

Research on Sliding Mode Variable Structure Model Reference Adaptive System Speed Identification of Bearingless Induction Motor

Abstract
1. Introduction
2. VS-MRAS Speed Identification Method
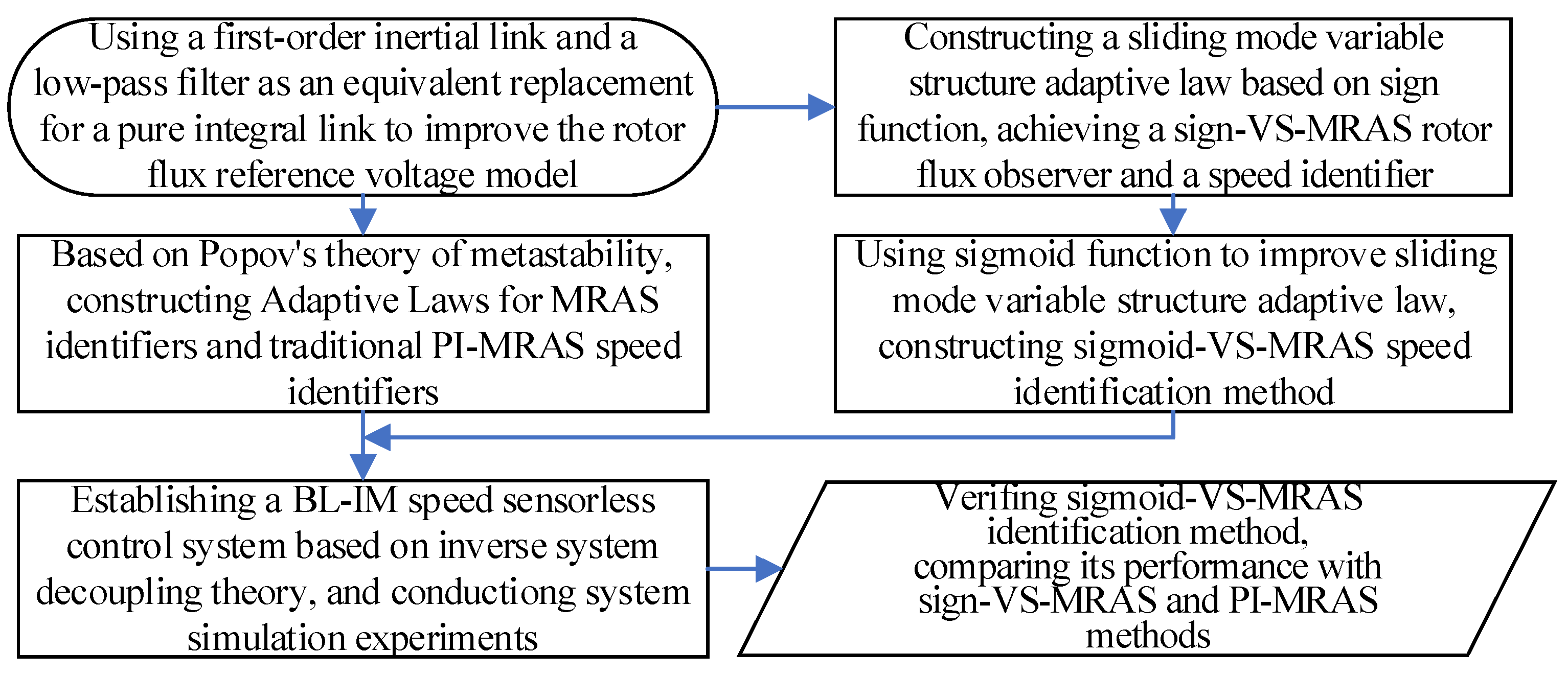
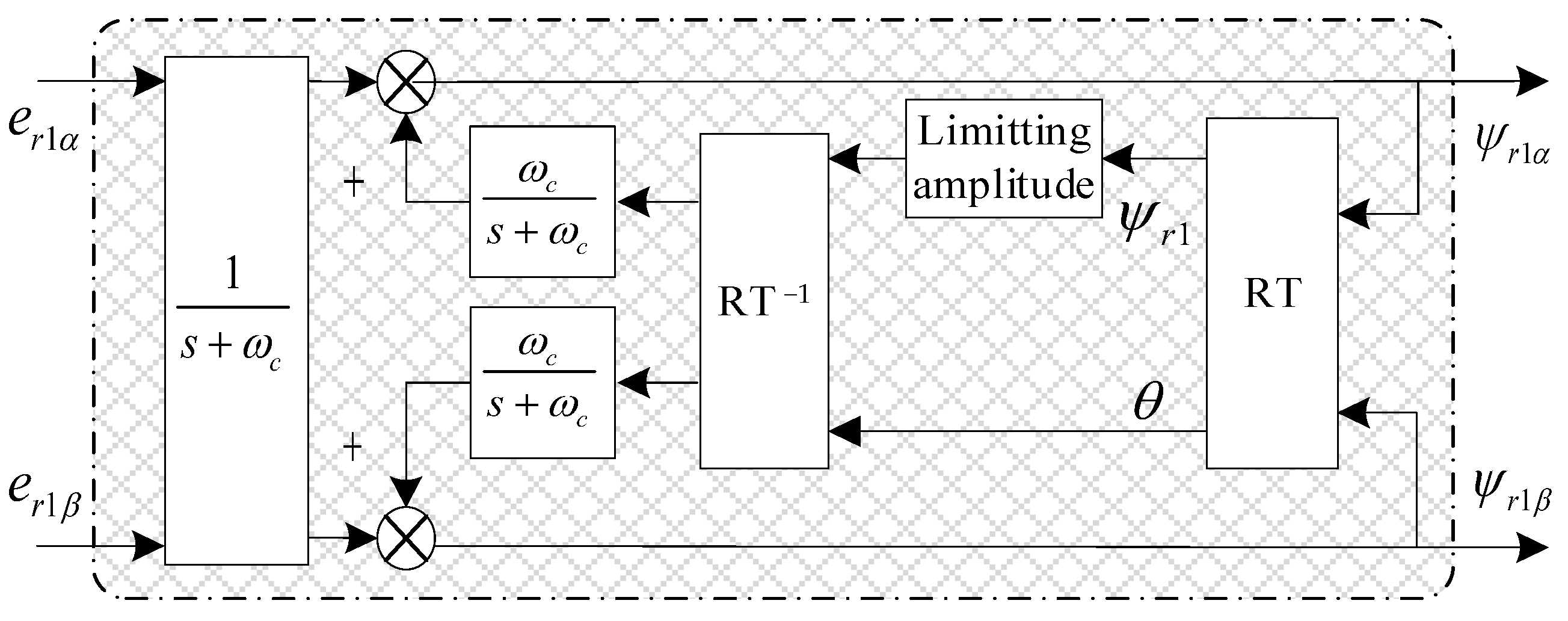
2.1. Improvement of Rotor Flux-Linkage Model for MRAS Speed Identifier
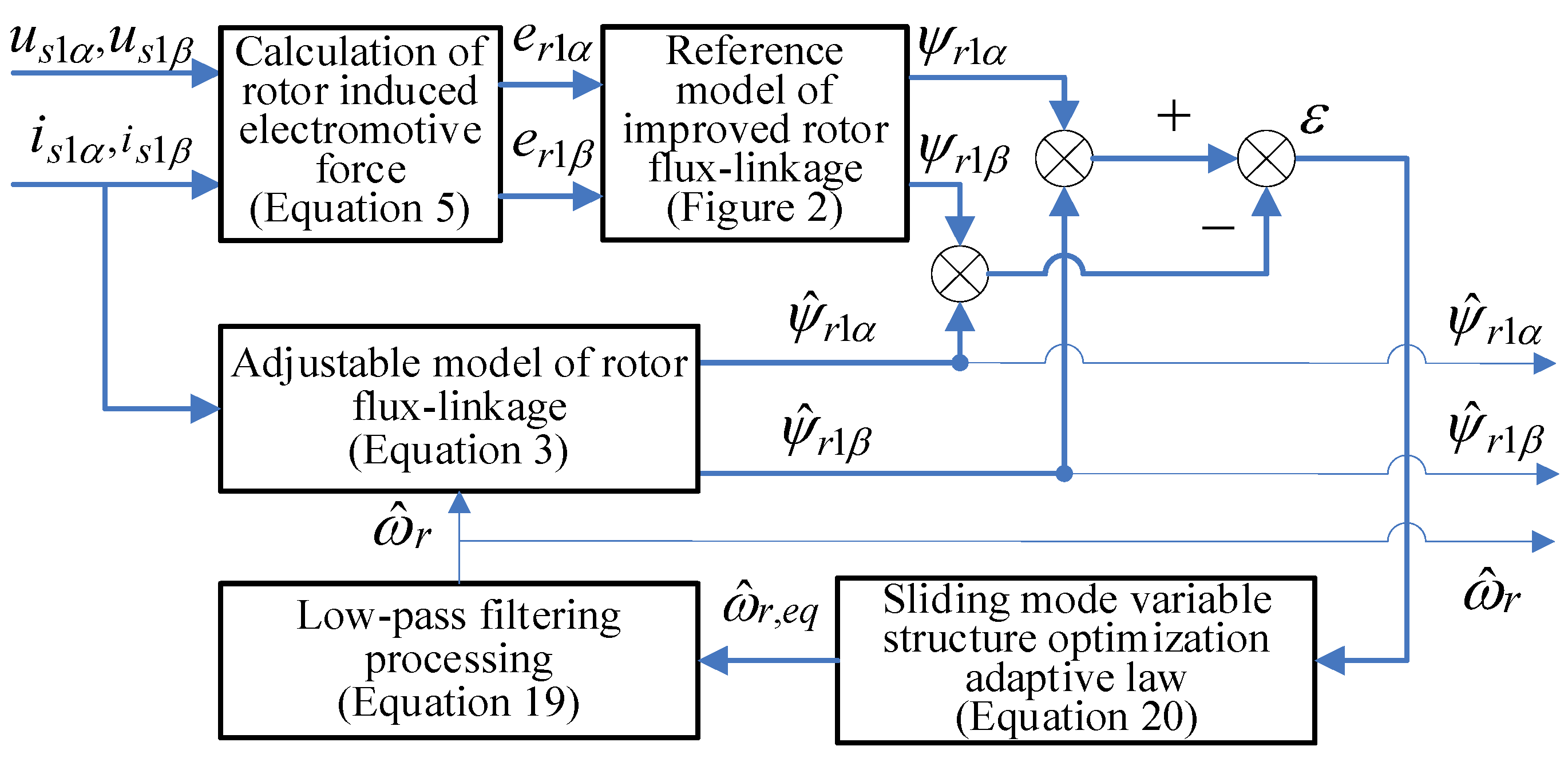
2.2. VS-MRAS Speed Identification
2.2.1. Sliding Mode Variable Structure Idea
2.2.2. Construction of Switching Functions
2.2.3. Existence and Arrival Conditions of Sliding Modes
2.2.4. Relationship between Identification Speed and Actual Speed
2.2.5. Optimization of the Sliding Mode Variable Structure Adaptive Law
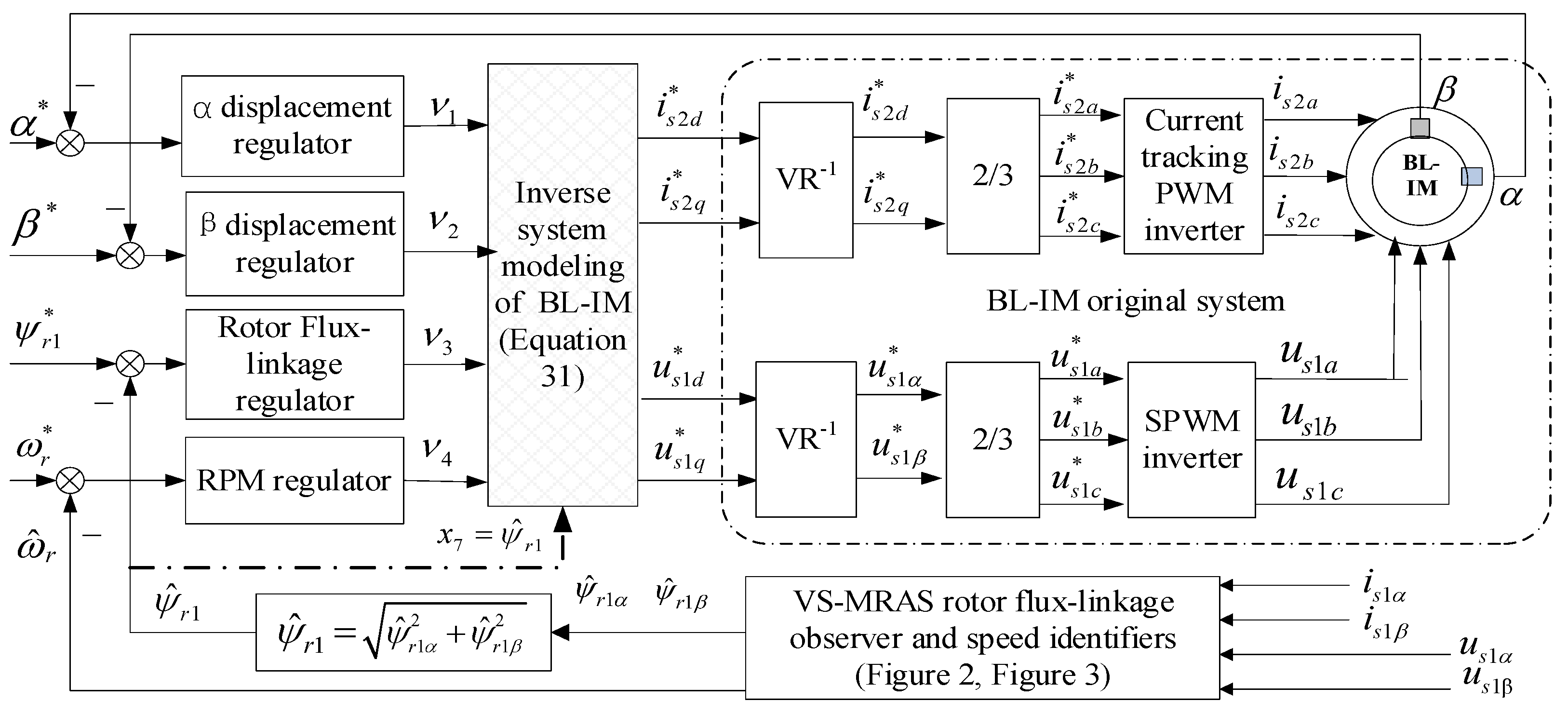
3. Speed Sensorless Inverse Decoupling Control System of a BL-IM
4. Speed Sensorless Control System Simulation Verification and Analysis
- (1)
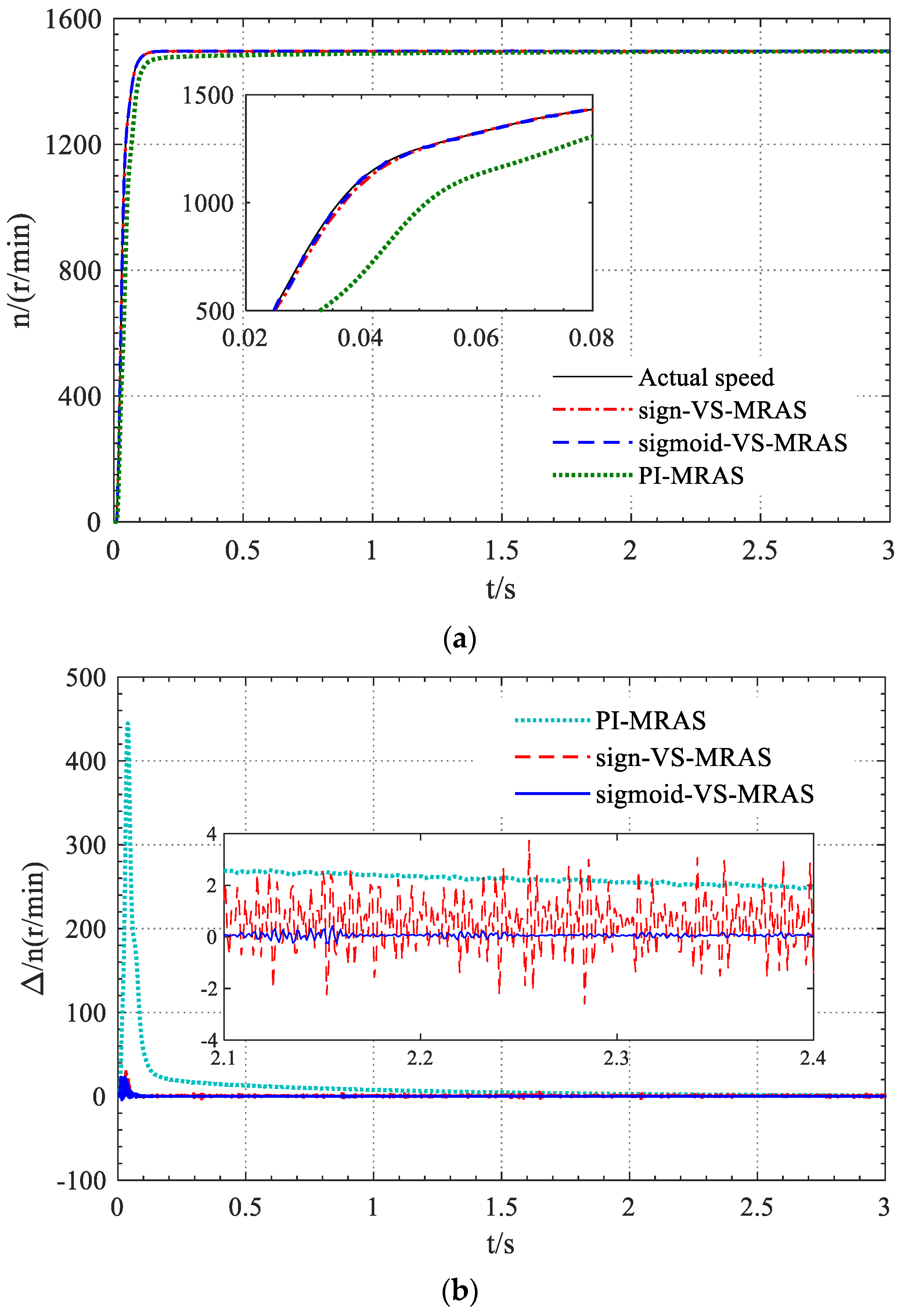
- Compared with the traditional PI-MRAS speed identification method, the “sigmoid-VS-MRAS” speed identification method can achieve timely tracking of speed during motor starting, and the steady-state error is small. Mainly due to the influence of the pure integration link on the reference model of the traditional PI-MRAS method, the reliability of the reference model is reduced, especially at low speeds. The “sigmoid-VS-MRAS” method has improved the reference model, improved its reliability, and adopted a sliding mode variable structure optimization adaptive law to improve the response speed and robustness of speed identification; therefore, the tracking accuracy and rapidity of motor speed have been greatly improved, and the steady-state error is smaller.
- (2)
- Because the sliding mode variable structure adaptive law improves the response rapidity of MRAS speed identification, both “sigmoid-VS-MRAS” and “sign VS-MRAS” methods can achieve faster speed tracking effects. However, when using “sign-VS-MRAS”, there are high-frequency harmonics or oscillations with an amplitude of about 3.0 r/min in the identified motor speed. The reason for this is the rapid switching and switching time delay of discontinuous switching functions. When using the “sigmoid-VS-MRAS” speed identification method proposed in this paper, the chattering phenomenon is significantly suppressed, and the high-frequency harmonics in the identified speed are greatly suppressed. Except for a small amount of identification error at the startup moment, high identification accuracy and high tracking rapidity can be achieved during the startup process and steady-state operation.
- (1)
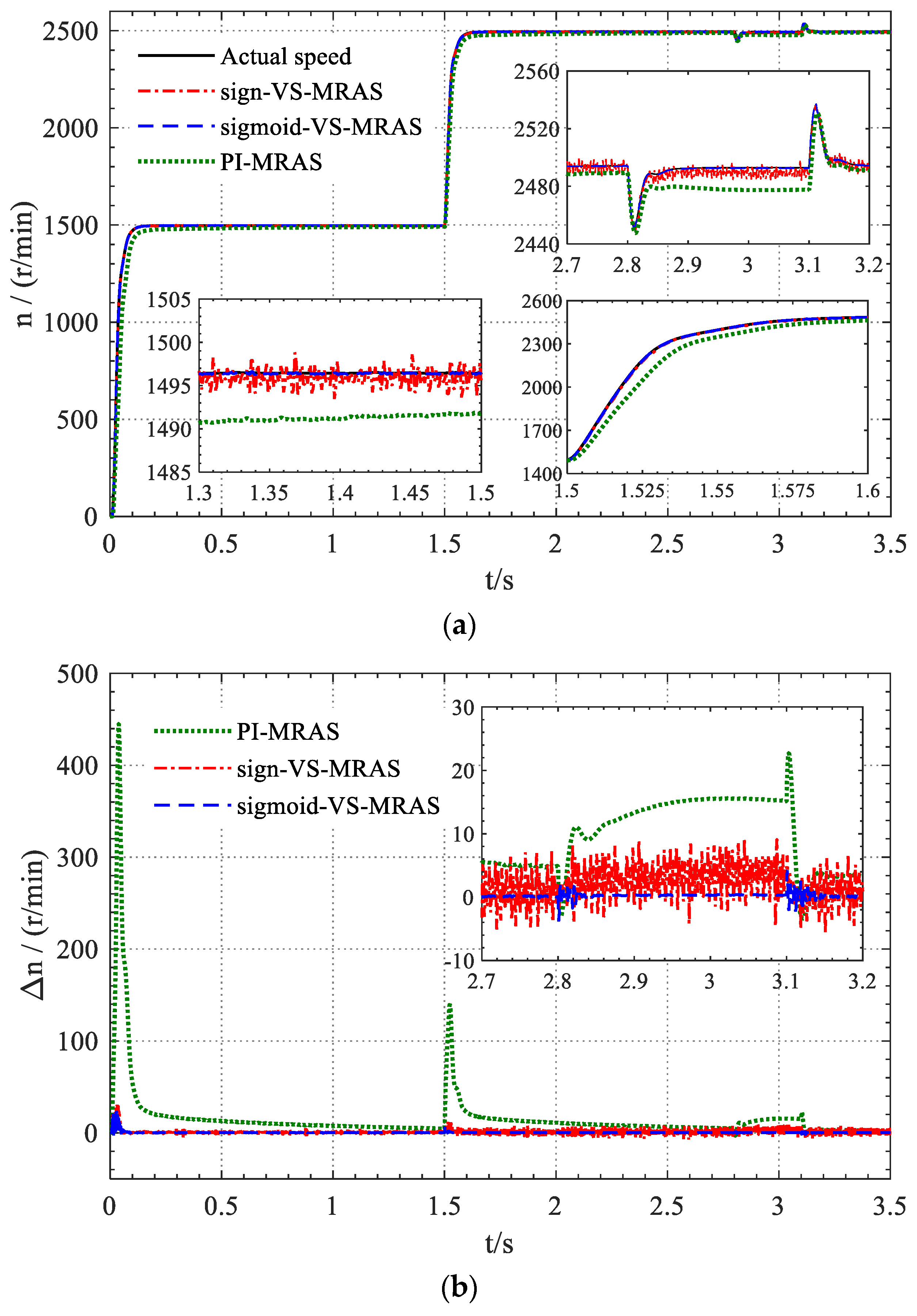
- During on-load operation and speed regulation processes, the “sigmoid-VS-MRAS” speed identification method can still achieve higher identification and tracking performance than the PI MRAS method. Compared to the “sign-VS-MRAS” method, it still overcomes the chattering problem; moreover, the identified speed basically does not contain higher harmonics, and it still has a higher speed identification accuracy.
- (2)
- Under the same load sudden change conditions, when using the traditional PI-MRAS method, there was a speed drop deviation of about 20 r/min, and the speed recovery process was relatively slow. When using the “sign-VS-MRAS” method, due to the fast nature of sliding mode variable structure control, only a small speed fluctuation of about 5 r/min was generated. When using the proposed “sigmoid-VS-MRAS” method, not only can the motor speed recover to its original stable state within 0.05 s, but also, due to the high identification accuracy of the “sigmoid-VS-MRAS” method, the BL-IM system can still achieve higher speed control accuracy than that case when using the “sign-VS-MRAS” method. After loading, the steady-state speed of the BL-IM system can still be maintained at zero deviation.
- (1)
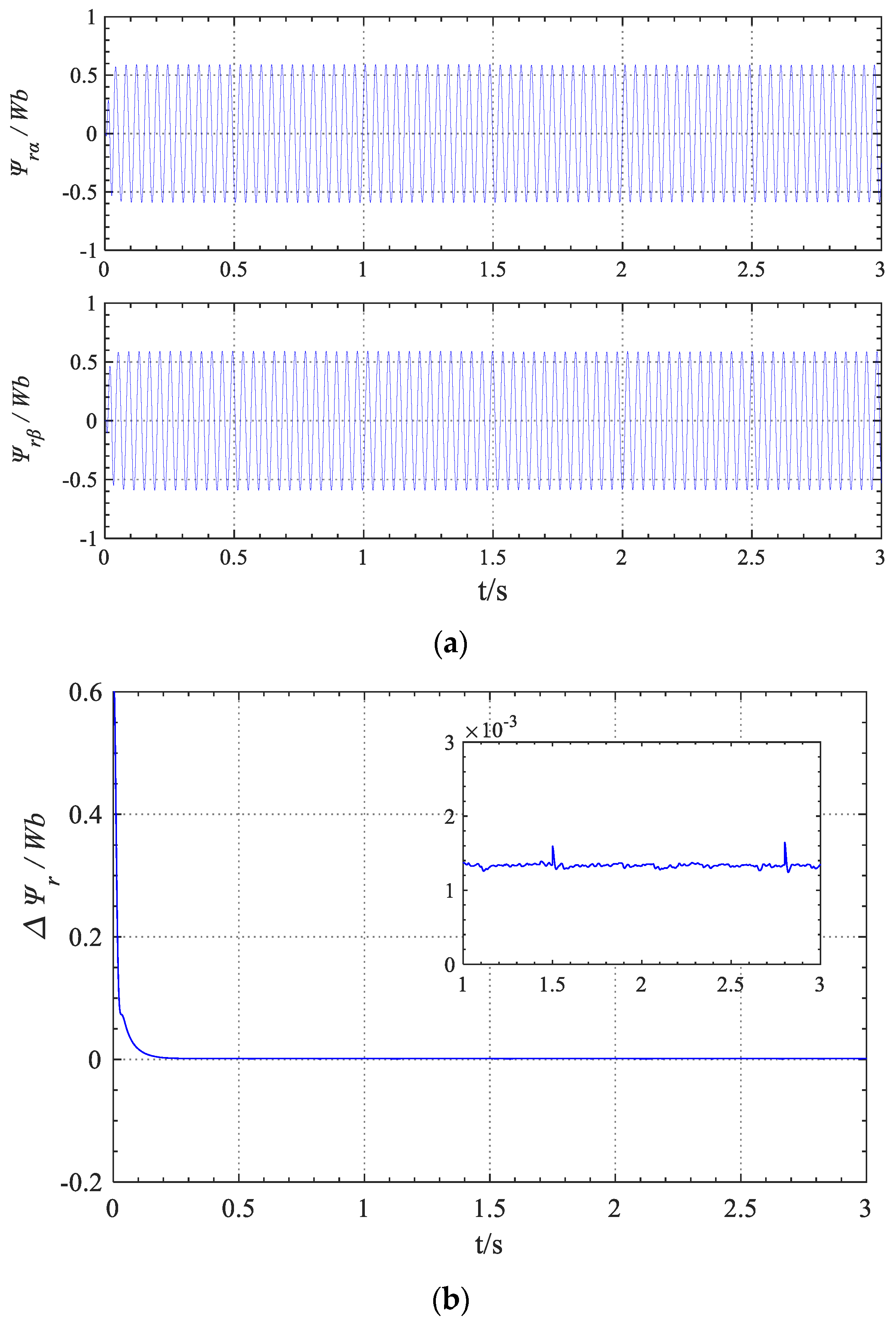
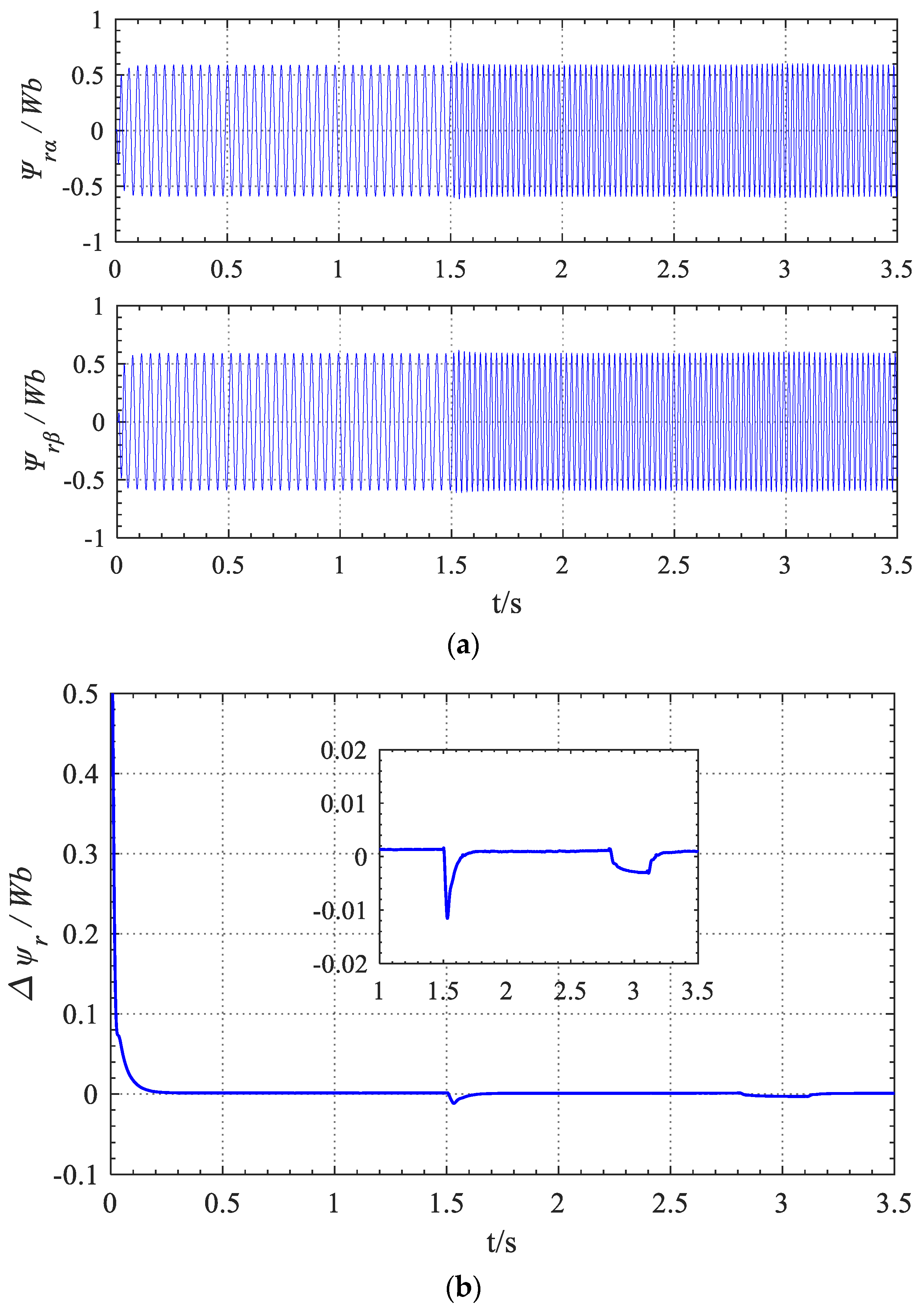
- After using the “sigmoid-VS-MRAS” speed identifier proposed in this paper, the radial displacement component of the rotor is basically not affected by the sudden changes in load and speed. At the same time, when the radial displacement of the rotor suddenly changes, it has an instantaneous slight overshoot of about 0.02 mm, and the motor speed and the rotor flux-linkage are also basically unaffected.
- (2)
- Based on the inverse dynamic decoupling control system of BL-IM [10], after replacing the mechanical speed sensor with the proposed “sigmoid-VS-MRAS” speed identifier, stable maglev operation control can still be achieved; moreover, the speed sensorless control system can still achieve good dynamic and static decoupling control performance.
5. Conclusions
- (1)
- After improving the rotor flux-linkage reference model with an equivalent integration link, the influence of the initial value and cumulative error of the integrator can be effectively eliminated, and higher rotor flux-linkage observation accuracy can be achieved. On this basis, it can effectively improve the reliability and accuracy of speed identification.
- (2)
- Because it inherits the fast control characteristics of sliding mode control, when using the sliding mode variable structure adaptive law to replace the traditional PI adaptive law, the rapidity of speed identification and tracking can be effectively improved, and stronger resistance to load disturbances can be obtained.
- (3)
- After replacing the symbol function with the sigmoid function that has smooth and continuous characteristics, the sliding mode variable structure adaptive rate can be significantly improved, and the high-order harmonic problem caused by sliding mode chattering in the identification speed waveform can be effectively reduced, thus effectively improving the speed identification accuracy and obtaining better steady-state and dynamic speed identification and tracking performance.
- (4)
- After updating the relevant variables in the inverse system model with the observed rotor flux-linkage in real time and replacing the mechanical speed sensor with the proposed sigmoid-VS-MRAS speed identifier, not only the stable operation control of the inverse decoupling control system of BL-IM can be achieved, but good steady-state and dynamic decoupling control performance between speed system and suspension system can also still be obtained.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nielsen, K.K.; Bahl, C.R.H.; Dagnaes, N.A.; Santos, I.F.; Bjork, R. A Passive Permanent Magnetic Bearing with Increased Axial Lift Relative to Radial Stiffness. IEEE Trans. Magn. 2021, 57, 8300108. [Google Scholar] [CrossRef]
- Pei, T.; Li, D.; Liu, J.; Li, J.; Kong, W. Review of Bearingless Synchronous Motors: Principle and Topology. IEEE Trans. Transp. Electrif. 2022, 8, 3489–3502. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, J.; Severson, E.L. Review of Bearingless Motor Technology for Significant Power Applications. IEEE Trans. Ind. Appl. 2020, 56, 1377–1388. [Google Scholar] [CrossRef]
- Sun, X.; Jin, Z.; Cai, Y.; Yang, Z.; Chen, L. Grey Wolf Optimization Algorithm Based State Feedback Control for a Bearingless Permanent Magnet Synchronous Machine. IEEE Trans. Power Electron. 2020, 35, 13631–13640. [Google Scholar] [CrossRef]
- Bao, X.; Wang, X.; Ding, Q.; Shi, T. Design of Double Staggered Parallel Bearingless Motor Drive System. IEEE Trans. Power Electron. 2023, 38, 2230–2239. [Google Scholar] [CrossRef]
- Wang, Z.; Cao, X.; Deng, Z.; Cai, J.; Deng, X. High Integrated Methodology and Evaluation for Switched-Reluctance Type Bearingless Motors with Five Degree of Freedom Magnetic Levitation. IEEE Trans. Energy Convers. 2023, 38, 759–770. [Google Scholar] [CrossRef]
- Chen, Y.; Bu, W.; Qiao, Y. Research on the Speed Sliding Mode Observation Method of a Bearingless Induction Motor. Energies 2021, 14, 864. [Google Scholar] [CrossRef]
- Cao, J.; Sun, X.; Tian, X. Optimal control strategy of state feedback control for surface-mounted PMSM drives based on auto-tuning of seeker optimization algorithm. Int. J. Appl. Electromagn. Mech. 2021, 66, 705–725. [Google Scholar] [CrossRef]
- Bu, W.; Li, B.; He, F.; Li, J. Inverse system decoupling sliding mode control Strategy of Bearingless Induction Motor Considering Current Dynamics. Int. J. Appl. Electromagn. Mech. 2019, 60, 63–78. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, D.; Sun, X.; Wu, J. Speed sensorless control of a bearingless induction motor with combined neural network and fractional sliding mode. Mechatronics 2022, 82, 102721. [Google Scholar] [CrossRef]
- Sun, C.; Yang, Z.; Sun, X.; Ding, Q. An Improved Mathematical Model for Speed Sensorless Control of Fixed Pole Bearingless Induction Motor. IEEE Trans. Ind. Electron. 2024, 71, 1286–1295. [Google Scholar] [CrossRef]
- Bu, W.S.; Zu, C.L.; Wang, S.J. MRAS Speed Identification of Bearingless Induction Motor Based on Rotor Flux Orientation. Control. Eng. China 2014, 21, 334–337, 342. [Google Scholar]
- Rao, P.N.; Kumar, N.M.; Padmanaban, S.; Subathra, M.S.P.; Chand, A.A. A Novel Sensorless Approach for Speed and Displacement Control of Bearingless Switched Reluctance Motor. Appl. Sci. 2020, 10, 4070. [Google Scholar] [CrossRef]
- Zhao, Q.; Yang, Z.; Sun, X.; Ding, Q. Speed-sensorless control system of a bearingless induction motor based on iterative central difference Kalman filter. Int. J. Electron. 2020, 107, 1524–1542. [Google Scholar] [CrossRef]
- Bian, Y.; Yang, Z.; Sun, X.; Wang, X. Speed Sensorless Control of a Bearingless Induction Motor Based on Modified Robust Kalman Filter. J. Electr. Eng. Technol. 2024, 19, 1179–1190. [Google Scholar] [CrossRef]
- Wang, G.; Yang, L.; Zhang, G.; Zhang, X.; Xu, D. Comparative Investigation of Pseudorandom High-Frequency Signal Injection Schemes for Sensorless IPMSM Drives. IEEE Trans. Power Electron. 2017, 32, 2123–2132. [Google Scholar] [CrossRef]
- Xu, T.; Yang, Z.; Sun, X.; Jia, J. Speed sensorless control of a bearingless induction motor based on fuzzy PI fractional MRAS scheme. Int. J. Green Energy 2022, 19, 389–398. [Google Scholar] [CrossRef]
- Sun, Y.Q.; Yang, Z.B.; Sun, X.D.; Sun, C. Speed sensorless control of a BL-IM based on an adaptive nonsingular terminal sliding mode observer. Int. J. Electron. 2023, 110, 341–359. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, Q.; Sun, X.; Lu, C.; Zhu, H. Speed sensorless control of a bearingless induction motor based on sliding mode observer and phase-locked loop. ISA Trans. 2022, 123, 346–356. [Google Scholar] [CrossRef] [PubMed]
- Holakooie, M.H.; Ojaghi, M.; Taheri, A. Modified DTC of a Six-Phase Induction Motor with a Second-Order Sliding-Mode MRAS-Based Speed Estimator. IEEE Trans. Power Electron. 2019, 34, 600–611. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Torque System | Levitation System |
|---|---|---|
| Stator resistance | 1.6 Ω | 2.7 Ω |
| Stator leakage-inductance | 0.0043 H | 0.00398 H |
| Rotor resistance | 1.423 Ω | 2.344 Ω |
| Rotor leakage-inductance | 0.0043 H | 0.00398 H |
| Single-phase excitation inductance | 0.0859 H | 0.230 H |
| Power | 2.2 kW | - |
| Inner radius of stator | 62 mm | |
| Length of rotor core | 82 mm | |
| Average air gap of motor | 0.6 mm | |
| Clearance of auxiliary bearings | 0.2 mm | |
| Rotor inertia | 0.024 kg·m2 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bu, W.; Tao, W.; Chen, Y. Research on Sliding Mode Variable Structure Model Reference Adaptive System Speed Identification of Bearingless Induction Motor. Energies 2024, 17, 2615. https://doi.org/10.3390/en17112615
Bu W, Tao W, Chen Y. Research on Sliding Mode Variable Structure Model Reference Adaptive System Speed Identification of Bearingless Induction Motor. Energies. 2024; 17(11):2615. https://doi.org/10.3390/en17112615
Chicago/Turabian StyleBu, Wenshao, Wenqing Tao, and Youpeng Chen. 2024. "Research on Sliding Mode Variable Structure Model Reference Adaptive System Speed Identification of Bearingless Induction Motor" Energies 17, no. 11: 2615. https://doi.org/10.3390/en17112615
APA StyleBu, W., Tao, W., & Chen, Y. (2024). Research on Sliding Mode Variable Structure Model Reference Adaptive System Speed Identification of Bearingless Induction Motor. Energies, 17(11), 2615. https://doi.org/10.3390/en17112615