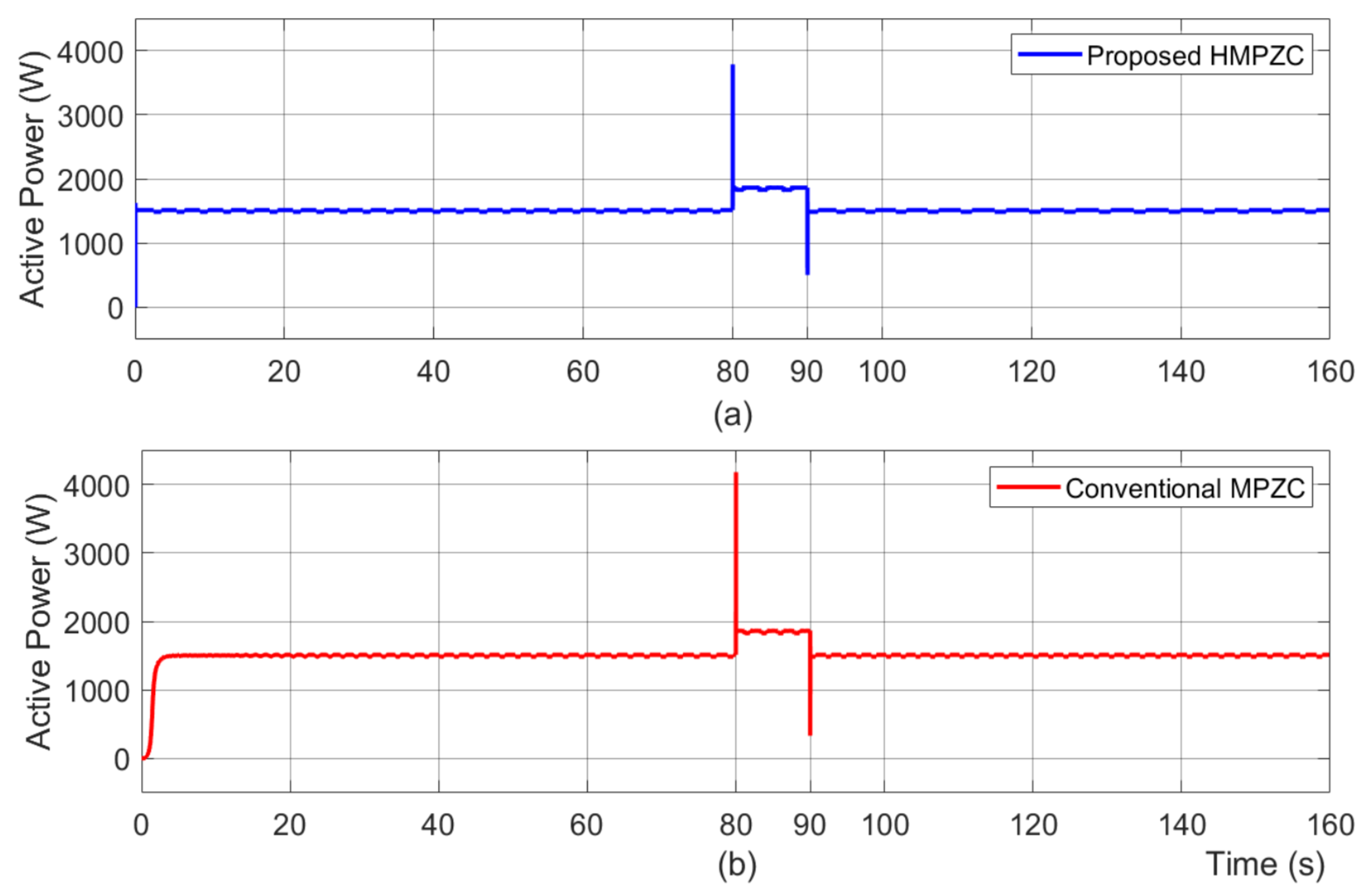
4.2. Results and Discussion Corresponding to Test Case T2
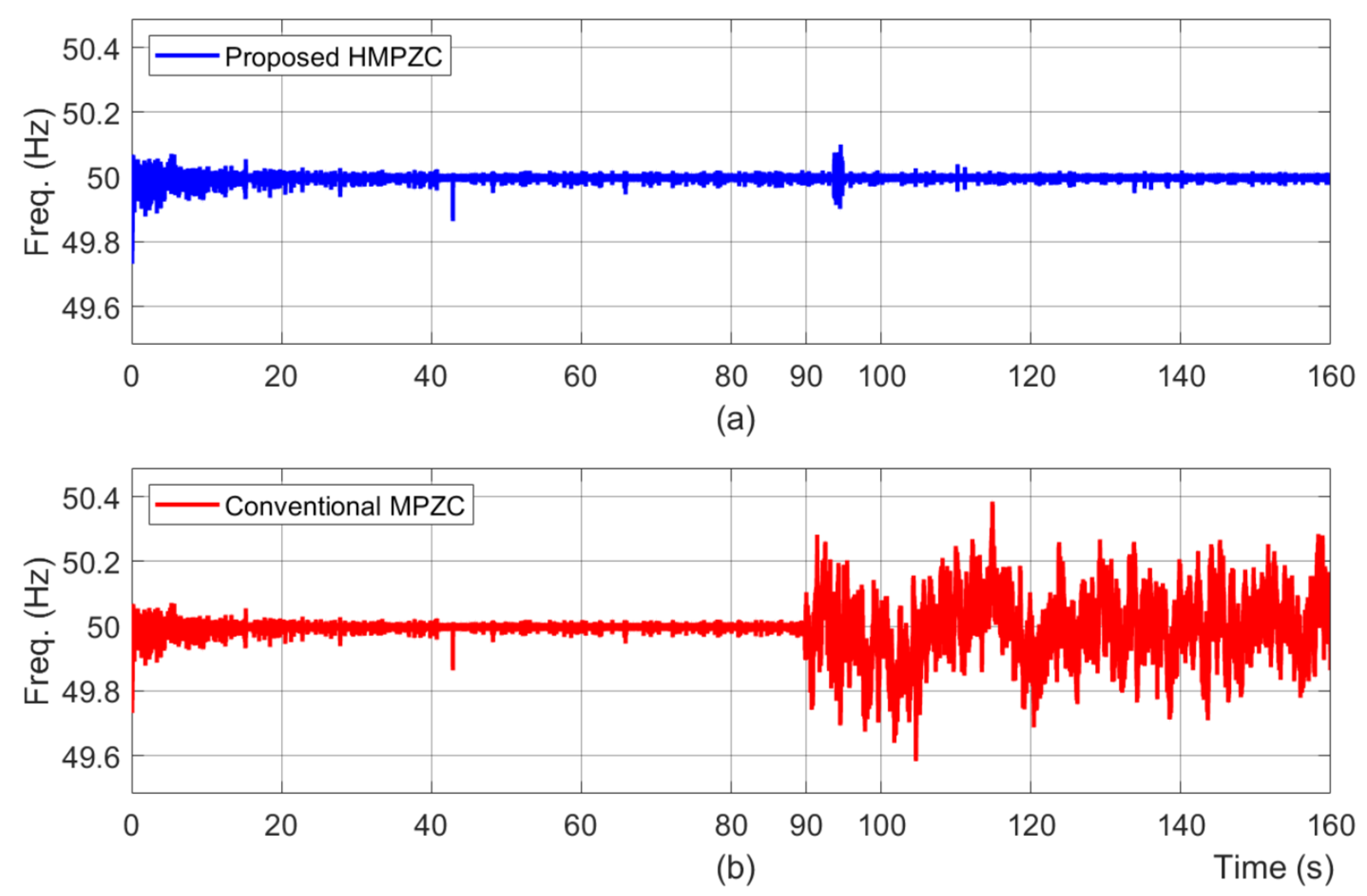
4.3. Results and Discussion Corresponding to Test Case T3
4.4. Summary of Discussions
- The highlighted values in the table specify an intolerable deviation regarding their characteristics.
- From the frequency characteristics, a small deviation in overshoot or undershoot is the desired criterion to verify an improvement in transient response.
- From the power characteristics, “stable” in the stability criteria is the desired outcome to verify power delivery capability.
- From the power characteristics, a smaller value in extra burden is used to verify a reduction in dq coupling.
- From the voltage characteristics, the THD value is used to verify transient response improvement. “NC” in the same characteristics indicates not considered.
5. Conclusions
- The overshoot seen in the active power is 1308 W with the HMPZC method and 1529 W with the conventional MPZC method. This confirms that a reduced coupling is achieved with the proposed HMPZC method.
- An improvement in transient response cannot be inferred, because the deviation in frequency is the same, and the voltage THD values are less than 5% with both methods.
- As both methods ensured system stability, an improvement in power delivery capability cannot be inferred.
- The overshoot seen in the active power is 1914 W with the HMPZC method and 2307 W with the conventional MPZC method. This confirms that a reduced coupling is achieved with the proposed HMPZC method.
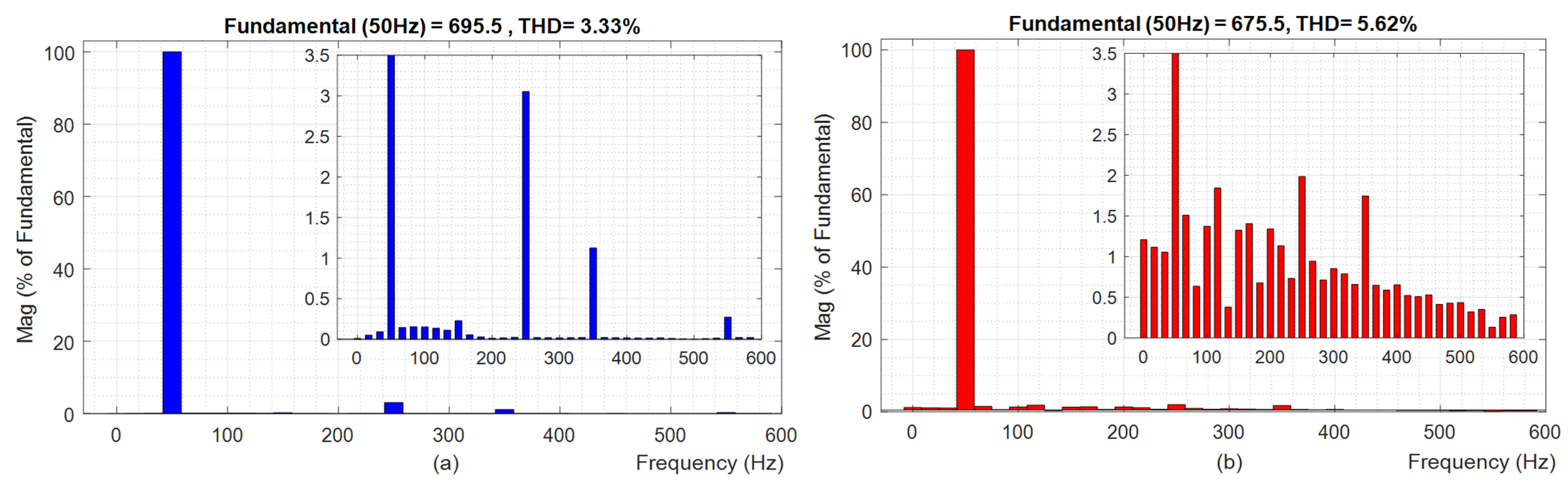
- The voltage THD with the HMPZC and MPZC methods is 3.33% and 5.62%. Unlike T1, the THD results confirm the ability of the proposed HMPZC method to improve the transient response.
- Similar to T1 in this test case also, an improvement in power delivery capability cannot be inferred, as both methods maintained the stability of the system.
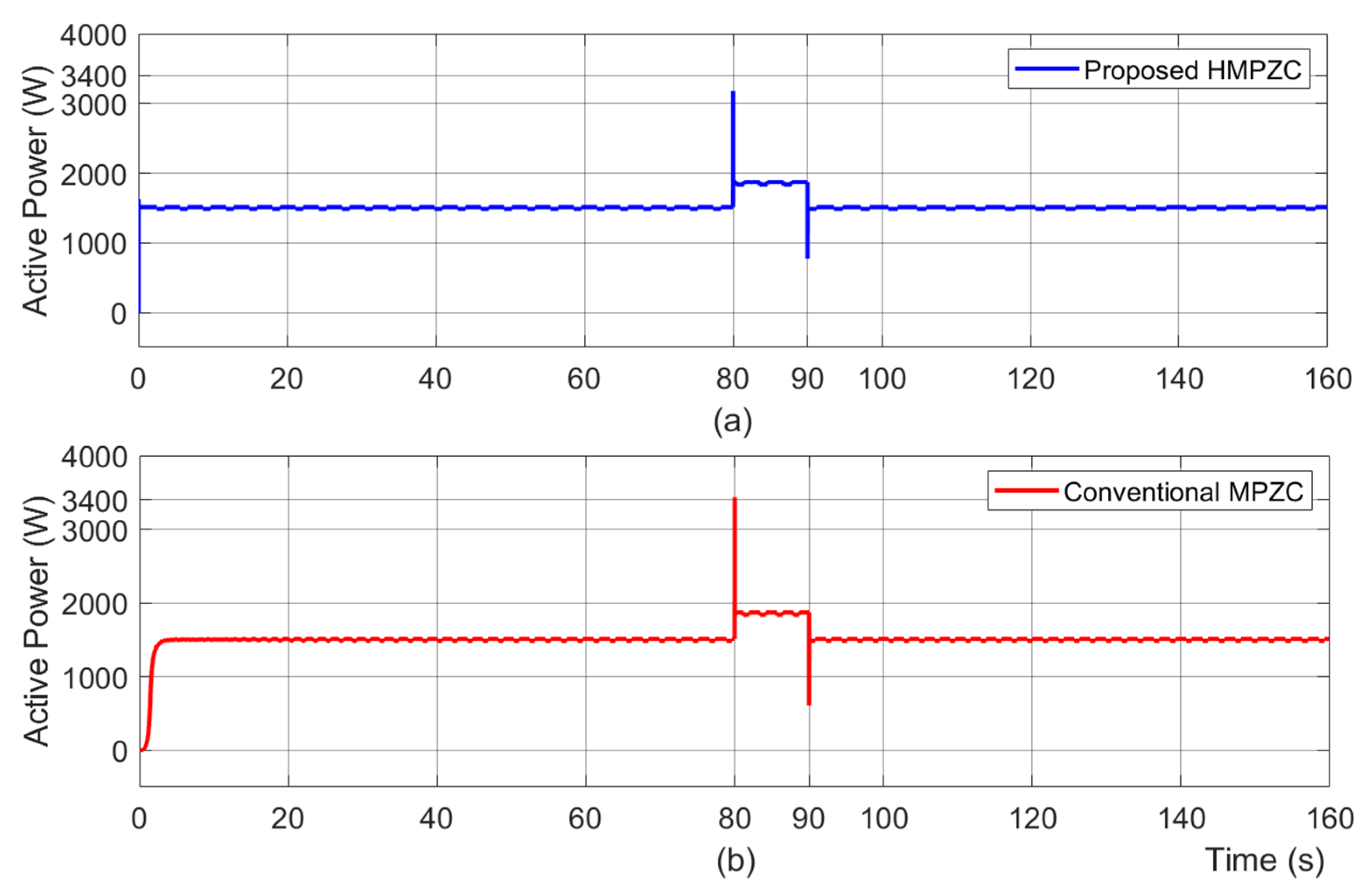
- The overshoot seen in the active power is 4751 W with the HMPZC method and 6083 W with the conventional MPZC method. This confirms that a reduced coupling is achieved with the proposed HMPZC method.
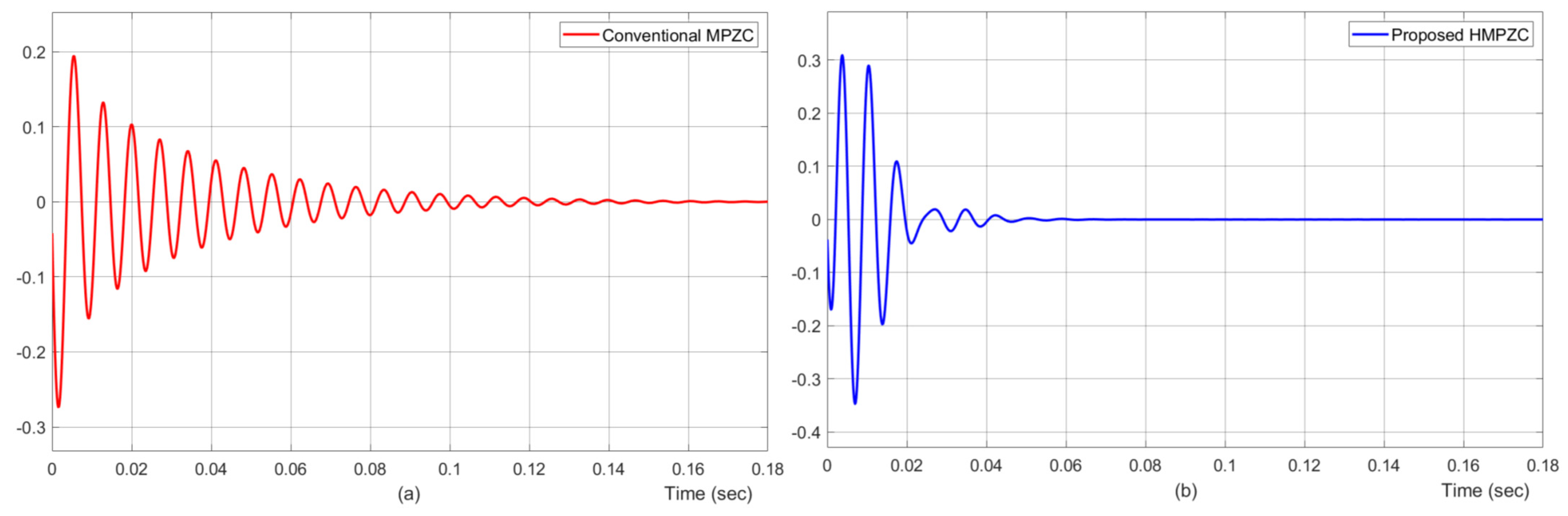
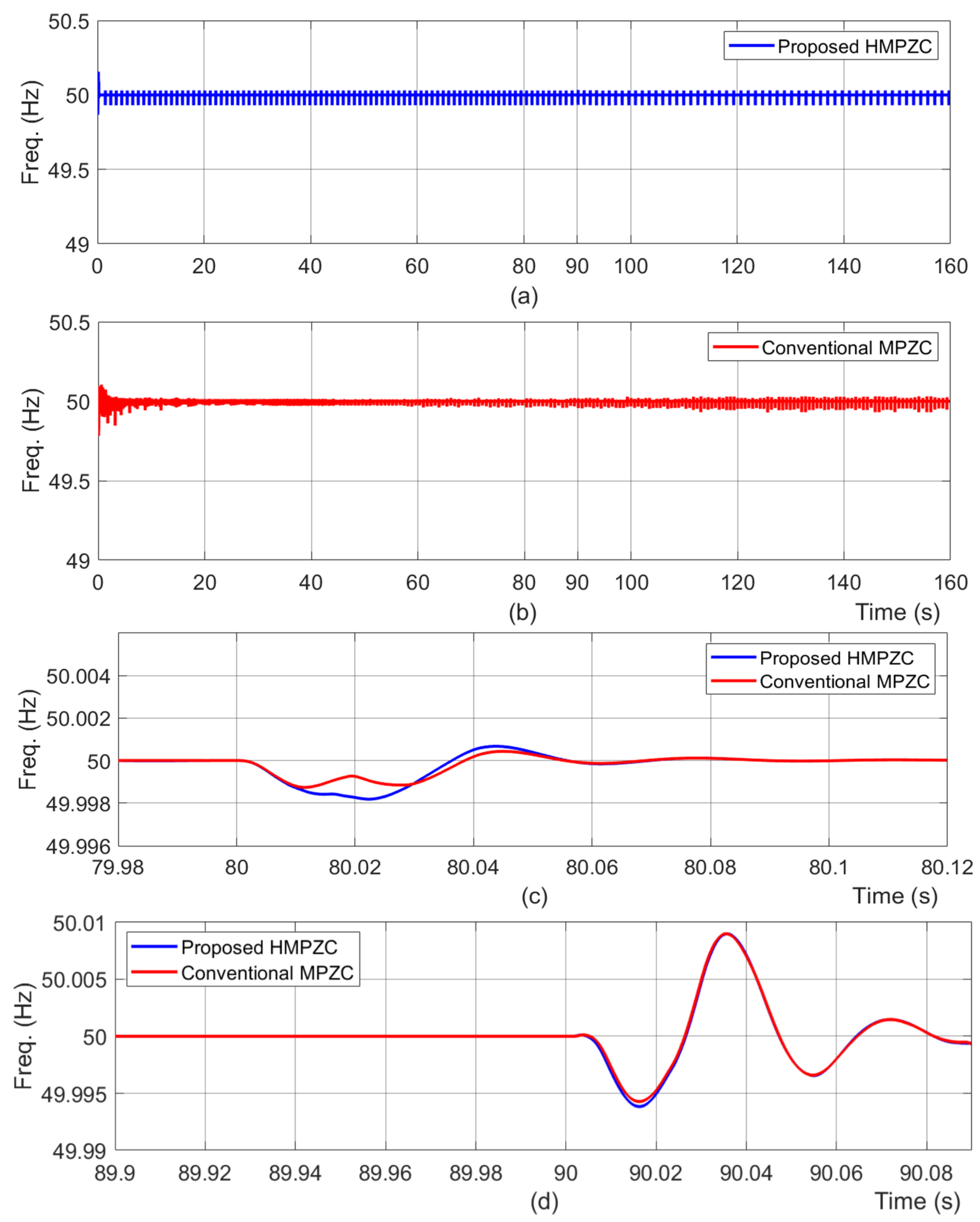
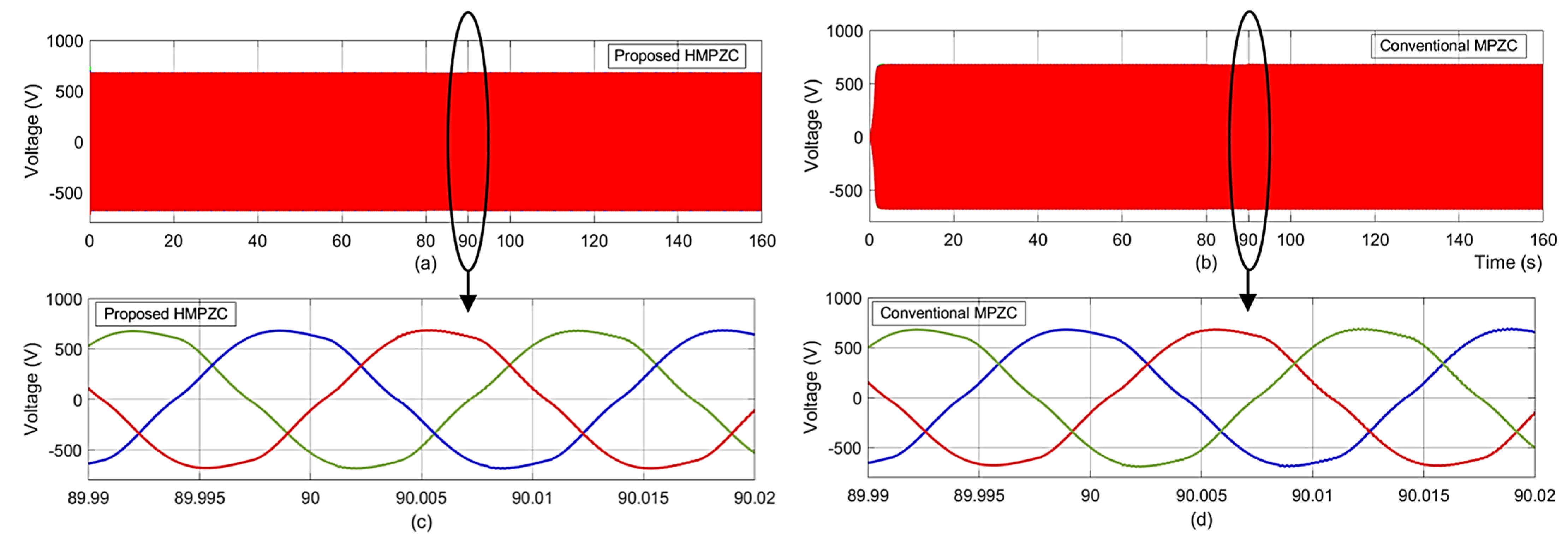
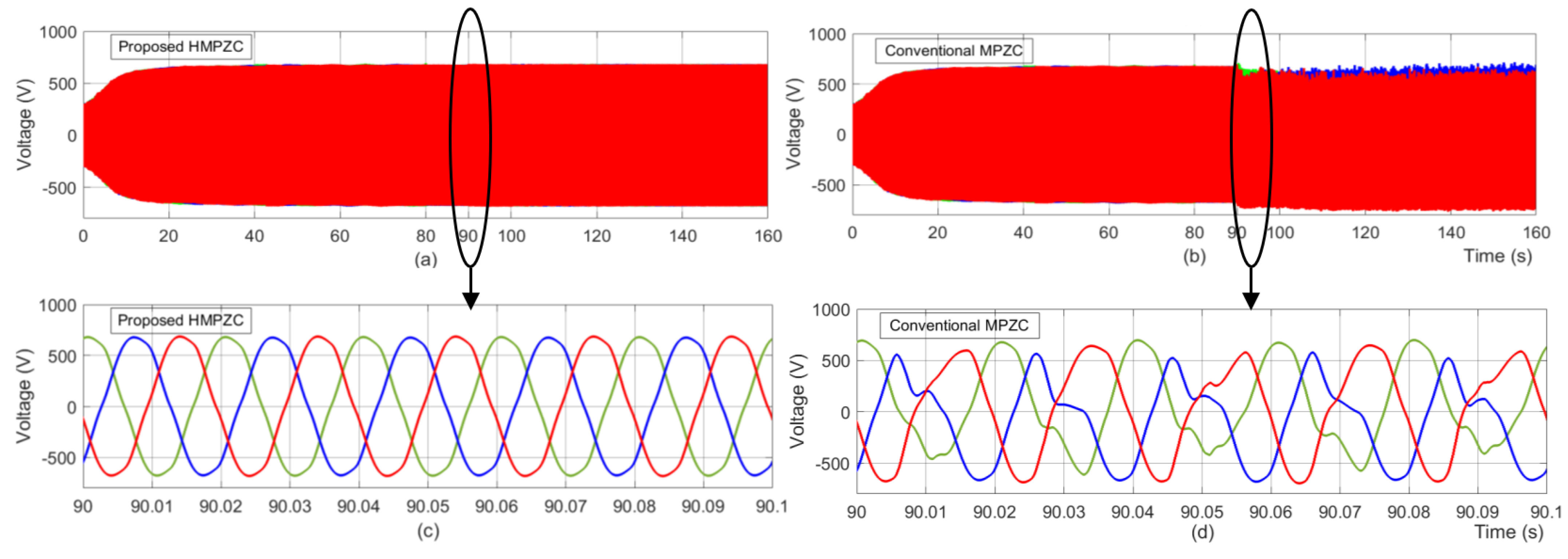
- The maximum deviations during overshoot and undershoot with the HMZC method are 0.025 Hz and 0.017 Hz, respectively. On the other hand, the maximum deviation during overshoot and undershoot with the MPZC method is 0.4 Hz. The voltage THD with the HMPZC and MPZC methods are 3.39% and 20.2%, respectively. Thus, based on the frequency and voltage results, the ability of the proposed HMPZC method to improve the transient response is confirmed.
- From the power, frequency, and voltage characteristics, it is identified that stability is maintained with the HMPZ method, whereas MPZC failed to maintain stability. Unlike T2, this analysis confirms that the HMPZC method has a better chance of enhancing the power delivery capability of the power loop than the conventional MPZC method.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- IEEE Std 1547-2018; IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. IEEE: Piscataway, NJ, USA, 2018; pp. 1–138. [CrossRef]
- Srikanth, M.; Kumar, Y.V.P.; Amir, M.; Mishra, S.; Iqbal, A. Improvement of Transient Performance in Microgrids: Comprehensive Review on Approaches and Methods for Converter Control and Route of Grid Stability. IEEE Open J. Ind. Electron. Soc. 2023, 4, 534–572. [Google Scholar] [CrossRef]
- Yu, M.; Huang, W.; Tai, N.; Zheng, X.; Wu, P.; Chen, W. Transient Stability Mechanism of Grid-Connected Inverter-Interfaced Distributed Generators Using Droop Control Strategy. Appl. Energy 2018, 210, 737–747. [Google Scholar] [CrossRef]
- Yadav, M.; Jaiswal, P.; Singh, N. Fuzzy Logic-Based Droop Controller for Parallel Inverter in Autonomous Microgrid Using Vectored Controlled Feed-Forward for Unequal Impedance. J. Inst. Eng. India Ser. B 2021, 102, 691–705. [Google Scholar] [CrossRef]
- Li, M.; Wang, Y.; Hu, W.; Shu, S.; Yu, P.; Zhang, Z.; Blaabjerg, F. Unified Modeling and Analysis of Dynamic Power Coupling for Grid-Forming Converters. IEEE Trans. Power Electron. 2022, 37, 2321–2337. [Google Scholar] [CrossRef]
- Liu, L.; Tian, S.; Xue, D.; Zhang, T.; Chen, Y.; Zhang, S. A Review of Industrial MIMO Decoupling Control. Int. J. Control Autom. Syst. 2019, 17, 1246–1254. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, W.; Gu, D. Analytical Design of Decoupling Internal Model Control (IMC) Scheme for Two-Input−Two-Output (TITO) Processes with Time Delays. Ind. Eng. Chem. Res. 2006, 45, 3149–3160. [Google Scholar] [CrossRef]
- Wen, T.; Zhu, D.; Zou, X.; Jiang, B.; Peng, L.; Kang, Y. Power coupling mechanism analysis and improved decoupling control for virtual synchronous generator. IEEE Trans. Power Electron. 2021, 36, 3028–3041. [Google Scholar] [CrossRef]
- Wen, T.; Zou, X.; Zhu, D.; Guo, X.; Peng, L.; Kang, Y. Comprehensive Perspective on Virtual Inductor for Improved Power Decoupling of Virtual Synchronous Generator Control. IET Renew. Power Gener. 2020, 14, 485–494. [Google Scholar] [CrossRef]
- Rathnayake, D.B.; Bahrani, B. Multivariable Control Design for Grid-Forming Inverters with Decoupled Active and Reactive Power Loops. IEEE Trans. Power Electron. 2023, 38, 1635–1649. [Google Scholar] [CrossRef]
- Lin, X.; Peng, J.C.-H.; Li, Q.; Cheng, D.; Yu, J.; Wen, H. Power Coupling and Stability Analysis of GFM Due to Rotational Frames and Control Loops Interaction. Int. J. Electr. Power Energy Syst. 2024, 157, 109829. [Google Scholar] [CrossRef]
- Haddadi, A.; Yazdani, A.; Joos, G.; Boulet, B. A Gain-Scheduled Decoupling Control Strategy for Enhanced Transient Performance and Stability of an Islanded Active Distribution Network. IEEE Trans. Power Delivery 2014, 29, 560–569. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. Automatic Tuning of Cascaded Controllers for Power Converters Using Eigenvalue Parametric Sensitivities. IEEE Trans. Ind. Appl. 2015, 51, 1743–1753. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Case Studies on Cascade Voltage Control of Islanded Microgrids Based on the Internal Model Control. IFAC-PapersOnLine 2015, 48, 578–582. [Google Scholar] [CrossRef]
- Fu, X.; Li, S. A Novel Neural Network Vector Control for Single-Phase Grid-Connected Converters with L, LC and LCL Filters. Energies 2016, 9, 328. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Internal Model-Based Current Control of the RL Filter-Based Voltage-Sourced Converter. IEEE Trans. Energy Convers. 2014, 29, 873–881. [Google Scholar] [CrossRef]
- Leitner, S.; Yazdanian, M.; Mehrizi-Sani, A.; Muetze, A. Small-Signal Stability Analysis of an Inverter-Based Microgrid with Internal Model-Based Controllers. IEEE Trans. Smart Grid 2018, 9, 5393–5402. [Google Scholar] [CrossRef]
- Pavan Kumar, Y.V.; Bhimasingu, R. Design of Voltage and Current Controller Parameters Using Small Signal Model-Based Pole-Zero Cancellation Method for Improved Transient Response in Microgrids. SN Appl. Sci. 2021, 3, 836. [Google Scholar] [CrossRef]
- Srikanth, M.; Venkata Pavan Kumar, Y. PSO Based Modified Pole-Zero Cancellation Technique for VSI Control to Improve Transient Response in Microgrids. Int. J. Renew. Energy Res. 2024, in press.
- Comanescu, M.; Xu, L.; Batzel, T.D. Decoupled Current Control of Sensorless Induction-Motor Drives by Integral Sliding Mode. IEEE Trans. Ind. Electron. 2008, 55, 3836–3845. [Google Scholar] [CrossRef]
- Rohten, J.A.; Dewar, D.N.; Zanchetta, P.; Formentini, A.; Muñoz, J.A.; Baier, C.R.; Silva, J.J. Multivariable Deadbeat Control of Power Electronics Converters with Fast Dynamic Response and Fixed Switching Frequency. Energies 2021, 14, 313. [Google Scholar] [CrossRef]
- Junior, R.S.R.; Machado, E.P.; Júnior, D.F. Development of a multivariable deadbeat controller in dq coordinates for the current loop of a grid-connected VSI. J. Control Autom. Electr. Syst. 2024, 35, 588–600. [Google Scholar] [CrossRef]
- Holmes, D.G.; McGrath, B.P.; Parker, S.G. Current Regulation Strategies for Vector-Controlled Induction Motor Drives. IEEE Trans. Ind. Electron. 2012, 59, 3680–3689. [Google Scholar] [CrossRef]
- Babaei, S.; Parkhideh, B.; Chandorkar, M.C.; Fardanesh, B.; Bhattacharya, S. Dual Angle Control for Line-Frequency-Switched Static Synchronous Compensators Under System Faults. IEEE Trans. Power Electron. 2014, 29, 2723–2736. [Google Scholar] [CrossRef]
- Amézquita-Brooks, L.A.; Licéaga-Castro, J.; Licéaga-Castro, E.; Ugalde-Loo, C.E. Induction Motor Control: Multivariable Analysis and Effective Decentralized Control of Stator Currents for High-Performance Applications. IEEE Trans. Ind. Electron. 2015, 62, 6818–6832. [Google Scholar] [CrossRef]
- Bahrani, B.; Kenzelmann, S.; Rufer, A. Multivariable-PI-Based dq Current Control of Voltage Source Converters with Superior Axis Decoupling Capability. IEEE Trans. Ind. Electron. 2011, 58, 3016–3026. [Google Scholar] [CrossRef]
- Ashabani, M.; Mohamed, Y.A.-R.I.; Mirsalim, M.; Aghashabani, M. Multivariable Droop Control of Synchronous Current Converters in Weak Grids/Microgrids with Decoupled Dq-Axes Currents. IEEE Trans. Smart Grid 2015, 6, 1610–1620. [Google Scholar] [CrossRef]
- Ghasemi, M.A.; Zarei, S.F.; Peyghami, S.; Blaabjerg, F. A Theoretical Concept of Decoupled Current Control Scheme for Grid-Connected Inverter with L-C-L Filter. Appl. Sci. 2021, 11, 6256. [Google Scholar] [CrossRef]
- Gopi Krishna Rao, P.V.; Subramanyam, M.V.; Satyaprasad, K. Design of Internal Model Control-Proportional Integral Derivative Controller with Improved Filter for Disturbance Rejection. Syst. Sci. Control. Eng. 2014, 2, 583–592. [Google Scholar] [CrossRef]
- Woldeamanuel, L.H.; Ramaveerapathiran, A. Design of Multivariable PID Control Scheme for Humidity and Temperature Control of Neonatal Incubator. IEEE Access 2024, 12, 6051–6062. [Google Scholar] [CrossRef]
- Touqan, B.; Abdul, A.A.; Salameh, M. HVAC multivariable system modelling and control. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 2049–2061. [Google Scholar] [CrossRef]
- Luan, X.; Chen, Q.; Liu, F. Equivalent Transfer Function Based Multi-Loop PI Control for High Dimensional Multivariable Systems. Int. J. Control Autom. Syst. 2015, 13, 346–352. [Google Scholar] [CrossRef]
- Ogunba, K.S.; Fakunle, A.A.; Ogunfunmi, T.; Taiwo, O. Extended Approach to Analytical Triangular Decoupling Internal Model Control of Square Stable Multivariable Systems with Delays and Right-Half-Plane Zeros. IEEE Access 2023, 11, 32201–32228. [Google Scholar] [CrossRef]
- Liu, K.; Chen, J. Internal Model Control Design Based on Equal Order Fractional Butterworth Filter for Multivariable Systems. IEEE Access 2020, 8, 84667–84679. [Google Scholar] [CrossRef]
- Chekari, T.; Mansouri, R.; Bettayeb, M. Improved Internal Model Control-Proportional-Integral-Derivative Fractional-Order Multiloop Controller Design for Non Integer Order Multivariable Systems. J. Dyn. Syst. Meas. Control 2019, 141, 011014. [Google Scholar] [CrossRef]
- Skogestad, S. Simple Analytic Rules for Model Reduction and PID Controller Tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef]
- Azar, A.T.; Serrano, F.E. Robust IMC–PID Tuning for Cascade Control Systems with Gain and Phase Margin Specifications. Neural Comput. Appl. 2014, 25, 983–995. [Google Scholar] [CrossRef]
- Ramezani, M.; Li, S.; Sun, Y. Combining Droop and Direct Current Vector Control for Control of Parallel Inverters in Microgrid. IET Renew. Power Gener. 2017, 11, 107–114. [Google Scholar] [CrossRef]
- Kumar, Y.V.P.; Bhimasingu, R. Fuzzy Logic Based Adaptive Virtual Inertia in Droop Control Operation of the Microgrid for Improved Transient Response. In Proceedings of the 2017 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Bangalore, India, 8–10 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Case | Load 1 (kW + jkVar) | Load 2 (kW + jkVar) | Operating Power Factor | ||
|---|---|---|---|---|---|
| 0–80 s | 80–90 s | 90–160 s | |||
| T1 | 1.2 + j0.3 | 0.3 + j3.5 | 0.97 | 0.37 | 0.97 |
| T2 | 1.2 + j0.3 | 0.3 + j5.0 | 0.97 | 0.27 | 0.97 |
| T3 | 1.2 + j0.3 | 0.3 + j8.0 | 0.97 | 0.18 | 0.97 |
| Parameter | Description | MPZC | HMPZC |
|---|---|---|---|
| TI | Time constant of GIplant(s) | 10 × 10−3 | 10 × 10−3 |
| TPWM | 1/switching frequency | 5 × 10−4 | 5 × 10−4 |
| Dp | Maximum P-ω droop gain of the APL | 1 × 10−4 | 1 × 10−4 |
| Dq | Maximum Q-v droop gain of the RPL | 1.48 × 10−3 | 1.48 × 10−3 |
| KIp,f | Proportional gain in the forward path of the CCL’s PI controller | 0.12 | 0.12 |
| KIi,f | Integral gain in the forward path of the CCL’s PI controller | 0.8 × 103 | 0.8 × 103 |
| KVp,f | Proportional gain in the forward path of the VCL’s PI controller | 5.65 × 10−4 | 5.65 × 10−4 |
| KVi,f | Integral gain in the forward path of the VCL’s PI controller | 0.248 | 0.248 |
| KIp,cc | Proportional gain in the cross-coupling path of CCL’s PID controller | 0.314 (ωoL) | 31.42 × 10−5 |
| KIi,cc | Integral gain in the cross-coupling path of the CCL’s PID controller | NA | 0.3142 |
| KId,cc | Derivative gain in cross-coupling path of CCL’s PID controller | NA | 0 |
| KVp,cc | Proportional gain in the cross-coupling path of VCL’s PID controller | 0.0016 (ωoC) | 15.7 |
| KVi,cc | Integral gain in cross-coupling path of VCL’s PID controller | NA | 7.85 × 103 |
| KVd,cc | Derivative gain in cross-coupling path of VCL’s PID controller | NA | 0 |
| Performance Characteristics | Test Case | Corresponding to Load Switching at t = 80 s | Corresponding to Load Switching at t = 90 s | |||||
|---|---|---|---|---|---|---|---|---|
| Conv. MPZC [18,19] | Prop. HMPZC | Superior Method | Conv. MPZC [18,19] | Prop. HMPZC | Superior Method | |||
| Frequency characteristics Desired:
| Max. deviation during overshoot (Hz) | T1 | 0 | 0 | Both | 0.015 | 0.010 | HMPZC |
| T2 | 0.001 | 0 | Both | 0.020 | 0.020 | Both | ||
| T3 | 0.005 | 0.004 | HMPZC | 0.400 | 0.025 | HMPZC | ||
| Max. deviation during undershoot (Hz) | T1 | 0.002 | 0.002 | Both | 0.040 | 0.007 | HMPZC | |
| T2 | 0.002 | 0.002 | Both | 0.050 | 0.009 | HMPZC | ||
| T3 | 0.003 | 0.003 | Both | 0.400 | 0.017 | HMPZC | ||
| Power characteristics Desired:
| System stability (Stable/Unstable) | T1 | Stable | Stable | Both | Stable | Stable | Both |
| T2 | Stable | Stable | Both | Stable | Stable | Both | ||
| T3 | Stable | Stable | Both | Unstable | Stable | HMPZC | ||
| Extra burden (Watts) | T1 | 1529 | 1308 | HMPZC | 851 | 613 | HMPZC | |
| T2 | 2307 | 1914 | HMPZC | 1114 | 928 | HMPZC | ||
| T3 | 6083 | 4751 | HMPZC | 1952 | 1845 | HMPZC | ||
Voltage characteristics
| THD (%) | T1 | NC | NC | -- | 3.49 | 3.08 | HMPZC |
| T2 | NC | NC | -- | 5.62 | 3.33 | HMPZC | ||
| T3 | NC | NC | -- | 20.2 | 3.39 | HMPZC | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Srikanth, M.; Venkata Pavan Kumar, Y.; Pradeep Reddy, C.; Mallipeddi, R. Multivariable Control-Based dq Decoupling in Voltage and Current Control Loops for Enhanced Transient Response and Power Delivery in Microgrids. Energies 2024, 17, 3689. https://doi.org/10.3390/en17153689
Srikanth M, Venkata Pavan Kumar Y, Pradeep Reddy C, Mallipeddi R. Multivariable Control-Based dq Decoupling in Voltage and Current Control Loops for Enhanced Transient Response and Power Delivery in Microgrids. Energies. 2024; 17(15):3689. https://doi.org/10.3390/en17153689
Chicago/Turabian StyleSrikanth, Mandarapu, Yellapragada Venkata Pavan Kumar, Challa Pradeep Reddy, and Rammohan Mallipeddi. 2024. "Multivariable Control-Based dq Decoupling in Voltage and Current Control Loops for Enhanced Transient Response and Power Delivery in Microgrids" Energies 17, no. 15: 3689. https://doi.org/10.3390/en17153689
APA StyleSrikanth, M., Venkata Pavan Kumar, Y., Pradeep Reddy, C., & Mallipeddi, R. (2024). Multivariable Control-Based dq Decoupling in Voltage and Current Control Loops for Enhanced Transient Response and Power Delivery in Microgrids. Energies, 17(15), 3689. https://doi.org/10.3390/en17153689