1. Introduction
The spread of Inverter-Based Resources (IBRs) in the power system has accelerated significantly, owing to the global push for renewable energy sources. These resources, which include solar, wind, and battery storage, connect to the electrical grid through power electronic inverters [
1]. According to [
2], the swing characteristics, synchronization procedures, and grid interaction dynamics can be reconceptualized as a current-angle swing and a voltage-angle swing, also known as grid-forming (GFM) and grid-following (GFL).
The current environment of GFL inverters relies extensively on the grid’s frequency and voltage parameters as critical reference points for their operational functionality. While this method of operation has previously sufficed in systems dominated by conventional power plants, the introduction of high IBR penetration rates introduces variability and uncertainty, posing new issues [
3]. Notably, the Western Electricity Coordinating Council (WECC) has worked hard to create generic models for these inverters, which may then be used as standard templates in complete system studies. These standardized models are important in assessing the impact of IBRs on grid stability and overall performance [
4]. Nonetheless, given the increasing importance of IBRs in the energy mix, there is an urgent need to optimize their control systems, therefore improving grid dependability [
5]. The controllers integrated into the WECC generic models are rigorously tuned to deal with these complications, with the goal of increasing IBR dynamic responsiveness and their ability to contribute to system inertia, fault tolerance, and frequency regulation [
6]. In reference [
7], the research focuses on developing and validating large-scale photovoltaic (PV) plants to investigate power system stability using general WECC models. Specific control models used include REPC_A, REEC_B, and REGC_A. However, the REEC_B model is no longer accessible and has been replaced by upgrades to either A-model or C-model control.
In the field of system dynamics and stability, the authors in reference [
8] distributed GFM and GFL throughout a large number of locations, resulting in a significant adoption of IBRs. This study investigates the effects of GFM and GFL regulation on the behavior of large-scale transmission and distribution networks. The simulation is conducted through co-simulation and validated by utilizing high-performance computing resources to enable parallel simulation. Furthermore, the study evaluates the WECC generic model as a GFL. The outcome is dependent on the fact that while 100% of the GFL is under control, the IBRs will be limited to a particular percentage in order to ensure system stability. However, if 12% of the GFL is substituted with GFM, the IBRs can reach 100%. On the other hand, as stated in reference [
9], the functioning of GFM and GFL is influenced by mechanical inertia, penetration of the IBR level, and its power limit operation, which are assessed in conjunction with small-signal stability. It is aligned with [
10], which demonstrates the dynamic interaction between GFM and GFL in a 9-bus system through small-signal analysis. It is also analogous to [
11]. However, it solely focuses on studying the varying levels using GFM and synchronous generators [
12,
13].
This study focuses on the IEEE 9-bus system, which serves as a simplified representation of an electric grid. According to various referenced studies, large-scale simulations can be streamlined through equivalent generator modeling. Based on this study [
14], we can reduce the extensive model system into two main steps. First, classify generator types such as thermal, hydro, etc. Similar to the first step, the total load of each region is accumulated based on real grid information data. Furthermore, to demonstrate the effectiveness of the “equivalence” concept, real-time frequency monitoring developed by Oak Ridge National Laboratory (ORNL) is used for comparison. Additionally, another reference [
15] shows an evaluation of how much an extensive system can be reduced to test systems; it explains this through a modified IEEE 9-bus system. This modification is made according to the real-world Western System Coordinating Council (WSCC) network system. According to the comparison between the equivalent generator and the real system [
16], dynamic characteristics such as frequency nadir, recovery slope, and overshoot are consistent with measurement data from FNET/GridEye. The results show that the reduced model has a frequency response performance similar to the ERCOT system.
For instance, as detailed in [
16], the Electric Reliability Council of Texas (ERCOT) simplifies its power system network interconnection in electromagnetic transient (EMT) software, which used PSCAD Version 4, by utilizing equivalent generation modeling, especially for generators with high capacities. Additionally, other studies cited [
17,
18] demonstrate that equivalent or reduced models yield similar responses, particularly in terms of grid frequency and voltage during contingency studies. Drawing from these references, we classify the grid network size as medium, with a total generation capacity of approximately 100 MW. Other considerations are for nine buses only because (EMT) simulations can become challenging when dealing with large-scale power systems with numerous buses due to computational limitations. As the number of buses increases, the complexity of the simulation grows exponentially, resulting in longer computation times and increased memory requirements.
The goal of this study is to provide detailed insights into the effectiveness of controllers utilized in WECC generic (RE-A) models compared to GFM inverter control methods. The methods are simulated across a range of high to low IBR penetrations, with varying inertia values, and retain the synchronous generator in the grid depending on the simulation scenario. This approach allows us to analyze the system’s response under a wide array of conditions not discussed in detail in previous references [
8] due to the lack of inertia in the system’s variation. Moreover, the positive simulation results are validated with a small-signal parameter evaluation of GFL based on the WECC model, which previous references [
10] did not discuss in detail. Simulations and stability tests are used to determine optimal control solutions for various inertia system conditions, whether there are many IBRs in the system or only a few. These aspects were not discussed in detail in previous references [
13] due to the unavailability of case studies on full IBR penetration.
Lastly, we encompass a broader spectrum of grid parameters, such as variations in the capacity and inertia of synchronous generators. We propose determining the optimal GFM capacity through the application of the least squares method to simulation data fitting tools. According to multiple references [
8,
9,
10,
11,
12,
13], there is currently no existing methodology for determining the optimal GFM ratio using a fitting technique. Furthermore, our proposed fitting technique demonstrated a high level of consistency when compared to frequency analysis conducted through existing heuristic simulations. Additionally, we introduce a polynomial equation that forecasts the frequency nadir based on the inertia system value and the ratio between GFM and GFL. This equation also facilitates the evaluation of prediction accuracy via the Root Mean Square Error (RMSE) value. By adjusting and altering the high-order values between inertia and the GFM ratio, a third-order polynomial demonstrates a resilient response with minimal error values, suggesting that the prediction is remarkably accurate and closely corresponds to the observed data.
3. Small-Signal Stability Analysis
As a reference [
34], this study delves into the analysis of grid stability within the Renewable Energy Generic Model (REGM). A key focus of the investigation is the incorporation of active power loop control, revealing that such control mechanisms have the potential to significantly enhance frequency stability, particularly in challenging islanding conditions. Building upon this foundation, the study goes on to offer an in-depth exploration of stability analysis, providing meticulous attention to the various parameters associated with active power loop control. Notably, the examination scrutinizes elements such as droop and proportional–integral control within the broader framework of plant control, offering a nuanced understanding of their impact on system stability.
To assess the frequency stability of the REGM, the study employs a System Frequency Response (SFR). This analytical approach offers a comprehensive perspective on the dynamic behavior of the system under varying conditions. Reference [
35] complements this analysis with a detailed exposition on a simplified SFR model applied specifically to the converter. Within this context, Equation (7) serves as a pivotal element, elucidating the intricate relationships between the plant-level control mechanisms implemented in the REGM and the resultant frequency response. In summary, this study not only scrutinizes the grid stability of the REGM but also provides a nuanced understanding of how active power loop control, with a detailed consideration of its parameters, influences frequency stability. The incorporation of System Frequency Response and the detailed model presented in reference [
35] enriches the analysis, offering valuable insights into the complex dynamics of the power system.
where
is the inertia value of the system,
is the power controller lag time constant,
is the droop coefficient for headroom reserve control, and
R(
s) is calculated from the power deviation between the branch and the reference value and is explained through Equation (8).
Utilizing the provided equations, an in-depth analysis of the small-signal behavior of the REGM can be conducted. This involves simulating various parameters, including droop coefficients related to headroom reserve control and proportional–integral control parameters. The simulation process entails systematically adjusting these parameters to observe their impact on the small-signal dynamics of the REGM. Specifically, the exploration involves scrutinizing the droop coefficients’ influence on the system’s responsiveness to changes in operating conditions. Additionally, the study focuses on understanding the role of proportional–integral control parameters in shaping the small-signal response of the system.
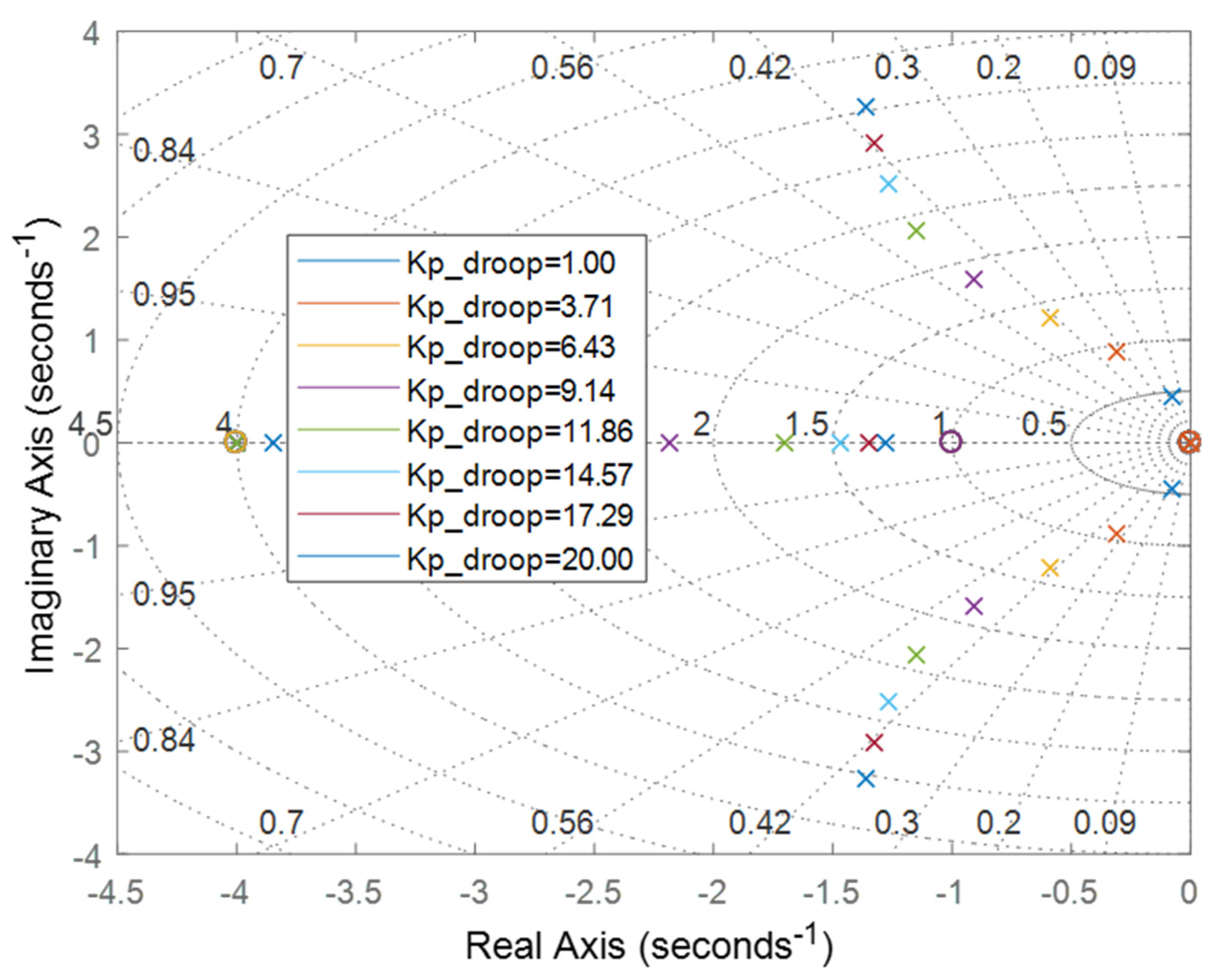
In
Figure 6, a noteworthy observation emerges: as the parameter
decreases, there is a discernible shift of the pole point to the right side. This indicates that, under low droop coefficient headroom reserve control, the pole of the plant control (REPC-A) resides within the unstable region. This positioning raises concerns about the system’s stability, particularly when operating with lower values of the droop coefficient for headroom reserve control. Conversely, an increase in
leads to an observable movement of the pole point to the upper side. It is essential to carefully choose and tune the droop coefficient to maintain stability in the system, as indicated by the pole-zero map analysis. Further analysis or tuning may be necessary to find an optimal range for the droop coefficient.
This shift could potentially give rise to overshoot issues if not accompanied by appropriate adjustment values. The implications of this movement highlight the delicate balance required in adjusting the droop coefficient for headroom reserve control. Insufficient values risk instability, while excessive values may introduce overshooting problems. This analysis underscores the importance of carefully tuning the parameter within the plant control system. Finding an optimal balance is crucial to ensuring the stability and performance of the REGM (REPC-A). The insights derived from this observation contribute to a deeper understanding of the dynamic behavior of the system under varying droop coefficient conditions.
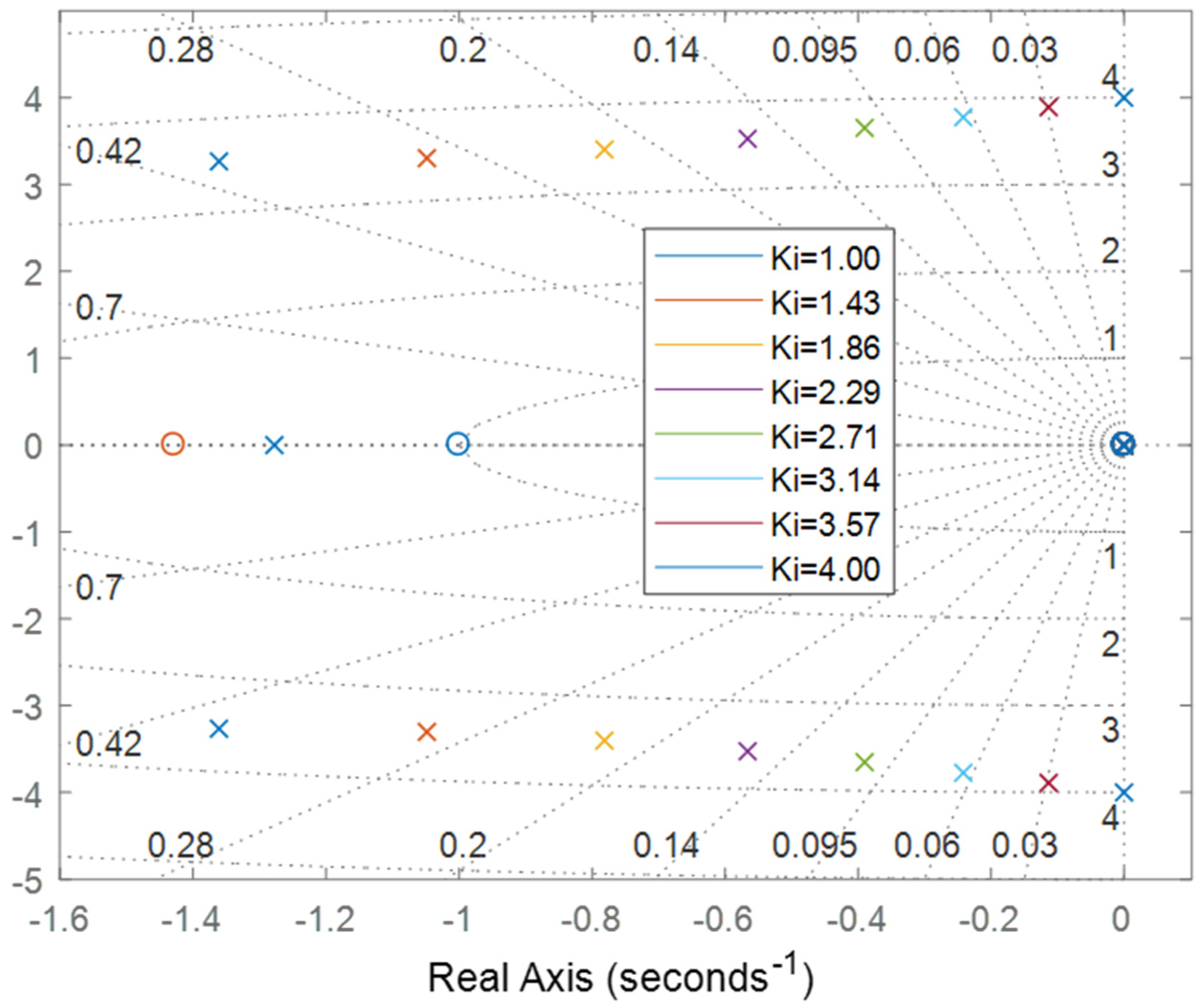
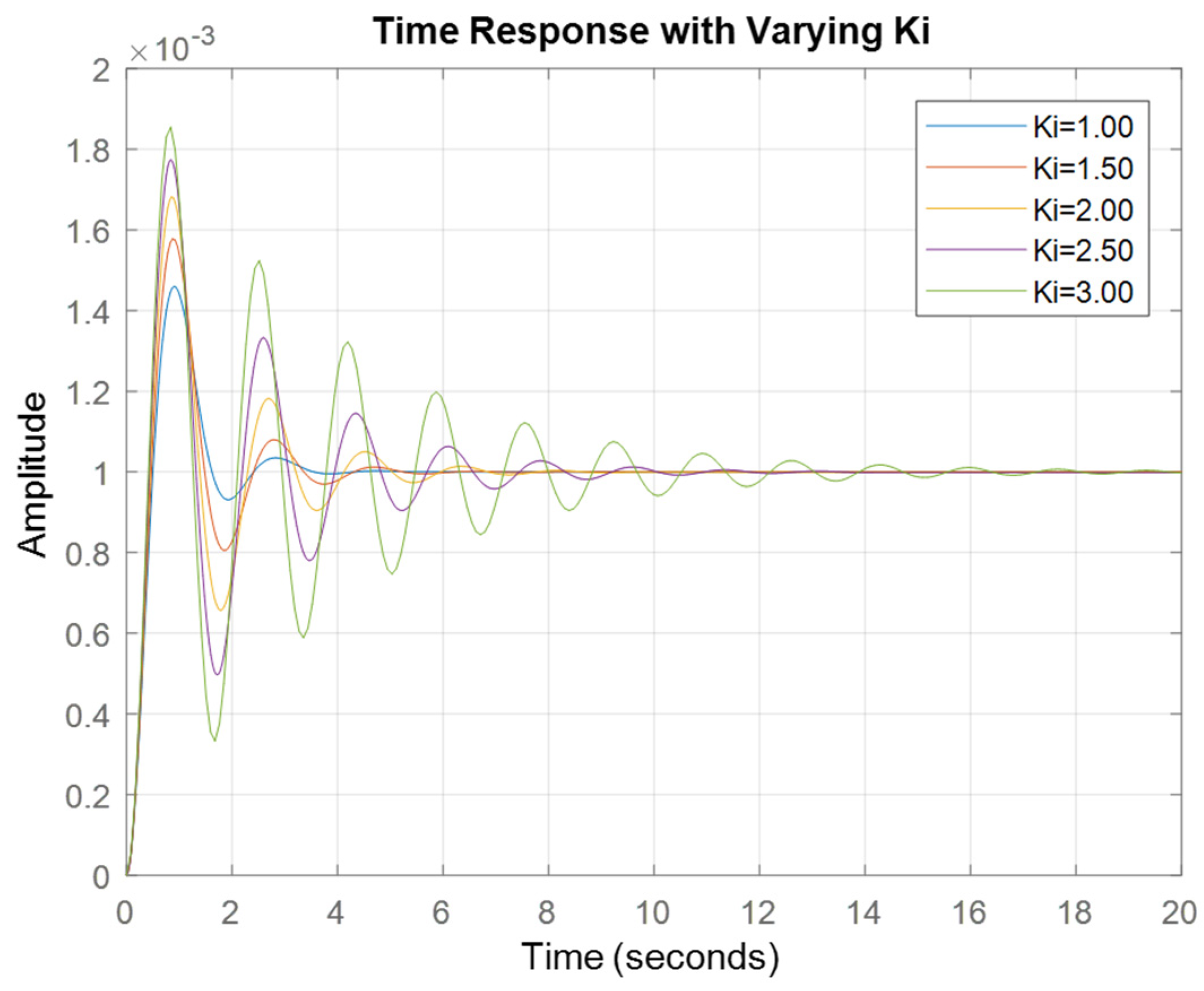
Examining
Figure 7 reveals a distinctive trend: as the parameter
increases, there is a clear shift of the pole point toward the right side. This shift signifies that, under high integral gain conditions, the pole of the plant control (REPC-A) is positioned within the unstable region. This observation raises significant concerns regarding system stability, particularly when operating with elevated integral gain values. The relocation of the pole to the right side highlights the intricate balance required within the plant control system. Elevated integral gain values have the potential to induce instability, posing challenges to the overall performance of the REGM (REPC-A). The dynamic response, illustrated by the movement of the pole, underscores the sensitivity of the control system to variations in the integral gain parameter. As described in
Figure 8, this insight underscores the critical importance of meticulous tuning of the
parameter within the plant control system.
4. Simulation Results
PSCAD with the IEEE 9-bus test system is used to verify these models, with a detailed explanation of the test system and scenarios provided in
Appendix A. The fundamental reason for proposing PSCAD Version 5 (EMT software) is its pivotal role in power system modeling and control, offering indispensable capabilities for engineers navigating the intricacies of electrical grids. Unlike RMS (Root Mean Square) software such as PSSE Version 33, which predominantly focuses on steady-state analysis, EMT software specializes in capturing the nuances of transient events and electromagnetic phenomena with unparalleled accuracy. This precision is crucial for comprehending system behavior during rapid transients, fault occurrences, and dynamic responses to disturbances.
Furthermore, as mentioned in the first section, PSCAD (EMT software) is renowned for its robustness in capturing system responses during transient periods. However, it encounters limitations when dealing with large network sizes due to computational constraints, leading to longer computation times and increased memory requirements. One fundamental reason behind this limitation lies in the nature of EMT simulations. EMT simulations necessitate small time steps to accurately capture fast-changing phenomena, such as transient events and electromagnetic transients. As the size of the simulated network increases, the number of system components and interactions grows exponentially, demanding finer time steps to maintain accuracy. Consequently, this exponentially increases the computational burden and memory requirements, making simulations of large bus systems impractical with conventional computational resources. Despite its prowess in capturing transient behavior, this inherent limitation of EMT simulations underscores the need for careful consideration of system size and computational resources when utilizing PSCAD/EMT for power system analysis and design.
WECC Generic Model with Droop Validation
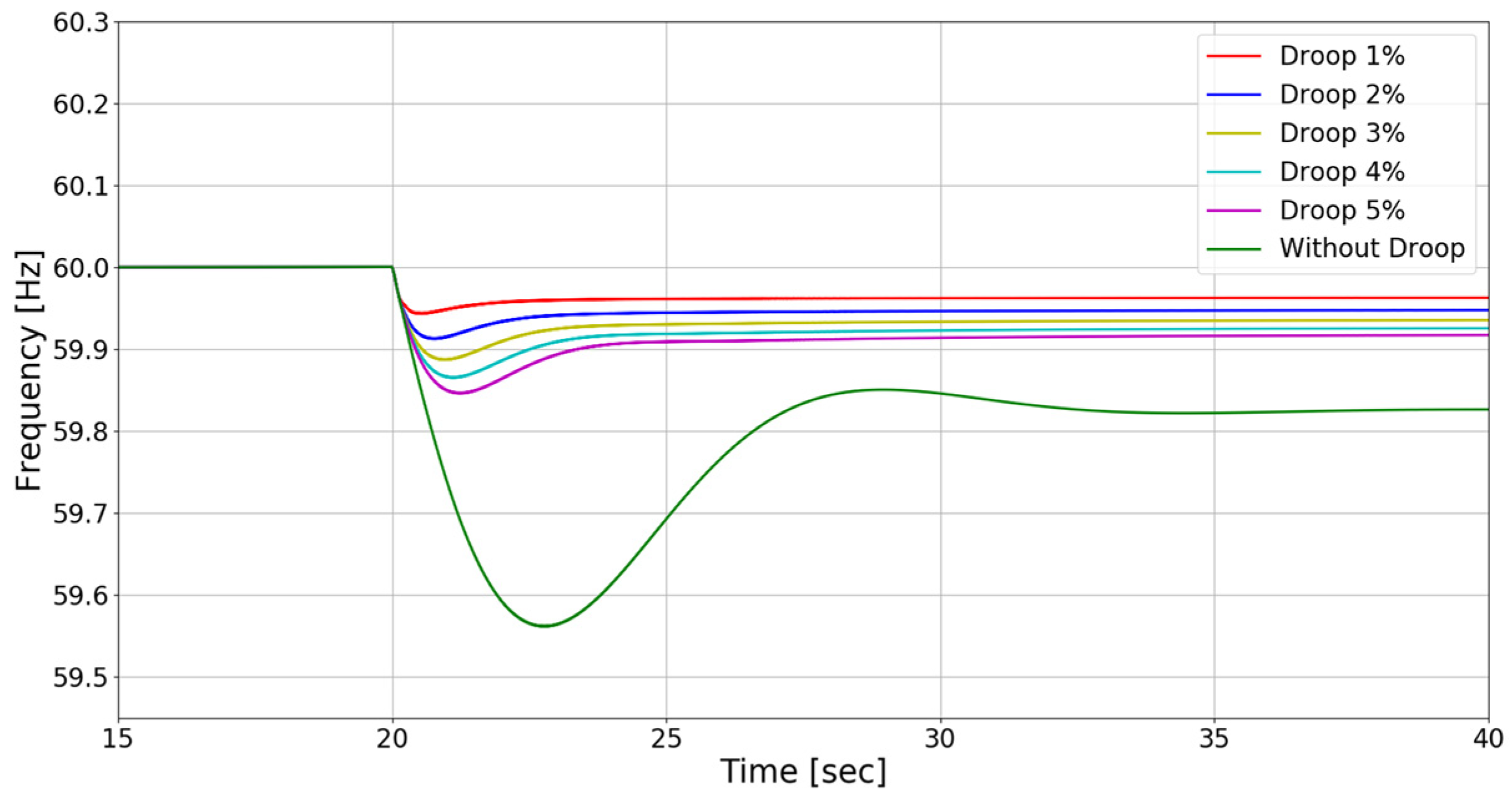
In
Figure 9, the frequency response graph provides a dynamic representation of how the system’s frequency evolves over time following a disturbance. Each line on the graph, distinguished by different colors, corresponds to specific droop settings, ranging from 1% to 5%, in addition to a scenario where droop control is not applied. Droop control, a sophisticated method widely employed in power systems, plays a crucial role in stabilizing frequency by adjusting the power output of generators in response to fluctuations in frequency. Examining the graph in detail, it becomes apparent that as the droop setting increases, the system’s frequency exhibits a more rapid recovery to its nominal value after the initial dip. The line representing the system with a 5% droop setting stands out, showing the least deviation and the quickest recovery, closely followed by the 4% setting, and so on. This progression underscores the incremental effectiveness of higher droop settings in enhancing the system’s frequency stability. Conversely, the scenario labeled “Without Droop” starkly contrasts with the controlled settings, revealing a more substantial frequency deviation. This stark difference emphasizes the vital role played by droop control in dampening frequency swings and expediting the return of the system to its nominal frequency. The visual representation in
Figure 9 serves as a compelling testament to the efficacy of droop control mechanisms in ensuring the stability and resilience of power systems. In the realm of droop control, elevating the droop settings results in a more rapid and prominent surge in active power, thereby enhancing the pace of frequency restoration, as depicted in
Figure 10. Conversely, the absence of droop control in the system results in a delayed and less efficient response in active power, consequently leading to subpar frequency recovery.
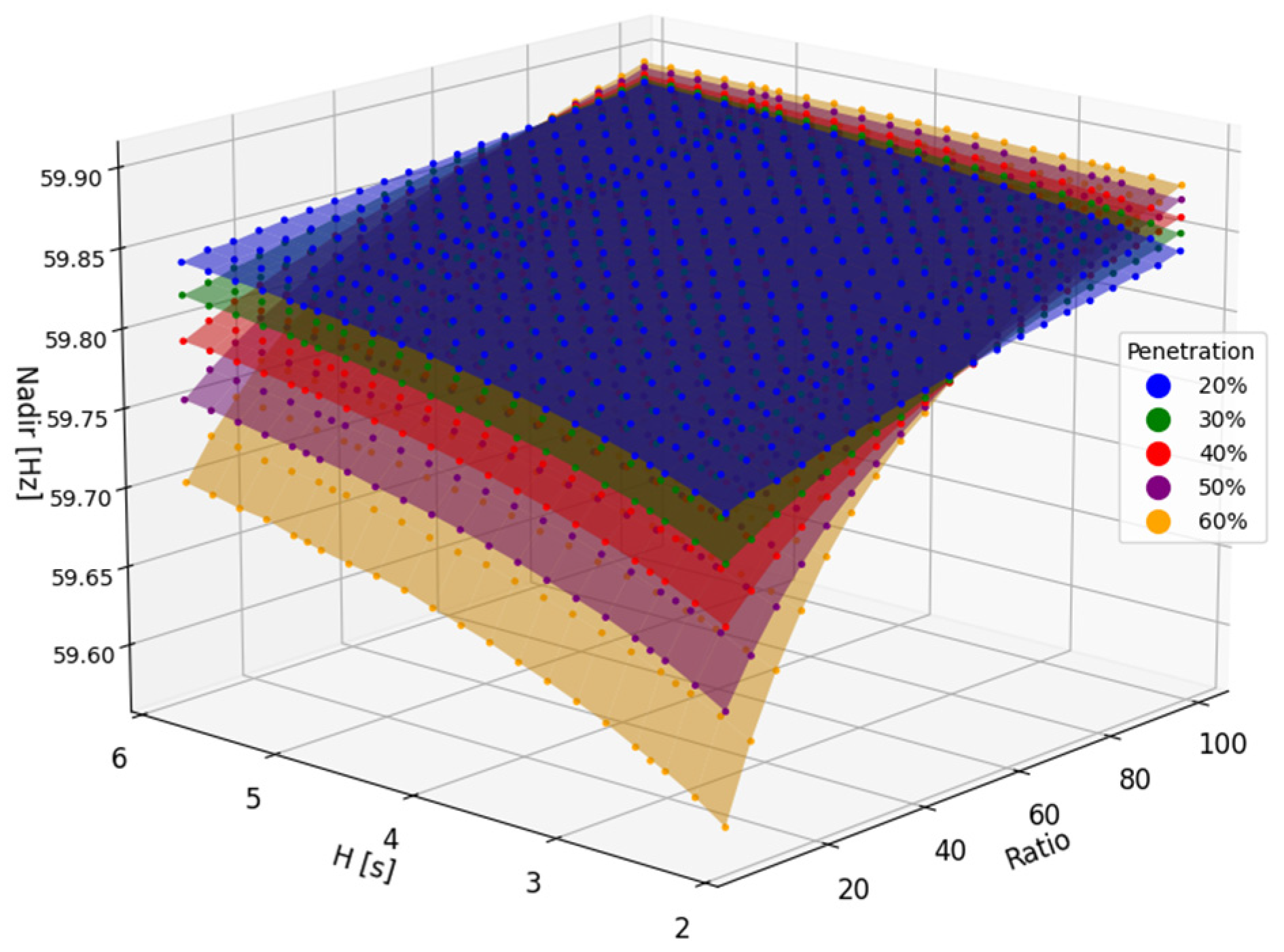
As the renewable energy penetration within the system undergoes a gradual reduction from 60% to 20%, a discernible trend emerges, revealing a noteworthy enhancement in frequency stability. This unfolding pattern provides a nuanced glimpse into the intricate dynamics governing the power grid, underscoring the evolving relationship between conventional and renewable energy sources. The observed improvement implies a lasting influence of traditional synchronous generators, which, despite yielding precedence to the ascendancy of renewable sources, continue to exert a substantial impact on the overall stability of the system. This transitional phase invites a deeper exploration of the harmonious coexistence and collaboration between these disparate energy components, unraveling the subtleties of their interplay. Delving into the intricate fabric of system components, an intriguing narrative unfolds concerning the ratio between grid-forming and WECC generic models. Particularly intriguing is the subtlety of this ratio’s impact at lower levels of renewable penetration, suggesting an inherent adaptability and resilience in the face of changing energy landscapes. This resilience appears to be rooted in the sophisticated capabilities of grid-forming inverters, which showcase a remarkable ability to sustain system stability even amidst a less challenging renewable energy environment. As renewable penetration intensifies, the proportional influence of this ratio gains prominence, signifying an adaptive equilibrium between grid-forming technologies and the evolving energy matrix.
Additionally, the diminishing effect of inertia on frequency stability at lower renewable penetrations introduces a captivating layer of analysis. This trend, which may be attributed to the reduced necessity for synthetic inertia or rapid frequency response mechanisms in environments with lower renewable energy shares, underscores the sustained contribution of synchronous generators to the system’s intrinsic resilience. The comprehensive elucidation of these intricate dynamics, spanning the spectrum of renewable penetrations, is meticulously documented in
Figure 10. These visual representations offer a granular exploration of the multifaceted relationship between renewable energy integration, the enduring role of synchronous generators, the nuanced influence of grid-forming models, and the evolving significance of inertia in shaping the intricate landscape of system frequency stability. Such a detailed analysis provides valuable insights into the adaptive responses and collaborative dynamics that characterize the evolving power grid in the face of changing energy paradigms.
Droop control within WECC Generic Models is tailored to regulate output power in reaction to deviations in frequency.
Figure 11 provides a comparison illustrating the variance in frequency nadir response with a 1% droop, indicating superior performance compared to scenarios with higher droop settings, particularly when considering the penetration of Inverter-Based Resources (IBRs).
In contexts of high inertia, it suggests a greater proportion of traditional synchronous generation in relation to the overall generation capacity, thereby fostering a stabilizing influence. In such scenarios, where the ratio of GFM inverters is low, the frequency response primarily relies on the inertia of synchronous generators. The substantial inertia enables these generators to absorb disturbances more effectively, resulting in reduced fluctuations in the frequency nadir across different droop settings. Essentially, the high inertia mitigates the impact of droop settings on frequency response. However, when IBR penetration reaches 60% with low inertia and a low ratio of GFM control, the frequency nadir becomes vulnerable. Furthermore, with a 1% droop, the injected power aligned with the droop control appears to reach a saturation point around 59.96 Hz. This saturation is attributed to the bandwidth of the droop control, set at 0.036 Hz.
At lower inertia levels, the system exhibits heightened sensitivity to these adjustments, amplifying the discernible effects of various droop settings. Low-droop settings have the potential to elevate and render system frequencies fluctuant due to heightened sensitivity toward power imbalances.
Figure 12 and
Figure 13 illustrate different scenarios of Inverter-Based Resource (IBR) penetration variations alongside droop settings of 3% and 5%. In particular,
Figure 12 highlights that a low-droop setting results in significant power output changes in response to minor frequency deviations. This aggressive control response may impede the system’s ability to attain a new equilibrium, particularly when confronted with fluctuations in load conditions or disturbances. Conversely, a larger droop value signifies less fluctuation in power output for a given frequency deviation, yet it may result in larger frequency deviations overall. On the other hand, a smaller droop value triggers more substantial changes in power output for a given frequency deviation, with the aim of aggressively stabilizing the frequency.
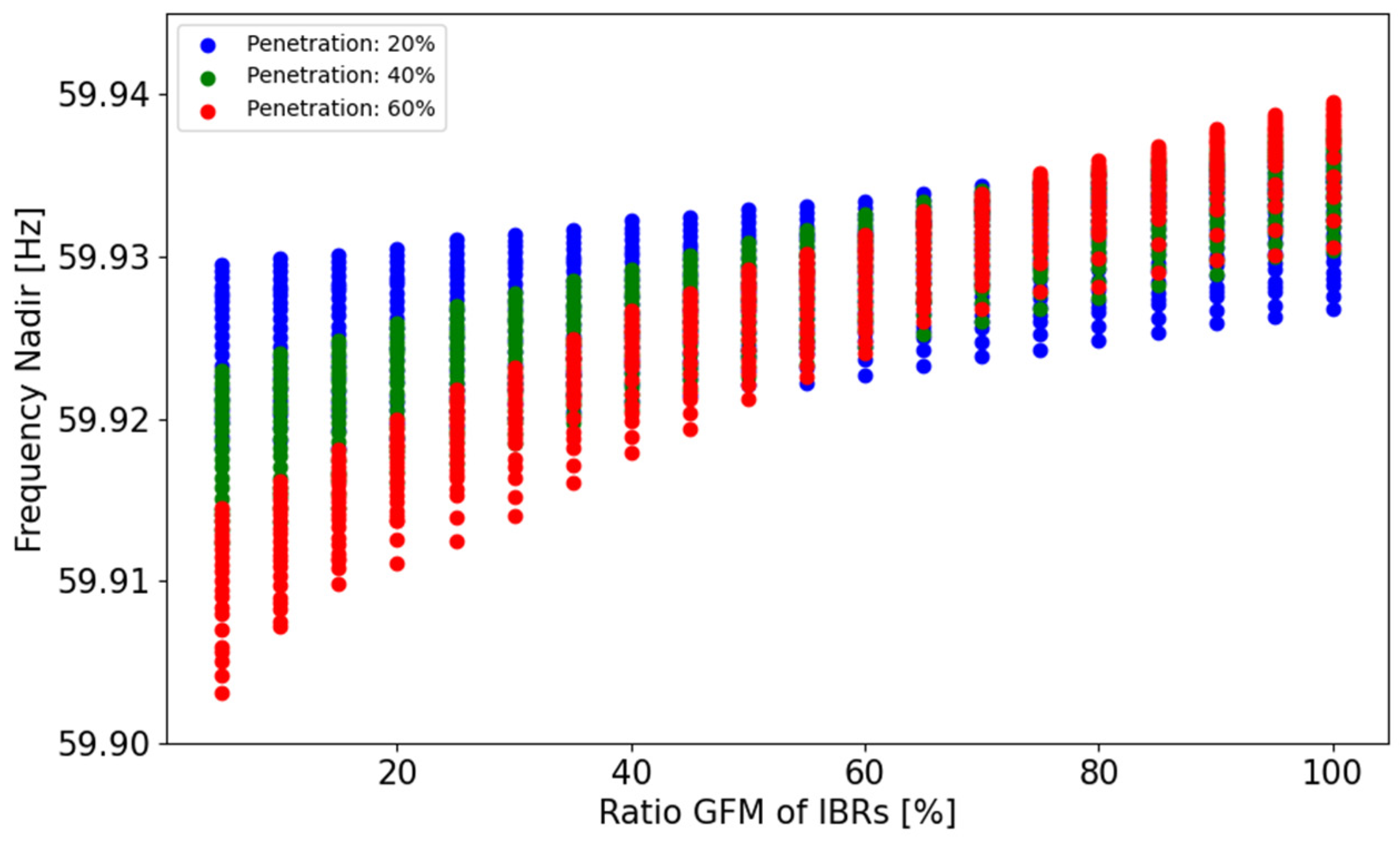
In
Figure 14, which presents a comparison between frequency nadir and GFM ratios at various IBR penetration levels, we observe that even with a droop setting of 3%, GFM control can still improve the system’s frequency nadir. With an IBR penetration of 20%, the frequency nadir tends to become more pronounced and stable, even if the grid-forming mode (GFM) is in a lower ratio compared to the grid-following mode (GFL). As the penetration level increases, more sensitive responses are observed. For instance, with an IBR penetration of 60%, the frequency nadir improves when the GFM ratio exceeds that of GFL. However, this also impacts the system’s aggressiveness. Consequently, when the GFM ratio is lower, the frequency nadir decreases accordingly.
6. Conclusions
This study aimed to evaluate the impacts of IBR penetration on grid stability, focusing on GFM and GFL using the WECC generic model. Additionally, the study was analyzed through PSCAD (EMT software) for advanced transient analysis, incorporating the generator equivalent concept to describe large-scale IBR penetration into the grid. Various grid parameters, such as inertia, IBR penetration, and GFM−GFL ratio, were proposed to determine the optimal GFM capacity ratio using the least squares method in power system operations. The simulation results confirm that while GFL inverters with grid support functions can provide limited frequency support, especially when IBR penetration exceeds 50%, the combined effect of small-scale GFM inverters can significantly enhance the primary frequency response of the bulk power grid. The conclusion emphasizes the relationship between IBR penetration rates, system inertia settings, and their impacts on grid stability. It addresses the specific aspects of penetration and inertia variations, covering the objectives, results, limitations, and future research directions related to these factors. Moreover, the study suggests that if IBR penetration reaches 60%, limiting the proportion of GFL inverters to around 35% is necessary to maintain system stability. The developed least squares method equation can also predict frequency nadir in large-scale simulations by varying system inertia and GFM ratios. For future research, various outer loop grid-forming control strategies should be explored to mitigate operational challenges in weak grids.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}