
Coordinated Charging Scheduling Approach for Plug-In Hybrid Electric Vehicles Considering Multi-Objective Weighting Control in a Large-Scale Future Smart Grid


Abstract
1. Introduction
- (1)
- A model of multi-objective optimization is established, incorporating the constraint of the owner’s emergence charging demand. By adjusting the cost weighting factor and the load stability weighting factor in the multi-objective function, the grid allows for flexible weight selection between owners to actively participate in coordinated charging scheduling, setting it apart from existing works.
- (2)
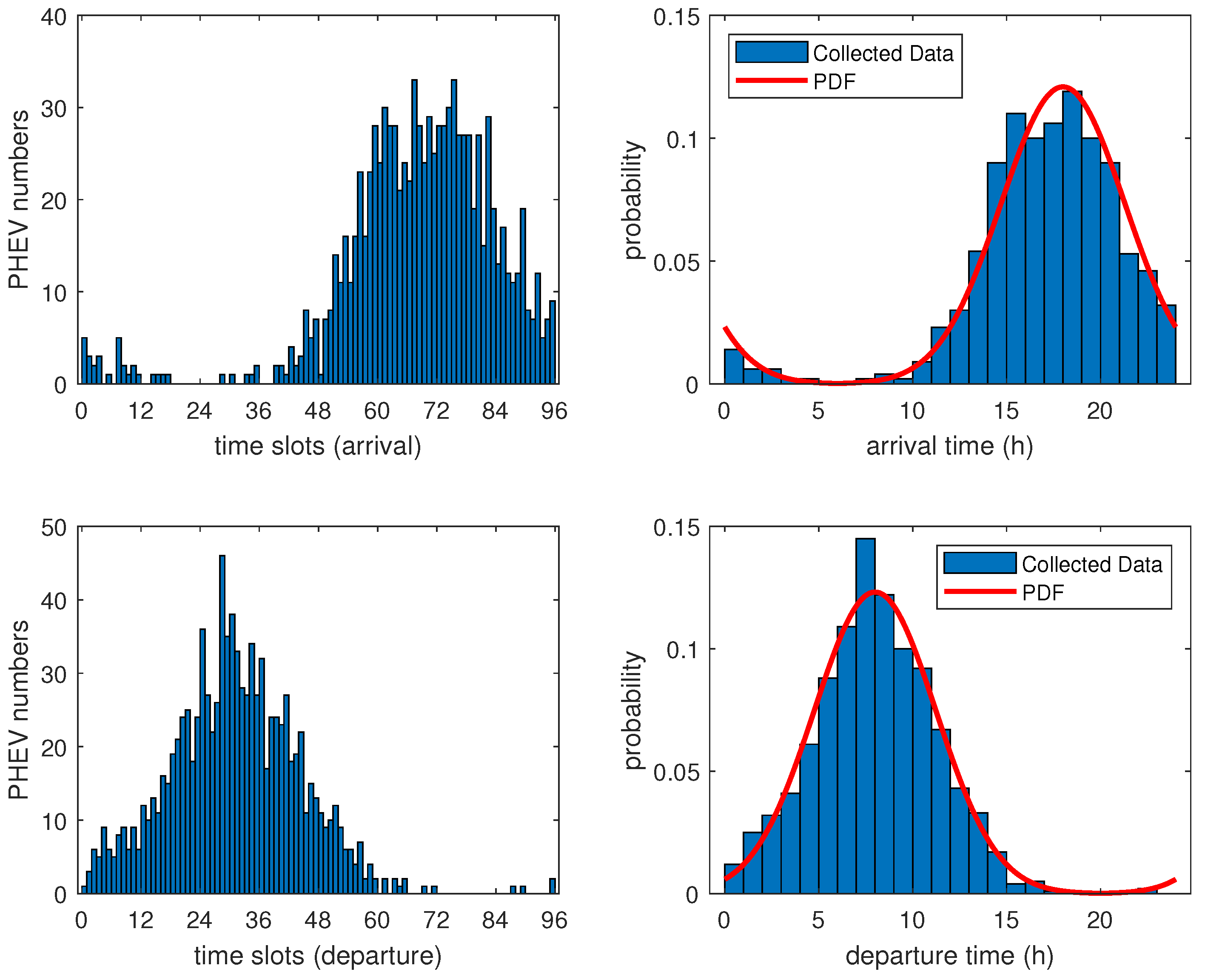
- The charging behavior of PHEV owners in this paper is characterized by a normal distribution, which represents a more comprehensive approach compared to the existing literature. It is evident that owners typically initiate the charging process upon arriving home and conclude it when departing for their workplace. Moreover, the end-charging battery level of PHEV users and their emergency charging requirements are integrated as constraint conditions to encourage and promote active engagement in collaborative charging scheduling.
- (3)
- The proposed algorithm is suitable for future smart grids with a large number of electric vehicles, demonstrating excellent scalability and adaptability to various charging scenarios compared to existing state-of-the-art solutions. This makes it more convenient and provides better performance for grid implementation.
2. System Model
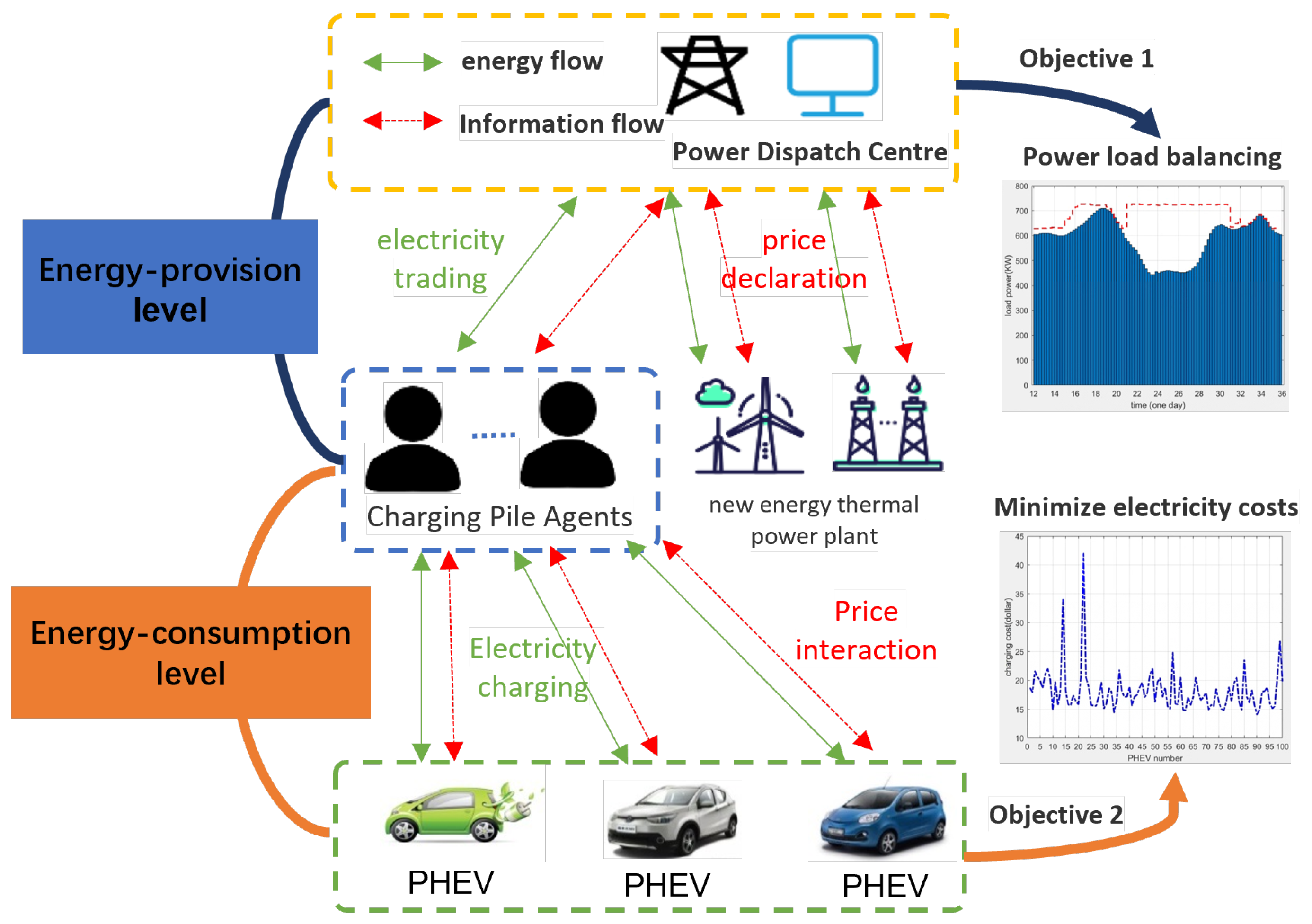
2.1. Future Smart Grid Modeling
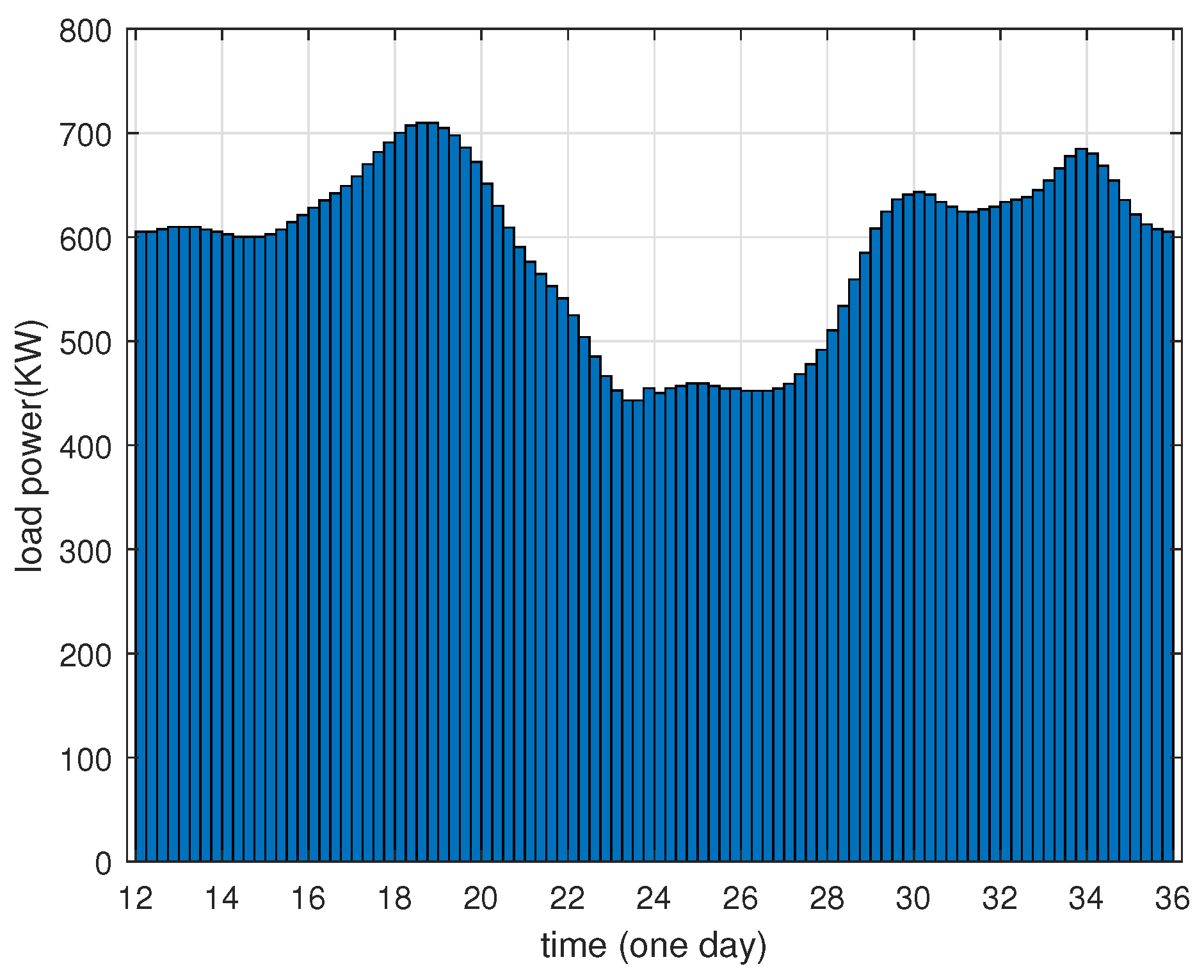
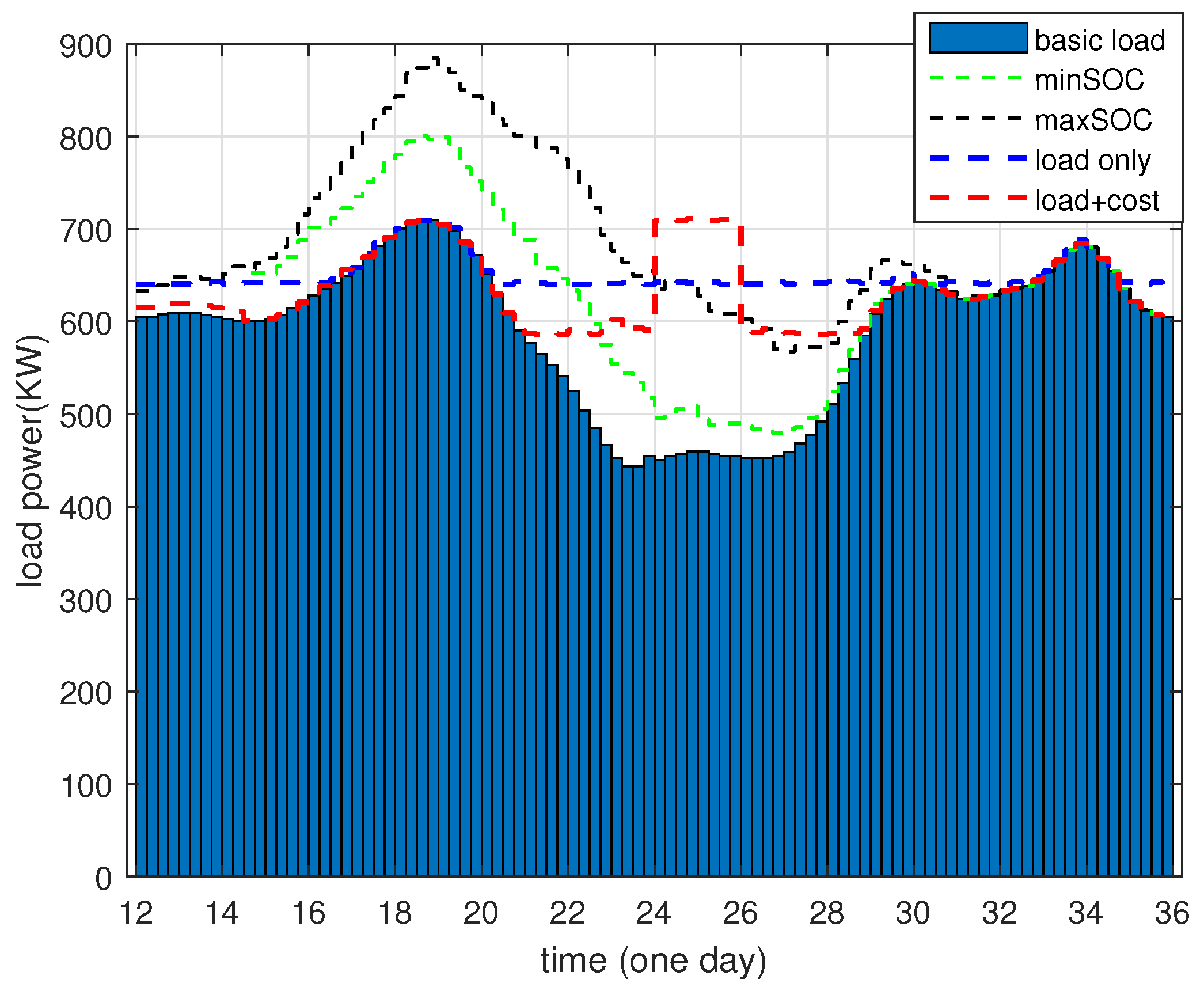
2.2. Typical Basic Load Profile
2.3. PHEV Charging Behavior Modeling
3. Problem Formulation
3.1. Preliminaries
3.2. Optimization Objective Description
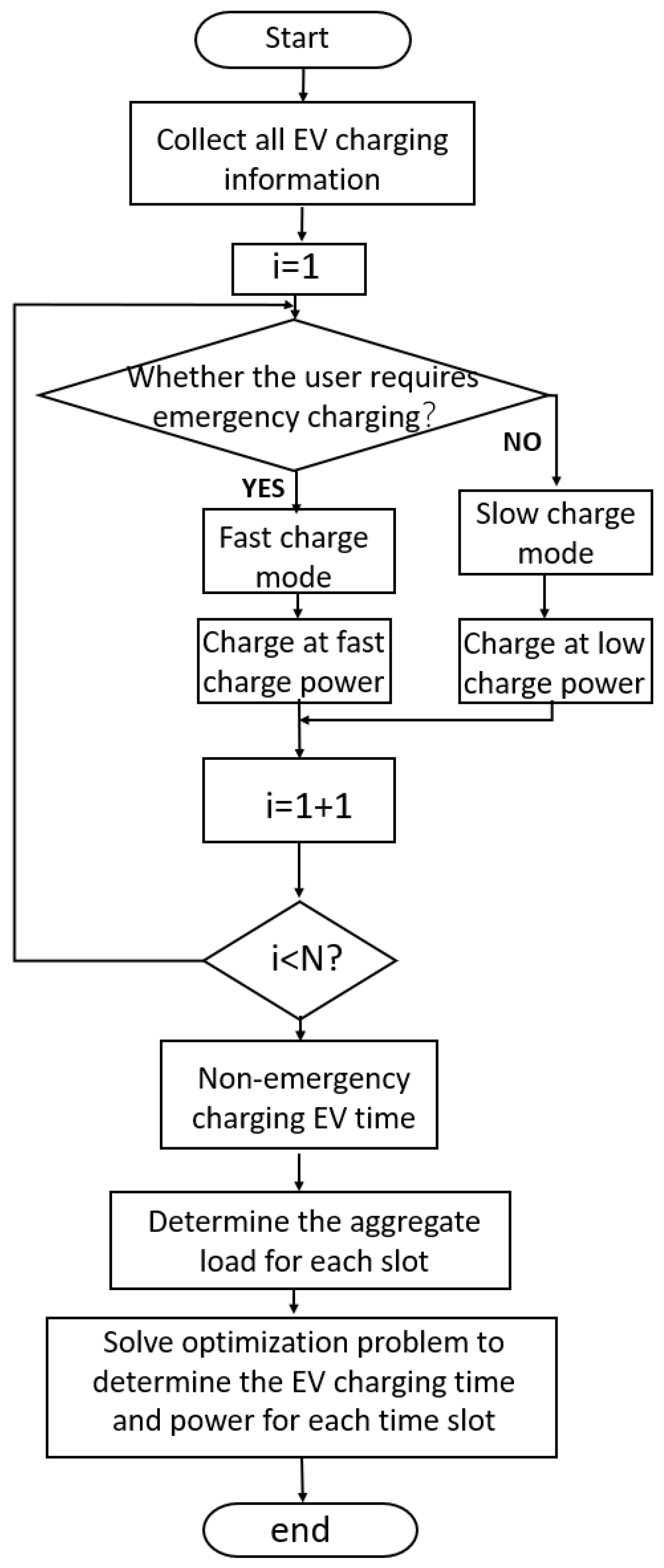
3.3. Optimization Constraints
- (i)
- Constraints for PHEVs in fast charging mode
- (ii)
- Enhanced requirements for PHEVs in slow charging mode
- (iii)
- Enhanced constraints for the smart grid
4. Main Results and Discussions
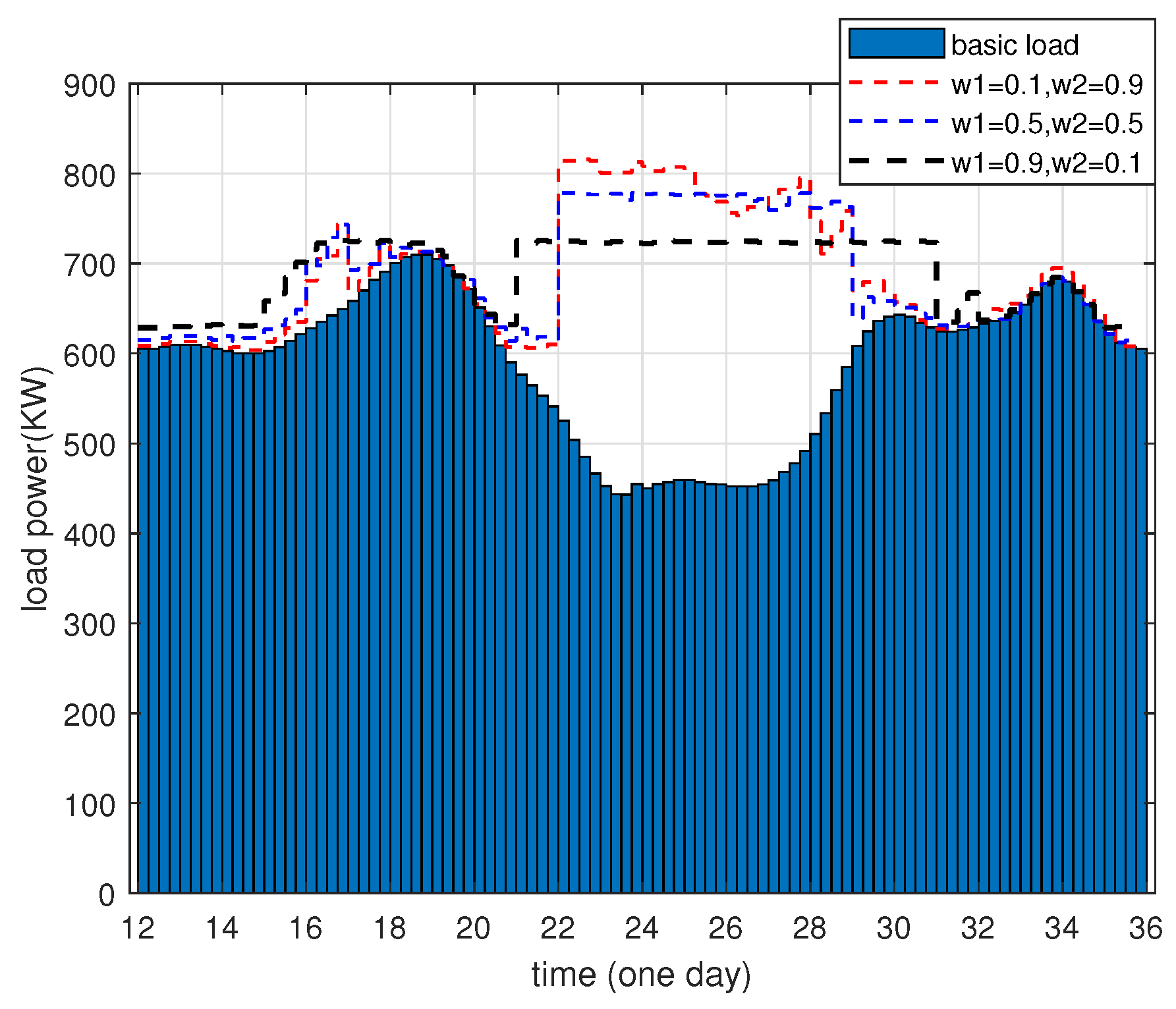
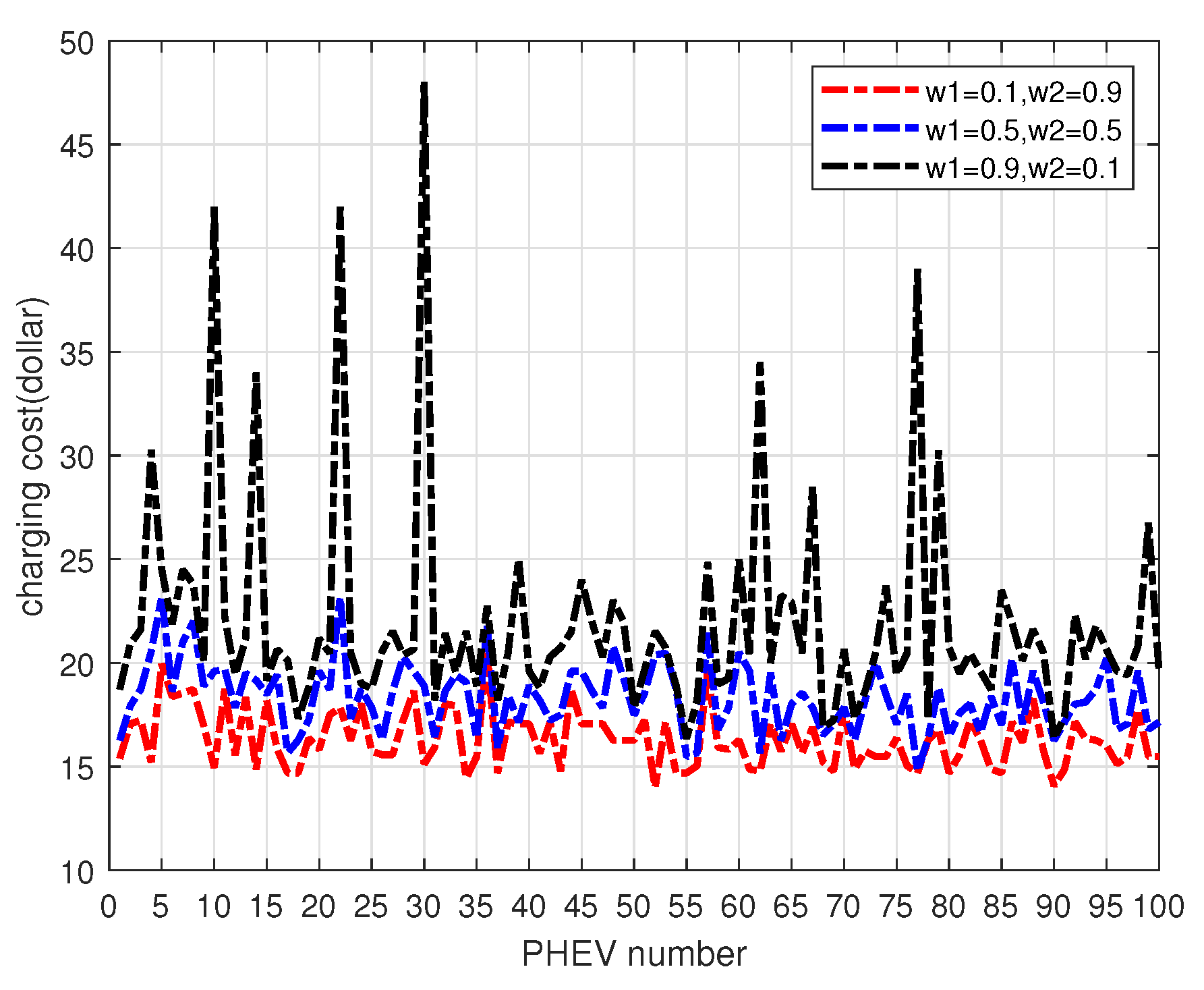
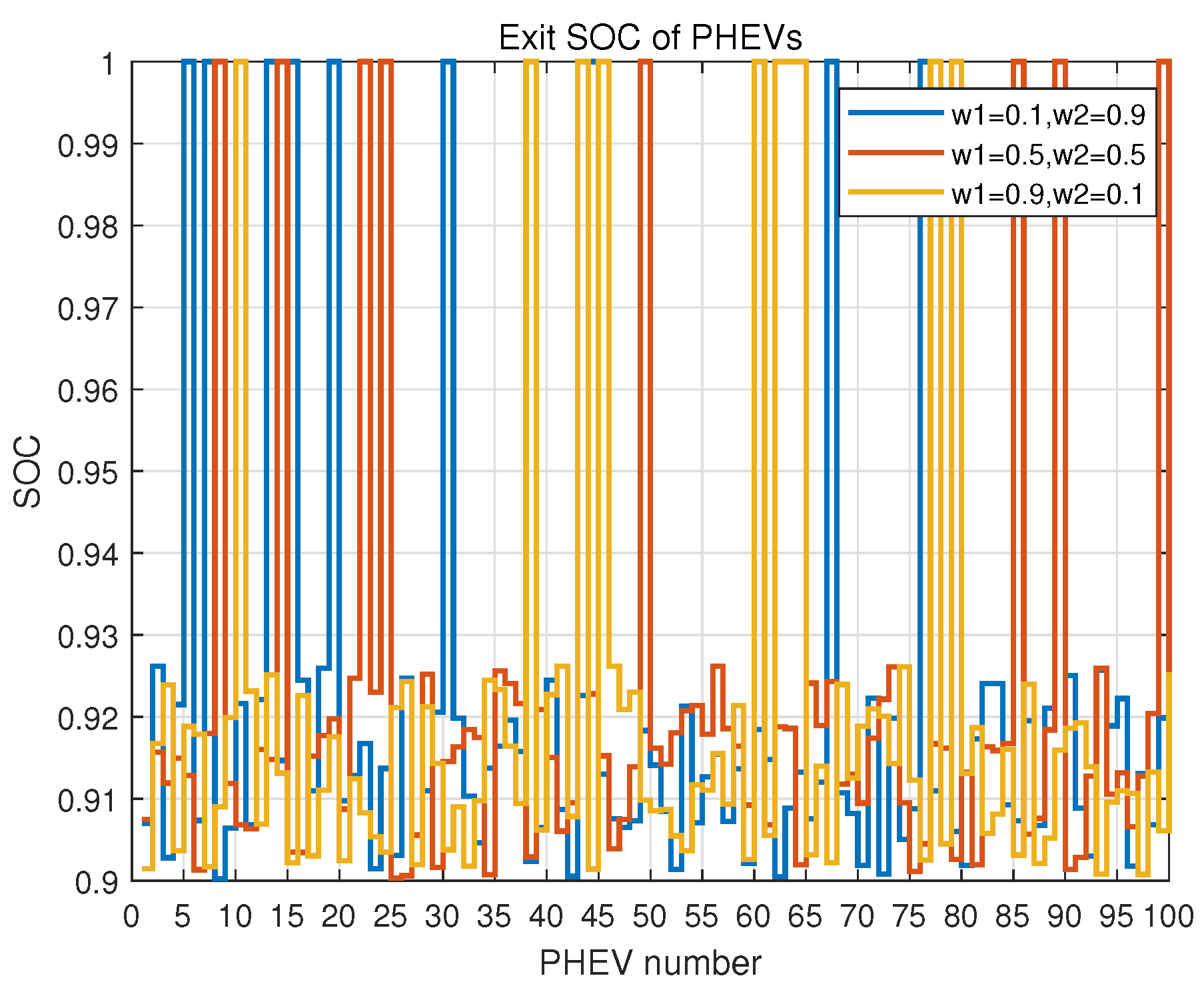
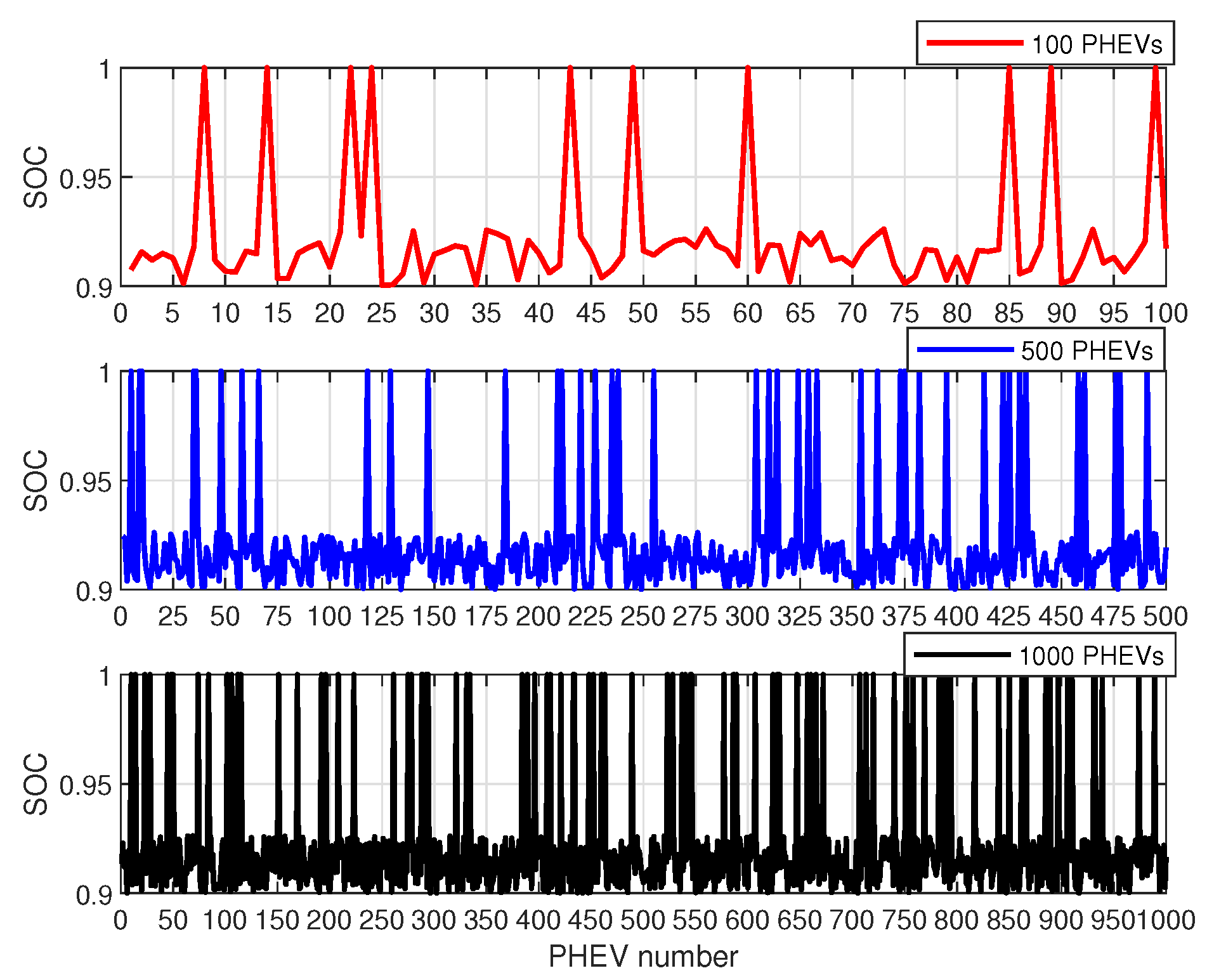
4.1. Low-Level Penetration with 100 PHEVs
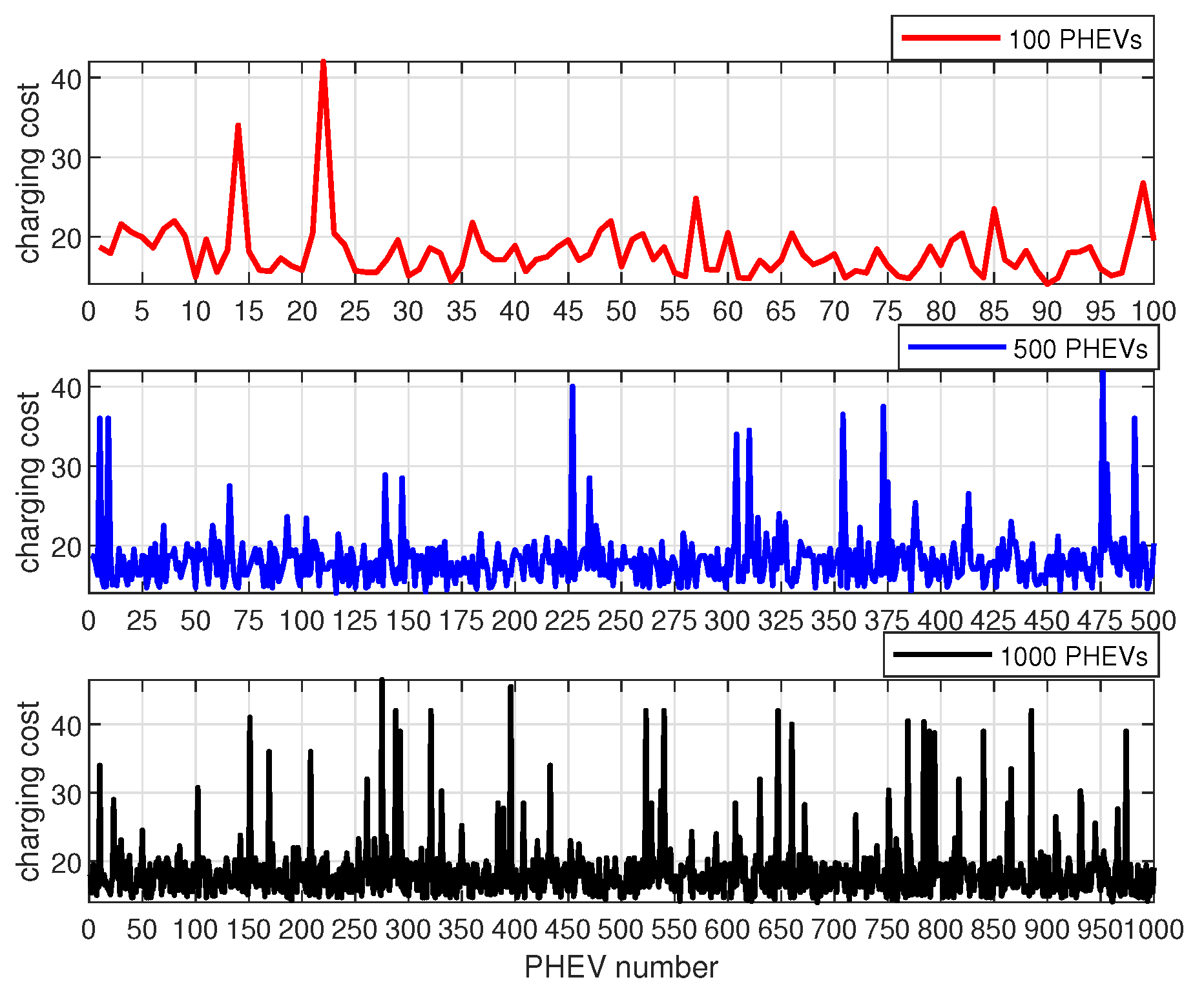
4.2. High-Level Penetration with 1000 PHEVs
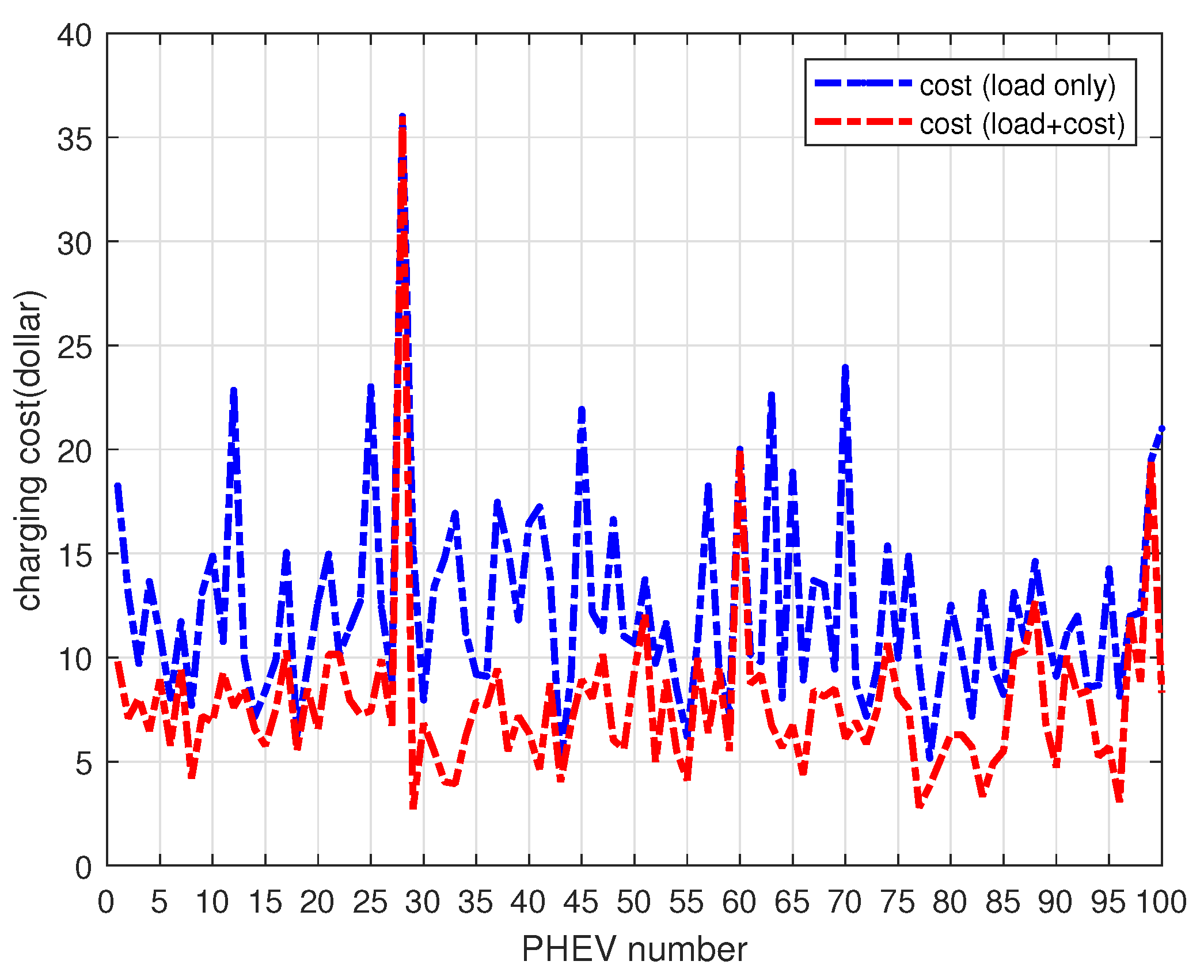
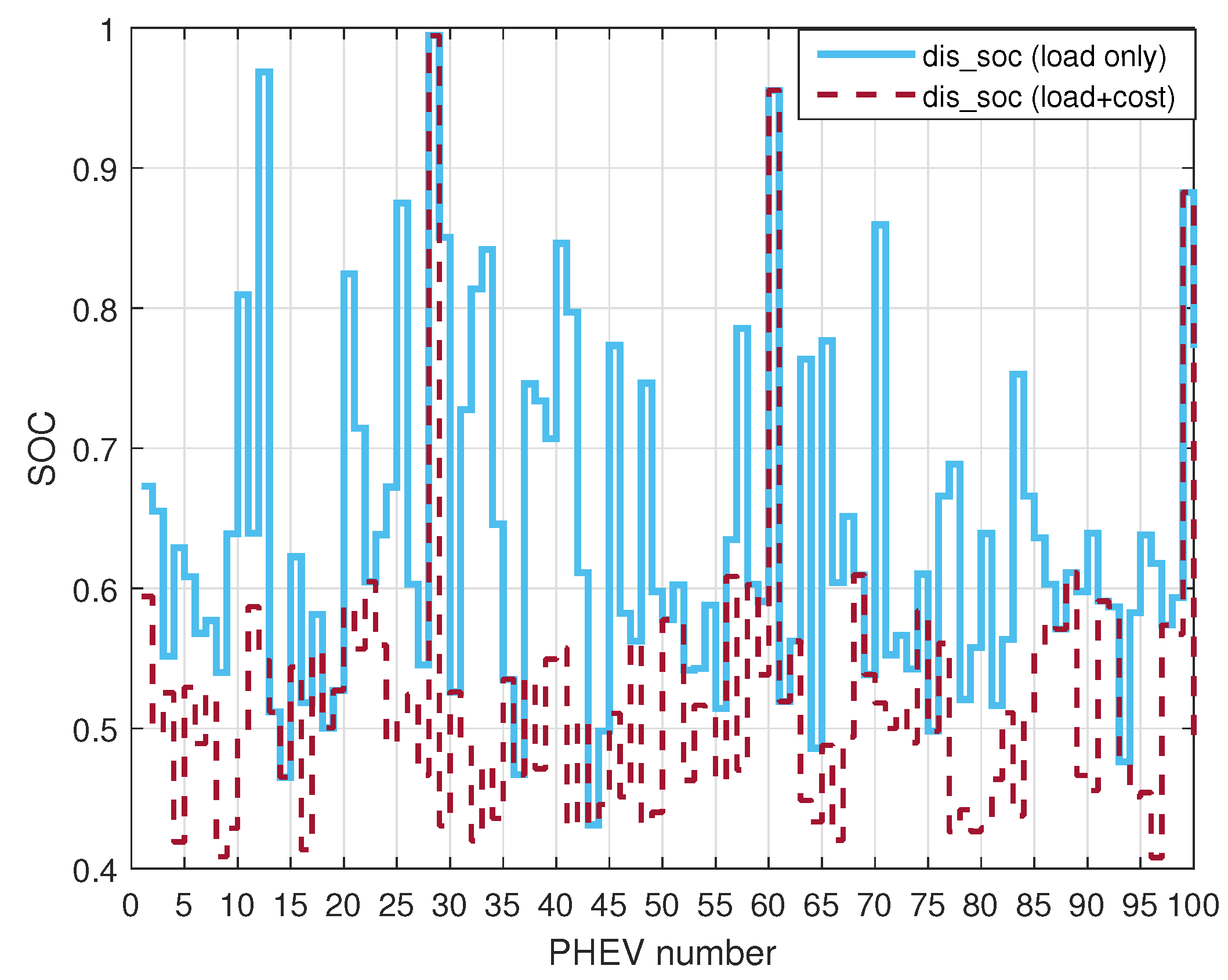
4.3. Comparisons between Proposed Algorithm and the Literature [25]
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Y.; Wu, Y.K.; Tang, Y.J. Cooperative energy management and eco-driving of plug-in hybrid electric vehicle via multi-agent reinforcement learning. Appl. Energ. 2023, 332, 120563. [Google Scholar] [CrossRef]
- Sun, X.L.; Fu, J.Q.; Yang, H.Y. An energy management strategy for plug-in hybrid electric vehicles based on deep learning and improved model predictive control. Energy 2023, 269, 126772. [Google Scholar] [CrossRef]
- Robert, C. Green and Lingfeng Wang and Mansoor Alam. The impact of plug-in hybrid electric vehicles on distribution networks: A review and outlook. Renew. Sust. Energ. Rev. 2011, 15, 544–553. [Google Scholar]
- Hoffmann, F.; Person, J.; Andresen, M. A Multiport Partial Power Processing Converter with Energy Storage Integration for EV Stationary Charging. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7950–7962. [Google Scholar] [CrossRef]
- Bai, Y.; Qian, Q. Optimal placement of parking of electric vehicles in smart grids, considering their active capacity. Electr. Power Syst. Res. 2023, 220, 109238. [Google Scholar] [CrossRef]
- Qays, M.O.; Ahmad, I.; Abu-Siada, A. Key communication technologies, applications, protocols and future guides for IoT-assisted smart grid systems: A review. Energy Rep. 2023, 9, 2440–2452. [Google Scholar] [CrossRef]
- Mobtahej, M.; Barzegaran, M.; Esapour, K. A novel three-stage demand side management framework for stochastic energy scheduling of renewable microgrids. Sol. Energy 2023, 256, 32–43. [Google Scholar] [CrossRef]
- Shao, S.; Pipattanasomporn, M.; Rahman, S. Demand response as a load shaping tool in an intelligent grid with electric vehicles. IEEE Trans. Smart Grid 2011, 2, 624–631. [Google Scholar] [CrossRef]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized charging control of large populations of plug-in electric vehicles. IEEE Trans. Control Syst. Technol. 2013, 21, 67–78. [Google Scholar] [CrossRef]
- Gan, L.; Topcu, U.; Low, S.H. Optimal decentralized protocol for electric vehicle charging. IEEE Trans. Power Syst. 2013, 28, 940–951. [Google Scholar] [CrossRef]
- Zaini, F.A.; Sulaima, M.F.; Razak, I.A.W.A. A Review on the Applications of PSO-Based Algorithm in Demand Side Management: Challenges and Opportunities. IEEE Access 2023, 11, 53373–53400. [Google Scholar] [CrossRef]
- Muhandiram, I.; Peter, K. Uncertainties in model predictive control for decentralized autonomous demand side management of electric vehicles. J. Energ. Storage 2024, 83, 110194. [Google Scholar]
- Kandidayeni, M.; Trovao, J.P.F.; Boulon, L.; Kelouwani, S. Health-Wise Energy Management Strategies in Fuel Cell Hybrid Electric Vehicles: Tools to optimize performance and reduce operational costs. IEEE Electrif. Mag. 2024, 12, 80–88. [Google Scholar] [CrossRef]
- Jia, C.C.; Zhou, J.M.; He, H.W.; Li, J.W.; Wei, Z.B.; Li, K. Health-conscious deep reinforcement learning energy management for fuel cell buses integrating environmental and look-ahead road information. Energy 2024, 290, 130146. [Google Scholar] [CrossRef]
- Kang, Q.; Feng, S.W.; Zhou, M.C. Optimal Load Scheduling of Plug-In Hybrid Electric Vehicles via Weight-Aggregation Multi-Objective Evolutionary Algorithms. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2557–2568. [Google Scholar] [CrossRef]
- Yu, R.; Ding, J.; Zhong, W.; Liu, Y.; Xie, S. PHEV charging and discharging cooperation in V2G networks: A coalition game approach. IEEE Internet Things J. 2014, 1, 578–589. [Google Scholar] [CrossRef]
- Giorgio, A.D.; Liberati, F. Near real time load shifting control for residential electricity prosumers under designed and market indexed pricing models. Appl. Energ. 2014, 128, 119–132. [Google Scholar] [CrossRef]
- Oliveira, D.Q.; Zambroni, S.; Delboni, L. Optimal plug-in hybrid electric vehicles recharge in distribution power systems. Elec. Power Syst. Res. 2012, 98, 77–85. [Google Scholar] [CrossRef]
- Sousa, T.; Morais, H.; Soares, J.; Vale, Z. Day-ahead resource scheduling in smart grids considering Vehicle-to-Grid and network constraints. Appl. Energ. 2012, 96, 183–193. [Google Scholar] [CrossRef]
- White, C.D.; Zhang, K.M. Using vehicle-to-grid technology for frequency regulation and peak-load reduction. J. Power Sources 2011, 196, 397280. [Google Scholar] [CrossRef]
- Bai, X.; Qiao, W.; Wei, H.; Huang, F.; Chen, Y. Bidirectional coordinating dispatch of large-scale V2G in a future smart grid using complementarity optimization. Int. J. Electr. Power Energy Syst. 2015, 68, 26977. [Google Scholar] [CrossRef]
- Saber, A.Y.; Venayagamoorthy, G.K. Plug-in vehicles and renewable energy sources for cost and emission reductions. IEEE Trans. Ind. Electron. 2011, 58, 1229–1238. [Google Scholar] [CrossRef]
- Yang, J.; He, L.; Fu, S. An improved PSO-based charging strategy of electric ve hicles in electrical distribution grid. Appl. Energy 2014, 128, 82–92. [Google Scholar] [CrossRef]
- Mohsen, Z.; Mohammad-Amin, A.; Rasoul, A.; Mostafa, M. A modified Particle Swarm Optimization algorithm with enhanced search quality and population using Hummingbird Flight patterns. Decis. Anal. J. 2023, 7, 100251. [Google Scholar]
- Zhou, K.; Cheng, L.; Wen, L.; Lu, X.; Ding, T. A coordinated charging scheduling method for electric vehicles considering different charging demands. Energy 2020, 213, 118882. [Google Scholar] [CrossRef]
- Rind, Y.M.; Raza, M.H.; Zubair, M.; Mehmood, M.Q.; Massoud, Y. Smart Energy Meters for Smart Grids, an Internet of Things Perspective. Energies 2023, 160, 1974. [Google Scholar] [CrossRef]
- Pugachev, V.S. Probability Theory and Mathematical Statistics for Engineers; Pergamon Press: Oxford, UK, 1984. [Google Scholar]
- Zheng, Y.C.; Shang, Y.T.; Shao, Z.Y.; Jian, L.N. A novel real-time scheduling strategy with near-linear complexity for integrating large-scale electric vehicles into smart grid. Appl. Energy 2018, 217, 1–13. [Google Scholar] [CrossRef]
- Li, J.; Wang, G.; Wang, X.; Du, Y. Smart charging strategy for electric vehicles based on marginal carbon emission factors and time-of-use price. Sustain. Cities Soc. 2023, 96, 104708. [Google Scholar] [CrossRef]
- Gurobi Optimization LLC 2020 Gurobi Optimizer Reference Manual. Available online: https://www.gurobi.com/documentation/current/refman/index.html (accessed on 25 June 2024).
- Meindl, B.; Templ, M. Analysis of Commercial and Free and Open-Source Solvers for Linear Optimization Problems. Eurostat and Statistics Netherlands within the Project ESSnet on Common Tools and Harmonized Methodology for SDC in the ESS. 2012. Available online: https://www.researchgate.net/profile/Matthias-Templ/publication/265117825_Analysis_of_commercial_and_free_and_open_source_solvers_for_linear_optimization_problems/links/54817d2d0cf22525dcb61883/Analysis-of-commercial-and-free-and-open-source-solvers-for-linear-optimization-problems.pdf (accessed on 25 June 2024).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (kW) | (kW) | (kWh) | (%) | (%) | (%) | (%) |
|---|---|---|---|---|---|---|
| 3.5 | 10 | 30 | 90 | 10–30 | 90% | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Shi, J.; Zhou, H. Coordinated Charging Scheduling Approach for Plug-In Hybrid Electric Vehicles Considering Multi-Objective Weighting Control in a Large-Scale Future Smart Grid. Energies 2024, 17, 3148. https://doi.org/10.3390/en17133148
Li W, Shi J, Zhou H. Coordinated Charging Scheduling Approach for Plug-In Hybrid Electric Vehicles Considering Multi-Objective Weighting Control in a Large-Scale Future Smart Grid. Energies. 2024; 17(13):3148. https://doi.org/10.3390/en17133148
Chicago/Turabian StyleLi, Wei, Jiekai Shi, and Hanyun Zhou. 2024. "Coordinated Charging Scheduling Approach for Plug-In Hybrid Electric Vehicles Considering Multi-Objective Weighting Control in a Large-Scale Future Smart Grid" Energies 17, no. 13: 3148. https://doi.org/10.3390/en17133148
APA StyleLi, W., Shi, J., & Zhou, H. (2024). Coordinated Charging Scheduling Approach for Plug-In Hybrid Electric Vehicles Considering Multi-Objective Weighting Control in a Large-Scale Future Smart Grid. Energies, 17(13), 3148. https://doi.org/10.3390/en17133148